搬运机械手的设计和仿真
搬运机械手仿真设计和制作_王建军
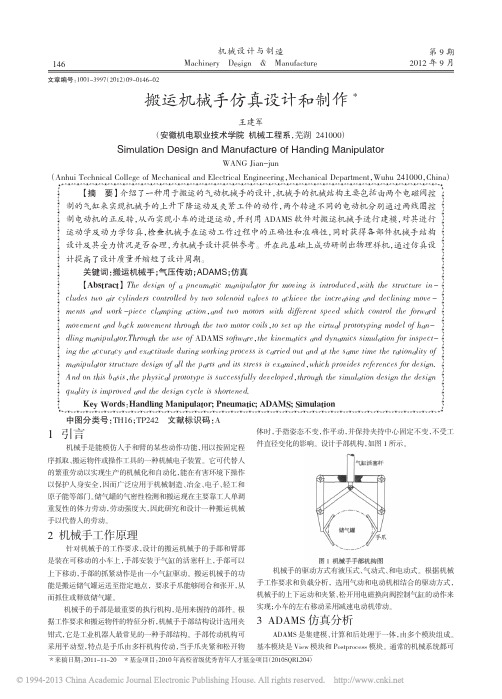
Current:117.8
92.5 0.0
1.25
2.5
(b)小气缸受力 图 4 气缸的受力情况
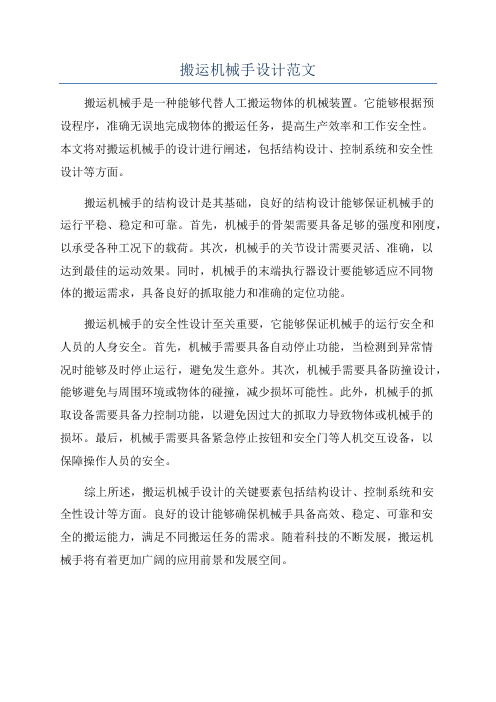
图 7 机械手工作情况
4.3 机械手工作情况
机械手工作情况,如图 7 所示。机械手的控制系统可以采用继
机械设计与制造
第9期
148
Machinery Design & Manufacture
2012 年 9 月
一小气缸驱动。设计机械手的功能是可以抓取工件后提升,小车
带动机械手移动到指定位置卸下。升降气缸即大气缸主要承载机
械手和工件的重量,总共的重量大约 400N,根据设计数据和气源
的气压并结合仿真结果,根据表 GB/T2348-1993,选取气缸内径
为:D=50mm,活塞杆内径为:选取 d=25mm。
4.2 小车车架制作
3.1 模型建立
由于机械手的总体结构比较简单,所以在 ADAMS 平台上按 照设计图建立仿真模型,如图 2 所示。
大气缸
移动滚轮
小
小气缸
车
车轮
手部结构
车轮
图 2 机械手的整体模型
3.2 运动学和动力学仿真
为了实现模拟实际机械手的工作状况,按照实际搬运件的 尺寸和重量设置,重量 20kg,直径 25cm,合理设置搬运机械手的 运动速度参数,进行探测性仿真并修改参数达到最佳效果和得出 最优数据,运动仿真过程画面,如图 3 所示。
3.3 结果分析
通过仿真可以直观的观察搬运机械手的动作过程和工作情况,
通过修改优化参数可以看出该机械手的动作可以满足作业要求。
4 机械手的设计制作
4.1 气缸选用
根据设计要求,机械手选用气动和电动机相结合的驱动方
搬运机械手设计范文
搬运机械手设计范文
搬运机械手是一种能够代替人工搬运物体的机械装置。
它能够根据预
设程序,准确无误地完成物体的搬运任务,提高生产效率和工作安全性。
本文将对搬运机械手的设计进行阐述,包括结构设计、控制系统和安全性
设计等方面。
搬运机械手的结构设计是其基础,良好的结构设计能够保证机械手的
运行平稳、稳定和可靠。
首先,机械手的骨架需要具备足够的强度和刚度,以承受各种工况下的载荷。
其次,机械手的关节设计需要灵活、准确,以
达到最佳的运动效果。
同时,机械手的末端执行器设计要能够适应不同物
体的搬运需求,具备良好的抓取能力和准确的定位功能。
搬运机械手的安全性设计至关重要,它能够保证机械手的运行安全和
人员的人身安全。
首先,机械手需要具备自动停止功能,当检测到异常情
况时能够及时停止运行,避免发生意外。
其次,机械手需要具备防撞设计,能够避免与周围环境或物体的碰撞,减少损坏可能性。
此外,机械手的抓
取设备需要具备力控制功能,以避免因过大的抓取力导致物体或机械手的
损坏。
最后,机械手需要具备紧急停止按钮和安全门等人机交互设备,以
保障操作人员的安全。
综上所述,搬运机械手设计的关键要素包括结构设计、控制系统和安
全性设计等方面。
良好的设计能够确保机械手具备高效、稳定、可靠和安
全的搬运能力,满足不同搬运任务的需求。
随着科技的不断发展,搬运机
械手将有着更加广阔的应用前景和发展空间。
搬运机械手设计范文
搬运机械手设计范文搬运机械手是一种能够取代人工进行重物搬运的机器人设备。
它可以通过各种传感器和执行器来感知和操作环境中的物体,从而实现高效、精确和安全地搬运重物。
在工业生产领域中,搬运机械手已经广泛应用,因为它不仅能够提高生产效率,还能减少工人的劳动强度和避免工伤事故。
在设计搬运机械手时,需要考虑以下几个方面:1.功能需求:首先需要明确搬运机械手的功能需求,包括搬运重物的最大负荷、工作范围、运动速度、准确定位等。
这些功能需求将决定机械手的设计参数和性能指标。
2.结构设计:搬运机械手的结构设计包括机械臂、末端执行器和控制系统。
机械臂通常由多个关节组成,每个关节都可以通过电机和减速机驱动。
机械臂的结构要求具有足够的刚度和稳定性,以保证搬运任务的精度和稳定性。
末端执行器通常为夹爪或吸盘,可以根据需要进行更换或定制。
控制系统需要包括传感器、执行器和控制算法等,以实现对机械手的精确定位和运动控制。
3.传感器选择:搬运机械手需要使用各种传感器来感知环境中的物体和位置信息。
常用的传感器包括视觉传感器、力传感器、位移传感器等。
通过使用这些传感器,机械手可以实时获取物体的位置、重量和形状等信息,从而更好地适应不同的搬运任务。
4.控制算法:搬运机械手的控制算法需要实时处理传感器反馈的数据,并根据搬运任务的需求,计算出最优的运动控制指令。
这些算法可以使用机器学习、路径规划和运动控制等技术来实现。
控制算法的设计要考虑到机械手的动力学特性和物体搬运的约束条件,以确保高效、安全和精确的搬运操作。
5.安全设计:搬运机械手在工业生产过程中承担着较重的负荷,因此安全设计至关重要。
安全设计包括机械结构的强度和稳定性、电气系统的故障保护、安全门禁和急停装置等。
此外,机械手还需要与其他设备和人员进行安全交互,以防止意外碰撞和伤害。
总之,搬运机械手设计需要考虑到功能需求、结构设计、传感器选择、控制算法和安全设计等方面。
通过合理的设计和工艺选择,可以使机械手在工业生产中发挥更大的作用,提高生产效率和质量,减少工人劳动强度,实现智能化和自动化生产。
搬运机械手毕业设计

搬运机械手毕业设计摘要本文针对工业生产中搬运过程中的自动化需求,设计了一款搬运机械手。
该机械手能够自动完成物料搬运、定位和堆放的任务,提高了生产效率和工作安全性。
设计包括机械结构、控制系统和安全保护装置。
关键词:搬运机械手、自动化、物料搬运、机械结构、控制系统、安全保护装置1.引言随着工业化进程的加快,生产线上的物料搬运工作量越来越大,传统的手工搬运方式已经无法满足需求。
自动化的搬运机械手能够代替人工完成搬运任务,提高了生产效率和工作安全性。
因此,设计一款能够实现自动化搬运的机械手对于工业生产具有重要意义。
2.设计原则(1)功能全面:能够完成不同规格、不同材料的物料搬运任务;(2)精确定位:能够精确地将物料放置到指定位置,避免人工调整;(3)堆码能力:能够实现物料的堆码操作,提高存储密度;(4)安全性保护:具备必要的安全保护装置,避免意外情况发生。
3.机械结构设计机械结构是搬运机械手的关键部分,决定了机械手的动作能力和稳定性。
