Creo运动仿真实例 PPT
基于proe的机构运动仿真ppt课件

编辑版pppt
22
四、运动环境
4. 阻尼
与弹簧不同,阻尼为耗散力,它可以作用于连接轴、两主体 之间、槽运动副。 直接点击按钮 ,其中C为阻尼系数。
编辑版pppt
23
四、运动环境
5. 力/扭矩
可以通过力/扭矩来模拟机构运动的外部环境。 直接点击按钮 其类型分为“点力”与“主体扭矩”,即力与扭矩。和其他 矢量相同,定义需要指出“模”和“方向”。
编辑版pppt
17
2. 齿轮(续)
三、运动副
齿轮类型分为一般、正、锥、涡轮、 齿条与小齿轮。
对于所有类型,需对每一个齿轮选 取连接轴,传动比一般都采用齿数比的 方式予以确定。
对于齿条类,齿条的定义通常需要 指出“滑动杆”连接轴,传动比定义一 般使用 mm/rev,即齿轮旋转一周,齿条 前进的距离。
30
1. 回放
六、获取结果
使用回放功能主要可以实现运动干涉检测、创建运动包络和动 态影像捕捉。指令为点击按钮
创建运动包络
保存为*.fra文件
播 放 动 画
逆向播放 重新开始
上一帧 循环播放
停止
编辑版pppt
捕捉为图片 或动态影像
正向播放 快进至结尾 下一帧 结尾处反转
31
➢回放:轨迹曲线
轨迹曲线用来表示机构中某一元素相对于另一零件的运动。分为“轨迹曲线”与 “凸轮合成曲线”两种: “轨迹曲线”表示机构中某一点或顶点相对于另一零件的运动。 “凸轮合成曲线”表示机构中某曲线或边相对于另一零件的运动。
编辑版pppt
18
2. 齿轮(续)
实例演练
三、运动副
编辑版pppt
19
四、运动环境
1. 重力
creo3.0机构动画运动仿真

销钉连接
注:即允许绕着指定的轴进行旋转和平移的连接,共2个 自由度.
3
圆柱连接
© 2006 PTC
连接类型
滑动杆连接 mdo\connections\slider
轴对齐/插入曲面 平面匹配/对齐或点对齐(轴向) 注:即允许沿着指定的轴进行平移的连接 总共1个自由度.
平面连接 mdo\connections\plane
10
© 2006 PTC
连接轴设置
选取 参照
对销钉连接轴 设置初始位置
可设置运 动的范围
动态属性
11
© 2006 PTC
连接轴设置
连接轴运动到约束位置时,可使 用定义的还原系数仿真冲击力, 也称恢复系数.
12
© 2006 PTC
高级连接类型
高级连接类型包括: 槽连接、凸轮连接、齿轮连接
槽连接与凸轮连接的对比
凸轮从动机构连接。 3、可以再拖拽操作中使用凸轮连接。 4、凸轮连接不能防止凸轮倾斜,必须对
某一元件定义附加连接副,防 止倾斜。
运动中发生倾斜
29
© 2006 PTC
槽连接
30
© 2006 PTC
槽连接
31
© 2006 PTC
槽连接
32
© 2006 PTC
槽连接范例
设置工作目录到机构运动仿真 \connections\solt目录下.
取消钩选
20
© 2006 PTC
凸轮连接的范例
1装配第一个零件cam_frame.prt >cam_frame.prt > 缺省
2装配第二个零件cam.prt
>cam.prt
1
CREO 机构的运动仿真与分析 ppt课件

使用此区域计算惯性矩。惯性矩是对机构的旋转惯量的定量测量,换言之,也就是主体 围绕固定轴旋转以反抗旋转运动发生改变的这种趋势。
“在坐标系原点”单选钮
测量相对于当前坐标系的惯性矩。
“在重心”单选钮
测量相对于机构的主惯性轴的惯性矩
CREO 机构的运动仿真与 2021/3/26 分析 ppt课件
16
11.3.2 重力的定义
7
其常用函数的具体含义如下表
CREO 机构的运动仿真与 2021/3/26 分析 ppt课件
函数类型 常数 斜坡
余弦
摆线 抛物线
多项式
公式 y=A y=A+B*t
y=A*cos(2*Pi*t/T+B)+C
y=L*t/TL*sin(2*Pi*t/T)/2*Pi y=A*t+1/2B(t2)
y=A+B*t+C+t2+D*t3
伺服电动机
3.选项说明
6
CREO 机构的运动仿真与 2021/3/26 分析 ppt课件
“伺服电动机定义”对话框中的选项含义见表
选项 “类型”选项卡
含义
“运动轴”单选钮
