基于ADAMS软件的摆动导杆机构的运动学分析
基于ADAMS的摆动导杆间歇急回机构的参数化建模分析

Key words: AD AM S, T he sw ing leads pole imit ation, Parameter modeling analysis
在机构设计中, 要求机构的从动件必须满足某 种运动规律, 这就需要对机构进行必要的运动分析。 常规的分析方法是图解法和解析法。但是, 前者的 设计精度低; 后者的计算工作量大, 必须借助计算机 编程处理。如果借 助 ADAM S之间是否干涉, 执行件的运动是否与期望的相符; 通过参数化建模 分析及优化设计, 可以优化机构的设计方案, 大大提 高机构分析设计的效率。
建立测 量。在 Adam s/ V iew 的 测量命令 中添 加对滑块 C 的测量。在特征选项 中可选择 CM 位 移、CM 速度、CM 加速度等测量工具。 3. 2 参数化分析 3. 2. 1 参数化摆动导杆间歇机构
对样机几何形体进行参数化处理的最简单的方 法是对特殊点进行参数化处理。首先, 根据样机几 何结构的特点, 设置若干点, 这些点定义了一些特殊 的位置, 是构造其他几何形体的基准点; 然后利用这 些点产生一些新的构件, 或者将已有的构件同新创 建的点关联, 当这些特殊点的位置改变时, 与其相关 联的几何形体也将自动更新。因此, 如果将点的坐 标进行参数化处理, 则可以在一定程度上实现样机 几何形体的参数化建模。
1 参数化建模分析简介
ADAM S 提供了强大的参数化建模功能。在创
建模型时, 根据分析需要, 确定相关的关键变量, 并 将这些关键变量设置为可以改变的设计变量。在分 析时, 只需要改变这些设计变量值的大小, 虚拟样机 模型就会自动更新。如果需要根据事先确定好的参 数进行仿真, 可以由程序预先设置好一系列可变的 参数, ADAMS 自动进行系列仿真, 以便于观察不同 参数值下样机性能的变化。Adam s/ View 提供了参 数化点坐标、使用设计变量、参数化运动方式和使用 参数表达式 4 种参数化的方法。用户可以方便的修 改参数化的模型, 不用考虑模型内部的关联变动, 而 且可以达到对模型进行优化的目的。
基于ADAMS的多杆机构运动仿真分析

基于ADAMS的多杆冲压机构运动仿真分析摘要:使用Adams软件可以对多杆机构进行建模和运动仿真分析,同时得出从动件的各类运动参数。
本文建立了一个简化的齿轮多杆冲压机构的模型,进行了运动仿真,对执行机构的重要参数并进行了测量和分析,判断该机构的运动是否满足加工特性,为以后该类机构的设计工作积累经验。
关键词:运动仿真分析;齿轮多杆机构;Adams1引言连杆机构是许多机械上都广泛使用的运动机构。
它的构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,有着显著的优点如:运动副单位面积所受压力较小,且面接触便于润滑,故磨损减小;制造方便,易获得较高的精度和较大的机械效益等。
故一般的锻压加工,冲压加工,插齿加工等都采用了多杆机构的设计。
本文分析的冲压机构在冲制零件时,冲床模具必须先以较大速度冲击样坯,然后以均匀速度进行挤压成型,模具快速将成品推出型腔,最后,模具以较快速度完成返回行程。
图1为本文冲压机构简图。
图1 齿轮冲压机构简图2冲压主运动机构及其工作原理齿轮多杆机构的如图1所示,构件1、2为齿轮配合,齿轮1由电机驱动,连杆3连接大齿轮和4、5、6组成的曲柄滑块机构,当主动齿轮1转动时,从而实现滑块6(冲床模具)的直线往复运动。
3机构的建模与仿真3.1 建模参数的确定在简图1中,设原动件1匀速转动(m=2,z1=20,w=60r/min),齿轮(2m=2,z2=45),各杆件长度为l3=80mm,l4=150mm,l5=98mm。
3.2模型的建立①通过杆长条件,确立了初始位置的8个点的坐标,通过Adams中的Table Editor写入如图3.1图3.1 初始位置各构件端点坐标写入后的各端点建模如图3.2图3.2 端点位置确定②在POINT_1和POINT_7处分别建立大小齿轮的模型选择Main Toolbox中的圆柱模块,分别以分度圆直径40mm、90mm,厚度10mm建立齿轮模型,选择工具,对其翻转,使其在Front面显示为图3.4。
基于AMAMS 四连杆机构运动学分析

摘要利用计算机对机械设计的必然趋势。
该文简述利用机构设计与分析软件ADAMS对曲柄连杆进行设计与分析。
仿真得到的机构运动学特性,与理论计算结果吻合较好,可为曲轴连杆的优化和改进设计提供依据。
关键词:机构分析、曲柄连杆、ADAMS软件目录摘要 (1)一、工程背景 (3)1.1研究对象简介 (3)1.2ADMAS软件 (3)二、四连杆机构原理 (5)2.1基本概念 (5)2.2 平面四杆机构的基本特性 (5)2.2.1曲柄存在条件 (5)2.2.2急回特性及行程速比系数K (6)2.2.3压力角和传动角 (8)2.2.4 死点 (9)三、ADAMS求解动力学基本原理 (10)3.1AMAMS求解原理 (10)3.2仿真计算过程 (11)四、仿真模型建立 (13)五、仿真结果与分析 (15)参考文献 (20)一、工程背景1.1研究对象简介四连杆机构在通用机械、纺织、食品、印刷等工业领域有着广泛的应用,是机构运动弹性动力学的一个主要研究对象。
连杆机构高速运行时,在外力与惯性力作用下,构件会发生不可忽略的振动。
为提高轨迹精度,减小振动,使机构能够准确、高效的工作,必须对这种有害的振动响应加以控制。
目前基于四连杆机构振动特性分析的机构运动弹性动力学研究正日趋完善,但如何改善机构的动态特性,有效地抑制弹性机构的有害振动,是机构学界面临的一个重要的研究课题。
1.2ADMAS软件ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc。
)开发的虚拟样机分析软件。
目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。
根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元,占据了51%的份额。
ADAMS软件使用交互式图形环境和零件库,约束库,力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学,运动学和动力学分析,输出位移,速度,加速度和反作用力曲线。
ADAMS运动学分析

ADAMS运动学分析简介ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于进行多体动力学仿真分析的软件。
它是一种基于动力学原理的分析方法,可以用于研究物体的运动与力学关系。
本文档将介绍ADAMS软件的运动学分析功能,并提供一些使用指南。
运动学分析的定义运动学分析是指研究物体运动的位置、速度和加速度等基本特征的分析方法。
ADAMS通过求解物体的运动方程,从而得到物体在运动过程中的位置、速度和加速度等参数。
运动学分析的基本步骤进行运动学分析通常需要以下几个基本步骤:1.建模:首先需要将待分析的物体建模,并定义其运动学参数,如位置、速度和加速度。
2.添加约束:在ADAMS中,可以通过添加约束来定义物体之间的关系,如连接、限制等。
这些约束可以限制物体的运动方式,从而简化分析过程。
3.定义运动:在ADAMS中,可以通过定义初始条件和施加力来模拟物体的运动。
初始条件可以包括物体的初始位置、速度和加速度,而施加的力可以模拟外部作用力、约束力等。
4.运行仿真:通过设置仿真参数,如仿真时间和步长,来运行仿真模拟。
ADAMS会根据模型和参数进行计算,并输出物体的运动学参数。
5.分析结果:仿真完成后,可以通过ADAMS提供的结果分析工具来查看模拟结果,如位置、速度和加速度等。
ADAMS运动学分析的特点ADAMS作为一款专业的多体动力学仿真软件,具有以下特点:1.精确性:ADAMS采用高精度的求解方法,可以准确地求解物体的运动学方程,从而得到准确的运动学参数。
2.灵活性:ADAMS提供了丰富的建模和约束选项,可以灵活地建立各种复杂的物体模型,并定义各种约束关系。
3.可视化:ADAMS提供了直观的可视化界面,可以对模型进行可视化操作,并实时显示仿真结果。
4.可扩展性:ADAMS支持多种扩展模块和接口,可以与其他CAE软件和编程语言进行集成,方便进行进一步分析和开发。
基于adams的摆环机构运动仿真及优化设计
基于adams的摆环机构运动仿真及优化设计:
摆环机构是一种基本的机械运动装置,它具有结构简单、节省空间、运动可靠性高等
特性,被广泛应用于机床、注塑机等多个机械工程。
Adams是用于机械系统动力学仿真的一种软件,它可以用来仿真摆环机构的运动时响应特性,为优化设计提供了有效支持。
Adams能够仿真摆环机构流程和多个运动参数之间的相互作用,可以准确表示摆环机
构运动变化,是实现摆环机构优化设计的重要工具。
举例来说,Adams能够根据摆环机构
内部参数计算两个自由度的力学链条参数,并计算其运动特性,为给定的摆环机构结构指
定精确的位置。
此外,由于Adams可以模拟摆环机构内部多个参数之间的相互影响,因此
能够准确预测摆环机构的运动变化。
Adams的优势还可以体现在优化设计中。
借助于Adams,我们可以从一系列不同的输
