关于徕卡水准仪i角的检验与调校
bxyh%cso水准仪的I角的检验与调校
、.~①我们‖打〈败〉了敌人。
②我们‖〔把敌人〕打〈败〉了。
1.数年的经验告诉我们,水准仪仅仅是i角的正常变化不属于保修范围,恳请不要邮寄千里之外厂家仪器维修中心调节,请用户或我们当地服务中心工作人员协助测定与调整。
2.水准仪产生i角变化的原因是仪器本身的结构与外业工作条件的变化而致,仪器中的十字丝是固定在上下的V形槽中,下面的V形槽由弹簧支撑着,上面是一个压紧调节螺丝。
由于因内部与外界环境条件的变化,如温度、湿度、震动的变化它会产生i角微小的变化,或者,由于其它内应力的变化而产生不同程度的变化也是不足为奇的。
3.在用户说明书中已明确,水准仪的i角可由用户自行调整。
请参照水准仪说明书自行调整。
4.什么是水准仪的i角?水准仪的视准轴在垂直方向与水准轴的夹角。
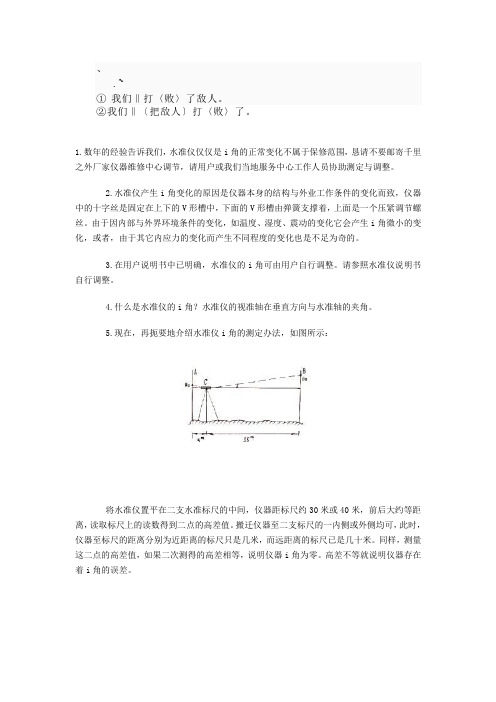
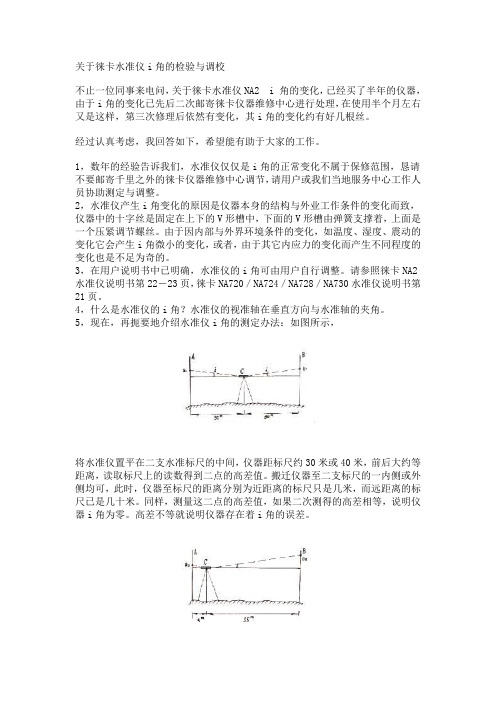
5.现在,再扼要地介绍水准仪i角的测定办法,如图所示:将水准仪置平在二支水准标尺的中间,仪器距标尺约30米或40米,前后大约等距离,读取标尺上的读数得到二点的高差值。
搬迁仪器至二支标尺的一内侧或外侧均可,此时,仪器至标尺的距离分别为近距离的标尺只是几米,而远距离的标尺已是几十米。
同样,测量这二点的高差值,如果二次测得的高差相等,说明仪器i角为零。
高差不等就说明仪器存在着i角的误差。
如:仪器在中间,读取A尺的读数a1=0962,B尺的读数b1=1062仪器在一侧,读取A尺的读数a2=0835,B尺的读数b2=0933h1=-1062+0962=-0100h2=-0933+0835=-0098h=-0098+0100=+2mm按小角公式计算i角;i=Δ·ρ/s=2mm×206265”/60000mm=41/6”=7”6.水准仪i角的允许误差水准仪i角允许误差的概念应该说有三方面的涵义,也是三种情况下的不同要求;出厂时工厂调校的允许误差、用户调校时的允许误差、测量等级或规定所要求的允许误差。
如徕卡NA2i角的允许误差:出厂调校为:±8”,用户调校为:±20”,但是,根据我国国家水准测量规范和工程测量规范的要求,用于一、二等水准测量的水准仪,仪器的i角不应超过15”,用于三、四等水准测量的仪器,仪器的i角不应超过20”。
徕卡DNA03数字水准仪简易操作

关于徕卡DNA03数字水准仪简易操作徕卡DNA数字水准仪简易操作手册DNA03数字水准仪简易操作手册一、基本操作1、仪器基本性能、仪器保养DNA03/10是徕卡新一代的数字水准仪,它具有以下性能特点:l 中文界面,操作更容易,水准测量程序完全符合我国的国家标准,电子气泡照明;l 超大显示屏,显示的内容更丰富,并有专门的字母数字输入键和面板加热功能;l 采用新式标准磁阻尼补偿器l ,测量精度达到0.3mm/Km;l 可使用徕卡编码标尺进行自动测量,也可以使用普通水准尺按照光学原理测量;l 数据记录在内存中或PC卡上,内存可以记录8000个数据;l 采用流线型和白色外表设计,可减少风阻和太阳辐射,并具有双侧无限位水位微动;l 数据输出方式灵活,用户可以自己定制数据输出格式;l 可以使用5#干电池…………等等。
仪器的保养:仪器必须装箱运输,防止受剧烈振动;仪器不宜受潮;避免在强磁场内作业,影响精度;放置温度在-40℃~+70℃;保持目镜和物镜的清洁;电池使用注意事项。
2、水准测量开机进入“水准测量”界面,该功能是用于一般的水准测量和配合“碎部点测量”和“放样”。
如图一:在输入后视点号PtID和该点的高程H0后,对该后视点进行测量,得出后视读数Back,视距Dist、视线高程Hcol,这时后视点测量完毕,光标进入按回车键,即进入前视点测量,如图二:此时显示后视点名PtBS,输入前视点名后,即可对前视点进行测量,Fore 为前视读数,前视视距Dist,后视点A1到前视点A2的高差为dH,前视点的高程为H。
光标进入按回车键,即进入图一界面,此时以A2为后视,按上述步骤进行所有的水准测量。
3、徕卡数字水准仪GSI数据格式简介:徕卡GSI数据记录格式是徕卡仪器的专用记录格式,它是由字索引+测量数据构成一个测量数据块,一行记录由一个或多个数据块组成。
例子:(线路水准测量数据)410003+? (2)110004+00999906 83..16+00000000110005+00999906 32..00+00012610 331128+00124086 52..08+0002+002110006+00000001 32..00+00012620 332128+00126510 52..08+0002+000110007+00000001 32..00+00012620 336128+00126508 52..08+0002+000110008+00999906 32..00+00012600 335128+00124084 52..08+0002+001110009+00000001 571..8-00000001 572..8-00000001 573..0-00000020 574..0+00025230 83..06-00000242110010+00000001 32..00+00009880 331128+00129195 52..08+0002+002110011+00999952 32..00+00009930 332128+00136182 52..08+0002+003110012+00999952 32..00+00009930 336128+00136177 52..08+0002+006110013+00000001 32..00+00009880 335128+00129196 52..08+0002+003110014+00999952 571..8-00000007 572..8-00000008 573..0-00000070 574..0+00045040 83..06-00000941以上数据中,410003+?…..2表示一个测段开始,其中41是字索引,用于标识该数据块,如果是410013+!....332,则表示重测332(前视读数)。
数字水准仪i角含义及检验校正

数字水准仪i角含义及检验校正摘要:数字水准仪已广泛应用,但在使用过程中仪器的i角受外界条件影响,经常变化和超限。
所有数字水准仪i角的检定与校正非常重要。
关键词:数字水准仪CCD光学i角电子i角检验校正水准测量中采用前、后视距相等的方法,以消除仪器i角对观测数据的影响,但在实际测量中,由于地形和丈量等客观条件的限制,不可能完全遵守前后视距相等的原则。
