s120-111报文可能出现的问题
曲轴平衡机S120驱动系统报文通讯分析

曲轴平衡机 S120驱动系统报文通讯分析摘要曲轴平衡机上的S120驱动系统采用西门子370#标准报文来与电源模块通讯,采用自由报文与CU320以及驱动器通讯。
通过对曲轴平衡机S120驱动系统与PLC系统的报文通讯具体分析,来分析报文通讯的应用方法,并在现有报文基础上修正报文BICO互连缺陷及对应的PLC程序,使设备功能更加合理。
关键词:S120驱动系统;报文通讯;控制字;状态字;引言西门子SINAMICS驱动系统是当前在机械加工设备上应用极为广泛的变频器系统,SINAMICS系列中的SINAMICS S120 是集V/F 控制、矢量控制、伺服控制为一体的多轴驱动系统。
要实现PLC控制S120驱动系统实现控制功能必须与其实现通讯, PLC与S120系统通过通讯协议(报文)来实现数据传输。
本文主要从2个方面进行分析S120报文通讯在曲轴平衡机上的实际应用及改进:1.S120报文通讯介绍:标准报文和自由报文规则;2.曲轴平衡机S120系统报文通讯应用分析及现有报文通讯缺陷问题改进优化分析。
1S120系统报文通讯方式介绍设备要实现相应的功能,必须有控制器(PLC)发出相应的指令,S120的控制模块(CU)接收到指令后控制电源模块和电机模块执行对应的运动控制,如电机启动、旋转等。
设备常借助于PROFIBUS-DP来实现SIMATIC S7-300 与SINAMICS S120之间的数据交换,用S7-300来控制S120的运转及读写所需的参数。
S7-300 与SINAMICS S120交换的数据字的数量及各字的含义。
根据不同的应用来选择相应的报文(此处的报文是指通讯过程中的通讯协议)。
S120 中的报文结构分为三类:1、标准报文(1#、2#、3#、4#、5#、6#、7#、20#报文)标准报文是根据Profidrive规范制定的常规报文,当选择标准报文时,内部的过程参数会自动链接。
选择报文在参数P0922中设定,或者在组态驱动时选择。
S120常见故障处理
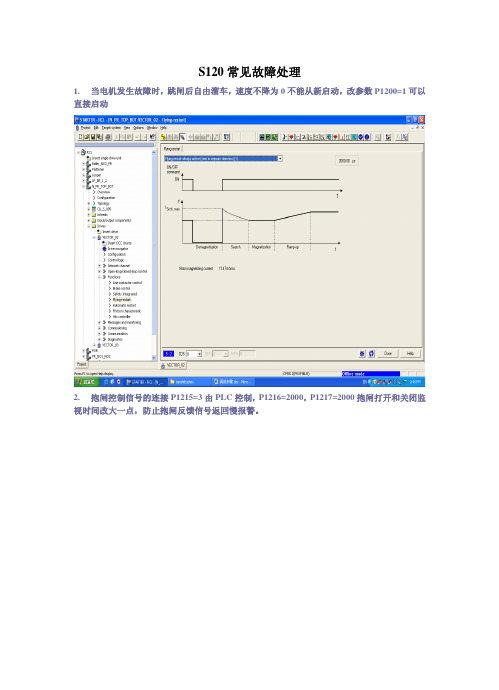
S120常见故障处理1.当电机发生故障时,跳闸后自由溜车,速度不降为0不能从新启动,改参数P1200=1可以直接启动2.抱闸控制信号的连接P1215=3由PLC控制,P1216=2000,P1217=2000抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警。
3.报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值。
改参数:P2175 =2.03%改到1.53% 速度设定监视极限值P2177=10s 改到15s 故障延时时间分两种情况(p1300≥20或p1300<20)p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization.p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode.p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotatingmeasurement and speed controller optimization can be selected.改参数:P1082 =110%改到115% 速度限幅值或者KP增大5.报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报故障。
改参数:P1745=20%改到25% 速度设定监视极限值P2178=10s 改到15s 故障延时时间6.报(A7903)堵转报警,即速度偏差大于设定值经过延时后报故障改参数:P2163 =20%改到30% 速度设定监视极限值P2166=200ms改到400ms 故障延时时间7.急停报F01611(F01600)F30611(F30600),检查急停继电器信号是否正常,并注意端子极性,Motor Module 和Control Unit 各封锁半个桥臂,并且两个信号在相同的延时后(CuP9650,MMP9850)同时收到,不然报故障,如果信号恢复后仍然不能复位,需重新上电。
西门子G120_CU250S-2调试总结之项目实战

G120_CU250S-2调试总结本文讲述应用G120_CU250S-2带台弯数格HFS210S电主轴,调试软件用独立版SCOUT,也可以STARTER和博图中STERDRIVER。
这里要实现的主要功能是在量时完成主轴的定向,在切削时实现主轴的高速转动。
(但在失量时变频器的转速是有限制的。
这就是我要解决的问题)CU250S-2是G120的控制器,需要安装在一个功率单元PM240-2。
目前西门子G120和S120的ACAC系列功率单元基本都用PM240-2。
CU250S-2需要授权卡,完成基本功能用基本授权卡。
完成定位功能需要带EPOS功能的授权卡。
这里需要准备几个手册方便调试。
《G120_CU250S2_EPos_FH10_0415_chs_zh-CHS》《G120_CU250S2_操作说明书》一、 接线根据手册要求连接动力线,制动电阻,和编码器线。
这里需要注意的就是编码器线。
SMC20接法可以参阅S120样本。
下图为本案中的连接方法。
编码器线 电主轴侧 线色,主轴端 线色 SMC20侧 1 1 A+ 绿 32 2 A- 红 43 3 R+ 灰 174 7 0V 黄 25 8 KTY84+ 白 136 9 KTY84- 黑 257 10 +5 棕 18 11 B+ 蓝 69 12 B- 紫 710 13 R- 粉 1815 0 红蓝 1616 5+ 灰粉 1417 shield12芯带屏蔽 12芯 实验中结论是编码器线用屏蔽电缆非常重要,否则会出现各种编码器类报警,有关于AB的有关于R的,接上屏蔽且屏蔽接地基本解决一切编码器报警。
另外SM20端16和14一定要接,电主轴端15/16在内部是和4/7相连的,可以把电主轴的15/16与SMC20的16/14相连。
SMC20的16/14是确认编码器是否正常上电,电压是否在正常范围,若遇到没有编码器反馈的可以把SMC20的16/14与电源智短上。
以上确认后基本上不会因为线路问题出报警。
S120控制单元cu320调试纪录
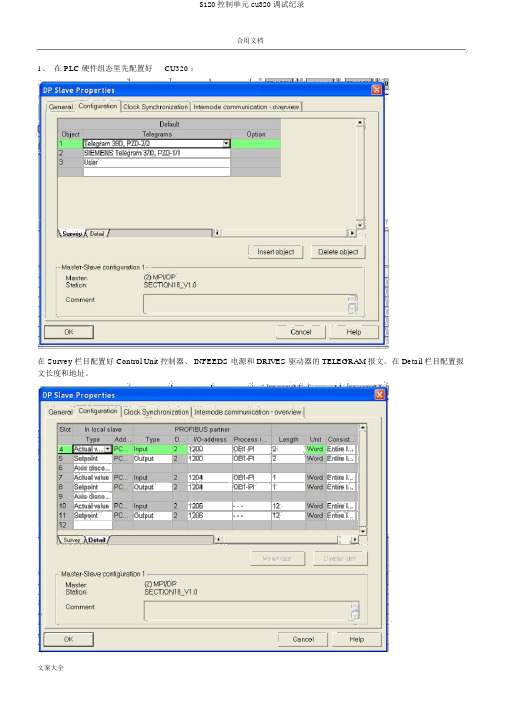
合用文档1、在 PLC 硬件组态里先配置好CU320 :在 Survey 栏目配置好 Control Unit 控制器、 INFEEDS 电源和 DRIVES 驱动器的 TELEGRAM 报文。
在 Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7 中会自动生成一个伺服配置:3、双击在 STARTER 中翻开所配置的伺服,选择ONLINE, 在线前需要将CU320 的 DP 拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo 后会自动生成一个根本配置〔包括Control Unit 控制器、 INFEEDS 电源和 DRIVES 驱动器 ,参数是自动读取上来的〕,第一需要对INFEEDS和DRIVES 配置 CONFIGURATION〔默认既可〕:5、尔后依照实质工程需要可能需要更正INFEEDS 和 DRIVES 中的一些参数EXPERT —-EXPERT LIST:INFEEDS:P10 –0 READY;1 — QUICK COMMISSIONING(更正某些参数时需要在 1 状态,更正完成后需要改为 0), P210 Drive unit line supply voltage驱动器实质供电电压可能和选型不一致。
DRIVES:Change parameter p1821 if need to change direction , p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust , p2585 jog speed若是采用手动方式,需要在Configure drive unit窗口中渐渐配置,并更正以上的参数。
6、报文配置 (包括控制器、电源和驱动器): COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
西门子S7-1200 1500 FB284控制S120实现基本定位功能说明书
/CN/view/zh/109765580C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1概述 ............................................................. 32SINA_POS(FB284)介绍 .. (33)SINA_POS 功能说明 ................................................. 63.1概述 ........................................................ 63.2功能块的运行模式介绍 ........................................ 63.2.1运行条件 .................................................... 63.2.2相对定位运行模式 ............................................ 63.2.3绝对定位运行模式 ............................................ 73.2.4连续运行模式(按指定速度运行) ................................ 83.2.5主动回零 .................................................... 93.2.6直接设置回零位置 ........................................... 103.2.7运行程序段 ................................................. 103.2.8按指定速度点动 ............................................. 113.2.9按指定距离点动 ............................................. 123.2.10运行中回零(被动回零) ....................................... 123.3基于ModePos 值的运行模式切换说明 (12)4项目配置 ........................................................ 134.1S120项目配置要点 ........................................... 134.2S7-1500项目配置步骤 (17)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1概述S7-1200/1500可以通过PROFINET 通信连接SINAMICS S120伺服驱动器,PLC 通过西门子提供的驱动库中的功能块FB284可实现S120的基本定位(EPOS )控制。
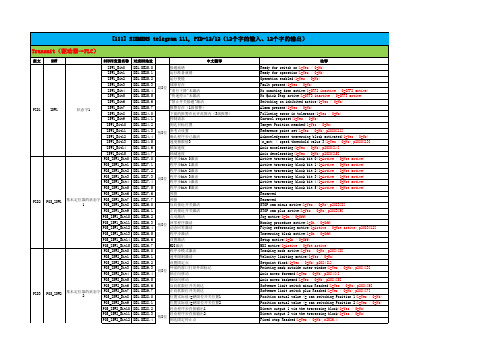
SINAMICS-S120-110报文

1 2 3 4 5
接近开关
1
接近开关
2
1
2
0
r51.1 r51.2 r51.3 r51.4 r896.0 r1406.8 r835.0 2089[2]
9
p2654
r2050 bit
2089[0] r899.0 r899.1 r899.2 r2139.3 r899.4 r899.5 r899.6 r2139.7 r2684.8 r899.9 r2684.10 r2684.11 r2684.12 r2199.0 r2670 r2670.0 r2670.1 r2670.2 r2670.3 r2670.4 r2670.5 r2670.15 r2683 r2683.0 r2683.1 r2683.2 r2683.4 r2683.5 r2683.6 r2683.7 r2683.8 r2683.9 r2683.10 r2683.11 2089[1] r51.0
r2521
DDS有效
位DDS有效
1
位DDS有效
2
位DDS有效
3
位驻留轴生
4
效运行到固
定电档机块切有换
有效
状实态际字位3置
值
1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否
1=是0否 1=是0否 1=是0否 1=是0否 1=是0否 1=是0否
回原点参考凸轮
PosSTW.5
S120控制单元cu320 调试纪录
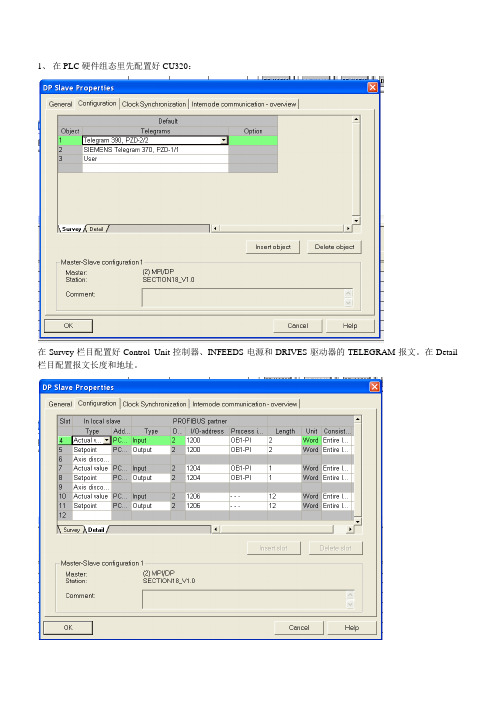
1、在PLC硬件组态里先配置好CU320:在Survey栏目配置好Control Unit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail 栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括Control Unit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS 和DRIVES配置CONFIGURATION(默认既可):5、然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERT LIST: INFEEDS: P10 –0 READY;1—QUICK COMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0), P210 Drive unit line supply voltage驱动器实际供电电压可能和选型不一致。
DRIVES: Change parameter p1821 if need to change direction,p2571 for max speed, p2572 for acceleration adjust,p2573 for deceleration adjust,p2585 jog speed如果采用手动方式,需要在Configure drive unit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):COMMUNICATION--PROFIBUS7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:COMMISSIONING – CONTROL PANEL(必须在ONLINE)9、设置原点:在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCE POINT SET左边状态灯变成绿色。
s120使用心得

S120调试常见问题汇总项目配置目前做S120项目配置时有starter和scout这2种常用软件,版本最好为V4.1以上,starter使用较多,现只对starter进行叙述。
打开starter软件后出现如下画面:点击project选项后选择new或new with wizard新建一个项目如果选择通过向导新建项目时会出现如下窗口1为离线配置项目,2为在线配置,3为打开已有项目如选择2在线配置时,先要将适配器连接至S120控制器,然后按照向导提示执行配置即可完成,适配器连接S120具体过程可参看S120调试手册。
选择1或选择new离线新建一个项目时,输入完项目名称和存储路径后会出现如下图示:点击插入一个控制单元后弹出如下窗口:1选择设备系列,2选择具体设备和型号,3版本号,4通讯方式和地址。
本例选择的是CU320控制器,配置完成后出现如下窗口:在驱动器选项下点击插入驱动器,在驱动器类型里选择类型:servo伺服和vector矢量,其他选项可自行填写。