入参数,其中包括质量、运动参数、力学链条等参数,寻求摆环机构最优解。
Adams还可
以模拟出足够精确的摆环机构运动轨迹,利用这些模拟数据来确定新的摆环机构结构及运
动参数的一系列范畴,通过这种设计也可以实现优化设计的效果。
另外, Adams还可以实现精确模拟,以及流体动力学分析等多种功能,同时也可以进行参数优化和对比分析,根据收集的实际数据,快速验证摆环机构的结构参数和运动参数,从而可以更有效地实现优化设计,提高生产效率。
总之,Adams可以用于摆环机构的仿真和优化设计,其准确的运动仿真和多功能优化
支持使得摆环机构可以更加精确的满足设计要求,从而提升设计效率。
摆动导杆机构运动特性分析
摆动导杆机构运动特性分析作者:陶军张楷强来源:《科技创新导报》 2014年第35期陶军张楷强(沈阳理工大学机械工程学院辽宁沈阳 110159)摘要:该文研究了摆动导杆机构的行程速比系数及影响因素,计算了相关运动参数。
研究结果表明,行程速比系数K主要与曲柄长度有关,行程速比系数K随曲柄长度的增大而增大,曲柄越长,行程速比系数K值越大,即机构的急回运动越明显,急回特性受到运动稳定性的影响;随着极位夹角的增大,输出滑块的工作行程速度平稳性略有好转。
应用ADAMS软件对摆动导杆机构进行了运动仿真分析,得到了摆动导杆机构的运动线图,并应用ZNH-B型连杆机构实验台对急回特性的理论分析进行了实验验证,表明该文运动参数的选取是合理的。
关键词:摆动导杆机构急回特性极位夹角行程速比系数中图分类号:TP311 文献标识码:A 文章编号:1674-098X(2014)12(b)-0081-02摆动导杆机构是在曲柄滑块机构中将曲柄作为机架演化而来的,将曲柄的连续回转运动转化为导杆的往复摆动,故称为摆动导杆机构。
摆动导杆机构在牛头刨床、插床、低频振动攻丝机和缆线爬行机器人[1-3]等机构中得到了广泛的应用,对其运动参数进行分析研究,对于优化设计摆动导杆机构,提高工作效率具有重要意义。
该文研究了摆动导杆机构的急回特性及影响因素,应用ADAMS软件对其进行了运动仿真分析,并应用ZNH-B型连杆机构实验台对运动参数的合理性进行了实验验证。
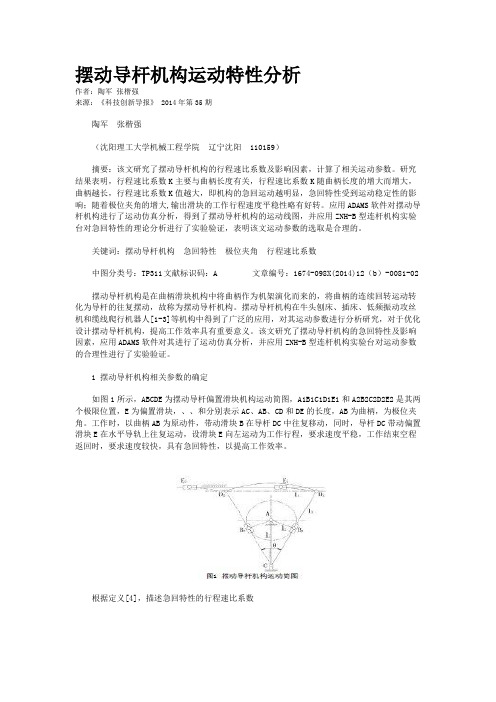
1 摆动导杆机构相关参数的确定如图1所示,ABCDE为摆动导杆偏置滑块机构运动简图,A1B1C1D1E1和A2B2C2D2E2是其两个极限位置,E为偏置滑块,、、和分别表示AC、AB、CD和DE的长度,AB为曲柄,为极位夹角。
工作时,以曲柄AB为原动件,带动滑块B在导杆DC中往复移动,同时,导杆DC带动偏置滑块E在水平导轨上往复运动,设滑块E向左运动为工作行程,要求速度平稳,工作结束空程返回时,要求速度较快,具有急回特性,以提高工作效率。
基于ADAMS的移动导杆机构的动力学分析
本文给出同机分体异步薄板冲压成形工艺的概 念 ,说明并归纳关键技术 。该技术在换热器半片成形 的研究中得到运用 , 证明是一种行之有效的加工方 式 ,尤其是针对小批量生产的中小型企业更为适用 。
参 考 文 献: [ 1 ] 李硕本. 冲压工艺理论与新技术 [M ]. 北京 :机械工
业出版 , 2002. [ 2 ] 肖景容 ,姜奎华. 冲压工艺学 [M ]. 北京 :机械工业出
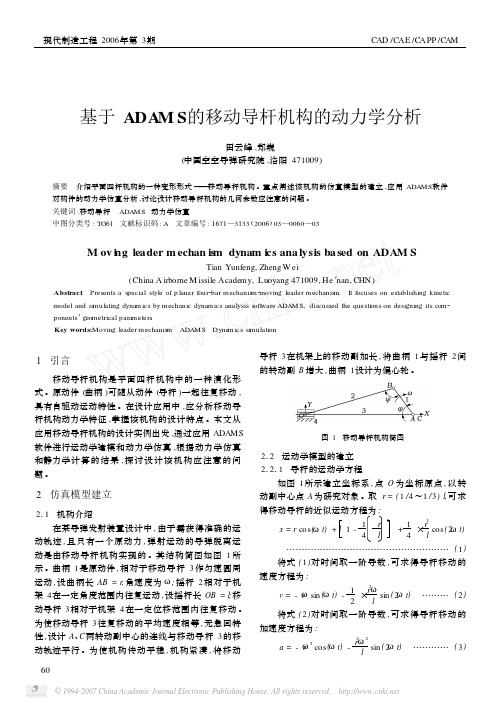
得移动导杆的近似运动方程为 :
x = r cos (ωt) + l 1 - 1 r 2 + 1 ×r2 cos( 2ωt)
4l
4l
……………………………………………… ( 1)
将式 ( 1)对时间取一阶导数 , 可求得导杆移动的
速度方程为 :
v = - ωr sin (ωt) - 1 ×r2ωsin ( 2ωt) ……… ( 2) 2l
图 3 曲柄运动曲线
另外 ,移动导杆的运动是由原动件曲柄 1 直接来 传递动力 ,通过分析可见 ,传动角 Ψ 始终较大 , 即使当 φ = ±90°时 ,也不会出现死点 (Ψ ≠0) , 所以移动导杆 机构有较大的机械效率 。
4 结语
在机构设计过程中 ,应该对机构通过合理的计算 机软件进行动力学分析 ,研究其动力学特征 ,设计合 理的结构 。实践表明 ,移动导杆机构在某型发射装置 的设计应用相当成功 ,使用效果良好 。此外 ,由上面 的分析过程可看出 ,在设计的初始阶段 ,用户不必要 从数学上面对结构的运动学方程及其求解进行繁琐 的分析 、推导和论证 ,运用 ADAM S软件就可对机构进
ep,
2 1
- 1) ln r2 rep, 2
- 1]
…………………
基于ADAMS的摆动导杆间歇急回机构的参数化建模分析
LI Xue a U y ng。 W U at o。LI H o bi H ia U ng n
Pa a ee o dngAn lsso a o eS n ntr i e nd Na t t r g ia in b s d o r m tr M l i ay i fLe d P l wi g I e m t nta sy Reu n Or a z to a e n ADAM S t n
以确定 构件 的运 动情 况 , 即检验 构件 之 间是否 干涉 , 执 行件 的运 动是 否 与期 望 的相 符 ; 过 参 数 化建 模 通 分析 及优 化设计 , 以优 化机 构 的设 计方 案 , 可 大大 提
析时 , 只需 要改 变这 些设计 变 量值 的大小 , 拟样 机 虚
模 型 就会 自动更 新 。如果 需要 根据 事先 确定好 的参 数 进行 仿 真 , 以 由程 序 预 先设 置 好 一 系列 可 变 的 可 参数 , AMS自动进 行系列 仿 真 , AD 以便 于观察 不 同
设 计精 度低 ; 后者 的计 算工 作量 大 , 须借 助计 算机 必 编 程处 理 。如 果 借 助 ADAMS软 件 , 过 仿 真 , 通 可
or nia in a a ge o u n n sg n a re r m e e o t r o la al i o t to ga z in. The p r n e ga z to s t r tf r t r i g ade in a d c r ison pa a t rt u n m de n ysst ha r niato a a l
t r h twe ep s o t a r a ia i n t r smo e n l ssa d e a o a e h tt ea p id v r u l c i e tc n q ec r i s e s t a r a tt h to g n z t u n d l a y i n l b r t d t a h p l it a o a e ma h n e h iu a re o h t o fd sg n t e me h d o e i n,r ie h fii n y o r a ia in d sg n h r e e e in p ro . as d t e e f e c fo g n z t e i n a d s o t n d d sg e i d c o Ke r s ADAM S,Th wi g l a sp l mi t n,Pa a t rmo e i g a ay i y wo d : e s n e d o e i t i a o r me e d l n l ss n
基于ADAMS的六连杆机构的运动学分析论文

基于ADAMS的六连杆机构的运动学分析论文摘要:六连杆机构是一种常见的机械结构,广泛应用于机械工程领域。
本文以ADAMS软件为工具,对六连杆机构的运动学进行了分析。
通过建立六连杆机构的模型,并设置合理的运动学约束条件,可以准确地描述机构的运动规律。
通过对模型进行求解和仿真,可以得到机构各连杆的位移、速度和加速度等关键参数。
通过分析这些参数的变化规律,可以深入理解六连杆机构的运动特性,并为机构的设计和优化提供理论依据。
本文通过对六连杆机构的运动学分析,验证了ADAMS软件在机构分析中的有效性和准确性,对于提高机构设计的效率和可靠性具有重要意义。
关键词:ADAMS;六连杆机构;运动学分析;模型建立;仿真1.引言六连杆机构是一种典型的机械运动结构,具有广泛的应用前景。
在机械工程领域,六连杆机构被广泛应用于发动机、变速器、悬挂系统等装置中。
在这些应用中,准确地分析六连杆机构的运动学特性对于机构设计和优化具有重要意义。
2.模型建立在ADAMS软件中建立六连杆机构的模型是进行运动学分析的第一步。
模型需要包括六个连杆和几个关节。
通过设置适当的约束条件,模拟机构的运动。
通过添加质点和其他物理特性,可以更准确地描述机构的运动。
3.运动学约束条件为了准确地描述六连杆机构的运动,需要设置合理的运动学约束条件。
这些约束条件可以包括连杆的长度、角度、运动范围等。
通过调整这些约束条件,可以模拟机构在不同工况下的运动。
4.求解和仿真通过对六连杆机构模型进行求解和仿真,可以得到机构的位移、速度和加速度等关键参数。
这些参数的变化规律可以直观地反映六连杆机构的运动特性。
通过研究这些特性,可以发现机构的局限性和改进方向。
5.结果分析基于ADAMS软件的运动学分析可以得到六连杆机构的运动规律。
通过分析仿真结果,可以得出结论如下:(1)六连杆机构的运动较为复杂,各连杆之间的相互作用会导致运动规律的改变;(2)约束条件的变化会对机构的运动产生较大的影响;(3)仿真结果和理论计算结果吻合较好,验证了ADAMS软件在机构分析中的准确性和有效性。
