2015.-机械工程控制基础(仿真)实验指导书
机械控制工程基础实验指导书
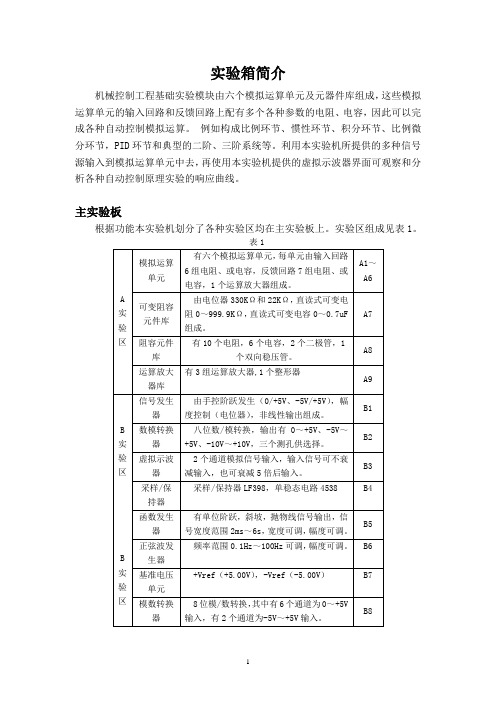
实验箱简介机械控制工程基础实验模块由六个模拟运算单元及元器件库组成,这些模拟运算单元的输入回路和反馈回路上配有多个各种参数的电阻、电容,因此可以完成各种自动控制模拟运算。
例如构成比例环节、惯性环节、积分环节、比例微分环节,PID环节和典型的二阶、三阶系统等。
利用本实验机所提供的多种信号源输入到模拟运算单元中去,再使用本实验机提供的虚拟示波器界面可观察和分析各种自动控制原理实验的响应曲线。
主实验板根据功能本实验机划分了各种实验区均在主实验板上。
实验区组成见表1。
虚拟示波器的使用一、设置用户可以根据不同的要求选择不同的示波器,具体设置方法如下: 1、示波器的一般用法:运行LABACT 程序,选择“工具”栏中的‘单迹示波器’项或‘双迹示波器’项,将可直接弹出该界面。
‘单迹示波器’项的频率响应要比‘双迹示波器’项高,将可观察每秒6500个点;‘双迹示波器’项只能观察每秒3200个点。
点击开始即可当作一般的示波器使用。
2、实验使用:运行LABACT 程序,选择‘自动控制 / 微机控制 / 控制系统’菜单下的相应实验项目,再选择开始实验,就会弹出虚拟示波器的界面,点击开始即可使用本实验机配套的虚拟示波器(B3)单元的CH1、CH2测孔测量波形。
二、虚拟示波器的使用1、虚拟示波器的一般使用图1 虚拟示波器运行界面图1为示波器的时域显示和相平面显示界面,只要点击开始,示波器就运行了,此时就可以用实验机上CH1和 CH2来观察波形。
CH1和 CH2各有输入范围选择开关,当输入电压小于-5V ~+5V 应选用x1档,如果大于此输入范围应选用x5挡(表示衰减5倍)。
该显示界面中提供了示波和X-Y 两种方式,示波就是普通示波器的功能,它提供了示波器的时域显示,X-Y 相当于真实示波器中的X-Y 选项;如果需要用X-Y 功能,只要选中X-Y 选项即可,它提供了示波器的相平面显示,进行非线性系统的相平面分析,实验中必须用X-Y 功能。
《机械控制工程》实验指导书(DOC)

机械工程控制实验指导书南昌大学机电工程学院2014 年10 月目录1.概述 (2)2.实验一典型环节的电路模拟与软件仿真研究 (6)3.实验二典型系统动态性能和稳定性分析 (13)4.实验三典型环节(或系统)的频率特性测量 (17)5. 实验操作指导 (22)6. 典型环节仿真实验硬件模块配置及信号设置表 (23)7. 阶跃信号及响应曲线图 (25)一. 实验系统构成实验系统由上位PC微机(含实验系统上位机软件)、ACT-I实验箱、并行通讯线等组成。
ACT-I 实验箱内装有以ADC812芯片(含数据处理系统软件)为核心构成的数据处理卡,通过并口与PC 微机连接。
1 .实验箱ACT-I简介ACT-I控制理论实验箱(见图1 )主要由电源部分U1单元、信号源部分U2单元、与PC机通讯及数据处理U3单元、元器件单元U4非线性单元U5〜U7以及模拟电路单元U8〜U16 等共16个单元组成。
(1)电源单元U1包括电源开关、保险丝、+ 5V、—5V、+ 15V、—15V、0V以及1.3V〜15V可调电压的输出,它们提供了实验箱所需的所有工作电源。
(2)信号源单元U2可以产生频率与幅值可调的周期方波信号、周期斜坡信号、周期抛物线信号以及正弦信号,并提供与周期阶跃、斜坡、抛物线信号相配合的周期锁零信号。
该单元面板上配置的拨键S1和S2用于周期阶跃、斜坡、抛物线信号的频率段选择,可有以下4种状态:①S1和S2均下拨一一输出信号周期的调节范围为2〜60ms;②S1上拨、S2下拨一一输出信号周期的调节范围为0.2〜6s;③S1下拨、S2上拨一一输出信号周期的调节范围为20〜600ms;④S1和S2均上拨一一输出信号周期的调节范围为0.16〜7s;另有电位器RP1用于以上频率微调。
电位器RP2、RP3和RP4依次分别用于周期阶跃、斜坡与抛物线信号的幅值调节。
在上述S1和S2的4种状态下,阶跃信号的幅值调节范围均为0〜14V;除第三种状态外,其余3种状态的斜坡信号和抛物线信号的幅值调节范围均为0〜15V;在第三种状态时,斜坡信号的幅值调节范围为0〜10V,抛物线信号的幅值调节范围为0〜2.5V。
机械工程控制基础实验指导书
《机械工程控制基础》实验指导书青岛科技大学前言机械工程控制基础是针对过程装备与控制工程专业而开设的一门专业基础课,主要讲解自动控制原理的主要内容,是一门理论性较强的课程,为了帮助学生学好这门课,能够更好的理解理论知识,在课堂教学的基础上增加了该实验环节。
《机械工程控制基础》实验指导书共编写了4个实验,有实验一、典型环节模拟研究实验二、典型系统动态性能和稳定性分析实验三、控制系统的频率特性分析实验四、调节器参数对系统调节质量的影响《机械工程控制基础》实验指导书的编写主要依据“控制工程基础”教材的内容,结合本课程教学大纲的要求进行编写。
利用计算机和MATLAB程序完成实验。
注:1)每个实验的实验报告均由5部分组成,最后一部分“实验数据分析”或“思考题”必须写。
2)每个实验所记录的图形均需标出横轴和纵轴上的关键坐标点。
