1_S3C2410-GPIO_步进电机实验
实验2S3C2410GPIO控制实验

实验2 S3C2410GPIO控制实验一、实验目的1.熟悉ADS1.2 开发环境,正确使用仿真调试电缆进行编译、下载、调试。
2.了解S3C2410 的通用I/O 接口,3.掌握I/0 功能的复用并熟练的配置,4.对相应I/0接口进行编程实验,控制实验箱LED 灯点亮。
二、实验设备硬件:UP-TECH S2410/P270 DVP 嵌入式实验平台、PC 机Pentium 500 以上, 硬盘10G 以上。
软件:PC 机操作系统REDHAT LINUX 9.0+超级终端(或X-shell)+ARM-LINUX 开发环境。
三、预备知识S3C2410 CPU 共有117个多功能复用输入输出口,分为8组端口:●4个16位的I/O端口(PORT C、PORT D、PORT E、PORT G)●2个11位的I/O端口(PORT B 和PORT H)●1个8位的I/O端口(PORT F)●1个23位的I/O端口(PORT A)这些通用的GPI/O接口,是可配置的, PORTA除功能口外,它们仅用作输出使用,剩下的PORTB、PORTC、PORTD、PORTE、PORTF、PORTG均可作为输入输出口使用。
配置这些端口,是通过一些寄存器来实现的,这些寄存器均有各自的地址,位长32位。
往该地址中写入相应的数据,即可实现功能及数据配置。
GPACON (0x56000000) //Port A controlGPADAT (0x56000004) //Port A dataGPBCON (0x56000010) //Port B controlGPBDAT (0x56000014) //Port B dataGPBUP (0x56000018) //Pull-up control BGPCCON (0x56000020) //Port C controlGPCDAT (0x56000024) //Port C dataGPCUP (0x56000028) //Pull-up control CGPDCON (0x56000030) //Port D control GPDDAT (0x56000034) //Port D data GPDUP (0x56000038) //Pull-up control D GPECON (0x56000040) //Port E control GPEDAT (0x56000044) //Port E data GPEUP (0x56000048) //Pull-up control E GPFCON (0x56000050) //Port F control GPFDAT (0x56000054) //Port F data GPFUP (0x56000058) //Pull-up control F GPGCON (0x56000060) //Port G control GPGDAT (0x56000064) //Port G data GPGUP (0x56000068) //Pull-up control G GPHCON (0x56000070) //Port H control GPHDAT (0x56000074) //Port H data GPHUP (0x56000078) //Pull-up control H 现用C口举例说明。
实验1GPIO控制实验
实验1 GPIO控制实验1.1 实验目的¾了解S3C2440的GPIO的分组和特点¾了解S3C2440的GPIO的工作模式和寄存器配置方法¾了解S3C2440的GPIO硬件连接原理¾掌握S3C2440的GPIO的使用方法1.2 实验内容¾使用C语言配置GPIO口的相应寄存器¾编写C语言程序,通过GPIO有规律的输出高低电平来控制一组LED的亮灭1.3 实验设备¾PC机¾TE2440开发板(配套5V,2A直流电源)¾ULINK2仿真器(配套USB线)¾交叉串口线1.4 实验原理1 GPIO介绍GPIO(General-Purpose IO ports),通用的IO端口。
一般的微处理器芯片都提供通用的可编程IO端口,用户可以通过配置寄存器将其配置成输入、输出或者其他特殊功能模式。
通用IO端口一般都可以实现按位操作,即用户可以针对IO端口的每一位(以下简称IO位)进行操作。
S3C2440有130个多功能复用的IO端口,分为端口A~J,共9组,如下所示。
z端口A(GPA),23位输出口z端口B(GPB),11位输入/输出口z端口C(GPC),16位输入/输出口z端口D(GPD),16位输入/输出口z端口E(GPE),16位输入/输出口z端口F(GPF),8位输入/输出口z端口G(GPG),16位输入/输出口z端口H(GPH),11位输入/输出口z端口J(GPJ),13位输入/输出口其中,GPA只能用作输出口或者其他特殊功能,GPB-GPJ可以用作输入、输出或者其他特殊功能。
所有IO端口都有相应的配置寄存器,包括端口控制寄存器、端口数据寄存器和端口上拉寄存器,在程序运行之前必须对每个用到的IO端口进行配置。
¾端口控制寄存器S3C2440的端口控制寄存器分别为GPACON-GPJCON。
解读:GPACON寄存器中的每一位对应GPA端口的每一个IO位(对应一个引脚),当某位被设为0时,相应引脚为输出引脚,此时可以向GPA 端口写入数据来让对应的引脚输出高低电平。
步进电动机实验报告

一、实验目的1. 了解步进电动机的工作原理和驱动方式。
2. 掌握步进电动机的驱动电路设计方法。
3. 熟悉步进电动机的控制程序编写和调试方法。
4. 掌握步进电动机的速度和方向控制方法。
二、实验器材1. 步进电动机一台2. 步进驱动器一台3. 单片机实验板一块4. 电源模块一块5. 连接线若干6. 示波器一台7. 电脑一台三、实验原理步进电动机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是输出角位移与输入脉冲数成正比,转速与脉冲频率成正比。
步进电动机的驱动电路主要由驱动器和控制电路组成。
驱动器负责将单片机输出的脉冲信号转换为步进电动机所需的驱动信号,而控制电路则负责生成步进电动机所需的脉冲信号。
四、实验步骤1. 步进电动机驱动电路设计(1)根据步进电动机的型号和规格,选择合适的驱动器。
(2)设计驱动电路原理图,包括驱动器、单片机、电源模块等。
(3)焊接驱动电路,并检查无误。
2. 步进电动机控制程序编写(1)编写步进电动机控制程序,包括初始化、脉冲生成、速度和方向控制等模块。