如选择伺服控制后会出现如下窗口:图1在功能选择中,本例用到基本定位功能,如有其他要求,可选择相应选项,选择不同选项后会对后面配置有影响。
可参看S120调试手册。
控制类型选择带编码器速度反馈。
点击下一步后出现功率单元的配置如图:按照实物选择相应的电压等级,冷却方式和具体型号,配置完后出现如下窗口选择跟功率单元相匹配的适配器型号,此选项受前面控制器型号影响略有不同。
然后进行电机配置,由于是伺服控制,并选用西门子自己的电机,故选择带DRIVE-CLiQ 接口的电机,如是其它电机则选择相应的电机型号,然后对报闸控制进行设定。
下一步对编码器进行设定1为西门子伺服电机自带编码器,带drive-CliQ通讯口,上面配置电机时已设定,故系统自认定,选项灰色不可改变。
2为自定义编码器,如有需要可勾选,并在3处定义编码器具体型号。
并在下一选项中选择哪一编码器做定位控制用。
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计高挺;朱晓民;张希;程金【摘要】针对自动化系统中集成S120伺服驱动模块时遇到的控制及通讯难题,设计了基于111报文的S7-300通讯控制程序模块Servo120。
使得从事自动化工作的工程师可以通过该模块简单、快捷的实现S7控制系统与S120伺服驱动模块的通讯,并通过报文方式实现S7-300PLC对S120伺服驱动模块的速度与位置控制。
模块对报文中的控制及状态字进行详细解析,大大提高了调试诊断效率。
并设置了多点联动,速度转换等模式,极大的方便了现场应用,提高了系统集成过程的效率并降低了操作难度。
【期刊名称】《制造业自动化》【年(卷),期】2016(038)010【总页数】3页(P67-69)【关键词】S120伺服驱动模块;111报文;程序模块【作者】高挺;朱晓民;张希;程金【作者单位】北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120【正文语种】中文【中图分类】TP23当今,企业对生产设备的要求是设备生产成本越来越低,但同时能够提供越来越高的生产效率。
SINAMICSS120伺服驱动模块因恰恰能满足这些方面的要求而被广泛应用于自动化系统中。
对于自动化系统集成商而言,伺服系统的好处虽然很多,但其与中央控制器的融合过程往往因工程师经验不足等原因而变得比较困难。
本文以S7-300与S120通讯的111报文为基础,对其进行深入解读,设计出一款专用通讯控制程序模块。
为S120伺服驱动模块在以S7-300为核心的自动化系统中的应用带来了极大的便利。
通讯控制程序模块的设计是基于S7-300的PLC与S120通讯111报文的,因此模块环境平台的搭建如下:在S7硬件中配置S120硬件(如图1硬件配置),在整个项目中集成S7-300CPU作为整个系统的核心控制器、S120伺服驱动模块、MP277人机交互触摸屏系统(如图2项目配置),以图3网络连接所示的方式通过PROFIBUS网络组成统一的系统。
S120故障和报警代码

故障和报警列表F01000 内部软件错误F01001 浮点例外F01002 内部软件错误F01003 访问存储器时出现应答延迟N01004 (F, A) 内部软件错误F01005 下载 DRIVE-CLiQ 组件的固件失败A01006 DRIVE-CLiQ 组件的固件需要升级A01007 DRIVE-CLiQ 组件需要重新上电A01009 (N) CU: 控制单元过热F01010 驱动类型不明F01011 (N) 下载中断F01012 (N) 项目转化出错A01013 控制单元:达到或超过风扇的使用寿命F01015 内部软件错误A01016 (F) 固件被修改A01017 组件列表被更改A01020 写 RAM 失败F01023 内部软件超时F01030 控制权下的生命符号出错F01031 “远程模式关”下的生命符号出错A01032 (F) ACX:需要存储所有参数F01033 单位转换:参考参数无效F01034 单位转换:参考值更改后参数值计算失败A01035 (F) ACX:参数备份文件损坏F01036 (A) ACX:缺少参数备份文件F01038 (A) ACX:载入参数备份文件失败F01039 (A) ACX:写入参数备份文件失败F01040 需要备份参数并重新上电F01040 需要备份参数并重新上电F01041 需要备份参数F01042 下载项目时的参数出错F01043 在项目下载时出现严重错误F01044 CU:描述数据出错A01045 CU:设计数据无效A01049 CU:无法写入文件F01050 存储卡和设备不兼容F01054 CU:超出系统极限F01055 CU:内部错误(应用和端口的 SYNO 不相同)F01056 CU:内部错误(参数组时钟周期已经分配,但有偏差)F01057 CU:内部错误(从站的 DRIVE-CLiQ 类型不同)F01058 CU:内部错误(拓扑结构中没有从站)F01059 CU:内部错误(端口不存在)F01060 CU:内部错误(参数组不存在)F01061 CU:内部错误(应用未知)F01063 CU:内部错误(PDM)A01064 (F) CU:内部错误(CRC)F01068 CU:数据存储器溢出A01069 参数备份文件和设备不兼容F01070 正在向存储卡进行项目/固件下载F01072 从备份文件中修复存储卡A01073 备份文件至存储卡上需要上电A01099 超出时间同步公差范围A01100 CU:存储卡已拔出F01105 (A) CU:存储器容量不足F01106 CU:存储器容量不足F01107 CU:保存到非易失性存储器的操作失败F01110 CU:一个控制单元上不止一个 SINAMICS GF01111 CU:不允许驱动设备混合运行F01112 CU:功率单元非法F01120 (A) 初始化端口失败F01122 (A) 测量探头输入端的频率过高F01122 (A) 测量探头输入端的频率过高F01123 功率单元不支持数字输入/输出端F01150 CU:超过了某一驱动对象类型的实例数F01151 CU:超出了某一类别驱动对象的数量F01200 CU: 时间片管理内部软件错误F01205 CU:时间片溢出F01221 CU:基本周期太小F01222 CU:基本时钟周期太小(没有用于通讯的计算时间)A01223 CU:采样时间不一致A01224 CU:脉冲频率不一致F01250 CU:CU-EEPROM 只读数据出错A01251 CU:CU-EEPROM 读写数据出错F01255 CU:插件板 EEPROM 只读数据出错A01256 CU:插件板 EEPROM 读写数据出错F01303 DRIVE-CLiQ 部件不支持所要求的功能A01304 (F) DRIVE-CLiQ 组件的固件不是最新版本F01305 拓扑结构:缺少组件号A01306 正在升级 DRIVE-CLiQ 组件的固件A01314 拓扑结构:不应存在该组件A01315 驱动对象不可以运行A01316 驱动对象无效且再次可以运行A01317 (N) 禁用的组件再次存在A01318 BICO: 存在断开的连接A01319 插入的组件没有初始化A01320 拓扑结构:配置中缺少驱动对象编号A01321 拓扑结构:配置中没有驱动对象编号A01322 拓扑结构:配置中驱动对象编号重复存在A01323 拓扑结构:编制了两个以上的子列表A01324 拓扑结构:驱动对象编号哑元创建错误F01325 拓扑结构:设定拓扑结构中不包含该组件号A01330 拓扑结构:无法快速调试A01331 拓扑结构:至少一个组件没有分配给驱动对象F01340 拓扑结构:一个支路上的组件过多F01341 拓扑结构:超出了 DRIVE-CLiQ 组件的最大数量F01354 拓扑结构:实际拓扑结构存在错误的组件F01355 拓扑结构:实际拓扑结构已更改F01356 拓扑结构:存在损坏的 DRIVE-CLiQ 组件F01357 拓扑结构:在 DRIVE-CLiQ 支路上发现了两个控制单元A01358 拓扑结构:没有支路终端F01359 拓扑结构:DRIVE-CLiQ 性能不足F01360 拓扑结构:实际拓扑结构非法A01361 拓扑结构:实际拓扑结构包括 SINUMERIK 和 SIMOTION 组件A01362 拓扑结构:违反拓扑结构规定F01375 组件:两个组件之间实际拓扑结构连接重复F01380 拓扑结构:实际拓扑结构损坏的 EEPROMA01381 拓扑结构:比较功率单元发现偏差A01382 拓扑结构:比较编码器模块发现偏差A01383 拓扑结构:端子模块比较发现偏差A01384 拓扑结构:比较 DRIVE-CLiQ 集线器模块发现偏差A01385 拓扑结构:比较 CX32 发现偏差A01386 拓扑结构:比较 DRIVE-CLiQ 组件发现偏差A01387 拓扑结构:比较选件槽组件发现偏差A01388 拓扑结构:比较EnDat编码器发现偏差A01389 拓扑结构:比较带 DRIVE-CLiQ 的电机发现偏差A01416 拓扑结构:实际拓扑结构中多出组件A01420 拓扑结构:比较单个组件发现偏差A01421 拓扑结构:比较多个组件发现偏差A01425 拓扑结构:比较组件序列号发现偏差A01428 拓扑结构:比较组件连接发现偏差A01429 拓扑结构:比较多个组件连接发现偏差F01451 设定拓扑结构无效F01470 拓扑结构:发现设定拓扑结构环形连接F01475 拓扑结构:两个组件之间设定拓扑结构连接重复A01481 拓扑结构:比较实际拓扑结构中缺少功率单元A01482 拓扑结构:比较实际拓扑结构中缺少编码器模块A01483 拓扑结构:比较实际拓扑结构中缺少端子模块A01484 拓扑结构:比较实际拓扑结构中缺少 DRIVE-CLiQ 集线器模块A01485 拓扑结构:比较实际拓扑结构中缺少 CX32A01486 拓扑结构:比较实际拓扑结构中缺少 DRIVE-CLiQ 部件A01487 拓扑结构:比较实际拓扑结构中缺少“选件槽组件”A01488 拓扑结构:在实际拓扑结构中缺少EnDat编码器A01489 拓扑结构比较:实际拓扑结构中缺少带 DRIVE-CLiQ 的电机F01505 (A) BICO:无法建立连接F01506 (A) BICO: 无标准报文A01507 (F, N) BICO:有至未激活对象的连接A01508 BICO:超出未激活对象的连接数F01510 BICO:信号源不是浮点F01511 (A) BICO:连接有不同定标F01512 BICO:没有定标F01513 (N, A) BICO:不同驱动对象之间的连接有不同定标A01514 (F) BICO:在重新连接期间写入时出错F01515 (A) BICO: 不允许写入参数,因为控制权有效A01590 (F) 驱动:电机维修间隔到期F01600 SI CU:STOP A 被触发F01611 (A) SI CU:某一监控通道故障F01612 SI CU: 并联功率单元上 STO 输入不同N01620 (F, A) SI CU:Safe Torque Off激活N01621 (F, A) SI CU: Safe Stop 1 激活F01625 SI CU:安全数据中生命符号出错F01630 SI CU: 制动控制出错A01631 (F, N) SI CU:电机抱闸/SBC 配置无意义F01649 SI CU: 内部软件错误F01650 SI CU: 必须进行验收测试F01651 SI CU:安全时间片同步失败F01652 SI CU: 非法的监控周期F01653 SI CU: PROFIBUS/PROFINET 配置出错A01654 (F) SI CU: PROFIsafe 配置有差异F01655 SI CU:监控功能的对比F01656 SI CU:电机模块参数出错F01657 SI CU: PROFIsafe 报文号无效F01658 SI CU: PROFIsafe报文号不一致F01659 SI CU:参数的写入任务被绝F01659 SI CU:参数的写入任务被绝F01660 SI CU:不支持安全功能F01661 SI CU: 安全输入端模拟激活F01663 SI CU:SI 参数复制被拒绝F01664 SI CU:无自动固件升级F01665 SI CU: 系统故障A01666 (F) SI 运动 CU:F-DI 上用于安全应答的静态 1 信号A01669 (F, N) SI 运动:电机和功率单元的组合无效F01670 SI 运动:编码器模块参数设置无效F01671 SI 运动:编码器参数设置出错F01672 SI CU:电机模块软件/硬件不兼容F01673 SI 运动:编码器模块软件/硬件不兼容F01674 SI 运动 CU:PROFIsafe 报文不支持安全功能F01680 SI 运动 CU:安全监控校验和错误F01681 SI 运动 CU:参数值误F01682 SI 运动 CU:不支持监控功能F01683 SI运动 CU:缺少 SOS/SLS 使能F01684 SI 运动:Safely-Limited Position 极限值混淆F01685 SI 运动 CU:Safely-Limited Speed 的极限值过大F01686 SI 运动:凸轮位置参数设置出错F01687 SI 运动:SCA (SN) 模数值设定出错F01688 SI运动CU:不允许实际值同步C01689 SI 运动:轴配置改变F01690 SI 运动: NVRAM 上的数据备份问题A01691 (F) SI 运动:Ti 和 To 不适用于 DP 周期F01692 SI运动CU:无编码器时参数值错误A01693 (F) SI CU:安全参数已修改,需要热启动/上电F01694 (A) SI 运动 CU: 电机模块的固件版本低于控制单元A01695 (F) SI 运动:编码器模块被更换A01696 (F) SI 运动: 运动监控测试在启动中被选中A01697 (F) SI 运动: 需要运动监控测试A01698 (F) SI CU: 调试模式激活A01699 (F) SI CU: 断路路径测试C01700 SI 运动 CU:STOP A 被触发C01701 SI 运动 CU:STOP B 被触发C01706 SI 运动 CU:超出 SAM/SBR 极限C01707 SI 运动 CU:超出 Safe Operating Stop 公差C01708 SI 运动 CU:STOP C 被触发C01709 SI 运动 CU:STOP D 被触发C01710 SI 运动 CU:STOP E 被触发C01711 SI 运动 CU:某一监控通道故障C01712 SI 运动CU:F-IO 处理时出现故障C01714 SI 运动 CU:超出 Safely-Limited SpeedC01715 SI 运动 CU:超出 Safely-Limited PositionC01716 SI 运动 CU:超出安全运动方向的公差C01730 SI 运动 CU:动态安全限制转速的参考程序段无效C01745 SI 运动 CU:检查制动测试时的制动转矩C01750 SI 运动 CU:编码器硬件故障C01751 SI 运动 CU:安全编码器有效性测试故障C01770 SI 运动 CU:故障安全输入/输出的差异性错误A01772 SI 运动 CU:故障安全输入/输出正在执行“强制故障检查”F01773 SI 运动 CU:强制故障检查错误A01774 SI 运动 CU :“强制故障检查”未执行A01780 SBT 选择时制动已闭合A01781 超出 SBT 制动打开时间A01782 SBT 制动测试:控制错误A01783 超出 SBT 制动闭合时间A01784 SBT 制动测试因故障终止A01785 SBT 制动测试配置错误F01786 SCC 信号被修改F01787 SBT 电机类型不同A01795 SI 运动 CU: 退出安全脉冲删除状态后等待时间届满A01796 (F, N) SI CU: 等待通讯C01797 SI 运动 CU:轴未安全回参考点C01798 SI 运动 CU:正在进行“强制故障检查”C01799 SI 运动 CU:处于验收测试模式F01800 DRIVE-CLiQ:硬件/配置出错A01839 DRIVE-CLiQ 诊断:组件电缆故障A01840 SMI: 检测出没有电机数据的组件A01900 (F) PB/PN: 配置报文出错A01902 错误的 PB/PN 等时同步运行设置A01903 (F) COMM INT:接收配置数据无效F01910 (N, A) 现场总线设定值超时F01911 (N, A) PB/PN 等时同步周期故障F01912 (N, A) PB/PN 等时同步中生命符号出错F01913 (N, A) COMM INT:生命符号监控时间结束F01914 (N, A) COMM INT:配置监控时间结束F01915 (N, A) PB/PN 同步运行,驱动对象 1 生命符号出错A01920 (F) PROFIBUS:循环连接中断A01921 (F) PROFIBUS: 在 To 后接收设定值A01930 PB/PN 等时同步中电流环周期不相同A01931 PB/PN 等时同步中转速环周期不相同A01932 DSC中缺少 PB/PN 等时同步A01940 未达到 PB/PN 等时同步A01941 总线拓扑结构中缺少 PB/PN 周期信号A01943 总线拓扑结构中 PB/PN 周期信号受干扰A01944 未达到 PB/PN 生命符号同步A01945 PROFIBUS:和发布方的连接故障F01946 (A) PROFIBUS:和发布方的连接中断F01950 (N, A) PB/PN 等时同步失败F01951 CU DRIVE-CLiQ: 缺少同步应用周期F01952 CU DRIVE-CLiQ: 不支持组件同步A01953 CU DRIVE-CLiQ: 同步未结束F01954 CU DRIVE-CLiQ: 同步未成功A01955 CU DRIVE-CLiQ: DO 同步未结束A01980 PN:循环连接中断A01981 PN: 超出最大控制器数量A01982 PROFINET: 缺少第二个控制器A01989 PROFINET:循环数据传输时内部错误A01990 (F) USS: PZD 配置出错A02000 函数发生器:无法启动A02005 函数发生器:驱动不存在A02006 函数发器:未指定用于接入的驱动A02007 函数发生器:驱动不是 SERVO/VECTOR/DC_CTRL A02008 函数发生器:驱动被多次指定A02009 函数发生器:错误的运行方式A02010 函数发生器:驱动的转速设定值不为零A02011 函数发生器:驱动的转速实际值不为零A02015 函数发生器:缺少驱动使能A02016 函数发生器:正在励磁A02020 函数发生器:参数不可更改A02025 函数发生器:周期过短A02026 函数发生器:脉冲宽度过大A02030 函数发生器:物理地址等于零A02040 函数发生器:错误的偏移值A02041 函数发生器:错误的带宽值A02047 函数发生器:时间片周期无效A02050 跟踪:无法启动A02055 跟踪:记录时间过短A02056 跟踪:记录周期过短A02057 跟踪:时间片周期无效A02058 跟踪:循环跟踪的时间片周期无效A02059 跟踪:2 x 8 记录通道的时间片周期无效A02060 跟踪:缺少需要记录的信号A02061 跟踪:信号无效A02062 跟踪:触发器信号无效A02063 跟踪:数据类型无效A02070 跟踪:参数不可更改A02075 跟踪:预触发时间过长F02080 跟踪:参数设置由于单位转换被删除A02097 MTrace:无法激活多次跟踪A02098 MTrace:无法保存A02099 跟踪:控制单元的存储空间不足A02100 驱动:电流环计算时滞太短A02150 OA:应用程序无法载入F02151 (A) OA: 内部软件错误F02152 (A) OA: 存储器容量不够F03000 操作时的 NVRAM 错误F03001 NVRAM 校验和出错F03500 (A) TM:初始化A03501 TM:采样时间被修改F03505 (N, A) CU:模拟输入端断线F03505 (N, A) TM:模拟输入端断线F03505 (N, A) 模拟输入端断线F03505 (N, A) TM:模拟输入端断线A03506 (F, N) 缺少 24 V电源A03507 (F, N) 数字输出未设置A03507 (F, N) 数字输出未设置A03510 (F, N) CU:校准数据不合理A03510 (F, N) TM:校准数据不合理A03550 TM:转速设定值滤波固有频率>香农频率F03590 (N, A) TM:模块未就绪A05000 (N) 功率单元:逆变器散热器过热A05001 (N) 功率单元:绝缘层芯片过热A05001 (N) 功率单元:绝缘层芯片过热A05002 (N) 功率单元:进风过热A05003 (N) 功率单元:内部空间过热A05004 (N) 功率单元:整流器过热A05005 冷却单元:冷却剂体积流量太低A05006 (N) 功率单元:热模型过热N05007 (A) 功率单元:热模型过热(装机装柜型功率单元)F05050 并联电路:尽管脉冲禁止,仍然报告脉冲使能F05051 并联电路:缺少功率单元脉冲使能A05052 (F) 并联电路:电流不平衡错误A05053 (F) 并联电路:直流母线电压不平衡错误A05054 并联电路:禁用功率单元F05055 并联电路:功率单元代码号非法F05055 并联电路:功率单元代码号非法F05056 并联电路:功率单元EPROM版本不同F05057 并联电路:功率单元固件版本不同F05058 并联电路:VSM EEPROM 版本不同F05059 并联电路:VSM 固件版本不同F05060 并联电路:功率单元固件版本不兼容F05061 整流单元 VSM 数量F05064 并联:脉冲同步错误F05118 (A) 超出预充电接触器同步监控时间F05119 (A) 超出分路接触器同步监控时间F06000 整流单元:预充电监控时间已结束F06010 整流单元:运行中缺少功率单元 EP 24 VF06050 整流单元:不支持非调节模式F06052 整流单元:不支持滤波器温度检测F06100 整流单元:由于主电源欠电压断路A06105 (F) 整流单元:主电源欠压F06200 整流单元:一个或者多个主电源相位故障A06205 (F) 整流单元:至少在一个主电源相位出现电压暂降F06207 (N, A) 整流单元:输入电流不对称F06210 整流单元:总电流过高F06211 整流单元:总电流过高F06211 整流单元:总电流过高A06215 (F) 整流单元:总电流过高A06250 (F, N) 整流单元:输入滤波器的电容器至少在一个相位损坏A06260 整流单元:输入滤波器温度过高F06261 整流单元:输入滤波器温度持续过高F06262 整流单元:接通时输入滤波器内的温度开关打开F06300 整流单元:在接通时输入电压过高A06301 (F) 整流单元:主电源过电压F06310 (A) 整流单元:输入电压(p0210)参数设定错误F06310 (A) 输入电压(p0210)参数设定错误F06311 整流单元:输入电压(p0210)故障F06320 主站/从站:4 通道多路转换器控制无效F06321 主站/从站:6 通道多路换器控制无效A06350 (F) 整流单元:测得的输入频率过高A06351 (F) 整流单元:测得的输入频率过低A06400 整流单元:主电源数据检测被选择/生效A06401 整流单元:变压器数据检测模式/测试模式被选中/生效F06500 整流单元:无法和主电源同步A06502 (F, N) 整流单元:在变压器励磁中未和主电源同步F06503 整流单元:电网黑启动失败F06504 整流单元:孤岛电网同步失败A06601 (F) 整流单元:电流偏差测量中断A06602 (F) 整流单元:无法进行电流偏移测量F06700 (A) 整流单元:负载时接通电源接触器A06800 (F) 整流单元:达到最大的直流母线稳态电压A06810 (F) 整流单元:直流母线电压报警阈值A06849 (F, N) 整流单元:短路运行生效F06850 整流单元:短路时间过长F06851 整流单元:分布式整流单元的电源监控已触发F06855 整流单元:输入滤波器监控已响应A06860 整流单元:无法激活功能模块A06900 (F) 制动模块:故障(1 -> 0)A06901 制动模块:I2t 关机预警A06904 (N) 制动模块被内部禁用A06905 制动模块内部 I2t 断路报警信息F06906 (A) 制动模块内部故障信息F06907 制动模块内部过热F06908 制动模块内部过热/断路F06909 制动模块内部 Uce 故障A06921 (N) 制动电阻相位不对称F06922 制动电阻断相F07011 驱动:电机超温F07011 驱动:电机超温A07012 (N) 驱动:电机温度模型 1/3 超温A07012 (N) 驱动:电机温度模型 1 过热F07013 驱动:电机温度模型配置故障A07014 (N) 驱动:电机温度模型配置报警A07014 (N) 驱动:电机温度模型配置报警A07015 驱动:电机温度传感器的报警信息F07016 驱动:电机温度传感器的故障信息A07017 超出附加温度报警阈值F07018 超出附加温度故障阈值F07080 驱动:闭环控制参数出错F07082 宏文件:无法执行F07083 宏文件:找不到 ACX 文件F07084 宏文件:未满足 WaitUntil 的条件F07085 驱动:开环控制/闭环控制参数被更改F07086 单位转换: 由于参考值改变而超出参数极限F07087 驱动:在设定的脉冲频率下无法进行无编码器运行F07088 单位转换: 由于单位转换而超出参数极限A07089 单位转换:转换单位后不能激活功能块F07090 驱动:转矩上限小于下限F07100 驱动:采样时间不可复位F07110 驱动:采样时间和基本周期不匹配A07140 驱动:电流环采样时间和主轴不配套A07200 驱动:控制权发出 ON 指令F07220 (N, A) 驱动:缺少“通过PLC控制”F07300 (A) 驱动:缺少电源接触器反馈信息F07311 电机旁路开关F07312 电源旁路开关F07320 驱动:自动重启中断F07320 驱动:自动重启中断A07321 驱动:自动重启激活A07329 (N) 驱动: kT 评定器, kT(iq) 特征曲线或电压补偿失效F07330 捕捉再启动:测得的搜索电流过小F07331 捕捉再启动: 不支持该功能A07350 (F) 驱动:测量头设为数字输出A07351 (F) 驱动:测量头设为数字输出A07354 驱动:无法进行齿槽转矩补偿A07400 (N) 驱动:最大直流母线电压控制器生效A07400 (N) 驱动:最大直流母线电压控制器生效A07401 (N) 驱动:最大直流母线电压控制器关闭A07402 (N) 驱动:最小直流母线电压控制器生效A07402 (N) 驱动:最小直流母线电压控制器生效F07403 (N, A) 驱动:达到直流母线电压阈值下限F07403 (N, A) 驱动:达到直流母线电压阈值下限F07404 驱动:达到直流母线电压阈值上限F07404 驱动:达到直流母线电压阈值上限F07405 (N, A) 驱动:低于动能缓冲下的最低转速F07406 (N, A) 驱动:超出动能缓冲状态下最大持续时间F07407 驱动:不允许 Vdc 降低A07409 驱动:V/f控制电流限值控制器生效F07410 驱动:电流环输出受限F07410 驱动:电流环输出受限F07411 驱动:磁通控制器输出受限F07412 驱动:换向角出错(电机模型)F07413 驱动:换向角出错(磁极位置检测)F07414 (N, A) 驱动:编码器序列号改变N07415 (F) 驱动:正在传送换向角偏移A07416 驱动:磁通控制器配置F07417 驱动脉冲方式不合理(电机模型)F07419 驱动:电流设定值滤波器自适应配置不一致F07420 驱动:电流设定值滤波器固有频率>香农频率F07420 驱动:电流设定值滤波器固有频率>香农频率F07421 驱动:转速滤波器固有频率>香农频率F07422 驱动:参考模型固有频率>香农频率F07423 驱动:APC 滤波器固有频率>香农频率A07424 驱动:APC 的运行条件无效F07425 驱动:APC 转速极限监控时间超期F07426 (A) 工艺控制器实际值达到极限值A07428 (N) 工艺控制器参数设置错误F07429 驱动:无编码器时不支持 DSCF07430 驱动:无法切换到转矩开环运行F07431 驱动:无法切换到无编码器运行F07432 驱动:电机无过压保护F07433 驱动:无法切换到带编码器运行,因为编码器没有解除驻留F07434 驱动:无法在脉冲使能时改变旋转方向F07435 (N) 驱动:无编码器的矢量控制,斜坡函数发生器设置错误F07439 驱动: 不支持该功能A07440 EPOS:急动时间达到了限值A07441 位置环:备份绝对值编码器调校的位置偏移F07442 (A) 位置环:多圈分辨率和模数范围不匹配F07443 (A) 位置环:参考点坐标超出允许范围F07446 (A) 负载变速箱:无法复位位置跟踪F07447 负载变速箱:位置跟踪超出最大实际值F07448 (A) 负载变速箱:位置跟踪线性轴超出最大范围F07449 (A) 负载变速箱:位置跟踪当前位置在公差范围之外F07450 (A) 位置环: 静态监控已响应F07451 (A) 位置环: 定位监控已响应F07452 (A) 位置环:跟随误差过大F07453 位置环:位置实际值处理出错A07454 位置环:位置实际值处理没有有效的编码器A07455 EPOS:最大速度受限A07456 EPOS:设定速度受到限制A07457 EPOS:输入信号组合错误F07458 EPOS:未找到参考点凸轮F07459 EPOS:不存在零脉冲F07460 EPOS:未找到参考点凸轮结束点A07461 EPOS:未设置参考点A07462 EPOS:所选运行程序段编号不存在A07463 (F) EPOS:在运行程序段中不要求进行外部程序段切换F07464 EPOS:运行程序段不一致A07465 EPOS:运行程序段没有后续程序段A07466 EPOS:多次配运行程序段编号A07467 EPOS:运行程序段包含错误的任务参数A07468 EPOS:运行程序段跳转目标不存在A07469 EPOS:运行程序段目标位置 < 负软件限位开关A07470 EPOS:运行程序段目标位置 > 正软件限位开关A07471 EPOS:运行程序段目标位置在模数范围之外A07472 EPOS: 运行程序段 ABS_POS/ABS_NEG 不可能A07473 (F) EPOS:到达运行范围起始处A07474 (F) EPOS:到达运行范围结束处F07475 (A) EPOS:目标位置 < 运行范围起始处F07476 (A) EPOS:目标位置 > 运行范围结束处A07477 (F) EPOS:目标位置 < 负软件限位开关A07478 (F) EPOS:目标位置 > 正软件限位开关A07479 EPOS:逼近负软件限位开关A07480 EPOS:逼近正软件限位开关F07481 (A) EPOS:轴位置 < 负软件限位开关F07482 (A) EPOS:轴位置 > 正软件限位开关A07483 EPOS:运行到固定挡块,未达到夹紧转矩F07484 EPOS:固定挡块在监控窗口之外F07485 (A) EPOS:未到达固定挡块A07486 EPOS: 中间停缺失A07487 EPOS:缺少运行任务取消F07488 EPOS:无法相对定位A07489 EPOS:参考点补偿在窗口之外F07490 (N) EPOS:运行时取消使能F07491 (A) EPOS:到达负停止凸轮F07492 (A) EPOS:到达正停止凸轮F07493 位置环:位置实际值的值范围溢出F07494 位置环:在运行时切换驱动数据组A07495 (F) 位置环:参考功能中断A07496 EPOS:无法使能A07497 位置环:位置设置值已激活A07498 (F) 位置环:无法进行测量头分析F07499 (A) EPOS:沿错误方向到达反向凸轮F07500 驱动:未定义功率单元数据组 PDSF07501 驱动:未定义电机数据组 MDSF07502 驱动:未定义编码器数据组 EDSF07503 EPOS:沿错误运行方向逼近停止凸轮A07504 驱动:电机数据组没有分配到驱动数据组A07505 EPOS: 在 V/f/SLVC 控制中无法执行固定挡块任务F07509 驱动:缺少组件号F07510 驱动:驱动数据组中有相同的编码器F07511 驱动:编码器多次使用F07512 驱动:无法设定编码器数据组转换参数A07514 (N) 驱动:数据结构和接口模式不相符F07515 驱动:功率单元和电机连接错误F07516 