目录实验一典型环节模拟研究 (4)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求实验二典型系统动态性能和稳定性分析 (7)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求实验三控制系统的频率特性分析 (9)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求实验四调节器参数对系统调节质量的影响 (11)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求附录一:MATLAB6.5的使用 (13)实验一典型环节模拟研究一、实验目的1.熟悉各种典型环节的阶跃响应曲线2.了解参数变化对典型环节动态特性的影响。
二、实验要求1.观测并记录各种典型环节的阶跃响应曲线2.观测参数变化对典型环节阶跃响应的影响,测试并记录相应的曲线三、实验原理1.惯性环节(一阶环节),如图1-1所示。
(a) 只观测输出曲线(b) 可观测输入、输出两条曲线图1-1 惯性环节原理图2.二阶环节,如图1-2所示。
或图1-2 二阶环节原理图3.积分环节,如图1-3所示。
机械控制基础实验报告(3篇)
第1篇一、实验目的1. 掌握机械控制基础实验的基本原理和方法。
2. 熟悉实验设备和仪器,了解其工作原理。
3. 培养实验操作技能,提高实验数据分析能力。
4. 培养团队合作精神,提高沟通协调能力。
二、实验内容本次实验主要分为以下三个部分:1. 机械系统运动学分析2. 机械系统动力学分析3. 机械控制系统仿真三、实验原理1. 机械系统运动学分析运动学分析是研究物体运动规律的科学,主要包括位移、速度、加速度等基本运动参数。
在本实验中,我们通过实验设备对机械系统进行运动学分析,得到位移、速度、加速度等运动参数,进而研究机械系统的运动规律。
2. 机械系统动力学分析动力学分析是研究物体运动状态变化的原因和规律的科学。
在本实验中,我们通过实验设备对机械系统进行动力学分析,得到力、力矩、惯性力等基本力学参数,进而研究机械系统的动力学特性。
3. 机械控制系统仿真控制系统仿真是一种基于计算机的技术,通过对控制系统进行数学建模,模拟实际控制系统的工作过程。
在本实验中,我们利用仿真软件对机械控制系统进行建模和仿真,研究控制系统在不同参数下的性能。
四、实验设备1. 机械系统运动学分析实验设备:运动传感器、数据采集卡、计算机等。
2. 机械系统动力学分析实验设备:测力传感器、测力矩传感器、数据采集卡、计算机等。
3. 机械控制系统仿真软件:MATLAB/Simulink等。
五、实验步骤1. 机械系统运动学分析1.1 连接实验设备,确保传感器与数据采集卡连接正常。
1.2 启动数据采集软件,设置采样频率和采集时间。
1.3 启动机械系统,观察运动传感器输出信号。
1.4 对采集到的数据进行处理,得到位移、速度、加速度等运动参数。
1.5 分析机械系统的运动规律。
2. 机械系统动力学分析2.1 连接实验设备,确保传感器与数据采集卡连接正常。
2.2 启动数据采集软件,设置采样频率和采集时间。
2.3 启动机械系统,观察测力传感器和测力矩传感器输出信号。
《机械工程控制基础》Matlab仿真实验报告单(实验三)

红河学院工学院实验报告单《机械工程控制基础》Matlab仿真实验报告单课程名称:《机械工程控制基础》实验姓名:日期:成绩:年级专业:2011级机械工程学号:实验场地:任美福楼222实验三:二阶线性系统时域性能指标的Matlab仿真实验一、实验内容。
1、二阶线性系统2424s s++单位阶跃响应的时域性能指标。
2、二阶线性系统236 1236s sξ++,当0.1,0.4,0.7,1,2,3ξ=时,单位阶跃响应的Matlab仿真。
3、二阶线性系统222nn ns sωωω++,当0.5,1,1.5,3,5,10nω=时,单位阶跃响应的Matlab仿真。
二、实验目的。
1、熟悉Matlab操作;2、常握Matlab中二阶线性系统的时域性能指标的求法。
3、常握Matlab中二阶线性系统无阻屁固有频率不变,阻尼比变化时对单位阶跃响应的影响,以及阻尼比不变时,无阻尼固有频率变化时对单位阶跃响应的影响。
三、相关Matlab仿真程序与仿真图形。
四、根据实验结果,讨论:(1)当二阶线性系统无阻尼固有频率不变时,阻尼ω比ξ对调节时间的影响;(2)当二阶线性系统阻尼比不变时,无阻尼固有频率n 对调节时间的影响;附件:程序1 二阶线性系统2848s s ++单位阶跃响应的时域性能指标。
clearnum=[8];den=[1 4 8];disp('二阶系统传递函数') %运行结果显示“二阶系统传递函数”这样的字样。
disp是一命令。
Gs=tf(num,den)disp('无阻尼固有频率与阻尼比')[Wn Xita ]=damp(Gs) %damp 是一个命令,用于求取传递函数的无阻尼固有频率、阻尼比、极点。
Wn 是一变量符号,表示无阻尼固有频率n ω,Xita 一变量符号,表示阻尼比ξ。
Wn=Wn(1) %取无阻尼固有频率。
Xita= Xita(1) %取阻尼比disp('二阶系统性能指标如下')tr=(pi-atan(sqrt(1-Xita^2)/ Xita))/Wn/sqrt(1-Xita^2) %上升时间tp=pi/Wn/sqrt(1-Xita^2) %峰值时间ts= 3.5/Xita/Wn %调整时间Mp= exp(-pi*Xita/sqrt(1-Xita^2))*100 %最大超调量程序2 二阶线性系统2641664s s ξ++,当0.1,0.2,0.4,0.7,1.0,2.0ξ=时,单位阶跃响应的Matlab 仿真。
