【CN110021173A】一种基于智能交通的车路协同控制系统【专利】
一种智能交通控制系统[发明专利]
![一种智能交通控制系统[发明专利]](https://img.taocdn.com/s3/m/25571f5cfd0a79563d1e7279.png)
专利名称:一种智能交通控制系统专利类型:发明专利
发明人:凌翔
申请号:CN201710849157.5申请日:20170920
公开号:CN107424421A
公开日:
20171201
专利内容由知识产权出版社提供
摘要:本发明涉及一种智能交通控制系统,用于交通技术领域。
它包括系统控制平台、调度系统、数据交换系统和定位系统;所述调度系统、数据交换系统和定位系统通过无线移动通信与系统控制平台连接;所述定位系统设置在城市路口各交通信号灯上;所述城市路口各交通信号灯上设置有路况流量采集系统。
本发明的智能交通控制系统可以根据路况流量采集系统采集的各路段的车辆流量信息,经过信号控制系统和系统控制平台控制路口交通信号灯的红、黄、绿及行人红、绿灯的通、禁行工作时间,对维护交通秩序,改善路口通行率,达到最优的智能化红绿灯通行时间设置,而且具有实时更新的效果,可实现远程交通信号灯的通行设置,非常方便。
申请人:合肥工业大学
地址:230000 安徽省合肥市屯溪路193号
国籍:CN
代理机构:北京科亿知识产权代理事务所(普通合伙)
代理人:汤东凤
更多信息请下载全文后查看。
【CN110047280A】一种支持车路协同的智能交通灯控制系统【专利】
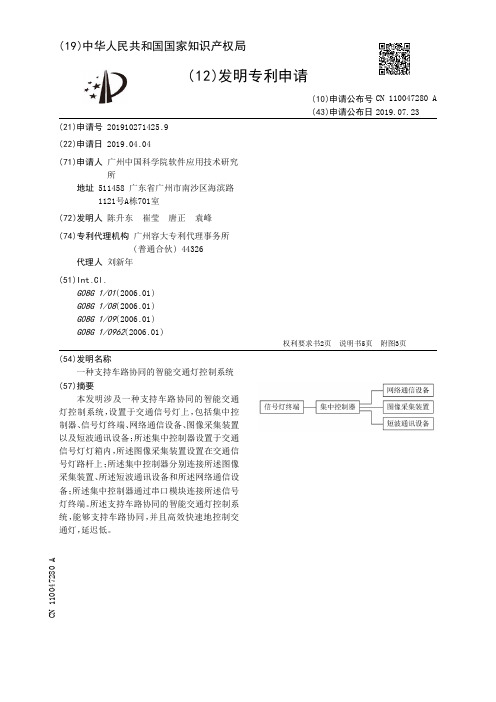
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910271425.9(22)申请日 2019.04.04(71)申请人 广州中国科学院软件应用技术研究所地址 511458 广东省广州市南沙区海滨路1121号A栋701室(72)发明人 陈升东 崔莹 唐正 袁峰 (74)专利代理机构 广州容大专利代理事务所(普通合伙) 44326代理人 刘新年(51)Int.Cl.G08G 1/01(2006.01)G08G 1/08(2006.01)G08G 1/09(2006.01)G08G 1/0962(2006.01)(54)发明名称一种支持车路协同的智能交通灯控制系统(57)摘要本发明涉及一种支持车路协同的智能交通灯控制系统,设置于交通信号灯上,包括集中控制器、信号灯终端、网络通信设备、图像采集装置以及短波通讯设备;所述集中控制器设置于交通信号灯灯箱内,所述图像采集装置设置在交通信号灯路杆上;所述集中控制器分别连接所述图像采集装置、所述短波通讯设备和所述网络通信设备;所述集中控制器通过串口模块连接所述信号灯终端。
所述支持车路协同的智能交通灯控制系统,能够支持车路协同,并且高效快速地控制交通灯,延迟低。
权利要求书2页 说明书5页 附图3页CN 110047280 A 2019.07.23C N 110047280A权 利 要 求 书1/2页CN 110047280 A1.一种支持车路协同的智能交通灯控制系统,设置于交通信号灯上,其特征在于,包括集中控制器、信号灯终端、网络通信设备、图像采集装置以及短波通讯设备;所述集中控制器设置于交通信号灯灯箱内,所述图像采集装置设置在交通信号灯路杆上;所述集中控制器分别连接所述图像采集装置、所述短波通讯设备和所述网络通信设备;所述集中控制器通过串口模块连接所述信号灯终端;所述图像采集装置,用于采集人流或车流图像,并上传至所述集中控制器进行分析,以供所述集中控制器对所述信号灯终端进行控制;所述短波通讯设备,用于在所述集中控制器的控制下与车载系统进行交互,广播交通信号灯状态,以实现车路协同;所述集中控制器,还用于通过所述网络通信设备与远程的监控平台进行交互,接收监控的平台的控制指令对信号灯终端进行控制,或上报交通信号灯各模块的状态。
