实时控制系统的步进电机速度控制器设计
基于单片机的步进电机控制器设计
基于单片机的步进电机控制器设计步进电机是一种可实现精确控制和定位的电动机,广泛应用于机械和自动化领域。
为了更好地控制步进电机,可以设计一个基于单片机的步进电机控制器。
本文将从步进电机的基本原理、常见控制方式、单片机的选择、电路设计和程序编写等方面进行详细介绍,共计超过1200字。
第一部分:步进电机的基本原理步进电机主要由定子和转子组成,通过电磁原理可以实现精确控制和定位。
步进电机根据工作方式的不同分为全步进电机和半步进电机,全步进电机每次步进一个固定的角度,而半步进电机每次步进一个更小的角度。
第二部分:常见的步进电机控制方式步进电机的控制方式有多种,其中最常见的控制方式是脉冲方向控制和脉冲加减速控制。
脉冲方向控制方式通过给步进电机控制信号的脉冲数和方向来实现电机转动,脉冲加减速控制方式则通过改变脉冲的频率和加减速度来控制电机的转速和位置。
第三部分:单片机的选择在设计步进电机控制器时,需要选择适合的单片机来实现控制逻辑和信号的生成。
常见的单片机有51系列、AVR系列、ARM Cortex-M系列等。
选择单片机时需要考虑其运算速度、存储容量、IO口数量等因素,以满足步进电机控制的要求。
第四部分:电路设计步进电机控制器的电路设计包括电机驱动电路和控制电路。
其中电机驱动电路用于提供适当的电流和电压给步进电机,以实现其运转。
可以选择使用电流驱动器芯片或者使用MOSFET等器件设计电路。
控制电路主要包括单片机和其他外围电路,用于生成控制信号和接收输入信号。
第五部分:程序编写步进电机控制器的程序需要实现控制逻辑和信号的生成。
程序可以使用C语言或者汇编语言进行编写,通过单片机的GPIO口和定时器等模块来生成适当的脉冲信号和控制信号,驱动步进电机实现转动和定位。
综上所述,基于单片机的步进电机控制器设计涉及到步进电机的基本原理、常见的控制方式、单片机的选择、电路设计和程序编写等多个方面。
通过合理的设计和实现,可以实现对步进电机的精确控制和定位,为机械和自动化领域的应用提供便利。
步进电机控制器的设计
扪 【
…
鲣 …l i广 几 : 1 . ; : : ni 3 O H : 1: r 门 n n 门: I 鲮 l2 H l n :n n n :门 n . : :n … 0 ; : 广 n l
l M ; 门; 门. 几 几 八 :几 几 : l 1 门 ; : 几 几
l: j
_ 埘 : : : : : .1几 O 。 . . . : ; ] I 几 几 几 几 r : 1
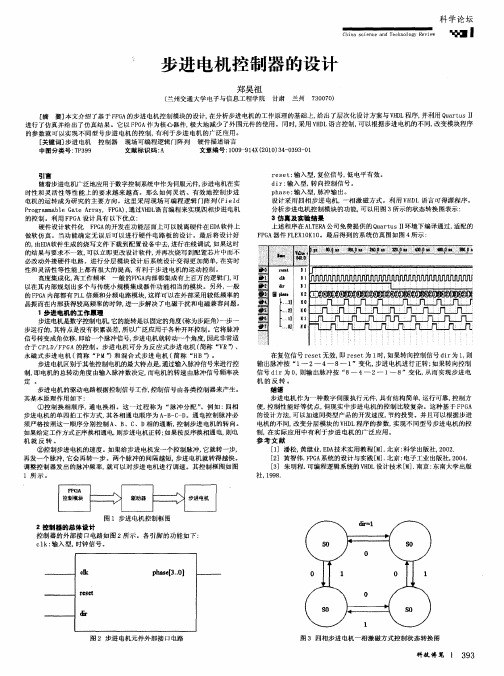
在 复位 信号 r s t e e 无效 , r s t 1 如 果转 向控 制信 号 dr 1 则 即 e e 为 时, i为 , 输 出脉冲 按 “ — 2 4— 8 1 1 — — ”变 化 , 步进 电机 进 行 正转 : 如果 转 向控制 信 号 d r为 0 则 输 出脉 冲按 “ i , 8— 4— 2 1 8”变化 , — — 从而 实现 步进 电
r s t 输入 型, ee : 复位信 号, 电平 有 效 。 低 d r 输入 型 , 向控 制信 号 。 i: 转 p a e 输入 型, hs : 脉冲 输 出 。 设计采 用 四相 步 进 电机, 相激 磁 方式 。利 用 V D 一 H L语 言 可得源 程 序 分 析步进 电机控 制模 块 的功能 , 以用 图 3所示 的状 态转换 图表示 : 可
智能步进电机控制器设计
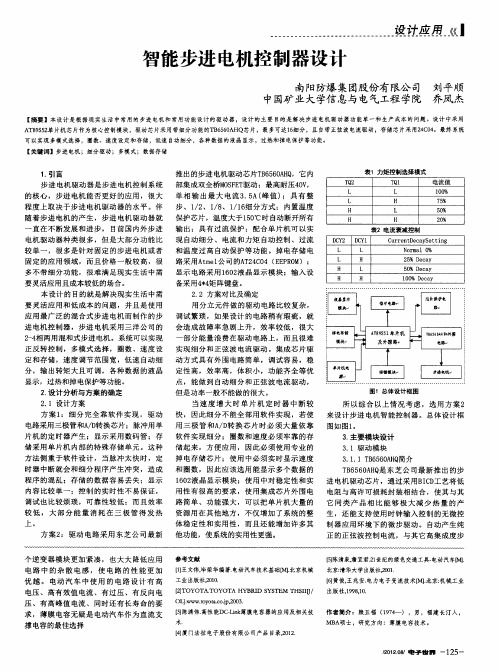
表 1力矩控制选择模式
TQ2
L
TQ1
L
电流 值
1O0%
L
H
75%
H
L
50%
H
H
20%
表 2 电流 衰 减 控 制
电机 驱 动 器种 类 很 多 ,但 是 大 部分 功 能 比 现 自动 细 分 、 电流 和 力矩 自动控 制 、过 流 DCY2 DCY1
片机 的定 时器 产 生 ;显示 采 用数 码 管 :存 软件 实 现细 分 ; 圈数 和速 度 必 须牢 靠 的存 储采 用 单 片机 内部 的特殊 存 储 单元 。 这种 储起 来 ,方 便 应用 ,因此 必 须使 用 专业 的
3.主要 模块设 计 3.1驱 动模块
方法 侧 重 于软 件 设计 ,当脉 冲太 快 时 ,定 时器 中断就 会 和细 分 程序 产 生冲 突 ,造 成 程序 的混 乱 ;存储 的数据 容 易 丢失 ; 显示 内容 比较 单一 ;控 制 的 实时 性不 易保证 , 调试 也 比较 烦 琐 ,可 靠性 较 低 ;而 且 效率 较 低 ,大 部 分 能 量 消 耗 在 三 极 管得 发 热 上 。
CurrentDecaySetting
较 单一 ,很 多是 针对 固定 的步进 电机 或者 和温 度 过 高 自动保 护 等 功 能 。掉 电存储 电
固定 的应 用领 域 ,而 且价 格 一般 较 高 ,很 路采 用Atmel公司 的AT24C04 (EEPROM) ;
多 不带 细 分功 能 ,很 难满 足 现 实生 活 中 需 显示 电路采 用 1602液 晶 显示 模 块 ;输入 设