设计中采用了多关节机械手的结构,能够实现六个自由度的运动,适应复杂的搬运场景。
机械手采用轻质材料制造,以提高载重能力。
4.控制系统设计控制系统是搬运机械手的智能核心,决定了机械手的动作控制能力。
控制系统由硬件和软件两个部分组成。
硬件包括传感器,执行机构和控制器,软件包括运动控制算法和路径规划算法。
通过传感器对物料位置、重量和形状进行检测,控制器可以根据检测结果对机械手进行自适应控制,完成搬运任务。
5.安全保护装置设计工业生产中机械手搬运过程中存在一定的安全风险。
设计中引入了安全保护装置,包括红外线传感器和急停按钮。
红外线传感器能够检测到人员或障碍物的接近,触发警报或停机,防止意外发生。
急停按钮可以在紧急情况下立即关闭机械手,确保生产安全。
6.实验结果和分析通过实验,验证了搬运机械手的功能和性能。
机械手能够准确地捡起、移动和堆放物料,实现了自动化搬运。
同时,安全保护装置能够有效地保护工作人员的安全,预防意外事故的发生。
基于搬运机械手设计及运动仿真研究 李斌
基于搬运机械手设计及运动仿真研究李斌摘要:机械手的运用可以在很大程度上提高生产自动化的效率,同时有助于工业领域的技术进步,可以在很大程度上代替人类劳动,进一步节省人工成本。
本文基于搬运机械手的结构,对其仿真运动的设计过程进行探究,致力于促进搬运机械手的实际运用。
关键词:运动仿真控制;变速器;搬运机械手;设计实现0引言在现代工业发展的过程中,需要结合虚度偶只能设备,其中,机械手作为可以在很大程度上节省人力资源的特殊技术载体,可以促进仿真模拟技术的发展。
同时,的功能机械手的实际运用在工业生产和一些其他的设计过程中也被高度重视,甚至被引进到现阶段的许多流水生产线中,有着良好的示范作用。
在机械手进行搬运的过程中,还可以进一步检验人工的包装的质量,帮助提高实际的搬运效率,避免耗时耗力的现象出现。
一些传统的工业搬运工作方式已经被淘汰,主要原因是无法满足今天的生活水平要求,同时也不符合我国现代经济发展规律。
机械手作为可以取代人工搬运的特殊技术载体,因其自身具备的高度自动化系统被人们赞赏,其生产模式也得到广泛的认可。
1 搬运机械手的内部结构设计分析1.1龙门架结构。
区别于其他的结构类型,这一结构主要是针对实际变速器而言的,可以在搬运的过程中,通过调节内部系统,进一步掌握实际的机械操作流程,优化结构的同时提高搬运的效率。
对变速器搬运机械手而言,在实际的搬运过程中,可以结合龙门架结构的优势,对特殊的物体进行特殊处理,一般而言,龙门式架构可以保证内部系统的安全性和完整性,同时有利于后期的设备设计和处理工作的开展。
龙门架结构的主装配线是有着明显的作用的,必须对特殊的试验线进行严格的把握,同时注重调节内部的安装机械手运动1.2主线配置。
因为变速器在试验线和主装配线中的安装位置不同,为了能够使变速器搬运机械手能够实现设置的运动,所以将翻转结构及姿态调整设置在机械手结构中,以此使变速器能够变换不同的姿势,将翻转机构及夹爪相互连接,并且设置翻转气缸,使其能够使夹爪根据中心线的正反方向进行旋转,从而能够使变速器进行旋转,姿态调整机构连接夹爪安装板,并且具备姿态调整气缸,在底部设备根据轴线进行旋转,调整变速器的姿态。
搬运机械手的设计和仿真
搬运机械手的设计和仿真搬运机械手是一种可以自动化地完成工业生产中物品搬运的机器人。
在工业自动化程度越来越高的今天,它成为了一个非常重要的设备。
在工业领域中,搬运机械手广泛应用于生产线、物流和仓储等场合,可以代替人工完成重复性、危险、繁琐的工作任务,提高工作效率和生产能力,减少损失和安全事故的发生。
搬运机械手分为多种类型,例如旋转臂式搬运机械手、平面式搬运机械手、升降框式搬运机械手等,每种机械手都有其独特的应用场合和设计特点。
例如,在生产线场合中,为了提高生产效率,要求机械手的搬运速度尽可能快,并且需要具有足够的灵活性和精度,能够协调好相互之间的运动,准确抓取和运输物品。
而在物流和仓储设备中,机械手面对的是不同形状、重量、尺寸的物品,需要根据具体情况设计适合的机械臂和抓取器,保证效率和精度。
搬运机械手的设计需要考虑到多个方面的因素,如运动控制、传动系统、力学与动力学和电子控制等方面。
在运动控制方面,需要设计合适的运动轨迹,使机器人每次搬运的动作能够有效地完成,在不同场合中需要选择合适的控制方法。
而在传动系统方面,需要选取合适的电机和传动方式,保证机械手的运动效率和精度。
在力学与动力学方面,则需要考虑机械手的耐用性和稳定性,以及机械手在运作过程中的力学特征和动力学特征,如速度和力的平衡等。
此外,在电子控制方面需要采用现代化的电子技术,包括传感器技术、电机控制技术等,使机械手具备可靠性与精准度。
在搬运机械手设计完成后,需要进行仿真验证,以确定机械手的动态特性和运动轨迹的正确性。
这样可以避免因安装错误或运动干扰等因素导致机械手动作出现不正常的情况,减少设计的风险和可靠性问题。
目前,常见的机械手仿真软件包括MATLAB、Simulink、ADAMS、SolidWorks等,其中ADAMS是一款功能强大的机械系统仿真软件,可以对机械手的运动、力学与动力学、碰撞检测等方面进行全面仿真,提高设计的可靠性和精度。
搬运机械手的设计
搬运机械手的设计首先是机械结构设计。
搬运机械手的机械结构需要具备稳定性、精确性和可靠性。
通常采用的结构包括支架结构、臂结构和夹具结构。
支架结构用来支撑机械手的整体,需要具备足够的强度和稳定性;臂结构用来实现机械手的运动,需要具备较高的精确性和灵活性;夹具结构用来夹取物品,需要具备较高的抓取力和适应性。
在设计过程中还需要考虑到机械手的尺寸、负载能力和工作半径等参数,以满足不同工作需求。
其次是电气控制设计。
搬运机械手的电气系统包括电源系统、控制系统和传感器系统。
电源系统为机械手提供所需的电力,需要考虑到电流、功率和电压等参数;控制系统用来控制机械手的运动和动作,需要采用适当的控制算法和控制器;传感器系统用来获取机械手的位置、负载和力矩等信息,需要选择适合的传感器类型和布置位置。
在设计过程中还需要考虑到电气元件的选型和布线,以保证机械手的稳定运行和安全性。
最后是软件控制设计。
搬运机械手的软件控制系统主要包括运动控制算法和任务调度算法。
运动控制算法用来使机械手实现各类运动,包括平移、旋转、抬升和倾斜等;任务调度算法用来分配机械手的各项任务,可以根据任务的紧急程度和优先级来调度机械手的工作。
在设计过程中还需要考虑到软件的编程和调试,以使机械手的运行更加准确和可靠。
