机器人足球程序设计的练习
机器人踢足球

机器人踢足球上周我们更新了机器人打篮球的案例,这周我们更新机器人通过视觉实现自主踢球的功能。
预期效果:利用颜色的HSV定位足球,并自主寻找到足球位置执行踢球动作。
1.如果站立能看到足球,说明足球距离机器人比较远,需要执行前进靠近足球。
如果站立时看不到足球就执行小弯腰,小弯腰检测到足球了,说明足球离机器人已经不远了,这个时候机器人执行动作靠近足球,但是要控制好执行的次数。
2.如果站立和小弯腰都看不到足球,说明足球离机器人很近了,需要执行大弯腰来检测足球的位置。
3.在确定好足球位置后,走到足球前再执行踢球动作。
一、利用HSV定位物体1、利用HSV识别颜色RGB颜色空间利用三个颜色分量的线性组合来表示颜色,任何颜色都与这三个分量有关,而且这三个分量是高度相关的,所以连续变换颜色时并不直观,想对图像的颜色进行调整需要更改这三个分量才行。
自然环境下获取的图像容易受自然光照、遮挡和阴影等情况的影响,即对亮度比较敏感。
HSV(Hue, Saturation, Value)是根据颜色的直观特性创建的一种颜色空间, 也称六角锥体模型(Hexcone Model)。
这个模型中颜色的参数分别是:色调(H),饱和度(S),亮度(V)。
对于图像而言HSV颜色空间比RGB更接近人们对彩色的感知经验。
非常直观地表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比。
(HSV颜色模块的运用与RGB颜色模块的使用相同)二、程序编写1、利用函数编写程序1)机器人在站立状态下检测到一个足球时,可以判断是向左走、向右走还是慢慢走;2)机器人看不到足球时,设计一个弯腰动作,弯腰时能看到足球,机器人站立,判断向左还是向右移动;3)当机器人弯腰或看不到足球时,进行大弯动作,检测足球是否在脚下,检测到足球时,站立,判断向左移动。
4)大弯检测不到足球,机器人回到小弯,左右移动头部检测足球,判断左右转向。
(机器人远看识别足球程序)(机器人小弯腰识别足球程序)(机器人大弯腰识别足球程序)(机器人转动头部识别足球程序)编写总程序,将4个函数模块调用到识别到足球的总程序中参考网址:。
机器人足球赛程序设计实验指导书

机器人足球赛程序设计实验指导书(本指导书版权归合肥工业大学机器人足球研究小组所有)实验1 机器人足球比赛编程预备知识1、实验目的掌握RoboCup仿真机器人足球比赛相关知识点,具体内容如下:(1) L inux操作系统的熟悉及了解其基本操作。
(2) 掌握Linux下如何进行C++编程,了解gcc编译器以及一些简单编辑工具,如:vi、emacs、gedit、Anjuta、Kdevelope等。
(3) 启动RoboCup仿真(2D)足球队的比赛。
2、实验设备硬件环境:PC机软件环境:操作系统Linux3、实验内容(1)掌握Linux一些常用的命令:z更改账号密码格式:passwd输入后,屏幕显示:Old password: <输入旧密码>New password: <输入新密码>Retype new password: <确认新密码>z联机帮助格式: man [命令名]例如: man ls屏幕上就会显示所有ls的用法。
z文件或目录处理格式:ls [-atFlgR][name]第一项是一些语法加量。
第二项是文件名。
常用的方法有:ls 列出当前目录下的所有文件。
ls –a 列出包括以.开始的隐藏文件的所有文件名。
ls –t 依照文件最后修改时间的顺序列出文件名。
ls –F 列出当前目录下的文件名及其类型。
以/结尾表示为目录名、以*结尾表示未可执行文件、以@结尾表示为符号连接。
ls –l 列出目录下所有文件的权限、所有者、文件大小、修改时间及名称。
ls –lg 同上,并显示出文件的所有者工作组名。
ls –R 显示出目录下以及其所有子目录的文件名。
z改变工作目录格式:: cd [name]name :目录名、路径或目录缩写。
常用的方法有:cd 改变目录位置至用户登录时的工作目录。
cd dirl 改变目录位置至dirl目录下。
cd ~user 改变目录位置至用户的工作目录。
机器人程序设计(C语言)(第2版)章节练习题及参考答案

第一章一种新的C语言学习方式1.一台能够工作的计算机包括?CPU (Central Processing Unit,中央处理单元,进行运算和控制,包括运算器和控制器等)、存储器(如RAM、ROM等)、输入设备、输出设备(包括串行/并行接口、USB等)。
其中,RAM (RandomAccess Memory,随机存储器)主要用于存储数据,ROM (RcadOnlyMemory, 只读存储器)主要用于存储程序。
2.单片机工作时需要什么?需要稳定的电源、晶振、外部存储器和编程调试接口,就像计算机工作时需要电源、晶振、硬盘或其他大容量外部存储器和操作系统一样。
微控制器是将单片机独立工作所需的电源适配器、晶振、外部存储器和串口转换电路等封装到一个模块上,这样就能直接与计算机连接并进行编程开发,不需任何其他芯片和电路。
3. AT89S52是一种什么样的单片机?是一种高性能、低功耗的8位单片机,内含8 KBISPdn-System Programmable系统在线编程)可反复擦写IOOO次的Flash只读程存器,采用ATMEL公司的高密度非易失性存储技术制造,兼容标准MCS51指令系统及其引脚结构。
在实际工程应用中,功能强大的AT89S52 已成为许多高性价比嵌入式控制应用系统的解决方案。
4. Progisp是一款什么样的软件?是一款免费下载的ISP软件,不需要专门的安装即可使用,非常方便。
使用该软件,读者可以将C语言程序生成的可执行文件下载到机器人单片机上。
使用时需要1根USBA转B 信号线。
5.简述串口调试工具的特点。
串口调试工具就是串行通信接口调试软件,集数据发送、数据接收、数据监控、数据分析等功能于一身,具有小巧精致、操作简捷、功能强大的特点,可以在串口通信监控、设备通信测试工作中有效提高效率。
6. pr i ntf ()函数称为?称为格式输出函数,其功能是按用户指定的格式,把指定的数据输出显示。
Print ()函数是C语言提供的标准输出函数,定义在C语言的标准函数库中,要使用它,必须包括定义标准函数库的头文件stdio. h o第二章最简单的C程序设计——机器人做算数1. C语言用什么整型变量?C语言用关键字imt定义整型变量。
机器人足球实验报告

机器人足球实验报告摘要:随着科学技术的不断发展,机器人技术日益成熟,机器人足球作为一种新型的竞技项目在世界范围内得到了广泛的关注和发展。
本实验以机器人足球为研究对象,旨在探究机器人在足球比赛中的性能表现,并对机器人足球比赛中的一些关键问题进行分析和解决。
一、引言机器人足球是一项融合了机械、电子、计算机等多学科知识的综合性竞技项目。
与传统足球不同,机器人足球通过机器人来参与比赛,融入了自动控制、图像识别、路径规划等技术,具有很大的研究价值和实践意义。
二、实验设计与方法本实验以一支机器人足球队为基础,通过对机器人的硬件和软件进行优化,提高机器人的灵活性和对足球的感知能力。
同时,在比赛中分析机器人队伍的战术布局和策略。
首先,我们对机器人的机械结构进行了改进,增加了关节活动范围,提高了机器人的灵活性,使机器人能更好地进行射门、传球和防守等动作。
其次,我们优化了机器人的电子控制系统,增加了感知模块和数据处理单元,提高了机器人对足球和环境的感知能力。
通过图像识别和目标检测算法,机器人能够更准确地识别和跟踪足球,并做出相应的动作。
最后,在比赛中,我们运用了智能算法和策略来指导机器人的行动,如路径规划、团队协作、进攻与防守等。
通过不断的调整和优化,提高了机器人足球队的整体战术水平。
三、实验结果与讨论在实验中,我们对机器人足球队的性能进行了评估。
通过与其他队伍的比赛,我们发现我们的机器人足球队在射门、传球和防守方面表现出色。
机器人的投射精度和射门速度较高,传球的准确性和防守的及时性也得到了很好的提升。
然而,我们也遇到了一些问题。
在比赛中,机器人的感知和决策能力仍然有所不足,有时会出现误判的情况,导致比分失利。
此外,机器人队伍的协作能力也需要进一步提高,以便更好地配合战术运作。
四、结论与展望通过本次实验,我们对机器人足球的发展和应用有了更深入的理解。
机器人足球作为一种新型的竞技项目,具有巨大的潜力和发展空间。
在未来,我们希望能够进一步完善机器人足球队的感知和决策能力,并加强机器人队伍之间的协作,提高机器人足球比赛的整体水平。
