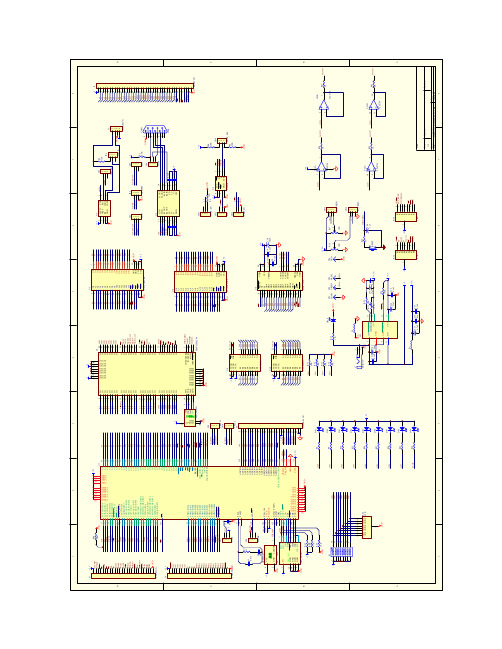
CEPARK CAN总线开发板V3.0原理图
合集下载
18.CAN总线工作原理

(4) 远程数据请求 可通过发送“遥控帧” 请求其他单元发送数据。
(5) 错误检测功能·错误通知功能·错误恢复功能 所有的单元都可以检测错误(错误检测功能)。 检测出错误的单元会立即同时通知其他所有单元(错误通知功能)。 正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结
束发送的单元会不断反复地重新发送此消息直到成功发送为止(错误恢复功 能)。
STM32 bxCAN主要特点
● 支持CAN协议2.0A和2.0B主动模式 ● 波特率最高可达1兆位/秒 ● 支持时间触发通信功能
发送
● 3个发送邮箱 ● 发送报文的优先级特性可软件配置 ● 记录发送SOF时刻的时间戳
接收
● 3级深度的2个接收FIFO
● 可变的过滤器组: ─ 在互联型产品中,CAN1和CAN2分享28个过滤器组 ─ 其它STM32F103xx系列产品中有14个过滤器组 ● 标识符列表 ● 记录接收SOF时刻的时间戳
● 同步段(SYNC_SEG):同步段为首段,用于同步CAN总线上的各个节点。 输入信号的跳变沿就发生在同步段,该段持续时间为1TQ。
● 时间段1(BS1):定义采样点的位置。其值可以编程为1到16个时间单元, 但也可以被自动延长,以补偿因为网络中不同节点的频率差异所造成的相 位的正向漂移。
● 时间段2(BS2):定义发送点的位置。其值可以编程为1到8个时间单元, 但也可以被自动缩短以补偿相位的负向漂移。
CAN_SJW=CAN_SJW_1tq; CAN_BS1=CAN_BS1_3tq; CAN_BS2=CAN_BS2_2tq; CAN_Prescaler = 48;
CAN波特率 200 KBPS 250 KBPS 400 KBPS 500 KBPS 800 KBPS
CAN总线原理图

F4
X642/4
F4
X393/2
F4
16114 0 5
电控气喇叭 电喇叭 35孔插接器、驾驶室 仪表台左搭铁点(驾驶室 ) 44孔插接器、驾驶室 9孔插接器 左前部电线束插接器(7孔)
16106
16102
16106
S226
Ⅰ 0
4
10
3
2
B
3/3
KD
KD
H142
C
H112
C
1 2 P
2
1
2
X22 KD KD
L 2 5
L 2 5
L 2 5
L 2 5
L 2 5
B 50
L
L
2/4 M 6 0
1/23 8/28 1/47 1/51 12/31 3/7 1/49 1/53
描 图
20
1
E6
X244 40 50 55
1
10
20 电源
30
描
校
旧底图总号
电气 原 理图 (WP10/CBCU)
标记 处数 通知 书号 签 字 日期
1 20
59000
59000
1/50 A 6 0 A 6 0 B 70
10/5
F1
1/5
1 02 1 03 1 08 1 09
1 05
1 06
1 10
1 11
63010 2 5
63010 2 5
63010 2 5
L 2 5
6 0
6 0
G
F5
F5
F5
A 6 0
L 2 5
L 2 5
L 2 5
G100
63010 2 5
X642/4
F4
X393/2
F4
16114 0 5
电控气喇叭 电喇叭 35孔插接器、驾驶室 仪表台左搭铁点(驾驶室 ) 44孔插接器、驾驶室 9孔插接器 左前部电线束插接器(7孔)
16106
16102
16106
S226
Ⅰ 0
4
10
3
2
B
3/3
KD
KD
H142
C
H112
C
1 2 P
2
1
2
X22 KD KD
L 2 5
L 2 5
L 2 5
L 2 5
L 2 5
B 50
L
L
2/4 M 6 0
1/23 8/28 1/47 1/51 12/31 3/7 1/49 1/53
描 图
20
1
E6
X244 40 50 55
1
10
20 电源
30
描
校
旧底图总号
电气 原 理图 (WP10/CBCU)
标记 处数 通知 书号 签 字 日期
1 20
59000
59000
1/50 A 6 0 A 6 0 B 70
10/5
F1
1/5
1 02 1 03 1 08 1 09
1 05
1 06
1 10
1 11
63010 2 5
63010 2 5
63010 2 5
L 2 5
6 0
6 0
G
F5
F5
F5
A 6 0