综上所述,搬运机械手的设计涉及到机械结构设计、电气控制设计和软件控制设计等方面。
在设计过程中需要充分考虑到工作需求和规范要求,确保机械手的性能和安全性。
通过合理的设计和优化,可以提高搬运机械手的工作效率和可靠性,为生产过程带来更大的便利和效益。
物料抓取机械手设计及运动仿真

物料抓取机械手设计及运动仿真随着工业自动化的不断发展,越来越多的制造和加工过程采用机器人和自动化设备来完成。
其中,物料抓取机械手的设计和运动仿真对于实现自动化生产流程的高效运行具有至关重要的作用。
本文将介绍物料抓取机械手的设计要点及运动仿真的重要性,并探讨相关的问题及解决方案。
物料抓取机械手的设计首先需要确定其结构形式和基本参数。
一般而言,机械手主要由手部机构、腕部机构和臂部机构组成。
手部机构负责抓取物料,腕部机构则负责手腕的姿态调整,臂部机构支持机械手的移动。
根据实际生产需要,可在设计中针对不同的物料特性和抓取要求进行结构优化。
物料抓取机械手的运动过程中涉及到复杂的动力学关系。
因此,在设计中需要建立相应的动力学模型,以实现精确的运动控制和抓取策略。
动力学模型需要考虑重力、摩擦力、空气阻力等各种外部力的影响,同时还需要机械内部的动态特性。
物料抓取机械手的驱动系统是实现抓取动作的关键部分。
根据不同的应用场景和性能需求,可选择不同的驱动方式,如液压驱动、气压驱动、电动驱动等。
在设计中,需要根据实际情况选择合适的驱动方式和驱动元件,并综合考虑驱动系统的布局和重量等因素。
运动仿真是在设计阶段对机械系统进行模拟分析和验证的方法。
通过运动仿真,可以在实际制造之前发现和解决潜在的问题,提高机械系统的性能和质量。
在物料抓取机械手的设计中,运动仿真可用于验证结构设计、优化动力学模型以及评估抓取策略的可行性。
通过运动仿真,可以模拟机械手的实际运动过程,并精确计算出抓取时间、抓取位置、抓取力度等关键参数,为实际制造提供重要参考。
运动仿真主要通过计算机辅助设计软件来实现。
这些软件通常具有强大的建模和分析功能,可以建立详细的机械系统模型,并进行动态性能分析和优化。
一些软件还提供了与控制系统仿真工具的集成,以实现整个系统的联合仿真。
物料抓取机械手的设计及运动仿真在自动化生产中具有极其重要的意义。
通过对机械手结构的合理设计、动力学模型的精确建立以及驱动系统的优化,可以有效地提高机械手的性能和质量。
搬运机械手设计及运动仿真

搬运机械手设计及运动仿真摘要:机械手是近代自动控制领域中出现的一项新技术,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力受到人们的广泛重视和欢迎。
实践证明,机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。
此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题通过应用SolidWorks对机械手进行结构设计和液压传动原理设计,运用SolidWorks 技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。
关键词:机械手;UG;自由度;液压;自动化Abstract:Manipulator is a new technology in the field of modern automatic control, It is an imitation of part of the human upper limb function , Scheduled for delivery in accordance with the requirements of holding a work piece or tool automation technology and equipment operation , Automation of industrial production, and promote the further development of industrial production plays an important role. So it has a great vitality and thus be widely valued and welcomed. Practice has proved that the robot can replace the heavy manual labor, significantly reduced labor intensity and improve working conditions and raise the level of labor productivity and automation. That often appears in industrial production of heavy work piece handling and long-term frequent monotonous operations, the use of mechanical hand to be effective. In addition, it can at a high temperature, low temperature, Sham Shui Po, the universe, radioactive and other toxic pollution of the environment under the conditions of operation, but also to demonstrate its superiority, has broad prospects.This issue through the application of SolidWorks to proceed with the structural design of mechanical and hydraulic principles of design, technology use SolidWorks feeding robot three-dimensional solid modeling and simulation of the movement, its basic movements can be more specific in the show people