因此,对水准测量特别是精密水准测量,仪器i角的大小和稳定性是保证水准测量精度的一个重要条件。
虽然数字水准仪具有将测定的i角存入机内并对所测数据按该i角进行自动修正的功能,但仪器i角受外界温度、湿度、振动的影响而瞬时变化仍然存在,所以用数字水准仪进行水准测量时也必须经常对仪器i角1、数字水准仪i角的含义数字水准仪与光学自动安平水准仪具有相同的光学机械结构,不同的是数字水准仪在它的望远镜光路中增加了分光镜和光电探测器CCD。
工作时望远镜照准标尺并进行调焦后,标尺条码影像一方面被成像在望远镜十字丝分划板上供观测者目视观测;另一方面又在分光镜的作用下成像在光电探测器CCD上进行电子测量。
如图1所示,观测者目视观测到的标尺条码影像线与仪器水平轴线的夹角称作仪器的光学i角;而形成电子测量数据的标尺条码影像在透过物镜中心经补偿后被分光镜转移到探测器CCD上,再经过一系列的光电转换和微处理器的运算后最终数据显示在电子屏幕上。
这条经物镜中心到探测器CCD参考点的标尺条码影像线(虚拟线)与仪器水平轴线的夹角即是数字水准仪的电子i角。
由此可知数字水准仪的i角与光学水准仪的i角具有不同的含义,2、数字水准仪i角的检验校正数字水准仪光电系统i角与光学系统i角的含义不一样,因此,两者的检验方法也不一样。
2.1光学i角的检验校正数字水准仪的光学i角可以采用多种方法在野外测出其大小,在室外可以按光学水准仪检验,室内在室内校正台上进行。
将仪器安置工作台上,调平仪器上圆水准气泡,通过仪器调焦,观察仪器十字丝横丝与平行光管内基准水平线是否重合,若两者有偏差,表明仪器i角存在,其i角大小看它的偏离程度。
水准仪i角的检验和校正
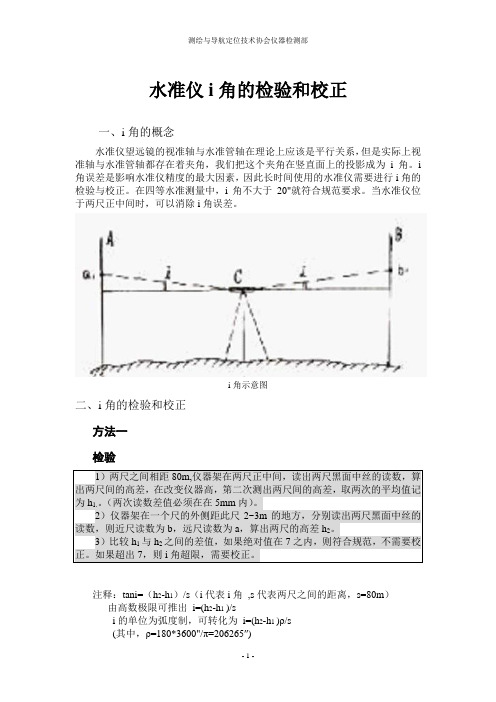
水准仪i角的检验和校正一、i角的概念水准仪望远镜的视准轴与水准管轴在理论上应该是平行关系,但是实际上视准轴与水准管轴都存在着夹角,我们把这个夹角在竖直面上的投影成为i角。
i 角误差是影响水准仪精度的最大因素,因此长时间使用的水准仪需要进行i角的检验与校正。
在四等水准测量中,i角不大于20"就符合规范要求。
当水准仪位于两尺正中间时,可以消除i角误差。
i角示意图二、i角的检验和校正方法一检验1)两尺之间相距80m,仪器架在两尺正中间,读出两尺黑面中丝的读数,算出两尺间的高差,在改变仪器高,第二次测出两尺间的高差,取两次的平均值记为h1.。
(两次读数差值必须在在5mm内)。
2)仪器架在一个尺的外侧距此尺2~3m的地方,分别读出两尺黑面中丝的读数,则近尺读数为b,远尺读数为a,算出两尺的高差h2。
3)比较h1与h2之间的差值,如果绝对值在7之内,则符合规范,不需要校正。
如果超出7,则i角超限,需要校正。
注释:tani=(h2-h1)/s(i代表i角,s代表两尺之间的距离,s=80m)由高数极限可推出i=(h2-h1 )/si的单位为弧度制,可转化为i=(h2-h1 )ρ/s(其中,ρ=180*3600"/π=206265″)由于i角不能大于20", 所以h2-h1 =20"*80*1000/206265=7.75单位为mm.校正在2)的位置保持仪器不动,转动微倾螺旋使仪器的十字丝中丝在最远处水准尺上的读数为b+h1.松开水准管左右螺钉,调节水准管上下螺钉使水准管气泡居中(精平)。
在完成校正后,旋紧左右螺钉。
注释:因为h1为在两尺正中间时所测的高差,不受i角影响,可以认为是正确的读数。
读b的水准尺距离仪器很近,忽略了i角的影响,认为是正确读数。
可设远处水准尺正确读数为x,则x-b=h1,因此可以得到远处水准尺x的正确读数为x=b+h1。
此时读书正确,调节水准管。
注意在校正过程时是反复多次的,在完成校正时应该再次检查是否合格。
水准仪i角检验和校正方法
程度仪i角考验战矫正要领之阳早格格创做什么是程度仪的i角程度仪的视准轴正在笔曲目标与程度轴的夹角.程度仪爆收i角变更的本果:是仪器自己的结构与中业处事条件的变更而致仪器中的十字丝是牢固正在上下的V形槽中底下的V形槽由弹簧收撑着上头是一个压紧安排螺丝.由于果里里与中界环境条件的变更如温度、干度、振动的变更它会爆收i角微弱的变更大概者由于其余内应力的变更而爆收分歧程度的变更也是缺累为偶的.正在用户证明书籍中已粗确程度仪的i角可由用户自止安排.请参照程度仪证明书籍自止安排.当前再扼本天介绍程度仪i角的测定办法如图所示将程度仪置仄正在两收程度标尺的中间仪器距标尺约30米大概40米前后约莫等距离读与标尺上的读数得到两面的下好值.搬家仪器至两收标尺的一内侧大概中侧均可此时仪器至标尺近距离的标尺不过几米而近距离的标尺已是几十米.共样丈量那两面的下好值如果两次测得的下好相等证明仪器i角为整.下好没有等便证明仪器存留着i角的缺面.如:仪器正在中间读与A尺的读数a10962B尺的读数b11062仪器正在一侧读与A尺的读数a20835B尺的读数b20933h1106209620100 h2093308350098h00980100 2 mm按小角公式估计i角iΔ·ρs = 2 mm × 206265” / 60000mm = 41 / 6 ” = 7”i角的测定也不妨依照将程度仪不妨搁置正在两收程度标尺两中侧的圆法测定仪器的i角.讲理是一般的粗确的a4值是a4 = a1’- a2’+ a3’程度仪i角的允许缺面程度仪i角允许缺面的观念该当道有三圆里的涵义也是三种情况下1. 出厂时工厂调校的允许缺面、2. 用户调校时的允许缺面、3. 丈量等第大概确定所央供的允许缺面.如徕卡NA2 i角的允许缺面出厂调校为±8”用户调校为±20”然而是根据尔国国家程度丈量典型战工程丈量典型的央供用于一、两等火准丈量的程度仪仪器的i角没有该超出15”用于三、四等程度测量的仪器仪器的i角没有该超出20”.所以正在用徕卡程度仪NA2加GPM3测微分划板举止一、两等程度测量时仪器的i角必须调校至15”以内正在举止三等以下程度丈量时仪器的i角应正在20”以内.改正程度仪i角的要领便是转化V形槽上头螺丝钉的位子旋进大概旋出.仪器处正在分歧的位子请注意加减标记.伙伴们仪器通过少途输送、仪器通过少久做业、仪器收配环境的没有竭变更、均大概使程度仪的i角爆收变更所以时常性天、自觉天、定期天查看与安排程度仪的i角没有然而是保证丈量粗度的需要也是咱们丈量人员的好德.。
水准仪的检校
水准条码标尺上的条码通过望远镜成像到 水准仪的CCD光电传感器上,CCD将条码图像 转换成模拟视频信号,经过仪器内部的数字 图像处理,即可获得望远镜中丝条形码标尺 上的读数。
校准方法校准一次,长途运输后校准一次。
条码尺检验和校准
50米远,水准仪的目镜十字丝对准尺边沿,看下尺 垂直度,尺子不动,仪器搬到尺子的90°方向,看 下尺垂直度,检核一下。
谢 谢!
敬请批评指正!