机械控制工程基础实验指导书版

河南机电高等专科学校《机械控制工程基础》实验指导书专业:机械制造与自动化、起重运输机械设计与制造等机械制造与自动化教研室编2012年12月目录实验任务和要求............................................................................................................................................. 实验模块一MATLAB基础实验............................................................................................................ 实验模块二典型环节及其阶跃响应 ...................................................................................................... 实验模块三二阶系统阶跃响应 ............................................................................................................. 实验模块四控制系统的稳定性分析 .................................................................................................... 实验模块五基于Simulink控制系统的稳态误差分析..................................................................... 实验模块六线性系统的频域分析...........................................................................................................实验任务和要求一、自动控制理论实验的任务自动控制理论实验是自动控制理论课程的一部分,它的任务是:1、通过实验进一步了解和掌握自动控制理论的基本概念、控制系统的分析方法和设计方法;2、重点学习如何利用MATLAB工具解决实际工程问题和计算机实践问题;3、提高应用计算机的能力及水平。
机械系统控制基础实验指导书完整版

机械系统控制基础实验指导书完整版1. 实验目的本实验旨在通过机械系统控制基础实验的设计与实施,帮助学生深入理解机械系统的控制原理与方法,提高其工程实践能力。
2. 实验原理2.1 机械系统的基本组成和工作原理2.2 机械系统的数学建模2.3 机械系统的控制方法与策略3. 实验器材3.1 电脑3.2 控制器3.3 传感器3.4 电动机3.5 运动平台4. 实验内容4.1 实验一:机械系统的建模与控制4.1.1 步骤一:搭建机械系统的物理模型4.1.2 步骤二:进行系统辨识并获取系统参数4.1.3 步骤三:设计控制器,实现对机械系统的控制4.2 实验二:机械系统的位置控制实验4.2.1 步骤一:确定位置控制的目标和性能指标4.2.2 步骤二:设计位置控制器,实现机械系统的位置控制4.3 实验三:机械系统的速度控制实验4.3.1 步骤一:确定速度控制的目标和性能指标4.3.2 步骤二:设计速度控制器,实现机械系统的速度控制5. 实验步骤5.1 实验一:5.1.1 搭建机械系统的物理模型,将传感器和电动机连接至运动平台,连接控制器至电脑。
5.1.2 进行系统辨识实验,获取机械系统的相关参数。
5.1.3 根据系统参数设计控制器,并对机械系统进行控制实验。
5.2 实验二:5.2.1 根据位置控制目标和性能指标,设计位置控制器。
5.2.2 将设计的控制器连接至电脑和电动机,实施位置控制实验。
5.3 实验三:5.3.1 根据速度控制目标和性能指标,设计速度控制器。
5.3.2 将设计的控制器连接至电脑和电动机,实施速度控制实验。
6. 实验报告每个实验完成后,学生需撰写实验报告,内容包括实验目的、理论基础、实验步骤、实验结果与分析等。
7. 实验安全7.1 在实验过程中,注意安全操作,避免发生意外伤害。
7.2 未经指导老师允许,不得擅自改动实验器材或调整实验参数。
8. 参考资料[1] 《机械系统控制原理与应用》[2] 《机械系统建模与控制技术》以上为机械系统控制基础实验指导书的完整版,希望能对实验教学提供有力的支持和指导。
《机械控制工程基础》实验指导书

《机械控制工程基础》实验指导书华东交通大学机电学院实验一 典型环节模拟一、实验目的①了解、掌握计算机模拟典型环节的基本方法。
②熟悉各种典型环节的阶跃响应曲线。
③了解各种参数变化对典型环节动态特性的影响。
④了解计算机辅助分析和设计的特点与优点二、实验要求①通过计算机的仿真图形观测各种典型环节时域响应曲线。
②改变参数,观测参数变化时对典型环节时域响应的影响。