【CN110001771A】一种全解耦线控液压转向系统【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910347928.X(22)申请日 2019.04.28(71)申请人 吉林大学地址 130012 吉林省长春市前进大街2699号(72)发明人 管欣 张育宁 卢萍萍 雍文亮 詹军 段春光 金号 李彦锋 (74)专利代理机构 长春吉大专利代理有限责任公司 22201代理人 李泉宏(51)Int.Cl.B62D 5/06(2006.01)B62D 5/10(2006.01)B62D 5/30(2006.01)(54)发明名称一种全解耦线控液压转向系统(57)摘要本发明公开了一种全解耦线控液压转向系统,属于汽车转向系统技术领域,本发明的目的是提供一套对电机性能要求较低,结构更为紧凑,能实现转向全解耦和失效保护的功能、具有主动转向快速、角度调节精确的线控转向系统;该系统由方向盘、转向管柱、解耦式转向模拟器、高压回油机构、齿轮助力机构、齿轮齿条转向机、左前车轮、右前车轮和电子控制单元组成;在解耦式转向模拟器中设置的动啮合齿轮可以选择性地与转向模拟器齿轮或转向柱啮合,同时配合齿轮助力机构所拥有的机械转向和液压转向两种方式,既实现了驾驶员与转向系统的全解耦,同时系统断电失效时,方向盘与转向车轮机械连接,保障了驾驶的安全性。
权利要求书4页 说明书12页 附图9页CN 110001771 A 2019.07.12C N 110001771A权 利 要 求 书1/4页CN 110001771 A1.一种全解耦线控液压转向系统,其特征在于,该系统由方向盘(1)、转向管柱(2)、解耦式转向模拟器(3)、高压回油机构(4)、齿轮助力机构(5)、齿轮齿条转向机(6)、左前车轮(7)、右前车轮(8)和电子控制单元(9)组成;方向盘(1)的底部与转向管柱(2)的上端相连,解耦式转向模拟器(3)的上端与转向管柱(2)的下端相连,解耦式转向模拟器(3)的下端与齿轮助力机构(5)的上端活动连接;齿轮助力机构(5)的下端与齿轮齿条转向机(6)的上端连接,齿轮齿条转向机(6)的左右两端分别通过转向拉杆与左前车轮(7)和右前车轮(8)相连,齿轮齿条转向机(6)的上端为齿轮、下端为齿条,齿轮齿条转向机(6)可将齿轮助力机构(5)的从动轴(42)的旋转运动转化为齿条的直线运动;高压回油机构(4)与齿轮助力机构(5)连接,使齿轮助力机构(5)的高压腔与低压腔之间的压力差保持恒定;电子控制单元(9)与解耦式转向模拟器(3)、高压回油机构(4)和齿轮助力机构(5)控制连接;其中,齿轮助力机构(5)由紧固螺栓(35)、齿轮助力机构上壳体(36)、高压腔进油孔(37)、主动轴(38)、密封环I(39)、压环I(40)、轴承I(41)、从动轴(42)、从动齿轮(43)、低压腔出油孔(44)、橡胶密封环I(45)、齿轮助力机构下壳体(46)、液压腔缸筒(47)、低压腔隔板(48)、压环II(49)、密封环II(50)、轴承II(51)、主动齿轮(52)、轴承III(53)、轴承IV(54)、高压腔隔板(55)、高压腔出液阀I(56)、低压腔进液阀I(57)、低压腔进液阀II(58)、高压腔出液阀II(59)、橡胶密封环III(60)和橡胶密封环II(61)组成;齿轮助力机构上壳体(36)为向下开口的盘类零件,其外轮廓由左右两个半径相同的半圆和中间的矩形相接组成,两个半圆的圆心和矩形的外心在同一直线上;齿轮助力机构上壳体(36)的盘形内轮廓与外轮廓形状一致,两个轮廓的圆心均重合,内轮廓尺寸略小;齿轮助力机构上壳体(36)在外轮廓与内轮廓之间均匀分布多个通孔,通孔内壁上有内螺纹;外轮廓左侧半圆圆心处有同心阶梯通孔,阶梯通孔上端半径大于下端半径;外轮廓右侧半圆圆心处有同心盲孔,该盲孔内径与阶梯通孔下端内径相同;沿着齿轮助力机构上壳体(36)的盘形内轮廓边缘有向下开口的环形凹槽;外轮廓左、右两侧半圆圆心处分别有向下开口的同心左半圆形凹槽和右半圆