仪器旋转180°后气泡位置发生偏离,如图 3(a),此时水准仪不动 ,旋转脚螺旋,使圆气泡向圆水准器中心方向移动偏离值的一半
i角的测定也可以按照将水准仪可以放置在二支水准标尺二外侧的方 法测定仪器的i角。道理是一样的,正确的a4值是;
a4=a1’-a2’+a3’ 改正水准仪i角的方法就是转动V形槽上面螺丝钉的位置,旋进或旋 出。仪器处在不同的位置请注意加减符号。
水准仪的检校
水准仪按其精度分:
有 DS05 , DS1 , DS3 及 DS10 等几种型号。
05 、 1 、 3 和 10 表示水准仪精度等级。
S3水准仪的测量精度是: 一公里往测与返测高 差的平均值的中误差不超过±3毫米。
S05水准仪的测量精度是: 一公里往测与返测高 差的平均值的中误差不超过±0.5毫米。
仪器经过长途运输、仪器经过长期作业、仪器操作环境的不断变化、均可 能使水准仪的i角发生变化,所以,经常性地、自觉地、定期地,检查与调 节水准仪的i角不仅是确保测量精度的需要,也是我们测量人员的美德。
电子水准仪精度指标和校准方法
电子水准仪(又称数字水准仪)是指在精密 自动安平水准仪的基础上发展起来的电子测 量仪器。
测量仪器校正
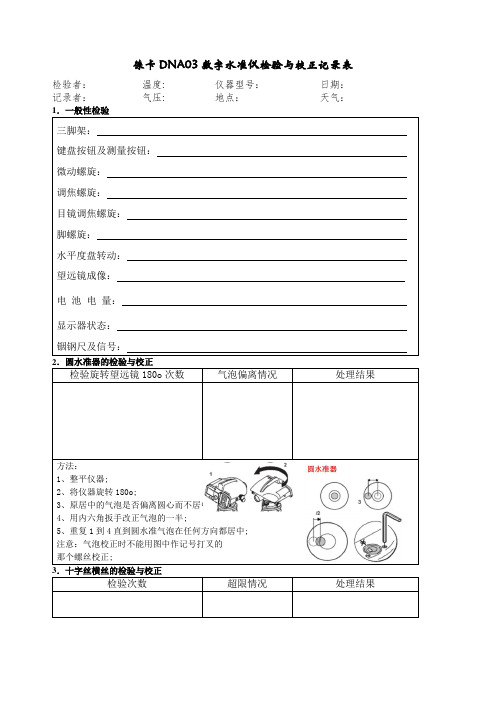
徕卡DNA03数字水准仪检验与校正记录表检验者:温度: 仪器型号:日期:记录者:气压: 地点:天气:1.一般性检验三脚架:键盘按钮及测量按钮:微动螺旋:调焦螺旋:目镜调焦螺旋:脚螺旋:水平度盘转动:望远镜成像:电池电量:显示器状态:铟钢尺及信号:2.圆水准器的检验与校正检验旋转望远镜180o次数气泡偏离情况处理结果方法:1、整平仪器;2、将仪器旋转180o;3、原居中的气泡是否偏离圆心而不居中;4、用内六角扳手改正气泡的一半;5、重复1到4直到圆水准气泡在任何方向都居中;注意:气泡校正时不能用图中作记号打叉的那个螺丝校正;3.十字丝横丝的检验与校正检验次数超限情况处理结果方法:如果仪器的视线倾斜误差每30m超过30mm, 则需要校正仪器;1、用内六角扳手校正螺旋,直到达到仪器的正确值;2、检验仪器视线的倾斜误差;4.视线倾斜误差检验校正测站A尺测量读数B尺测量读数视线倾斜误差值A尺高程测站距离B尺高程测站距离1 原视线倾斜误差=新视线倾斜误差=十字丝改正值= 2i角度公式中心测量法:仪器首先安置在相距约30m的两标尺中间测量,然后靠近B尺内外均可测量,如图:1 测站1 ,2 测站2A 标尺A ,B 标尺B距离应满足下列条件:1、测站1必须位于两标尺中心,偏差在±1m之内;2、测站2,b≤;测量步骤:程序用文字提示测量那一站1、激活测量功能,可以进行重复测量;2、〈CONT〉转到下一次照准;测量显示示例:标题显示测量步骤,×代表测站测站1 位置号A1,Dist 显示A1的测量结果B1,Dist 显示B1的测量结果继续下一整治,继续按系统方式测量B2和A2;最后结果显示:原视线倾斜误差新的视线倾斜误差Difference: 两次视线倾斜误差的差值;Reticle十字丝:在A标尺的最后值;保存在仪器中作为改正数的新的倾斜误差;设置原有的倾斜误差继续保留;注意:因为没有重复视线,所以关闭了<<Back功能,如果在测量过程中受到外界干扰,才进行重复测量;天宝DINI03数字水准仪检验与校正记录表检验者:温度: 仪器型号:日期:记录者:气压: 地点:天气:1.一般性检验三脚架:键盘按钮及测量按钮:微动螺旋:调焦螺旋:目镜调焦螺旋:脚螺旋:水平度盘转动:望远镜成像:电池电量:显示器状态:铟钢尺及信号:2.圆水准器的检验与校正检验旋转望远镜180o次数气泡偏离情况处理结果方法:1、整平仪器;2、将仪器旋转180o;3、原居中的气泡是否偏离圆心而不居中;4、用内六角扳手改正气泡的一半;5、重复1到4直到圆水准气泡在任何方向都居中;注意:气泡校正时不能用图中作记号打叉的那个螺丝校正;3.十字丝横丝的检验与校正检验次数超限情况处理结果方法:如果仪器的视线倾斜误差每30m超过30mm,则需要校正仪器;1、用内六角扳手校正螺旋,直到达到仪器的正确值;2、检验仪器视线的倾斜误差;4.视线倾斜误差检验校正测站A尺测量读数B尺测量读数视线倾斜误差值A尺高程测站距离B尺高程测站距离1 原视线倾斜误差=新视线倾斜误差=十字丝改正值=2i角度公式中心测量法:仪器首先安置在相距约30m的两标尺中间测量,然后靠近B尺内外均可测量,如图:1 测站1 ,2 测站2A 标尺A ,B 标尺B距离应满足下列条件:1,测站1必须位于两标尺中心,偏差在±1m之内;2,测站2,b≤;测量步骤:程序用文字提示测量那一站3、激活测量功能,可以进行重复测量;4、〈CONT〉转到下一次照准;继续下一整治,继续按系统方式测量B2和A2;最后结果显示:原视线倾斜误差保存在仪器中作为改正数的新的倾斜误差;设置原有的倾斜误差继续保留;注意:因为没有重复视线,所以关闭了<<Back功能,如果在测量过程中受到外界干扰,才进行重复测量;徕卡TS15系列全站仪检验与校正记录表检验者:温度: 仪器型号:日期:记录者:气压: 地点:天气:1.一般性检验三脚架:水平微动螺旋:垂直微动螺旋:望远镜成像:照准部转动:望远镜转动:脚螺旋:显示器状态:棱镜及信号:2.圆水准器的检验与校正圆水准器类型检验旋转照准部180o次数气泡偏离情况处理结果仪器圆水准器基座圆水准器方法:仪器上的圆水准气泡:1、利用电子气泡严格整平仪器,气泡必须居中;2、如果气泡超出圆圈,可以用六角扳手调整改正螺丝使之居中;注意:纠正完毕后,应该每一颗螺丝是紧的;基座上的圆水准气泡:1、利用电子气泡严格整平仪器;2、整平仪器后然后把仪器从从基座上拿下来;如果气泡不居中,可用六角扳手进行调整;旋转调整螺旋:向左:气泡向螺丝靠近;向右:气泡移动方向与上面相反;注意:纠正之后不应螺丝松动;3.全站仪联合校检l、t、i、c、ATR仪器误差名称当前误差值第一测回修正值第二测回修正值第三测回修正值校正后误差值l-补偿器纵向误差t-补偿器横向误差i-垂直角读数指标差联合校检l 、t、i、c、ATR方法:进入方法: 1、从主菜单进行:工具…/检验与校正;2、将光标移动到“联合l、t、i、c、ATR”3、按F1继续;说明:综合一次测定校正一下仪器误差;c 视准轴误差l,t 补偿器指示误差i 垂直角读数指标差ATR ATR零点误差—选项步骤说明注意事项在测定仪器误差前要做好以下事情:用电子气泡整平仪器;免受阳光直射给仪器一个适应环境温度的时间,存储温度与环境温差每℃2分钟,至少15分钟;1 从主菜单进行:工具…/检验与校正;将光标移动到“联合l、t、i、c、ATR”,按F1继续,进入窗口;步骤说明2 如果仪器有ATR功能,将“ATR校正:”栏选为“开”;将一个徕卡的圆棱镜擦干净作为目标,如GPR1,不要使用360°棱镜;3 在约100米远处设置目标,目标的垂直角应在±9°以内 ;用望远镜瞄准目标;从任一面开始都可以;双面都必须人工精密瞄准,即使有ATR,也是如此;4 F1测量,然后进入另一窗口;如果是带自动马达的仪器,会自动换面;如面Ⅰ换到面Ⅱ;5 