(2)通过示波器观察脉冲信号的波形,确保脉冲信号符合步进电动机的要求。
(3)调试程序,确保步进电动机能够按照预期运行。
3. 步进电动机速度和方向控制(1)通过调整脉冲频率控制步进电动机的转速。
(2)通过改变脉冲信号的顺序控制步进电动机的转动方向。
(3)观察步进电动机在不同速度和方向下的运行情况,分析控制效果。
五、实验结果与分析1. 步进电动机驱动电路设计成功,步进电动机能够按照预期运行。
2. 步进电动机控制程序编写成功,能够实现速度和方向控制。
3. 通过调整脉冲频率,步进电动机的转速在0-300转/分钟范围内可调。
4. 通过改变脉冲信号的顺序,步进电动机的转动方向可在正转和反转之间切换。
5. 实验结果表明,步进电动机的速度和方向控制方法可行,控制效果良好。
六、实验总结本次实验成功地实现了步进电动机的驱动电路设计、控制程序编写和速度、方向控制。
基于S3C2410X PWM步进电机控制设计
《嵌入式系统》课程设计说明书基于S3C2410X PWM步进电机控制应用开发系、部:计算机与信息科学系组成员:李传颂李佳文潘应成马永光指导教师:秦辉职称:讲师专业:计算机科学与技术班级:计本0803完成时间:2011年12月12日摘要嵌入式的应用正在不断深入和创新,作为一门我们专业相当重要的专业课程,同时带动着传统控制检测日新月异的更新。
此次设计利用实验室中试验箱以S3C2410x作为内核进行调试和创新,其中对S3C2410X的试验箱开发板、S3C2410X 的PWM、步进电机工作原理、系统硬件设计、软件设计及其仿真调试过程都做了详细的介绍,使我们组的每个成员不仅对步进电机的原理有了深入的了解,也对嵌入式的设计研发过程以及知识的学习都有了很深刻的体会和提高。
本控制系统的设计采用实验室中的试验箱S3C2410x PWM控制,通过S3C2410X的中断系统来实现步进电机的转动以及转动的加速度等功能,另外还增加可设正反转的功能,具有灵活方便、使用范围广又易懂的特点,能够满足实现自身实践动手能力提高的需求。
通过此次课程设计,增进对嵌入式强大功能的认识,对提高学习能力有着深远意义。
关键字嵌入式;S3C2410X;PWM;步进电机目录1 开发环境及系统结构 (1)1.1 开发环境 (1)1.2 S3C2410X处理器介绍 (1)2.2.1 2410体系结构 (1)2.2.2 2410实验箱底板规格: (2)1.3系统结构 (3)2 基于S3C2410X PWM步进电机控制应用开发 (4)2.1 PWM介绍 (4)2.1.1 PWM定时器概述 (4)2.1.2 S3C2410X定时器特性 (4)2.1.3 PWM定时器操作示例 (5)3.1.4 PWM定时器寄存器 (6)2.2 基于S3C2410X PWM步进电机的硬件开发 (9)2.2.1 系统设计要求与方案确定 (9)2.2.2 PWM步进电机驱动电路设计 (9)2.3 基于S3C2410X PWM步进电机的软件开发 (11)2.3.1程序流程图 (11)2.3.2 应用程序设计 (11)2.3.3 功能测试 (29)3 总结 (30)参考文献 (31)1 开发环境及系统结构1.1 开发环境硬件:Embest EduKit-III实验平台,Embest ARM标准、增强型仿真器套件,即ARM2410实验箱,PC,步进电机。
实验五 GPIO输出控制实验
实验五 GPIO输出控制实验1.实验目的:①.掌握DeviceARM2410专用工程模板的使用;②.掌握Wiggler Jtag仿真器的安装和使用;③.能够在MagicARM2410实验箱上运行第一程序(无操作系统);④.熟悉S3C2410处理器的I/O配置及GPIO输出控制;⑤.熟悉嵌入式系统开发流程。
2.实验设备①.硬件:PC机一台(要求有并口)MagicARM2410教学实验开发平台一套②.软件:Window98/XP/2000系统ADS1.2集成开发环境H-JTAG3.实验内容控制 MagicARM2410 实验箱上的 LED1~LED4 显示及蜂鸣器报警。
先使用片外SDRAM(HY57V561620 芯片)进行调试,调试通过后将程序固化到片外 NOR FLASH (SST39 VF1601 芯片),脱机运行程序。
4.实验预习要求(1)仔细阅读S3C2410A的 GPIO模块说明。
(2)了解 MagicARM2410 实验箱的硬件结构,注意独立LED及蜂鸣器控制电路。
(3)了解 ADS 1.2 集成开发环境、DeviceARM2410 专用工程模板、EasyJTAG-H仿真器的应用。
5.实验原理S3C2410A 具有117 个通用 I/O 口,分为 A~H 等 8 个端口,由于每个 I/O 都有第两个功能,甚至第三功能,所以需要通过设置 GPxCON 寄存器来选择 GPx 口 I/O 的功能,其中 x可以为 A、B、C、D、E、F、G、H,表示相应的 I/O端口。
当 I/O 设置为 GPIO 输出模式(Output 模式)时,可以通过写 GPxDAT 控制相应 I/O 口输出高电平或低电平。
GPxDAT 为 1 的位对应 I/O输出高电平,为 0 的位对应 I/O输出低电平。
⊙如何在 MagicARM2410 实验箱上运行第一个程序?具体操作步骤如下:(1)添加 DeviceARM2410 专用工程模板。
第6章 S3C2410系统接口操作原理及实验

Transmit Mode
Receive Mode
UCONn的含义
位
描述
[10]
0:PLK 做比特率发生 1:ULK 做比特率发生
[9]
0:Tx 中断脉冲触发 1:Tx 中断电平触发
[8]
0:Rx 中断脉冲触发 1: Rx 中断电平触发
1.S3C2410X I/O口常用的控制寄存器
(1)端口控制寄存器(GPACON-GPHCON)。 (2)端口数据寄存器(GPADAT-GPHDAT)。 (3)端口上拉寄存器(GPBUP-GPHUP)。 (4)外部中断控制寄存器(EXTINTN)。
表6-1
寄存器 GPFCON GPFDAT GPFUP Reserved
嵌入式系统技术与设计
第6章 S3C2410系统接口 操作原理及实验
6.1
ARM体系结构的特点
6.2
ARM处理器工作模式
6.3
寄存器组织
6.4
流水线
6.5
ARM存储系统
6.6
异常
6.7
ARM处理器的寻址方式
6.8
ARM处理器的指令集
6.9
ARM处理器的指令集
在第5章接口电路的基础上,本章讲解该 系统的各接口原理,并辅以实验代码加以说明。 通过本章,读者能掌握S3C2410处理器的常用 接口开发。