掉 电存 储 芯片 ;使 用 中必 须 实 时显 示速 度 和 圈数 , 因此 应该 选 用 能显 示 多个 数据 的 1602液 晶显示 模 块 ;使 用 中对 稳定 性和 实 用性 有 很 高的 要求 ,使用 集 成 芯片 外 围 电 路简 单 、功 能 强大 ,可 以把 单 片机 大量 的 资源 用在 其 他 地方 ,不仅 增 加 了系 统 的整 体稳 定 性和 实 用性 ,而且 还 能增 加 许 多其
基于FPGA的步进电机控制器设计

基于FPGA的步进电机控制器设计步进电机是一种常见的电动机,具有精准控制和高可靠性的特点。
而FPGA(Field Programmable Gate Array)是一种可编程逻辑器件,可以实现复杂逻辑功能。
结合FPGA和步进电机进行控制,可以实现更高精度和更灵活的控制方式。
首先,步进电机的控制需要确定三个参数:步进角度、步进速度和步进方向。
FPGA可以通过编程的方式实现对这些参数的实时控制。
基于FPGA的步进电机控制器设计需要实现以下几个模块:1.步进电机驱动器:这个模块负责将FPGA输出的控制信号转换为适合步进电机的电压和电流。
可以使用高驱动能力的电路来驱动步进电机,确保电机可以正常运行。
2.位置控制器:这个模块负责根据输入的步进角度和方向控制步进电机的转动。
可以使用计数器和比较器来实现精确的角度控制,通过FPGA 的编程方式可以实时调整步进角度和方向。
3.速度控制器:这个模块负责调整步进电机的转动速度。
可以使用定时器和计数器来实现一个精确的时间基准,通过调整计数器的数值来控制步进电机的速度。
FPGA的编程方式可以实时调整步进速度。
4.通信接口:这个模块负责与外部设备进行通信。
可以使用UART、SPI或者I2C等通信协议,通过FPGA的外部接口与其他设备进行交互。
以上几个模块可以通过FPGA内部的硬件描述语言(如VHDL或Verilog)进行编程实现。
通过FPGA的编程方式,可以实时调整步进电机的控制参数,提高步进电机的精度与稳定性。
但是,基于FPGA的步进电机控制器设计也存在一些挑战。
首先是硬件资源的限制,FPGA的资源有限,需要合理分配资源,确保系统的运行效率和稳定性。
其次是时序设计的复杂性,步进电机的精确控制需要高频率的脉冲信号,要求FPGA具备快速响应和高速计数的能力。
综上所述,基于FPGA的步进电机控制器设计可以实现精确控制和高可靠性,并且具有灵活性和可编程性,可以适应不同的应用场景。
步进电机控制系统设计报告
课程设计报告单片机课程设计课程设计题目:步进电机无级调速系统设计姓名:学号:专业:班级:指导教师:10年4月29 日目录摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过IO口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机;同时,用 4个按键来对电机的状态进行控制,并用数码管动态显示电机的转速。
系统由硬件设计和软件设计两部分组成。
其中,硬件设计包括AT89C51单片机的最小系统、电源模块、键盘控制模块、步进电机驱动(集成达林顿ULN2003)模块、数码显示(SM420361K数码管)模块、测速模块(含霍尔片UGN3020)6个功能模块的设计,以及各模块在电路板上的有机结合而实现。
软件设计包括键盘控制、步进电机脉冲、数码管动态显示以及转速信号采集模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并将步进电机的转动速度动态显示在LED数码管上,对速度进行实时监控显示。
软件采用在Keil软件环境下编辑的C语言。
本系统具有智能性、实用性及可靠性的特点。
本控制系统的设计采用实验室中的试验箱单片机控制,通过人为按动各开关实现步进电机的开关,以及电机的加速及减速功能,另外还增加可设正反转的功能,具有灵活方便、适应范围广易懂的特点,能够满足实现自身实践动手能力提高的需求。
步进电机控制器的设计
m a c ndd i n rn il ft em ir p o e s rS n e a rvig p icp eo h co r c so TM 3 F1 3 2 0 RBT6a d te se oo ’ d iig c i 2 . i p rd sg e n h tpm trS rvn hp L6 08 Th spa e e i n da
n w p tpmoo o t l rwh s p t us f r igc i s rvd db iet ii l rq e c nh s e DDS . h ot e t es tr nr l , oei u leo i n hpwa o ie ydrc gt eu n ys tei r( y e c oe n p dv p d af y z )T esf —
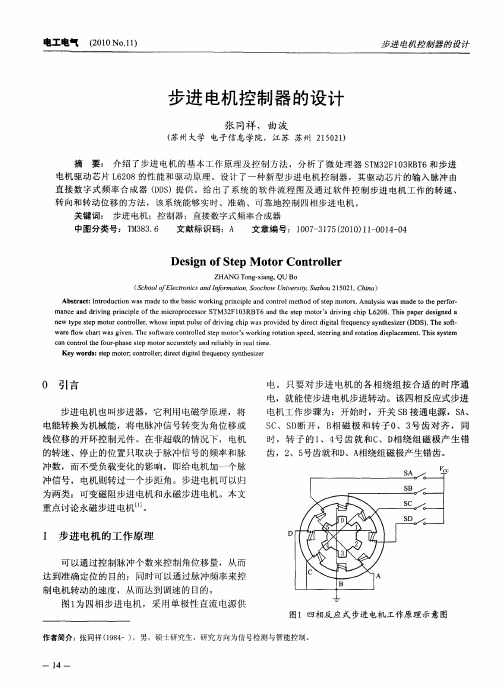
为 两类 :可变磁 阻 步进 电机 和永 磁步 进 电机 。本 文
重 点讨论永 磁步进 电机 …。
1 步 进 电 机 的 工 作 原 理
可 以通过控 制脉 冲个 数来控 制角 位移量 ,从而 达 到准确 定位 的 目的 :同时可 以通过 脉冲频 率来 控