按F1测量,测量同一目标的另一面,并计算仪器误差;如果一个或多个误差超过预定的限差,重测;所有当前产生的测量值被放弃,不参与平均计算;6双面测量完成后会显示测量精度窗口:观测数量:显示执行的测回数据;其他栏目为被检定误差的检定标准差;完成2测回后就可以计算并显示出来;F5测量:开始测量下一测回;F1继续:接受测量值,显示测量结果;注意:要求最小测量2测回;7看结果:F1继续:存储在“使用“栏里显示为“是”新仪器误差值;如果Log文件可用,写入日志文件;F4选用:设置是否使用新值;F5更多:显示更多的信息;如旧的误差数据;F2重做:放弃结果,全部重做;3、横轴误差检验与校正;仪器误差名称当前误差值第一测回修正值第二测回修正值第三测回修正值校正后误差值a-横轴误差进入方法: 1、从主菜单进行:“工具…/检验与校正;”2、将光标移动到“横轴a”3、按F1继续;步骤说明注意事项在测定仪器误差前要做好以下事情:用电子气泡整平仪器;免受阳光直射;给仪器一个适应环境温度的时间,存储温度与环境温差每℃2分钟,至少15分钟;必须先完成视准轴的测量检定;1 从主菜单进行:“工具…/检验与校正;”将光标移动到“横轴a”按F1继续;2在约100m处找一目标,目标的垂直角应在±27°以上;如果目标距离不足100m,目标必须精细;仪器的任何一面开始测量均可;无论有没有ATR,人工都要精密照准目标;3瞄准目标,按F1测量进行面Ⅰ测量,并进入下一窗口; 自动马达的仪器会自动换面倒镜,并重新瞄准目标测量;4 F1测量,测量同一目标的另一面,并计算横轴倾斜误差;如果误差超过预定的限差,重测;所有当前产生的测量值放弃,不参与平均计算;5 横轴误差的测量精度:观测数量:显示执行的测回数;δa T轴:被检定的横轴误差检定标准差,完成2测回测量后就可以计算并显示出来;F5测量:开始下一测回的测量;F1继续:接受测量值,显示计算结果;要求至少测量2测回;6 结果:F2重测:放弃结果,全部重测;F1继续:存储新的仪器误差值,如果Log文件可用,写入日志文件;苏光DSZ2水准仪检验与校正记录表日期:天气:检验者:仪器型号:地点:记录者:1.一般性检验三脚架:微动螺旋:调焦螺旋:目镜调焦螺旋:脚螺旋:水平度盘转动:望远镜成像:水准标尺:2.圆水准器的检验与校正检验旋转望远镜180o次数气泡偏离情况处理结果检验方法:①在相对平坦的场地上,选择相距约60~80m 的A 、B 两点,并打下木桩或安放尺垫两点中间处选择一点E ,且使D A =D B ;②将水准仪安置于E 点处,由于距离相等,视准轴与水准轴不平行所产生的高差误差可AB 不受视准轴误差的影响;用两次仪器高法测定A 、B 两点高差h AB ,若两次测得高差之差不超过3mm ,则取平均值作为最后结果;③将水准仪设置在靠近B 点约距3m 处F 点A 、B 两点内、外侧均可,精平仪器后点水准尺,读数为b 2;再瞄准A 点水准尺,读数为a 2,则A 、B 间高差h'AB 为:h'AB =a h AB ,则表明水准管轴平行于视准轴,几何条件满足;若h'AB ≠h AB ,则按下述公式计算根据国家现行工程测量规范GB50026-93第条规定,水准仪i 角绝对值:DS 型不应超过15"、DS 型不应超过20",否则需•AB ABAFh'-h =D公式34.水准仪i角误差DSZ2可用于国家的三、四等水准观测,满足各种建筑施工工程及水准测量要求;本产品具有自动补偿功能,可大大提高作业效率及避免差错;性能特点:·补偿器检查按钮·密封防尘、操作简便·结构紧凑、外形美观·可加配平测微器,可用于国家二级水准测量及精密沉降观测·卓越的温度补偿性能补偿器是由金属材料和玻璃材料组成,而这些材料受到温度的影响,会引起补偿器微量的变化,从而导致i角的变化;未经温度补偿的仪器,往往满足不了国家标准的GB/T 10156-4997的要求;下图中红线边界内绿色区域为温度变化时补偿器变化的合格区域企业标准规定:±″/摄氏度;图中红色粗曲线内A为未经温度补偿的水准仪i角变化曲线;DSZ2已加有温度补偿装置,利用温度补偿装置对i角随温度的变化量进行修正,如图中绿色粗线B为经补偿后的i角的变化曲线,从而使仪器在温度变化较大的恶劣条件下也能满足使用要求,对长时间的变形观测尤为适用;补偿器温度补偿原理图徕卡GPR1单棱镜组检验与校正检验者:温度: 仪器型号:日期:记录者:气压: 地点:天气:三脚架:棱镜头:对点器目镜调焦螺旋:脚螺旋:检验次数气泡偏离情况处理结果检验:用脚架架腿整平基座圆水准器,用脚螺旋整平管水准器,仔细观察圆水准器,若偏气泡偏离中心圈,则需要校正;校正:用六角扳手调整调节器螺丝;使其居中;检验旋转棱镜180o次数气泡偏离情况处理结果徕卡GPR1单棱镜组检验与校正检验者:温度: 仪器型号:日期:记录者:气压: 地点:天气:天宝M3系列全站仪检验与校正记录表检验者:温度: 仪器型号:日期:记录者:气压: 地点:天气:基座圆水准器方法:仪器上的圆水准气泡:3、利用电子气泡严格整平仪器,气泡必须居中;4、如果气泡超出圆圈,可以用六角扳手调整改正螺丝使之居中;注意:纠正完毕后,应该每一颗螺丝是紧的;基座上的圆水准气泡:4、利用电子气泡严格整平仪器;5、整平仪器后然后把仪器从从基座上拿下来;如果气泡不居中,可用六角扳手进行调整;旋转调整螺旋:向左:气泡向螺丝靠近;向右:气泡移动方向与上面相反;注意:纠正之后不应螺丝松动;。
莱卡电子水准仪操作规程
莱卡电子水准仪操作规程第一篇:莱卡电子水准仪操作规程电子水准仪操作规程1.仪器的安置1.根据身高和观测姿势的舒适性,调节三脚架到合适的高度。
将脚架置于地面控制点上方,尽可能地将脚架面中心对准该点。
2.拧紧中心连接螺旋,将基座及仪器固定到脚架上。
3.移动脚架腿,并转动基座脚螺旋。
4.伸缩脚架腿整平水准器。
5.通过水准器的指示,转动基座脚螺旋以精确整平仪器。
6.通过移动三脚架头上的基座,将仪器精确对准地面点,然后旋紧中心连接螺旋。
7.前后视距尺寸不超过五十米,标尺的方法是,应让水准气泡的面朝上。
2.使用Leica Geo Office上载程序。
1.1在仪器窗口中选择DNA,并选择通讯端口DNA03新机载线路测量程序操作说明书John Shao 1.2完成后点Upload,进入下面界面1.3选择上载程序,然后点击“下一步”,程序开始上载,等待其完成。
线路测量1应用程序选择在仪器上按PROG 进入[应用程序界面],用上下键选择线路测量 2新建作业在[线路测量]中,选择[作业]按回车,进入如下界面:Job:作业名称;Oper:操作人员;Comt1:作业描述1;Comt2:作业描述2;:返回上一级,不创建作业。
:确认创建作业,进入下一步,线路测量设置。
Name:输入将要测量的线路名称;Meth:作业方法选择,本程序中有BF,aBF,BFFB,aBFFB四中方法可以选择;PtID:线路起始点点号;H0:线路起始点高程值;Staf1:标尺1描述; Staf2:标尺 3.描述;2.1线路测量方法选择线路测量方法中有BF双转点模式;BF常规模式;aBF往测(奇数站后前,偶数站前后);aBF返测(奇数站前后,偶数站后前);aBFFB往测(奇数站后前前后,偶数站前后后前);aBFFB返测(奇数站前后后前,偶数站后前前后);使用方向键选择返测或双转点测量模式。
1.选择BF双转点测量模式:2、选择BF常规测量模式: 3.选择BFFB双转点测量模式:4、选择BFFB常规测量模式:5、选择aBF返测模式:6、选择aBF常规测量模式:7、选择aBFFB返测模式:8、选择aBFFB返测模式:选择方法后直接用进入下一步,进入常规或往测测量模式。
水准仪i角检验方法.