形凹槽,两个半圆形凹槽的端部均有延伸到盘形内轮廓边缘环形凹槽的直线凹槽;在盘形内轮廓边缘环形凹槽与同心左半圆形凹槽之间有一圆形小通孔,该通孔为高压腔进油孔(37);在盘形内轮廓边缘环形凹槽与同心右半圆形凹槽之间也有一圆形小通孔,该通孔为低压腔出油孔(44);所述的高压腔进油孔(37)、低压腔出油孔(44)和两个外轮廓的圆心在同一直线上;齿轮助力机构下壳体(46)为向上开口的盘类零件,其形状和尺寸均与齿轮助力机构上壳体(36)绕中心旋转180°后一致,唯一区别在于齿轮助力机构下壳体(46)在盘形内轮廓边缘环形凹槽与同心左、右半圆形凹槽之间不设置小通孔;齿轮助力机构上壳体(36)和齿轮助力机构下壳体(46)的外轮廓与内轮廓之间的通孔对齐,通过紧固螺栓(35)将齿轮助力机构上壳体(36)和齿轮助力机构下壳体(46)固定在一起;液压腔缸筒(47)为上下两端开口的钢筒类零件,其横截面轮廓形状与齿轮助力机构上壳体(36)中的盘形内轮廓一致,在左右两个半圆与矩形四个接口处有沿钢筒壁上下贯通并垂直分布的四个凹槽;液压腔缸筒(47)安装在齿轮助力机构上壳体(36)和齿轮助力机构下壳体(46)内轮廓边缘处的环形凹槽内,并通过橡胶密封环I(45)将液压腔缸筒(47)与齿轮2。
一种车路协同交通控制系统[发明专利]
![一种车路协同交通控制系统[发明专利]](https://img.taocdn.com/s3/m/fb27b0d1a32d7375a41780e8.png)
专利名称:一种车路协同交通控制系统
专利类型:发明专利
发明人:姜竹胜,汤新宁,王川宿,王乾峰,刘华仁,方涛,尚欣,李海峰,寇小丰,郝家余
申请号:CN201410277029.4
申请日:20140619
公开号:CN104021684A
公开日:
20140903
专利内容由知识产权出版社提供
摘要:本发明揭示了一种车路协同交通控制系统,包括车载单元,其包括GPS定位模块、车辆通讯模块、信息处理模块,道路指挥单元,其包括信号灯控制模块,信号灯通讯模块、信号处理单元;本发明的优点在于该系统可根据路况情况实时调节交通信号灯的通行时间,减少主干道车辆在十字路口的无效停顿时间和等待时间,提高交通通行效率,有效缓解交通问题,还可减少汽车燃油的浪费,通过车载单元与路边单元的实时通讯实现交通流量的控制,无需在路边铺设很多传感器设备,方便快捷,成本低。
申请人:奇瑞汽车股份有限公司
地址:241009 安徽省芜湖市经济技术开发区长春路8号
国籍:CN
代理机构:芜湖安汇知识产权代理有限公司
代理人:朱圣荣
更多信息请下载全文后查看。
一种智能交通系统[发明专利]
![一种智能交通系统[发明专利]](https://img.taocdn.com/s3/m/950d8a3480eb6294dc886c02.png)
专利名称:一种智能交通系统专利类型:发明专利
发明人:沈文众,武文娟
申请号:CN202010479677.3申请日:20200529
公开号:CN111653107A
公开日:
20200911
专利内容由知识产权出版社提供
摘要:本发明公开了一种智能交通系统,其特征在于,所述智能交通系统包括多个智能交通单元,每个所述智能交通单元包括智能通道、智能警示灯;所述智能通道包括依次顺序排列的n条仅左转通道、n条可变智能通道、n条仅直行通道;所述智能警示灯包括固定杆、警示灯箱,所述警示灯箱与所述固定杆的一端固定连接,所述固定杆的另一端固定在地表;所述警示灯箱包括壳体,设置于壳体表面的左转指示灯、直行指示灯、照相机,设置于壳体内部的智能控制单元。
本发明公开的智能交通系统能够极大的减缓公路拥堵的问题。
申请人:山东交通职业学院
地址:261206 山东省潍坊市高新技术开发区潍县中路8号
国籍:CN
更多信息请下载全文后查看。
一种车路协同智能交通控制系统[发明专利]
![一种车路协同智能交通控制系统[发明专利]](https://img.taocdn.com/s3/m/0783d3811ed9ad51f11df298.png)