制 电机转 动 的速 度 ,从而达 到调速 的 目的 。
c n c n r lt e f u — ha e s e t r c ur t l n e i bl e l i . a o to h o rp s t p mo o c a e y a d r la y i r a me a n t
Ke r s se t r c nto lr d r c gi l r q e c y t e ie y wo d : t p mo o ; o r l ; ie t e di t e u n y s n h sz r af
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现1. 概述步进电机是一种非常常见的电动机,在许多自动化系统和工控设备中得到广泛应用。
它们具有精准的定位能力和高效的控制性能。
本文将介绍如何使用STM32微控制器来设计和实现步进电机控制系统。
2. 硬件设计首先需要确定步进电机的规格和要求,包括步距角、相数、电流和电压等。
根据步进电机的规格,选择合适的驱动器芯片,常见的有L298N、DRV8825等。
接下来,将选定的驱动器芯片与STM32微控制器相连。
通常,步进电机的控制信号需要使用到微控制器的GPIO引脚,同时由于步进电机的工作电流比较大,需要使用到微控制器的PWM输出信号来调节驱动器芯片的电流限制。
除此之外,还需要一个电源电路来提供驱动器和步进电机所需的电源。
可以选择使用一个电源模块,也可以自行设计电源电路。
3. 软件设计软件设计是步进电机控制系统的核心部分,主要包括步进电机驱动代码的编写和控制算法的实现。
首先,需要在STM32的开发环境中编写步进电机驱动代码。
根据所选的驱动器芯片和步进电机规格,编写相应的GPIO控制代码和PWM输出代码。
同时,可以添加一些保护性的代码,例如过流保护和过热保护等。
接下来,需要设计和实现步进电机的控制算法。
步进电机的控制算法通常是基于位置控制或速度控制的。
对于位置控制,可以使用开环控制或闭环控制,闭环控制通常需要使用到步进电机的编码器。
对于开环控制,可以通过控制步进电机的脉冲数来控制位置。
通过控制脉冲的频率和方向,可以实现步进电机的转动和停止。
这种方法简单直接,但是定位精度有限。
对于闭环控制,可以使用PID控制算法或者更高级的控制算法来实现位置控制。
通过读取步进电机的编码器反馈信号,可以实时调整控制输出。
这种方法可以提高定位精度和抗干扰能力,但是算法实现相对复杂。
4. 系统实现在完成硬件设计和软件设计后,可以进行系统的调试和实现。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
基于S7-200PLC步进电机调速控制—步进驱动控制系统设计论文
摘要步进电动机具有快速起停、精确步进和定位等特点,所以常用作工业过程控制及仪器仪表,使用PLC可编程控制器实现步进电动机驱动,可使步进电动机的抗干扰能力强,可靠性高,同时,由于实现了模块化结构,是系统结构十分灵活,而且编程语言简短易学,便于掌握,可以进行在线修改,柔性好,体积小,维修方便。
本设计是利用PLC做进电动机的控制核心,用按钮开关的通断来实现对步进电机正,反转控制,而且正,反转切换无须经过停车步骤。
其次可以通过对按钮的控制来实现对高,低速度的控制。
充分发挥PLC的功能,最大限度地满足被控对象的控制要求,是设计PLC 控制系统的首要前提,这也是设计最重要的一条原则。
本设计更加便于实现对步进电机的制动化控制。
其主要内容如下:1了解PLC控制步进电机的工作原理2掌握PLC的硬件构成,完成硬件选型3设计PLC的控制系统4用STEP 7完成PLC的编程关键词:步进电机;PLC控制;电机正反转;高低速控制AbstractStepper motor has a quick starts and stops, precision stepping and positioning features, commonly used for industrial process control and instrumentation, PLC programmable controller stepper motor drive can stepper motor anti-interference ability, high reliability, at the same time, due to the modular structure, the system structure is very flexible, and programming languages brief to learn, easy to master, can be modified online, good flexibility, small size, easy maintenance.This design is the use of PLC built into the core of the motor control button to switch on and off to the stepper motor is the reverse