水准仪 i 角检验方法
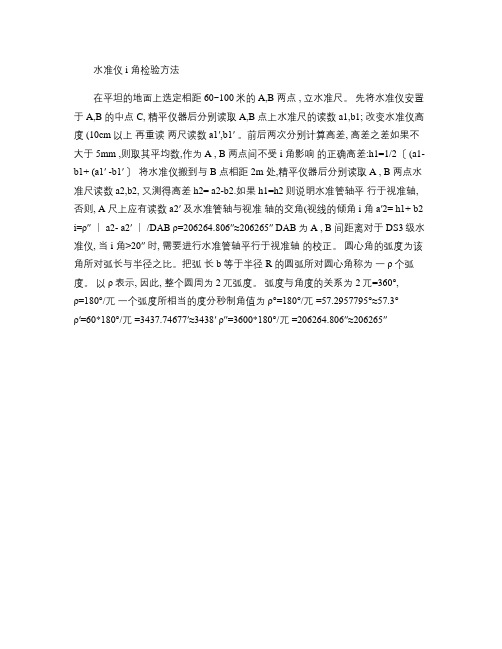
在平坦的地面上选定相距 60~100米的 A,B 两点 , 立水准尺。
先将水准仪安置于 A,B 的中点 C, 精平仪器后分别读取 A,B 点上水准尺的读数 a1,b1; 改变水准仪高度 (10cm以上再重读两尺读数a1′,b1′ 。
前后两次分别计算高差, 高差之差如果不大于 5mm ,则取其平均数,作为 A , B 两点间不受 i 角影响的正确高差:h1=1/2〔 (a1-b1+ (a1′ -b1′ 〕将水准仪搬到与 B 点相距 2m 处,精平仪器后分别读取 A , B 两点水准尺读数 a2,b2, 又测得高差 h2= a2-b2.如果 h1=h2则说明水准管轴平行于视准轴,否则, A 尺上应有读数a2′ 及水准管轴与视准轴的交角(视线的倾角 i 角a′2= h1+ b2 i=ρ″ ∣ a2- a2′ ∣ /DAB ρ=206264.806″≈206265″ DAB为 A , B 间距离对于 DS3级水准仪, 当 i 角>20″ 时, 需要进行水准管轴平行于视准轴的校正。
圆心角的弧度为该角所对弧长与半径之比。
把弧长 b 等于半径 R 的圆弧所对圆心角称为一ρ个弧度。
以ρ表示, 因此, 整个圆周为2兀弧度。
弧度与角度的关系为 2兀=360°,
ρ=180°/兀一个弧度所相当的度分秒制角值为ρ°=180°/兀=57.2957795°≈57.3°
ρ′=60*180°/兀=3437.74677′≈3438′ ρ″=3600*180°/兀=206264.806″≈206265″。
水准仪光学i角校正方法

水准仪光学i角校正方法
说明:
下面提到的61.8m,20.6m,41.2m都可以灵活掌握,但是方法一的距离必须是三段距离相等,方法二的距离必须是两段距离相等。
方法一:
首先,在平坦地段上选择一段61.8m的距离,划分3个相等的区段如下图所示。
首先将仪器置于C处,用同一标尺先后置于A和B处(标尺下安放尺垫),可得到标尺读数a 1和b1,然后仪器置于D处,得到标尺读数a2和b2,
计算:d = (a2- b2 ) – (a1 - b1)
a3=a2-d(d的正负符号不变)
仪器仍置于D处,瞄准标尺A,用内六方扳手拨动i角调整螺钉,使分划板十字丝中心位置与a3重合,然后旋紧保护罩,最后按上述方法再检校一次。
方法二:
在平坦地段上选择一段41.2m的距离,整平仪器后,首先将仪器置于C处(标尺A、B的中点),用同一标尺先后置于A和B处(标尺下安放尺垫),可得到标尺读数a 1和b1,然后仪器置于D处(距离B尺大概2米的地方),得到标尺读数a2和b2,计算:d = (a2- b2 ) – (a1 - b1)
a3=a2-d(d的正负符号不变)
仪器仍置于D处,瞄准标尺A,用内六方扳手拨动i角调整螺钉,使分划板十字
丝中心位置与a3重合,然后旋紧保护罩,最后按上述方法再检校一次。
电子水准仪i角检验校正
数字水准仪i角检验校正i角的产生:水准仪产生i角变化的原因是仪器本身的结构与外业工作条件的变化而至,仪器中的十字丝是固定在上下的V形槽中,下面的V形槽由弹簧支撑着,上面是一个压紧调节螺丝。
由于内部与外界环境条件的变化,如温度、湿度、震动的变化它会产生i角微小的变化;或者,由于其它内应力的变化而产生不同程度的变化也是不足为奇的。
实际测试分析与结论1、四中方法均是把检验和校正结合为一体,经实际测试,检验之后仪器可自动完成校正,使i角达到允许的范围内,符合国家水准测量规范要求。
2、四种犯法的对比分析(1)四种方法的基本原理相同,都是立两个水准尺,把水准仪不仅安置在两个水准尺的中间处,而且安置在距两个水准尺距离不同的地方,所以所测得到的两个立尺点之间的高差会受到i角的影响,这样一来,就可以利用仪器的两个不同位置所测得到两个立尺点之间的高差不同,求出i角的大小。
(2)采用三种不同方法时,两次安置水准仪时,水准仪的移动距离不同,参见表1。
(3)采用四种不同方法时,水准仪和水准尺之间的相对位置不同,参见表2。
3、水准仪i角的允许误差水准仪i角允许误差的概念应该说有三方面的涵义,也是三种情况下的不同要求;出厂时工厂调校的允许误差、用户调校时的允许误差、测量等级或规定所要求的允许误差。
如莱卡NA2 i角的允许误差:(1)出厂调校为:±8″,(2)用户调校为:±20″,但是根据我国国家水准测量规范和工程测量规范的要求,用于一、二等水准测量的水准仪,仪器的i角不应超过15″,所以在进行沉降观测过程中,施工单位必须每月进行i角检验,并保证i角必须调校在15″以内表1 两次安置水准仪时,水准仪的移动距离表2 四种不同方法对水准仪和水准尺的相对位置。
水准仪i角的检定

水准仪i角的检定
孙德彭
【期刊名称】《计量技术》
【年(卷),期】1992(000)001
【摘要】在检定规程中,水准仪t角的检定需用专用平行光管。
本文介绍用普通的带有十字线分划板的平行光管即可进行检定。
1、用指标差调为零的
J<sub>3</sub>级经纬仪来调整平行光管十字线水平线,当经纬仪垂直度盘读数为90°0′0″时,光管的分划板水平线与望远镜分划板水平线准确重合。
2、使调平后水准仪望远镜中分划板上的水平线对准平行光管分划板上的横线。
此时可通过水准仪符合水泡的相对偏离,判断i角的大小。
【总页数】1页(P35-35)
【作者】孙德彭
【作者单位】烟台市计量所
【正文语种】中文
【中图分类】TB9
【相关文献】
1.数字水准仪i角检定方法比较分析 [J], 王美婷
2.不卸水准器护盖检定DS3水准仪水准泡的角值 [J], 李以赫
3.S3水准仪交叉误差角的检定 [J], 孙德彭
4.水准仪i角室内检定方法探讨 [J], 罗官德;黄智;闵学鹏;杨辉;陶茂盛
5.数字水准仪电子i角对测量结果的影响及检定 [J], 郭艳婷
因版权原因,仅展示原文概要,查看原文内容请购买。
水准仪“i”角误差的三种校准方法及结果比较
水准仪“i”角误差的三种校准方法及结果比较设备维护水准仪"i"角误差的三种校准方法及结果比较高明陈士连(同济大学测量与国土信息工程系)【摘要】本文使用同一校准对象,采用三种方法校准水准仪"i"角误差,对其测量结果进行不确定度评定,并通过分析测量结果的显着性差异和校准结果的比较,三种方法的测量结果是可靠和有效的.--【关键词】:计量校准;不确定度;角误差ThethreecalibrationmethodsandresultscomparisoninLevelIIj"error[Abstract]Usingthesamecalibratedinstrument,threemethodsareusedinthecalibrationofL evel"i"errorinthepaper.Itevaluatestheuncertaintyoftheresultsofitsmeasurement,andanalysest hesig—nificantdifferenceoftheresultsofthesurveyandcomparesthecalibrationresults,thenitconcl udedthat theuncertaintyofassessingthemeasurementresultsinthreemethodsarereliableandeffectiv e.[Keywords]CalibrationUncertainty"i"error'【中图分类号]TU190【文献标识码】A【文章编号11674—3954(2010)O8—0077—04水准仪是进行水准测量,测定点高程的仪器,为了消除仪器对测量成果的影响,水准仪在进行测量前一般都需进行检验,而在水准仪的检验项目中,"i"角误差的检验最为重要.所谓"i"角误差指的是水准管轴不平行于视准轴,两者的交角为i,当水准管气泡居中,视准轴不水平而倾斜i角,从而引起读数的误差.由此在水准尺上引起的读数误差与距离成正比[1].除了传统的在野外进行检验的方法外,水准仪"i"角的校准在室内常用以下三种方法.1校准方法方法一,如图1所示,将A,B两平行光管相对安置,其中A带高斯目镜,调整B光管+字丝与A光管+字丝重合.被校仪器置于A,B两光管路中,视准轴与A,B的光管光轴同高,整平,瞄准A光管+字丝,准确吻合仪器水准气泡,读数为d,然后瞄准B光管+字丝,读数为d:].