基于ADAMS的六连杆机构的运动学分析 论文
基于ADAMS的六连杆机构的运动学分析论文本科毕业设计(论文)学生姓名:院(系):机械工程学院专业班级:机械1004班指导教师:于洋完成时间: 2021 年月日题目:基于ADAMS的六连杆机构的运动学分析西安石油大学本科毕业设计(论文)基于ADAMS的六连杆机构的运动学分析摘要:虚拟样机技术是一种崭新的产品开发技术,其中ADAMS软件是目前最著名的虚拟样机分析软件之一。
本文阐述了虚拟样机技术和ADAMS软件的特点及其应用,以六连杆机构在牛头刨床中的应用为研究对象,对其进行动力学分析。
主要运用我们学习过的机械原理和理论力学知识对机构进行运动学和动力学的相关理论计算;利用ADAMS软件在图形显示方面的优势,采用其基本模块ADAMS/View(界面模块) 和ADAMS/PostProcessor(后处理模块)进行一系列建模、运动分析和动态模拟仿真工作。
验证模型的正确性,并对机构在整个周期内的可行性进行计算分析,记录相应信息,输出所需要的位置、速度、加速度、力矩等曲线与理论结果比较,充分展现虚拟样机技术与物理样机比较之下的优越性,为虚拟样机技术的深入研究打下基础。
关键词:ADAMS;六连杆机构;运动学分析;仿真西安石油大学本科毕业设计(论文)The Kinematic Analysis of Six Bar Linkage based on ADAMSAbstract:Virtual prototyping technology is a new product development technology, and software ADAMS is one of the most famous virtual prototype analysis software software. This article expounds the characteristics and application of virtual prototype technology and ADAMS software, chose the application in six bar linkage as research body and do some dynamics analysis. Mainly use the knowledge of mechanical principle and the theory of mechanical we have already learned, kinematics and dynamics of mechanism related to the theoretical calculated. Using ADAMS software in graphic display advantages andusingthebasicmoduleofADAMS/View(interfacemodule)andADAMS/PostProcessor (post-processing module) to a series of modeling, motion analysis and dynamic simulation work. To prove the validity of the model and the feasibility of institutions in the whole cycle calculation analysis, record the corresponding information, output the required position, velocity, acceleration, torque curve compared with theoretical results, such as to fully demonstrate the virtual prototype technology and the superiority of physical prototype, lays the foundation for the further study of virtual prototype technology.Keywords:ADAMS ,Six Bar Linkage, Kinematic Analysis, Smulation目录1 绪论 ........................................................................... (1)1.1 虚拟样机技术及其研究现状 ........................................................................... (1)1.1.1 虚拟样机技术的基本概念 (1)1.1.2 虚拟样机技术的应用及其特点 ............................................................... 1 1.1.3 虚拟样机技术的研究现状与发展趋势 ................................................... 2 1.2 ADAMS软件 ........................................................................... . (3)1.2.1 ADAMS软件简介 ........................................................................... ......... 3 1.2.2 ADAMS软件的模块 ........................................................................... ..... 4 1.2.3 ADAMS软件的特点 ........................................................................... ..... 4 1.2.4 ADAMS软件的应用 ........................................................................... ..... 4 1.3 连杆机构概况 ........................................................................... . (5)1.3.1 连杆机构及其传动特点 ...........................................................................5 1.3.2 平面六杆机构的分类 ........................................................................... .... 6 1.4 课题研究的内容与目的 ........................................................................... ........... 6 2 六连杆牛头刨床机构的相关特性分析 (7)2.1 六连杆牛头刨床工作原理和要求 (7)2.2 机构运动学分析 ........................................................................... .. (7)2.2.1 机构的自由度与行程速度比 ................................................................... 8 2.2.2 用矢量方程图解法在右极限处作机构的速度分析 . (8)2.2.3 用矢量方程图解法在右极限处作机构的加速度分析 .........................11 2.3 机构的动力学分析 ........................................................................... .. (15)2.3.1 惯性力的计算 ........................................................................... .............. 15 2.3.2 惯性力偶矩 ........................................................................... .................. 15 2.3.3 拆分杆组 ........................................................................... ...................... 