control, and positive, reverse switch without having to go through the parking step. Followed by the button control to achieve the high and low speed control. Give full play to the functions of PLC as possible to meet the control requirements of the controlled object is the most important prerequisite for the design PLC control system, which is designed to the most important principle. This design is easier to achieve braking control of the stepper motor. Its main contents are as follows:An understanding of PLC control the working principle of the stepper motor2 grasp the PLC hardware structure, the completion hardware selection3 Design of PLC control system4 complete PLC programming with STEP 7Key words: Stepper motor; PLC control; motor reversing; high and low speed control目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 PLC步进驱动控制系统研究和意义 (1)1.2 国内外PLC的发展 (1)1.3 国内外步进电机的发展概况 (2)1.4 PLC步进驱动控制系统主要研究工作 (3)2 步进电机及PLC简介 (4)2.1 步进电机简介 (4)2.1.1步进电机的分类 (4)2.1.2步进电机的基本参数 (4)2.1.3步进电机的特点 (5)2.2 步进电机在工业中的应用 (5)2.3 PLC的特点 (6)2.4 PLC技术在步进电机控制中的应用 (6)3 PLC控制步进电机工作方式的选择 (8)3.1 常见的步进电机的工作方式 (8)3.2 步进电机控制原理 (8)3.2.1控制步进电机换向顺序 (8)3.2.2控制步进电机的转向 (8)3.2.3控制步进电机的速度 (8)3.3 PLC控制步进电机的方法 (9)3.4 PLC控制步进电机的设计思路 (10)4 S7-200PLC控制步进电机硬件设计 (12)4.1 S7-200PLC的介绍 (12)4.1.1硬件系统 (12)4.1.2软元件 (13)4.2 步进电机的选择 (14)4.3 步进电机驱动电路设计 (15)4.3.1驱动器的选择 (15)4.3.2步进电机驱动电路 (16)4.3.3驱动电路接口 (16)4.3.4电气原理图 (17)4.4 PLC驱动步进电机 (17)5 S7-200PLC控制步进电机软件设计 (19)5.1 STEP7-MICRO/WIN32概述 (19)5.1.1基本功能 (19)5.1.2运动控制 (19)5.1.3创建调制解调模块程序 (19)5.2 程序的编写 (21)5.3 梯形图程序设计 (22)5.3.1CPU的选择 (22)5.3.2输入输出编址 (22)5.3.3状态真值表 (22)5.4 梯形图程序 (23)6 总结 (30)6.1 全文总结 (30)6.2 不足之处及展望 (30)致谢 (31)参考文献 (32)1绪论1.1 PLC步进驱动控制系统研究和意义基于步进电动机良好的控制和准确定位特性,被广泛应用在精确定位方面,诸如数控机床、喷绘机、工业控制系统、自动控制计算装置、自动记录仪表等自动控制领域。
步进电机控制器课程设计
步进电机控制器课程设计一、课程目标知识目标:1. 让学生掌握步进电机的原理、结构及其工作方式;2. 使学生了解步进电机控制器的基本组成、功能及其在自动化控制中的应用;3. 引导学生掌握步进电机控制器的编程方法,能够编写简单的控制程序。
技能目标:1. 培养学生运用步进电机控制器进行实际电路搭建与调试的能力;2. 提高学生分析和解决步进电机控制过程中出现问题的能力;3. 培养学生团队协作、沟通交流的能力。
情感态度价值观目标:1. 培养学生对步进电机控制器及相关自动化设备的兴趣,激发学生探究精神;2. 增强学生的创新意识,鼓励学生勇于尝试,培养解决问题的自信心;3. 引导学生认识到科技对社会发展的推动作用,增强学生的社会责任感。
课程性质分析:本课程为实践性较强的课程,旨在帮助学生将理论知识与实际应用相结合,提高学生的动手能力和实际操作技能。
学生特点分析:学生在前期已经学习了电机原理、电子技术等相关知识,具备一定的理论基础,但实际操作经验不足。