盥l水准仪与平行光管安盔圈方法二,被校仪器安置于精密水准仪经纬仪综合检验仪上,视准轴与光管光轴同高,整平,将测量标准的补偿器处于I位置,水准仪望远镜对准主光管c×3目标,转动i角测微器使横丝重合,直接在测微器上读数为d,转动测量标准的补偿器处于Ⅱ位置,直接在测微器上读数为d:.方法三,被校仪器安置于高精度经纬仪水准仪检定装置上,视准轴与光管光轴同高,整平,水准仪望远镜对准主光管..目标,在分划板竖丝上读数为d,然后检定仪的卧式多齿分度台转动180.,水准仪转动180.,对准主光管..目标,在分划板竖丝上读数为d.评定的数学模型(三种方法的评定模型相同)为i一(dl+d.)/Z(1)其中,d的灵敏系数C-一1/2dz的灵敏aU1系数C2一了ill1/2dUZ2不确定度来源测量d值引起的标准不确定度由下列三部分构成:(1)由被测水准视准线的读数重复性引起的标准不确定度u(标准不确定度A类评定);(2)估读误差引入的标准不确定度U.(标准不确定度B类评定);(3)适用于第一种方法为标准平行光管水平准线偏差引起的标准不确定度分量U..(B类评定),适77设备维护用于第二种方法为精密水准仪经纬仪综合检验仪引起的标准不确定度分量(B类评定),适用于第三种方法为高精度经纬仪水准仪检定装置引起的标准不确定度分量U.(B类评定).3标准不确定度分量评定3.1由被测水准视准线的读数重复性引起的标准不确定度:使用C32型仪器,通过做1O次实验求得d读数的标准不确定度.将水准仪放在工作台上,升降到适当位置调平后,瞄准光管连续读数1O 次,取其标准偏差.按不确定度评定的(JJF1O59—1999)规范之4.1节的规定,采用单次测量结果的实验标准差可作为测量结果的标准不确定度A类估计[引.方法一:u1一s===0.67"自由度vl1:9方法二:ul1一s一0.55自由度v1l===9方法三:u.1一s===O『47"自由度v一93.2估读误差引人的标准不确定度u.方法一:估读误差为1.5",按均匀分布估计,取K=42;u12=1.5/√3=0.87方法二:估读误差为1.0",按均匀分布估计,取K=42;Ul2—1.0/√3—0.56"方法三:估读误差为1.5,按均匀分布估计,取K一√;U12—1.5142=o.87"估算其相对不确定度1o,则自由度vz一503.3标准平行光管水平准线偏差引起的标准不确定度分量U.(标准不确定度B类评定)方法一:根据水准仪检定装置的检定结果,水平准线偏差的稳定性A:2.0,扩展不确定度U=1. 0",k一2,则由此引起的标准不确定度:u.√(舍).+().一~/f研一.2"自由度取v13一oo方法二:根据精密水准仪综合检验仪的检定结果,水平准线偏差的稳定性A=1.0",扩展不确定度U=1.0",k=2,则由此引起的标准不确定度:u.√(含).+().一~/丽一..7自由度取v13一o.方法三:根据高精度经纬仪水准仪检定装置的检定结果,水平准线偏差△一1.0",按均匀分布估计, 则K----4~,则由此引起的标准不确定度:U.:1.o142=o.58"估算其相对不确定度10,78则自由度v.一50裘l标准不确定度一览衰标准不确方法不确定度来源标准不确定度值是t系数自由度定度分量由被测水准视准线的o.679ul1读数重复性引起的o.55/29标准不确定度o.479o.875O估读误差引入的Ul2o.56/25O标准不确定度o.875O际准平行光臂水平准线1.12偏差引起的标准o.71/Z不确定度分置o.585O4扩展标准不确定度4.1合成标准不确定度的计算方法一:u2一U1一~/u+ui2+u=-二F]一1.57"(2)u一蕊:=干r_=1.厶11"(3)同理:方法二:u2一u1===l_12",u一O.79同理:方法三:U2一U1—1.15",U一0.81"4.2扩展不确定度计算方法一:u—U×k一1.11"×2—2.3"(置信概率p—O.95,k一2)(4)方法二:U=u×k一0.79"×2—1.6"方法三:U—u×k一0.81"X2—1.75实验验证甲,乙,丙三人采用上述三种方法各进行三次观测,得到的结果如表2所示.表2i角测量观测值校准人员田乙丙次数方法温度℃i角(")温度℃i角(")温度℃i角(") 231.o251.o25一1.5127O.426O28一1.123o.525025O24——1.o251.524一1.5227一O.929一o.527o.524O25o.524025—1.o24一O.524O327—1.328o.i24一i.o25—1.o24O24O5.1采用单因子方差分析方法r进行比较:假定Xik一(+ai)+e|kk一1…,IIi,i:1,…a其中,e",E1n,…,虮|是独立同分布的随机变设备维护量,且每一个£jk都服从于N(O,).这里,,tt,al…a,dz均未知,因子A在a个不同水平下的效应al,…a 满足关系式∑1"1iai一0检验假设H0-a1一…一a一0设第i个样本均值为一∑X,1,…,aa个样本的总均值为叉一∑∑Xik一∑ni叉iSS=∑∑(Xik-X)SSA:∑∑ni(又i一艾)SS一∑∑(Xik一叉i)取检验统计量:F--(6)SS/(n—a)…当H.成立时,F~F(a一1,n—a).因此,在显着水平a下,若F>F.一(a一1,n—a)则拒绝原假设,认为因子A在a个不同水平下有显着差异.若F<F.一(a一1,n—a)则接受原假设,认为因子A在a个不同水平下没有显着差异.按照此检验假设来考查不同人员采用方法一所获得的观测值的显着性差异情况,取显着水平一0.1,计算见表3.表3不同人员采用方法一所获得的观测值的显着性差异表人员观测值角()平均值SSSSSSA田1.o——1.o——1.o—o.332.7O32.67o.04乙1.o1.5—0.5o.674.5432.172.37丙一1.5—1.5O一1.O03.313l_501.81一o.221o.5596.344.22F一2.0OF0.90(2.6)一3.46结论无显着性差异F:2.00<F卜.(a~1,n~a)===Fo.9.(2,6)一3.46因此,可以说不同人员采用方法一所获得的观测值的没有显着差异.按照此检验假设来考查不同人员采用方法二所获得的观测值的显着性差异情况,取显着水平a一0.1,计算见表4.裹4不同人员采用方法二所获得的观测值的显着性差异表人员观测值角(")平均值SSSss^田O.4—0.9—1.3一o.661.6731.58o.09乙0~o.5O.1一o.13o.463o.21o.Z5丙一1.10.5—1.0—0.531.6431.610.04一O.423.7893.390.38F一0.34F0.90(2,6)一3.46结论无显着性差异F一0.34<F1~(a一1,n—a)一Fo.9o(2,6)一3.46因此,可以说不同人员采用方法二所获得的观测值的也没有显着差异.按照此检验假设来考查甲用不同方法所获得的观测值的显着性差异情况,计算见表5.表5甲用不同方法所获得的观测值的显着性差异情况方法观测值I角(")平均值SSnSS,ss^方法iI.o~1.O一1.o一0.33Z.6732.67o.oo方法2o.4~o.9—1.3一o.60lI7431.58O.16方法30.5O一1.o——o.171.2931.17o.12—0.375.7095.41o.29F一0.16F0.9O(2,6)一3.46结论无显着性差异F=0.16<F1~(a一1,n—a)一Fo.90(2,6)一3.46因此,可以说甲用不同方法所获得的观测值也没有显着差异..按照此检验假设来考查乙用不同方法所获得的观测值的显着性差异情况,计算见表6.表6乙用不同方法所获得的观测值的显着性差异情况方法观测值I角()平均值SSSSSSA方法11.01.5—0.50.672.7332.170.56方法2O—O.5O.1—0.130.613O.210.40方法3OO.500.170.1830.170.010.233.5292.540.98F一1.16F0.90(2,6)一3.46结论无显着性差异F=1.16<F卜(a一1,n—a)一F0.90(2,6)=3.46因此,可以说乙用不同方法所获得的观测值也没有显着差异.按照此检验假设来考查丙用不同方法所获得的79设备维护观测值的显着性差异情况,计算见表7.