专利名称:一种车路协同智能交通控制系统专利类型:发明专利
发明人:连仕钊,谢烁斌,沈琼妹
申请号:CN201610867608.3
申请日:20160930
公开号:CN106652558A
公开日:
20170510
专利内容由知识产权出版社提供
摘要:本发明公开了一种车路协同智能交通控制系统,包括GPS模块、车内短距离通信模块、路面湿度传感器、速度传感器、车辆处理控制模块、刹车减速辅助系统、交通信息处理控制平台和告警器,其中:GPS模块,用于定位车辆的位置信息;车内短距离通信模块,与GPS模块连接,用于将各自车辆的位置信息传输给周边车辆;路面湿度传感器,用于监测路面湿度情况,并传输给车辆处理控制模块;速度传感器,用于监测车辆速度,并传输给车辆处理控制模块;车辆处理控制模块,与车内短距离通信模块连接,用于根据周边车辆位置信息计算处理获得与周边车辆的距离;还分别与路面湿度传感器和刹车减速辅助系统连接。
本发明能够在汽车在监控路段行驶过程中起到智能的告警控制作用。
申请人:广州大正新材料科技有限公司
地址:510663 广东省广州市高新技术产业开发区光谱东路3号A410
国籍:CN
代理机构:广州粤高专利商标代理有限公司
更多信息请下载全文后查看。
一种基于智能交通平台的智能车辆控制系统及方法[发明专利]
![一种基于智能交通平台的智能车辆控制系统及方法[发明专利]](https://img.taocdn.com/s3/m/c502c0f96c175f0e7dd13772.png)
专利名称:一种基于智能交通平台的智能车辆控制系统及方法专利类型:发明专利
发明人:李振龙,王保菊,荣建,赵晓华,金雪,朱明浩
申请号:CN201410261100.X
申请日:20140612
公开号:CN104015723A
公开日:
20140903
专利内容由知识产权出版社提供
摘要:本发明涉及一种基于智能交通平台的智能车辆控制系统及方法。
所述系统包括智能车辆控制器,闭合电磁导轨,电磁传感器,转向舵机,电机驱动模块,测速模块,红外测距模块,射频识别模块,射频线圈和信号发生器。
所述控制方法包括智能车辆沿智能交通平台的设定道路自主行驶步骤,速度控制步骤,编队行驶的步骤,在交叉路口按照交通规则行驶的步骤。
本发明采用电磁传感器完成智能车辆循迹功能,解决了采用光电、摄像头传感器易受到可见光干扰的问题。
基于红外测距实现编队行驶控制,解决了采用超声波测距技术存在的受环境温度影响较大、检测准确率低等问题。
基于射频识别技术克服了智能车通过交叉口时控制信号无法和信号灯同步导致闯红灯的问题。
申请人:北京工业大学
地址:100124 北京市朝阳区平乐园100号
国籍:CN
代理机构:北京思海天达知识产权代理有限公司
代理人:沈波
更多信息请下载全文后查看。
【CN110260872A】一种车路协同环境下基于GPS的动态超车轨迹规划系统【专利】
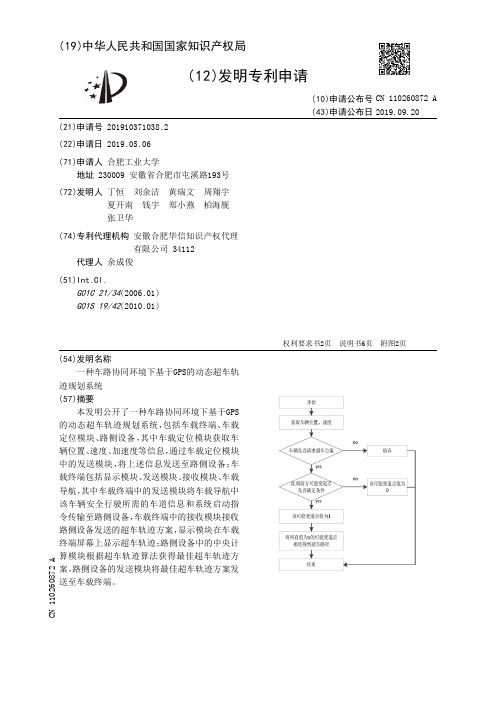
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910371038.2(22)申请日 2019.05.06(71)申请人 合肥工业大学地址 230009 安徽省合肥市屯溪路193号(72)发明人 丁恒 刘余洁 黄瑞文 周翔宇 夏开南 钱宇 郑小燕 柏海舰 张卫华 (74)专利代理机构 安徽合肥华信知识产权代理有限公司 34112代理人 余成俊(51)Int.Cl.G01C 21/34(2006.01)G01S 19/42(2010.01)(54)发明名称一种车路协同环境下基于GPS的动态超车轨迹规划系统(57)摘要本发明公开了一种车路协同环境下基于GPS的动态超车轨迹规划系统,包括车载终端、车载定位模块、路侧设备,其中车载定位模块获取车辆位置、速度、加速度等信息,通过车载定位模块中的发送模块,将上述信息发送至路侧设备;车载终端包括显示模块、发送模块、接收模块、车载导航,其中车载终端中的发送模块将车载导航中该车辆安全行驶所需的车道信息和系统启动指令传输至路侧设备,车载终端中的接收模块接收路侧设备发送的超车轨迹方案,显示模块在车载终端屏幕上显示超车轨迹;路侧设备中的中央计算模块根据超车轨迹算法获得最佳超车轨迹方案,路侧设备的发送模块将最佳超车轨迹方案发送至车载终端。