教学要求:1. 结合学生特点,注重理论与实践相结合,提高学生的实际操作能力;2. 注重培养学生的团队协作能力和创新能力;3. 关注学生的个体差异,因材施教,提高教学质量。
二、教学内容1. 步进电机原理与结构- 介绍步进电机的种类、原理及特点;- 分析步进电机的结构及其工作方式;- 结合教材第3章第2节内容,阐述步进电机在自动化控制系统中的应用。
2. 步进电机控制器组成与功能- 讲解步进电机控制器的硬件组成及各部分功能;- 介绍步进电机控制器的软件编程方法;- 引导学生阅读教材第4章第1节,了解控制器在自动化设备中的应用实例。
3. 步进电机控制器编程与调试- 教授步进电机控制器编程的基本语法和技巧;- 指导学生编写简单的控制程序,实现步进电机的运动控制;- 结合教材第4章第3节,组织学生进行实际电路搭建与调试,培养学生的动手能力。
4. 步进电机控制应用案例分析- 分析典型的步进电机控制应用案例,如数控机床、机器人等;- 引导学生了解教材第5章相关内容,探讨步进电机在各个领域的应用前景。
步进电机控制器的设计
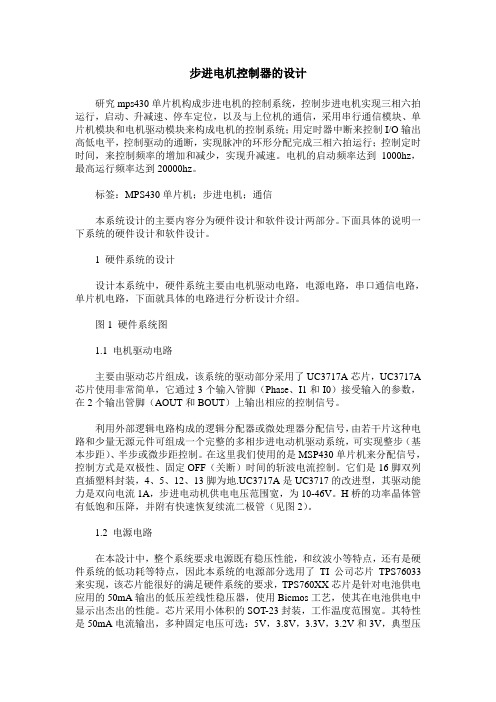
步进电机控制器的设计研究mps430单片机构成步进电机的控制系统,控制步进电机实现三相六拍运行,启动、升减速、停车定位,以及与上位机的通信,采用串行通信模块、单片机模块和电机驱动模块来构成电机的控制系统;用定时器中断来控制I/O输出高低电平,控制驱动的通断,实现脉冲的环形分配完成三相六拍运行;控制定时时间,来控制频率的增加和减少,实现升减速。
电机的启动频率达到1000hz,最高运行频率达到20000hz。
标签:MPS430单片机;步进电机;通信本系统设计的主要内容分为硬件设计和软件设计两部分。
下面具体的说明一下系统的硬件设计和软件设计。
1 硬件系统的设计设计本系统中,硬件系统主要由电机驱动电路,电源电路,串口通信电路,单片机电路,下面就具体的电路进行分析设计介绍。
图1 硬件系统图1.1 电机驱动电路主要由驱动芯片组成,该系统的驱动部分采用了UC3717A芯片,UC3717A 芯片使用非常简单,它通过3个输入管脚(Phase、I1和I0)接受输入的参数,在2个输出管脚(AOUT和BOUT)上输出相应的控制信号。
利用外部逻辑电路构成的逻辑分配器或微处理器分配信号,由若干片这种电路和少量无源元件可组成一个完整的多相步进电动机驱动系统,可实现整步(基本步距)、半步或微步距控制。
在这里我们使用的是MSP430单片机来分配信号,控制方式是双极性、固定OFF(关断)时间的斩波电流控制。
它们是16脚双列直插塑料封装,4、5、12、13脚为地.UC3717A是UC3717的改进型,其驱动能力是双向电流1A,步进电动机供电电压范围宽,为10-46V。
H桥的功率晶体管有低饱和压降,并附有快速恢复续流二极管(见图2)。
1.2 电源电路在本設计中,整个系统要求电源既有稳压性能,和纹波小等特点,还有是硬件系统的低功耗等特点,因此本系统的电源部分选用了TI公司芯片TPS76033来实现,该芯片能很好的满足硬件系统的要求,TPS760XX芯片是针对电池供电应用的50mA输出的低压差线性稳压器,使用Bicmos工艺,使其在电池供电中显示出杰出的性能。
基于单片机的步进电机的控制器设计
基于单片机的步进电机的控制器设计在现代工业自动化和控制领域中,步进电机因其精确的定位和可控的旋转角度而得到了广泛的应用。
而设计一个高效、稳定且易于操作的基于单片机的步进电机控制器则成为了实现精确控制的关键。
一、步进电机的工作原理要设计步进电机的控制器,首先需要了解步进电机的工作原理。
步进电机是一种将电脉冲信号转换成角位移或线位移的开环控制电机。
它由定子和转子组成,定子上有若干个磁极,磁极上绕有绕组。
当给定子绕组依次通电时,产生的磁场会驱动转子按照一定的方向和步距角转动。
步距角是指每输入一个电脉冲信号,转子所转过的角度。
步距角的大小取决于电机的结构和控制方式。
常见的步距角有 18°、09°等。
通过控制输入电脉冲的频率和数量,可以精确地控制步进电机的转速和转角。
二、单片机的选择在设计控制器时,单片机的选择至关重要。
常见的单片机如 51 系列、STM32 系列等都可以用于控制步进电机。
51 系列单片机价格低廉,开发简单,但性能相对较低;STM32 系列单片机性能强大,资源丰富,但开发难度相对较大。
考虑到控制的精度和复杂程度,我们可以选择STM32 系列单片机。
例如,STM32F103 具有较高的处理速度和丰富的外设接口,能够满足步进电机控制器的需求。
三、控制器的硬件设计硬件设计主要包括单片机最小系统、驱动电路、电源电路等部分。
单片机最小系统是控制器的核心,包括单片机芯片、时钟电路、复位电路等。
STM32F103 的最小系统通常需要外部晶振提供时钟信号,以及合适的复位电路保证单片机的可靠启动。
驱动电路用于放大单片机输出的控制信号,以驱动步进电机工作。
常见的驱动芯片有 ULN2003、A4988 等。
以 A4988 为例,它可以接收来自单片机的脉冲和方向信号,并输出相应的电流来驱动步进电机。
电源电路则为整个系统提供稳定的电源。
通常需要将外部输入的电源进行降压、稳压处理,以满足单片机和驱动电路的工作电压要求。
微机原理及应用课程设计

祝同学们: 顺利完成课设任务!