L 2 5
L 2 5
L 2 5
G100
63010 2 5
安富莱STM32F103ZE-EK(V3)_原理图

VREF+
VDDA
C50 104/50
VDD3.3V
VDD3.3V VDD3.3V VDD3.3V
C31 104/50
C44 104/50
[5] PA0/WKUP (DM9000AE中断) [4,5] PA1
[4,5] PA2/USART2_TX
(RS232串口2) [4,5] PA3/USART2_RX
1
2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18
19 20 21 22 23 24 25
26 27 28 29 30 31 32 33 34
35 36
PE2/TRACECK/FSMC_A23
PE3/TRACED0/FSMC_A19 PE4/TRACED1/FSMC_A20 PE5/TRACED2/FSMC_A21 PE6/TRACED3/FSMC_A22 VBAT PC13-TAMPER-RTC PC14-OSC32_IN PC15-OSC32_OUT PF0/FSMC_A0
[2,3,4,5,6] FSMC_D6
[2,3,4,5,6] FSMC_D7
[2,3,4,5,6] FSMC_D8 [2,3,4,5,6] FSMC_D9 [2,3,4,5,6] FSMC_D10 [2,3,4,5,6] FSMC_D11 [2,3,4,5,6] FSMC_D12
[4,5] PB10/USART3_TX [4,5] PB11/USART3_RX
PG7 [5]
(5向键-ok)
FSMC_INT2 [3,5] (NAND) FSMC_A15 [2,3,5]
PG15[5]
(5向键-up)
VDD3.3V
2407开发板原理图
PLD_RXD_OUT RXD EXTRXD
+3.3
141 95 77 67 42 4
R46 U2 3 5 8 2 VCC3.3 TXD VREF RXD RS CANH GND CANL 1 2 3 CAN_RX GND +5 1 2 3 4 1 4 7 6
J3
10K VDDO VDDO VDDO VDDO VDDO VDDO VDD VDD VDD VDD
R_CS SPISOMI SPISIMO SPICLK
80 78 74 71 68 64 61 57 53 51 48 45 43 39 34 31 127 130 132 134 136 138 143 5 9 13 15 17 20 22 24 27 96 87 84 82 92 89 93 120 97 23 19 131 73
GND
C
IN_VREFH VREFH EXT_VREFH
7 8 9 10 13 14 15 16 29 30 31 32 35 36 37 38
D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13 D14 D15
R6 10K JP14 1 2 3 BOOT_SEL
A0 A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 A12 A13 A14 A15 D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13 D14 D15 STRB DS PS IS R/W WE RD READY VISOE XINT1 W/R/IOPC0 IOPF6 CLKOUT
PWM1/IOPA6 PWM2/IOPA7 PWM3/IOPB0 PWM4/IOPB1 PWM5/IOPB2 PWM6/IOPB3 PWM7/IOPE1 PWM8/IOPE2 PWM9/IOPE3 PWM10/IOPE4 PWM11/IOPE5 PWM12/IOPE6 PDPINTB PDPINTA
+3.3
141 95 77 67 42 4
R46 U2 3 5 8 2 VCC3.3 TXD VREF RXD RS CANH GND CANL 1 2 3 CAN_RX GND +5 1 2 3 4 1 4 7 6
J3
10K VDDO VDDO VDDO VDDO VDDO VDDO VDD VDD VDD VDD
R_CS SPISOMI SPISIMO SPICLK
80 78 74 71 68 64 61 57 53 51 48 45 43 39 34 31 127 130 132 134 136 138 143 5 9 13 15 17 20 22 24 27 96 87 84 82 92 89 93 120 97 23 19 131 73