16 2.3.4 机构受力分析 ........................................................................... .. (16)2.4 小结 ........................................................................... ................................................. 18 3 基于ADAMS的六连杆机构的建模与仿真 ...............................................................193.1 工作环境设置 ........................................................................... ......................... 19 3.2 创建模型 ........................................................................... (19)3.2.1 求特殊位置时各点的坐标 (19)3.2.2 用ADAMS创建各构件 .........................................................................20 3.3 Body特性修 (21)Ⅰ西安石油大学本科毕业设计(论文)3.3.1 曲柄1和滑块2的质量、转动惯量修改 ............................................. 21 3.3.2 摇杆3、连杆4和滑块5的质量与转动惯量修改 .............................. 21 3.4 添加约束和驱动 ........................................................................... (21)3.4.1 添加约束 ........................................................................... ...................... 22 3.4.2 添加驱动 ........................................................................... ...................... 23 3.5 施加载荷 ........................................................................... ................................. 24 3.6 模型仿真 ........................................................................... (24)3.6.1 模型验证 ........................................................................... ...................... 24 3.6.2 简单仿真与动画回放 ........................................................................... .. 25 3.6.3 模型测量 ........................................................................... ...................... 26 3.7 小结 ........................................................................... ......................................... 27 4 仿真结果分析 ........................................................................... (29)4.1.1 ADAMS/PostProcessor简介 .................................................................. 29 4.1.2 由仿真结果绘制曲线图的类型 ............................................................. 29 4.2 仿真结果曲线图与分析比304.2.1 曲柄1(PART_2) .................................................................... .................. 30 4.2.2 滑块5((PART_6) ................................................................... ............... 32 4.3 小结 ........................................................................... ......................................... 33 5 总结 ........................................................................... .................................................... 35 参考文献 ........................................................................... .................................................. 36 致谢 ........................................................................... (37)Ⅱ感谢您的阅读,祝您生活愉快。
基于ADAMS的曲柄摆杆机构的运动分析

基于ADAMS的曲柄摆杆机构的运动分析作者:程熊豪来源:《科技资讯》 2015年第2期程熊豪(武汉理工大学物流学院湖北武汉 430063)摘要:曲柄摆杆机构能将旋转运动转换为直线运动,常常作为动力源(如旋转式电动机)与直线运动形式的执行机构,是现代机械设备中一种十分常见的核心执行装置。
针对某工程中曲柄摆杆机构设计中的运动学问题,基于ADAMS仿真软件建立了曲柄摆杆机构的虚拟样机模型,并对虚拟样机模型进行运行学特性分析与仿真,分析了作为执行机构的滑块上工作点的位移、运动速度和加速度变化规律,得出作为动力输入曲柄的驱动力矩曲线,从而为曲柄摆杆机构的结构设计和控制系统的设计提供参考。
关键词:曲柄摆杆运动分析 ADAMS 机构中图分类号:TH112 文献标识码:A 文章编号:1672-3791(2015)01(b)-0014-02曲柄摆杆机构具有构件形状简单、加工方便、可承受较大载荷等诸多优点,因此,曲柄摆杆机构在现代机械设备中有着非常广泛的应用。
该机构可以将周期转动的运动形式转化为直线运动,而且具有结构简单、制造容易、工作可靠等优点,因此在工程中得到了广泛的应用。
最典型的是牛头刨床机构。
但是,传统的曲柄摆杆机构设计多采用图解法或实验法,其过程复杂繁琐、设计周期长、稳定性差、精度不高,难以达到设计要求。
尽管采用解析法可以得到较高的计算精度,但该方法存在推导公式复杂,计算工作量大,且获得的结果过于抽象,达不到形象直观的要求。
ADAMS是机械系统动态仿真软件的应用软件,用户可以运用该软件非常方便地对虚拟样机进行静力学、运动学和动力学分析,可视化地输出位移、速度、加速度和反作用力曲线。
通过ADAMS软件对曲柄摆杆机构进行运动学分析,能够克服图解法分析过程复杂、精度低等问题。
针对某一项目,利用曲柄摆杆机构的滑块作往复直线运动的功能,实现滑块到达目标位置后可以回到初始位置的基本动作。
同时,设计曲柄摆杆机构时需要对其进行运动分析,以判断能否完成所需动作要求。
基于ADAMS的平面五杆机构运动学及动力学仿真研究
基于ADAMS的平面五杆机构运动学及动力学仿真研究摘要:平面五杆机构是一种常见的机械系统,广泛应用于工程领域,例如机械手臂、发动机连杆机构等。
本文基于ADAMS软件对平面五杆机构的运动学及动力学进行了仿真研究。
通过建立五杆机构的几何模型和连接条件,并设置适当的约束和驱动方式,实现了五杆机构的运动学分析。
进一步,在给定质量和惯性参数的情况下,对五杆机构进行动力学仿真,分析了其运动时的力学特性。
研究结果表明,ADAMS可以有效地对平面五杆机构的运动学和动力学特性进行仿真和分析,对于机构的设计和优化具有重要的参考价值。
关键词:平面五杆机构;ADAMS;运动学;动力学;仿真研究1.引言平面五杆机构是一种由五个连杆组成的机械系统,其具有很多特点,如结构简单、运动灵活等,因此在工程领域中得到了广泛的应用。