评分标准
优秀:能独立完成设计要求所规定的全部内容,设计方案正 确,基本概念清楚,有独到的见解或创造性。报告书写规 范,条理清晰。 良好:能较好完成设计要求所规定的全部内容,设计方案正 确,分析问题正确、基本概念清楚。报告书写较规范,条理 较清晰。 中等:能完成设计要求规定的全部内容,设计方案基本正 确,基本概念清楚。报告书写较规范,语言流畅。 及格:基本完成设计要求规定的内容,设计方案基本合理, 基本概念较清楚。报告书写比较认真,无抄袭现象。 不及格:未完成设计要求规定的内容,设计方案不合理,或 有较严重缺陷,基本概念不清楚。对有抄袭他人设计图(论 文)或找他人代画设计图纸、代做论文等行为的弄虚作假者 一律按不及格处理。
自由组合,2~3人为一小组。 各组的课设题目: 小组成员学号的后两位之和除8的余数 加1即为课程设计的题目号。 请班长或学委在周二上午将分组和选题情况 表发到邮箱:miao_xian@
基本要求
1. 周二至周五全天在5503实验室(上午8:30-11:30,下午
2:30-5:30 不定时考勤)。 2. 针对所选课题进行硬件设计,绘制系统结构框图和硬件接 线图,并在实验系统上完成电路的连接和调试。 3. 根据所选课题的要求对微机系统进行程序设计,绘制程序总 体流程图并编写程序上机调试,要求对源程序附加程序设计 说明和程序注释。 4. 根据2、3两项写出课程设计报告,要求条理清晰、语言流畅、 绘图规范,设计报告要对整个设计过程进行归纳和总结,对 设计中存在的问题和不足进行分析,提出解决的方法和措施, 以及对本次课设实践的认识、收获和感想。
设计进度安排
周一:分组,选择设计题目,查阅相关资料 周二到周四:软硬件设计,上机调试,撰写设计报告 周五:验收,答辩 注1:周五之前完成设计的组随时可以验收,早完成的组成 绩评优率高。 注2:验收完的组,程序不可扩散给其他同学,否则影响本 组同学的成绩。
基于单片机控制的步进电机调速系统的设计

基于单片机控制的步进电机调速系统的设计步进电机是一种常用的电机类型,它通常用来实现精确定位和控制运动。
步进电机的控制需要一个精确的调速系统来确保稳定的运行和准确的位置控制。
本文将基于单片机控制的步进电机调速系统进行设计。
首先,我们需要选择合适的硬件以及编程平台。
本设计选择使用Arduino Uno作为单片机控制器,它具有易用性和强大的控制功能。
步进电机选择了NEMA 17型号,它具有较高的分辨率和扭矩输出。
接下来,进行电路设计与连接。
将步进电机的四个线圈连接到单片机的GPIO引脚上,并使用电流驱动模块控制电机的供电。
通过连接外部电源,电流驱动器将为步进电机提供稳定的电流,以确保电机能够正常工作。
在编程方面,首先需要编写初始化代码,配置单片机的GPIO引脚以及串口通信功能。
然后,可以使用Arduino提供的步进电机库来控制电机的旋转。
该库提供了简单的命令来控制步进电机的转动方向和转速。
为了设计调速系统,我们可以使用一个旋转编码器来实时监测电机的转速。
旋转编码器将会测量电机的转动次数,从而计算出电机的转速。
在单片机的程序中,我们可以设置一个目标转速,并根据旋转编码器的数据来调整电机的驱动频率。
为了实现平滑的调速过程,我们可以使用PID控制算法来调整电机的驱动频率。
PID控制算法是一种经典的反馈控制算法,它可以根据目标值和实际值之间的差异来调整控制信号。
通过不断地比较电机的实际速度与目标速度,PID控制算法可以动态地调整电机的驱动频率,以达到稳定的调速效果。
最后,我们可以设计一个用户界面来设置目标速度和监控电机的运行状态。
通过串口通信功能,单片机可以与上位机进行数据交互,用户可以通过上位机发送指令来设置目标速度,并且可以实时监测电机的转速和运行状态。
总结起来,基于单片机控制的步进电机调速系统设计需要进行硬件选择与连接、软件编程以及用户界面设计。
通过合理地选择硬件和软件方案,以及使用PID控制算法,我们可以实现一个稳定且准确的步进电机调速系统。
基于stm32的步进电机控制系统设计与实现

基于STM32的步进电机控制系统设计与实现1. 引言步进电机是一种常见的电动机类型,具有定位准确、结构简单、控制方便等优点,在自动化控制领域得到广泛应用。
本文将介绍基于STM32单片机的步进电机控制系统设计与实现,包括硬件设计、软件开发和系统测试等内容。
2. 硬件设计2.1 步进电机原理步进电机是一种将输入脉冲信号转换为角位移的设备。
其工作原理是通过改变相邻两相之间的电流顺序来实现转子旋转。
常见的步进电机有两相、三相和五相等不同类型。
2.2 STM32单片机选择在本设计中,我们选择了STM32系列单片机作为控制器。
STM32具有丰富的外设资源和强大的计算能力,非常适合用于步进电机控制系统。
2.3 步进电机驱动模块设计为了实现对步进电机的精确控制,我们需要设计一个步进电机驱动模块。
该模块主要包括功率放大器、驱动芯片和保护电路等部分。
2.4 电源供应设计步进电机控制系统需要稳定可靠的电源供应。
我们设计了一个电源模块,用于为整个系统提供稳定的直流电源。
3. 软件开发3.1 开发环境搭建在软件开发过程中,我们需要搭建相应的开发环境。