机器人足球C语言教程
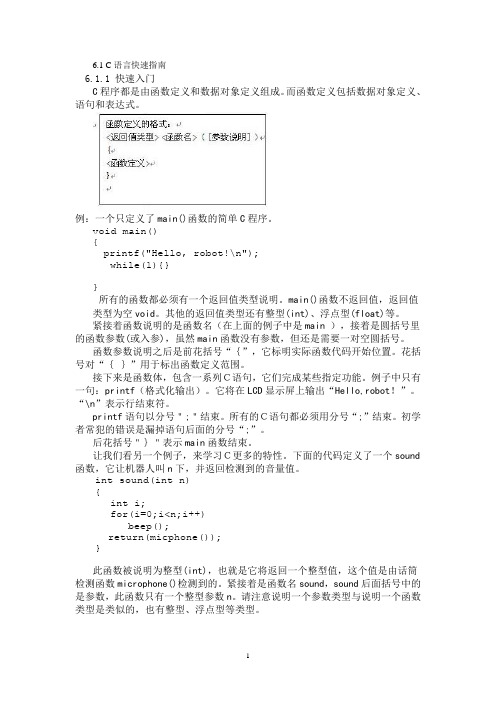
6.1 C语言快速指南6.1.1 快速入门C程序都是由函数定义和数据对象定义组成。
而函数定义包括数据对象定义、语句和表达式。
例:一个只定义了main()函数的简单C程序。
void main(){printf("Hello, robot!\n");while(1){}}所有的函数都必须有一个返回值类型说明。
main()函数不返回值,返回值类型为空void。
其他的返回值类型还有整型(int)、浮点型(float)等。
紧接着函数说明的是函数名(在上面的例子中是main ),接着是圆括号里的函数参数(或入参),虽然main函数没有参数,但还是需要一对空圆括号。
函数参数说明之后是前花括号“{”,它标明实际函数代码开始位置。
花括号对“{}”用于标出函数定义范围。
接下来是函数体,包含一系列C语句,它们完成某些指定功能。
例子中只有一句:printf(格式化输出)。
它将在LCD显示屏上输出“Hello,robot!”。
“\n”表示行结束符。
printf语句以分号";"结束。
所有的C语句都必须用分号“;”结束。
初学者常犯的错误是漏掉语句后面的分号“;”。
后花括号"}"表示main函数结束。
让我们看另一个例子,来学习C更多的特性。
下面的代码定义了一个sound 函数,它让机器人叫n下,并返回检测到的音量值。
int sound(int n){int i;for(i=0;i<n;i++)beep();return(micphone());}此函数被说明为整型(int),也就是它将返回一个整型值,这个值是由话筒检测函数microphone()检测到的。
紧接着是函数名sound,sound后面括号中的是参数,此函数只有一个整型参数n。
请注意说明一个参数类型与说明一个函数类型是类似的,也有整型、浮点型等类型。
在一个函数中定义的参数变量,如sound函数中的n,只在这个函数中有效。
别的函数也可以定义使用与之同名的参数变量,而不会相互干扰。
机器人足球实验报告
一、实验目的掌握RoboCup仿真机器人足球比赛相关知识点,具体内容如下:(1)L inux操作系统的熟悉及了解其基本操作。
(2)掌握Linux下如何进行C++编程,了解gcc编译器以及一些简单编辑工具,如:vi、emacs、gedit、Anjuta、Kdevelope等。
(3)启动RoboCup仿真(2D)足球队的比赛。
二、实验设备硬件环境:PC机软件环境:操作系统linux三、实验内容(1)掌握Linux 一些常用的命令a)如何找到用户主目录的绝对路径名?在自己的系统上,用户主目录的绝对路径名是什么?pwd /home/student(2)将当前工作目录从/home/UVA 转到/home/Tsinghua 需要使用什么命令?如何显示当前目录?cd /home/Tsinghua(3)如何在当前目录下建立子目录RoboCup?mkdir Robcup(4)如何删除子目录RoboCup?rmdir Robcup(5)如何查看当前目录下的内容?ls(6)如何将文件start.sh 的权限设定为:start.sh 属于可读、可写、可执行?chmod 777 start.sh(7)如何将当前目录包括所有子目录全部做备份文件,备份文件名为first.tar?tar xvf dir1 first.tar(8)如何将目录/home 下每一个文件压缩成.gz 文件?tar -zcwf store.tar(9)如何把上例中每个压缩的文件解压,并列出详细的信息?tar xvf store.tarLs -lg1、实验目的(1)了解Demeer5的工作原理(2)学会对Demeer5进行简单的修改二、实验设备硬件环境:PC软件环境:Linux三、实验内容(1)如果可踢球就用最大力踢球else if( WM->isBallKickable()) // 如果球已知,而且当前球在我脚下(可踢) {VecPosition pos=( PITCH_LENGTH/2.0,(-1 + 2*(WM->getCurrentCycle()%2)) *0.4 * SS->getGoalWidth() );soc=kickTo(pos,SS->getBallSpeedMax());ACT->putCommandInQueue( soc ); // 放入命令队列ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc ));}(2)如果球不可踢且我是队友中最快到达球的队员,则去截球else if( WM->getFastestInSetTo( OBJECT_SET_TEAMMATES, OBJECT_BALL, &iTmp )== WM->getAgentObjectType() && !WM->isDeadBallThem() )// 如果球不在我的控制范围下,但是当前能最快抢到球的是我,那我就去执行抢球动作{Log.log( 100, "I am fastest to ball; can get there in %d cycles", iTmp );soc = intercept( false );ACT->putCommandInQueue( soc );ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc ));(3)其他情况按战略点跑位else if( posAgent.getDistanceTo(WM->getStrategicPosition()) >1.5 + fabs(posAgent.getX()-posBall.getX())/10.0) // 到了这里就是其他距离球相对远一点的人了,如果离自己的阵形点太远,就跑回自己的阵形点去。
足球机器人程序笔记

程序启动双击“快速启动”按钮进入CVoyVideoDlg::OnAutostart()1、OnChangeid(); //设置球员ID2、OnCapstart(); //打开全景摄像头,循环调用函数CGetImage::AfterUpdateOverlook(BYTE *pBuffer, long lWidth, long lHeight, double dbTime, UINT nState)OnCapstart()->m_Camera.Create(0,&m_cPreview,0)AfxBeginThread(threadGrabImage, this ,THREAD_PRIORITY_TIME_CRITICAL); AfxBeginThread(threadProcess, this ,THREAD_PRIORITY_TIME_CRITICAL); threadGrabImage获取图像线程threadProcess 接收图像并显示,调用pCam->doBehLoop()doBehLoop()调用AfterUpdateOverlook(m_behImgBuf,m_nImgWidth,m_nImgHeight,1,0)3、OnHsi(); //打开颜色阈值文件,并加载m_find.wenjian.LoadHSIFromINI(".\\Config\\Default.vsn",&(m_find.m_hsiset),&m_cStatusL ist);HSISetm_hsiset;typedefstructVoyHSISet{HSIParam blue; //蓝色球门HSIParam yellow; //黄色球门HSIParam green; //绿色地毯HSIParamoverball; //全景球HSIParam teammate; //队友色标HSIParamfrontball;HSIParamwhitelines; //白色场线HSIParamoppo; //黑色障碍intyear,month,day,hour,minute,second;CameraPropertycameraproc;}HSISet;4、OnButton1(); //打开串口BOOL res = m_Com.Create(m_nPort);5、OnCntcoach();//链接教练机,建立UDP通信,监听端口为ID+20090,教练机端口为20090配置文件保存在".\\Config\\default.cfg"中,BOOL CVoyVideoDlg::OnInitDialog()执行LoadCfg()加载配置。