平面五杆机构的运动学和动力学分析是对其性能进行研究和评估的基础,而ADAMS是一种广泛应用于机械系统仿真研究的软件工具,具有强大的分析和模拟功能。
因此,基于ADAMS的平面五杆机构的运动学和动力学仿真研究具有重要的工程应用价值。
2.建立几何模型和连接条件为了进行平面五杆机构的仿真研究,首先需要建立五个连杆的几何模型,并设置合适的连接条件。
在ADAMS中,可以通过绘制连杆的工作体积和各连杆之间的连接点来建立几何模型,并设置连杆之间的接触和连接条件。
3.运动学仿真分析通过设定适当的约束和驱动方式,实现平面五杆机构在运动学模拟中的自由运动。
在仿真过程中,可以观察连杆的位移、速度和加速度等参数的变化,以及连杆之间的相对运动关系。
通过对机构的运动学分析,可以评估其运动的平滑性和有效性。
4.动力学仿真分析在给定平面五杆机构的质量和惯性参数的情况下,进行动力学仿真研究。
通过施加适当的输入扭矩或力矢量,观察连杆受力的变化,分析机构的力学特性,如力矩、功率等,从而评估机构的运动性能。
5.结果分析与讨论通过ADAMS的仿真分析,得到平面五杆机构在不同工况下的运动学和动力学特性数据。
基于ADAMS软件的摆动导杆机构的运动学分析

K inema tics Ana lysis of O sc illa ting2Gu ide2Bar M echan ism w ith ADAM S Software
ZHAN G Q ing2gong, MA X iao2li, ZHOU Zhao2zhong
( School of M echanical and Electrical Engineering, W est B ranch of Zhejiang University of Technology, Quzhou 324000, China)
[研究 ·设计 ]
张庆功 ,等 基于 ADAM S软件的摆动导杆机构的运动学分析
表 1 摆动导杆机构运动模型约束映射表
约束副
相关构件
固定副 转动副 1 转动副 2 转动副 3 移动副
机架 曲柄 、机架 曲柄 、滑块 导杆 、机架 滑块 、导杆
· 39 ·
3 仿真分析 建好 模 型 后 , 在 ADAM S /V iew 中 调 用 ADAM S /
收稿日期 : 2008202201 作者简介 :张庆功 (1972 - ) ,男 ,湖北天门人 ,硕士 ,讲师 ,研究方向为虚拟样机技术 、先进制造技术 。
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
摘 要 :针对图解法和解析法分析四杆机构运动规律暴露出的问题 ,提出了采用 ADAM S软件对四杆机构进行运动学分 析的观点 。以摆动导杆机构为例 ,详细介绍了整个分析过程 。结果表明 ,使用 ADAM S软件分析四杆机构运动规律 ,操 作过程简单明了 ,仿真结果可信 。 关 键 词 :摆动导杆机构 ; ADAM S软件 ;运动学仿真 中图分类号 : TH112. 1; TP391 文献标志码 : A 文章编号 : 100522895 (2008) 0520038202
机构优化设计综合实验报告 摆动导杆机构

机构优化设计综合实验报告摆动导杆机构一、实验目的1. 掌握机构优化设计流程及方法。
2. 熟悉MATLAB/Simulink等工具的简单使用。
3. 熟悉自动化设计软件ADAMS的使用方法。
4. 熟悉建模、仿真、分析和优化机构的基本思路和操作方法。
二、实验内容1. 摆动导杆机构的静态分析。
2. 建立摆动导杆机构的动力学模型。
3. 利用ADAMS进行动力学仿真。
4. 对机构进行优化设计,得到最优参数。
三、实验步骤1. 绘制摆动导杆机构的CAD图。
2. 利用SolidWorks进行三维建模。
3. 利用MATLAB编写静态分析程序,计算机构受力情况。
4. 建立机构的动力学模型,并将其导入ADAMS中。
5. 进行动力学仿真,得到机构运动情况。
6. 对机构进行优化设计,对比不同参数下的机构运动性能。
7. 分析优化结果及改进方向。
四、实验原理摆动导杆机构是一种广泛应用于工业和机械设计领域的机构。
该机构由固定主架、摆杆、导杆和从动架等组成,可以将旋转运动转化为直线运动。
同时,该机构结构简单、工作可靠、制造成本低、使用寿命长,因此得到广泛应用。
在进行机构优化设计前,需要对机构进行静态分析。
通过计算机程序模拟机构在不同外载荷作用下的受力情况,可以得到机构的力学特性,为优化设计提供数据支持。
在建立机构的动力学模型时,需考虑机构的受力情况、牵引质量以及摩擦等因素。
将机构的动力学模型导入ADAMS中,进行动力学仿真,可以得到机构的运动情况。
同时,可利用ADAMS进行优化设计,通过对比不同参数下的机构运动性能,得出最优解。
五、实验结果及分析经过静态分析程序计算,可以得到机构在不同外载荷下的受力情况。
例如,在机构受到10N的外载荷时,导杆处受到的最大压力为300N,摆杆的最大弯曲角度为5度。
这些数据可以为优化设计提供数据支持。
在进行动力学仿真时,可得到机构在不同的牵引质量下的运动情况。
例如,在牵引质量为100G的情况下,机构的运动速度最大,机构的平均运动速度为0.5m/s。
机构优化设计综合实验报告摆动导杆机构资料.doc

机构优化设计综合实验报告学号: 姓名: 班级: 成绩:同组实验同学: 实验日期: 指导教师:1. 实验目的:学习在ADAMS软件平台上建立摆动导杆机构的参数化仿真模型,并对该机构模型进行运动学、动力学分析和机构的优化设计。2. 实验内容:摆动导杆机构是一种应用十分广泛的典型机构,如下图所示。该机构工作时,曲柄为原动件,匀速转动,滑块2为执行构件,做往复直线运动。滑块2从左向右运动时称为工作行程,此时要求速度较低并且均匀;滑块2从右向左运动时称为空回行程,此时要求速度较高,以提高工作效率。为此,该机构应具有急回特性。另外,滑块2在工作行程中,受到阻力F P的作用,而在空回行程中则不受阻力作用。已知:曲柄的转速为n(r/min),各构件的尺寸、质心位置和质量;导杆绕质心的转动惯量J S 及阻力F P的变化规律;滑块2的导路位于导杆端点B所做圆弧高的平分线上。要求: (1)建立摆动导杆机构运动尺寸的数学模型;(2)建立摆动导杆机构的参数化仿真模型;(3)对机构进行运动学和动力学仿真分析;(4)对机构进行设计研究和优化设计。3. 实验参数:方案号导杆机构的运动学分析导杆机构的动力学分析n/(r/min)l P1P2/mml P1P6/mml P2P3/mmλ/mmm导杆/kgm滑块2/kgF Pmax/NJ S导杆/kgm^21 60 380 110 540 0.25 20 70 7000 1.1其中,l P3P9=λl P2P3,曲柄、滑块2和连杆的质量均为0,导杆质心点位于0.5l P2P3处4. 实验结果;(1) 机构在左极限位置时,在直角坐标系下的建模过程,即机构各点的坐标表达式。设计点Loc_X Loc_Y Loc_ZPOINT_1 0.0 0.0 20.0POINT_2 0.0 DV_M_P2_Y 0.0POINT_3 DV_M_P3_X DV_M_P3_Y 0.0POINT_4 DV_M_P4_X DV_M_P4_Y 0.0POINT_5 DV_M_P5_X DV_M_P5_Y 0.0POINT_6 DV_M_P6_X DV_M_P6_Y 20.0POINT_7 DV_M_P7_X DV_M_P7_Y 0.0POINT_8 DV_M_P8_X DV_M_P8_Y 0.0POINT_9 DV_M_P9_X DV_M_P9_Y 0.0POINT_10 DV_M_P9_X + 30 DV_M_P9_Y -10.0(2)滑块2质心点的位移、速度和加速度曲线。(3)导杆的角速度和角加速度曲线。(4)阻力曲线、各转动副的受力曲线和曲柄上的平衡力矩曲线。(5)机构优化结果报告。5. 思考题:(1)摆动导杆有没有急回特性?如果有,所设计方案中其行程速度变化系数k为多少?答:有,且k=(180°+θ)/(180°-θ),根据现有数据,得θ=2*α=2*arcsin(11/38)= 33.65°,故k=1.460。(2)对摆动导杆机构进行参数化建模的步骤是什么?答:1.建立设计变量:即建立设计初始参数和建立设计变量;2.建立设计点:在Point Table上创建设计点及其数值或表达式;3.创建运动件:对于本模型,有滑块1、导杆、曲柄、滑块2和连杆;4.创建运动副:即创建相应位置的转动副或移动副;5.给机构施加驱动:在相应位置加驱动力;6.机构仿真:观察其运动情况;7.细化机构仿真模型:即修改质心位置、惯性参数、加力、力的参数化等。(3)在对摆动导杆机构进行优化设计前,为什么要进行设计研究?答:当需要迅速获得一个经过改善的模型,即在对摆动导杆机构进行优化设计前,它应满足机构设计提出的各种要求和所有的必须动作,在满足一定的设计条件下,要对一些变量进行设计方案的研究,从中找出一种方案使机构中各铰链点的支反力达到最小值。故进行设计研究很有必要。(4)试举摆动导杆机构在工程实际中2—3个应用案例。答:1. M6的低频振动攻丝工作台用摆动导杆机构近似替代低频振动攻丝机中的简谐扭振机构,对近似替代的可能性和可行性进行了分析。得出结论:当曲柄长度与机架长度之比小于0.1时,摆动导杆机构可以足够精确地输出正弦函数。给出了该机构在攻螺纹直径为M6的低频振动攻丝工作台中的应用实例。2. 小袋包装机针对我国国内全自动计量杯式小袋包装机上传动系统的不足,提出了摇块式摆动导杆滑槽间歇机构实施量杯旋转盘动停结合,保证计量杯有充足的时间加料和排料;并确定了此机构的基本参数和几何尺寸,还分析了该机构的运动特性.3. 牛头刨床牛头刨床的摆动导杆的机构用于调整滑枕的行程。