驱动:重新调试数据组F07517 驱动:编码器数据组转换参数设置错误F07518 驱动:电机数据组转换参数设置错误A07519 驱动:电机切换的参数设定错误A07520 驱动:无法执行电机切换A07530 驱动:驱动数据组 DDS 不存在A07531 驱动:指令数据组 CDS 不存在A07541 驱动:无法进行数据组转换A07550 (F, N) 驱动:无法复位编码器参数F07551 驱动编码器:没有换向角信息F07552 (A) 驱动编码器:不支持编码器配置F07553 (A) 驱动编码器:不支持编码器模块配置F07555 (A) 驱动编码器:位置跟踪配置F07556 测量变速箱:位置跟踪超出最大实际值A07557 (F) 编码器 1:参考点坐标超出允许范围A07558 (F) 编码器 2:参考点坐标超出允许范围A07559 (F) 编码器 3:参考点坐标超出允许范围F07560 驱动编码器:线数不是二的幂次方F07561 驱动编码器:多圈线数不是二的幂次方F07562 (A) 驱动编码器:增量编码器无法进行位置跟踪F07563 (A) 驱动编码器:XIST1_ERW 配置错误A07565 (F, N) 驱动:在 PROFIdrive 编码器接口 1 上的编码器错误A07566 (F, N) 驱动:在 PROFIdrive 编码器接口 2 上的编码器错误A07567 (F, N) 驱动:在 PROFIdrive 编码器接口 3 上的编码器错误A07569 (F) 编码器无法被检测F07575 驱动:电机编码器未就绪A07576 驱动:由于故障无编码器运行生效A07577 (F) 编码器 1:无法进行测量头分析A07578 (F) 编码器 2:无法进行测量头分析A07579 (F) 编码器 3:无法进行测量头分析A07580 (F, N) 驱动:编码器模块的组件号错误A07581 (F) 编码器 1:位置实际值处理出错A07582 (F) 编码器 2:位置实际值处理出错A07583 (F) 编码器 3:位置实际值处理出错A07584 编码器 1:位置设置值已激活A07585 编码器 2:位置设置值已激活A07586 编码器 3:位置设置值已激活A07587 编码器 1: 位置实际值处理没有有效的编码器A07588 编码器 2: 位置实际值处理没有有效的编码器A07589 编码器 3: 位置实际值处理没有有效的编码器A07590 (F) 编码器 1:在运行时切换驱动数据组A07591 (F) 编码器 2:在运行时切换驱动数据组A07592 (F) 编码器 3:在运行时切换驱动数据组A07593 (F, N) 编码器 1:超出位置实际值的值域A07594 (F, N) 编码器 2:超出位置实际值的值域A07595 (F, N) 编码器 3:超出位置实际值的值域A07596 (F) 编码器 1:参考功能中断A07597 (F) 编码器 2:参考功能中断A07598 (F) 编码器 3:参考功能中断F07599 (A) 编码器 1:无法校准F07600 (A) 编码器 2:无法校准F07601 (A) 编码器 3:无法校准F07800 驱动:没有功率单元F07801 驱动:电机过电流F07801 驱动:电机过电流F07802 驱动:整流单元或者功率单元未就绪A07805 (N) 整流单元:功率单元过载 I2tA07805 (N) 驱动:功率单元过载 I2tF07807 驱动:检测出短路/接地F07808 (A) HF 阻尼器:阻尼未就绪F07810 驱动:功率单元 EEPROM 无额定数据F07815 驱动:功率单元已修改F07815 驱动:功率单元已修改F07815 驱动:功率单元已修改A07820 驱动:未连接温度传感器A07825 (N) 驱动:模拟运行已激活F07826 驱动:模拟运行的直流母线电压过高F07840 驱动:缺少整流单元运行F07841 (A) 驱动:取消整流单元运行A07850 (F) 外部报警 1A07851 (F) 外部报警 2A07852 (F) 外部报警 3F07860 (A) 外部故障 1F07861 (A) 外部故障 2F07862 (A) 外部故障 3。
西门子SINAMICS S120驱动系统在车身主拼夹具切换系统中的应用

西门子SINAMICS S120驱动系统在车身主拼夹具切换系统中的应用吕长亮【期刊名称】《《汽车工艺与材料》》【年(卷),期】2019(000)012【总页数】6页(P49-54)【关键词】SINAMICS; S120驱动系统; 夹具切换系统; 标准功能块【作者】吕长亮【作者单位】一汽模具制造有限公司长春 130011【正文语种】中文【中图分类】U4661 前言SINAMICS 驱动系统是西门子公司新一代驱动产品,它将逐步取代原有的MASTERDRIVES 及SIMODRIVE 系列的驱动系统。
SINAMICS 广泛应用于工业领域的机械设备生产和工厂设备,包括塑料、轧钢、机床、纺织、印刷、各种工业传送系统等各种方向。
SINAMICS 依照使用范围的不同,分为3 个系列即SINAMICS G、SINAMICS S、SINAMICS DC MASTER。
其中SINAMICS S120 是集V/F、矢量控制及伺服控制于一体的驱动控制系统,不仅能控制普通的三相异步电机,还能控制同步电机、扭矩电机及直线电机,同时还具备强大的进给轴绝对、相对定位功能。
主要介绍S7-300 与SINAMICS S120 通过PROFIBUS-DP 网络通讯,通过S120 基本定位功能,实现对2 套三相同步电机的切换运动的驱动,从而实现某汽车工厂焊装车间车身主焊线主拼夹具的切换功能。
2 SINAMICS S120驱动系统简介2.1 SINAMICS S120驱动系统组件SINAMICS S120 驱动系统由不同的模块组成,包括控制单元、电源模块、电机控制模块、制动模块、电机等系统组件。
SINAMICS S120 驱动系统组件示意见图1。
SINAMICS S120 驱动系统组件说明如下。
a.控制单元,驱动系统的大脑,负责控制和协调整个系统中的所有功能模块。
b.电源模块,即整流模块,将三相交流电整流成直流电,供给电机模块。
分为基本型、智能型和主动型。
S120报文参数地址对应
Transmit(驱动器→PLC)
报文 PZD1 PZD2 PZD3
ZSW ZSW1 POS_ZSW1 POS_ZSW2
SCOUT变量名称 对应DB地址
ZSW1_Bit0
ZSW1_Bit1
ZSW1_Bit2
POS_ZSW1_Bit13
POS_ZSW1_Bit14
POS_ZSW1_Bit15
POS_ZSW2_Bit0
POS_ZSW2_Bit1
POS_ZSW2_Bit2
POS_ZSW2_Bit3
POS_ZSW2_Bit4
POS_ZSW2_Bit5
POS_ZSW2_Bit6
基本定位器的状态字 POS_ZSW2_Bit7
POS_ZSW1_Bit2
POS_ZSW1_Bit3
POS_ZSW1_Bit4
POS_ZSW1_Bit5
POS_ZSW1_Bit6
基本定位器的状态字 POS_ZSW1_Bit7
1
POS_ZSW1_Bit8
POS_ZSW1_Bit9
POS_ZSW1_Bit10
POS_ZSW1_Bit11
POS_ZSW1_Bit12
中文翻译
接通就绪 运行准备就绪 运行使能 高8位 故障存在 "滑行下降"未激活 "快速停止"未激活 "禁止开关接通"激活 报警存在(1级报警) 下面的报警在允许范围内(3级报警) 控制请求 到达目标位置 低8位 参考点设置 确认程序步已激活 速度极限值3 轴加速度 轴减速度 程序步bit 0激活 程序步bit 1激活 程序步bit 2激活 高8位 程序步bit 3激活 程序步bit 4激活 程序步bit 5激活 预留 预留 反向接近开关激活 正向接近开关激活 点动激活 低8位 回零程序激活 动态回零激活 程序步激活 设置激活 MDI激活 程序步模式激活 速率限制激活 设置固定点 高8位 外部的窗口打印外部标记 轴正向移动 轴反向移动 反向软限位开关到达 正向软限位开关到达 位置实际值<=硬限位开关位置1 位置实际值<=硬限位开关位置2 经由程序步直接输出1 低8位 经由程序步直接输出2 到达固定停止点
S120故障和报警代码
故障和报警列表F01000 内部软件错误F01001 浮点例外F01002 内部软件错误F01003 访问存储器时出现应答延迟N01004 (F, A) 内部软件错误F01005 下载DRIVE-CLiQ 组件的固件失败A01006 DRIVE-CLiQ 组件的固件需要升级A01007 DRIVE-CLiQ 组件需要重新上电A01009 (N) CU: 控制单元过热F01010 驱动类型不明F01011 (N) 下载中断F01012 (N) 项目转化出错A01013 控制单元:达到或超过风扇的使用寿命F01015 内部软件错误A01016 (F) 固件被修改A01017 组件列表被更改A01020 写RAM 失败F01023 内部软件超时F01030 控制权下的生命符号出错F01031 “远程模式关”下的生命符号出错A01032 (F) ACX:需要存储所有参数F01033 单位转换:参考参数无效F01034 单位转换:参考值更改后参数值计算失败A01035 (F) ACX:参数备份文件损坏F01036 (A) ACX:缺少参数备份文件F01038 (A) ACX:载入参数备份文件失败F01039 (A) ACX:写入参数备份文件失败F01040 需要备份参数并重新上电F01040 需要备份参数并重新上电F01041 需要备份参数F01042 下载项目时的参数出错F01043 在项目下载时出现严重错误F01044 CU:描述数据出错A01045 CU:设计数据无效A01049 CU:无法写入文件F01050 存储卡和设备不兼容F01054 CU:超出系统极限F01055 CU:内部错误(应用和端口的SYNO 不相同)F01056 CU:内部错误(参数组时钟周期已经分配,但有偏差)F01057 CU:内部错误(从站的DRIVE-CLiQ 类型不同)F01058 CU:内部错误(拓扑结构中没有从站)F01059 CU:内部错误(端口不存在)F01060 CU:内部错误(参数组不存在)F01061 CU:内部错误(应用未知)F01063 CU:内部错误(PDM)A01064 (F) CU:内部错误(CRC)F01068 CU:数据存储器溢出A01069 参数备份文件和设备不兼容F01070 正在向存储卡进行项目/固件下载F01072 从备份文件中修复存储卡A01073 备份文件至存储卡上需要上电A01099 超出时间同步公差范围A01100 CU:存储卡已拔出F01105 (A) CU:存储器容量不足F01106 CU:存储器容量不足F01107 CU:保存到非易失性存储器的操作失败F01110 CU:一个控制单元上不止一个SINAMICS GF01111 CU:不允许驱动设备混合运行F01112 CU:功率单元非法F01120 (A) 初始化端口失败F01122 (A) 测量探头输入端的频率过高F01122 (A) 测量探头输入端的频率过高F01123 功率单元不支持数字输入/输出端F01150 CU:超过了某一驱动对象类型的实例数F01151 CU:超出了某一类别驱动对象的数量F01200 CU: 时间片管理内部软件错误F01205 CU:时间片溢出F01221 CU:基本周期太小F01222 CU:基本时钟周期太小(没有用于通讯的计算时间)A01223 CU:采样时间不一致A01224 CU:脉冲频率不一致F01250 CU:CU-EEPROM 只读数据出错A01251 CU:CU-EEPROM 读写数据出错F01255 CU:插件板EEPROM 只读数据出错A01256 CU:插件板EEPROM 读写数据出错F01303 DRIVE-CLiQ 部件不支持所要求的功能A01304 (F) DRIVE-CLiQ 组件的固件不是最新版本F01305 拓扑结构:缺少组件号A01306 正在升级DRIVE-CLiQ 组件的固件A01314 拓扑结构:不应存在该组件A01315 驱动对象不可以运行A01316 驱动对象无效且再次可以运行A01317 (N) 禁用的组件再次存在A01318 BICO: 存在断开的连接A01319 插入的组件没有初始化A01320 拓扑结构:配置中缺少驱动对象编号A01321 拓扑结构:配置中没有驱动对象编号A01322 拓扑结构:配置中驱动对象编号重复存在A01323 拓扑结构:编制了两个以上的子列表A01324 拓扑结构:驱动对象编号哑元创建错误F01325 拓扑结构:设定拓扑结构中不包含该组件号A01330 拓扑结构:无法快速调试A01331 拓扑结构:至少一个组件没有分配给驱动对象F01340 拓扑结构:一个支路上的组件过多F01341 拓扑结构:超出了DRIVE-CLiQ 组件的最大数量F01354 拓扑结构:实际拓扑结构存在错误的组件F01355 拓扑结构:实际拓扑结构已更改F01356 拓扑结构:存在损坏的DRIVE-CLiQ 组件F01357 拓扑结构:在DRIVE-CLiQ 支路上发现了两个控制单元A01358 拓扑结构:没有支路终端F01359 拓扑结构:DRIVE-CLiQ 性能不足F01360 拓扑结构:实际拓扑结构非法A01361 拓扑结构:实际拓扑结构包括SINUMERIK 和SIMOTION 组件A01362 拓扑结构:违反拓扑结构规定F01375 组件:两个组件之间实际拓扑结构连接重复F01380 拓扑结构:实际拓扑结构损坏的EEPROMA01381 拓扑结构:比较功率单元发现偏差A01382 拓扑结构:比较编码器模块发现偏差A01383 拓扑结构:端子模块比较发现偏差A01384 拓扑结构:比较DRIVE-CLiQ 集线器模块发现偏差A01385 拓扑结构:比较CX32 发现偏差A01386 拓扑结构:比较DRIVE-CLiQ 组件发现偏差A01387 拓扑结构:比较选件槽组件发现偏差A01388 拓扑结构:比较EnDat编码器发现偏差A01389 拓扑结构:比较带DRIVE-CLiQ 的电机发现偏差A01416 拓扑结构:实际拓扑结构中多出组件A01420 拓扑结构:比较单个组件发现偏差A01421 拓扑结构:比较多个组件发现偏差A01425 拓扑结构:比较组件序列号发现偏差A01428 拓扑结构:比较组件连接发现偏差A01429 拓扑结构:比较多个组件连接发现偏差F01451 设定拓扑结构无效F01470 拓扑结构:发现设定拓扑结构环形连接F01475 拓扑结构:两个组件之间设定拓扑结构连接重复A01481 拓扑结构:比较实际拓扑结构中缺少功率单元A01482 拓扑结构:比较实际拓扑结构中缺少编码器模块A01483 拓扑结构:比较实际拓扑结构中缺少端子模块A01484 拓扑结构:比较实际拓扑结构中缺少DRIVE-CLiQ 集线器模块A01485 拓扑结构:比较实际拓扑结构中缺少CX32A01486 拓扑结构:比较实际拓扑结构中缺少DRIVE-CLiQ 部件A01487 拓扑结构:比较实际拓扑结构中缺少“选件槽组件”A01488 拓扑结构:在实际拓扑结构中缺少EnDat编码器A01489 拓扑结构比较:实际拓扑结构中缺少带DRIVE-CLiQ 的电机F01505 (A) BICO:无法建立连接F01506 (A) BICO: 无标准报文A01507 (F, N) BICO:有至未激活对象的连接A01508 BICO:超出未激活对象的连接数F01510 BICO:信号源不是浮点F01511 (A) BICO:连接有不同定标F01512 BICO:没有定标F01513 (N, A) BICO:不同驱动对象之间的连接有不同定标A01514 (F) BICO:在重新连接期间写入时出错F01515 (A) BICO: 不允许写入参数,因为控制权有效A01590 (F) 驱动:电机维修间隔到期F01600 SI CU:STOP A 被触发F01611 (A) SI CU:某一监控通道故障F01612 SI CU: 并联功率单元上STO 输入不同N01620 (F, A) SI CU:Safe Torque Off激活N01621 (F, A) SI CU: Safe Stop 1 激活F01625 SI CU:安全数据中生命符号出错F01630 SI CU: 制动控制出错A01631 (F, N) SI CU:电机抱闸/SBC 