6.1.3 实验内容
编写程序,控制实验平台的发光二极管 LED1、LED2、LED3、LED4,使它们有规律地 点亮和熄灭,具体顺序如下:LED1亮→LED2亮 →LED3亮→LED4亮→LED1灭→LED2灭→LED3 灭→LED4灭→全亮→全灭,如此反复。
S3c2410电路设计(以北京博创s3c2410-s实验箱为例讲解)

17
印刷电路板的设计
电源质量与分配
电源分配
实际的工程应用和理论都证实,电源的分配对系统的稳定性有很 大的影响,因此,在设计印刷电路板时,要注意电源的分配问题。
在印刷电路板上,电源的供给一般采用电源总线(双面板)或电 源层(多层板)的方式。电源总线由两条或多条较宽的线组成,由 于受到电路板面积的限制,一般不可能布得过宽,因此存在较大的 直流电阻,但在双面板得设计中也只好采用这种方式了,只是在布 线的过程中,应尽量注意这个问题。 在多层板的设计中,一般使用电源层的方式给系统供电。该方式 专门拿出一层作为电源层而不再在其上布信号线。由于电源层遍及 电路板的全面积,因此直流电阻非常的小,采用这种方式可有效的 降低噪声,提高系统的稳定性。
32
33
LCD与触摸屏
从CPU 的LCD 控制器出来的信号线包括24 根数据线和若 干根控制线。对于256色LCD 只需要其中低8 位数据线即可。 这些信号线是经过74HC245 隔离后接到LCD 模块的,接 256 色屏时也由245 芯片完成电平转换。8 位LCD 模块除 了需要控制信号和数据信号外,还需要一个22V 左右的工 作电压和上千伏的背光电压。前者由MAX629 升压后得到, 后者由一个逆变器模块提供。另外LCD 信号线驱动芯片 74HC245 的电源是可选的,当使用5V 电平的256 色彩屏 时该芯片电源使用5V,使用3.3V 的16 位真彩屏选择3.3V。 (2410-S可以安装5#的伪彩屏和8#的真彩屏)。
芯片在工作时有一定的发热是正常的,但如果有芯片特 别发烫,则一定有故障存在,需断电检查确认无误后方可继 续通电调试。
20
硬件系统的调试
电源、晶振及复位电路调试
调试电源电路之前,尽量少接器件,通电之前检查有无 短路现象
南昌大学 嵌入式 实验报告 实验三

学生姓名: xx 学号: x3 专业班级:xx班实验类型:□验证 综合□设计□创新实验日期:实验成绩:综合实验三触摸屏控制一、实验项目名称触摸屏控制二、实验目的了解触摸屏的基本工作原理,学会s3c2410ADC的配置三、实验基本原理:通过设置GPIO口及液晶触摸屏控制器等相关寄存器来达触摸相应菜单键来控制直流步进电机的转动,加速减速和改变方向,并同步超级终端。
程序思路和部分代码:1. 本次实验主要是设置触摸屏中断和ADC转换中断来实现将触摸屏触点转换成坐标。
在写下笔中断和抬笔中断时一定要在最开始写rINTSUBMSK |= (BIT_SUB_ADC|BIT_SUB_TC);来禁止ADC中断和触摸屏中断,否则按下一次有可能会多次中断,这是不允许的。
2. 实验通过在中断中处理AD转换后的坐标值,并设置了一个全局变量,通过改变这个全局变量的值达到不同的效果。
通过比较液晶屏上规划好的各个触摸范围,来跳转到相应的功能。
其具体函数如下://左上角按钮表示步进电机加速if(point_adcx>=0&&point_adcx<=500&&point_adcy>=0&&point_a dcy<=300){step_delay=step_delay-1;学生姓名: xx 学号: x3 专业班级:xx班实验类型:□验证 综合□设计□创新实验日期:实验成绩:UART_SendStr("电机加速");sprintf(disp_buf, "delay is %d \n", step_delay);UART_SendStr(disp_buf);if(step_delay<=1)step_delay=1;}//上中角按钮表示步进电机减速if(point_adcx>=0&&point_adcx<=500&&point_adcy>=300&&point _adcy<=600){step_delay=step_delay+1;UART_SendStr("电机减速");sprintf(disp_buf, "delay is %d \n", step_delay);UART_SendStr(disp_buf);if(step_delay>=10)step_delay=10;}//右上角按钮表示步进电机正反转if(point_adcx>=0&&point_adcx<=500&&point_adcy>=600){sprintf(disp_buf, "STEP_Motoflag is %d \n", STEP_Motoflag);UART_SendStr(disp_buf);学生姓名: xx 学号: x3 专业班级:xx班实验类型:□验证 综合□设计□创新实验日期:实验成绩:if(STEP_Motoflag==0)STEP_Motoflag=1;else STEP_Motoflag=0;DelayNS(50); // 停止步进电机,延时UART_SendStr("步进电机正反转\n");sprintf(disp_buf, "STEP_Motoflag is %d \n", STEP_Motoflag);UART_SendStr(disp_buf);//左下角按钮表示直流电机加速if(point_adcx>=500&&point_adcy>=0&&point_adcy<=300){pwm_duty= pwm_duty + 255/6; // 改变当前电机的速度if(pwm_duty>255){pwm_duty = 255/6;}rTCMPB0 = pwm_duty;UART_SendStr("直流电机加速");}//下中角按钮表示直流电机减速if(point_adcx>=500&&point_adcy>=300&&point_adcy<=600)学生姓名: xx 学号: x3 专业班级:xx班实验类型:□验证 综合□设计□创新实验日期:实验成绩:{pwm_duty= pwm_duty - 255/6; // 改变当前电机的速度级别if(pwm_duty<10){ pwm_duty = 255;}rTCMPB0 = pwm_duty;UART_SendStr("直流电机减速");}//右下角按钮表示直流电机正反转if(point_adcx>=500&&point_adcy>=600){if(DC_Motoflag==0)DC_Motoflag=1;else DC_Motoflag=0;UART_SendStr("直流电机正反转");}四、主要仪器设备及耗材实验箱一台,PC机一台,JTAG一个。
