SIMULINK仿真
SIMULINK仿真
后面的每一列对应每一个输入端口,矩阵的第一行表示某 一时刻各输入端口的输入状态。另外,也可以把矩阵分开 来表示,即MATLAB默认的表示方法[t,u],其中t是一维 时间列向量,表示仿真时间,u是和t长度相等的n维列向 量(n表示输入端口的数量),表示状态值。例如,在命 令窗口中定义t和u:
条件执行子系统分为
1.使能子系统
使能子系统表示子系统在由控制信号控制时,控制信号由 负变正时子系统开始执行,直到控制信号再次变为负时结 束。控制信号可以是标量也可以是向量。
建立使能子系统的方法是:打开Simulink模块库中的Ports & Subsystems模块库,将Enable模块复制到子系统模型 中,则系统的图标发生了变化。
阵、结构和包含时间的结构3种选择。“Limit data points to last”用来限定保存到工作空间中 的数据的最大长度。 输出选项(Output options)有: ① Refine output(细化输出) ② Produce additional output(产生附加输出) ③ Produce specified output only(仅在指定 的时刻产生输出)
4.1 初识Simulink—— 一个简单的仿 真实例
在MATLAB的命令窗口输入Simulink,或单击MATLAB主 窗口工具栏上的“Simulink”命令按钮即可启动Simulink。 Simulink启动后会显示如图4.1所示的Simulink模块库浏览 器(Simulink Library Browser)窗口。
U (s)
Kp
Ki s
Kd s
Simulink仿真PPT课件
Simulink仿真
第7章 Simulink仿真
第7章 Simulink仿真
本章要点 Simulink系统的基本模块 仿真模型的编辑 仿真参数的设置 SimPowerSystems工具箱及实例
教学时数 2学时
Simulink仿真
第7章 Simulink仿真
Simulink是MATLAB最重要的组件之一,它向用户提供一 个动态系统建模、仿真和综合分析的集成环境。
一、模块的编辑处理
1.模块的操作 (1)添加模块
当要把一个模块添加到模型中,先在Simulink模块库中 找到它,然后直接将这个模块拖入模型窗口中即可。 (2)选取模块 当模块已经位于模型窗口中时,只要用鼠标在模块上 单击就可以选中该模块,这时模块的四角上出现一些 黑色的小方块,这些小方块就是该模块的关键点,拖 动这些黑色小方块可以改变模块的大小。
2.模块间连线的调整 用鼠标单击连线,可以选中该连线。这时会看到线上的一些黑色小 方块,这些是连线的关键点。用鼠标按住关键点,拖动即可以改 变连线的方向。
3.连线的分支 仿真时经常会碰到需要把信号输送到不同的接收端的情况,这时 就需要分支结构的连线。可以先连好一条线,然后把鼠标移到支 线的起点位置,先按下〈Ctrl〉键,然后按住鼠标,将连线拖到 目标模块,松开鼠标和〈CtrSl〉imuli键nk仿即真 可。
仿真更为精细。它提供的许多模块更接近实际,为用户摆脱理想 化假设的无奈开辟了途径。
模型内码更容易向DSP,FPGA等硬件移植。
Simulink仿真
第7章 Simulink仿真
7.1 认识Simulink
Simulink 是MATLAB环境下对动态系统进行建模、 仿真和分析的一个软件包。该系统的两个主要功 能就是Simu(仿真)和Link(连接)。 一、Simulink的启动和退出 1.Simulink的启动
simulink仿真
Neural Network Blockset:神经网络工具箱;
Simulink Extras:补充Simulink公共模块库; Stateflow:用来对复杂的事件驱动系统进行建模和仿真; Real-Time Workshop (简称RTW):可以直接将simulink模型框图和 Stateflow的状态图转换成高效优化的程序代码。
将其输入写入工作空间 X-Y示波器模块
16
5、 Sources(信号源模块组) 及其用途
18个基本模块,包 括模型及子系统输入 与信号发生器两种。 其子模块组的名称和 用途见表3-5。
17
表3-5 信号源模块组子模块的名称及用途
模 块 名 称
Chirp Signal Clock Constant Digital Clock From Workspace From File Ground In1 Pulse Generator
工具栏区:含4个按钮: 是新建与打开按钮, 是将模 块放在桌面最上层按钮,Find是用来查找模块库中的模块按
钮。
文字说明区:对所选模块的文字说明; 模块库区:含模块库及其相应的模块组; 状态栏区:即最下方显示Ready区,用来显示浏览器状态。
4
二、基本模块库的分类及其用途
SIMULINK 有13类基本模块库,分别为: Continuous(连续模块组)、 Discontinuities(非连续模块组)、 Discrete(离散模块组)、 Look-Utions(数学运算模块组)、 Model Verification(模型检验模块组)、