配置无意义F01649 SI CU: 内部软件错误F01650 SI CU: 必须进行验收测试F01651 SI CU:安全时间片同步失败F01652 SI CU: 非法的监控周期F01653 SI CU: PROFIBUS/PROFINET 配置出错A01654 (F) SI CU: PROFIsafe 配置有差异F01655 SI CU:监控功能的对比F01656 SI CU:电机模块参数出错F01657 SI CU: PROFIsafe 报文号无效F01658 SI CU: PROFIsafe报文号不一致F01659 SI CU:参数的写入任务被绝F01659 SI CU:参数的写入任务被绝F01660 SI CU:不支持安全功能F01661 SI CU: 安全输入端模拟激活F01663 SI CU:SI 参数复制被拒绝F01664 SI CU:无自动固件升级F01665 SI CU: 系统故障A01666 (F) SI 运动CU:F-DI 上用于安全应答的静态1 信号A01669 (F, N) SI 运动:电机和功率单元的组合无效F01670 SI 运动:编码器模块参数设置无效F01671 SI 运动:编码器参数设置出错F01672 SI CU:电机模块软件/硬件不兼容F01673 SI 运动:编码器模块软件/硬件不兼容F01674 SI 运动CU:PROFIsafe 报文不支持安全功能F01680 SI 运动CU:安全监控校验和错误F01681 SI 运动CU:参数值误F01682 SI 运动CU:不支持监控功能F01683 SI运动CU:缺少SOS/SLS 使能F01684 SI 运动:Safely-Limited Position 极限值混淆F01685 SI 运动CU:Safely-Limited Speed 的极限值过大F01686 SI 运动:凸轮位置参数设置出错F01687 SI 运动:SCA (SN) 模数值设定出错F01688 SI运动CU:不允许实际值同步C01689 SI 运动:轴配置改变F01690 SI 运动: NVRAM 上的数据备份问题A01691 (F) SI 运动:Ti 和To 不适用于DP 周期F01692 SI运动CU:无编码器时参数值错误A01693 (F) SI CU:安全参数已修改,需要热启动/上电F01694 (A) SI 运动CU: 电机模块的固件版本低于控制单元A01695 (F) SI 运动:编码器模块被更换A01696 (F) SI 运动: 运动监控测试在启动中被选中A01697 (F) SI 运动: 需要运动监控测试A01698 (F) SI CU: 调试模式激活A01699 (F) SI CU: 断路路径测试C01700 SI 运动CU:STOP A 被触发C01701 SI 运动CU:STOP B 被触发C01706 SI 运动CU:超出SAM/SBR 极限C01707 SI 运动CU:超出Safe Operating Stop 公差C01708 SI 运动CU:STOP C 被触发C01709 SI 运动CU:STOP D 被触发C01710 SI 运动CU:STOP E 被触发C01711 SI 运动CU:某一监控通道故障C01712 SI 运动CU:F-IO 处理时出现故障C01714 SI 运动CU:超出Safely-Limited SpeedC01715 SI 运动CU:超出Safely-Limited PositionC01716 SI 运动CU:超出安全运动方向的公差C01730 SI 运动CU:动态安全限制转速的参考程序段无效C01745 SI 运动CU:检查制动测试时的制动转矩C01750 SI 运动CU:编码器硬件故障C01751 SI 运动CU:安全编码器有效性测试故障C01770 SI 运动CU:故障安全输入/输出的差异性错误A01772 SI 运动CU:故障安全输入/输出正在执行“强制故障检查”F01773 SI 运动CU:强制故障检查错误A01774 SI 运动CU :“强制故障检查”未执行A01780 SBT 选择时制动已闭合A01781 超出SBT 制动打开时间A01782 SBT 制动测试:控制错误A01783 超出SBT 制动闭合时间A01784 SBT 制动测试因故障终止A01785 SBT 制动测试配置错误F01786 SCC 信号被修改F01787 SBT 电机类型不同A01795 SI 运动CU: 退出安全脉冲删除状态后等待时间届满A01796 (F, N) SI CU: 等待通讯C01797 SI 运动CU:轴未安全回参考点C01798 SI 运动CU:正在进行“强制故障检查”C01799 SI 运动CU:处于验收测试模式F01800 DRIVE-CLiQ:硬件/配置出错A01839 DRIVE-CLiQ 诊断:组件电缆故障A01840 SMI: 检测出没有电机数据的组件A01900 (F) PB/PN: 配置报文出错A01902 错误的PB/PN 等时同步运行设置A01903 (F) COMM INT:接收配置数据无效F01910 (N, A) 现场总线设定值超时F01911 (N, A) PB/PN 等时同步周期故障F01912 (N, A) PB/PN 等时同步中生命符号出错F01913 (N, A) COMM INT:生命符号监控时间结束F01914 (N, A) COMM INT:配置监控时间结束F01915 (N, A) PB/PN 同步运行,驱动对象1 生命符号出错A01920 (F) PROFIBUS:循环连接中断A01921 (F) PROFIBUS: 在To 后接收设定值A01930 PB/PN 等时同步中电流环周期不相同A01931 PB/PN 等时同步中转速环周期不相同A01932 DSC中缺少PB/PN 等时同步A01940 未达到PB/PN 等时同步A01941 总线拓扑结构中缺少PB/PN 周期信号A01943 总线拓扑结构中PB/PN 周期信号受干扰A01944 未达到PB/PN 生命符号同步A01945 PROFIBUS:和发布方的连接故障F01946 (A) PROFIBUS:和发布方的连接中断F01950 (N, A) PB/PN 等时同步失败F01951 CU DRIVE-CLiQ: 缺少同步应用周期F01952 CU DRIVE-CLiQ: 不支持组件同步A01953 CU DRIVE-CLiQ: 同步未结束F01954 CU DRIVE-CLiQ: 同步未成功A01955 CU DRIVE-CLiQ: DO 同步未结束A01980 PN:循环连接中断A01981 PN: 超出最大控制器数量A01982 PROFINET: 缺少第二个控制器A01989 PROFINET:循环数据传输时内部错误A01990 (F) USS: PZD 配置出错A02000 函数发生器:无法启动A02005 函数发生器:驱动不存在A02006 函数发器:未指定用于接入的驱动A02007 函数发生器:驱动不是SERVO/VECTOR/DC_CTRL A02008 函数发生器:驱动被多次指定A02009 函数发生器:错误的运行方式A02010 函数发生器:驱动的转速设定值不为零A02011 函数发生器:驱动的转速实际值不为零A02015 函数发生器:缺少驱动使能A02016 函数发生器:正在励磁A02020 函数发生器:参数不可更改A02025 函数发生器:周期过短A02026 函数发生器:脉冲宽度过大A02030 函数发生器:物理地址等于零A02040 函数发生器:错误的偏移值A02041 函数发生器:错误的带宽值A02047 函数发生器:时间片周期无效A02050 跟踪:无法启动A02055 跟踪:记录时间过短A02056 跟踪:记录周期过短A02057 跟踪:时间片周期无效A02058 跟踪:循环跟踪的时间片周期无效A02059 跟踪:2 x 8 记录通道的时间片周期无效A02060 跟踪:缺少需要记录的信号A02061 跟踪:信号无效A02062 跟踪:触发器信号无效A02063 跟踪:数据类型无效A02070 跟踪:参数不可更改A02075 跟踪:预触发时间过长F02080 跟踪:参数设置由于单位转换被删除A02097 MTrace:无法激活多次跟踪A02098 MTrace:无法保存A02099 跟踪:控制单元的存储空间不足A02100 驱动:电流环计算时滞太短A02150 OA:应用程序无法载入F02151 (A) OA: 内部软件错误F02152 (A) OA: 存储器容量不够F03000 操作时的NVRAM 错误F03001 NVRAM 校验和出错F03500 (A) TM:初始化A03501 TM:采样时间被修改F03505 (N, A) CU:模拟输入端断线F03505 (N, A) TM:模拟输入端断线F03505 (N, A) 模拟输入端断线F03505 (N, A) TM:模拟输入端断线A03506 (F, N) 缺少24 V电源A03507 (F, N) 数字输出未设置A03507 (F, N) 数字输出未设置A03510 (F, N) CU:校准数据不合理A03510 (F, N) TM:校准数据不合理A03550 TM:转速设定值滤波固有频率>香农频率F03590 (N, A) TM:模块未就绪A05000 (N) 功率单元:逆变器散热器过热A05001 (N) 功率单元:绝缘层芯片过热A05001 (N) 功率单元:绝缘层芯片过热A05002 (N) 功率单元:进风过热A05003 (N) 功率单元:内部空间过热A05004 (N) 功率单元:整流器过热A05005 冷却单元:冷却剂体积流量太低A05006 (N) 功率单元:热模型过热N05007 (A) 功率单元:热模型过热(装机装柜型功率单元)F05050 并联电路:尽管脉冲禁止,仍然报告脉冲使能F05051 并联电路:缺少功率单元脉冲使能A05052 (F) 并联电路:电流不平衡错误A05053 (F) 并联电路:直流母线电压不平衡错误A05054 并联电路:禁用功率单元F05055 并联电路:功率单元代码号非法F05055 并联电路:功率单元代码号非法F05056 并联电路:功率单元EPROM版本不同F05057 并联电路:功率单元固件版本不同F05058 并联电路:VSM EEPROM 版本不同F05059 并联电路:VSM 固件版本不同F05060 并联电路:功率单元固件版本不兼容F05061 整流单元VSM 数量F05064 并联:脉冲同步错误F05118 (A) 超出预充电接触器同步监控时间F05119 (A) 超出分路接触器同步监控时间F06000 整流单元:预充电监控时间已结束F06010 整流单元:运行中缺少功率单元EP 24 VF06050 整流单元:不支持非调节模式F06052 整流单元:不支持滤波器温度检测F06100 整流单元:由于主电源欠电压断路A06105 (F) 整流单元:主电源欠压F06200 整流单元:一个或者多个主电源相位故障A06205 (F) 整流单元:至少在一个主电源相位出现电压暂降F06207 (N, A) 整流单元:输入电流不对称F06210 整流单元:总电流过高F06211 整流单元:总电流过高F06211 整流单元:总电流过高A06215 (F) 整流单元:总电流过高A06250 (F, N) 整流单元:输入滤波器的电容器至少在一个相位损坏A06260 整流单元:输入滤波器温度过高F06261 整流单元:输入滤波器温度持续过高F06262 整流单元:接通时输入滤波器内的温度开关打开F06300 整流单元:在接通时输入电压过高A06301 (F) 整流单元:主电源过电压F06310 (A) 整流单元:输入电压(p0210)参数设定错误F06310 (A) 输入电压(p0210)参数设定错误F06311 整流单元:输入电压(p0210)故障F06320 主站/从站:4 通道多路转换器控制无效F06321 主站/从站:6 通道多路换器控制无效A06350 (F) 整流单元:测得的输入频率过高A06351 (F) 整流单元:测得的输入频率过低A06400 整流单元:主电源数据检测被选择/生效A06401 整流单元:变压器数据检测模式/测试模式被选中/生效F06500 整流单元:无法和主电源同步A06502 (F, N) 整流单元:在变压器励磁中未和主电源同步F06503 整流单元:电网黑启动失败F06504 整流单元:孤岛电网同步失败A06601 (F) 整流单元:电流偏差测量中断A06602 (F) 整流单元:无法进行电流偏移测量F06700 (A) 整流单元:负载时接通电源接触器A06800 (F) 整流单元:达到最大的直流母线稳态电压A06810 (F) 整流单元:直流母线电压报警阈值A06849 (F, N) 整流单元:短路运行生效F06850 整流单元:短路时间过长F06851 整流单元:分布式整流单元的电源监控已触发F06855 整流单元:输入滤波器监控已响应A06860 整流单元:无法激活功能模块A06900 (F) 制动模块:故障(1 -> 0)A06901 制动模块:I2t 关机预警A06904 (N) 制动模块被内部禁用A06905 制动模块内部I2t 断路报警信息F06906 (A) 制动模块内部故障信息F06907 制动模块内部过热F06908 制动模块内部过热/断路F06909 制动模块内部Uce 故障A06921 (N) 制动电阻相位不对称F06922 制动电阻断相F07011 驱动:电机超温F07011 驱动:电机超温A07012 (N) 驱动:电机温度模型1/3 超温A07012 (N) 驱动:电机温度模型1 过热F07013 驱动:电机温度模型配置故障A07014 (N) 驱动:电机温度模型配置报警A07014 (N) 驱动:电机温度模型配置报警A07015 驱动:电机温度传感器的报警信息F07016 驱动:电机温度传感器的故障信息A07017 超出附加温度报警阈值F07018 超出附加温度故障阈值F07080 驱动:闭环控制参数出错F07082 宏文件:无法执行F07083 宏文件:找不到ACX 文件F07084 宏文件:未满足WaitUntil 的条件F07085 驱动:开环控制/闭环控制参数被更改F07086 单位转换: 由于参考值改变而超出参数极限F07087 驱动:在设定的脉冲频率下无法进行无编码器运行F07088 单位转换: 由于单位转换而超出参数极限A07089 单位转换:转换单位后不能激活功能块F07090 驱动:转矩上限小于下限F07100 驱动:采样时间不可复位F07110 驱动:采样时间和基本周期不匹配A07140 驱动:电流环采样时间和主轴不配套A07200 驱动:控制权发出ON 指令F07220 (N, A) 驱动:缺少“通过PLC控制”F07300 (A) 驱动:缺少电源接触器反馈信息F07311 电机旁路开关F07312 电源旁路开关F07320 驱动:自动重启中断F07320 驱动:自动重启中断A07321 驱动:自动重启激活A07329 (N) 驱动: kT 评定器, kT(iq) 特征曲线或电压补偿失效F07330 捕捉再启动:测得的搜索电流过小F07331 捕捉再启动: 不支持该功能A07350 (F) 驱动:测量头设为数字输出A07351 (F) 驱动:测量头设为数字输出A07354 驱动:无法进行齿槽转矩补偿A07400 (N) 驱动:最大直流母线电压控制器生效A07400 (N) 驱动:最大直流母线电压控制器生效A07401 (N) 驱动:最大直流母线电压控制器关闭A07402 (N) 驱动:最小直流母线电压控制器生效A07402 (N) 驱动:最小直流母线电压控制器生效F07403 (N, A) 驱动:达到直流母线电压阈值下限F07403 (N, A) 驱动:达到直流母线电压阈值下限F07404 驱动:达到直流母线电压阈值上限F07404 驱动:达到直流母线电压阈值上限F07405 (N, A) 驱动:低于动能缓冲下的最低转速F07406 (N, A) 驱动:超出动能缓冲状态下最大持续时间F07407 驱动:不允许Vdc 降低A07409 驱动:V/f控制电流限值控制器生效F07410 驱动:电流环输出受限F07410 驱动:电流环输出受限F07411 驱动:磁通控制器输出受限F07412 驱动:换向角出错(电机模型)F07413 驱动:换向角出错(磁极位置检测)F07414 (N, A) 驱动:编码器序列号改变N07415 (F) 