s3c2410_gpio_cfgpin等内核导出函数

s3c2410_gpio_cfgpin等内核导出函数2011-06-29 23:45:34| 分类:嵌入式驱动| 标签:|字号大中小订阅s3c2410_gpio_cfgpin等内核导出函数收藏//这里面的函数都是内核导出函数/plat-s3c24XX/gpio.c中#include <linux/kernel.h>#include <linux/init.h>#include <linux/module.h>#include <linux/interrupt.h>#include <linux/ioport.h>#include <linux/io.h>#include <mach/hardware.h>#include <mach/gpio-fns.h>#include <asm/irq.h>#include <mach/regs-gpio.h>//设置gpio的工作模式,是输入,输出还是其他的//s3c2410_gpio_cfgpin(S3C2410_GPB(5),S3C2410_GPIO_INPUT),就是设置GPB5为输入模式void s3c2410_gpio_cfgpin(unsigned int pin, unsigned int function){void __iomem *base = S3C24XX_GPIO_BASE(pin);unsigned long mask;unsigned long con;unsigned long flags;if (pin < S3C2410_GPIO_BANKB) {mask = 1 << S3C2410_GPIO_OFFSET(pin);} else {mask = 3 << S3C2410_GPIO_OFFSET(pin)*2;}switch (function) {case S3C2410_GPIO_LEAVE:mask = 0;function = 0;break;case S3C2410_GPIO_INPUT:case S3C2410_GPIO_OUTPUT:case S3C2410_GPIO_SFN2:case S3C2410_GPIO_SFN3:if (pin < S3C2410_GPIO_BANKB) {function -= 1;function &= 1;function <<= S3C2410_GPIO_OFFSET(pin);} else {function &= 3;function <<= S3C2410_GPIO_OFFSET(pin)*2;}}/* modify the specified register wwith IRQs off */local_irq_save(flags);con = __raw_readl(base + 0x00);con &= ~mask;con |= function;__raw_writel(con, base + 0x00);local_irq_restore(flags);}EXPORT_SYMBOL(s3c2410_gpio_cfgpin);//作用:返回对应的GPIO的配置情况,例如pin=s3c2410_GPB5,则unsigned int s3c2410_gpio_getcfg(unsigned int pin){void __iomem *base = S3C24XX_GPIO_BASE(pin);unsigned long val = __raw_readl(base);if (pin < S3C2410_GPIO_BANKB) {val >>= S3C2410_GPIO_OFFSET(pin);val &= 1;val += 1;} else {val >>= S3C2410_GPIO_OFFSET(pin)*2;val &= 3;}return val | S3C2410_GPIO_INPUT;}EXPORT_SYMBOL(s3c2410_gpio_getcfg);//设置相应的GPIO的上拉电阻,当to为1时候,相应的pin引脚设置为1,表示该GPIO 要上拉电阻,to为0时候,相应的pin引脚配置为0,表示不要上拉电阻void s3c2410_gpio_pullup(unsigned int pin, unsigned int to){void __iomem *base = S3C24XX_GPIO_BASE(pin);unsigned long offs = S3C2410_GPIO_OFFSET(pin);unsigned long flags;unsigned long up;if (pin < S3C2410_GPIO_BANKB)return;local_irq_save(flags);up = __raw_readl(base + 0x08);up &= ~(1L << offs);up |= to << offs;__raw_writel(up, base + 0x08);local_irq_restore(flags);}EXPORT_SYMBOL(s3c2410_gpio_pullup);int s3c2410_gpio_getpull(unsigned int pin){void __iomem *base = S3C24XX_GPIO_BASE(pin);unsigned long offs = S3C2410_GPIO_OFFSET(pin);if (pin < S3C2410_GPIO_BANKB)return -EINVAL;return (__raw_readl(base + 0x08) & (1L << offs)) ? 