模
块
用
途
Band-Limited White Noise 带宽限幅白噪声模块
线性调频信号模块(频率随时间线性增加的 正弦信号),可用于非线性系统谱分析 在每一仿真步输出当前仿真时间(连续时间) 输出与时间无关的实数或复数 仅在指定的采样间隔内输出仿真时间,在 其它时间输出保持前一次值不变(离散时间) 从MATLAB工作空间中读取数据 从一个指定的文件中读取数据并输出 接地模块 输入端口模块(同端口与子系统模块中In1) 产生固定频率脉冲序列
simulink热仿真
simulink热仿真摘要:一、Simulink 简介1.Simulink 的定义2.Simulink 的应用领域二、Simulink 热仿真1.热仿真的概念2.Simulink 热仿真的特点3.Simulink 热仿真的应用场景三、Simulink 热仿真的基本步骤1.准备模型2.添加热仿真模块3.配置模型参数4.运行仿真四、Simulink 热仿真的高级技巧1.模型优化2.结果分析3.参数调整五、Simulink 热仿真的实际应用案例1.案例介绍2.案例实施过程3.案例结果分析六、总结1.Simulink 热仿真的优势2.Simulink 热仿真的发展前景正文:一、Simulink 简介Simulink 是由美国MathWorks 公司开发的一款用于模型构建、仿真和分析的软件。
它采用图形化用户界面,用户可以通过拖拽组件来构建模型,然后对模型进行仿真和分析。
Simulink 广泛应用于各种领域,如控制系统、信号处理、通信等。
二、Simulink 热仿真1.热仿真的概念热仿真,顾名思义,是指对热现象进行仿真的过程。
在工程领域,热仿真常常用于分析物体在温度变化下的热传导、热膨胀等现象。
通过热仿真,可以预测设备在不同温度条件下的性能,为产品设计提供依据。
2.Simulink 热仿真的特点Simulink 热仿真具有以下特点:(1)丰富的模块库:Simulink 提供了丰富的热仿真模块,用户可以根据需要选择合适的模块进行模型构建。
(2)图形化界面:Simulink 采用图形化界面,使得模型构建和仿真过程更加直观。
(3)强大的仿真功能:Simulink 热仿真可以对复杂的模型进行高效、精确的仿真。
3.Simulink 热仿真的应用场景Simulink 热仿真主要应用于以下场景:(1)电子设备的热分析:分析电子设备在不同工作条件下的温度分布,以保证设备的可靠性和稳定性。
(2)机械设备的热分析:分析机械设备在高温或低温条件下的热膨胀、热变形等问题。
simulink仿真开环传递函数
simulink仿真开环传递函数
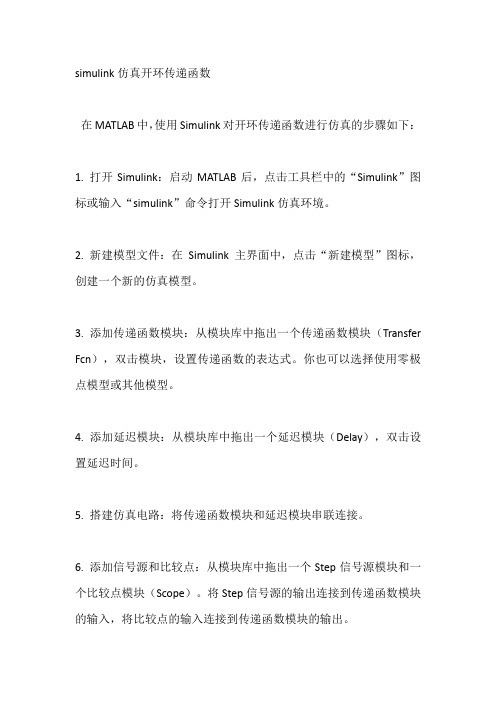
在MATLAB中,使用Simulink对开环传递函数进行仿真的步骤如下:
1. 打开Simulink:启动MATLAB后,点击工具栏中的“Simulink”图标或输入“simulink”命令打开Simulink仿真环境。
2. 新建模型文件:在Simulink主界面中,点击“新建模型”图标,创建一个新的仿真模型。
3. 添加传递函数模块:从模块库中拖出一个传递函数模块(Transfer Fcn),双击模块,设置传递函数的表达式。
你也可以选择使用零极点模型或其他模型。
4. 添加延迟模块:从模块库中拖出一个延迟模块(Delay),双击设置延迟时间。
5. 搭建仿真电路:将传递函数模块和延迟模块串联连接。
6. 添加信号源和比较点:从模块库中拖出一个Step信号源模块和一个比较点模块(Scope)。
将Step信号源的输出连接到传递函数模块的输入,将比较点的输入连接到传递函数模块的输出。
7. 设置负反馈:根据需要,添加一个负反馈模块(Feedback),将其连接到比较点和传递函数模块之间。
8. 添加输出模块:根据需要,添加一个Simout模块或示波器模块(Scope),用于观察输出信号。
9. 设置仿真时间:点击仿真菜单,设置仿真时间。
10. 开始仿真:点击Simulink工具栏中的“运行”按钮,或按快捷键“Ctrl+R”启动仿真。
11. 分析结果:仿真结束后,查看输出模块的结果,分析系统的性能。
通过以上步骤,你可以在MATLAB中使用Simulink对开环传递函数进行仿真。
在实际应用中,根据需要可以调整模块参数和仿真时间,以满足不同场景下的仿真需求。
simulink仿真实验报告
simulink仿真实验报告Simulink仿真实验报告一、引言Simulink是一种基于模型的设计和仿真工具,广泛应用于各领域的工程设计和研究中。
本次实验将利用Simulink进行系统仿真实验,通过搭建模型、参数调整、仿真运行等过程,验证系统设计的正确性和有效性。
二、实验目的本实验旨在帮助学生掌握Simulink的基本使用方法,了解系统仿真的过程和注意事项。
通过本实验,学生将能够:1. 熟悉Simulink的界面和基本操作;2. 理解和掌握模型构建的基本原理和方法;3. 学会调整系统参数、运行仿真和分析仿真结果。
三、实验内容本实验分为以下几个步骤:1. 绘制系统模型:根据实验要求,利用Simulink绘制出所需的系统模型,包括输入、输出、控制器、传感器等。