GND
C
IN_VREFH VREFH EXT_VREFH
7 8 9 10 13 14 15 16 29 30 31 32 35 36 37 38
D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13 D14 D15
R6 10K JP14 1 2 3 BOOT_SEL
A0 A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 A12 A13 A14 A15 D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13 D14 D15 STRB DS PS IS R/W WE RD READY VISOE XINT1 W/R/IOPC0 IOPF6 CLKOUT
PWM1/IOPA6 PWM2/IOPA7 PWM3/IOPB0 PWM4/IOPB1 PWM5/IOPB2 PWM6/IOPB3 PWM7/IOPE1 PWM8/IOPE2 PWM9/IOPE3 PWM10/IOPE4 PWM11/IOPE5 PWM12/IOPE6 PDPINTB PDPINTA
CAN总线协议入门

CAN总线物理特性 总线物理特性
• CAN总线的电平信号 总线的电平信号 • 速率与传输距离的关系
CAN总线电平信号 总线电平信号
VDiff DOM = 2V V 3,5V
Diff REC
= 0V
Vdiff
2,5V
CAN_H
Vdiff
CAN_L
隐性 显性 隐性
1,5V
速率与传输距离
CAN总线上任意两个节点之间的最大传输 总线上任意两个节点之间的最大传输 距离与其位速率相关。 距离与其位速率相关。
CAN总线协议入门 总线协议入门
目录
• • • • • • • • CAN总线的特点 总线的特点 CAN总线拓扑图及其模型 总线拓扑图及其模型 CAN总线分层结构 总线分层结构 物理特性 CAN总线报文 总线报文 仲裁机制 错误类型及处理机制 总结
CAN总线的特点 总线的特点
• CAN是到目前为止唯一有国际标准的现场 是到目前为止唯一有国际标准的现场 总线。 总线。 • CAN为多主方式工作,网络上任一节点均 为多主方式工作, 可在任意时刻主动地向网络上其他节点发 送信息,而不分主从。 送信息,而不分主从。 • 在报文标识符上,CAN上的节点分成不同 在报文标识符上, 上的节点分成不同 优先级,可满足不同的实时要求, 的优先级,可满足不同的实时要求,优先 级高的数据最多可在134µs内得到传输。 内得到传输。 级高的数据最多可在 内得到传输 • CAN采用非破坏总线仲裁技术。 采用非破坏总线仲裁技术 采用非破坏总线仲裁技术。
控制域(Control Field)(标准格式和扩展格式) 控制域 (标准格式和扩展格式) •主要功能:数据长度代码(DLC),指示数据帧的字节数目 主要功能:数据长度代码( ),指示数据帧的字节数目 主要功能 ), •DLC可以设置 到8的数字表示数据字节数(超过 的数字则认为 可以设置0到 的数字表示数据字节数 超过8的数字则认为 的数字表示数据字节数( 可以设置 是8,这种情况并不视为出错)。 ,这种情况并不视为出错)。 •两位保留位 和r0,用于扩展格式帧。保留位必须全部以显性电 两位保留位r1和 ,用于扩展格式帧。 两位保留位 平发送,但接收方可以接收显性、隐性及其任意组合的电平。 平发送,但接收方可以接收显性、隐性及其任意组合的电平。
CAN总线解析知识分享
2.12
构建节点,实现相应控制,由底向上分为四个部分:CAN节点电路、CAN控制器驱动、CAN应用层协议、CAN节点应用程序。
而哪些情况需要呢,主要就是,当使用2个CAN Omega对发或者当前网络中仅有2个CAN设备的时候,此时两个端点最好都加上终端匹配电阻,当然,前面也说过了,传输线长度不长的时候,也可以不需要2端120欧姆电阻,但为了信号完整性考虑,加上这两个电阻才是严谨的。
2个120欧姆电阻的意义在于,使用USB CAN调试某些不带终端电阻的中间节点设备时,有时候CAN总线上没有2个120欧姆电阻通信可能会异常,此时可以接入2个120欧姆电阻作为2个终端电阻来作阻抗匹配,这时候其他端点不应接入任何终端电阻!并且,这2个120欧姆电阻不可用1个60欧姆电阻代替!