驱动:正在传送换向角偏移A07416 驱动:磁通控制器配置F07417 驱动脉冲方式不合理(电机模型)F07419 驱动:电流设定值滤波器自适应配置不一致F07420 驱动:电流设定值滤波器固有频率>香农频率F07420 驱动:电流设定值滤波器固有频率>香农频率F07421 驱动:转速滤波器固有频率>香农频率F07422 驱动:参考模型固有频率>香农频率F07423 驱动:APC 滤波器固有频率>香农频率A07424 驱动:APC 的运行条件无效F07425 驱动:APC 转速极限监控时间超期F07426 (A) 工艺控制器实际值达到极限值A07428 (N) 工艺控制器参数设置错误F07429 驱动:无编码器时不支持DSCF07430 驱动:无法切换到转矩开环运行F07431 驱动:无法切换到无编码器运行F07432 驱动:电机无过压保护F07433 驱动:无法切换到带编码器运行,因为编码器没有解除驻留F07434 驱动:无法在脉冲使能时改变旋转方向F07435 (N) 驱动:无编码器的矢量控制,斜坡函数发生器设置错误F07439 驱动: 不支持该功能A07440 EPOS:急动时间达到了限值A07441 位置环:备份绝对值编码器调校的位置偏移F07442 (A) 位置环:多圈分辨率和模数范围不匹配F07443 (A) 位置环:参考点坐标超出允许范围F07446 (A) 负载变速箱:无法复位位置跟踪F07447 负载变速箱:位置跟踪超出最大实际值F07448 (A) 负载变速箱:位置跟踪线性轴超出最大范围F07449 (A) 负载变速箱:位置跟踪当前位置在公差范围之外F07450 (A) 位置环: 静态监控已响应F07451 (A) 位置环: 定位监控已响应F07452 (A) 位置环:跟随误差过大F07453 位置环:位置实际值处理出错A07454 位置环:位置实际值处理没有有效的编码器A07455 EPOS:最大速度受限A07456 EPOS:设定速度受到限制A07457 EPOS:输入信号组合错误F07458 EPOS:未找到参考点凸轮F07459 EPOS:不存在零脉冲F07460 EPOS:未找到参考点凸轮结束点A07461 EPOS:未设置参考点A07462 EPOS:所选运行程序段编号不存在A07463 (F) EPOS:在运行程序段中不要求进行外部程序段切换F07464 EPOS:运行程序段不一致A07465 EPOS:运行程序段没有后续程序段A07466 EPOS:多次配运行程序段编号A07467 EPOS:运行程序段包含错误的任务参数A07468 EPOS:运行程序段跳转目标不存在A07469 EPOS:运行程序段目标位置< 负软件限位开关A07470 EPOS:运行程序段目标位置> 正软件限位开关A07471 EPOS:运行程序段目标位置在模数范围之外A07472 EPOS: 运行程序段ABS_POS/ABS_NEG 不可能A07473 (F) EPOS:到达运行范围起始处A07474 (F) EPOS:到达运行范围结束处F07475 (A) EPOS:目标位置< 运行范围起始处F07476 (A) EPOS:目标位置> 运行范围结束处A07477 (F) EPOS:目标位置< 负软件限位开关A07478 (F) EPOS:目标位置> 正软件限位开关A07479 EPOS:逼近负软件限位开关A07480 EPOS:逼近正软件限位开关F07481 (A) EPOS:轴位置< 负软件限位开关F07482 (A) EPOS:轴位置> 正软件限位开关A07483 EPOS:运行到固定挡块,未达到夹紧转矩F07484 EPOS:固定挡块在监控窗口之外F07485 (A) EPOS:未到达固定挡块A07486 EPOS: 中间停缺失A07487 EPOS:缺少运行任务取消F07488 EPOS:无法相对定位A07489 EPOS:参考点补偿在窗口之外F07490 (N) EPOS:运行时取消使能F07491 (A) EPOS:到达负停止凸轮F07492 (A) EPOS:到达正停止凸轮F07493 位置环:位置实际值的值范围溢出F07494 位置环:在运行时切换驱动数据组A07495 (F) 位置环:参考功能中断A07496 EPOS:无法使能A07497 位置环:位置设置值已激活A07498 (F) 位置环:无法进行测量头分析F07499 (A) EPOS:沿错误方向到达反向凸轮F07500 驱动:未定义功率单元数据组PDSF07501 驱动:未定义电机数据组MDSF07502 驱动:未定义编码器数据组EDSF07503 EPOS:沿错误运行方向逼近停止凸轮A07504 驱动:电机数据组没有分配到驱动数据组A07505 EPOS: 在V/f/SLVC 控制中无法执行固定挡块任务F07509 驱动:缺少组件号F07510 驱动:驱动数据组中有相同的编码器F07511 驱动:编码器多次使用F07512 驱动:无法设定编码器数据组转换参数A07514 (N) 驱动:数据结构和接口模式不相符F07515 驱动:功率单元和电机连接错误F07516 驱动:重新调试数据组F07517 驱动:编码器数据组转换参数设置错误F07518 驱动:电机数据组转换参数设置错误A07519 驱动:电机切换的参数设定错误A07520 驱动:无法执行电机切换A07530 驱动:驱动数据组DDS 不存在A07531 驱动:指令数据组CDS 不存在A07541 驱动:无法进行数据组转换A07550 (F, N) 驱动:无法复位编码器参数F07551 驱动编码器:没有换向角信息F07552 (A) 驱动编码器:不支持编码器配置F07553 (A) 驱动编码器:不支持编码器模块配置F07555 (A) 驱动编码器:位置跟踪配置F07556 测量变速箱:位置跟踪超出最大实际值A07557 (F) 编码器1:参考点坐标超出允许范围A07558 (F) 编码器2:参考点坐标超出允许范围A07559 (F) 编码器3:参考点坐标超出允许范围F07560 驱动编码器:线数不是二的幂次方F07561 驱动编码器:多圈线数不是二的幂次方F07562 (A) 驱动编码器:增量编码器无法进行位置跟踪F07563 (A) 驱动编码器:XIST1_ERW 配置错误A07565 (F, N) 驱动:在PROFIdrive 编码器接口1 上的编码器错误A07566 (F, N) 驱动:在PROFIdrive 编码器接口2 上的编码器错误A07567 (F, N) 驱动:在PROFIdrive 编码器接口3 上的编码器错误A07569 (F) 编码器无法被检测F07575 驱动:电机编码器未就绪A07576 驱动:由于故障无编码器运行生效A07577 (F) 编码器1:无法进行测量头分析A07578 (F) 编码器2:无法进行测量头分析A07579 (F) 编码器3:无法进行测量头分析A07580 (F, N) 驱动:编码器模块的组件号错误A07581 (F) 编码器1:位置实际值处理出错A07582 (F) 编码器2:位置实际值处理出错A07583 (F) 编码器3:位置实际值处理出错A07584 编码器1:位置设置值已激活A07585 编码器2:位置设置值已激活A07586 编码器3:位置设置值已激活A07587 编码器1: 位置实际值处理没有有效的编码器A07588 编码器2: 位置实际值处理没有有效的编码器A07589 编码器3: 位置实际值处理没有有效的编码器A07590 (F) 编码器1:在运行时切换驱动数据组A07591 (F) 编码器2:在运行时切换驱动数据组A07592 (F) 编码器3:在运行时切换驱动数据组A07593 (F, N) 编码器1:超出位置实际值的值域A07594 (F, N) 编码器2:超出位置实际值的值域A07595 (F, N) 编码器3:超出位置实际值的值域A07596 (F) 编码器1:参考功能中断A07597 (F) 编码器2:参考功能中断A07598 (F) 编码器3:参考功能中断F07599 (A) 编码器1:无法校准F07600 (A) 编码器2:无法校准F07601 (A) 编码器3:无法校准F07800 驱动:没有功率单元F07801 驱动:电机过电流F07801 驱动:电机过电流F07802 驱动:整流单元或者功率单元未就绪A07805 (N) 整流单元:功率单元过载I2tA07805 (N) 驱动:功率单元过载I2tF07807 驱动:检测出短路/接地F07808 (A) HF 阻尼器:阻尼未就绪F07810 驱动:功率单元EEPROM 无额定数据F07815 驱动:功率单元已修改F07815 驱动:功率单元已修改F07815 驱动:功率单元已修改A07820 驱动:未连接温度传感器A07825 (N) 驱动:模拟运行已激活F07826 驱动:模拟运行的直流母线电压过高F07840 驱动:缺少整流单元运行F07841 (A) 驱动:取消整流单元运行A07850 (F) 外部报警1A07851 (F) 外部报警2A07852 (F) 外部报警3F07860 (A) 外部故障1F07861 (A) 外部故障2F07862 (A) 外部故障3。
博途FB284的应用及S120使用111报文实现电机位置定位

伺服电机通过111报文进行位置定位目录目的: (2)一、硬件配置 (2)二、定位模式的手动调试: (3)三、使用FB284调试 (6)1、 相对定位 (7)2、 绝对定位 (9)3、 连续运行模式(以设定速度带位置环连续运行) (10)4、 主动回零点 (11)5、 直接设置零点 (11)四、使用111报文直接控制电机(或自由通信报文) (12)1、相对定位和绝对定位的控制字: (15)1、 绝对定位的控制字(见前节<相对定位和绝对定位>已述) (17)2、 连续运行的控制字 (17)4、主动回零的控制字 (19)5、直接设定零点(参考点)的控制字 (19)五、过程中容易出现的问题: (21)问题1: (21)问题2: (21)问题4: (22)重点问题: (24)伺服电机通过111报文进行位置定位目的:通过SCOUT进行定位使用FB284库函数定位的方式,控制电机的位置。
使用111报文进行电机定位。
一、硬件配置Scout配置轴的报文时,需要配置为111报文才能使用FB284功能库。
要选中111报文,在配置轴的时候必须勾选Basic positioner。
PLC的配置详见后文。
二、定位模式的手动调试:配置好后,在控制面板可对轴进行手动调试:是jog和setup mode调试,可在上图JOG的下拉菜单中选择,选择JOG时,必须按住才能运转,一松开则电机按设定的减速度停止。
选择setup mode时,直接按start就可以按设定的速度一直运行。
选择上图下拉菜单,n setpoint specification是速度模式,设定值是**转/分。
而若选择Basic positioner,那设置值的单位是LU(Load的定位长度单位),我们在SCOUT里的position control下的Mechanics里,LU Per load revolution可以配置的最大值不能超过Encoder PPR值*Fine resolution的值,即在下面右图中是512*2048=1048576,设置的值越大,在相同的定位电机速度V例如600个1000LU的设定下,轴和负载的转速越慢,又因为这里Load:Motor=1:1,负载和轴的转速都相当于60*1000/1048576=0.0009536转/分)。
西门子S120变频器使用方法交流(内部工程师培训)
并在下一选项中选择哪一编码器做定位控制用。
之后是对机械结构做的一些设定,如无特殊应用可保持不变。 之后定义通讯报文长度,此选项内容受选择功能方式的选项影响
此次应用为111报文,具体报文定义可参看111报文说明文档。 完成配置后会出现一个显示总览信息的窗口,直接点击完成即可。
配置完成后会看到在驱动器选项下有一个配置完成的Drive_1项 目,本例为CU320控制器能实现对多个驱动器的控制,因此再添 加几个驱动器,方法基本如上述过程,但有一些注意事项。
然后进行电机配置,由于是伺服控制,并选用西门子自己的电机, 故选择带DRIVE-CLiQ接口的电机。
如是其它电机则选择相应的电机型号,然后对报闸控制 进行设定。
下一步对编码 器进行设定。
1为西门子伺服电机自带编码器,带drive-CliQ通讯口,上面配置电 机时已设定,故系统自认定,选项灰色不可改变。2为自定义编码 器,如有需要可勾选,并在3处定义编码器具体型号。
之后如配置其他传动装置一样添加S120到dp网络中
在通讯报文配置中添加111报文和352报文,此顺 序应与图2所示装置排序一致,既drive_1对应地址 256,drive_2对应地址280,因控制器在starter中为 自由连接报文,故step7中可不做定义。配置完成 后通讯读写按以前其他传动读写程序即可。
有时插入CF卡后RDY等会黄色闪烁,可先在线,然后选择控制器 ,再点击恢复工厂设定,可清除CF卡中原有文件并恢复到出厂设 定值。
此时黄色闪烁如还不能变绿色,可断 一次控制电源,再送电问题即可解决。
在下载过程中有时会报无法下载,或 无法将参数存入rom,或装置无法切换 到准备好状态等问题,以上问题多数 由于项目配置时一些参数设定的不合 理所引起,请重新检查项目中的设定 值,改正完成后再次下载。
S120故障和报警代码
故障和报警列表F01000 内部软件错误F01001 浮点例外F01002 内部软件错误F01003 访问存储器时出现应答延迟N01004 (F, A) 内部软件错误F01005 下载 DRIVE-CLiQ 组件的固件失败A01006 DRIVE-CLiQ 组件的固件需要升级A01007 DRIVE-CLiQ 组件需要重新上电A01009 (N) CU: 控制单元过热F01010 驱动类型不明F01011 (N) 下载中断F01012 (N) 项目转化出错A01013 控制单元:达到或超过风扇的使用寿命F01015 内部软件错误A01016 (F) 固件被修改A01017 组件列表被更改A01020 写 RAM 失败F01023 内部软件超时F01030 控制权下的生命符号出错F01031 “远程模式关”下的生命符号出错A01032 (F) ACX:需要存储所有参数F01033 单位转换:参考参数无效F01034 单位转换:参考值更改后参数值计算失败A01035 (F) ACX:参数备份文件损坏F01036 (A) ACX:缺少参数备份文件F01038 (A) ACX:载入参数备份文件失败F01039 (A) ACX:写入参数备份文件失败F01040 需要备份参数并重新上电F01040 需要备份参数并重新上电F01041 需要备份参数F01042 下载项目时的参数出错F01043 在项目下载时出现严重错误F01044 CU:描述数据出错A01045 CU:设计数据无效A01049 CU:无法写入文件F01050 存储卡和设备不兼容F01054 CU:超出系统极限F01055 CU:内部错误(应用和端口的 SYNO 不相同)F01056 CU:内部错误(参数组时钟周期已经分配,但有偏差)F01057 CU:内部错误(从站的 DRIVE-CLiQ 类型不同)F01058 CU:内部错误(拓扑结构中没有从站)F01059 CU:内部错误(端口不存在)F01060 CU:内部错误(参数组不存在)F01061 CU:内部错误(应用未知)F01063 CU:内部错误(PDM)A01064 (F) CU:内部错误(CRC)F01068 CU:数据存储器溢出A01069 参数备份文件和设备不兼容F01070 正在向存储卡进行项目/固件下载F01072 从备份文件中修复存储卡A01073 备份文件至存储卡上需要上电A01099 超出时间同步公差范围A01100 CU:存储卡已拔出F01105 (A) CU:存储器容量不足F01106 CU:存储器容量不足F01107 CU:保存到非易失性存储器的操作失败F01110 CU:一个控制单元上不止一个 SINAMICS GF01111 CU:不允许驱动设备混合运行F01112 CU:功率单元非法F01120 (A) 初始化端口失败F01122 (A) 测量探头输入端的频率过高F01122 (A) 测量探头输入端的频率过高F01123 功率单元不支持数字输入/输出端F01150 CU:超过了某一驱动对象类型的实例数F01151 CU:超出了某一类别驱动对象的数量F01200 