权利要求书2页 说明书6页 附图2页CN 110260872 A 2019.09.20C N 110260872A权 利 要 求 书1/2页CN 110260872 A1.一种车路协同环境下基于GPS的动态超车轨迹规划系统,其特征在于:包括设置于车辆中的车载终端、车载定位模块,以及设置在路侧的路侧设备,其中:路侧设备包括中央计算模块,以及连接中央计算模块的接收模块、发送模块和存储模块;车载终端包括车载导航,以及连接车载导航的接收模块、发送模块和显示模块;车载定位模块包括相互连接的GPS传感器和发送模块;所述车载终端中,车载导航通过连接的发送模块将车辆安全行驶所需的车道信息和系统启动指令向路侧设备发送;同时车载定位模块中,GPS传感器获取车辆的位置、速度、加速度信息数据后通过连接的发送模块向路侧设备发送;路侧设备中的中央计算模块设置有动态超车轨迹规划算法程序,中央计算模块通过连接的接收模块接收车载终端发出的系统启动指令、车辆安全行驶所需的车道信息,以及接收车载定位模块发出的车辆位置、速度、加速度信息数据,并由中央计算模块将系统启动指令、车辆安全行驶所需的车道信息、车辆位置、速度、加速度信息数据存储在存储模块中,中央计算模块中的动态超车轨迹规划算法程序从存储模块读取系统启动指令后,再从存储模块中读取车辆安全行驶所需的车道信息、车辆位置、速度、加速度信息数据,最终由动态超车轨迹规划算法程序根据车辆安全行驶所需的车道信息、车辆位置、速度、加速度信息数据计算获得最佳超车轨迹方案信息,中央计算模块将最佳超车轨迹方案信息通过连接的发送模块向车载终端发送;车载终端的车载导航通过连接的接收模块,接收路侧设备发出的超车轨迹方案,并由车载导航将超车轨迹方案送入显示模块进行显示。
一种车辆智能控制系统[发明专利]
![一种车辆智能控制系统[发明专利]](https://img.taocdn.com/s3/m/153aa5811ed9ad51f01df2f1.png)
专利名称:一种车辆智能控制系统专利类型:发明专利
发明人:不公告发明人
申请号:CN201610898823.X 申请日:20161014
公开号:CN106394563A
公开日:
20170215
专利内容由知识产权出版社提供
摘要:本发明提供了一种车辆智能控制系统,包括接触器子系统、控制连接子系统和故障监测子系统,所述接触器子系统包括多个接触器,所述控制连接子系统包括中央控制器、第一连接器和第二连接器;所述中央控制器通过第一连接器和第二连接器连接所述接触器子系统,中央控制器用于通过所述第一连接器和第二连接器中的至少一个来传递控制信号给所述接触器子系统来控制所述接触器;所述故障监测子系统用于对车辆的控制过程进行故障监测。
本发明的有益效果为:设置的车辆控制系统通过容错结构来提高系统的可靠性。
申请人:深圳万发创新进出口贸易有限公司
地址:518054 广东省深圳市南山区南山街道南海大道2168南油大厦B座1002室
国籍:CN
代理机构:北京高航知识产权代理有限公司
代理人:赵永强
更多信息请下载全文后查看。
一种自动驾驶车辆车路协同的管控系统[实用新型专利]
![一种自动驾驶车辆车路协同的管控系统[实用新型专利]](https://img.taocdn.com/s3/m/30b341c8541810a6f524ccbff121dd36a32dc48e.png)
专利名称:一种自动驾驶车辆车路协同的管控系统专利类型:实用新型专利
发明人:杨少华
申请号:CN202121904468.5
申请日:20210813