④对实验程序加上注释,写出实验报告。
三、实验内容一般来讲,线性连续控制系统通常都是由一些典型环节构成的,这些典型环节有比例环节、积分环节、一阶微分环节、惯性环节、振荡环节、延迟环节等。
下面分别对其性能进行仿真(建议实验程序在M 文件中用单步执行的方式执行程序,以便于分析):1)比例环节比例环节的传递函数为:k s G =)(编程分析当k=1~10时,比例环节在时域的情况:①当输人信号是单位阶跃信号时,比例环节的输出曲线(单位阶跃响应曲线)是什么形状呢?实验程序如下:for k=1:1:10num=k;den=1;G=tf(num,den);step(G);hold on;end在M 文件的窗口中,输入程序,录入程序完成后,保存该M 文件,在弹出的“保存为”窗工中输人M 文件名bl.m (也可以自己取文件名),选择存放该M 文件的路径,就可以完成保存工作,然后单击“Tools ”菜单中的“Run ”,将在step 图形窗口中显示出响应图形。
试分析系统的输出信号的特点。
2)积分环节积分环节的传递函数为: Ts G 1)(= ① 当输人信号是单位阶跃信号时,积分环节的仿真程序如下:num=1;den=[1,0];G=tf(num,den);step(G)执行程序,试分析系统的输出信号的特点。
若G(s)=k/s ,编程分析当K=1~10时,在单位阶跃信号激励下,积分环节时域响应的情况。
3)一阶微分环节一阶微分环节的传递函数为: 1)(+=Ts s G①当输入信号是单位阶跃信号时,一阶微分环节的输出在MA TLAB 的函数step ()中是无法绘制的。
机械工程控制基础仿真实验

1 y1(r)<1 1=(1)*0.001; % [](y1)1=(1)*0.001; % 1=(); % 1001 y1(s)>1 & y1(s)<11 1=(1)*0.001; % 1 y2(r)<1 2=(1)*0.001;[](y2); 2=(1)*0.0012=(); 1001 y2(s)>1 3(s)<11 2=(1)*0.001; % 1 y3(r)<1 3=(1)*0.001;[](y3); 3=(1)*0.001; 3=(); 1001 y3(s)>1 & y3(s)<11 3=(1)*0.001; % [1 1 1 12 2 2 23 3 3 3]
1 y1(r)<1 1=(1)*0.001; % [](y1)1=(1)*0.001; % 1=(); % 1001 y1(s)>1 & y1(s)<11 1=(1)*0.001; % 1 y2(r)<1 2=(1)*0.001;[](y2); 2=(1)*0.0012=(); 1001 y2(s)>1 3(s)<11 2=(1)*0.001; % 1 y3(r)<1 3=(1)*0.001;[](y3); 3=(1)*0.001; 3=(); 1001 y3(s)>1 & y3(s)<11 3=(1)*0.001; %输出时间响应和单位阶跃干扰响应最大值 [1 1 1 12 2 2 23 3 3 3] [(4) (5) (6)]
P115和p99页的例3,第三章
例 已知系统的传递函数为: G(s)0.05s2(15050)s50
求系统在时间常数 不同取值时的单位脉冲响应、 单位阶跃响应和任意输入响应。
实验二《机械工程控制基础》Matlab仿真实验报告单

实验二《机械工程控制基础》Matlab仿真实验报告单实验二《机械工程控制基础》Matlab仿真实验报告单红河学院工学院实验报告单《机械工程控制基础》Matlab仿真实验报告单课程名称:机械工程控制基础姓名:徐海洋日期:201*-11-26成绩:年级专业:07机械学号:201*03050665实验场地:文514实验序号:实验二实验名称:二阶线性系统时间响应与时域性能指标的Matlab仿真实验一、实验内容。
1、二阶线性系统仿真。
2、二阶线性系统4s2s436s12s36216s4s162单位脉冲响应、单位阶跃响应、单位正弦输入响应的Matlab2单位阶跃响应的时域性能指标。
3、二阶线性系统仿真。
,当01274,0.1,0..时,单位阶跃响应的Matlab二、实验目的。
三、相关Matlab仿真程序。
程序一:>>clearnum=[16];den=[1416];Gs=tf(num,den)t=0:0.1:20;figure(1);impulse(Gs,t)xlabel("时间")ylabel("输出")title("二阶系统单位脉冲响应")figure(2);step(Gs,t)xlabel("时间")ylabel("输出") title("二阶系统单位阶跃响应")figure(3);r=sin(t);lsim(Gs,r,t)xlabel("时间")ylabel("输出")title("二阶系统单位正弦输入响应")Transferfunction:16--------------s^2+4s+16程序二:>>clearnum=[4];den=[124];disp("二阶系统传递函数")Gs=tf(num,den)disp("无阻尼固有频率与阻尼比")[WnXita]=damp(Gs)Wn=Wn(1)Xita=Xita(1)disp("二阶系统性能指标如下")tr=(pi-atan(sqrt(1-Xita^2)/Xita))/Wn/sqrt(1-Xita