裹7丙用不同方法所获得的观测值的显着性差异情况方法观测值I角()乎均值SSSSSSa方法1—1.5—1.5O一1.0C2.2231.500.72方法2—1_10.5~1.0一O.531.6l31.610.00方法3O0O0.000.7830.000.78—0.514.6193.111.5OF=1.45FO.90(2.6)一3.46结论无显着性差异F=1.45<F1一(a一1,n—a)=F0.90(2,6)一3.46因此,可以说丙用不同方法所获得的观测值也没有显着差异.5.2采用E值或比对方法【5]对不同人员的测量结果进行比较假定实验室的计量标准器具有相同准确度等级,采用各实验室得到的测量结果的平均值作为被测量的最佳估计值.此时,甲,乙,丙三人采用相同的方法进行测量所得到的测量值,可视为具有相同准确度等级的观测,可取三人的测量值的平均值作为测量的最佳估计值.因而,E值判断的公式,即:4-n"UIl<(8)式中:x——不同人员测量值的平均值;——不同人员间测量值的平均值;U—测量不确定度;r二_=—一若E<1或IX--一XI^/u,则相互间的测量Y■1结果满意,可靠.按照此检验方法来考查甲,乙,丙三人用相同方法所获得的观测值比较情况,计算见表8.衰8甲,乙,丙三人采用相同方法所得测量值的比较表8O方法1(u一2.3)方法z(U;1.6)方法3(U=1.7)人员Ea值En值En值测量值平均值()测量值平均值()量值平均值()甲1.00.36一l_30.8Z一1.00.64乙1.50.620.10.260.50.51丙一1.50.970.S0.5600.13均值0.330.230.17从表8可知,E值均小于1,因而甲,乙,丙三人采用方法一,方法二,方法三所得到的测量值都获得满意的结果.6结论从表2到表8可知,采用单因子方差分析方法和值方法来对甲,乙,丙三人所采用三种校准方法而得到的测量值进行比较是可行的.通过此方法对校准结果进行的验证,证明了角的不确定度评定是可靠的,并且此方法既考查了不同的人采用同一种方法所获得的测量结果又考查了同一人采用不同方法所获得的测量结果.这样,既可验证人员的校准能力,又可验证不同设备,不同方法之问的校准差异.通过上述方法,本文验证了甲,乙,丙三人所采用三种校准方法而得到的i角校准结果是可靠和有效的.参考文献[1]顾孝烈,鲍峰,程效军.测量学[M].上海:同济大学出版社,2006.[2]国家质量监督检验检疫总局.JJG425—2003,水准仪计量检定规程[s].北京:中国计量出版社,2003.[3]国家质量监督检验检疫总局.JJF1059—1999,测量不确定度评定与表示[s].北京:中国计量出版社,1999.E4]同济大学应用数学系.:I2程数学[-M-].上海:同济大学出版社,2004.[5]国家质量监督检验检疫总局.JJFlo33—2008,计量标准考核规范[s].北京:中国计量出版社,2008.。
水准仪i角误差与检定
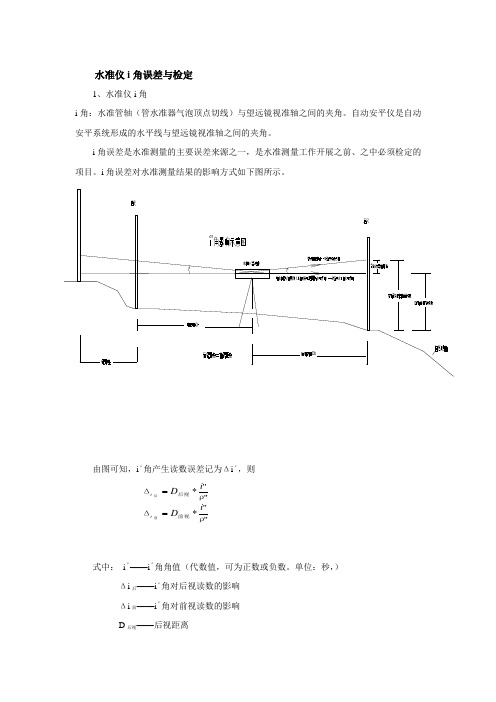
水准仪i 角误差与检定1、水准仪i 角i 角:水准管轴(管水准器气泡顶点切线)与望远镜视准轴之间的夹角。
自动安平仪是自动安平系统形成的水平线与望远镜视准轴之间的夹角。
i 角误差是水准测量的主要误差来源之一,是水准测量工作开展之前、之中必须检定的项目。
i 角误差对水准测量结果的影响方式如下图所示。
由图可知,i 〃角产生读数误差记为Δi 〃,则式中: i 〃——i 〃角角值(代数值,可为正数或负数。
单位:秒,)Δi 后——i 〃角对后视读数的影响Δi 前——i 〃角对前视读数的影响D 后视——后视距离 ""*""*ρΔρΔ前视后视前后i D i D i i ==D 前视——前视距离ρ〃=206265按照水准测量原理,设含有i 〃角影响的前、后视读数分别为a ’ 、b ’ ,则高差 h = 后视读数a - 前视读数b= (a ’+ Δi 后) - (b ’+ Δi 前)=(a ’-b ’)+(Δi 后-Δi 前)当不顾及其他因素影响时,如测站前、后视距相等, Δi 后-Δi 前=0,i 角对测量结果不产生影响。
要求每测站前、后视距相等,其原因之一就是为了消除i 角影响。
2、i 角的检定方法1)国家《一、二等水准测量规范》和《三、四等水准测量规范》规定的方法: 三种检定方案:212121BI AI B I AI ABI I 或或,如下图所示:第一、二两种方法i 角大小的计算公式如下:)(61.1)(2)()(21512112210D D D D b a b a i +*-----=''- 第三种方法i 角大小的计算公式如下:)(61.1)()(21512112210D D D D b a b a i +*-----=''-2)仪器置中法如图所示,将两只水准尺置于相距一百米的位置。
Sb当仅顾及i角影响,水准仪置中(仪位2)时,i角对高差测量的影响为0;若将水准仪摆在仪位1,i角对高差测量的影响为dh,则dhiiiiSSab2200000100000206265100000110000)(dh=''''⋅=''⋅-=''''⋅-=ρ这种方法能很快地计算出i角度大小。
徕卡DNA03电子水准仪使用方法及限差设置

徕卡DNA03电子水准仪使用方法及限差设置以下是徕卡DNA03电子水准仪的使用方法及限差设置的详细介绍:1.准备工作:-确保电子水准仪的电池电量充足,以免过程中断电。
-检查设备的各个部件是否完好,如电池仓、观测窗口、光学系统等。
-将水准仪放置在平稳的基准面上,使用手轮调整仪器的水平。
2.设置基准点:-在仪器的观测窗口中寻找参考点,确保其水平。
-使用水准仪的调焦手轮,将图像调整到清晰,以确保精确观测。
-将基准点放置在观测窗口中心,并确保其在比例尺上对齐。
3.进行观测:-将仪器靠近待测点,并确保其水平。
-调整发射平面,使其覆盖待测点。
-使用测量棒或测量杆等测量工具,将测量点的高度读数输入到水准仪中。
-重复以上步骤,以获得多个测量点的高度数据。
4.限差设置:-徕卡DNA03电子水准仪可以根据实际需求来设置限差。
-在仪器的菜单中,找到限差设置选项,进入设置界面。
-根据需要,设置高差的限差范围。
限差可以设置为正负值,表示高差的允许范围。
-设置完成后,保存设置并退出菜单。
需要注意的是,在使用水准仪进行测量时,应尽可能减小观测误差。
以下是一些较常见的注意事项:1.环境条件:水准仪的测量结果可能受到环境因素的影响,如风力、温度、湿度等。
在测量过程中,应尽量避免这些因素对仪器的干扰。
2.操作注意:在进行观测时,应轻拿轻放,避免碰撞或抖动。
同时,还应注意保持仪器的稳定和水平,以获得更准确的测量结果。
3.校准:定期对水准仪进行校准是保持测量精度的重要步骤。
校准过程中应注意操作规范,并按照校准手册的指导进行。
4.数据记录:在测量过程中,应及时记录测量数据,并进行数据处理和分析。
这有助于提高测量结果的可靠性和准确性。
总结起来,徕卡DNA03电子水准仪的使用方法相对简单,但仍需遵循一定的操作规范和注意事项。
相关的限差设置可以根据实际需求进行调整,以满足具体的测量要求。
水准仪i角快速自检之调校应用_1
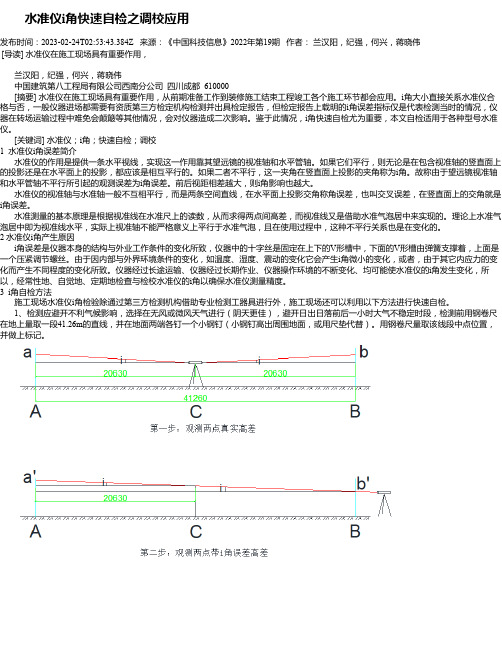
水准仪i角快速自检之调校应用发布时间:2023-02-24T02:53:43.384Z 来源:《中国科技信息》2022年第19期作者:兰汉阳,纪强,何兴,蒋晓伟[导读] 水准仪在施工现场具有重要作用,兰汉阳,纪强,何兴,蒋晓伟中国建筑第八工程局有限公司西南分公司四川成都 610000 [摘要] 水准仪在施工现场具有重要作用,从前期准备工作到装修施工结束工程竣工各个施工环节都会应用。
i角大小直接关系水准仪合格与否,一般仪器进场都需要有资质第三方检定机构检测并出具检定报告,但检定报告上载明的i角误差指标仅是代表检测当时的情况,仪器在转场运输过程中难免会颠簸等其他情况,会对仪器造成二次影响。
鉴于此情况,i角快速自检尤为重要,本文自检适用于各种型号水准仪。
[关键词] 水准仪;i角;快速自检;调校1 水准仪i角误差简介水准仪的作用是提供一条水平视线,实现这一作用靠其望远镜的视准轴和水平管轴。
如果它们平行,则无论是在包含视准轴的竖直面上的投影还是在水平面上的投影,都应该是相互平行的。
如果二者不平行,这一夹角在竖直面上投影的夹角称为i角。
故称由于望远镜视准轴和水平管轴不平行所引起的观测误差为i角误差。
前后视距相差越大,则i角影响也越大。
水准仪的视准轴与水准轴一般不互相平行,而是两条空间直线,在水平面上投影交角称角误差,也叫交叉误差,在竖直面上的交角就是i角误差。