2. 参数设置:针对所绘制的系统模型,根据实验要求设置系统的参数,例如增益、阻尼系数等。
3. 仿真运行:通过Simulink的仿真功能,对所构建的系统模型进行仿真运行。
4. 仿真结果分析:根据仿真结果,分析系统的动态性能、稳态性能等指标,并与理论值进行对比。
四、实验结果与分析根据实验要求,我们绘制了一个负反馈控制系统的模型,并设置了相应的参数。
通过Simulink的仿真功能,我们进行了仿真运行,并获得了仿真结果。
仿真结果显示,系统经过调整参数后,得到了较好的控制效果。
输出信号的稳态误差较小,并且在过渡过程中没有发生明显的振荡或超调现象。
通过与理论值进行对比,我们验证了系统的稳态稳定性和动态响应性能较为理想。
五、实验总结通过本次实验,我们掌握了使用Simulink进行系统仿真的基本方法和技巧。
了解了系统模型构建的基本原理,并学会了参数调整和仿真结果分析的方法。
这对于我们今后的工程设计和研究具有重要的意义。
六、参考文献1. 《Simulink使用手册》,XXX出版社,20XX年。
2. XXX,XXX,XXX等.《系统仿真与建模实践教程》. 北京:XXX出版社,20XX年。
simulink仿真流程

simulink仿真流程标题,深入了解Simulink仿真流程。
Simulink是一种用于建模、仿真和分析动态系统的工具,它可以帮助工程师们更好地理解和设计复杂的控制系统。
在本文中,我们将深入探讨Simulink的仿真流程,以帮助读者更好地了解如何使用Simulink进行系统仿真。
Simulink仿真流程可以分为以下几个步骤:1. 模型建立,首先,我们需要在Simulink中建立系统的模型。
这可以通过拖放各种组件来实现,包括传感器、执行器、控制器等。
这些组件可以通过连接线连接起来,以构建系统的整体模型。
2. 参数设置,在建立模型后,我们需要设置各个组件的参数,包括传感器的灵敏度、执行器的动态响应等。
这些参数设置将直接影响系统的仿真结果。
3. 信号输入,接下来,我们需要确定系统的输入信号,这可以是一个预先定义的信号,也可以是一个外部输入。
这些输入信号将作为系统的激励,驱动系统进行仿真。
4. 仿真运行,一切就绪后,我们可以开始运行仿真。
Simulink将根据模型和参数设置,以及输入信号,模拟系统的动态行为,并输出相应的仿真结果。
5. 结果分析,最后,我们需要对仿真结果进行分析。
这包括系统的响应曲线、稳定性分析、频域特性等。
通过对仿真结果的分析,我们可以评估系统的性能,并进行必要的调整和优化。
总的来说,Simulink的仿真流程涉及模型建立、参数设置、信号输入、仿真运行和结果分析等多个环节。
通过深入了解Simulink的仿真流程,我们可以更好地利用这一工具来进行系统建模和分析,从而更好地理解和设计复杂的控制系统。
simulink仿真简单实例
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
第4章 SIMULINK仿真
• (9)Signal Attributes(信号属性模块库)和Signal Attributes(信号属性模块库) Routing(信号路由模块库) Routing(信号路由模块库)
• • • • • • • • • • • • • • • 这两个模块库主要是由描述信号系统的模块构成,其中主要模块有: Data Type Conversion (数据类型转换器) IC(初始状态); Probe(探测器); Width(带宽); Bus Creator(总线生成器); Bus Selector(总线选择器); Data Store Memory(数据记忆存储); Data Store Read(数据读存储); Data Store Write(数据写存储); From(导入); Goto(传出); Goto Tag Visibility(传出标记符可视性); Multiport Switch (多路选择开关); Mux(混合)
• (7)Model Verification(模型辨识模块库)和ModelVerification(模型辨识模块库) ModelUtilities(扩展模型模块库) Wide Utilities(扩展模型模块库) • 这两个模块库由描述模型辨识的和扩展模型模块构成,其 中主要模块有: • Assertion(确认); • Check Discrete Gradient(检查离散梯度); • Check Dynamic Range(检查动态系统范围); • Check Dynamic Lower Bound(检查动态系统低段范围) • Check Static Range(检查静态系统范围); • Check Input Resolution (检查输入分辨率); • DocBlock(模块注释文本); • Model Info(模型信息); • Timed-Based Linearization(基于时间的线性化模型)
simulink热仿真