^2)tp=pi/Wn/sqrt(1-Xita^2)ts=3.5/Xita/WnMp=exp(-pi*Xita/sqrt(1-Xita^2))*100二阶系统传递函数Transferfunction:4-------------s^2+2s+4无阻尼固有频率与阻尼比Wn=2.00002.0000Xita=0.50000.50Wn=2.0000Xita=0.5000二阶系统性能指标如下tr=1.2092tp=1.8138ts=3.5000Mp=16.3034程序三:clearclcnum=1;Wn=6;xita1=0.1;den1=[1/Wn^22*xita1/Wn1];xita2=0.2;den2= [1/Wn^22*xita2/Wn1];xita3=0.4;den3=[1/Wn^22*xita3/Wn1] ;xita4=0.7;den4=[1/Wn^22*xita4/Wn1];xita5=1.0;den5=[1/ Wn^22*xita5/Wn1];xita6=2.0;den6=[1/Wn^22*xita6/Wn1];t= 0:0.05:4;[y1xt]=step(num,den1,t);[y2xt]=step(num,den2,t);[y 3xt]=step(num,den3,t);[y4xt]=step(num,den4,t);[y5xt]=s tep(num,den5,t);[y6xt]=step(num,den6,t);figure(1)plot(t,y1,"b-",t,y2,"r--",t,y3,"k",t,y4,"g:",t,y5,"m-.",t,y6,"b.");xlabel("t(s)"),ylabel("y(t)");title("阻尼比xita=0.1,0.2,0.4,0.7,1.0,2.0")legend("xita1=0.1","xita2=0.2","xita3=0.4","xita4=0.7","xita5=1","xita6=2")四、相关Matlab仿真图形。
工学机械工程控制基础实验指导书
机械工程控制基础实验指导书姓名:班级:概述:MATLAB是Math Works公司的软件产品,是一个高级的数值分析、处理和计算的软件,其强大的矩阵运算能力和完美的图形可视化功能,使得它成为国际控制界应用最广泛的首选计算机工具。
MATLAB具有良好的的可扩展性,其函数大多数为ASCII文件,可以直接进行编辑、修改;其工具箱可以任意增加,任何人可以生成自己的MATLAB工具箱。
因此,很多研究成果被直接做成MATLAB工具箱发表。
SIMULINK是基于模型化图形的动态系统仿真软件,是MATLAB的一个工具箱,它使系统分析进入一个崭新的阶段,它不需要过多地了解数值问题,而是侧重于系统的建模、分析和设计。
其良好的人机界面及周到的帮助功能使得它广为科技界和工程界采用。
因此,本试验将尽可能把MATLAB和SIMULINK工具应用于控制系统的分析和计算中。
试验一:用MATLAB进行传递函数的描述1、试验目的:(1)对MATLAB进行初步的了解;(2)掌握应用MATLAB建立传递函数的常用方法(3)了解应用MATLAB对高阶函数进行部分分式的展开。
2、试验学时:3学时3、试验方法:(1)传递函数的分子分母多项式模型传递函数表示为11101110...()()()...m mm mn nn nb s b s b s bC sG sR s a s a s a s a----++++ ==++++MATLAB中可直接用分子、分母多项式系数表示,即num=[b m, b m-1,…,b0]den=[a m, a m-1,…,a0]G=tf(num,den);当分子或分母表现为多项式乘积形式时,可利用conv函数来获取分子或分母的系数数组。
掌握conv函数的使用方法。
(2)传递函数的零极点增益模型传递函数为 0101()()...()()()()...()m n s z s z s z G s K s p s p s p ---=--- 其中:K 为系统增益,zi 为零点,pj 为极点在MATLAB 中零极点增益模型用[z,p,K]矢量组表示。
机械工程控制基础实验
验曲线通过ω=1(rad/s)时的y坐标值,频率
实验曲线从0dB/dec线到-20dB/dec线的转折点,则(本系统转折频 率在数值上与截止频率相等,截止频率是实验曲线通过水平段下降 -3dB线时对应的x坐标值)。分别从0.5V和1V实验曲线估计传递函 数,比较二者的异同。
表2-1 开环频率特性测试数据记录表(1V正弦输入信号)
测速电机
幅值(=
幅值(=
频率(Hz) 频率(1/s) 输出电压
20logUo/Ui)) 相位差
Uo/Ui)
峰峰值(V)
(dB)
2.5
5
10
15
20
25
30
35 40 45 50 55 60
65 70 75
五、实验报告 1) 对实验内容与实验过程进行描述; 2) 记录实验数据,对实验结果进行分析; 3) 回答任意两道思考题; 4) 实验总结,包括实验中遇到的问题及思考、对本实验的意见 与建议。
议。
六、思考题 1)如何利用数字示波器观察阶跃响应曲线和测量一阶系统的时间
常数?如何测量稳态增益?
2)除了测速电机外,测量转速还有哪些方法?试画出系统方框 图。
3)为什么作为阶跃输入信号的方波信号,其周期要大于系统过渡 过程时间的两倍?