基于ADAMS六杆机构分析课案

机械原理课程虚拟样机仿真实验报告题目:基于ADAMS的六杆机构的运动学分析姓名:学号:班级:2016年5月30日基于ADAMS的六杆机构的运动学分析14041034 闫响北京航空航天大学能源与动力工程学院(北京100191)摘要本文主要针对六杆机构,理论分析了该机构各输出构件的位置、速度和加速度的变化规律;并利用ADAMS软件对机构进行了建模仿真,得到了各输出构件的位置、速度和加速度的变化曲线;通过仿真结果与理论分析的比较,验证了理论分析的正确性。
关键词:ADAMS;六杆机构;运动学分析.目录1、题目要求 (1)2、机构位置、速度及加速度方程的求解 (4)2.1 求解C构件位置、速度、加速度(解析法) (4)2.2 求解E构件位置、速度、加速度(解析法) (6)3、ADAMS软件仿真模型的建立及结果分析 (10)3.1仿真模型的建立 (11)3.2仿真结果分析 (11)4、结束语 (13)参考文献: (13)1、题目要求图1已知图1所示六杆机构中,∠CAE = 90°, l AB = 150 mm, l AC= 550 mm, l BD = 80 mm, l DE = 500 mm, w1 = 10 rad/s。
其中,杆件AB为主动件,滑块C和滑块E 为输出构件。
求∠BAE = 45°时构件3的角速度和角加速度和点E的速度和加速度。
图12、机构位置、速度及加速度方程的求解输出构件为构件C与构建E。
应用解析法求解两构件位置、速度、加速度方程。
2.1 求解C构件位置、速度、加速度(解析法)建立如图2所示的坐标系。
因为在ADAMS坐标系中,垂直纸面向外的方向为Z 轴正向,为使其互相吻合,设定向右为正,向左为负。
图23构件的角度(以Y 轴负向为起始,顺时针为正,逆时针为负)22222332222222222313132121)]10cos(3365[)10sin(9240010)10sin()]10cos(3365[924010)10sin()]10cos(3365[334565165)]10cos(3365[)10sin(1033456510)10sin(165)]10cos(3365[)10sin(1033]45)10cos(165[)]10cos(3365[10)10sin(1653)10cos(336545)10cos(165)10cos(6613090)10cos(330)]10sin(3[)]10cos(311[9011)10cos(30)]10cos(311[9011)10cos(30)]10sin(3[)]10cos(311[)]10cos(311[)]10cos(311[9011)10cos(30])10cos(311)10sin(3[11)]10cos(311[)10sin()10sin(330)]10cos(311[)10cos(30])10cos(150550)10sin(150[113])10cos(311)10sin(3arctan[])10cos(150550)10sin(150arctan[])10cos(150550)10sin(150arctan[)10cos(150550)10sin(150cos sin tan )-cos(cos 0sin(sin t t t t t t t t t t t t t t dtd t t t t t t t t t t t t t t t t t t t t t t t dtd t t t t t t t t l l l l l l l l ---=⨯⨯---=⨯⨯-⨯+⨯--=-⨯⨯⨯+⨯⨯⨯--=-⨯⨯⨯---⨯⨯⨯--==---=--=+--⨯⨯-=--⨯⨯⨯+---=--⨯⨯⨯-+-=-⨯⨯⨯--⨯⨯⨯-+-==--=--=--=--=--==+=-+ωαβωβααββαβα构件角加速度:构件角速度:)当∠BAE = 45°时,t 为0.55s :s rad t t srad t t radt t st /65.37)]10cos(3365[)10sin(92400/72.1)10cos(336545)10cos(1650.202842])10cos(311)10sin(3arctan[55.0233-=---=-=---==--==αωβ 2.2 求解E 构件位置、速度、加速度(解析法)E 构建的位置(用横坐标表示):]))10cos(311)10sin(3arctan[6cos(80)10sin(150])])10cos(311)10sin(3arctan[6sin(80)10cos(150[500])10cos(311)10sin(3arctan[10)6cos(80sin 150)]6sin(80cos 150[500)]6sin(80cos 150[500])6cos(80sin 150[500)]6sin(80cos 150[])6cos(80sin 150[2222222222t t t t t t x t t t x x x --⨯+---⨯+⨯-=--==+⨯+-+⨯+⨯-=+⨯+⨯-=-+⨯+-=+⨯+⨯+-+⨯+-ππβαβπαβπαβπαβπαβπαβπα滑块的速度公式与加速度公式过长且过于复杂,化简已意义不大,因此将公式拆分成几个层次,分层次计算,降低计算难度。
基于ADAMS软件的摆动导杆机构的运动学分析
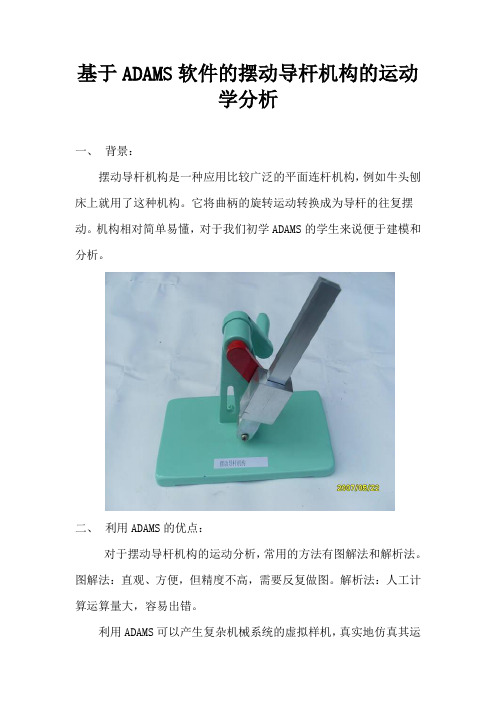
基于ADAMS软件的摆动导杆机构的运动学分析一、背景:摆动导杆机构是一种应用比较广泛的平面连杆机构,例如牛头刨床上就用了这种机构。
它将曲柄的旋转运动转换成为导杆的往复摆动。
机构相对简单易懂,对于我们初学ADAMS的学生来说便于建模和分析。
二、利用ADAMS的优点:对于摆动导杆机构的运动分析,常用的方法有图解法和解析法。
图解法:直观、方便,但精度不高,需要反复做图。
解析法:人工计算运算量大,容易出错。
利用ADAMS可以产生复杂机械系统的虚拟样机,真实地仿真其运动过程。
精确度很高,而且将计算工作交给计算机能省去大量人工,并且不容易出错。
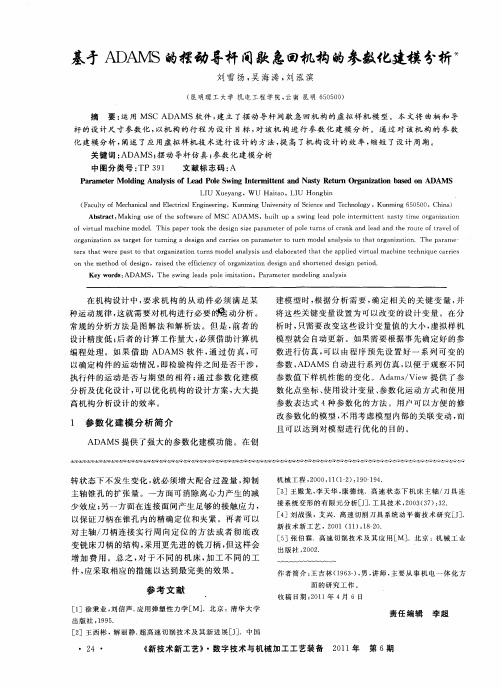
三、建立力学模型:图中为摆动导杆机构曲柄AB为原动件导杆BC为从动件通过滑块B将曲柄AB的连续转动转变为导杆BC的往复摆动。
四、建立样机模型:首先是给定模型具体的参数:各杆的杆长以及曲柄AB的转速。
利用ADAMS建立样机:根据几何关系确定A、B、C三点的坐标,可以假定C为坐标原点从而确定模型。
再各零件之间建立相应的约束副。
固定副:机架转动副1:曲柄、机架转动副2:曲柄、滑块转动副3:导杆、机架移动副:滑块、导杆右图为理论的样机图下图为实际做的时候建立的样机图,比较理论的样机图,我没有专门建立一个杆将其锁为机架,而是直接在坐标轴上建立了2个点,将坐标轴当作了ac杆。
附图如下五、仿真分析:通过已经建立好的模型给出曲柄的转速,就可以利用ADAMS自动输出构件的位移、速度、加速度等详细的参数。
并且利用这些输出值可以通过ADAMS/View以图形形式输出,从而能清晰地看出他们在仿真过程中的变化规律。
六、具体参数:W=5rad/s AB(主动件)=100mm AC(固连机架的杆)=350mm七、输出图:本图为滑块的位移图。
图中红色线为x方向的位移。
蓝色线为y方向的位移,合成图为一直线。
从图中可以看出滑块进行往复运动,轨迹为一个圆。
本图为滑块的速度图。
图中红色线为x方向的速度。
蓝色线为y方向的速度,合成图为一直线。
基于ADAMS并联机构摇摆台运动学和动力学仿真

基于ADAMS并联机构摇摆台运动学和动力学仿真ADAMS并联机构摇摆台是一种具有高精度和稳定性能的摇动平台,可以被广泛应用于医学、航空、军事等领域。
本文将基于ADAMS仿真软件,对ADAMS并联机构摇摆台的运动学和动力学特性进行分析和研究。
1、运动学分析运动学是研究对象的运动规律和运动形态的科学。
对于ADAMS并联机构摇摆台的运动学分析,我们需要将其建立为ADAMS仿真模型。
通过对各个连接点的运动学参数进行建模,可以计算出摇摆台在不同运动条件下的运动规律和运动形态。
2、动力学分析动力学是研究物体受力或加速度变化的科学。
对于ADAMS并联机构摇摆台的动力学分析,我们需要考虑机器的质量、瞬时速度和加速度等因素。
通过对机器的各个部分进行动力学建模,可以计算出机器的运动状态和运动特征。
3、仿真分析仿真分析是一种基于计算机建模和仿真技术对对象进行分析的方法。
在对ADAMS并联机构摇摆台进行仿真分析时,我们需要将其建立成ADAMS模型,并对模型进行运动学、动力学模拟,以模拟机器的真实运动情况,进而分析其性能特点。
4、结论基于ADAMS仿真软件,我们可以对ADAMS并联机构摇摆台进行运动学和动力学仿真分析。
通过对其运动规律和运动特征进行研究,可以为机器的设计和优化提供重要参考依据,并可为其应用于不同领域和场合提供更好的解决方案。
相关数据可以是多种形式的,比如实验数据、统计数据、市场数据等等。
以下以市场数据为例,进行分析。