1 : 0;}EXPORT_SYMBOL(s3c2410_gpio_getpull);//当GPIO的工作为输入时候,设置某个GPIO的值//s3c2410_gpio_setpin(S3C2410_GPB(5),0),设置GPB5的输入值是0,就是低电平,to为1,表示该pin输出为1void s3c2410_gpio_setpin(unsigned int pin, unsigned int to){void __iomem *base = S3C24XX_GPIO_BASE(pin);unsigned long offs = S3C2410_GPIO_OFFSET(pin);unsigned long flags;unsigned long dat;local_irq_save(flags);dat = __raw_readl(base + 0x04);dat &= ~(1 << offs);dat |= to << offs;__raw_writel(dat, base + 0x04);local_irq_restore(flags);}EXPORT_SYMBOL(s3c2410_gpio_setpin);//当GPIO为输出模式时候,获取GPIO的输出数值//s3c2410_gpio_getpin(S3C2410_GPB(5)),获取GPB5的输出值unsigned int s3c2410_gpio_getpin(unsigned int pin){void __iomem *base = S3C24XX_GPIO_BASE(pin);unsigned long offs = S3C2410_GPIO_OFFSET(pin);return __raw_readl(base + 0x04) & (1<< offs);}EXPORT_SYMBOL(s3c2410_gpio_getpin);unsigned int s3c2410_modify_misccr(unsigned int clear, unsigned int change) {unsigned long flags;unsigned long misccr;local_irq_save(flags);misccr = __raw_readl(S3C24XX_MISCCR);misccr &= ~clear;misccr ^= change;__raw_writel(misccr, S3C24XX_MISCCR);local_irq_restore(flags);return misccr;}EXPORT_SYMBOL(s3c2410_modify_misccr);int s3c2410_gpio_getirq(unsigned int pin){if (pin < S3C2410_GPF(0) || pin > S3C2410_GPG(15))return -EINVAL; /* not valid interrupts */if (pin < S3C2410_GPG(0) && pin > S3C2410_GPF(7))return -EINVAL; /* not valid pin */if (pin <。
传感器驱动和测试程序
#include <linux/delay.h>
#include <linux/miscdevice.h>
#include <linux/irq.h>
#include <asm/irq.h>
#include <linux/interrupt.h>
#include <asm/uaccess.h>
return ret;
}
button_class = class_create(THIS_MODULE, DEVICE_NAME);
if(IS_ERR(button_class))
{
printk("Err: failed in tope-leds class. \n");
return -1;
}
device_create(button_class, NULL, MKDEV(BUTTON_MAJOR, 0), NULL, DEVICE_NAME);
printk(DEVICE_NAME " initialized\n");
return 0;
}
static void __exit tope_buttons_exit(void)
{
unregister_chrdev(BUTTON_MAJOR, DEVICE_NAME);
device_destroy(button_class, MKDEV(BUTTON_MAJOR, 0));
S3C2410_GPB5_OUTP,
S3C2410_GPB6_OUTP,
S3C2410_GPB8_OUTP,
s3c2410基础实验教程
GPFDAT=(GPFDAT&0xFFFFFF0F)|0xD0; delay(0x1ffff);
GPFDAT=(GPFDAT&0xFFFFFF0F)|0xB0; delay(0x1ffff);
GPFDAT=(GPFDAT&0xFFFFFF0F)|0x70; delay(0x1ffff); } }
6.实验过程
程序运行后,结果和实验一相同,LED 灯不断闪烁。
4
实验 3 外部中断实验
1. 实验目的:
z 了解 S3C2410 外部中断的工作原理。 z 掌握 S3C2410 外部中断的使用方法。
2. 实验设备
z PC 机、JTAG 调试板、S3C2410 开发板。
3. 实验内容
z 通过外部按键(K10)触发外部中断 0(EINT0)。
int Main() {
int x=0; //时钟、端口、串口初始化 SetClockDivider(1, 1); SetSysFclk(DFT_FCLK_VAL); Port_Init();
Uart_Select(0); Uart_Init(0, UART_BAUD);
2
GPFCON=(GPFCON|0xFF00)&0xFFFF55FF;//GPF4--GPF7 设置为 output GPFUP|=0xFF00; //disable GPF pull up while(1) { GPFDAT=(GPFDAT&0xFFFFFF0F)|0xE0; Delay(200); __asm //嵌入汇编指令 {
sub r3,r3,#1 cmp r3,#0x0 bne delay4 b ledloop1 mov pc,lr
END
控制步进电机实验报告(3篇)

第1篇一、实验目的1. 理解步进电机的工作原理及控制方法。
2. 掌握单片机与步进电机驱动模块的接口连接方法。
3. 学习使用C语言编写程序,实现对步进电机的正反转、转速和定位控制。
4. 通过实验,加深对单片机控制系统的理解。
二、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是控制精度高、响应速度快、定位准确。
步进电机控制实验主要涉及以下几个方面:1. 步进电机驱动模块:常用的驱动模块有ULN2003、A4988等,它们可以将单片机的数字信号转换为步进电机的控制信号。
2. 单片机:单片机是整个控制系统的核心,负责接收按键输入、处理数据、控制步进电机驱动模块等。
3. 步进电机:步进电机分为单相、双相和三相等类型,本实验使用的是双相四线步进电机。