用于沿某一方向明确定义的运动,选择的运动轴可以为移动轴、旋转 轴或者由槽连接建立起的槽轴。
“几何”单选钮
通过指定模型中的几何图元建立运动过程,用于创建复杂的三维运动。
设置伺服电动机的运动类型
“轮廓”选项卡
“规范”选项组
设置电动机的位置、速度、加速度,可分别设置电动机的运动形式
“模”选项组 “图形”选项组
可以指定“模”的函数及参数,指定伺服电动机的位置、速度、加速 度的变化形式。常用函数的具体含义如下表11-2所示。
多体动力学仿真、creo高级技巧PPT课件
精品课件
2
MSC ADAMS 简介
ADMAS软件由若干模块组成,分为核心模 块、功能扩展模块、专业模块、接口模块、 工具箱5类,其中核心模块为ADAMS / View、 ADAMS / Solver、ADAMS/Postprocessor。
ADAMS 采用Parasolid作为实体建模的内核, 并且支持布尔运算。
精品课件
UAT_XB5.t16ir
ADAMS独立仿真
实例: A1:两轮简易模型; A2:四轮简易模型(10S 200Steps);
直线运动(轨迹) 原地转动(轨迹)
A3:直接导入模型(乱动);
A1.bin
A2.bin
A3.bin
精品课件
17
ADAMS独立仿真
实例: A4-C:四轮+机械臂; A4-B:四轮+机械臂(联动); A6:四轮+机械臂(一体) (5S 100Steps)
第 Mo一ti步on:1 0-2s底盘旋转450°,即转一圈半, 然 ste后p停(ti止me动,0作,0;,2,450d) 第 Mo二ti步on:4 2-4s腰部推杆做俯仰动作 ,行程 8st0emp(mtim;e,2,0,3,80)+step(time,3,0,4,-60) 第 Mo三ti步on:24-7S大臂转动150°,正反转; 第 ste四p步(tim:e7,-41,00,S5腕.5部,16转0动d)1+5s0te度p,(tim正e反,5转.5。,0,7,
版本:2005、2007、2012(32/64位)
精品课件
3
MSC ADAMS 核心算法
广义坐标系(地面坐标系) 局部坐标系 标架坐标系 位置:构件质心坐标(局部相对广义坐标
creo运动仿真教程
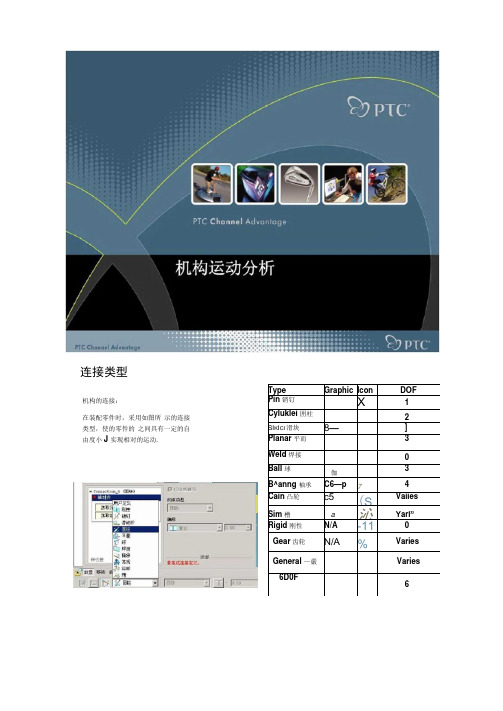
连接类型机构的连接:在装配零件时,采用如图所示的连接类型,使的零件的之间具有一定的自由度小J 实现相对的运动. Type Graphic Icon DOF Pin销钉X1 Cyluklei 囲柱2 SI K I CI滑块8—] Planar平而3Weld焊接0 Ball 球伽3B^anng袖承C6—p74 Cain凸轮c5(S Vaiies Sim槽a沁Yari”Rigid刚性N/A-110 Gear齿轮N/A%Varies General —嚴Varies6D0F6连接类型销钉连接 mdo\connections\pin&cylinder♦轴对齐/插入曲面.平面匹配/对齐或点对齐(径向)汪:即允许绕着指定的轴逬行旋转的连接•共1个自由度. 注:即允许绕着指定的轴迸行旋转和平移的连接,共2个 自由度.连接类型滑动杆连接 mdo\co nnections'slider♦轴对齐/插入曲面♦平面匹配/对齐或点对齐帥向) 注:即允许沿着指定的轴逬行平移的连接 总共1个自由度.平面连接 mdo\connections\plane♦平面匹配/对齐汪:即允许沿着1轴旋转和沿2轴方向平移 总共3个自由度.PTC Channel Advantoge••••W PTC*圆拄连接♦轴对齐/插入曲面平面连接销钉连接11拄连接滑块连接连接类型焊接连接两个坐标系对齐,元件自由度被完全消除。
连接后,元件与组件成为一 个主体■相互之间不再有自由度。
如果将一个子组件与组件用焊接连接,子组件内各零件将参照组件坐标系按其原有自由度的作用。
总自由度 为0。
刚性连接使用一个或多个基本约束,将元件与组件连接到一起。
连接后,元件与 组件成为一个主体,相互之间不再有自由度.如果将一个子组件与组件 用刚性连接,子组件内各零件也将一起被"粘〃住,其原有自由度不起作 用。
总自由度为0。