simulink热仿真摘要:1.Simulink 简介2.Simulink 热仿真的概念和原理3.Simulink 热仿真的应用领域4.Simulink 热仿真的优势和局限性5.Simulink 热仿真的未来发展趋势正文:一、Simulink 简介Simulink 是MathWorks 公司开发的一款与MATLAB 兼容的仿真环境,主要用于动态系统建模、仿真和分析。
通过Simulink,用户可以轻松地构建、模拟和测试复杂的动态系统,从而加速设计迭代过程,降低开发成本。
二、Simulink 热仿真的概念和原理Simulink 热仿真是指在Simulink 环境中进行的热力学系统建模和仿真。
热仿真主要包括热力学模型的构建、热传导过程的模拟以及热响应性能的分析。
Simulink 热仿真的原理主要基于MATLAB 的数值计算能力和Simulink 的图形化建模功能,通过将热力学系统的各个部分以图形化方式建模,再利用MATLAB 进行数值计算,从而实现对热力学系统的仿真。
三、Simulink 热仿真的应用领域Simulink 热仿真在多个领域具有广泛的应用,包括但不限于:1.航空航天:用于研究飞行器的热控制、热传导以及热膨胀等问题;2.汽车工程:用于分析发动机冷却系统、制动系统等的热性能;3.建筑节能:用于评估建筑物的热绝缘性能、热桥效应等;4.电子设备:用于分析电子设备的热设计、热散热等问题。
四、Simulink 热仿真的优势和局限性Simulink 热仿真的优势主要体现在以下几个方面:1.易于学习和使用:Simulink 具有直观的图形化界面,用户可以快速上手并进行建模;2.强大的计算能力:基于MATLAB 的数值计算能力,Simulink 可以处理复杂的数学模型和计算任务;3.高效的仿真速度:Simulink 利用高效的算法和技术,可以大幅缩短仿真时间,提高设计效率。
然而,Simulink 热仿真也存在一定的局限性,例如:1.对模型的精度和复杂度有一定要求;2.模型的参数调整和优化需要一定的经验。
simulink离散仿真简单实例

simulink离散仿真简单实例Simulink是MATLAB的一个工具箱,它提供了一个图形化界面,用于建立和模拟动态系统。
它使用块图的形式表示系统,其中每个块代表系统中的一个组件或功能单元。
这些块可以通过线连接在一起,以表示信号的流动。
通过配置块的参数和连接,可以建立一个完整的系统模型。
在Simulink中进行离散仿真时,时间被划分为离散的步长,系统在每个步长内的行为被模拟。
离散仿真可以用于分析系统在不同时间点的行为,例如系统的稳定性、响应时间等。
接下来,我们将通过一个简单的实例来展示Simulink离散仿真的过程。
假设我们要建立一个简单的温度控制系统,系统包括一个温度传感器、一个控制器和一个加热器。
温度传感器用于测量当前环境温度,控制器根据测量值调整加热器的功率。
在Simulink中创建一个新的模型。
在模型中,我们将使用三个块来表示系统的各个组件:一个输入块用于表示环境温度的输入信号,一个控制器块用于调整加热器的功率,一个输出块用于表示系统的输出信号。
接下来,我们需要配置每个块的参数和连接它们。
输入块可以配置为生成一个随机的环境温度信号,控制器块可以配置为根据测量值输出一个控制信号,输出块可以配置为显示系统的输出信号。
通过连接输入块、控制器块和输出块,我们可以建立一个完整的系统模型。
在配置完模型后,我们可以设置仿真参数。
例如,我们可以设置仿真的时间范围、步长等参数。
然后,我们可以运行仿真并观察系统的行为。
通过仿真结果,我们可以分析系统的稳定性、响应时间等性能指标。
通过这个简单的实例,我们可以看到Simulink离散仿真的基本过程。
首先,我们建立一个系统模型,然后配置各个组件的参数和连接它们。
最后,我们设置仿真参数并运行仿真来分析系统的行为。
Simulink离散仿真可以应用于各种实际问题的建模和分析。
例如,它可以用于分析控制系统的性能、优化电路设计、评估通信系统的可靠性等。
通过Simulink离散仿真,我们可以更好地理解和改善系统的行为。
Simulink仿真平台及通信模块简介

常见问题与解决方案
模块兼容性问题
在使用Simulink通信模块时,可能会遇 到模块兼容性问题。例如,某些模块可 能无法与其他模块正确连接或出现错误 。此时需要检查模块的兼容性和连接方 式,确保模块之间的正确连接。
发展
随着技术的不断进步和应用需求的不断增长,Simulink也在不断更新和扩展,支持更多的算法和工具箱,满足不 同领域的需求。
02
Simulink通信模块介绍
信号源模块
信号源模块
产生模拟或数字信号,作为通信系统的输入。
信号源分类
正弦波、方波、三角波等。
应用场景
用于测试和验证通信系统的性能。
参数设置
物理层协议
Simulink支持多种物理层协议, 如以太网协议、光纤通信协议等, 可以模拟不同协议下的信号传输 性能。
数据链路层协议
Simulink支持多种数据链路层协 议,如PPP协议、HDLC协议等, 可以模拟不同协议下的数据链路 层行为。
卫星通信系统仿真
卫星轨道和运动
Simulink支持多种卫星轨道和运动模型,如地球同步轨道、 太阳同步轨道等,可以模拟不同轨道和运动下的卫星信号 传输特性。