三、实验设备1. 单片机开发板:例如STC89C52、STM32等。
2. 步进电机驱动模块:例如ULN2003、A4988等。
3. 双相四线步进电机。
4. 按键。
5. 数码管。
6. 电阻、电容等元件。
7. 电源。
四、实验步骤1. 硬件连接(1)将步进电机驱动模块的输入端(IN1、IN2、IN3、IN4)分别连接到单片机的P1.0、P1.1、P1.2、P1.3口。
(2)将按键的输入端连接到单片机的P3.0口。
(3)将数码管的段选端连接到单片机的P2口。
(4)将步进电机驱动模块的电源端连接到电源。
(5)将步进电机连接到驱动模块的输出端。
2. 编写程序(1)初始化单片机I/O端口,设置P1口为输出端口,P3.0口为输入端口,P2口为输出端口。
(2)编写按键扫描函数,用于读取按键状态。
(3)编写步进电机控制函数,实现正反转、转速和定位控制。
(4)编写主函数,实现以下功能:a. 初始化数码管显示;b. 读取按键状态;c. 根据按键状态调用步进电机控制函数;d. 更新数码管显示。
3. 调试程序(1)将程序烧写到单片机中;(2)打开电源,观察数码管显示和步进电机运行状态;(3)根据需要调整程序,实现不同的控制效果。
单片机步进电机实验报告
单片机步进电机实验报告单片机步进电机实验报告引言:步进电机是一种常见的电机类型,具有精准控制和高效能的特点,广泛应用于各种领域。
本实验旨在通过单片机控制步进电机的转动,探索步进电机的原理和应用。
一、实验目的本实验的目的是通过单片机控制步进电机的转动,深入了解步进电机的工作原理和控制方法。
二、实验原理步进电机是一种按照一定的步进角度进行转动的电机。
它通过电磁场的变化来驱动转子转动,具有高精度和高可靠性。
步进电机的原理主要包括两种类型:磁场定向型和磁场消除型。
在本实验中,我们将重点研究磁场定向型步进电机。
三、实验器材本实验所需的器材包括:步进电机、单片机开发板、电源、电路连接线等。
四、实验步骤1. 连接电路:将步进电机的相线分别连接到单片机开发板的输出引脚上,同时将电源连接到步进电机的电源输入端。
2. 编写程序:使用C语言编写单片机控制步进电机的程序,通过控制输出引脚的电平变化来实现步进电机的转动。
3. 烧录程序:将编写好的程序烧录到单片机开发板上。
4. 调试程序:通过调试程序,观察步进电机的转动情况,并进行必要的调整和优化。
5. 实验记录:记录步进电机的转动角度、转速、电流等相关数据,并进行分析和总结。
五、实验结果与分析通过实验,我们成功地实现了单片机对步进电机的控制。
通过调整程序中输出引脚的电平变化,我们可以控制步进电机的转动方向和速度。
在实验过程中,我们观察到步进电机的转动角度与输入信号的脉冲数目成正比,这与步进电机的工作原理相符。
六、实验总结本实验通过单片机控制步进电机的转动,加深了对步进电机的理解和应用。
步进电机作为一种精密控制设备,具有广泛的应用前景。
通过学习和实践,我们不仅掌握了步进电机的原理和控制方法,还培养了动手实践和解决问题的能力。
七、实验心得通过本次实验,我深刻认识到步进电机在自动化控制领域的重要性。
步进电机具有精确控制和高效能的特点,广泛应用于机械、电子、仪器仪表等领域。
在实验过程中,我不仅学到了理论知识,还通过实践掌握了步进电机的控制方法和调试技巧。
嵌入式Linux初级实验s3c2410 中
第三篇基础实验篇本篇内容Linux设备驱动概述★LED实例★按键中断实例★数码管实例★4*4键盘实例★LCD实例★触摸屏实例★本篇目标了解Linux设备驱动的相关概念及开发基础★掌握简单字符设备驱动的程序结构及设计流程★学习嵌入式Linux中断机制及其驱动程序结构★学习数码管的显示原理及其驱动程序的设计方法★熟悉键盘驱动原理,学会为自己的系统添加键盘设备驱动程序★了解移植LCD显示设备驱动及触摸屏输入设备驱动的过程★本篇实例实例一:LED驱动及测试实例★实例二:按键中断驱动及测试实例★实例三:数码管实例★实例四:4*4键盘实例★实例五:LCD驱动移植实例★实例六:触摸屏驱动移植实例★第8章Linux设备驱动概述在前一篇中,我们介绍了开发嵌入式Linux的基本过程,本章开篇在前一篇的基础上进行设备驱动程序的开发,使得目标板上的硬件资源为板上系统所用,这也是所有设备驱动的巨大贡献。
本章将带领你走进Linux设备驱动开发的世界。
本章首先介绍的是设备驱动的作用及其分类,不同驱动程序的特点等,然后介绍驱动模块的加载和卸载方式等。
8.1 设备驱动的角色任何计算机系统的运行都是系统中软硬件相辅相成的结果,没有硬件的软件是空中楼阁,而没有软件的硬件则只是一堆的电子元器件而已。
硬件是底层基础,是所有软件得以运行的平台,程序最终会实现为硬件上的逻辑电路;软件则是具体应用的实现,根据不同的业务需求而设计。
硬件一般是固定的,软件则很灵活,可以适应各种复杂多变的应用。
从某种程度上来看,计算机系统的软硬件相互成就了对方。
但是,软硬件之间同样存在着悖论,那就是软件和硬件不应该互相渗透入对方的领地。
为尽可能快速地完成设计,应用软件工程师不想也不必关心硬件,而硬件工程师也难有足够的闲暇和能力来顾及软件。
譬如,应用软件工程师在调用套接字发送和接收数据包的时候,他不必关心网卡上的中断、寄存器、存储空间、I/O端口、片选以及其他任何硬件词汇;在使用scanf()函数获取输入的时候,他不用知道底层究竟是怎样把终端设备的操作转化成程序输入的。
S3C2410 GPIO C语言跑马灯实验

实验2 S3C2410 GPIO C语言跑马灯实验一、实验目的掌握S3C2410 通用I/O口的特点,用法和C语言编程技巧,以及MDK GPIO的可视化配置方法,理解S3C2410启动代码中和GPIO有关的程序段。
二、实验预备知识熟悉UP-NETARM2410实验箱的结构,S3C2410的外设接口电路,熟悉MDK编程软件的使用方法,熟悉C语言程序设计的一般方法。
三、实验内容编写程序编译并下载到UP-NETARM2410实验箱S3C2410的Nand型Flash芯片K9F1208中,使得GPC5/GPC6/GPC7上所接的三个LED循环亮灭。
四、参考程序程序1(无S3C2410。