制作六 足球机器人

制作六足球机器人一、任务描述每个队各自管理两台自主机器人在“足球”场地内“踢球”。
以进球多少确定最终成绩。
场地示意图如图6-1所示图6-1 场地示意图场地说明:外框:整个场地围墙高18cm。
内壁为消光黑色。
球门:球门位于场地底线的中间,宽60cm,深15cm,门前有一条宽0.8cm 的红色球门线。
内壁为消光灰色。
底面:底面是一张黑白渐变纸,大小为160cm×240cm。
比赛场地应设在平整的地板上。
注意保持底面的水平度和平直度。
球门区:从球门线两端向中场延伸20cm的矩形区域。
点球位:两个半场内距球门线中点垂直距离60cm处。
开球点:球场中央点。
坠球点:经过点球位,与中场线平行,形成2条线;再将球场纵向4等份,形成3条线。
这样,包括中场线在内的6条线所形成的9个交点即为坠球点(见上图)。
(在真实的场地中坠球点没有明显标志)球:比赛将使用红外线球,外径为≤90mm,重130g。
如图6-2所示图6-2 比赛用球一、硬件组装机器人在场地中需要寻找足球,要用到光检测模块,考虑到准确定位和寻找范围,在足球机器人上加了3个光检测模块;另足球比赛中球是任意滚动的,所以在机器人的前方和后方分别装了3个光检测模块;准确定位足球后需要判断场地方向,机器人上安装了一个模拟光电模块(可以识别渐变色)。
具体的安装方法如图6-3所示。
图6-3 足球机器人具体的安装方法二、程序设计1.输入/输出端口说明PIN10 前方中间光电接收模块,为0表示找到足球,为1表示没找到足球PIN11 后方中间光电接收模块,为0表示找到足球,为1表示没找到足球PIN12 前方右侧光电接收模块,为0表示找到足球,为1表示没找到足球PIN13 前方左侧光电接收模块,为0表示找到足球,为1表示没找到足球PIN14 后方右侧光电接收模块,为0表示找到足球,为1表示没找到足球PIN15 后方左侧光电接收模块,为0表示找到足球,为1表示没找到足球ADZH(0)地面灰度检测1.程序流程图3.程序清单(仅供参考,数据需要调整)dirb0=%11100000 rem定义0,1,2,3,4号端口为输出端口;rem 5,6,7号端口为输入端口dirb1=%11111100 rem定义8,9号端口为输出端口;rem 10,11,12,13,14,15号端口为输入端口pinb0=0 rem将专用变量PINB0清0pinb1=0 rem将专用变量PINB1清0pause 300 rem机器人初始停止300毫秒pinb0=%00010101pause 1500 rem前进1500毫秒start:pinb0=0pause 1 rem停止1毫秒test_ball:a=adzh(0) rem读取地面颜色将其转换成数值送给变量Aif pin10=0 then a5 rem前方中间光电接收管产生信号执行A5if pin11=0 then a6 rem后方中间光电接收管产生信号执行A6 if (pin13=1) and (pin12=0) then yz rem前方右侧光电接收管有信号,rem左侧没产生信号,执行右转 if (pin13=0) and (pin12=1) then zz rem前方左侧光电接收管有信号,rem右侧没产生信号,执行左转 if (pin14=1) and (pin15=0) then yz rem后方左侧光电接收管有信号,rem右侧没产生信号,执行右转 if (pin14=0) and (pin15=1) then zz rem后方右侧光电接收管有信号,rem左侧没产生信号,执行左转 goto yz rem执行右转a5:pinb0=%00010101pause 200 rem前进200毫秒a1=adzh(0) rem读取地面颜色将其转换成数值送给变量A1pinb0=0pause 200 rem停止200毫秒if a>=a1 then qj rem变量A大于等于A1执行前进goto zz1 rem执行左转a6:pinb0=%00011010pause 200 rem后退200毫秒a1=adzh(0) rem读取地面颜色将其转换成数值送给变量A1 pinb0=0pause 200 rem停止200毫秒if a>=a1 then qjx rem变量A大于等于A1执行后退goto zz1 rem执行左转qjx:pinb0=%00011010pause 600 rem后退600毫秒goto bzzz1:pinb0=%00010101pause 50pinb0=%00010110 rem前进pause 300for b2=0 to 20pinb0=%00011001pause 30pinb0=%00010101 rem机器人右转画弧pause 10nextgoto startyz:if pin10=0 then a5 rem前方中间光电接收管产生信号执行A5 if pin11=0 then a6 rem后方中间光电接收管产生信号执行A6 pinb0=%00011001pause 20 rem右转if pin12=0 then qj4 rem前方右侧光电接收管有信号执行QJ4 if pin15=0 then qj5 rem后方左侧光电接收管有信号执行QJ5 goto yzqj:pinb0=%00010101pause 600 rem前进goto bzqj4:pinb0=%00010101pause 20 rem前进goto startqj5:pinb0=%00011010pause 20 rem后退goto startzz:if pin10=0 then a5 rem前方中间光电接收管产生信号执行A5 if pin11=0 then a6 rem后方中间光电接收管产生信号执行A6 pinb0=%00010110pause 20 rem左转if pin13=0 then qj4 rem前方左侧光电接收管有信号执行QJ4 if pin14=0 then qj5 rem后方右侧光电接收管有信号执行QJ5goto zzbz:a=adzh(0)if (pin12=0) or (pin13=0) or (pin14=0) or (pin15=0) or (pin10=0) or (pin11=0) then start rem所有的光电接收管只要有一个有信号rem执行STARTpinb0=%00011001pause 30pinb0=%00010101 rem右转前进pause 10goto bzend。
机器人足球代码1

机器人足球代码1足球机器人程序代码//应用程序模板#include//判断自身与球的方位是否危险bool AzimuthDanger(){double ballX = getBallX();double myX = getX();double radius = getBallRadius()+getRadius();if(getAttack()>0 && myX+radius*2>ballX) return true;if(getAttack()<0 && myX-radius*2<="">if( (getAttack()>0 && getBallX()getCourtWidth()/2) ){if((getBallY()>getCourtHeight()/2)&&(getY()>getBallY()))ret ur n true;if((getBallY()<="">}return false;}//判断球的运动方向返回true 危险bool JudgeDanger(){double ballX = getBallX();double ballY = getBallY();double goalMin = getCourtHeight()/2-getGoalWidth()/2;double goalMax = getCourtHeight()/2+getGoalWidth()/2;double b = ballY - tan(getBallHeading())*ballX;if(getAttack()>0 && getBallHeading()>PI/2 &&getBallHeading()<="">if(goalMin<50*tan(getBallHeading()) + b &&goalMax>50*tan(getBallHeading()) + b)return true;else return false;}else if(getAttack()<=0 && (getBallHeading()>=0 && getBallHeading()3*PI/2)){if(goalMin<goalmax)<="" bdsfid="102" p="" tan(getballheading())*(getcourtwidth()="">return true; else return false;}else return false;}//预测足球在times个单位时间后的位置void Next(int times, double* nextX, double* nextY){double velocity = getBallVelocity();double heading = getBallHeading();double acc = -getBallNegativeAcceleration();*nextX = getBallX();*nextY = getBallY();for (int i = 0; i < times; i++){if(velocity==0) break;nextPoint(*nextX, *nextY, heading, velocity, nextX, nextY);// 摩擦减速if (velocity > 0) velocity = fmax(0, velocity+acc);else if (velocity < 0) velocity = fmin(0, velocity -acc);// 撞墙检测if ((*nextX) < 0 || (*nextX) > getCourtWidth()){heading = PI - heading;modifyInCourt(nextX, nextY, getBallRadius());}if ((*nextY) < 0 || (*nextY) > getCourtHeight()){heading = -heading;modifyInCourt(nextX, nextY, getBallRadius());}}}// 跌代计算球的运行线路,计算未来的击球点void OptimumPosition(double* hitedX ,double* hitedY ){*hitedX = getBallX();*hitedY = getBallY();for (int i = 0; i < 200; i++){double nextX, nextY;Next(i, &nextX, &nextY);if (distance(nextX, nextY, getX(), getY()) < i * getMaxMoveVelocity()){hitedX = &nextX;hitedY = &nextY;break;}}}//1v1得到敌机坐标double getBotX(){int id = getAttack()>0? 1:0;struct Bot bot;getBotById(id, &bot);return bot.x;}double getBotY(){int id = getAttack()>0? 1:0;struct Bot bot;getBotById(id, &bot);return bot.y;}double getBotVelocity(){int id = getAttack()>0? 1:0;struct Bot bot;getBotById(id, &bot);return bot.moveVelocity;}bool BotBallBotDistance(){double MDistance = distance(getX(), getY(), getBallX(), getBallY()); double DDistance = distance(getBotX(), getBotY(), getBallX(), getBallY());if(MDistance<="">return false;}//将球踢向目标void Shoot(double targetX, double targetY){double ballX, ballY;OptimumPosition(&ballX,&ballY);double Rn=0.93;Rn= (AzimuthDanger() && getBallVelocity()>getMaxMoveVelocity()/2) ? Rn=1.1 : Rn=0.93;double MDDistance = distance(getX(), getY(), getBotX(), getBotY()); //争球if(getBallVelocity() < getMaxMoveVelocity()/2&& MDDistance<=getBallRadius()*2+getRadius()*2&& (getX()==getBotX() || getY()==getBotY())) Rn=0.1;if(getBotVelocity()==0) Rn=0.93;//R越小,抢劫能力就越强,R越大,防守能力越强double R =((getBallRadius() + getRadius())*Rn);double tangentX1, tangentX2, tangentY1, tangentY2;double bestHitX, bestHitY;double distanceT oTarget = distance(targetX, targetY, getX(), getY());if(distanceToTarget<="" p="" targety,="" {setmovetoward(targetx,="">double tangentBearing = acos(R/distanceT oTarget);double ballToMeHeading = heading(ballX, ballY, getX(), getY());nextPoint(ballX, ballY, ballToMeHeading + tangentBearing,R,&tangentX1, &tangentY1);nextPoint(ballX, ballY,ballToMeHeading - tangentBearing,R,&tangentX2, &tangentY2);nextPoint(ballX, ballY,heading(targetX, targetY, ballX,ballY),R,&bestHitX, &bestHitY);modifyInCourt(&tangentX1, &tangentY1, getRadius());modifyInCourt(&tangentX2, &tangentY2, getRadius());modifyInCourt(&bestHitX, &bestHitY, getRadius());double xx=0;double yy=0;if (distance(getX(), getY(), bestHitX, bestHitY) < distance(getX(), getY(), tangentX1, tangentY1)){xx=bestHitX; yy=bestHitY;}else if (distance(bestHitX, bestHitY, tangentX1, tangentY1) < distance(bestHitX, bestHitY, tangentX2, tangentY2)){xx=tangentX1; yy=tangentY1;}else{xx=tangentX2; yy=tangentY2;}//防止争边球if(getX()>(getBallRadius()+getRadius())*3 ||getX()<getcourtwidth()-(getballradius()+getradius())*3)< bdsfid="226" p=""></getcourtwidth()-(getballradius()+getradius())*3)<>{double jj= getBallRadius()-getRadius()>0 ? getBallRadius()-getRadius() : getRadius()-getBallRadius();yy = MIN(getCourtHeight()-jj, yy);yy = MAX(jj, yy);//抄近路拦截double MDistance = distance(getX(), getY(), getBallX(), getBallY());double