首先安装Keil MDK集成开发环境,并选择适合的STM32单片机系列进行配置。
3.2 步进电机控制算法步进电机控制算法是实现步进电机精确控制的关键。
我们可以采用脉冲计数法、速度闭环控制等方法来实现对步进电机的位置和速度控制。
3.3 驱动程序编写根据硬件设计和步进电机控制算法,我们编写相应的驱动程序。
该程序主要负责将控制信号转换为驱动模块所需的脉冲信号,并通过GPIO口输出。
3.4 系统调试与优化在完成软件编写后,我们需要对系统进行调试和优化。
通过调试工具和示波器等设备,对系统进行性能测试和功能验证,以确保系统工作正常。
4. 系统测试与评估在完成硬件设计和软件开发后,我们需要对系统进行全面的测试和评估。
主要包括功能测试、性能测试和稳定性测试等内容。
4.1 功能测试功能测试主要验证系统是否按照预期工作。
步进电机控制系统的设计
步进电机控制系统的设计
步进电机控制系统是一种常见的电机控制系统,用于控制步进电机的速度和方向。
设计步进电机控制系统需要考虑以下几个方面:
1. 选择合适的步进电机:根据应用场景,选择适合的步进电机型号和规格。
根据步进电机的电阻、电感等参数,计算出合适的电流和电压。
2. 选择合适的驱动器:根据步进电机的规格和控制要求,选择适合的驱动器型号。
常见的驱动器有常流驱动器和常压驱动器两种。
常流驱动器适用于控制步进电机的转速和保证输出力矩的精度;常压驱动器适用于控制步进电机的位置和运动精度。
3. 设计控制电路:根据步进电机的控制要求,设计相应的控制电路,包括信号输入电路、脉冲控制电路和电源电路。
根据实际需求,可以选择使用微控制器、PLC或者其他控制器实现控制。
4. 编写控制程序:根据实际控制要求,编写相应的控制程序。
程序可以使用各种高级语言编写,如C语言、Python等。
5. 测试和调试:完成步进电机控制系统的设计后,需要进行测试和调试。
测试包括电路测试和控制程序测试。
进行测试时需要注意安全,避免电路短路、过载等问题。
在调试过程中,需要根据测试结果进行调整优化,直到达到预期的控制效果。
总之,步进电机控制系统的设计需要充分考虑电机的规格和控制要求,选择合适的驱动器和控制器,设计合适的控制电路和编写适合的控制程序,并进行充分的测试和调试。
步进电机控制系统设计

步进电机控制系统设计目录1绪论 (3)1.1 步进电机概述 (3)1.2 步进电机的特征 (3)1.3 步进电机驱动系统概述 (4)1.4 课题研究的主要内容 (4)2步进电机驱动系统的方案论证 (5)2.1 步进电机驱动系统简介 (5)2.2 步进电机驱动器的特点 (5)2.3 混合式步进电机的驱动电路分类和性能比较 (6)2.3.1 双极性驱动器与单极性驱动器 (6)2.3.2 单电压驱动方式 (8)2.3.3 高低压驱动方式 (9)2.3.4 斩波恒流驱动 (10)2.4 方案的确定 (10)3混合式步进电动机驱动控制系统硬件设计 (11)3.1单片机最小系统 (11)3.2 红外遥控电路 (12)3.2.1 红外发射电路 (12)3.2.2 红外接收电路 (13)3.3 LCD显示电路 (14)3.4 双机通讯 (15)3.5 步进电机驱动部分 (16)3.5.1 单极性步进电机驱动 (16)3.5.2 双极性步进电机驱动 (18)3.6 电源电路 (18)4 软件设计 (19)4.1 主机LCD显示菜单程序 (19)4.2 双机通讯程序 (20)4.3 下位机步进电机驱动程序 (22)5 驱动器试验结果 (24)5.1 概述 (24)5.2 试验内容和结论 (24)总结 (26)参考文献 (27)1绪论1.1 步进电机概述步进电机是将电脉冲信号转换为角位移或线性运动的执行器。
它由步进电机及其动力驱动装置组成,形成开环定位运动系统。
当步进驱动器接收到脉冲信号时,它驱动步进电机以设定方向以固定角度(步进角度)旋转。
脉冲输入越多,电机旋转的角度越大;输入脉冲的频率越高,电机的速度越快。
因此,可以通过控制脉冲数来控制角位移,从而达到精确定位的目的;同时,通过控制脉冲频率可以控制电机转速,从而达到调速的目的。
根据自身结构,步进电机可分为三类:反应型(VR),永磁型(PM)和混合型(HB)。
混合式步进电机具有无功和永磁两种优点,应用越来越广泛。
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现1.引言步进电机作为一种常用的电机类型,其运动精度高、响应速度快,广泛用于各种自动化控制系统中。
本文基于STM32微控制器,设计并实现了一个步进电机控制系统,旨在实现步进电机的精确控制和高效运动。
2.系统架构步进电机控制系统的基本架构包括电机驱动模块、控制模块和用户界面模块。
其中,电机驱动模块负责将控制信号转化为电机驱动信号,实现步进电机的精确控制;控制模块负责生成控制信号,控制步进电机的转动方式和速度;用户界面模块则提供用户交互接口,方便用户对步进电机的控制进行配置和监测。
3.硬件设计硬件设计包括STM32微控制器的选型和电机驱动电路的设计。
对于STM32选型,需要考虑处理器的计算能力和IO口的数量和功能,以及是否支持步进电机驱动的相关功能。