H)1 #define GPCDA T_ADDR (*(volatile unsigned int *)0x56000024)2 #define LED1_MASK 0x203 #define LED2_MASK 0x404 #define LED3_MASK 0x8056 void Delay(int n)7 {8 int i,j;9 for(i=0;i<n;i++)10 {11 for(j=0;j<n;j++)12 {13 }14 }15 }1617 int main()18 {19 int nLED;20 nLED = 0;21 while(1)22 {23 nLED = 0;24 nLED ^=(LED2_MASK | LED3_MASK);// LED1 light25 GPCDA T_ADDR = nLED;26 Delay(0x300);2728 nLED = 0;29nLED ^=(LED1_MASK | LED3_MASK);// LED2 light30 GPCDA T_ADDR = nLED;31 Delay(0x300);3233 nLED = 0;34 nLED ^=(LED1_MASK | LED2_MASK);// LED3 light35 GPCDA T_ADDR = nLED;36 Delay(0x300);3738 }3940 }建议用程序2程序2(有S3C2410。
S3C2410 GPIO
ADDR19
–
–
GPA3
Output only
ADDR18
–
–
GPA2
Output only
ADDR17
–
–
GPA1
Output only
ADDR16
–
–
GPA0
Output only
ADDR0
–
–
PortBSelectablePinFunctions
GPB10
Input/output
O
X轴正端开关控制信号
XMON
O
X轴负端开关控制信号
nYPON
O
Y轴正端开关控制信号
YMON
O
Y轴负端开关控制信号
USB主设备
DN [1:0]
IO
USB主设备的DATA (–)信号(需接下拉电阻15K)
DP [1:0]
IO
USB主设备的DATA (+)信号(需接下拉电阻15K)
USB从设备
PDN0
IO
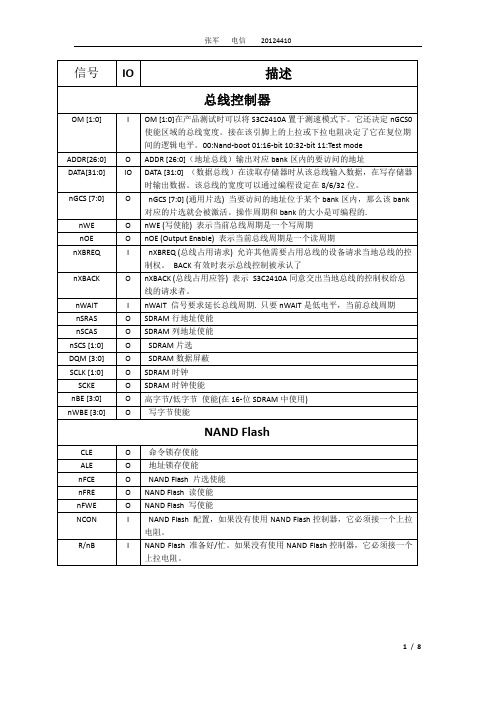
nWAIT
I
nWAIT信号要求延长总线周期.只要nWAIT是低电平,当前总线周期
nSRAS
O
SDRAM行地址使能
nSCAS
O
SDRAM列地址使能
nSCS[1:0]
O
SDRAM片选
DQM [3:0]
O
SDRAM数据屏蔽
SCLK [1:0]
O
SDRAM时钟
SCKE
O
SDRAM时钟使能
nBE[3:0]
O
高字节/低字节使能(在16-位SDRAM中使用)
O
SD时钟
General Port
实验1 S3C2410启动程序实验

IMPORT FIQStack
InitStacks
;Don't use DRAM,such asstmfd,ldmfd......
;SVCstack is initialized before
;Under toolkit ver 2.50, 'msr cpsr,r1' can be used instead of 'msr cpsr_cxsf,r1'
2.找到Startup.s文件并打开,阅读汇编语言代码,理解其中的向量定义语句和各常量及变量定义语句。
3.按图1-1所示点击Make按钮编译工程,之后点击Debug按钮启动AXD调试界面,运行调试该代码,采用单步和设断点的方式,观察各指令的运行结果。
图1-1
4.进入AXD调试环境后,在代码区域点击鼠标右键,显示图1-2的菜单项,选择其中的Disassembly项,进入反汇编状态,可以查看各异常向量的向量地址、各程序标号的地址值、去除伪指令后的实际代码。以后每执行一条语句会自动切换回源代码状态,如果需要查看地址要按同样的方法重新切换到反汇编状态。
strr1,[r0]
ldrr0,=INTSUBMSK
ldrr1,=0x7ff;all sub interrupt disable, 2002/04/10
strr1,[r0]
;****************************************************
;*Initialize stacks*
答:UHAL.c
汇编程序的标号与C语言的函数名称之间的关系是:
汇编程序的标号与C语言的函数名称相同
3、说明WTCON、INTMSK、INTSUBMSK几个常量的来源文件,写出其定义语句。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
➢ 步进电机具有瞬间启动和急速停止的优越性。 ➢ 改变脉冲的顺序,可以方便的改变转动方向。
步进电机参数
在SeaARM9系统中,我们选用四相混合型步进电机。其技术参数如下: (1)步距角:7.5度; (2)每转所需步数:48步; (3)步距角精度:±7%; (4)额定电压,相电流:12V,286mA; (5)工作温度:-30°C~80°C (6)转动力距:>600g.cm
式。 端口数据寄存器GPADAT~GPHDAT: • 如果端口配置为输出口,那么用户向相应的IO口写入希望的数据; • 如果端口配置为输入口,那么用户可以从I/O口读出对应管脚的数据。 端口上拉寄存器GPBUP~GPHUP: • 这些寄存器控制着相应端口上拉功能的使能与禁能。 • 当某位=0,对应管脚的上拉寄存器使能; • 当某位=1,对应管脚的上拉寄存器禁能;
该步进电机消耗电流大约为300mA左右,采用ULN2003驱动电路,它本身 就是一个反相器,本模块的电路原理如下图所示。
步进电机控制实验
3.实验原理 SeaARM2410实验箱上的步进电机为四相步进电机,电 机步距角为7.5度。 S3C2410A的GPIO驱动能力有限,必须通过ULN2003 达 林顿集成驱动芯片驱动步进电机,在步进电机和驱动电 路之间连接了电阻,防止控制紊乱造成电机的损坏;
Lθ=360 /(P×N) 式中:Lθ为步长,P为相数,N为转子齿数。在图9.17中,步长为15°,表示电机转 一圈需要24步。
步进电机特性
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。 在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的 频率和脉冲数,而不DA)
? (CB)
3
0011 (AB)
? (BA)
4
0110 (BC)
? (AD)
5
1100 (CD)
? (DC)
步进电机控制实验
5.相关寄存器 rGPECON:选择GPIO功能 rGPEDAT:数据寄存器,设置IO口电平值 rGPEUP:上拉寄存器
步进电机控制实验
6.思考题 • 如何控制步进电机反转?
谢谢大家!