DDistance = distance(getBotX(), getBotY(), getBallX(), getBallY());if(DDistance<mdistance)< bdsfid="236" p=""></mdistance)<>{if(getBallVelocity()>getMoveVelocity()/2){int fx;if(getBallY()>getCourtHeight()/2)fx=1;else fx=-1;yy+=fx*getBallRadius()*2;}}//沿对门边路滚动时的防范措施if(getBallHeading()==PI/2 || getBallHeading()==3*PI/2){double bx=getAttack()>0 ? getCourtWidth()-getBallRadius() : getBallRadius();if(getBallX()==bx &&getBallVelocity()>getMaxMoveVelocity()*2/3){double jj=getBallRadius();xx=getAttack()>0? xx-jj : xx+jj;}}setMoveToward(xx, yy, getMaxMoveVelocity());void ShootGoal() //射门{double targetX = getOpponentGoalCenterX();double targetY = getOpponentGoalCenterY();Shoot(targetX, targetY);}void ShootAttack() //带球射门波浪式进攻{double targetX= getAttack()>0 ? getBallX()*2 : getBallX()/2;double targetY=0;if( (getAttack()>0 && getBallX()getCourtWidth()*2/5) ){if(getY()< bdsfid="273" p=""><>if(getBallY()targetY = MIN(getCourtHeight() / 2 + getGoalWidth() / 2 - getBallRadius(), targetY);targetY = MAX(getCourtHeight() / 2 - getGoalWidth() / 2 + getBallRadius(), targetY);Shoot(targetX, targetY);}else ShootGoal();}//防止乌龙的策略void Owngoal(){if(JudgeDanger()){double Radius = getBallRadius() + getRadius();double Distance = distance(getX(), getY(), getBallX(), getBallY()); double ballX = getBallX();double myX = getX();double targetX=ballX;double targetY=0;if ( (getAttack()>0 && myX>ballX+Radius) || (getAttack()<0 && myX<="" bdsfid="292" p="">{if(getY()>getBallY()) targetY=0;else targetY=getCourtHeight();Shoot(targetX, targetY);}}}//预测防守void ForecastGuard(){double x = getAttack() > 0 ? getBallX()/2 :getCourtWidth()-(getCourtWidth()-getBallX())/2;double y = getBallY();for(int i=0; i<50; i++){double nextX, nextY;Next(i, &nextX, &nextY);if((getAttack()>0&&nextX<=x) || (getAttack()<0&&nextX>=x)){y = nextY;break;}}//将y坐标限制在球门的范围内y = MIN(getCourtHeight() / 2 + getGoalWidth() / 2, y);y = MAX(getCourtHeight() / 2 - getGoalWidth() / 2, y);setMoveTo(x, y);}void myGuard(){double x = getAttack()>0 ? getBallX()/2 :getCourtWidth()-(getCourtWidth()-getBallX())/2;double y = getBallY();y = MIN(getCourtHeight()/2+getGoalWidth()/2, y);y = MAX(getCourtHeight()/2-getGoalWidth()/2, y);setMoveTo(x, y);}//全力防守void GoAllOutGuard(){double x = getAttack()>0 ? getBallX()/2 :getCourtWidth()-(getCourtWidth()-getBallX())/2;double y = getBallY();y = MIN(getCourtHeight()/2+getGoalWidth()/2+getRadius()*2*2, y);y = MAX(getCourtHeight()/2-getGoalWidth()/2-getRadius()*2*2, y);setMoveTo(x, y);}//防守反击void Guard(){double Radius = getBallRadius()*2 + getRadius()*2;double Distance = distance(getX(), getY(), getBallX(),getBallY()); if(Distance>Radius*10) myGuard();else{GoAllOutGuard();}if(!AzimuthDanger()){ShootAttack();return;} //方位安全时攻击if(isHitBall() && !AzimuthDanger() &&getBallVelocity()>getMoveVelocity()/4){ShootAttack();return;}if(BotBallBotDistance()){ShootGoal();} //如果自己离球的距离小于敌人则进攻}//判断进攻还是防守void AttackOrGuard(){if(AzimuthDanger() && getBallVelocity()>0){Guard();return;} if(JudgeDanger() &&getBallVelocity()>getMaxMoveVelocity()/2){Guard();return;} ShootAttack();}//进攻门前争球void GuardConfrontEachOther(){double Radius = getRadius()+getBallRadius()/2;double xx=getAttack()>0 ? Radius : getCourtWidth()-Radius;double MaxY = getCourtHeight() / 2 + getGoalWidth() / 2 + getRadius()*4;double MinY = getCourtHeight() / 2 - getGoalWidth() / 2 - getRadius()*4;if(getBallVelocity()>getMaxMoveVelocity()/2){if (getAttack()>0 && getX()MaxY || getY()<="">setMoveToward(getBallX(), getBallY(),getMaxMoveVelocity());}if(getAttack()<0 && getX()>getCourtWidth()-xx && (getY()>MaxY || getY()<miny))< bdsfid="378" p=""></miny))<> {setMoveToward(getBallX(), getBallY(),getMaxMoveVelocity());}}}void Text(char* tt,int color){struct TextView text;text.showTime=1;text.color=color;text.text=tt;text.size=40;double len = text.size*3.2;text.x=getX()-len;text.y=getY()-getRadius()*2;addTextView(&text);}void drawLine(double dx,double dy,double endx,double endy){struct LineView view;view.beginX=dx;view.beginY=dy;view.endX=endx;view.endY=endy;view.color=-256;view.showTime=1;addLineView(&view);}void line(){double MDistance = distance(getX(), getY(), getBallX(),getBallY());double DDistance = distance(getBotX(), getBotY(), getBallX(), getBallY());double MDDistance = distance(getBotX(), getBotY(), getX(), getY());if(MDistance>DDistance)drawLine(getBotX(),getBotY(),getB allX(), getBallY());else drawLine(getX(),getY(),getBallX(),getBallY());if(MDistance==DDistance)drawLine(getX(),getY(),getBotX(),getBotY());}//组合策略void startGame(){double starttime=getTime();double bgj=0; //被进攻次数double gj=0; //进攻次数char* tt="";int color=-1;while(1){double timejg=getTime()-starttime;if(gj-bgj>10) //对方属于防守型机器人攻击数大于被攻击数超过10次{tt="ShootGoal";color=-256;double bx=getBallX();//球在对方场地进攻if ( (getAttack()>0 && bx>getCourtWidth()/2) || (getAttack()<0 && bx<="" 2)="" bdsfid="436" p=""> {ShootGoal();tt="ShootGoal";color=-256;}//球在自己场地同时在滚动防守else if(getBallVelocity()>getMaxMoveVelocity()/5) {Guard(); tt="Guard";color=-1;}if(getBallVelocity()}//球被反弹出去后进攻if( (getAttack()>0 && getBallX()>getCourtWidth()*2/5) || (getAttack()<0 && getBallX()<="" 5)="" bdsfid="445" p=""> {if(!JudgeDanger()){ShootGoal();tt="ShootGoal";color=-256;} } //足球临近球门全力防守if((getAttack()>0 && getBallX()getCourtWidth()*3/5)){GoAllOutGuard();tt="GoAllOutGuard";color=-1;}//球在对方场地全力进攻if(getAttack()>0 && getBallX()>getCourtWidth()*3/5) {ShootGoal();tt="ShootGoal";color=-256;}else if(getAttack()<0 && getBallX()//强力防守危险时刻if( (getAttack()>0 && getBallX()getCourtWidth()-getBallRadius()*4) ){double x = getAttack() > 0 ? getRadius() :getCourtWidth()-getRadius();setMoveTo(x, getBallY());tt="GuardDanger";color=-1;GuardConfrontEachOther();}if(getBallVelocity()if(BotBallBotDistance()){ShootGoal();tt="ShootGoal";color=-256 ;} //如果自己离球的距离小于敌人则进攻if((!AzimuthDanger()&& !JudgeDanger())){ShootAttack();tt="ShootAttack";color =-256;} //反击if(getBallVelocity()==0){ShootGoal();tt="ShootGoal";color=-256 ;}if(timejg<5){ForecastGuard();tt="ForecastGuard";color=-256;}Owngoal(); //防止乌龙if(getTime()%2==0){line();Text(tt,color);}execute();if((int)timejg%10==0) //判断进攻和防守的次数{double bx=getBallX();if(getAttack()>0 && bx>getCourtWidth()/2) gj++; else if(getAttack()<0 && bx<="" p="">else bgj++;}}}int main(void) {startGame(); }。
机器人足球设计

void Defender_Right(Environment *env); void Defend1_Right(Environment *env); void Defend2_Right(Environment *env); void Defend_Right_py(Environment *env); 右队防守策略。入口参数:球员指针,环境参量。
机器人足球仿真比赛 课程设计
组 别:A 组 自动化 0409 班 组 员:程钊 012004014613
郝洵 012004014603 潘越 012004014604 王立 012004014626 指导老师:彭刚 提交时间:2005 年 11 月 13 日
机器人足球仿真课程设计
目
录
1. 需求分析
第9页
4.4 程序流程
机器人足球仿真课程设计
第 10 页
机器人足球仿真课程设计
4.5 函数说明 基本动作 void PredictBall ( Environment *env ); 预测球的位置,单步预测,运用微量调节。入口参数:环境参量。
void Velocity ( Robot *robot, double vl, double vr ); 将响应产生的机器人速度写入系统参量中,即引发机器人运动。入口参数:机器人 指针,左轮速度,右轮速度。
新加入的策略 void Kick( Environment *env, Robot *robot, double aim_angle ); 基本动作,绕到球后方,带球运动到对方球场。入口参数:环境参量,球员指针, 目标角度。
足球机器人教程4
四、比赛规则
• 见附件。
比赛演示
• 演示比赛……
• 传中射门… • 门前盘带…
五、方法与模式举例
• 1.信息获取与存储
信息获取、积累、预测
• 信息获取:感觉、查询、解析。 • 信息积累:保存必要的信息。
• 信息预测:①非常重要、困难;②空间大, 要有针对性;
球的位置预测
• • • • 考虑因素: 速度衰减(建立速度正常衰减模型) 边界反弹与衰减(建立边界反弹模型) 队员干扰(建立对手干扰模型)
• 设计模型2问题: • 世界模型单一; • 规则的使用不连续;
前锋
后卫
守门员
足球机器人系统四层决策推理模型示意图
•设计模型3:
队形确定 及 队形变换 队形
队形1 队形m
既定队形
...