CU: 时间片管理内部软件错误F01205 CU:时间片溢出F01221 CU:基本周期太小F01222 CU:基本时钟周期太小(没有用于通讯的计算时间)A01223 CU:采样时间不一致A01224 CU:脉冲频率不一致F01250 CU:CU-EEPROM 只读数据出错A01251 CU:CU-EEPROM 读写数据出错F01255 CU:插件板 EEPROM 只读数据出错A01256 CU:插件板 EEPROM 读写数据出错F01303 DRIVE-CLiQ 部件不支持所要求的功能A01304 (F) DRIVE-CLiQ 组件的固件不是最新版本F01305 拓扑结构:缺少组件号A01306 正在升级 DRIVE-CLiQ 组件的固件A01314 拓扑结构:不应存在该组件A01315 驱动对象不可以运行A01316 驱动对象无效且再次可以运行A01317 (N) 禁用的组件再次存在A01318 BICO: 存在断开的连接A01319 插入的组件没有初始化A01320 拓扑结构:配置中缺少驱动对象编号A01321 拓扑结构:配置中没有驱动对象编号A01322 拓扑结构:配置中驱动对象编号重复存在A01323 拓扑结构:编制了两个以上的子列表A01324 拓扑结构:驱动对象编号哑元创建错误F01325 拓扑结构:设定拓扑结构中不包含该组件号A01330 拓扑结构:无法快速调试A01331 拓扑结构:至少一个组件没有分配给驱动对象F01340 拓扑结构:一个支路上的组件过多F01341 拓扑结构:超出了 DRIVE-CLiQ 组件的最大数量F01354 拓扑结构:实际拓扑结构存在错误的组件F01355 拓扑结构:实际拓扑结构已更改F01356 拓扑结构:存在损坏的 DRIVE-CLiQ 组件F01357 拓扑结构:在 DRIVE-CLiQ 支路上发现了两个控制单元A01358 拓扑结构:没有支路终端F01359 拓扑结构:DRIVE-CLiQ 性能不足F01360 拓扑结构:实际拓扑结构非法A01361 拓扑结构:实际拓扑结构包括 SINUMERIK 和 SIMOTION 组件A01362 拓扑结构:违反拓扑结构规定F01375 组件:两个组件之间实际拓扑结构连接重复F01380 拓扑结构:实际拓扑结构损坏的 EEPROMA01381 拓扑结构:比较功率单元发现偏差A01382 拓扑结构:比较编码器模块发现偏差A01383 拓扑结构:端子模块比较发现偏差A01384 拓扑结构:比较 DRIVE-CLiQ 集线器模块发现偏差A01385 拓扑结构:比较 CX32 发现偏差A01386 拓扑结构:比较 DRIVE-CLiQ 组件发现偏差A01387 拓扑结构:比较选件槽组件发现偏差A01388 拓扑结构:比较EnDat编码器发现偏差A01389 拓扑结构:比较带 DRIVE-CLiQ 的电机发现偏差A01416 拓扑结构:实际拓扑结构中多出组件A01420 拓扑结构:比较单个组件发现偏差A01421 拓扑结构:比较多个组件发现偏差A01425 拓扑结构:比较组件序列号发现偏差A01428 拓扑结构:比较组件连接发现偏差A01429 拓扑结构:比较多个组件连接发现偏差F01451 设定拓扑结构无效F01470 拓扑结构:发现设定拓扑结构环形连接F01475 拓扑结构:两个组件之间设定拓扑结构连接重复A01481 拓扑结构:比较实际拓扑结构中缺少功率单元A01482 拓扑结构:比较实际拓扑结构中缺少编码器模块A01483 拓扑结构:比较实际拓扑结构中缺少端子模块A01484 拓扑结构:比较实际拓扑结构中缺少 DRIVE-CLiQ 集线器模块A01485 拓扑结构:比较实际拓扑结构中缺少 CX32A01486 拓扑结构:比较实际拓扑结构中缺少 DRIVE-CLiQ 部件A01487 拓扑结构:比较实际拓扑结构中缺少“选件槽组件”A01488 拓扑结构:在实际拓扑结构中缺少EnDat编码器A01489 拓扑结构比较:实际拓扑结构中缺少带 DRIVE-CLiQ 的电机F01505 (A) BICO:无法建立连接F01506 (A) BICO: 无标准报文A01507 (F, N) BICO:有至未激活对象的连接A01508 BICO:超出未激活对象的连接数F01510 BICO:信号源不是浮点F01511 (A) BICO:连接有不同定标F01512 BICO:没有定标F01513 (N, A) BICO:不同驱动对象之间的连接有不同定标A01514 (F) BICO:在重新连接期间写入时出错F01515 (A) BICO: 不允许写入参数,因为控制权有效A01590 (F) 驱动:电机维修间隔到期F01600 SI CU:STOP A 被触发F01611 (A) SI CU:某一监控通道故障F01612 SI CU: 并联功率单元上 STO 输入不同N01620 (F, A) SI CU:Safe Torque Off激活N01621 (F, A) SI CU: Safe Stop 1 激活F01625 SI CU:安全数据中生命符号出错F01630 SI CU: 制动控制出错A01631 (F, N) SI CU:电机抱闸/SBC 配置无意义F01649 SI CU: 内部软件错误F01650 SI CU: 必须进行验收测试F01651 SI CU:安全时间片同步失败F01652 SI CU: 非法的监控周期F01653 SI CU: PROFIBUS/PROFINET 配置出错A01654 (F) SI CU: PROFIsafe 配置有差异F01655 SI CU:监控功能的对比F01656 SI CU:电机模块参数出错F01657 SI CU: PROFIsafe 报文号无效F01658 SI CU: PROFIsafe报文号不一致F01659 SI CU:参数的写入任务被绝F01659 SI CU:参数的写入任务被绝F01660 SI CU:不支持安全功能F01661 SI CU: 安全输入端模拟激活F01663 SI CU:SI 参数复制被拒绝F01664 SI CU:无自动固件升级F01665 SI CU: 系统故障A01666 (F) SI 运动 CU:F-DI 上用于安全应答的静态 1 信号A01669 (F, N) SI 运动:电机和功率单元的组合无效F01670 SI 运动:编码器模块参数设置无效F01671 SI 运动:编码器参数设置出错F01672 SI CU:电机模块软件/硬件不兼容F01673 SI 运动:编码器模块软件/硬件不兼容F01674 SI 运动 CU:PROFIsafe 报文不支持安全功能F01680 SI 运动 CU:安全监控校验和错误F01681 SI 运动 CU:参数值误F01682 SI 运动 CU:不支持监控功能F01683 SI运动 CU:缺少 SOS/SLS 使能F01684 SI 运动:Safely-Limited Position 极限值混淆F01685 SI 运动 CU:Safely-Limited Speed 的极限值过大F01686 SI 运动:凸轮位置参数设置出错F01687 SI 运动:SCA (SN) 模数值设定出错F01688 SI运动CU:不允许实际值同步C01689 SI 运动:轴配置改变F01690 SI 运动: NVRAM 上的数据备份问题A01691 (F) SI 运动:Ti 和 To 不适用于 DP 周期F01692 SI运动CU:无编码器时参数值错误A01693 (F) SI CU:安全参数已修改,需要热启动/上电F01694 (A) SI 运动 CU: 电机模块的固件版本低于控制单元A01695 (F) SI 运动:编码器模块被更换A01696 (F) SI 运动: 运动监控测试在启动中被选中A01697 (F) SI 运动: 需要运动监控测试A01698 (F) SI CU: 调试模式激活A01699 (F) SI CU: 断路路径测试C01700 SI 运动 CU:STOP A 被触发C01701 SI 运动 CU:STOP B 被触发C01706 SI 运动 CU:超出 SAM/SBR 极限C01707 SI 运动 CU:超出 Safe Operating Stop 公差C01708 SI 运动 CU:STOP C 被触发C01709 SI 运动 CU:STOP D 被触发C01710 SI 运动 CU:STOP E 被触发C01711 SI 运动 CU:某一监控通道故障C01712 SI 运动CU:F-IO 处理时出现故障C01714 SI 运动 CU:超出 Safely-Limited SpeedC01715 SI 运动 CU:超出 Safely-Limited PositionC01716 SI 运动 CU:超出安全运动方向的公差C01730 SI 运动 CU:动态安全限制转速的参考程序段无效C01745 SI 运动 CU:检查制动测试时的制动转矩C01750 SI 运动 CU:编码器硬件故障C01751 SI 运动 CU:安全编码器有效性测试故障C01770 SI 运动 CU:故障安全输入/输出的差异性错误A01772 SI 运动 CU:故障安全输入/输出正在执行“强制故障检查”F01773 SI 运动 CU:强制故障检查错误A01774 SI 运动 CU :“强制故障检查”未执行A01780 SBT 选择时制动已闭合A01781 超出 SBT 制动打开时间A01782 SBT 制动测试:控制错误A01783 超出 SBT 制动闭合时间A01784 SBT 制动测试因故障终止A01785 SBT 制动测试配置错误F01786 SCC 信号被修改F01787 SBT 电机类型不同A01795 SI 运动 CU: 退出安全脉冲删除状态后等待时间届满A01796 (F, N) SI CU: 等待通讯C01797 SI 运动 CU:轴未安全回参考点C01798 SI 运动 CU:正在进行“强制故障检查”C01799 SI 运动 CU:处于验收测试模式F01800 DRIVE-CLiQ:硬件/配置出错A01839 DRIVE-CLiQ 诊断:组件电缆故障A01840 SMI: 检测出没有电机数据的组件A01900 (F) PB/PN: 配置报文出错A01902 错误的 PB/PN 等时同步运行设置A01903 (F) COMM INT:接收配置数据无效F01910 (N, A) 现场总线设定值超时F01911 (N, A) PB/PN 等时同步周期故障F01912 (N, A) PB/PN 等时同步中生命符号出错F01913 (N, A) COMM INT:生命符号监控时间结束F01914 (N, A) COMM INT:配置监控时间结束F01915 (N, A) PB/PN 同步运行,驱动对象 1 生命符号出错A01920 (F) PROFIBUS:循环连接中断A01921 (F) PROFIBUS: 在 To 后接收设定值A01930 PB/PN 等时同步中电流环周期不相同A01931 PB/PN 等时同步中转速环周期不相同A01932 DSC中缺少 PB/PN 等时同步A01940 未达到 PB/PN 等时同步A01941 总线拓扑结构中缺少 PB/PN 周期信号A01943 总线拓扑结构中 PB/PN 周期信号受干扰A01944 未达到 PB/PN 生命符号同步A01945 PROFIBUS:和发布方的连接故障F01946 (A) PROFIBUS:和发布方的连接中断F01950 (N, A) PB/PN 等时同步失败F01951 CU DRIVE-CLiQ: 缺少同步应用周期F01952 CU DRIVE-CLiQ: 不支持组件同步A01953 CU DRIVE-CLiQ: 同步未结束F01954 CU DRIVE-CLiQ: 同步未成功A01955 CU DRIVE-CLiQ: DO 同步未结束A01980 PN:循环连接中断A01981 PN: 超出最大控制器数量A01982 PROFINET: 缺少第二个控制器A01989 PROFINET:循环数据传输时内部错误A01990 (F) USS: PZD 配置出错A02000 函数发生器:无法启动A02005 函数发生器:驱动不存在A02006 函数发器:未指定用于接入的驱动A02007 函数发生器:驱动不是 SERVO/VECTOR/DC_CTRL A02008 函数发生器:驱动被多次指定A02009 函数发生器:错误的运行方式A02010 函数发生器:驱动的转速设定值不为零A02011 函数发生器:驱动的转速实际值不为零A02015 函数发生器:缺少驱动使能A02016 函数发生器:正在励磁A02020 函数发生器:参数不可更改A02025 函数发生器:周期过短A02026 函数发生器:脉冲宽度过大A02030 函数发生器:物理地址等于零A02040 函数发生器:错误的偏移值A02041 函数发生器:错误的带宽值A02047 函数发生器:时间片周期无效A02050 跟踪:无法启动A02055 跟踪:记录时间过短A02056 跟踪:记录周期过短A02057 跟踪:时间片周期无效A02058 跟踪:循环跟踪的时间片周期无效A02059 跟踪:2 x 8 记录通道的时间片周期无效A02060 跟踪:缺少需要记录的信号A02061 跟踪:信号无效A02062 跟踪:触发器信号无效A02063 跟踪:数据类型无效A02070 跟踪:参数不可更改A02075 跟踪:预触发时间过长F02080 跟踪:参数设置由于单位转换被删除A02097 MTrace:无法激活多次跟踪A02098 MTrace:无法保存A02099 跟踪:控制单元的存储空间不足A02100 驱动:电流环计算时滞太短A02150 OA:应用程序无法载入F02151 (A) OA: 内部软件错误F02152 (A) OA: 存储器容量不够F03000 操作时的 NVRAM 错误F03001 NVRAM 校验和出错F03500 (A) TM:初始化A03501 TM:采样时间被修改F03505 (N, A) CU:模拟输入端断线F03505 (N, A) TM:模拟输入端断线F03505 (N, A) 模拟输入端断线F03505 (N, A) TM:模拟输入端断线A03506 (F, N) 缺少 24 V电源A03507 (F, N) 数字输出未设置A03507 (F, N) 数字输出未设置A03510 (F, N) CU:校准数据不合理A03510 (F, N) TM:校准数据不合理A03550 TM:转速设定值滤波固有频率>香农频率F03590 (N, A) TM:模块未就绪A05000 (N) 功率单元:逆变器散热器过热A05001 (N) 功率单元:绝缘层芯片过热A05001 (N) 功率单元:绝缘层芯片过热A05002 (N) 功率单元:进风过热A05003 (N) 功率单元:内部空间过热A05004 (N) 功率单元:整流器过热A05005 冷却单元:冷却剂体积流量太低A05006 (N) 功率单元:热模型过热N05007 (A) 功率单元:热模型过热(装机装柜型功率单元)F05050 并联电路:尽管脉冲禁止,仍然报告脉冲使能F05051 并联电路:缺少功率单元脉冲使能A05052 (F) 并联电路:电流不平衡错误A05053 (F) 并联电路:直流母线电压不平衡错误A05054 并联电路:禁用功率单元F05055 并联电路:功率单元代码号非法F05055 并联电路:功率单元代码号非法F05056 并联电路:功率单元EPROM版本不同F05057 并联电路:功率单元固件版本不同F05058 并联电路:VSM EEPROM 版本不同F05059 并联电路:VSM 固件版本不同F05060 并联电路:功率单元固件版本不兼容F05061 整流单元 VSM 数量F05064 并联:脉冲同步错误F05118 (A) 超出预充电接触器同步监控时间F05119 (A) 超出分路接触器同步监控时间F06000 整流单元:预充电监控时间已结束F06010 整流单元:运行中缺少功率单元 EP 24 VF06050 整流单元:不支持非调节模式F06052 整流单元:不支持滤波器温度检测F06100 整流单元:由于主电源欠电压断路A06105 (F) 整流单元:主电源欠压F06200 整流单元:一个或者多个主电源相位故障A06205 (F) 整流单元:至少在一个主电源相位出现电压暂降F06207 (N, A) 整流单元:输入电流不对称F06210 整流单元:总电流过高F06211 