公开号:CN216388346U
公开日:
20220426
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种自动驾驶车辆车路协同的管控系统,属于自动驾驶车辆管控技术领域。
该系统包括车辆管理系统;还包括车载控制器、地面导线线圈、信号处理装置、调制解调器、地面通讯设备和车载天线;车载控制器与车载天线相连;车载控制器安装在车辆中或车辆表面;车载天线安装在车辆底表面上;地面导线线圈与信号处理装置相连;信号处理装置与调制解调器相连;调制解调器通过地面通讯设备与车辆管理系统相连;地面导线线圈平铺于车辆行驶路面下面;本实用新型基于电磁耦合技术、无线通讯技术、信号调制技术和网络通讯技术,实现对自动驾驶车辆定位、速度校正、多车跟车预警以及行车区间占用、区域监控等功能。
申请人:昆明船舶设备集团有限公司
地址:650000 云南省昆明市人民东路3号
国籍:CN
代理机构:昆明正原专利商标代理有限公司
更多信息请下载全文后查看。
一种应用于智能网联交通系统的协同自动驾驶系统[发明专利]
![一种应用于智能网联交通系统的协同自动驾驶系统[发明专利]](https://img.taocdn.com/s3/m/c01dce2303020740be1e650e52ea551810a6c933.png)
专利名称:一种应用于智能网联交通系统的协同自动驾驶系统专利类型:发明专利
发明人:冉斌,陈天怡,李深,程阳,李林恒,周致,何赏璐,李小天,董硕煊,姚轶凡,石昆松,石皓天,吴可书,付思成
申请号:CN202210141463.4
申请日:20220216
公开号:CN114501385A
公开日:
20220513
专利内容由知识产权出版社提供
摘要:本申请公开了一种应用于智能网联交通系统的协同自动驾驶系统,包括协同管理子系统、道路子系统、车辆子系统、用户子系统、通信子系统和支撑子系统;协同管理子系统提供系统和功能分配;车辆子系统向网联车辆提供自动驾驶控制数据;道路子系统用于从网联车辆接收数据、信息,以及检测交通状况,向网联车辆发送目标控制指令;用户子系统包括车辆用户模块和/或交通运输管理员模块;通信子系统用于各子系统之间的信息交换;支撑子系统包括云平台子系统和地图定位子系统,用于为各子系统提供数据支持。
本申请将自动驾驶技术领域中不同的辅助系统进行有效整合,为智能网联交通系统提供补全、增强、备份、提升、取代智能网联车辆的操作和控制。
申请人:上海丰豹商务咨询有限公司
地址:200241 上海市闵行区紫星路588号2幢14层205室
国籍:CN
更多信息请下载全文后查看。
一种智慧交通管控系统[发明专利]
![一种智慧交通管控系统[发明专利]](https://img.taocdn.com/s3/m/f01b9ae54a7302768f9939d1.png)
专利名称:一种智慧交通管控系统专利类型:发明专利
发明人:李展杨
申请号:CN202010321756.1
申请日:20200422
公开号:CN111540200A
公开日:
20200814
专利内容由知识产权出版社提供
摘要:本发明实施例公开了一种智慧交通管控系统,包括系统管理模块、实时监控模块、车辆布控管理模块,所述系统管理模块采用FC存储架构,通过构建大型关系数据库对所述实时监控模块的过车信息进行集中存储管理,所述系统管理模块通过MVC三层架构设计连接所述车辆布控管理模块对重点车辆进行布控,所述车辆布控管理模块通过数据处理子系统连接有综合查询模块,所述综合查询模块根据共享的数据结构,自定义跨表查询条件,通过所述系统管理模块内部的B/S架构检索综合数据库,整个系统实现了路口信息的研判与诱导信息发布,能够为引导交通参与者避让拥堵路段,大幅度的提高了交通秩序管理人员的工作效率。
申请人:广东电网有限责任公司,广东电网有限责任公司东莞供电局
地址:510060 广东省广州市越秀区东风东路757号
国籍:CN
代理机构:北京集佳知识产权代理有限公司