实验二 频率特性测试实验
一、实验目的 1)熟悉典型系统的频域特性。2)掌握机电系统频域特性和传递函数的测试方法。
本实验指导书由陈永亮老师编写
实验一 时域特性测试实验
一、实验目的 1)熟悉典型输入信号; 2)了解典型系统的时间响应。 3)掌握典型机电系统时域特性的测试方法。
机械系统控制基础实验指导书
机械系统控制基础实验指导书1. 实验目的本实验旨在帮助学生理解机械系统控制的基本原理,并通过实际操作加深对相关知识的理解和掌握。
2. 实验器材- 电脑- 控制器- 电动机- 传感器- 连接线等3. 实验步骤步骤一:系统控制概述1. 介绍机械系统控制的基本概念和目的。
2. 讲解控制系统的组成和相关术语。
步骤二:控制器的配置1. 演示如何配置控制器,包括连接电源和输入输出设备。
2. 介绍控制器的相关设置和参数调整。
步骤三:传感器的应用1. 分析不同类型的传感器及其在机械系统控制中的应用。
2. 演示如何连接和使用传感器,获取实时数据。
步骤四:控制算法的设计1. 介绍几种常见的控制算法,如比例控制、积分控制和微分控制。
2. 演示如何设计和实现控制算法,包括参数设置和代码编写。
步骤五:系统调试和优化1. 指导学生进行系统调试,包括输入输出信号的监测和调整。
2. 引导学生思考如何通过优化控制策略提高系统性能。
4. 实验注意事项- 在进行实验操作时,务必注意安全,避免发生意外事故。
- 确保所有器材和设备的正常运作,避免出现故障。
- 严格按照指导书的步骤进行实验,不得随意更改。
- 如遇到问题或困惑,请及时向实验指导人员寻求帮助。
5. 实验成果整理1. 学生需撰写实验报告,详细记录实验过程、结果和分析。
2. 实验报告包括实验目的、所用器材、实验步骤、实验结果、实验分析等部分。
3. 实验报告撰写完毕后,需按时提交给实验指导人员。
以上为《机械系统控制基础实验指导书完整版》的内容概要。
实验指导书的具体内容和步骤可能因实验设置和教学需求而有所调整。
2015.-机械工程控制基础(仿真)实验指导书

机械工程控制基础实验指导书机械控制工程实验室2015年10月学生实验规则1、实验前,学生要认真阅读实验指导书中内容,以求对实验目的、内容、方法和步骤有初步的了解。
2、遵守实验室的各项规章制度,听从教师的指导,实验时必须严肃、认真、细致。
3、要求在教师指导下,独立按时完成规定的实验内容。
4、实验过程中,学生不得无故迟到、早退、旷课、有事须请假批准。
5、遵守操作规则,注意安全。
6、爱护实验中用到的相关设备与工具,丢失损失东西,及时报告,照价赔偿。
7、实验结束,应将设备、仪器、工具清理干净,搞好当天卫生。
实验一典型环节时域特性的仿真实验一实验目的1、通过观察典型环节在单位阶跃信号作用下的动态特性,熟悉各种典型环节的响应曲线。
2、定性了解各参数变化对典型环节动态特性的影响。
3、初步了解Matlab中Simulink的使用方法。
二实验内容研究典型环节(比例、积分、微分、惯性、二阶)在阶跃输入信号及白噪声干扰信号输入的响应。
三实验方法及步骤1、建立仿真模型系统1.1 运行Matlab,在命令窗口“Command Window”下键入“Simulink”后回车,则打开相应的系统模型库;或者点击菜单上的“Simulink”图标,进入系统仿真模型库。
然后点击左上角“创建新文件图标”,打开模型编辑窗口。
1.2 调出模块在系统仿真模型库中,把要求的模块都放置在模型编辑窗口里面。
从信号源模块包(Sources)中拖出1个阶跃信号(step)和1个白噪声信号发生器(band-limited white noise) ;从输出模块包(Sinks)中拖出1个示波器(Scope);从连续系统典型环节模块包(Continuous) 中拖出1个微分环节(Derivative)和3个传函环节(Transfer Fcn);从数学运算模块包(Math Operations)中拖出1个比例环节(Gain)和1个加法器(Sum) ;从信号与系统模块包(Signals Routing) 拖出1个汇流排(Mux);所有模块都放置在模型编辑窗口里面。
《机械工程控制基础》上机仿真实验

实验报告课程名称:实验项目:专业班级:学号:姓名:指导教师:日期:机械工程实验教学中心专业班级: 学 号: 姓 名:机控上机仿真实验一、系统时间响应仿真1、利用MATLAB 仿真输入信号为单位脉冲信号的一阶惯性系统的时间响应2、利用MATLAB 仿真输入信号为单位阶跃信号的一阶惯性系统的时间响应3、分析时间响应曲线的特点附仿真程序及仿真结果t=[0:0.01:0.8];%建立仿真时间区间%% 三种tao 值下的系统模型 %nG=[50];tao=0; dG=[0.05 1+50*tao 50]; G1=tf(nG , dG);tao=0.0155; dG=[0.05 1+50*tao 50]; G2=tf(nG, dG);tao=0.035; dG=[0.05 1+50*tao 50]; G3=tf(nG , dG);%系统响应%[y1, T]= impulse(G1,t); [y1a,T]=step(G1,t);[y2, T]= impulse(G2,t); [y2a,T]=step(G2,t);[y3, T]= impulse(G3,t); [y3a,T]=step(G3,t);%生成图像%subplot(121), plot(T,y1, '-', T,y2, '-.', T,y3, '*');legend('tao=0', 'tao=0.0155', 'tao=0.035')xlabel('t(sec)'), ylabel('x(t)');grid