位填充错误:通信线缆上违反通信规则时发生该错误。
当发生这五种错误之一时,发送节点或接受节点将发送错误帧
为防止某些节点自身出错而一直发送错误帧,干扰其他节点通信,CAN协议规定了节点的3种状态及行为。
2.10
当某节点没有做好接收的"准备"时,将发送过载帧,以通知发送节点。
2.11
用来隔离数据帧、远程帧与他们前面的帧,错误帧和过载帧前面不加帧间隔。
特点:低速CAN在CANH和CANL上串入2.2kΩ的电阻;高速CAN在CANH和CANL之间并入120Ω电阻。为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。(因为大多数双绞线电缆特性阻抗大约在100~120Ω。)
120欧姆只是为了保证阻抗完整性,消除回波反射,提升通信可靠性的,因此,其只需要在总线最远的两端接上120欧姆电阻即可,而中间节点并不需要接(接了反而有可能会引起问题)。因此各位在使用CAN Omega做CAN总线侦听的时候,大多数情况下是不需要这个120欧姆电阻的,当然,即使当前网络中并没有终端匹配电阻,只要传输线长度不长(比如SysCan360比赛环境中,传输线只有1-2米)CAN节点数量不多的情况下,不要这个120欧姆电阻也完全可以工作,甚至,你接任意电阻都是不会有影响的。因为此时传输线长度和波长还相差甚远,节点不多的情况下,反射波的叠加信号强度也不会很强,因此传输线效应完全可以忽略。
构建节点,实现相应控制,由底向上分为四个部分:CAN节点电路、CAN控制器驱动、CAN应用层协议、CAN节点应用程序。
而哪些情况需要呢,主要就是,当使用2个CAN Omega对发或者当前网络中仅有2个CAN设备的时候,此时两个端点最好都加上终端匹配电阻,当然,前面也说过了,传输线长度不长的时候,也可以不需要2端120欧姆电阻,但为了信号完整性考虑,加上这两个电阻才是严谨的。
2个120欧姆电阻的意义在于,使用USB CAN调试某些不带终端电阻的中间节点设备时,有时候CAN总线上没有2个120欧姆电阻通信可能会异常,此时可以接入2个120欧姆电阻作为2个终端电阻来作阻抗匹配,这时候其他端点不应接入任何终端电阻!并且,这2个120欧姆电阻不可用1个60欧姆电阻代替!
位填充错误:通信线缆上违反通信规则时发生该错误。
当发生这五种错误之一时,发送节点或接受节点将发送错误帧
为防止某些节点自身出错而一直发送错误帧,干扰其他节点通信,CAN协议规定了节点的3种状态及行为。
2.10
当某节点没有做好接收的"准备"时,将发送过载帧,以通知发送节点。
2.11
用来隔离数据帧、远程帧与他们前面的帧,错误帧和过载帧前面不加帧间隔。
特点:低速CAN在CANH和CANL上串入2.2kΩ的电阻;高速CAN在CANH和CANL之间并入120Ω电阻。为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。(因为大多数双绞线电缆特性阻抗大约在100~120Ω。)
120欧姆只是为了保证阻抗完整性,消除回波反射,提升通信可靠性的,因此,其只需要在总线最远的两端接上120欧姆电阻即可,而中间节点并不需要接(接了反而有可能会引起问题)。因此各位在使用CAN Omega做CAN总线侦听的时候,大多数情况下是不需要这个120欧姆电阻的,当然,即使当前网络中并没有终端匹配电阻,只要传输线长度不长(比如SysCan360比赛环境中,传输线只有1-2米)CAN节点数量不多的情况下,不要这个120欧姆电阻也完全可以工作,甚至,你接任意电阻都是不会有影响的。因为此时传输线长度和波长还相差甚远,节点不多的情况下,反射波的叠加信号强度也不会很强,因此传输线效应完全可以忽略。
现场总线技术4

地、电源
振荡器放大电路输入输出端 模式选择输入 输出驱动器的电源、地 输出驱动器0、1信号输出 中断输出 复位输入
VDD2、VSS2
RX0、RX1
输入比较器的电源、地
输入比较器的信号输入
《现场总线CAN原理与应用技术》教学课件
SJA1000-简化的模块结构
主 控 制 器
发送 缓冲器 接收 FIFO 验收 滤波器
《现场总线CAN原理与应用技术》教学课件
SJA1000-验收滤波器的配置(六)
四种配置情况之三:标准帧、双滤波器的配置 举例:要求只接收如下两个报文