卫星信道建模
Simulink支持多种卫星信道模型,如自由空间传播信道、 大气衰减信道等,可以模拟不同环境下的卫星信号传播特 性。
卫星通信协议
Simulink支持多种卫星通信协议,如DVB-S2协议、 COFDM协议等,可以模拟不同协议下的卫星信号传输性 能。
物联网通信系统仿真
传感器网络建模
Simulink支持多种传感器网络模型,如无线传感器网络、有源传感器网络等,可以模拟不 同传感器网络下的信号传输特性。
simulink仿真实验报告
simulink仿真实验报告Simulink 仿真实验报告引言:Simulink 是一种常用的建模和仿真工具,它可以帮助工程师们在设计和开发过程中进行系统级建模和仿真。
本文将通过一个实际的仿真实验来展示 Simulink 的应用。
一、实验背景在现代工程领域中,系统的建模和仿真是非常重要的一步。
通过仿真实验,我们可以在实际制造之前对系统进行测试和优化,节省了时间和成本。
本实验的目标是使用 Simulink 对一个电机驱动系统进行建模和仿真,以验证其性能和稳定性。
二、实验步骤1. 系统建模在 Simulink 中,我们首先需要将电机驱动系统进行建模。
我们可以使用Simulink 提供的各种组件来构建系统模型,例如传感器、控制器、电机等。
在本实验中,我们将使用 PID 控制器来控制电机的转速。
2. 参数设置在建模过程中,我们需要设置各个组件的参数。
例如,我们需要设置 PID 控制器的比例、积分和微分系数,以及电机的转动惯量和阻尼系数等。
这些参数的设置将直接影响系统的性能。
3. 仿真运行在模型建立和参数设置完成后,我们可以进行仿真运行。
通过设置仿真时间和输入信号,我们可以观察系统在不同条件下的响应情况。
例如,我们可以通过改变输入信号的频率和幅度来测试系统的稳定性和鲁棒性。
4. 结果分析仿真运行完成后,我们可以分析仿真结果。
通过观察输出信号的波形和频谱,我们可以评估系统的性能和稳定性。
例如,我们可以计算系统的响应时间、超调量和稳态误差等指标,以评估系统的控制效果。
三、实验结果在本实验中,我们成功建立了一个电机驱动系统的 Simulink 模型,并进行了仿真运行。
通过观察仿真结果,我们发现系统在不同输入信号条件下的响应情况。
在一些情况下,系统的响应时间较短,稳态误差较小,表现出良好的控制效果。
然而,在一些极端情况下,系统可能出现超调或不稳定的现象,需要进一步优化参数和控制策略。
四、实验总结通过本次仿真实验,我们深入了解了 Simulink 的应用和优势。
simulink 仿真原理

simulink 仿真原理Simulink是一种用于建立、仿真和分析动态系统的工具,它基于块图的图形化建模和仿真环境。
Simulink中的模型由各种块组成,每个块代表系统中的一个组件或子系统。
通过连接块之间的信号流,可以建立系统的完整模型。
在Simulink中,系统的行为可以用已知的数学和物理原理描述。
通过在块间定义输入和输出之间的关系,可以建立数值模型。
仿真过程可以提供系统的响应和行为,并用于验证模型的正确性。
Simulink提供了多种模型库,包括数学操作、信号处理、控制系统、电力系统等领域。
用户可以根据需要选择适当的块来构建他们的模型。
此外,Simulink还提供了丰富的仿真参数和分析工具,使用户可以对系统进行深入的研究和优化。
使用Simulink进行仿真的过程通常包括以下步骤:1. 建立模型:选择适当的块,并将它们连接在一起,以形成系统模型。
2. 定义输入信号:指定模型的输入信号,可以是常数、波形或来自外部数据源。
3. 配置模型参数:设置块和模型的参数,例如采样时间、模拟时间、仿真器选项等。
4. 运行仿真:开始仿真过程,并观察系统的响应和行为。
5. 分析和优化:使用Simulink提供的工具进行结果分析和系统优化。
6. 生成代码:将模型生成可嵌入系统或实时硬件的代码。
7. 验证和验证:使用实际数据对生成的代码进行验证,并验证系统的正确性。
Simulink的应用广泛,可以用于开发控制系统、信号处理算法、通信系统等各种领域。
通过图形化建模和仿真环境,Simulink大大简化了系统开发和测试的过程,提高了开发效率和质量。
同时,Simulink也与MATLAB密切集成,可以轻松地进行数据分析和可视化。
(入门)超经典_simulink仿真

学习建议及资源推荐
学习建议
建议初学者从基础概念入手,逐步掌握建模与仿真方法;同时,多动手实践,通过案例分析加深对知识的理解。
资源推荐
推荐参考书籍《MATLAB/Simulink系统仿真》、在线课程《Simulink从入门到精通》以及MATLAB官网的教程 和案例库等学习资源。
THANK YOU
感谢各位观看
自适应滤波算法
根据输入信号的统计特性自适应地调 整滤波器参数,用于信号预测、回声 消除等应用。
基于Simulink的数字信号处理实例分析
数字滤波器设计实例
通过Simulink搭建数字滤波器模型,包括滤波器系数设计和滤波器结构实现,对输入 信号进行滤波处理并观察输出结果。
FFT算法实现实例