before.Key Words:Manipulator;SolidWorks;degree of freedom;Hydraulic;Automation目录1 前言 (1)2 抓取机构设计 (1)2.1 手部的设计和计算 (1)2.1.1手部设计的要求 (1)2.1.2 拉紧装置原理 (2)2.2 腕部的设计计算 (4)2.3臂伸缩机构设计 (6)3 液压系统原理设计及草图 (9)3.1手部抓取缸 (9)3.2腕部摆动液压回路 (10)3.3小臂伸缩缸液压回路 (11)3.4总体系统图 (12)4 机身机座的结构设计 (13)4.1电机的选择 (13)4.2减速器的选择 (15)4.3螺柱的设计与校核 (15)5 机械手的定位与平稳性 (17)5.1常用的定位方式 (17)5.2影响平稳性和定位精度的因素 (17)5.3机械手运动的缓冲装置 (18)6 机械手的控制 (19)7 机械手的组成与分类 (20)7.1机械手组成 (20)7.2机械手分类 (21)8 机械手的三维造型及运动仿真 (23)总结 (24)致谢.............................................................. 错误!未定义书签。
轻型平动搬运机械手的设计及运动仿真
轻型平动搬运机械手的设计及运动仿真摘要随着工业自动化发展的需要,机械手在工业应用中越来越重要。
文章主要叙述了机械手的设计计算过程。
首先,本文介绍机械手的作用,机械手的组成和分类,说明了自由度和机械手整体座标的形式。
同时,本文给出了这台机械手的主要性能规格参量。
文章中介绍了搬运机械手的设计理论与方法。
全面详尽的讨论了搬运机械手的手部、腕部、手臂以及机身等主要部件的结构设计。
最后使用软件对机械手的手部实现运动仿真。
关键词:机械手;运动仿真;液压传动;液压缸;The light stable motion transports manipulator's design and the movement simulationAbstractThe applying of the manipulators are more and more important in the industry, with the development of industrial automation. The paper mainly narrated the design and calculation of light and transfer manipulator.The first,The paper introduces the function,composing and classification of the manipulator,tells out the free-degree and the form of coordinate.At the same time,the paper gives out the primary specification parameter of this manipulator.This article system elaboration industry manipulator's design theory and method. The comprehensive exhaustive discussion has transported manipulator's hand, the wrist, the arm ,the fuselage and so on ,which the major structural design computation.Finally uses the software to carry out the movement simulation for manipulator's hand.Keywords: manipulator; motion simulation; hydraulic power transmission;Hydraulic cylinder目录中文摘要 (1)英文摘要 ......................................................................................................... 错误!未定义书签。
搬运机械手的设计
搬运机械手的设计搬运机械手作为自动控制技术与机械制造技术的完美融合产物,具有高效率、高精度、高质量的特点。
其广泛应用于各行业,如物流、制造业、医疗等。
搬运机械手不仅可以简化流程,提高生产效率,还可以减少人工劳动强度,降低人力成本。
设计一款高效的搬运机械手需要从几个方面考虑:1. 应用需求分析搬运机械手的种类多样,应用领域不同。
需要深入了解应用领域,分析应用场景,确定机械手的类型、参数和规格。
例如,物流行业通常需要负重能力高、速度快、精度高的机械手,而医疗行业需要机械手精度高、安全可靠。
2. 结构设计机械手的结构设计是至关重要的一步。
机械手的结构应该简洁、稳定、紧凑,具有良好的动态刚度和准确的运动姿态。
同时需要考虑机械手的可维护性和可靠性,便于日后的保养维护和故障排除。
机械手的运动轨迹也应该经过计算和仿真,以确保运动过程的平稳和精度。
3. 控制系统设计机械手的控制系统也是设计一款机械手的重要组成部分。
控制系统应该根据机械手的运动需求选择合适的控制方式,如开环控制、闭环控制等。
控制系统要兼顾精度和速度,不断进行控制算法的优化,以达到最佳控制效果。
同时要考虑控制系统的稳定性和可靠性,特别是在高速运动过程中的控制。
4. 机械手夹具设计机械手的夹具设计也是机械手设计的重点之一。
夹具设计应根据应用场景的需求,选用合适的夹具类型和夹具结构,以保证搬运物体的稳定性和安全性。
夹具的设计还需要考虑到搬运物体的形状、重心等参数,以确保夹具可以牢固地固定住物体。
5. 安全设计机械手在搬运过程中容易产生冲撞、碰撞等安全隐患,需要在设计过程中做出安全设计。
安全设计应根据应用场景的特点,确定触发机械手安全措施的条件,如机械手运动速度、搬运物体重量等。
同时需要考虑紧急停机、防止误操作、过载保护等安全措施的实施,以最大限度地保障操作人员的安全。
综上所述,搬运机械手的设计需要全面考虑应用场景、机械手结构、控制系统、夹具设计和安全性等方面。
搬运机械手设计..