PTC Channel Advanlogc•••••W PTC*连接类型 球连接点与点对齐注:即允许绕着任意方向旋转的连接,总3个自由度轴承连接点在轴/曲线上注:它与机械上的“轴承”不同,它是元件(或组件)上 的一个点对齐到组件(或元件)上的一条直边或轴线 上,因此元件可沿轴线平移并任意方向旋转,具有1 个平移自由度和3个旋转自由度,总自由度为4拖拽当机构连接好以后,可以通过拖拽功能,使元件间产生 相对运动. 使用快照使剃拖动“(Dfdg )对话框中的•快照气Snapshots )迭项卡可显示不同配 置组件的己保存快範的列表。
CERO3.0动作仿真PPT课件
滑块连 接
连接的方法就不再说了,多试几次就可以了。要注意的是
刚性约束
• 1、尽量将涉及到运动的零件放在一个装配里,不要分散到子装配里。
• 2、有相对运动关系的两个零件装配时,不要参考第三个零件。
• 3、装配链的有些零件可以不做成连接,做成刚性约束。
槽连接
3
示例Βιβλιοθήκη 气缸• 动作介绍:
电机一在X方向中运动。 电机二在Y方向上运动。
• 可以在进行深入设计前,让客户直观地看到产品大致的功能,预知产品的动 作节拍减少客户与生产厂家沟通上的偏差。
2
软件基础-连接
• 在普通的机械设备中动用的比较多的连接是:滑块与销。其他的连接虽然也 有但机会没有这两种多。
• 滑块-直线运动 这种连接多用于气缸、各种导轨、滑块。
销连接
刚性约 束
• 销-圆周运动 这种连接多用于电机、各种转动的关节。
CERO 3.0动作仿真
多动作同步协作-仿真
1
仿真的作用
• 使用软件对设计模型进行仿真和分析,能够模拟真实的工作环境,并可对其 进行分析,以尽早发现设计缺陷,找出动作干涉,提前进行修改,从而减少 产品开发的费用 ,缩短设计周期。
• 与设计和分析工具完全集成,从而无需再花费时间、精力和金钱来处理数据 转换和关联的错误,利用具体的动画式生产指令进行装配,可以避免代价高 昂的制造错误。
• 电机定义完成以后,可以分析了。 • 将终止时间设定成EXCEL的最后一个时间点。 • 帧频调节一下,数字越大越慢。 • 运行
9
回放
• 分析时,CERO界面不能动,不方便动态 观察各个角度。
• 使用回放,可以设定速度,并可以拖动鼠标自由 观察。使用步进功能可以逐步观察相应的位置当 然可以做成动画,不过我认为用手机拍视频,同 时拖动鼠标更好。
Creo运动仿真实例 PPT

Creo运动仿真实例
39
17
Creo运动仿真实例
18
Creo运动仿真实例
19
Creo运动仿真实例
20
Creo运动仿真实例
21
Creo运动仿真实例
22
Creo运动仿真实例
23
Creo运动仿真实例
24
Creo运动仿真实例
25
Creo运动仿真实例
26
Creo运动仿真实例
27
Creo运动仿真实例
28
Creo运动仿真实例
3、点左上角 “绘制”图标,再点“文件”——“输出EXCEL文件”。
八、绘制曲线
轨迹曲线——纸零件(选装配图或机架)——选取点——选“结果集”—
—确定
Creo运动仿真实例
37
参照下图,设计一万向连接传动机构,结构、尺寸 均自己设计确定,并装配、运动仿真、分析。
Creo运动仿真实例
38
Bye Bye
1、刚性:采用普 通装配的方式进行 约束;(自动)
2、焊接:采用坐 标系进行约束; (缺省)
Creo运动仿真实例
9
Creo运动仿真实例
10
Creo运动仿真实例
11
Creo运动仿真实例
12
Creo运动仿真实例
13
Creo运动仿真实例
14
Creo运动仿真实例
15
Creo运动仿真实例
16
Creo运动仿真实例
Creo运动仿真实例
1
Creo运动仿真实例
2
Creo运动仿真实例
3
Creo运动仿真实例
4
(装配模块)
(机构运动 仿真模块)
Creo运动仿真实例
ProE机构运动仿真.pptx

进入与退出机构模块
➢ 进入机构模块:装配环境-应用程序-机构 ➢ 退出机构模块:应用程序-标准
机构运动仿真与分析流程
装配 模型
机构 模块
机构 连接
分析 回放
伺服 电动机
分析 测量
01 02 03 04 05 06
案例流程
01
02
03
04
05
06
07
C 教学小结
教学小结
装配模型
机构环境
机构分析