on;subplot(122), plot(T,y1a, '-', T,y2a, '-.', T,y3a, '*');legend('tao=0', 'tao=0.0155', 'tao=0.035')xlabel('t(sec)'), ylabel('x(t)');grid on;仿真结果:025.0,0125.00,50)501(05.050)(2,分别取ττ+++=s s s G专业班级: 学 号: 姓 名:二、系统时间响应的瞬时误差仿真1、仿真系统的响应的误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械工程控制基础实验指导书机械控制工程实验室2015年10月学生实验规则1、实验前,学生要认真阅读实验指导书中内容,以求对实验目的、内容、方法和步骤有初步的了解。
2、遵守实验室的各项规章制度,听从教师的指导,实验时必须严肃、认真、细致。
3、要求在教师指导下,独立按时完成规定的实验内容。
4、实验过程中,学生不得无故迟到、早退、旷课、有事须请假批准。
5、遵守操作规则,注意安全。
6、爱护实验中用到的相关设备与工具,丢失损失东西,及时报告,照价赔偿。
7、实验结束,应将设备、仪器、工具清理干净,搞好当天卫生。
实验一典型环节时域特性的仿真实验一实验目的1、通过观察典型环节在单位阶跃信号作用下的动态特性,熟悉各种典型环节的响应曲线。
2、定性了解各参数变化对典型环节动态特性的影响。
3、初步了解Matlab中Simulink的使用方法。
二实验内容研究典型环节(比例、积分、微分、惯性、二阶)在阶跃输入信号及白噪声干扰信号输入的响应。
三实验方法及步骤1、建立仿真模型系统1.1 运行Matlab,在命令窗口“Command Window”下键入“Simulink”后回车,则打开相应的系统模型库;或者点击菜单上的“Simulink”图标,进入系统仿真模型库。
然后点击左上角“创建新文件图标”,打开模型编辑窗口。
1.2 调出模块在系统仿真模型库中,把要求的模块都放置在模型编辑窗口里面。
从信号源模块包(Sources)中拖出1个阶跃信号(step)和1个白噪声信号发生器(band-limited white noise) ;从输出模块包(Sinks)中拖出1个示波器(Scope);从连续系统典型环节模块包(Continuous) 中拖出1个微分环节(Derivative)和3个传函环节(Transfer Fcn);从数学运算模块包(Math Operations)中拖出1个比例环节(Gain)和1个加法器(Sum) ;从信号与系统模块包(Signals Routing) 拖出1个汇流排(Mux);所有模块都放置在模型编辑窗口里面。
1.3 模块参数设置双击打开3个传函环节(Transfer Fcn),通过设定参数(参照图1的数据),分别构成积分、惯性和二阶环节;打开比例环节,设定比例增益为2;打开白噪声信号发生器,设定功率(Noise power)为0.0001,采样时间(Sample time)为0.05。
1.4 模块连接将各模块连接成如图1所示的仿真模型系统。
图1仿真模型系统2、实验仿真2.1 双击Scope打开示波器,点击按钮“ ”启动仿真,画出输入信号波形图。
2.2 将比例环节的输出端接到汇流排(如图1所示),打开示波器, 点击按钮“ ”启动仿真,观察比例环节的阶跃响应及对白噪声信号是否敏感,然后画出波形图。
2.3 将微分环节的输出端接到汇流排。
重复2.2操作实验,记录结果并画出波形图。
2.4 将积分环节的输出端接到汇流排,设置3个不同的时间常数(T=1、2、4),重复实验,观察不同时间常数时的波形特性,记录结果并画出波形图。
(≯提示:鼠标左键双击各典型环节,则可以进行参数设置。
)2.5 将惯性环节的输出端接到汇流排,设置3个不同的时间常数(T=1、2、4)重复实验,观察不同时间常数时的波形特性,记录结果并画出波形图。
2.6 将二阶环节的输出端接到汇流排,设置不同的阻尼比(ξ=0、ξ=0.3、ξ=0.7、ξ=1.0 、ξ=1.4),重复以上实验,观察不同阻尼比时的波形特性,记录结果并画w=1)出波形图。
(注:n3、数据记录输入和输出响应图(注意:作图时尺寸比例按实际标出)输入信号比例环节输出响应微分环节输出响应积分环节输出响应惯性环节输出响应二阶系统输出响应四实验报告要求1、作出各种典型环节的响应曲线。
2、分析各典型环节在单位阶跃信号作用下的动态特性。
3、分析各参数变化对典型环节动态特性的影响。
4、结合实验过程中遇到的问题谈谈对实验的看法。
实验二 典型环节频域特性的仿真实验一 实验目的1、加深了解系统频率特性的概念。
2、学习使用Matlab 软件绘制Nyquist 图、Bode 图的基本方法。
3、掌握典型环节的频率特性。
二 实验内容用Matlab 绘制典型环节(比例、积分、微分、惯性、二阶)的Nyquis 图、Bode 图,研究频率特性。
三 实验方法及步骤1、例子:绘制系统传递传递函数1/(s 2+0.8s+1)的频率特性图。
运行Matlab ,进入命令窗口,键入命令: num=[1]; den=[1,0.8,1]; G1=tf(num,den) Nyquist(G1) 则显示传递函数18.012++s s ,及对应的Nyquist 图曲线(图1),观察并分析曲线,然后记录该曲线,并要求在曲线图上注明频率ω的变化情况。
再键入命令:Bode(G1) (%回车)则显示对应的Bode 图曲线(图2),观察并分析曲线,然后记录该曲线,并要求在曲线图上注明 纵、横 坐标。