专业课程设计说明书课题名称搬运机械手及其运动仿真设计指导教师王潍学生学号20120421464学生姓名杨义学生班级机自1210班成绩设计时间2015年11月2日~2015年11月13日目录第1章课题规划 (1)1.1 课题背景分析 (1)1.2 设计任务书 (3)第2章功能分析 (4)2.1 设计任务功能分析 (4)2.1.1 总功能提炼 (4)2.1.2 功能分解 (4)2.1.3 功能结构分析及功能结构图绘制 (4)2.2 本章小结 (5)第3章系统原理方案设计 (7)3.1 功能单元求解 (7)3.1.1 分功能求解 (7)3.1.2 系统原理方案综合求解 (7)3.1.3 方案优化及评价 (7)3.2 本章小结 (7)第4章总体设计 (9)4.1 系统总体结构草图 (9)4.2 本章小结 (14)第5章总结 (15)参考文献 (17)第1章课题规划1.1课题背景分析从1954年美国人乔治·德沃尔制造出世界上第一台可编程的机械手至今,机械手已经发展了三代。
通过引导或其它方式,先教会机器人动作,输入工作程序,则会自动重复进行作业的示教再现型机械手被称为第一代机械手,而能利用传感器获取的信息控制机械手被称为第二代机械手。
而第三代机械手就是智能机器人。
对于智能机器人,尽管欧美和日本等许多国家都投入了大量人力和物力,但现在其仍然处于发展阶段。
目前对我国而言发展第一、第二代机器人更具有实际意义。
我国机械手的发展是从20世纪50年代的固定动作机械手开始的,然后经历了60年代的数控机械手,在1978年时机械手才‘真正开始得到研究和应用,到现在工业机械手与智能机器人愈来愈受到各届的的关注,并已经纳入了我国高科技规划及科技发展计划之中。
伴随着人类社会的不断发展,科学和技术的不断进步,人类对资源的依赖也越来越大,最终将不可避免的要向陆地以外甚至是地球以外的地方扩展,而在这些对人类来说恶劣的环境里,机械手的发展就显得尤为重要了。
搬运机械手仿真设计和制作
搬运机械手仿真设计和制作随着工业自动化的不断发展,搬运机械手作为一种重要的自动化设备,在工业生产中发挥着越来越重要的作用。
本文主要探讨搬运机械手的仿真设计与制作过程,以期为相关领域的研究和应用提供有益的参考。
需要根据实际应用需求确定机械结构方案。
搬运机械手需要实现哪些动作?需要抓取和搬运哪些类型的物品?针对这些问题,我们需要展开一系列的分析和研究。
在此基础上,设计出满足要求的基本结构方案,包括机械臂、抓手、驱动系统等主要部件。
为了对搬运机械手进行精确的控制,需要建立其数学模型。
数学模型能够描述机械手的运动规律,以及各部件之间的相互关系。
常用的数学模型包括运动学模型和动力学模型。
其中,运动学模型主要描述机械手的位姿和运动轨迹,动力学模型则描述机械手在运动过程中的力和速度等物理量之间的关系。
仿真程序设计是搬运机械手仿真设计的重要环节。
在这一阶段,需要选择合适的仿真软件,如Adams、Simulink等,并根据之前建立的数学模型编写仿真程序。
仿真程序需要能够模拟机械手的实际运行情况,对各种工况进行仿真测试,以验证设计的有效性和可靠性。
在仿真程序设计完成后,需要制作物理样机以验证设计效果。
根据设计方案制作机械零件,并进行组装、调试和测试。
在此过程中,需要对机械手进行不断的优化和改进,使其在抓取、搬运等操作中具有更好的稳定性和效率。
当物理样机达到预期效果后,可以进入批量生产和实际应用阶段。
搬运机械手作为一种重要的自动化设备,在工业生产中具有广泛的应用前景。
本文主要探讨了搬运机械手的仿真设计与制作过程,包括确定机械结构方案、建立数学模型、仿真程序设计、物理样机制作等方面。
通过这些环节的不断优化和改进,我们可以实现更高效、更稳定的搬运机械手设计和制作。
随着科技的不断进步,搬运机械手的应用领域越来越广泛,例如在物流、制造业、农业等领域都有应用。
未来,我们需要进一步研究和改进搬运机械手的设计和制作技术,提高其智能化、自主化和适应性等方面的性能,以更好地满足实际应用的需求。
搬运机械手(毕业设计)

4.2 操作面板设计
通过对机械手控制要求分析,其控制面板设计如下:
4.3 I/O点数确定及PLC选型
(1)根据控制要求,需要18个输入点,11个输出 点。
(2)由于此搬运机械手输入点数不多,性能要求 不高,因此选用欧姆龙的CPM2A-40CDR-A小 型可编程控制器,即可满足要求。
4.4 PLC外部接线图设计
• 姓 名:学生 • 专 业:机械设计制造及其自动化 • 指导老师:老师 • 设计时间:2011.4.1——2011.6.10
目录
1、搬运机械手总体结构设计 2、搬运机械手机械结构设计 3、搬运机械手液压系统设计 4、搬运机械手控制系统设计
1、搬运机械手总体结构设计
(1)该机械手采用圆柱坐标型,具有三个自由度,即 手臂的伸长、缩短和整体旋转。
2.5 机械手整体机械结构设计
1.1 手爪及夹紧液压缸设计
本次设计的搬运机械手手爪采用滑槽杠杆式结构,夹紧缸采用单作 用弹簧复位式结构,其结构如下所示:
1. 2 伸缩液压缸设计
伸缩缸可以使搬运机械手伸长或者缩短,其结构如下所示:
1.3 升降液压缸设计
升降缸可以使搬运机械手上升或者下降,其结构如下所示:
•
安全在于心细,事故出在麻痹。20.10.2420.10.2403:55:1003:55:10October 24, 2020
•
踏实肯干,努力奋斗。2020年10月24日上午3时55分 20.10.2420.10.24
•
追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2020年10月24日星期 六上午3时55分 10秒03:55:1020.10.24
•
严格把控质量关,让生产更加有保障 。2020年10月 上午3时 55分20.10.2403:55Oc tober 24, 2020
(完整版)搬运机器人设计

搬运机器人设计班级:姓名:学号:搬运机器人能够模仿人手部的部分动作,按照设定的程序、轨迹和要求,代替人工在高温和危险的作业区进行单调持久的作业,实现一些人工不可能完成的工作,这不仅可以使人手避免出现可能的危险情况,保障生产安全,还能促进工作线的流水化,提高了工作效率,降低了劳动强度,改善了劳动环境,已经成为现代制造业中不可或缺的一种自动化装置。
本机器人用于生产线上工件的自动搬运,下图为机器人动作示意图,机械手按下述顺序周而复始地工作:根据对机器人的工艺过程及控制要求分析,机械手的动作过程如图所示:一、搬运机械手总体结构设计(1)该机器人采用圆柱坐标型,具有三个自由度,即手臂的伸长、缩短,手臂的上升、下降和整体旋转。
(2)该机器人采用液压驱动,其具有体积小、质量轻、结构紧凑、传动平稳、操作简单、安全、经济、易于实现过载保护且液压元件能够自行润滑等一系列优点。
(3)在控制方式选择上,由于其功能只是在两个传送带之间搬移工件,运动简单,控制要求不高,因此采用点位控制方式。
(4)此搬运机器人是在两个工作台之间搬运工件,其动作比较简单,选用电位器进行定位。
(5)此机器人应用于自动生产线上,因此,它应该能够按照控制程序自动运行,即具有自动运行模式。
二、搬运机械手机械结构设计1、机身设计因为圆柱坐标式机器人把回转与升降两个自由度归属于机身,所以设计回转与升降机身,选用旋转液压缸与升降液压缸单独驱动的回转型机身,如图1所示,升降液压缸在上,旋转液压缸在下。
2、臂部设计采用双导向杆的臂部伸缩结构。