对于电机驱动电路的设计,需要选择适合步进电机的驱动芯片,并结合电机的特性设计适当的电源、滤波和保护电路。
4.固件设计固件设计是步进电机控制系统的核心部分,主要包括控制算法和通信协议。
控制算法通常使用脉冲/方向控制方式,通过控制PWM信号的占空比和频率实现步进电机的转动和速度控制。
通信协议可以选择UART、SPI或者I2C等常用的串行通信方式,通过与上位机或其他外部设备进行通信,实现系统的配置和监测功能。
5.软件实现软件实现主要包括嵌入式软件的开发和上位机软件的开发。
对于嵌入式软件,需要使用相关的开发工具,如Keil或STM32Cube IDE,编写控制算法和通信协议的代码,并进行调试和验证。
上位机软件则负责与嵌入式系统进行通信,提供配置和监测界面,并可通过图形化界面实现系统参数的配置和调节。
6.测试与验证测试与验证是确保步进电机控制系统功能和性能的有效手段。
可以通过虚拟仿真和实际硬件测试两种方式进行。
虚拟仿真可以通过软件仿真工具进行,验证系统功能的正确性和逻辑的合理性;实际硬件测试则需要将系统部署到实际硬件平台上,通过对电机运动和系统功能的实际操作和观察,验证系统的性能和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湖北汽车工业学院科技学院 KT1023-3 ONION
实时控制系统的步进电机速度控制器设计
设计内容与要求:利用TPC-H通用微机接口实验箱设计一个实时控制系统的步进电机速度控制器。
步进电机为四相,步距角为180/步,以单四拍方式运行。
要求采用定时中断的方法控制步进电机的速度,转速在1~60r/min之间连续可调,具有正反转控制功能。
程序如下:
DA TA SEGMENT
BUFF DW 0H,0BB8H,05DCH,3E8H,2EEH,258H,1F4H,1ACH,177H,14DH,12CH DW 110H,0FAH,0E6H,0D6H,0C8H,0BBH,0B0H,0A6H,9DH,96H
DW 8EH,88H,82H,7DH,78H,73H,6FH,6BH,67H,64H
DW 60H,5DH,5AH,58H,55H,53H,51H,4EH,4CH,4BH
DW 49H,47H,45H,44H,42H,41H,3FH,3EH,3DH,3CH
DW 3AH,39H,38H,37H,36H,35H,34H,33H,32H,32H
BUF DW 1H
BUF2 DB 0
DA TA ENDS
STAK SEGMENT
STA0 DB 128 DUP(?)
STAK ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DA TA,SS:STAK
START:MOV AX,DATA;
MOV DS,AX
;8255初始化
MOV DX,240BH ;288H~28FH
MOV AL,10001011B ; A口输出,C口输入
OUT DX,AL
;PA0-PA3控制电机的ABCD
;PC7正反转,PC6脉冲,PC5-PC0共6个控时间
;8253初始化
;计数器0
MOV DX,2403H; 280H~287H
MOV AL,00110110B;方式3
OUT DX,AL
MOV DX,2400H
MOV AX,1000
OUT DX,AL
MOV AL,AH
OUT DX,AL
MOV BUF2,33H ;A口输出初始值
MOV BX,OFFSET BUFF
MOV SI,0
;计数器1 方式0
NEXT:MOV AX,BUF
AND AX,3FH
MOV SI,AX
SAL SI,1
MOV AX,[BX+SI]
MOV BUF,AX
MOV DX,2403H ; 280H~287H
MOV AL,01110000B
OUT DX,AL
MOV DX,2401H
MOV AX,BUF
OUT DX,AL
MOV AL,AH
OUT DX,AL
L0:MOV DX,240AH
IN AL,DX
TEST AL,40H
JNZ L1
JMP L0
L1: TEST AL,80H
JNZ ZZ
;FZ:
AND AL,3FH
CBW
MOV BUF,AX
MOV AL,BUF2
ROR AL,1 ;<-,PA3~PA0接A~D
MOV BUF2,AL
JMP SCZ
ZZ:
AND AL,3FH
CBW
MOV BUF,AX
MOV AL,BUF2
ROL AL,1 ;->,PA3~PA0接A~D
MOV BUF2,AL
SCZ: MOV DX,2408H
;MOV AL,BUF2
OUT DX,AL ;A口最终的输出值
;有按键就退出
MOV AH,0BH
INT 21H
CMP AL,0FFH
JZ EXIT
MOV AX,BUF
CMP AL,1 ;最低速1r/min
JB L3
CMP AL,60 ;最高速60r/min
JA L4
JMP NEXT
L3:MOV AX,1
MOV BUF,AX
;CALL ASCI
JMP NEXT
L4:MOV AX,60
MOV BUF,AX
;CALL ASCI
JMP NEXT
;退出
EXIT:MOV AX,4C00H
INT 21H
CODE ENDS
END START。