树立质量法制观念、提高全员质量意 识。20. 10.2120 .10.21 Wednes day , October 21, 2020 人生得意须尽欢,莫使金樽空对月。0 7:23:06 07:23:0 607:23 10/21/2 020 7:23:06 AM 安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20. 10.2107 :23:060 7:23Oc t-2021- Oct-20 加强交通建设管理,确保工程建设质 量。07:23:0607 :23:060 7:23W ednesd ay , October 21, 2020 安全在于心细,事故出在麻痹。20.10. 2120.1 0.2107:23:0607 :23:06 October 21, 2020 踏实肯干,努力奋斗。2020年10月21 日上午7 时23分 20.10.2 120.10. 21 追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2 020年1 0月21 日星期 三上午7 时23分 6秒07:23:0620 .10.21 严格把控质量关,让生产更加有保障 。2020 年10月 上午7时 23分20 .10.210 7:23Oc tober 21, 2020 作业标准记得牢,驾轻就熟除烦恼。2 020年1 0月21 日星期 三7时23 分6秒0 7:23:06 21 October 2020 好的事情马上就会到来,一切都是最 好的安 排。上 午7时23 分6秒 上午7时 23分07 :23:062 0.10.21 一马当先,全员举绩,梅开二度,业 绩保底 。20.10. 2120.1 0.2107:2307:23 :0607:2 3:06Oc t-20 牢记安全之责,善谋安全之策,力务 安全之 实。202 0年10 月21日 星期三7 时23分 6秒We dnesday , October 21, 2020 相信相信得力量。20.10.212020年10月 21日星 期三7 时23分6 秒20.1 0.21
GPIO
杂类控制寄存器:MISCCR DCLK控制寄存器:DCLKCON 外部中断控制寄存器:EXTIN0~EXTIN2 外部中断过滤寄存器:EINTFLT0~EINTFLT3 外部中断掩码寄存器:EINTMASK 外部中断悬挂寄存器:EINTPEND 通用状态寄存器:GSTATUS0~GSTATUS4
步进电机控制实验
3.实验原理 • 实验电路图
步进电机控制实验
4.实验内容
• 通过4个GPIO输出有序的矩形脉冲,控制ULN2003驱动四相步进电 机实现正转,调速的功能;
• 顺时针控制的方法: 采用双四拍( AB—BC—CD—DA—AB);
通电顺序(ABCD)
顺时针
逆时针
1
1100 (CD)
? (DC)
每一种端口都能由软件自由配置以满足不同的设计要求,即都具有管脚复用的 功能,除了特殊功能外,都可以作为通用I/O功能。
GPIO
2.端口控制描述 端口配置寄存器GPACON~GPHCON: • S3C2410A中,大多数管脚都是复用的。该寄存器就是用来设置用户选用的管脚功能。 • GPF0~GPF7和GPG0~GPG7用于唤醒POWER-OFF模式,所以这些端口必须配置为中断模
GPIO-步进电机控制实验
主要内容: • 熟悉s3c2410a的GPIO基本功能和设置方法。 • 掌握步进电机的驱动原理。 • 掌握如何利用GPIO功能控制步进电机。
GPIO
1.简介
S3C2410具有117个多功能输入/输出端口。分别是: • GPIO A:23个输出端口; • GPIO B:11个输入输出口; • GPIO C:16个输入输出口; • GPIO D:16个输入输出口; • GPIO E:16个输入输出口; • GPIO F: 8个输入输出口; • GPIO G:16个输入输出口; • GPIO H:11个输入输出口;
谢谢大家!
树立质量法制观念、提高全员质量意 识。20. 10.2120 .10.21 Wednes day , October 21, 2020 人生得意须尽欢,莫使金樽空对月。0 7:23:06 07:23:0 607:23 10/21/2 020 7:23:06 AM 安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20. 10.2107 :23:060 7:23Oc t-2021- Oct-20 加强交通建设管理,确保工程建设质 量。07:23:0607 :23:060 7:23W ednesd ay , October 21, 2020 安全在于心细,事故出在麻痹。20.10. 2120.1 0.2107:23:0607 :23:06 October 21, 2020 踏实肯干,努力奋斗。2020年10月21 日上午7 时23分 20.10.2 120.10. 21 追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2 020年1 0月21 日星期 三上午7 时23分 6秒07:23:0620 .10.21 严格把控质量关,让生产更加有保障 。2020 年10月 上午7时 23分20 .10.210 7:23Oc tober 21, 2020 作业标准记得牢,驾轻就熟除烦恼。2 020年1 0月21 日星期 三7时23 分6秒0 7:23:06 21 October 2020 好的事情马上就会到来,一切都是最 好的安 排。上 午7时23 分6秒 上午7时 23分07 :23:062 0.10.21 一马当先,全员举绩,梅开二度,业 绩保底 。20.10. 2120.1 0.2107:2307:23 :0607:2 3:06Oc t-20 牢记安全之责,善谋安全之策,力务 安全之 实。202 0年10 月21日 星期三7 时23分 6秒We dnesday , October 21, 2020 相信相信得力量。20.10.212020年10月 21日星 期三7 时23分6 秒20.1 0.21
(提示:逆时针:时序控制为 BA―AD―DC―CB―BA 即可) • 怎么修改才能提高步进电机的转速?
树立质量法制观念、提高全员质量意 识。20. 10.2120 .10.21 Wednes day , October 21, 2020 人生得意须尽欢,莫使金樽空对月。0 7:23:06 07:23:0 607:23 10/21/2 020 7:23:06 AM 安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20. 10.2107 :23:060 7:23Oc t-2021- Oct-20 加强交通建设管理,确保工程建设质 量。07:23:0607 :23:060 7:23W ednesd ay , October 21, 2020 安全在于心细,事故出在麻痹。20.10. 2120.1 0.2107:23:0607 :23:06 October 21, 2020 踏实肯干,努力奋斗。2020年10月21 日上午7 时23分 20.10.2 120.10. 21 追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2 020年1 0月21 日星期 三上午7 时23分 6秒07:23:0620 .10.21 严格把控质量关,让生产更加有保障 。2020 年10月 上午7时 23分20 .10.210 7:23Oc tober 21, 2020 作业标准记得牢,驾轻就熟除烦恼。2 020年1 0月21 日星期 三7时23 分6秒0 7:23:06 21 October 2020 好的事情马上就会到来,一切都是最 好的安 排。上 午7时23 分6秒 上午7时 23分07 :23:062 0.10.21 一马当先,全员举绩,梅开二度,业 绩保底 。20.10. 2120.1 0.2107:2307:23 :0607:2 3:06Oc t-20 牢记安全之责,善谋安全之策,力务 安全之 实。202 0年10 月21日 星期三7 时23分 6秒We dnesday , October 21, 2020 相信相信得力量。20.10.212020年10月 21日星 期三7 时23分6 秒20.1 0.21