环境感知模型 角色集1 传感器信息融合 信息预处理 特征状态提取 角色1
...
角色分配 及 角色转换
角色集m
• 5。完成!
Strategy (…) 函数
• • • • • • • • • • • • • void Strategy ( Environment *env ) { switch (env->gameState) { case 0: MoonFollowOpponent ( &env->home [1], &env->opponent [2] ); MoonFollowOpponent ( &env->home [2], &env->opponent [3] ); MoonFollowOpponent ( &env->home [3], &env->opponent [4] ); MoonAttack ( &env->home [4], env ); Goalie ( &env->home [0], env ); break; case FREE_BALL:
单片机机器人实现足球比赛
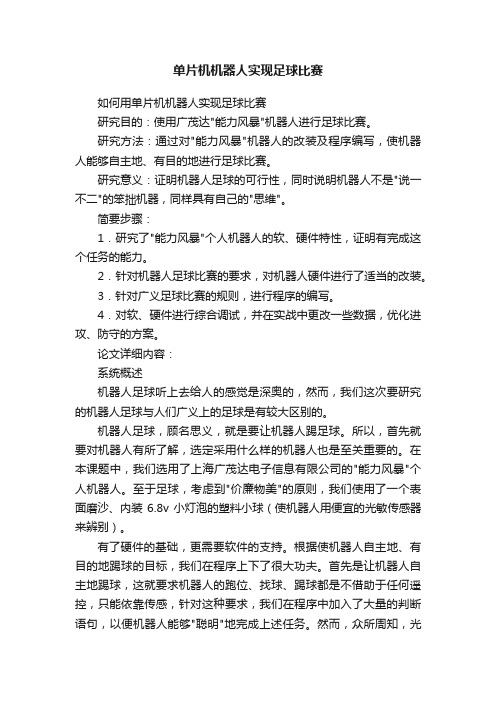
单片机机器人实现足球比赛如何用单片机机器人实现足球比赛研究目的:使用广茂达"能力风暴"机器人进行足球比赛。
研究方法:通过对"能力风暴"机器人的改装及程序编写,使机器人能够自主地、有目的地进行足球比赛。
研究意义:证明机器人足球的可行性,同时说明机器人不是"说一不二"的笨拙机器,同样具有自己的"思维"。
简要步骤:1.研究了"能力风暴"个人机器人的软、硬件特性,证明有完成这个任务的能力。
2.针对机器人足球比赛的要求,对机器人硬件进行了适当的改装。
3.针对广义足球比赛的规则,进行程序的编写。
4.对软、硬件进行综合调试,并在实战中更改一些数据,优化进攻、防守的方案。
论文详细内容:系统概述机器人足球听上去给人的感觉是深奥的,然而,我们这次要研究的机器人足球与人们广义上的足球是有较大区别的。
机器人足球,顾名思义,就是要让机器人踢足球。
所以,首先就要对机器人有所了解,选定采用什么样的机器人也是至关重要的。
在本课题中,我们选用了上海广茂达电子信息有限公司的"能力风暴"个人机器人。
至于足球,考虑到"价廉物美"的原则,我们使用了一个表面磨沙、内装6.8v小灯泡的塑料小球(使机器人用便宜的光敏传感器来辨别)。
有了硬件的基础,更需要软件的支持。
根据使机器人自主地、有目的地踢球的目标,我们在程序上下了很大功夫。
首先是让机器人自主地踢球,这就要求机器人的跑位、找球、踢球都是不借助于任何遥控,只能依靠传感,针对这种要求,我们在程序中加入了大量的判断语句,以便机器人能够"聪明"地完成上述任务。
然而,众所周知,光会跑位、找球、踢球的机器人是远远不够了,还必须不让机器人"受贿",将球送入自家大门,这就给机器人的程序编写增加了许多"麻烦",需要对自己场上的位置、目前的运动方向等进行辨认,并对机器人运动状态进行必要的调整。
2020年高中机器人足球项目测试练习题精编版
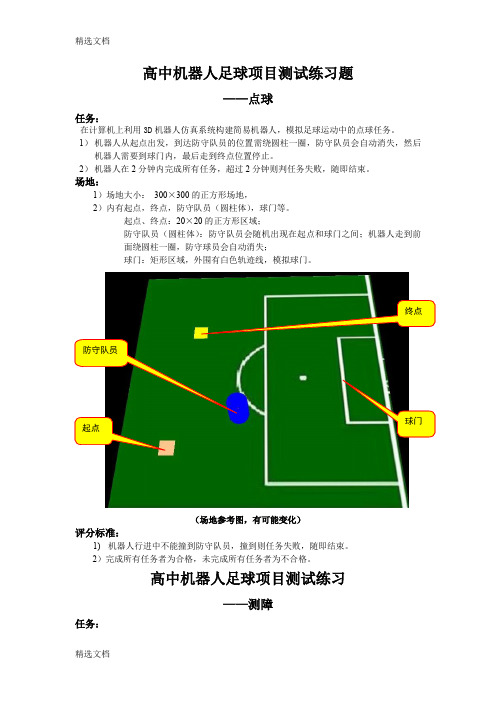
高中机器人足球项目测试练习题——点球任务:在计算机上利用3D 机器人仿真系统构建简易机器人,模拟足球运动中的点球任务。
1) 机器人从起点出发,到达防守队员的位置需绕圆柱一圈,防守队员会自动消失,然后机器人需要到球门内,最后走到终点位置停止。
2) 机器人在2分钟内完成所有任务,超过2分钟则判任务失败,随即结束。
场地:1)场地大小: 300×300的正方形场地, 2)内有起点,终点,防守队员(圆柱体),球门等。
起点、终点:20×20的正方形区域;防守队员(圆柱体):防守队员会随机出现在起点和球门之间;机器人走到前面绕圆柱一圈,防守球员会自动消失;球门:矩形区域,外围有白色轨迹线,模拟球门。
(场地参考图,有可能变化)评分标准:1) 机器人行进中不能撞到防守队员,撞到则任务失败,随即结束。
2)完成所有任务者为合格,未完成所有任务者为不合格。
高中机器人足球项目测试练习——测障任务:在计算机上利用3D 机器人仿真系统构建简易机器人,模拟机器人在场地中测障的任务。
1) 机器人从起点出发,走到固定障碍物所在位置,并绕过固定障碍物, 继续走到终点位置停止。
2) 机器人需在2分钟内完成所有任务,超过2分钟则任务失败。
场地:1) 场地大小:300×300的正方形场地。
2) 内有起点,固定障碍物(平板),终点等。
起点、终点:20×20的正方形区域。
固定障碍物(平板):位置固定不变的平板。
(场地参考图,有可能变化)评分:2)3) 机器人行进中不能撞到固定障碍物,否则判任务失败,随即结束。
4) 完成所有任务者为合格,未完成所有任务者为不合格。
起点 终点。
1.简答题以机器人踢足球为例利用人工智能原理叙述其踢球的过程
1.简答题以机器人踢足球为例利用人工智能原理叙述其踢球的过程1)关于机器人足球的“即时”特点22个人,再加上一个足球,场上一共有23个物体在同时运动。