利用Simulink中的FFT模块实现快速傅里叶变换算法,对输入信号进行频谱分析并显示 频谱图。
启动方法
在MATLAB命令窗口中输入 “simulink”命令,或点击MATLAB 工具栏中的Simulink图标,即可启动 Simulink。
模型创建与保存
创建新模型
在Simulink启动后,选择“File”菜 单中的“New”选项,然后选择 “Model”即可创建一个新的 Simulink模型。
离散时间系统
对离散时间信号进行处理的系统,可以是线性的或非线性的,时变 的或时不变的。
常见数字信号处理算法介绍
离散傅里叶变换(DFT)
将有限长序列分解为不同频率的正弦 波和余弦波之和,用于信号分析和处 理。
快速傅里叶变换(FFT)
是DFT的高效算法,用于快速计算序 列的频谱。
数字滤波器设计
根据滤波器的性能指标,设计数字滤 波器的系数和结构,用于信号的滤波 和去噪。
simulink建模及动态仿真的一些实验步骤

simulink建模及动态仿真的一些实验步骤Simulink是MATLAB中的一种可视化仿真工具,可以用于动态系统建模、仿真和分析。
以下是一些Simulink建模及动态仿真的实验步骤:启动Simulink:首先,需要打开MATLAB,然后在MATLAB 的命令窗口中输入“simulink”命令,或者点击工具栏中的Simulink 图标来启动Simulink。
新建模型:在Simulink的启动界面中,可以选择“Blank Model”来新建一个空白的模型。
也可以选择其他预设的模型模板来开始建模。
构建系统模型:在新建的模型窗口中,可以通过从Simulink 的模块库中拖拽模块到模型窗口中来构建系统模型。
模块库中包含了各种类型的模块,如源模块、接收模块、处理模块等。
将这些模块按照系统的结构和功能连接起来,形成一个完整的系统模型。
设置模块参数:对于模型中的每个模块,都可以双击打开其参数设置对话框,设置其参数和初始条件。
这些参数和初始条件将决定模块在仿真中的行为。
设置仿真参数:在模型窗口的工具栏中,可以点击“Simulation”->“Model Configuration Parameters”来打开仿真参数设置对话框。
在这个对话框中,可以设置仿真的起始和结束时间、仿真步长、求解器类型等参数。
开始仿真:完成以上步骤后,可以点击模型窗口工具栏中的“Run”按钮来开始仿真。
在仿真过程中,可以实时观察模型中各个模块的状态和输出。
分析结果:仿真结束后,可以使用Simulink提供的各种分析工具来分析仿真结果。
例如,可以使用示波器模块来显示仿真过程中某个模块的输出波形,也可以使用MATLAB的工作空间来查看和处理仿真数据。
以上步骤是一个基本的Simulink建模和动态仿真的过程。
在实际使用中,可能还需要根据具体的需求和系统特点进行一些额外的设置和调整。
基于matlab simulink的控制系统仿真及应用

基于matlab simulink的控制系统仿真及应用Simulink是MATLAB的一个附加组件,它提供了一种可视化建模和仿真环境,主要用于控制系统、信号处理、通信系统等领域的建模和仿真。
以下是一个简单的基于Simulink的控制系统仿真的步骤:
1. 模型建立:首先,你需要使用Simulink库中的模块来构建你的控制系统模型。
这些模块包括输入、输出、控制算法等。
你可以直接从库中拖放模块到你的模型中,然后通过连接线将它们连接起来。
2. 参数设置:在连接模块后,你需要为每个模块设置适当的参数。
例如,对于传递函数模块,你需要输入分子和分母的系数。
3. 仿真设置:在完成模型和参数设置后,你需要设置仿真参数,例如仿真时间、步长等。
4. 运行仿真:最后,你可以运行仿真并查看结果。
Simulink提供了多种方式来查看结果,包括图形和表格。
在Simulink中,你可以使用许多内建的工具和函数来分析和优化你的控制系统。
例如,你可以使用MATLAB的控制系统工具箱中的函数来分析系统的稳定性、频率响应等。
总的来说,Simulink是一个强大的工具,可以用于设计和分析各种控制系统。
通过学习和掌握这个工具,你可以更有效地进行控制系统设计和仿真。
simulink仿真原理

simulink仿真原理Simulink仿真原理Simulink是一种基于模块化的多域仿真环境,它使用图形化界面和模块化建模方法,可以对各种系统进行仿真和建模。
Simulink的仿真原理是通过将系统建模为一个或多个模块,并通过连接这些模块来描述系统的行为和交互。
Simulink仿真原理的基础是信号流图。
在信号流图中,模块代表系统的组成部分,信号则代表模块之间的相互作用。
通过连接模块和传递信号,可以模拟系统的运行过程,并观察系统的行为和性能。
Simulink中的模块被称为块,每个块代表一个特定的功能或算法。
这些块可以是基本的数学运算、逻辑运算,也可以是复杂的控制算法或物理模型。
通过选择合适的块,并将它们连接在一起,可以构建出完整的系统模型。
Simulink中的信号可以是连续的,也可以是离散的。
连续信号可以表示系统的物理量,如电压、速度等;离散信号则表示系统的状态或事件,如开关状态、传感器触发等。