整流单元:总电流过高F06211 整流单元:总电流过高A06215 (F) 整流单元:总电流过高A06250 (F, N) 整流单元:输入滤波器的电容器至少在一个相位损坏A06260 整流单元:输入滤波器温度过高F06261 整流单元:输入滤波器温度持续过高F06262 整流单元:接通时输入滤波器内的温度开关打开F06300 整流单元:在接通时输入电压过高A06301 (F) 整流单元:主电源过电压F06310 (A) 整流单元:输入电压(p0210)参数设定错误F06310 (A) 输入电压(p0210)参数设定错误F06311 整流单元:输入电压(p0210)故障F06320 主站/从站:4 通道多路转换器控制无效F06321 主站/从站:6 通道多路换器控制无效A06350 (F) 整流单元:测得的输入频率过高A06351 (F) 整流单元:测得的输入频率过低A06400 整流单元:主电源数据检测被选择/生效A06401 整流单元:变压器数据检测模式/测试模式被选中/生效F06500 整流单元:无法和主电源同步A06502 (F, N) 整流单元:在变压器励磁中未和主电源同步F06503 整流单元:电网黑启动失败F06504 整流单元:孤岛电网同步失败A06601 (F) 整流单元:电流偏差测量中断A06602 (F) 整流单元:无法进行电流偏移测量F06700 (A) 整流单元:负载时接通电源接触器A06800 (F) 整流单元:达到最大的直流母线稳态电压A06810 (F) 整流单元:直流母线电压报警阈值A06849 (F, N) 整流单元:短路运行生效F06850 整流单元:短路时间过长F06851 整流单元:分布式整流单元的电源监控已触发F06855 整流单元:输入滤波器监控已响应A06860 整流单元:无法激活功能模块A06900 (F) 制动模块:故障(1 -> 0)A06901 制动模块:I2t 关机预警A06904 (N) 制动模块被内部禁用A06905 制动模块内部 I2t 断路报警信息F06906 (A) 制动模块内部故障信息F06907 制动模块内部过热F06908 制动模块内部过热/断路F06909 制动模块内部 Uce 故障A06921 (N) 制动电阻相位不对称F06922 制动电阻断相F07011 驱动:电机超温F07011 驱动:电机超温A07012 (N) 驱动:电机温度模型 1/3 超温A07012 (N) 驱动:电机温度模型 1 过热F07013 驱动:电机温度模型配置故障A07014 (N) 驱动:电机温度模型配置报警A07014 (N) 驱动:电机温度模型配置报警A07015 驱动:电机温度传感器的报警信息F07016 驱动:电机温度传感器的故障信息A07017 超出附加温度报警阈值F07018 超出附加温度故障阈值F07080 驱动:闭环控制参数出错F07082 宏文件:无法执行F07083 宏文件:找不到 ACX 文件F07084 宏文件:未满足 WaitUntil 的条件F07085 驱动:开环控制/闭环控制参数被更改F07086 单位转换: 由于参考值改变而超出参数极限F07087 驱动:在设定的脉冲频率下无法进行无编码器运行F07088 单位转换: 由于单位转换而超出参数极限A07089 单位转换:转换单位后不能激活功能块F07090 驱动:转矩上限小于下限F07100 驱动:采样时间不可复位F07110 驱动:采样时间和基本周期不匹配A07140 驱动:电流环采样时间和主轴不配套A07200 驱动:控制权发出 ON 指令F07220 (N, A) 驱动:缺少“通过PLC控制”F07300 (A) 驱动:缺少电源接触器反馈信息F07311 电机旁路开关F07312 电源旁路开关F07320 驱动:自动重启中断F07320 驱动:自动重启中断A07321 驱动:自动重启激活A07329 (N) 驱动: kT 评定器, kT(iq) 特征曲线或电压补偿失效F07330 捕捉再启动:测得的搜索电流过小F07331 捕捉再启动: 不支持该功能A07350 (F) 驱动:测量头设为数字输出A07351 (F) 驱动:测量头设为数字输出A07354 驱动:无法进行齿槽转矩补偿A07400 (N) 驱动:最大直流母线电压控制器生效A07400 (N) 驱动:最大直流母线电压控制器生效A07401 (N) 驱动:最大直流母线电压控制器关闭A07402 (N) 驱动:最小直流母线电压控制器生效A07402 (N) 驱动:最小直流母线电压控制器生效F07403 (N, A) 驱动:达到直流母线电压阈值下限F07403 (N, A) 驱动:达到直流母线电压阈值下限F07404 驱动:达到直流母线电压阈值上限F07404 驱动:达到直流母线电压阈值上限F07405 (N, A) 驱动:低于动能缓冲下的最低转速F07406 (N, A) 驱动:超出动能缓冲状态下最大持续时间F07407 驱动:不允许 Vdc 降低A07409 驱动:V/f控制电流限值控制器生效F07410 驱动:电流环输出受限F07410 驱动:电流环输出受限F07411 驱动:磁通控制器输出受限F07412 驱动:换向角出错(电机模型)F07413 驱动:换向角出错(磁极位置检测)F07414 (N, A) 驱动:编码器序列号改变N07415 (F) 驱动:正在传送换向角偏移A07416 驱动:磁通控制器配置F07417 驱动脉冲方式不合理(电机模型)F07419 驱动:电流设定值滤波器自适应配置不一致F07420 驱动:电流设定值滤波器固有频率>香农频率F07420 驱动:电流设定值滤波器固有频率>香农频率F07421 驱动:转速滤波器固有频率>香农频率F07422 驱动:参考模型固有频率>香农频率F07423 驱动:APC 滤波器固有频率>香农频率A07424 驱动:APC 的运行条件无效F07425 驱动:APC 转速极限监控时间超期F07426 (A) 工艺控制器实际值达到极限值A07428 (N) 工艺控制器参数设置错误F07429 驱动:无编码器时不支持 DSCF07430 驱动:无法切换到转矩开环运行F07431 驱动:无法切换到无编码器运行F07432 驱动:电机无过压保护F07433 驱动:无法切换到带编码器运行,因为编码器没有解除驻留F07434 驱动:无法在脉冲使能时改变旋转方向F07435 (N) 驱动:无编码器的矢量控制,斜坡函数发生器设置错误F07439 驱动: 不支持该功能A07440 EPOS:急动时间达到了限值A07441 位置环:备份绝对值编码器调校的位置偏移F07442 (A) 位置环:多圈分辨率和模数范围不匹配F07443 (A) 位置环:参考点坐标超出允许范围F07446 (A) 负载变速箱:无法复位位置跟踪F07447 负载变速箱:位置跟踪超出最大实际值F07448 (A) 负载变速箱:位置跟踪线性轴超出最大范围F07449 (A) 负载变速箱:位置跟踪当前位置在公差范围之外F07450 (A) 位置环: 静态监控已响应F07451 (A) 位置环: 定位监控已响应F07452 (A) 位置环:跟随误差过大F07453 位置环:位置实际值处理出错A07454 位置环:位置实际值处理没有有效的编码器A07455 EPOS:最大速度受限A07456 EPOS:设定速度受到限制A07457 EPOS:输入信号组合错误F07458 EPOS:未找到参考点凸轮F07459 EPOS:不存在零脉冲F07460 EPOS:未找到参考点凸轮结束点A07461 EPOS:未设置参考点A07462 EPOS:所选运行程序段编号不存在A07463 (F) EPOS:在运行程序段中不要求进行外部程序段切换F07464 EPOS:运行程序段不一致A07465 EPOS:运行程序段没有后续程序段A07466 EPOS:多次配运行程序段编号A07467 EPOS:运行程序段包含错误的任务参数A07468 EPOS:运行程序段跳转目标不存在A07469 EPOS:运行程序段目标位置 < 负软件限位开关A07470 EPOS:运行程序段目标位置 > 正软件限位开关A07471 EPOS:运行程序段目标位置在模数范围之外A07472 EPOS: 运行程序段 ABS_POS/ABS_NEG 不可能A07473 (F) EPOS:到达运行范围起始处A07474 (F) EPOS:到达运行范围结束处F07475 (A) EPOS:目标位置 < 运行范围起始处F07476 (A) EPOS:目标位置 > 运行范围结束处A07477 (F) EPOS:目标位置 < 负软件限位开关A07478 (F) EPOS:目标位置 > 正软件限位开关A07479 EPOS:逼近负软件限位开关A07480 EPOS:逼近正软件限位开关F07481 (A) EPOS:轴位置 < 负软件限位开关F07482 (A) EPOS:轴位置 > 正软件限位开关A07483 EPOS:运行到固定挡块,未达到夹紧转矩F07484 EPOS:固定挡块在监控窗口之外F07485 (A) EPOS:未到达固定挡块A07486 EPOS: 中间停缺失A07487 EPOS:缺少运行任务取消F07488 EPOS:无法相对定位A07489 EPOS:参考点补偿在窗口之外F07490 (N) EPOS:运行时取消使能F07491 (A) EPOS:到达负停止凸轮F07492 (A) EPOS:到达正停止凸轮F07493 位置环:位置实际值的值范围溢出F07494 位置环:在运行时切换驱动数据组A07495 (F) 位置环:参考功能中断A07496 EPOS:无法使能A07497 位置环:位置设置值已激活A07498 (F) 位置环:无法进行测量头分析F07499 (A) EPOS:沿错误方向到达反向凸轮F07500 驱动:未定义功率单元数据组 PDSF07501 驱动:未定义电机数据组 MDSF07502 驱动:未定义编码器数据组 EDSF07503 EPOS:沿错误运行方向逼近停止凸轮A07504 驱动:电机数据组没有分配到驱动数据组A07505 EPOS: 在 V/f/SLVC 控制中无法执行固定挡块任务F07509 驱动:缺少组件号F07510 驱动:驱动数据组中有相同的编码器F07511 驱动:编码器多次使用F07512 驱动:无法设定编码器数据组转换参数A07514 (N) 驱动:数据结构和接口模式不相符F07515 驱动:功率单元和电机连接错误F07516 驱动:重新调试数据组F07517 驱动:编码器数据组转换参数设置错误F07518 驱动:电机数据组转换参数设置错误A07519 驱动:电机切换的参数设定错误A07520 驱动:无法执行电机切换A07530 驱动:驱动数据组 DDS 不存在A07531 驱动:指令数据组 CDS 不存在A07541 驱动:无法进行数据组转换A07550 (F, N) 驱动:无法复位编码器参数F07551 驱动编码器:没有换向角信息F07552 (A) 驱动编码器:不支持编码器配置F07553 (A) 驱动编码器:不支持编码器模块配置F07555 (A) 驱动编码器:位置跟踪配置F07556 测量变速箱:位置跟踪超出最大实际值A07557 (F) 编码器 1:参考点坐标超出允许范围A07558 (F) 编码器 2:参考点坐标超出允许范围A07559 (F) 编码器 3:参考点坐标超出允许范围F07560 驱动编码器:线数不是二的幂次方F07561 驱动编码器:多圈线数不是二的幂次方F07562 (A) 驱动编码器:增量编码器无法进行位置跟踪F07563 (A) 驱动编码器:XIST1_ERW 配置错误A07565 (F, N) 驱动:在 PROFIdrive 编码器接口 1 上的编码器错误A07566 (F, N) 驱动:在 PROFIdrive 编码器接口 2 上的编码器错误A07567 (F, N) 驱动:在 PROFIdrive 编码器接口 3 上的编码器错误A07569 (F) 编码器无法被检测F07575 驱动:电机编码器未就绪A07576 驱动:由于故障无编码器运行生效A07577 (F) 编码器 1:无法进行测量头分析A07578 (F) 编码器 2:无法进行测量头分析A07579 (F) 编码器 3:无法进行测量头分析A07580 (F, N) 驱动:编码器模块的组件号错误A07581 (F) 编码器 1:位置实际值处理出错A07582 (F) 编码器 2:位置实际值处理出错A07583 (F) 编码器 3:位置实际值处理出错A07584 编码器 1:位置设置值已激活A07585 编码器 2:位置设置值已激活A07586 编码器 3:位置设置值已激活A07587 编码器 1: 位置实际值处理没有有效的编码器A07588 编码器 2: 位置实际值处理没有有效的编码器A07589 编码器 3: 位置实际值处理没有有效的编码器A07590 (F) 编码器 1:在运行时切换驱动数据组A07591 (F) 编码器 2:在运行时切换驱动数据组A07592 (F) 编码器 3:在运行时切换驱动数据组A07593 (F, N) 编码器 1:超出位置实际值的值域A07594 (F, N) 编码器 2:超出位置实际值的值域A07595 (F, N) 编码器 3:超出位置实际值的值域A07596 (F) 编码器 1:参考功能中断A07597 (F) 编码器 2:参考功能中断A07598 (F) 编码器 3:参考功能中断F07599 (A) 编码器 1:无法校准F07600 (A) 编码器 2:无法校准F07601 (A) 编码器 3:无法校准F07800 驱动:没有功率单元F07801 驱动:电机过电流F07801 驱动:电机过电流F07802 驱动:整流单元或者功率单元未就绪A07805 (N) 整流单元:功率单元过载 I2tA07805 (N) 驱动:功率单元过载 I2tF07807 驱动:检测出短路/接地F07808 (A) HF 阻尼器:阻尼未就绪F07810 驱动:功率单元 EEPROM 无额定数据F07815 驱动:功率单元已修改F07815 驱动:功率单元已修改F07815 驱动:功率单元已修改A07820 驱动:未连接温度传感器A07825 (N) 驱动:模拟运行已激活F07826 驱动:模拟运行的直流母线电压过高F07840 驱动:缺少整流单元运行F07841 (A) 驱动:取消整流单元运行A07850 (F) 外部报警 1A07851 (F) 外部报警 2A07852 (F) 外部报警 3F07860 (A) 外部故障 1F07861 (A) 外部故障 2F07862 (A) 外部故障 3。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这个主要是那个报文的起始地址,起始地址可能有些不同,可以在PLC的硬件组态里可以看到。
比如PLC 硬件组态的输出的起始地址是334,到357结束,那么PQW334就是111报文的STW1,PQ334.0-PQ335.7的每一位跟STW1的每一位对应PQW336就是对应POS_STW1,一次往下。
一直到PQW356对应最后一个控制字MDI-DEC。
输出的也是一次对应状态字,ZSW1,POS_ZSW1.........WARN_CODE
可能出现的问题:
1. S120的基本定位功能必须在项目离线的情况下进行配置,步骤为离线、配置、驱动配置、激活基本定
位、选择111报文、报文结构、传输到硬件组态。
配置结束后在线,连接驱动器。
读参数r108.3=1,r108.4=1就表示基本定位功能已激活。
2. 硬件限位的设计牵涉到许多方面,有安全回路设计的硬件限位,只能采用强制短路开关暂时短接限位
开关,在此状态下驱动只能通过低速点动退出硬限位
3. 请教个问题,一般是怎么退出硬限位的呀?复位故障后反向转即可.
4. 如果你选择的是s120 的111 报文的话,s120 发给plc 的第6和7个字就是位置实际值,不过它
的单位是LU,负载转一圈的LU值可以在参数p2506 中查到,你要转换成角度值需要自己做一下转换;s120 发给plc 的第8和9个字就是速度实际值。
5. 用111报文使用MDI定位方式作绝对位置控制选择连续数据传输方式时,如何确定定位动作已完成?
可以查看状态位r2683.3,到达位置后其值为1,轴在运行时其值为0请教个问题,为提高定位的动态特性,如何做位置环的优化。
6. 跟速度环的优化没有什么区别,调节比例增益和积分时间,使位置实际值尽可能跟随位置给定,且超
调不要太大。