缸体直接固定在升降立柱上,活塞杆与两根导向杆连接一起组成伸缩臂,由于活塞杆与导向杆全部藏在缸体内,油管也从活塞杆内部通过,其特点是结构紧凑,外观整洁。
结构如图2所示。
3、手部腕部设计因为工件的形状为圆柱形,所以带“V”型钳口的手爪,本次设计的搬运机器人手爪采用滑槽杠杆式结构,夹紧缸采用单作用弹簧复位式结构,杠杆端部固定安装着圆柱销,当拉杆向上拉时,圆柱销就在两个钳爪的滑槽中移动,带动钳爪绕两支点回转,夹紧工件;拉杆向下推时,使钳爪松开工件。
机械手设计及运动仿真说明书
搬运机械手结构设计及运动仿真摘要机械手可谓是自动手,能够模仿手等的部分工作一些功能,根据处理对象固定的程序还是爬行,操作工具自动运行装置。
机械手起到很多作用,简答来说可以能够取代人的复杂劳动,来实现生产活动的机械化及自动化,也可以在不良环境下运作,起到保护人身安全的作用,因为这方面的要求我们可以将机械手应用于机械制造中锻造方面、冶金方面、电子方面等部门,将机械手运用这些方面可以提高生产效率等。
本课题要求是通常圆柱坐标系设计的搬运机械手。
论文中是对对机械手的功能、分类及进行了叙述,并通过该论文设计要求,对机械手的手、腕、臂以及机身的结构方面的设计及计算和液压传动原理方面设计,使其能实现自动上料、腕部旋转、手臂伸展、机身旋转及升降等动作,并运用Pro/E对搬运机械手的工作过程进行机构运动仿真。
通过运动仿真对机械手的结构设计有个比较详细的了解,能够更好让机械手广泛运用于工业方面。
关键词机械手;液压传动;机械手结构设计;运动仿真Handling Robot Design and Motion SimulationAbstractManipulator can be described as automatic hand, can mimic some of the features hands and other parts of the work, according to the processing target fixed procedure or crawling, operating tool automatically run devices. Robot plays many roles, it may be able to replace short-answer people's complex labor to mechanization and automation of production activities, and can also operate in adverse environments, protect the personal safety role because this requirement, we can The robot used in machinery manufacturing in terms of forging, metallurgy, electronics and other departments, the robot can use these areas to improve production efficiency.The requirements of the subject is generally cylindrical coordinate system designed handling robot. Paper is a mechanical hand function, classification and has been described, and by the paper design requirements, design and calculation of structures of the robot's hand, wrist, arm, and body and hydraulic drive principle aspects of the design, so that it can automatic feeding, wrist rotation, arm extension, rotation and lifting and other body movements, and the use of Pro / E for the handling of the robot motion simulation work processes. By motion simulation to design the robot has a more detailed understanding, better able to make the robot widely used in industry.Keywords manipulator; hydraulic transmission; hand structure design; motion simulation目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题背景 (1)1.2 研究意义 (2)1.3 国内外研究现状分析 (3)1.4 研究的主要内容及方法 (3)1.5 工业机械手的分类,基本形式及组成 (4)1.5.1 工业机械手的分类 (4)1.5.2 工业机械手的基本形式 (4)1.5.3 基本组成 (6)1.6 本章小结 (9)第2章搬运机械手总体设计方案 (10)2.1 搬运机械手设计参数 (10)2.2 搬运机械手基本形式的选择 (11)2.3 驱动机构的选择..................................................... 错误!未定义书签。
包装生产线搬运机械手设计

包装生产线搬运机械手设计一、设计背景在现代的工业生产中,包装生产线上通常需要大量的物料搬运和包装操作。
传统的人工搬运存在效率低下、产能受限等问题,因此需要引入机械手进行自动化搬运操作,以提高生产效率和质量。
二、设计目标设计一种具有高效、稳定、灵活性好的包装生产线搬运机械手,以满足以下要求:1.能够准确、稳定地抓取和放置各种形状、大小的物体。
2.能够适应不同速度和位置的自动包装生产线。
3.具备较高的自动化程度,减少人工干预。
4.结构紧凑,易于安装和维修。
5.具备安全保护功能,避免人员和设备的伤害。
三、机械手结构设计1.控制系统:采用PLC程序控制机械手的各项动作,保证操作的稳定性和准确性。
2.运动系统:采用直线导轨和伺服电机控制机械手的升降、伸缩、旋转运动,并结合测距传感器实现自适应调整和位置精准定位。
3.夹持系统:采用气动夹具和电磁吸盘,根据不同物体的特点,实现不同的夹持方式,确保抓取和放置物体的稳定性和安全性。
4.增强视觉系统:配备高精度视觉传感器和图像处理系统,能够实时识别和跟踪物体,并根据物体的位置和形状进行相应的搬运动作。
5.安全保护系统:设置紧急停止按钮、安全围栏和传感器,确保机械手在操作过程中不会对人员和设备造成伤害。
四、工作流程设计1.启动机械手:通过控制系统将机械手从待机状态切换到工作状态。
2.目标识别:通过视觉系统对待搬运的物体进行识别和跟踪,并获取物体的位置和形状信息。
3.抓取物体:根据识别到的物体信息,控制机械手进行夹持动作,确保将物体稳定抓取。
4.运动调整:根据物体的位置信息,控制机械手进行升降、伸缩、旋转等运动调整,以适应不同的搬运需求。
5.物体搬运:将抓取到的物体准确地放置到目标位置上。