通过将连续信号和离散信号连接在一起,可以模拟出系统的实时行为。
Simulink仿真原理的关键之一是求解器。
求解器是Simulink用于计算模型输出的数值方法。
Simulink提供了多种求解器,可以根据系统的特点和仿真需求选择合适的求解器。
常用的求解器有Euler法、隐式法、变步长法等。
通过选择合适的求解器,可以保证系统模型的精度和稳定性。
Simulink仿真原理的另一个关键是仿真参数。
仿真参数是指控制仿真过程的各种设置,如仿真时间、步长、停止条件等。
通过调整这些参数,可以控制仿真的速度和精度,并满足不同仿真需求。
Simulink仿真原理的优势在于其图形化建模和直观的界面。
相比于传统的编程方法,Simulink可以更快速地建立系统模型,并对模型进行可视化调试和验证。
Simulink还支持多领域仿真,可以对多种物理系统、控制系统、通信系统等进行建模和仿真。
Simulink仿真原理是通过图形化建模和模块化设计,通过连接模块和传递信号来描述系统的行为和交互。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
块库,将Subsystem模块添加到模型编辑窗口中。双击Subsystem模 块打开一个Subsystem窗口,窗口中已经自动添加了一个输入模块和 输出模块(表示子系统的输入端口和输出端口)。将要组合的模块插 入到输入模块和输出模块中间,一个子系统就建好了。若双击该 Subsystem模块,则打开原来的子系统内部结构窗口。 2.通过已有的模块建立子系统
u'、u、y'和y经代数运算又产生y",据此可以建立系统模型并仿真。 (1)利用Simulink模块库中的基本模块建立系统模型
(2)设置系统仿真参数。 在模型编辑窗口的 Simulation stop time栏把仿 真的停止时间设置为5。 (3)仿真操作。
方法 2:利用传递函数模块建模。
对方程 y" + 1.5y' + 10y = 2u'(t) + 10u(t)两边取 Laplace 变换,得 s2Y(s) + 1.5sY(s) + 10Y(s) = 2sU(s) + 10U(s)
有:Time(时钟)、States(状态)、Output (输出端口)、Final state(最终状态)和 Signal logging(信号)。同载入数据的形式 一样,保存数据也有矩阵、结构和包含时间数 据的结构3种形式
Simulink仿真环境
(3)保存选项(Save options) 在保存选项栏中的“Format”下拉列表中有矩
4.1 初识Simulink—— 一个简单的仿 真实例
在MATLAB的命令窗口输入Simulink,或单击MATLAB主 窗口工具栏上的“Simulink”命令按钮即可启动Simulink。 Simulink启动后会显示如图4.1所示的Simulink模块库浏览 器(Simulink Library Browser)窗口。
经整理得传递函数:
G(s)
Y (s) U (s)
s2
2s 10 1.5s 10
方法 3:利用状态方程模块建模。 若令 x1 = y,x2 = y',那么微分方程 y" + 1.5y' + 10y = 2u'(t) + 10u(t)可写成:
x1 x2 x2 10x1 1.5x2 u y 10x1 2x2
U (s)
Kp
Ki s
Kd s
建立 PID 控制器的模型并建立子系统。
先建立PID控制器的模型
选中模型中所有模块,使用模型编辑窗口Edit菜单中 的Create Subsystem命令建立子系统,模型将被一个 Subsystem模块取代
4.4.2 子系统的条件执行
子系统的执行可以由输入信号来控制,用于控制子系统执 行的信号称为控制信号,而由控制信号控制的子系统称为 条件执行子系统。
1.模型元素
一个典型的Simulinnk模型包括以下3种元 素。
● 信号源(Source)
● 被模拟的系统模块 输入
系统
输出
● 信号输出(Sink)
2.仿真步骤
(1)建立系统仿真模型,包括添加模块、 设置模块参数、进行模块连接等操作。
(2)设置仿真参数。
(3)启动仿真并分析仿真结果。
t=(0:0.1:4)';
u=[sin(t),cos(t).*sin(t),exp(-2*t).*sin(t)];
Simulink仿真环境
② 包含时间数据的结构形式。结构变量包含若干个成员,对结构成员 的引用格式为:结构变量名.成员名。在结构中必须有成员:time和 signals。在time成员中包含一个列向量,表示仿真时间;在signals成 员中包含一个数组,数组中的每个元素对应一个输入端口,并且每个 元素必须包含一个名字同样不能改变的values成员,values成员也包 含一个列向量,对应于输入端口的输入数据。例如,对于上例,若改 为包含数据的结构输入,则命令格式如下:
模型建好后,将模型以模型文件的格式 (扩展名为.mdl)存盘。
Simulink仿真环境
(5)设置系统仿真参数。
(6)仿真操作。
4.2 仿真模型的建立
4.2.1 Simulink的基本模块 模块是构成系统仿真模型的基本单元。构建系