水准测量的基本原理是根据视准线在水准尺上的读数,从而求得两点间高差,而视准线又是借助水准气泡居中来实现的。
理论上水准气泡居中即为视准线水平,实际上视准轴不能严格意义上平行于水准气泡,且在使用过程中,这种不平行关系也是在变化的。
2 水准仪i角产生原因 i角误差是仪器本身的结构与外业工作条件的变化所致,仪器中的十字丝是固定在上下的V形槽中,下面的V形槽由弹簧支撑着,上面是一个压紧调节螺丝。
由于因内部与外界环境条件的变化,如温度、湿度、震动的变化它会产生i角微小的变化,或者,由于其它内应力的变化而产生不同程度的变化所致。
徕卡数字水准仪操作说明
徕卡数字水准仪 操作说明目 录一、仪器简介………………………………………………………………………P2二、键盘功能………………………………………………………………………P3三、显示符号………………………………………………………………………P4四、仪器系统参数的设置…………………………………………………………P5五、水准测量1、简单水准测量⎯MO方式…………………………………………………P82、等外水准测量⎯BF方式…………………………………………………P83、等级水准测量⎯BFFB方式………………………………………………P94、间视水准测量⎯IN方式…………………………………………………P95、注意事项…………………………………………………………………P10六、数据管理………………………………………………………………………P10七、仪器检测………………………………………………………………………P11八、数据格式………………………………………………………………………P12九、出错信息………………………………………………………………………P12十、仪器保养………………………………………………………………………P13一、仪器简介数字水准仪是一种高精度的电子水准仪,其配套的水准尺为条码水准尺。
数字水准仪的测量原理是:当水准仪照准条码尺时,一按测量键,则水准仪内部的CCD拍下了一段条码尺的影像,仪器内部的计算机对该影像进行图修处理,计算出被测点的标尺读数和视距值。
利用数字水准仪进行测量,整个观测过程,如标尺读数、数据记录、结果计算、成果显示等等都是自动进行的,这就消除了读数误差、记录错误和计算错误,大大提高了外业观测的速度和精度。
一套数字水准仪主要包括:主机一台、GEB70电池一块、GKL22充电器一个、678电缆一根、GST05脚架一个、GRM10模块两块,GIF12读卡器一个,接口电缆一根、条码水准尺一对、尺垫一对。
关于徕卡水准仪i角的检验与调校
关于徕卡水准仪i角的检验与调校不止一位同事来电问,关于徕卡水准仪NA2 i 角的变化,已经买了半年的仪器,由于i角的变化已先后二次邮寄徕卡仪器维修中心进行处理,在使用半个月左右又是这样,第三次修理后依然有变化,其i角的变化约有好几根丝。
经过认真考虑,我回答如下,希望能有助于大家的工作。
1,数年的经验告诉我们,水准仪仅仅是i角的正常变化不属于保修范围,恳请不要邮寄千里之外的徕卡仪器维修中心调节,请用户或我们当地服务中心工作人员协助测定与调整。
2,水准仪产生i角变化的原因是仪器本身的结构与外业工作条件的变化而致,仪器中的十字丝是固定在上下的V形槽中,下面的V形槽由弹簧支撑着,上面是一个压紧调节螺丝。
由于因内部与外界环境条件的变化,如温度、湿度、震动的变化它会产生i角微小的变化,或者,由于其它内应力的变化而产生不同程度的变化也是不足为奇的。
3,在用户说明书中已明确,水准仪的i角可由用户自行调整。
请参照徕卡NA2水准仪说明书第22-23页,徕卡NA720/NA724/NA728/NA730水准仪说明书第21页。
4,什么是水准仪的i角?水准仪的视准轴在垂直方向与水准轴的夹角。
5,现在,再扼要地介绍水准仪i角的测定办法:如图所示,将水准仪置平在二支水准标尺的中间,仪器距标尺约30米或40米,前后大约等距离,读取标尺上的读数得到二点的高差值。
搬迁仪器至二支标尺的一内侧或外侧均可,此时,仪器至标尺的距离分别为近距离的标尺只是几米,而远距离的标尺已是几十米。
同样,测量这二点的高差值,如果二次测得的高差相等,说明仪器i角为零。
高差不等就说明仪器存在着i角的误差。
如:仪器在中间,读取A尺的读数a1=0962,B尺的读数b1=1062仪器在一侧,读取A尺的读数a2=0835,B尺的读数b2=0933h1=-1062+0962=-0100h2=-0933+0835=-0098△h=-0098+0100=+2 mm按小角公式计算i角;i=Δ·ρ/s = 2 mm × 206265” / 60000mm = 41 / 6 ” = 7”6,水准仪i角的允许误差水准仪i角允许误差的概念应该说有三方面的涵义,也是三种情况下的不同要求;出厂时工厂调校的允许误差、用户调校时的允许误差、测量等级或规定所要求的允许误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于徕卡水准仪i角的检验与调校
不止一位同事来电问,关于徕卡水准仪NA2i 角的变化,已经买了半年的仪器,由于i角的变化已先后二次邮寄徕卡仪器维修中心进行处理,在使用半个月左右又是这样,第三次修理后依然有变化,其i角的变化约有好几根丝。
经过认真考虑,我回答如下,希望能有助于大家的工作。
1,数年的经验告诉我们,水准仪仅仅是i角的正常变化不属于保修范围,恳请不要邮寄千里之外的徕卡仪器维修中心调节,请用户或我们当地服务中心工作人员协助测定与调整。
2,水准仪产生i角变化的原因是仪器本身的结构与外业工作条件的变化而致,仪器中的十字丝是固定在上下的V形槽中,下面的V形槽由弹簧支撑着,上面是一个压紧调节螺丝。
由于因内部与外界环境条件的变化,如温度、湿度、震动的变化它会产生i角微小的变化,或者,由于其它内应力的变化而产生不同程度的变化也是不足为奇的。
3,在用户说明书中已明确,水准仪的i角可由用户自行调整。
请参照徕卡NA2水准仪说明书第22-23页,徕卡NA720/NA724/NA728/NA730水准仪说明书第21页。
4,什么是水准仪的i角?水准仪的视准轴在垂直方向与水准轴的夹角。
5,现在,再扼要地介绍水准仪i角的测定办法:如图所示,
将水准仪置平在二支水准标尺的中间,仪器距标尺约30米或40米,前后大约等距离,读取标尺上的读数得到二点的高差值。
搬迁仪器至二支标尺的一内侧或外侧均可,此时,仪器至标尺的距离分别为近距离的标尺只是几米,而远距离的标尺已是几十米。
同样,测量这二点的高差值,如果二次测得的高差相等,说明仪器i角为零。
高差不等就说明仪器存在着i角的误差。
如:仪器在中间,读取A尺的读数a1=0962,B尺的读数b1=1062
仪器在一侧,读取A尺的读数a2=0835,B尺的读数b2=0933
h1=-1062+0962=-0100
h2=-0933+0835=-0098
△h=-0098+0100=+2 mm
按小角公式计算i角;
i=Δ·ρ/s = 2 mm × 206265” / 60000mm = 41 / 6 ” = 7”
6,水准仪i角的允许误差
水准仪i角允许误差的概念应该说有三方面的涵义,也是三种情况下的不同要求;出厂时工厂调校的允许误差、用户调校时的允许误差、测量等级或规定所要求的允许误差。
如徕卡NA2i角的允许误差:
出厂调校为:±8”
用户调校为:±20”
但是,根据我国国家水准测量规范和工程测量规范的要求,用于一、二等水准测量的水准仪,仪器的i角不应超过15”,用于三、四等水准测量的仪器,仪器的i角不应超过20”。
所以,在用徕卡水准仪NA2加GPM3测微分划板进行一、二等水准测量时,仪器的i角必须调校至15”以内,在进行三等以下水准测量时,仪器的i角应在20” 以内。
i角的测定也可以按右图,水准仪可以放置在二支水准标尺二外侧的方法测定仪器的i角。
道理是一样的,图中正确的a4值是;
a4 = a1’- a2’+ a3’
7,改正水准仪i角的方法就是转动V形槽上面螺丝钉的位置,旋进或旋出。
仪器处在不同的位置请注意加减符号。
朋友们,仪器经过长途运输、仪器经过长期作业、仪器操作环境的不断变化、均可能使水准仪的i角发生变化,所以,经常性地、自觉地、定期地,检查与调节水准仪的i角不仅是确保测量精度的需要,也是我们测量人员的美德。
(选自徕卡内部通讯)
发布人:徕卡客户服务中心吕绍裘
2002-7-18 17:14:26。