6.循环工作:机械手根据设定的程序,在包装生产线上进行循环的搬运任务,直到所有物体搬运完毕。
7.停止机械手:完成搬运任务后,机械手返回待机状态,等待下一次工作任务。
五、结构优化设计根据实际使用情况和需要1.调整夹具和吸盘的形状和大小,以适应不同物体特点的搬运。
搬运机械手设计说明
搬运机械手设计说明一、引言搬运机械手是一种用来替代人工进行搬运工作的机器装置。
它能够自动化地完成搬运、装卸、堆码等工作,提高生产效益、减少劳动强度,并且能适应各种环境和工作场合。
本设计说明旨在介绍一款搬运机械手的设计原理、结构及工作流程。
二、设计原理1.机械传动原理:采用电机驱动系统,通过齿轮、链条、皮带等传动装置将电机的旋转运动转换为机械手运动,实现搬运、举升等功能。
2.传感器原理:通过激光、红外线、压力传感器等传感器,实时感知物体的位置、形状、质量等参数,并将这些信息传输给控制系统。
3.控制系统原理:采用单片机或PLC控制系统,根据传感器反馈的信息,对机械手的动作进行控制和调整,实现精确的搬运操作。
三、结构设计1.底座:底座是机械手的支撑和固定部分,通常采用铸造或焊接工艺制作,保证机械手的稳定性和刚性。
2.臂架:臂架由多个可调节的关节构成,用于支撑和控制机械手的运动,臂架材料可以选用铝合金等轻质材料,以提高机械手的灵活性和运动速度。
3.夹具:夹具是机械手与被搬运物体直接接触的部分,通常采用夹爪或磁力吸盘等形式,以实现对物体的抓取和释放。
4.末端执行器:末端执行器是机械手的最后一段,可以根据具体需求选用吸盘、夹爪、工件接触面等不同形式,以适应不同尺寸、重量和形状的物体。
四、工作流程1.运动控制:通过操纵系统控制机械手的关节运动,将机械手移动到目标位置。
2.物体感应:通过传感器感知被搬运物体的位置、形状、质量等信息。
3.夹持物体:根据物体的尺寸和形状,选择合适的夹具进行夹持。
4.搬运操作:机械手将物体从起始位置移动到目标位置,并根据需要进行旋转、举升等动作。
5.放置物体:机械手将物体安放到目标位置,并释放夹具。
五、安全考虑在设计搬运机械手时,需要考虑以下安全因素:1.机械手运动范围的限定,避免碰撞或损坏设备。
2.夹具的设计要保证夹持力度适中,既要夹持住物体,又不能造成物体损坏。
3.传感器的准确性和可靠性,确保机械手能够准确感知物体的位置、形状等信息。
毕业设计答辩-搬运机械手的设计

创新点和特色
创新点
本次设计的搬运机械手在以下几个方面进行了创新:一是采用了气动驱动方式,具有节 能环保、安全可靠的特点;二是采用了可编程控制方式,能够实现自动化控制和远程监
控;三是手部结构可根据实际需求进行快速更换,提高了机械手的适应性和扩展性。
特色
本次设计的搬运机械手具有以下特色:一是结构简单紧凑,易于维护和保养;二是操作 简便,可快速上手;三是具有良好的扩展性和兼容性,可根据实际需求进行定制和升级。
毕业设计答辩-搬运机械手的设计
目录
• 介绍 • 搬运机械手的设计方案 • 设计和实现过程 • 测试和验证 • 总结和展望
01
介绍
主题概述
搬运机械手是一种自动化设备, 用于在生产线上快速、准确地搬
运物品。
它通常由一系列连杆、关节和抓 取器组成,能够模拟人类手臂的
运动。
搬运机械手的设计涉及机械、电 子、控制等多个领域,是现代工
明显延迟。
搬运测试
在搬运测试中,机械手能够稳定 地将目标物体从一个位置搬运到 指定位置,无抖动或偏离现象。
定位测试
定位测试中,机械手能够准确 地将目标物体放置在指定位置 ,误差在可接受范围内。
分析
通过对测试结果的分析,我们发 现搬运机械手的设计基本达到了 预期目标,各项功能表现良好。
结果的可靠性和有效性
软硬件实现
软件开发
根据控制系统的需求,开发了相 应的控制软件,实现了机械手的
自动化控制和监测。
硬件搭建
根据设计方案,选购了合适的硬件 设备,如PLC、电机、传感器等, 并进行了合理的布局和连接。
系统调试
在完成软硬件搭建后,进行了系统 调试,确保机械手能够按照预期工 作,并对存在的问题进行了优化和 改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主要符号表N F 手指夹紧力 ND 弹簧中径 mm1D 弹簧内径 mm2D弹簧外径 mm C弹簧旋绕比 n弹簧有效圈数 M转动缸的回转力矩 N m ⋅ ρ偏重力臂 mm M 偏偏重力矩 N m ⋅ t螺钉间距 mm 0Q F螺钉承受的拉力 N Q F工作载荷 N 's Q F预紧力N φ启转动缸起动角 度 ω转动缸转动角速度 rad s1 绪论1 绪论1.1前言机械手。
机械手是模仿着人手的部分动作,用于再现人手的的功能的技术装置称为[]1按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用工业机械手。
的机械手被称为[]2工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。
机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
工业机械手是近几十年发展起来的一种高科技自动生产设备。
工业机械手也是工业机器人的一个重要分支。
他的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。
机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。
机械手的发展是由于它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的机具进行焊接和装配,从而大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。
因而,受到很多国家的重视,投入大量的人力物力来研究和应用。
尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。
在我国近几年也有较快的发展,并且取得一定重视。
的效果,受到机械工业的[]3机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。
机械手的结构形式开始比较简单,专用性较强。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
1.2 工业机械手的简史现代工业机械手起源于20世纪50年代初,是基于示教再现和主从控制方式、能适应产品。
产品种类变更,具有多自由度动作功能的柔性自动化[]4机械手首先是从美国开始研制的。
1958年美国联合控制公司研制出第一台机械手。
他的结构是:机体上安装一回转长臂,端部装有电磁铁的工件抓放机构,控制系统是示教型的。
1962年,美国机械铸造公司在上述方案的基础之上又试制成一台数控示教再现型机械手。
商名为Unimate(即万能自动)。
运动系统仿造坦克炮塔,臂回转、俯仰,用液压驱动;控制系统用磁鼓最存储装置。
不少球坐标式通用机械手就是在这个基础上发展起来的。
同年该公司和普鲁曼公司合并成立万能自动公司(Unimaton),专门生产工业机械手。
1962年美国机械铸造公司也试验成功一种叫Versatran机械手,原意是灵活搬运。
该机械手的中央立柱可以回转,臂可以回转、升降、伸缩、采用液压驱动,控制系统也是示教再现型。
虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学、麻省理工学院联合研制一种Unimate-Vic-arm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差可小于±1毫米。
美国还十分注意提高机械手的可靠性,改进结构,降低成本。
如Unimate公司建立了8年机械手试验台,进行各种性能的试验。
准备把故障前平均时间(注:故障前平均时间是指一台设备可靠性的一种量度。
它给出在第一次故障前的平均运行时间),由400小时提高到1500小时,精度可提高到±0.1毫米。
德国机器制造业是从1970年开始应用机械手,主要用于起重运输、焊接和设备的上下料等作业。
德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。
瑞士RETAB公司生产一种涂漆机械手,采用示教方法编制程序。
瑞典安莎公司采用机械手清理铸铝齿轮箱毛刺等。
日本是工业机械手发展最快、应用最多的国家。
自1969年从美国引进二种典型机械手后,大力研究机械手的研究。
据报道,1979年从事机械手的研究工作的大专院校、研究单位多达50多个。
1976年个大学和国家研究部门用在机械手的研究费用42%。
1979年日本机械手的产值达443亿日元,产量为14535台。
其中固定程序和可变程序约占一半,达222亿日元,是1978年的二倍。
具有记忆功能的机械手产值约为67亿日元,比1978年增长50%。
智能机械手约为17亿日元,为1978年的6倍。
截止1979年,机械手累计产量达56900台。
在数量上已占世界首位,约占70%,并以每年50%~60%的速度增长。
使用机械手最多的是汽车工业,其次是电机、电器。
预计到1990年将有55万机器人在工作。
第二代机械手正在加紧研制。
它设有微型电子计算机控制系统,具有视觉、触觉能力,甚至听、想的能力。
研究安装各种传感器,把感觉到的信息反馈,使机械手具有感觉机能。
目前国外已经出现了触觉和视觉机械手。
第三代机械手(机械人)则能独立地完成工作过程中的任务。
它与电子计算机和电视设备保持联系。
并逐步发展成为柔性制造系统FMS(Flexible Manufacturing system)和柔性制造单元(Flexible Manufacturing Cell)中重要一环。
随着工业机器手(机械人)研究制造和应用的扩大,国际性学术交流活动十分活跃,欧美各国和其他国家学术交流活动开展很多。
1.3工业机械手在生产中的应用机械手是工业自动控制领域中经常遇到的一种控制对象。
机械手可以完成许多工广泛。
作,如搬物、装配、切割、喷染等等,应用非常广泛[]5在现代工业中,生产过程中的自动化已成为突出的主题。
各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。
可在机械工业中,加工、装配等生产很大程度上不是连续的。
据资料介绍,美国生产的全部工业零件中,有75%是小批量生产;金属加工生产批量中有四分之三在50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。
从这里可以看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而产生的。
目前在我国机械手常用于完成的工作有:注塑工业中从模具中快速抓取制品并将制品传诵到下一个生产工序;机械手加工行业中用于取料、送料;浇铸行业中用于提取高温熔液等等。
本文以能够实现这类工作的搬运机械手为研究对象。
下面具体说明机械手在工业方面的应用。
1.3.1 建造旋转零件(转轴、盘类、环类)自动线一般都采用机械手在机床之间传递零件。
国内这类生产线很多,如沈阳永泵厂的深井泵轴承体加工自动线(环类),大连电机厂的4号和5号电动机加工自动线(轴类),上海拖拉机厂的齿坯自动线(盘类)等。
加工箱体类零件的组合机床自动线,一般采用随行夹具传送工件,也有采用机械手的,如上海动力机厂的气盖加工自动线转位机械手。
1.3.2 在实现单机自动化方面各类半自动车床,有自动加紧、进刀、切削、退刀和松开的功能,单仍需人工上下料;装上机械手,可实现全自动化生产,一人看管多台机床。
目前,机械手在这方面应用很多,如上海柴油机厂的曲拐自动车床和座圈自动车床机械手,大连第二车床厂的自动循环液压仿行车床机械手,沈阳第三机床厂的Y38滚齿机械手,青海第二机床厂的滚铣花键机床机械手等。
由于这方面的使用已有成功的经验,国内一些机床厂已在这类产品出厂是就附上机械手,或为用户安装机械手提供条件。
如上海第二汽车配件厂的灯壳冲压生产线机械手(生产线中有两台多工位机床)和天津二注塑机有加料、合模、成型、分模等自动工作循环,装上机械手的自动装卸工件,可实现全自动化生产。
目前机械手在冲床上应用有两个方面:一是160t以上的冲床用机械手的较多。
如沈阳低压开关厂200t环类冲床磁力起重器壳体下料机械手和天京拖拉机厂400t冲床的下料机械手等;其一是用于多工位冲床,用作冲压件工位间步进轻局技术研究所制作的120t和40t多工位冲床机械手等。
1.3.3 铸、锻、焊热处理等热加工方面模锻方面,国内大批量生产的3t、5t、10t模锻锤,其所配的转底炉,用两只机械手成一定角度布置早炉前,实现进出料自动化。
上海柴油机厂、北京内燃机厂、洛阳拖拉机厂等已有较成熟的经验。
1.4 机械手的组成组成。
工业机械手由执行机构、驱动机构和控制机构三部分组成[]61.4.1 执行机构(1)手部既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。
手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于吸冷的,光滑表面的零件或薄板零件)和电磁吸盘。
传力机构形式教多,常用的有:滑槽杠杆式、连杆杠杆式、斜槭杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式。
(2)腕部是连接手部和臂部的部件,并可用来调节被抓物体的方位,以扩大机械手的动作范围,并使机械手变的更灵巧,适应性更强。
手腕有独立的自由度。
有回转运动、上下摆动、左右摆动。
一般腕部设有回转运动再增加一个上下摆动即可满足工作要求,有些动作较为简单的专用机械手,为了简化结构,可以不设腕部,而直接用臂部运动驱动手部搬运工件。
目前,应用最为广泛的手腕回转运动机构为回转液压(气)缸,它的结构紧凑,灵巧但回转角度小(一般小于 2700),并且要求严格密封,否则就难保证稳定的输出扭距。
因此在要求较大回转角的情况下,采用齿条传动或链轮以及轮系结构。
(3)臂部手臂部件是机械手的重要握持部件。
它的作用是支撑腕部和手部(包括工作或夹具),并带动他们做空间运动。
臂部运动的目的:把手部送到空间运动范围内任意一点。
如果改变手部的姿态(方位),则用腕部的自由度加以实现。
因此,一般来说臂部具有三个自由度才能满足基本要求,即手臂的伸缩、左右旋转、升降(或俯仰)运动。
手臂的各种运动通常用驱动机构(如液压缸或者气缸)和各种传动机构来实现,从臂部的受力情况分析,它在工作中既受腕部、手部和工件的静、动载荷,而且自身运动较为多,受力复杂。
因此,它的结构、工作范围、灵活性以及抓重大小和定位精度直接影响机械手的工作性能。
(4)行走机构有的工业机械手带有行走机构,我国的正处于仿真阶段。
1.4.2 驱动机构驱动机构是工业机械手的重要组成部分。