代理人:张建
更多信息请下载全文后查看。
一种基于人工智能的道路交通管理系统[发明专利]
![一种基于人工智能的道路交通管理系统[发明专利]](https://img.taocdn.com/s3/m/0c15add9541810a6f524ccbff121dd36a32dc41e.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910775405.5(22)申请日 2019.08.21(71)申请人 上海敖颉信息科技有限公司地址 201414 上海市奉贤区青村镇光明浦星公路6965号第2幢1058室(72)发明人 谢陈江 谢刚 谢世淼 (74)专利代理机构 北京鱼爪知识产权代理有限公司 11754代理人 廖斌(51)Int.Cl.G08G 1/01(2006.01)G08G 1/04(2006.01)G08G 1/065(2006.01)G08G 1/08(2006.01)H02J 7/35(2006.01)G06Q 10/06(2012.01)(54)发明名称一种基于人工智能的道路交通管理系统(57)摘要本发明涉及道路交通管理技术领域,尤其涉及一种基于人工智能的道路交通管理系统,包括用于对道路交通情况进行人工智能处理的道路交通管理平台,与道路交通管理平台通过第一无线数据传输模块进行远程通信的用于采集道路交通信息的道路交通信息采集模块,与道路交通管理平台通过第二无线数据传输模块进行远程通信的用于根据道路交通情况对交通信号灯进行智能控制的交通信号灯控制模块;本发明所提供的技术方案能够有效克服现有技术所存在的不具有根据道路的车辆情况智能的调节交通信号灯的功能,不具有应急处理功能,且不具有太阳能补充供电功能的缺陷。
权利要求书1页 说明书3页 附图2页CN 110517489 A 2019.11.29C N 110517489A1.一种基于人工智能的道路交通管理系统,其特征在于:包括用于对道路交通情况进行人工智能处理的道路交通管理平台,与所述道路交通管理平台通过第一无线数据传输模块进行远程通信的用于采集道路交通信息的道路交通信息采集模块,与所述道路交通管理平台通过第二无线数据传输模块进行远程通信的用于根据道路交通情况对交通信号灯进行智能控制的交通信号灯控制模块,与所述道路交通管理平台通过第三无线数据传输模块进行远程通信的用于对道路交通出现的紧急情况进行应急处理的道路交通应急处理模块,与所述道路交通管理平台相连的用于给道路交通管理平台中用电器补充电能的太阳能供电模块。
一种智能云交通控制系统及交通控制方法[发明专利]
![一种智能云交通控制系统及交通控制方法[发明专利]](https://img.taocdn.com/s3/m/350dd3d980c758f5f61fb7360b4c2e3f5627255d.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010318729.9(22)申请日 2020.04.21(71)申请人 交通运输部公路科学研究院地址 100088 北京市海淀区西土城路8号(72)发明人 岑晏青 宋向辉 王东柱 卢立阳 刘楠 朱立伟 孙玲 李亚檬 侯德藻 李宏海 赵佳海 高剑 衣倩 杨凤满 (74)专利代理机构 北京荟英捷创知识产权代理事务所(普通合伙) 11726代理人 左文(51)Int.Cl.G08G 1/01(2006.01)H04L 29/08(2006.01)(54)发明名称一种智能云交通控制系统及交通控制方法(57)摘要本申请提供一种智能云交通控制系统,具有自下而上依层级布置的交通数据调取、传输架构,包括:终端设备、第1级云设备、第2级云设备、...第i级云设备;其中,第i级云设备包括第1云设备、...第j云设备;第i级云设备还包括:与第j云设备对应设置的第1缓存云、...第k缓存云。
其中第j云设备中存储有第j云设备交通数据集,第k缓存云中存储有第k特征交通数据集,并且后者相对前者中的数据具有更高的被调取优先级。