以某电商平台上某商家销售的商品数据为例,可以得到以下数据:- 商品类别:家用电器- 商品数量:10000件- 平均价格:500元- 最高价格:1500元- 最低价格:200元- 月销售额:500万元以上数据可以帮助我们对该商家的销售情况进行初步的分析。
首先,商品数量较大,但平均价格不高,说明该商家的家用电器属于普及型或中档型商品,适合大众消费。
同时,最高价格在1500元以下,最低价格为200元,说明该商家的商品价格区间较为均衡,较为符合消费者的消费能力和需求。
基于ADAMS的六杆机构运动学及动力学仿真分析

基于ADAMS的六杆机构运动学及动力学仿真分析吕鲲;袁扬【摘要】To make a six-bar mechanism of shaper to be more reasonable,a kinematic model of six-bar mechanism of shaper was established with the vector analytic method and the kinematic analysis was carried out by the simulation software ADAMS.The simulation results reveal the curves of plough head's displacement,velocity and acceleration.Then the mathematical movement model of dynamics of the six-bar mechanism of shaper was established with the isolated body method and the dynamical simulation analysis on the model was carried out by the simulation software ADAMS.The force information of each component and the balance moment of the actuator are drawn from the results of simulation.Finally,by comparing the simulation results with theoretical calculation,its simulation results were verified.This simulation method with ADAMS provides a theoretical reference for the actual mechanism design.%为了使牛头刨床六杆机构设计更加合理,运用矢量解析法建立牛头刨床六杆机构运动学模型,并运用ADAMS软件对其进行运动仿真,得出牛头刨床刨头的位移、速度和加速度随时间变化的规律曲线.用分离体法建立该六杆机构的动力学模型,并运用ADAMS软件对其进行动力学仿真分析,获得各构件的受力情况和原动件的平衡力矩,为机构的优化设计提供了理论参考.【期刊名称】《河南理工大学学报(自然科学版)》【年(卷),期】2012(031)005【总页数】6页(P555-560)【关键词】ADAMS;六杆机构;动力学【作者】吕鲲;袁扬【作者单位】河南理工大学机械与动力工程学院,河南焦作454000;河南理工大学机械与动力工程学院,河南焦作454000【正文语种】中文【中图分类】TH113.220 引言牛头刨床是金属切削类机床中刨削类机床的一种,主要用于单件小批量生产,加工平面、成型面和沟槽等.工作原理为当主动件曲柄匀速转动时,摇杆左右摆动,带动刨刀沿着固定的轨迹运动,实现将回转运动转化为直线往复运动的功能.牛头刨床机构具有急回特性,即刨刀在切削工作行程中速度较慢,且要求平稳,切削完成后快速空载返回到原来的位置.因此,对速度平稳性的影响难以凭经验判断.为了确定刨刀运动是否满足要求,就必须对其进行仿真分析.以往对牛头刨床六杆机构进行研究主要从运动学或参数优化进行分析.其中,文献[4-5]分别论述了用ADAMS和SIMULINK建立牛头刨床仿真模型的过程,并对其进行了运动学仿真.文献[6]利用ADAMS建立了锁紧臂机构的动力学模型,并对其进行了参数化分析研究,进而实现了机构的优化设计.文献[7]利用ADAMS对空气捻结器剪切机构进行运动学仿真分析,验证了凸轮连杆机构的可行性和合理性,同时也为空气捻结器剪切机构优化设计提供了理论依据.文献[8-9]分别对牛头刨床机构进行了动力学分析,建立了动力学模型,并对其进行了动力学仿真,为机构动力学参数优化提供依据.文献[10]对机械式压力机曲柄六杆机构进行了运动学特性分析,建立了数学模型并通过仿真进行了对比,为机构进一步分析奠定了基础.本文以比较典型的六杆机构牛头刨床为例,运用矢量解析法和矩阵法建立六杆机构的运动学及动力学模型,利用ADAMS软件强大的动力学分析功能,对牛头刨床六杆机构进行动力学仿真.1 运动学分析1.1 数学模型的建立牛头刨床六杆机构的运动简图如图1所示.已知l1=125 mm,l3=600 mm,l4=150 mm,l5为从动件,设构件3,4,5的质量分别为m3=20 kg,m4=3 kg,m5=62 kg;构件1,2的质量忽略不计,各杆的质心都在杆的中点处,构件3,4绕质心的转动惯量JS3=0.12 kg/m2,JS4=0.00 025 kg/m2,该机构在工作进程时刨头5受与行程相反的阻力Fr=5 880 N.根据以上要求,牛头刨床关键点坐标设置如表1所示.表1 牛头刨床关键点坐标Tab.1 The coordinates of key points of shaper关键点Point _APoint_BPoint_CPoint_DPoint_E坐标值(0,275,0)(125275,0)(0,0,0)(248.24,546.24,0)(101.02,575,0)1.1.1 位移分析先建立一直角坐标系,C点为坐标原点,并标出各杆矢量及其方位角,各构件构成矢量封闭形,机构各矢量构成2个矢量封闭方程为l6+l1=s3, (1)l3+l4=l6+sE, (2)将式(1)(2)写成两坐标轴上的投影式,得l1cos θ1=s3cos θ3,l6+l1sin θ1=s3sin θ3, (3)l3cos θ3+l4cos θ4=sE,l3sin θ3+l4sin θ4=l6. (4)联解以上式子,即可求得滑块2沿摆动杆3的位移量s3,构件3,4的角度θ3,θ4及刨头E点的位移量sE.1.1.2 速度分析由式(3),(4)对时间求导,写成矩阵形式得(5)解线性方程组(5)即可求得滑块2沿摆动杆3的滑动速度构件3,4的角速度ω3,ω4及刨头E点的速度vE.1.1.3 加速度分析由式(5)对时间求导,写成矩阵形式得(6)解线性方程组(6)即可求得滑块2沿摆动杆3的滑动加速度构件3,4的角加速度α3,α4及刨头E点的加速度αE.由以上各式,即可得到牛头刨床六杆机构刨头E点的位移、速度和加速度.1.2 运动学建模及仿真1.2.1 创建模型及添加运动副和驱动根据表1中各关键点坐标,建立曲柄1,滑块2,摆动杆3,连杆4和刨头5模型,如图2所示.根据各构件之间的运动副关系添加运动副,并选择曲柄1为主动件,添加旋转驱动,完成运动的设置.1.2.2 运动仿真及结果后处理运行仿真后,将测量出的原动件曲柄1的转动角度与刨头E点的位移、速度和加速度放在同一坐标系中(图3).由图3可以看出,原动件转动在何种位置时,刨头E点的位移、速度和加速度最大(或最小).通过ADAMS的后处理,可得刨头E点的最大位移与最小位移分别为128.1,-417.3 mm,故其行程为545.4 mm.从图3中可以看出,刨头在切削进程阶段比较平稳,在返回时较快,说明六杆机构具有急回特性,与实际情况相符合,满足要求.在理论计算中,当曲柄1与摆动杆3垂直时,刨削位置达到极限位置,由此可算出θ1为333 °和207°.根据式(3)、(4)可计算出极限位移,故行程S=|127.93-(-416.85)|=544.78 mm.与仿真结果相当,因此仿真是正确的.2 动力学分析2.1 数学模型的建立根据前述运动学仿真求得的相关构件加速度值,可确定出各构件所受的惯性力及惯性力矩.各构件受力如图4所示,设Fi为作用在第i个构件上的惯性力,Mi为第i个构件上的惯性力矩,Md为加在构件1上的平衡力矩,根据构件上所有外力在x轴上的投影的代数和为零,构件上所有外力在y轴上的投影的代数和为零以及构件上所有外力对其质心Si的力矩代数和为零,对各构件列平衡方程如下.对构件1有F21x+F61x=0,F21y+F61y=0,-(yB-yA)F21x+(xB-xA)F21y+Md=0. (7)对构件2有F12x+F32x=0,F12y+F31y=0. (8)因各力对质心取矩代数和恒为零,故无法列出力矩平衡方程.根据几何约束条件,可以列出以下方程作为补充方程,即F32xcos θ3+F32ysin θ3=0. (9)对构件3有F43x+F23x+F3x+F63x=0,F43y+F23y+F3y+F63y-m3g=0,-(yD-yS3)F43x+(xD-xS3)F43y-(yB-yS3)F23x+(xB-xS3)F23y+(yS3-yC)F63x-(xS3-xC)F63y+M3=0. (10)对构件4有F54x+F4x+F34x=0,F54y+F4y-m4g+F34y=0,-(yE-yS4)F54x-(xS4-xE)F54y+(yS4-yD)F34x+(xD-xS4)F34y+M4=0. (11)对构件5,由于导路对刨头5只产生垂直反力F65,但力作用点未知.