Nyquist DiagramReal AxisI m a g i n a r y A x i s图1M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)图22、要求按照上面例子所介绍的基本方法,绘制以下的典型环节的波德图和奈奎斯特图,并要求分析频率特性。
各典型环节(比例、积分、微分、惯性、二阶)的传函分别为:比例:g(s)=2 积分:g(s)=1/4s 微分:g(s)=s 惯性:g(s)=1/(0.2s+1) 二阶:g(s)=1/(s 2+1.2s+1) 3、数据记录绘出各典型环节的Nyquist 图、Bode 图。
四 实验报告要求1、画出各典型环节的Nyquist 图、Bode 图。
2、利用Nyquist 图、Bode 图对环节的频率特性进行分析。
3、结合实验过程中遇到的问题谈谈对实验的看法。
实验三 系统稳定性分析的仿真实验一 实验目的1、加深了解系统稳定性概念。
2、掌握使用Matlab 分析系统稳定性。
3、掌握使用Matlab 分析系统的频率特性。
二 实验内容1、 已知控制系统开环传递函数为:17.18.01.0)(23+++=s s s Ks G ,用Nyquist稳定判据判定开环放大系数K 为10和50时闭环系统的稳定性。
2、已知控制系统开环传递函数为:)11.0)(12.0()(++=s s s Ks G ,取K =10,要求:①绘制系统Bode 图,求出频域性能指标,并判断系统的稳定性;②改变开环增益K 值,分析K 变化对开环对数幅频、相频特性曲线的影响; ③根据给出的稳定裕量,作K 参数设计,并评估系统性能。
三 实验方法及步骤实验内容一进入Matlab 命令窗口: 1、当K=10时,输入命令num=[10]; %分子系数 den=[0.1,0.8,1.7,1]; %分母系数g1=tf(num,den); %建立系统多项式模型 nyquist(g1) %绘制Nyquist 图分析开环系统Nyquist 图,曲线是否包围(-1,j0)点?因此闭环系统稳定吗?2、当K=50时,输入命令num=[50]; %分子系数 den=[0.1,0.8,1.7,1]; %分母系数g2=tf(num,den); %建立系统多项式模型 nyquist(g2) %绘制Nyquist 图分析开环系统Nyquist 图,曲线顺时针包围(-1,j0)点几圈?表明闭环系统稳定性如何?有几个右半s 平面的极点?实验内容二进入Matlab 命令窗口,输入命令:num=[10];den1=conv([1,0],[0.2,1]); den2=[0.1,1];den=conv(den1,den2); g3=tf(num,den)[k,r,wg,wc]=margin(g3) %求系统的频率特性参数 margin (g3) %绘制系统Bode 图【注】命令margin ()用来求系统的频率特性参数,调用格式为:[k,r,wg,wc]=margin(sys)返回变量k —幅值裕度,r -相位裕度,wg -相位穿越频率, wc -幅值穿越频率。
①记录频率特性参数及判定系统的稳定性。
由程序运行结果和图示可知,幅值裕度k= ? , 即 ?db ;相位穿越频率wg= ? rad/s ;相角裕度r= ? ;幅值穿越频率wc= ? rad/s 。
根据上述的性能特性参数和Bode 图,判定系统是否稳定?②改变K 值,分别取K 为5,15,20值时,观察系统的开环对数幅频、相频特性曲线的变化,分析K 值变化对其影响。
③设计K 值,以获得大于o 30以上的相位裕度r 和较宽的频带(试取不同的K 值,直到满足条件为止)。
要求记录相应的传递函数gk ,并画出Bode 图(见图1)。
传递函数gk= ? 。
-1-0.500.51M a g n i t u d e (d B)1010-1-0.500.51P h a s e (d e g )Bode DiagramFrequency (rad/sec)图 1④仿真验证键入命令:sys=feedback(gk,1) %显示系统单位反馈的闭环的传函。
step(sys) %显示系统的阶跃响应。
记录单位反馈的闭环的传递函数:sys=?,观察并绘出阶跃响应图,了解响应速度、超调量等性能指标,分析系统稳定性。
阶跃响应图四实验报告要求1、绘出各种情况下的Nyquist图、Bode图,判定系统稳定性。
2、分析系统开环增益K对系统的动态性能及稳定性的影响。
3、利用系统波特图对控制系统性能进行分析。
4、结合实验过程中遇到的问题谈谈对实验的看法。
实验四 控制系统及校正实验一 实验目的1、学习系统串联校正的设计和原理。
2、掌握控制器对系统的动静态性能影响的分析方法。
3、了解控制器参数对控制质量的影响。
二 实验内容单位反馈待校正对象为一个大惯性)1(1+s T m 环节串小惯性)1(1+s T l环节的系统,要求对该系统分别采用P 、PI 控制器的串联校正,分析系统的跟随性能。
三 实验方法及步骤1、建立仿真模型仿照实验一所述的方法建立如下的仿真系统:m l )设为0,幅值(Final value )为1。
2、比例控制器(P )研究将控制器设为比例控制器,其传函为c G (s)=p K ,分别取p K =5和10,启动仿真,双击打开示波器观察波形,研究它的跟随性能,分析参数p K 变化对系统动静态性能的影响。
用“局部放大镜”放大读数功能,求出输出信号的稳态误差,并作记录(见表1)。
2.1 输出波形(p K =10)2.2 数据记录(表1)3、比例积分控制器(PI)研究将控制器设为比例积分控制器,其传函为s sKsGc p) 1() (+=,其中pK分别取3,5,7 。