统仿真模型主要涉及Simulink模块的操作。 基本模块库 专业模块库
Simulink仿真环境
2.Data Import/Export类设置 ① 矩阵形式。MATLAB把矩阵的第一列默认为时间向量,
后面的每一列对应每一个输入端口,矩阵的第一行表示某 一时刻各输入端口的输入状态。另外,也可以把矩阵分开 来表示,即MATLAB默认的表示方法[t,u],其中t是一维 时间列向量,表示仿真时间,u是和t长度相等的n维列向 量(n表示输入端口的数量),表示状态值。例如,在命 令窗口中定义t和u:
写成状态 方程为 :
Du
式中,
A
0 10
11.5,B
0 1
,C
=
[10
2],D
=
0。
示波器
示波器属性对话框
示波器属性对话框
示波器纵坐标设置
4.4 子系统与封装
子系统把功能上有关的一些模块集中到一起保存,能够完成几个模块 的功能。
(3)把输出结果送到To Workspace模块,从而将结果直 接存入工作空间,然后用MATLAB命令画出该变量的变化 曲线。
【例4.2】利用Simulink仿真求
2 x3dx
首先打开一个模型编辑窗口,将所需0模块添加到模型中。
设置模块参数并连接各个模块组成仿真模型。
设置系统仿真停止时间为2s。单击模型编辑窗口中的Start simulation按钮或选择模型编辑窗口Simulation菜单中的Start 命令开始系统仿真。系统仿真结束后,显示模块Display,显 示仿真结果为4。
第4章 Simulink仿真环境
Simulink仿真环境
Simulink是一个以MATLAB为基础的软件包,用 于对动态系统进行建模和仿真。它使得MATLAB 的功能得到进一步扩展,它可以非常容易的实现 可视化建模,把理论研究和工程实践有机的结合 在一起。
【本章学习目标】 ● 熟悉Simulink的操作环境。 ● 掌握绘制系统模型的方法。 ● 掌握子系统模块的建立与封装技术。 ● 了解S函数的功能与设计方法。
条件执行子系统分为
1.使能子系统
使能子系统表示子系统在由控制信号控制时,控制信号由 负变正时子系统开始执行,直到控制信号再次变为负时结 束。控制信号可以是标量也可以是向量。
4.2.4 模块的参数和属性设置 1.模块的参数设置 2.模块的属性设置 ① Description:对该模块在模型中的用法进行说明。 ② Priority:规定该模块在模型中相对于其他模块执行的
优先顺序。 ③ Tag:用户为模块添加的文本格式的标记。 “Block Annotation”选项卡中指定在该模块的图标下显示
4.3.3 系统仿真实例 【例4.3】有初始状态为0的二阶微分方程
y" + 1.5y' + 4y = 2u'(t) + 4u(t),其中u(t)是单位阶跃函数,试建立系统 模型并仿真。
方法1:用微分/积分器直接构造求解微分方程的模型。 把原微分方程改写为
y" = 2u' (t) + 4u(t) − 1.5y' − 4y u经微分作用得u',y"经积分作用得y',y'再经积分模块作用就得y,而
Simulink仿真环境
4.3.2 仿真结果分析 为了观察仿真结果的变化轨迹可以采用3种方法。 (1)把输出结果送给Scope模块或者XY Graph模块。
Scope模块显示系统输出量对于仿真时间的变化曲线,XY Graph模块显示送到该模块上的两个信号中的一个对另一 个的变化关系。
(2)把仿真结果送到输出端口并作为返回变量,然后使 用MATLAB命令画出该变量的变化曲线。
阵、结构和包含时间的结构3种选择。“Limit data points to last”用来限定保存到工作空间中 的数据的最大长度。 输出选项(Output options)有: ① Refine output(细化输出) ② Produce additional output(产生附加输出) ③ Produce specified output only(仅在指定 的时刻产生输出)
模块的哪个参数。“Callbacks”选项卡中指定当对该模块 实施某种操作时需要执行的MATLAB命令或程序。
Simulink仿真环境
4.3.1 设置仿真参数 打开系统仿真模型,从模型编辑窗口的“Simulation”菜单中选择
“Configuration Parameters”命令,打开一个仿真参数对话框,在其中可以 设置仿真参数。在此对话框中,仿真参数设置被分为8类。 ● Solver类:用于设置仿真起始和停止时间,选择微分方程求解算法并为 其规定参数,以及选择某些输出选项。 ● Data Import/Export类:用于管理工作空间数据的导入和导出。 ● Optimization类:用于设置仿真优化模式。 ● Diagnostics类:用于设置在仿真过程中出现各类错误时发出警告的等级。 ● Hardware Implementation类:用于设置实现仿真的硬件。 ● Model Referencing类:用于设置参考模型。 ● Simulation Target类:用于设置仿真模型目标。 ● HDL Coder类:用于设置通过自动代码生成技术将设计算法生成HDL代 码的方法