因此本申请能够优先调取缓存云中更具任务对应性、更小范围乃至更优数据结构的交通数据,从而显著提高同级云设备乃至整个智能云交通控制系统的数据调取速率与检索响应效率。
权利要求书2页 说明书8页 附图3页CN 111696344 A 2020.09.22C N 111696344A1.一种智能云交通控制系统,所述系统具有自下而上依层级布置的交通数据调取、传输架构,包括:终端设备、第1级云设备、第2级云设备、...第i级云设备,其中i小于等于L,L为大于等于2的整数;其中,所述第i级云设备包括第1云设备、...第j云设备,其中j小于等于M,M为大于等于1的整数;其特征在于,所述第i级云设备还包括:与所述第j云设备对应设置的第1缓存云、...第k缓存云,其中k小于等于N,N为大于等于1的整数;其中,所述第j云设备中存储有第j云设备交通数据集,所述第k缓存云中存储有第k特征交通数据集;并且,所述第k特征交通数据集中的数据相对于所述第j云设备交通数据集中的数据,具有更高的被调取优先级。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910254990.4
(22)申请日 2019.04.01
(71)申请人 苏州华应通信息科技有限公司
地址 215000 江苏省苏州市高新区竹园路
209号4号楼602
(72)发明人 徐斌 李志华
(74)专利代理机构 北京科家知识产权代理事务
所(普通合伙) 11427
代理人 张丽
(51)Int.Cl.
G08G 1/042(2006.01)
G08G 1/017(2006.01)
(54)发明名称一种基于智能交通的车路协同控制系统(57)摘要本发明公开了一种基于智能交通的车路协同控制系统,所述系统包括:无线地磁车辆检测器,以RFID与地磁结合进行车辆检测,利用高精度的地磁传感器与专用的车辆波形分析算法,对流量、占有率、车速以及停车位有无进行检测;专用车载电子标签,采用无源有源结合,高频低频结合,针对智能交通系统,形成功能强大的电子车牌,实现车辆的身份识别、轨迹获取、收费、任务监控的一体化功能;车间通信设备,集成了GPS,RFID技术,实现车与车之间快速无线组网通信,并与车载电脑与传感器连接,成为移动的检测点与通信点;一体化阅读器,对系统各部件进行统一标准的数据采集,一体化阅读器之间能够实现级联与自组网通信,
构建无线传感网络。
权利要求书1页 说明书3页CN 110021173 A 2019.07.16
C N 110021173
A
权 利 要 求 书1/1页CN 110021173 A
1.一种基于智能交通的车路协同控制系统,其特征在于,所述系统包括:
无线地磁车辆检测器,以RFID与地磁结合进行车辆检测,利用高精度的地磁传感器与专用的车辆波形分析算法,对流量、占有率、车速以及停车位有无进行检测;
专用车载电子标签,采用无源有源结合,高频低频结合,针对智能交通系统,形成功能强大的电子车牌,实现车辆的身份识别、轨迹获取、收费、任务监控的一体化功能;
车间通信设备,集成了GPS,RFID技术,实现车与车之间快速无线组网通信,并与车载电脑与传感器连接,成为移动的检测点与通信点;
一体化阅读器,对无线地磁车辆检测器、专用车载电子标签、车间通信设备进行统一标准的数据采集,一体化阅读器之间能够实现级联与自组网通信,构建无线传感网络。
2.根据权利要求1所述的一种基于智能交通的车路协同控制系统,其特征在于:所述无线地磁车辆检测器包括有核心电路板,所述核心电路板半径≤4cm、尺寸:直径≤5cm,高≤7cm。
3.根据权利要求2所述的一种基于智能交通的车路协同控制系统,其特征在于:所述无线地磁车辆检测器与接收机之间通信距离≥200米。
4.根据权利要求1所述的一种基于智能交通的车路协同控制系统,其特征在于:所述专用车载电子标签有源标签的读取距离≥200米,可写入的车速≥120公里/小时。
2。