我们不可能说机器人足球和五子棋一样,先一个人动,其他人站着,第一个动完再第二个人动。
.。
这样不是在踢球,而是在表演节目。
如果当年《星际争霸》这样的即时战略游戏,当人全部部署好之后,按一个re ad y键通知计算机,然后计算机慢慢悠悠测挨个处理它控制的坦克,那还有什么乐趣。
有人肯能会说可以用多线程(我事先申明,我对多线程的了解,仅限于几个简单的例程,所以一下的叙述可能有不对的地方)。
没错,多线程确实可以同步处理,并且对于足球这样的游戏,场上人员是确定的(不考虑被红牌罚下的),用23个线程来控制人和球,似乎也没什么不妥()。
但是如果是《星际》,造一个坦克就要新建一个进程,打死一个大兵就要销毁一个进程。
.。
好像这样开销比较大。
更何况计算机如果造出100架坦克,外加100个大兵,消耗的资源将相当可观。
虽然我不知道《星际》是如何实现即时战略的,但我想即使是用多线程,也肯定有专门的算法对其进行优化。
用得着这么复杂么?我们再仔细分析一下即时制跟回合制之间的关系,会发现两者其实没有本质的区别,更准确的说,回合制其实是即时制的一个特例而已!我做五子棋的时候,为了让人和计算机同步,设置了一些标志。
当人下过棋后,将标志复位,计算机才可以下棋。
它下过一次后将标志置位,就不能继续下了,等待人下棋。
如果我们把这些标志取消,那么计算机就会根据当前棋盘情况自顾自的下棋,你赶得上它的节奏你可能会赢,赶不上的话,就等着输吧!这样五子棋也就成了一个即时战略的游戏了。
所以我认为,对于机器人足球,只需要轮循计算机控制的所有球员,让每个球员针对场上情况作出最正确的响应就行了。
计算机的速度非常快,虽然是轮循,但几乎不会察觉出其中的先后次序,给人的感觉就是在同时进行。
其实操作系统的多线程,也是这样实现的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018年6月4日
成绩:
教
师
评
语
一、实验目的及要求
1. 熟悉机器人仿真平台AI-RCJ的安装、组成
2. 掌握机器人仿真平台的系统参数设置。
3. 学会简单的机器人程序的设计与调试方法。
二、实验原理与内容
1. 机器人仿真平台AI-RCJ的安装
2. 机器人仿真平台的系统参数设置。
3. 简单的机器人程序的设计。
三、实验软硬件环境
安装AI-RCJ机器人仿真平台的PC机
四、实验过程(实验步骤、记录、数据、分析)
实验指导教材:《AI-RCJ C语言教程教材》. 中鸣公司. 《AI-RCJ 图形化编程教材》. 中鸣公司. 实验步骤:
1、机器人仿真平台的系统参数设置练习。
新建一场比赛,通过观察不同参数值时的比赛,掌握各参数的作用。
2、编写一个简单行走的机器人。
机器人不断重复以下运动:先后退500个单位距离,再前进500个单位距离。
14、编写一个能够在自己球门前来回移动的机器人。
#include <airobot/c/SimpleRobot.h>
void run() {
double j,x,y,ballwidth;
j = getAttack();
if(j==1)
x = getCourtWidth();
else
x=0;
ballwidth = getGoalWidth();
y = getCourtCenterY();
doMoveTo(getCourtWidth(),0);
while(1){
doMoveTo(x,y + ballwidth);
doMoveTo(x,y - ballwidth);
}
}
15、编写一个能够进行简单进攻的机器人。
如图1所示,A点是机器人当前的位置,B点是足球当前的位置,P点是进攻球门中心。
要求机器人移动到C点后,一直往前推球以使其进入球门。
图1 机器人的简单进攻图
#include <airobot/c/SimpleRobot.h>
void run() {
double px,py;
px = getOpponentGoalCenterX();
py = getOpponentGoalCenterY();
double bx,by;
bx = getBallX();
by = getBallY();
double bc = getBallRadius() + getRadius() + 10;
double pbheading = heading(px,py,bx,by);
double cx = bx+cos(pbheading)*bc;
double cy = bx+sin(pbheading)*bc;
doMoveTo(cx,cy);
doTurnTo(toRadians(pbheading));
heading = -heading;
modifyInCourt(ballx, bally, getBallRadius());
}
}
}
五、测试/调试及实验结果分析
题3由“构建”→“编译文件”→“构建项目”成功如下:
“编译文件”成功如下:“构建项目”成功如下:
“新建比赛”机器人运行结果如下:。