一起High—Pro/E机构运动仿真
A 任务导入
任务导入
连杆机构
齿轮机构
01
03
齿轮机构
02
04
汽车引擎 蝴蝶飞舞
B 教学过程
课堂学习
有趣的人形波浪仿真,一起玩起来! 素材
知识点
操作 流程
素质 目标
机构运动仿真基础
概述
➢ 在Pro/E的的机构模块中,可以对一个机构装 置进行运动仿真分析,除了查看机构的运行状 态,检查机构运行时有无碰撞外,还能进行进 一步的位置分析、运动分析、动态分析、静态 分析和力平衡分析,为检验和进一步改进机构 的设计提供参考数据。
“ 01
“ 02
“ 03
➢ Pro/E提供多种“连接”类 型、各种连接类型允许不同 的运动自由度、每种连接类 型都与一组预定义的约束集 相关联。
➢ 定义运动副 凸轮运动副、齿轮运动副…
➢ 定义伺服电动机 电动机名称、选择从动图元、 方向、定义运动函数…
➢ 机构分析的类型 ➢ 定义机构分析 ➢ 运动回放与干涉检查
D 教学反思
教学反思
零部件组装
02
01
03
连接类型、运动副、 伺服电动机
creo机构运动仿真

连接可绕3轴进行旋转和平移运动.它没有任何方向的约束,总自由度 为6个.若要定义6DOF连接,我们需要选取零件和组件上的坐标系.
7
© 2006 PTC
拖拽
点拖动
主体拖动
拖拽 当机构连接好以后,可以通过拖拽功能,使元件间产生 相对运动.
8
© 2006 PTC
拖拽
9
© 2006 PTC
拖拽
动态图元 关于力/扭矩 力/扭矩定义
43
© 2006 PTC
动态图元
44
© 2006 PTC
机构分析与测量 机构分析
分析 回放分析 测量
45
© 2006 PTC
机构分析
46
© 2006 PTC
机构分析
47
© 2006 PTC
机构分析
48
© 2006 PTC
机构分析
关于力平衡分析
力平衡分析可求出要是机构在特定形态中保持固定不动所需的力.
定义齿轮 副属性
35
© 2006 PTC
齿轮连接范例
Large_gear.prt
Small_gear.prt
机构仿真
Gear_base.prt
操作演示
36
© 2006 PTC
动态图元
动态图元:包括伺服电机、执行电机、弹簧、重力、阻尼、力\扭矩、
定义伺服电机
定义重力 定义执行电机 定义弹簧 定义阻尼器 定义力/扭矩
27
7定义轮廓
选择速度 输入速度值
© 2006 PTC
凸轮连接的范例 8点击工具按扭
9定义分析
输入终止时间
运动
28
© 2006 PTC
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轨迹曲线——纸零件(选装配图或机架)——选取点——选“结果集”— —确定
参照下图,设计一万向连接传动机构,结构、尺寸 均自己设计确定,并装配、运动仿真、分析。
四连杆机构
一、装配 1、机架(左):缺省方式; 2、机架(右):前面、底面对齐,右面相距120; 3、曲柄、连杆:销钉; 4、摇杆:两个销钉(在“放置”页左下点“新设置”,
添加第2销钉); “应用”——“机构”,进入仿真界面 二、设置运动副(凸轮副、齿轮副) 三、设置电机
1、电机位置(类型):拾取“销钉运动副”; 2、电机大小(轮廓):速度、A为360 deg/sec。 四、调整:手形“拖动”图标,进行调整,“快照”确定当 前位置。
五、分析
1、类型:运动学; 2、终止时间:1--3 sec; 3、桢频:100-200; 4、若有“快照” ,点“快照”,“运行”。 六、回放
1、播放; 2、生成视频:在“播放”的“动画”窗口内,点“捕获”,输入“路 径”、文件名。
七、分析结果(测量):分析测量 1、新建“测量点”:测量点1(摇杆的位置)、测量点2(摇杆的速度)、 测量点3(摇杆的加速度); 2、按ctrl选多个测量点、复选“分别绘制”、选“结果集”中仿真分析名 称;
Creo运动仿真实例 PPTFra bibliotek (装配模块)
(机构运动 仿真模块)
大家学习辛苦了,还是要坚持
继续保持安静
(铰链)
(移动副) (丝杆螺母副)
(采用普通装配的方式进行约束) (垫片)
1、刚性:采用普 通装配的方式进行 约束;(自动)
2、焊接:采用坐 标系进行约束; (缺省)
SVA