因此可以这样处理:把反力F65向质心S5简化,可得反力F65和反力矩M65.列方程如下,即F45x+Fr+F5x=0,F45y+F65-m5g=0,F45yxS5+M65=0. (12)将上述各构件的平衡方程式,整理成以运动副反力和平衡力矩为未知量的线性方程组,并写成矩阵形式,即CFR=D, (13)式中:C为系数矩阵;FR为未知力矩阵;D为已知力矩阵,其中.2.2 动力学建模与仿真2.2.1 添加质量和转动惯量及阻力按已知条件分别设置曲柄1,滑块2,摆动杆3,连杆4和刨头5的质量和转动惯量,并对刨头5设置阻力Fr=5 880 N,完成动力学仿真的设置.2.2.2 动力学仿真及结果后处理仿真结束后,右击曲柄1与大地之间运动副JOINT_1即可查看运动副A处的约束反力及平衡力矩Md,如图5和图6所示.刨头5所受阻力Fr如图7所示,同时也可以查看刨头5所受的垂直反力F65随时间的变化曲线,如图8所示.从图5可以看出,牛头刨床刨头在工作进程中,机构在x(水平)方向的受力明显比y(垂直)方向要平滑些,且力的方向没有变化,而y(垂直)方向的受力却出现了较大的变化.因此可以得出,y(垂直)方向的受力主要是由于机器振动而引起.由图6可以看出,牛头刨床刨头在工作进程中,平衡力矩变化较平缓,而空行程时变化较大,符合实际要求,故仿真是正确的.3 结语通过六杆机构仿真输出曲线图可以看出:牛头刨床工作进程中速度较平稳,加速度值较小;回程时速度变化大,加速度值也较大,具有急回特性,仿真结果与实际相符合.运用ADAMS仿真直观揭示了牛头刨床刨头的运动规律和各构件的受力状态,与矩阵求解相比,更加形象生动.通过对牛头刨床六杆机构进行建模、运动学及动力学仿真分析,实现了机构设计的形象化和量化的完美统一,大大提高了设计效率和质量,节省了时间和成本.参考文献:[1] 敏政,邵翔宇,王乐,等.多目标规划下的牛头刨床优化设计[J].机械与电子,2009(9):24-26.[2] 黎新,王国彪.牛头刨床的遗传优化设计[J].机床与液压,2006(10):40-42.[3] 陈立平.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005:15-200.[4] 李旭荣,郑相周.基于ADAMS的牛头刨床工作机构虚拟样机设计与动态仿真[J].中国工程机械学报,2007,5(4):437-439.[5] 李龙海.基于SIMULINK的平面六杆机构仿真分析[J].机械设计与制造,2009,10(1):154-156.[6] 杨双龙,战强,马晓辉,等.基于ADAMS的锁紧臂机构的动力学仿真及参数化分析[J].机械设计与制造,2010,11(11):26-28.[7] CHANG DEGONG, LI HENG, XIAO ZHIJUAN, et al. Kinematics Simulation of Air Splicer Shearing Mechanism Based on ADAMS[C]//2009 Second International Conference on Intelligent Computation Technology and Automation-ICICTA2009, IEEE Computer Society. 2009: 75-77.[8] 张国凤,李革,赵匀.两种牛头刨床机构的动力学特性分析与比较[J].农机化研究,2005,5(3):66-68.[9] 宋晓华,方坤礼,吴军.基于Matlab的机构动力学仿真分析[J].煤矿机械,2005(2):51-53.[10] 王栗,覃岭,阮卫平,等.机械式压力机曲柄六杆机构运动学特性分析[J].机械传动,2011,35(1):59-61.。
基于ADAMS的六连杆机构的运动学分析 开题报告
虚拟样机技术作为一项计算机辅助工程(CAE)技术于上个世纪80年代随着计算机技术的发展而出现,在90年代特别是进入21世纪以后得到了迅速发展和广泛应用。目前,虚拟样机技术在一些较发达国家,如美国、德国、日本等已得到广泛的应用[3]。应用领域从汽车制造业、工程机械、航空航天业、造船业、机械电子工业、国防工业、通用机械到人机工程学、生物力学、医学以及工程咨询等很多方面。所涉及的产品从庞大的卡车到照相机的快门。从上天的火箭到轮船的锚链。在各个领域里,针对各种产品,虚拟样机技术都为用户节约了成本,节省了时间并提供了满意的设计方案;美国波音747飞机的设计是虚拟样机技术应用的典范。它的开发周期从通常的8年减至5年,飞机的设计,装配和测试均在计算机中模拟完成,保证了一次试制成功;通用动力公司1997年建成了第一个全数字化机车虚拟样机,并且进行了产品的设计、分析、制造及夹具,模具工装设计和可维修性设计,覆盖件设计,整车仿真设计等;Caterpillar公司以前制造一台大型设备的物理样机需要数月时间,并耗资数百万美元。为提高竞争力,必须大幅度消减产品的设计制造成本Caterpillar公司采用虚拟样机技术,从根本上改进设计和试验步骤,实现了快速虚拟试验多种设计方案.从而使产品成本低,性能却更加优越。由此可见,虚拟样机技术在国外已经得到了相当大程度上的应用并获得了很大的重视。在国内,机械虚拟样机技术在某些领域也已得到了一定的应用和推广。例如月球表面探测机器人方案研究,就是运用虚拟样机技术对涉及到的多项关键技术进行深入研究,并取得可喜成果的。但从目前我国的情况来看,机械虚拟样机技术还主要只是在专业研究机构和高校研究机构中应用,只能算是初级应用阶段。由此可见,我国机械虚拟样机技术存在着很大的发展空间。
三研究的基本内容
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ADAMS软件的摆动导杆机构的运动
学分析
一、背景:
摆动导杆机构是一种应用比较广泛的平面连杆机构,例如牛头刨床上就用了这种机构。
它将曲柄的旋转运动转换成为导杆的往复摆动。
机构相对简单易懂,对于我们初学ADAMS的学生来说便于建模和分析。
二、利用ADAMS的优点:
对于摆动导杆机构的运动分析,常用的方法有图解法和解析法。
图解法:直观、方便,但精度不高,需要反复做图。
解析法:人工计算运算量大,容易出错。
利用ADAMS可以产生复杂机械系统的虚拟样机,真实地仿真其运
动过程。
精确度很高,而且将计算工作交给计算机能省去大量人工,并且不容易出错。
三、建立力学模型:
图中为摆动导杆机构
曲柄AB为原动件
导杆BC为从动件
通过滑块B将曲柄AB的
连续转动转变为导杆BC
的往复摆动。
四、建立样机模型:
首先是给定模型具体的参数:各杆的杆长以及曲柄AB的转速。
利用ADAMS建立样机:根据几何关系确定A、B、C三点的坐标,可以假定C为坐标原点从而确定模型。
再各零件之间建立相应的约束副。
固定副:机架
转动副1:曲柄、机架
转动副2:曲柄、滑块
转动副3:导杆、机架
移动副:滑块、导杆
右图为理论的样机图
下图为实际做的时候建立的样机图,比较理论的样机图,我没有专门建立一个杆将其锁为机架,而是直接
在坐标轴上建立了2个点,将坐标轴当作了ac杆。
附图如下
五、仿真分析:
通过已经建立好的模型给出曲柄的转速,就可以利用ADAMS自动输出构件的位移、速度、加速度等详细的参数。
并且利用这些输出值可以通过ADAMS/View以图形形式输出,从而能清晰地看出他们在仿真过程中的变化规律。
六、具体参数:
W=5rad/s AB(主动件)=100mm AC(固连机架的杆)=350mm
七、输出图:
本图为滑块的位移图。
图中红色线为x方向的位移。
蓝色线为y方向的位移,合成图为一直线。
从图中可以看出滑块进行往复运动,轨迹为一个圆。
本图为滑块的速度图。
图中红色线为x方向的速度。
蓝色线为y方向的速度,合成图为一直线。
速度为匀速圆周运动。
本图为滑块的加速度图。
图中红色线为x方向的加速度。
蓝色线为y 方向的加速度。
本图为从动件(BC)的速度曲线。
本图为从动件(BC)的加速度曲线。
八、分析目的:
通过对不同的杆件的不同尺寸可以快速的得到其运动特性,从而可以得出实际应用中的最佳尺寸,达到优化设计的目的。
也可以通过对机构不同杆件不同尺寸的分析可以得到其运动特性,从而能够最佳得利用其特性。
本试验中只给出了一组尺寸杆件的运动学分析,同理可以改变其尺寸得到不同的运动学特性。
本试验在于对利用ADAMS来进行力学分析,从而快速的得到其运动学特性,进而优化设计。
九、总结:
本文采用ADAMS软件对摆动导杆机构虚拟样机进行运动学分析,得到了摆动导杆机构的运动曲线。
实践表明,虚拟样机技术简便、直观、可靠,避免了解析法繁琐的分析、推导和论证过程以及图解法反复绘图和精确不高的问题。
运用ADAMS软件对机构进行分析和论证,仿真得到各个机构的运动特征,有利于机构设计初期方案的筛选和优化。
十、参考文献:
[1] ADAMS 基础与工程范例教程石愽强 [等]编著
中国铁道出版社 2007
[2] ADAMS 入门详解与实例李增刚编著
国防工业出版社 2006
[3] ADAMS实例教程李军邢俊文覃文洁等编著
北京理工大学出版社 2002。