报文1:(ID.28) 1011 1100 101(ID.18) 报文2:(ID.28) 1111 0100 101(ID.18) 单滤波器方式: n 0 2 1(高四位) ACRn 1x11 x100 101x xxxx xxxx AMRn 0100 1000
第六章 CAN总线
第一讲:CAN总线基础
《现场总线CAN原理与应用技术》教学课件
CAN总线( Controller Area Network )
是一种多主结构、串行通讯的现场总线 主设备 A C
A
B
C
D
B
多主结构
D
主从结构
《现场总线CAN原理与应用技术》教学课件
CAN总线( Controller Area Network )
SJA1000-PeliCAN模式下寄存器(二)
《现场总线CAN原理与应用技术》教学课件
SJA1000-发送/接收缓冲器(一)
描述符区
从数据字节1 的最高位发送
数据区
标准帧(SFF)格式
扩展帧(SFF)格式
《现场总线CAN原理与应用技术》教学课件
摊铺机CAN通讯原理与故障判断

CAN总线简介
CAN总线标准
• CAN总线标准之规定了物理层和数据链路层,至于应用层需要用户自定义。 • 不同的CAN标准仅物理层不同。 • 数据链路层,应用层:不同的应用领域使用不同的应用层标准。
CAN总线简介
CAN拓扑网络
连接在CAN总线上的设备叫做节点设备(CAN Node) 节C点AN主网要络包的括拓H扑o一st般、为控线制型器。和线收束发最器常。用的是双绞线,线
CAN总线简介
CAN总线简介
CAN总线是由德国研发和生产汽车电子产品著称的BOSCH公司开发的,并最终成为国际标准 (ISO11519),是国际上应用最广泛的现场总线之一。CAN总线是一种多主控(MultiMaster)的总线系统。传统总线系统如USB或以太网等是在总线控制器的协调下,实现从A 节点到B节点大量数据的传输。CAN网络的消息是广播式的,即在同一时刻网络上所有节点 侦测的数据是一致的,它是一种基于消息广播模式的串行通信总线。
CAN总线简介
因为传输距离越大,信号时延也越大,为了保证消息的正确采样,总线上 的信号速率相应也要下降。下图是推荐的信号速率与距离的关系。
CAN总线简介
CAN收发器
• CAN总线分高速CAN和低速CAN,收发器也分为高速CAN收发器(1Mbps)和低 速CAN收发器(125Kbps)。低速CAN也叫FaultTolerance CAN,指的是即使 总线上一根线失效,总线依然可以通信。
当CAN总线出现故障应如何检修?
✓ 在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有 可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断,根据诊断结果制订相关检 修方案,做到心中有数,目标明确。接着查找具体的故障部位和原因,同时结合相应的 检测方法和测量结果找到故障点,从而彻底排除故障。
can总线详解

原作者:PIAE 版主 整理:kidcao1987
握 CAN 总线的设计!下一讲,我们先介绍一下我们这回 can 助学的讲座内容和开 展的形式,欢迎大家随时提出自己的意见,并参与讨论!你的支持是我们 Cepark 前进的动力。还等什么?Just join us! CAN 学习讲座之二:回顾一下老朋友:单片机
1. 基础电路知识:建立起电压,电流等基本电学概念,阻容感元件的内涵, 电路基本定律。这是分析后续复杂电路的基础。
2. 模拟电路: 二极管、三极管等半导体器件的应用及性质,现在是 IC 流 行的年代,已经没有人去用管子搭建复杂的电路,一是复杂,二是难调试,但是 在很多场合,你就会发现一个二极管,一个三极管或是一个稳压管比 IC 是多么 的有效和方便。 再有就是运算放大器的应用,这个是模拟电路(针对电子专业) 的应用核心,运放的应用极为广泛:同反相放大、限幅电路、峰值电路、滤波器、 IV、VI 变换、振荡器等很多关键的应用领域都有运放的身影。所以模拟电路大 家一定要掌握。
8. 总线接口:这个就是我们要“表演”的,呵呵。总线非常之多,无处不 在,电子也因为接口技术而精彩纷呈。看看我们周围的总线:串行 RS232,RS485 总线,USB 总线,1394 总线,并行接口,CAN 总线,TCP/IP 总线,以太网,单总 线,IIC 总线,SPI 总线......不胜枚举。可以说每一个 IC 器件都实际上是一种 总线的体现。 比如:大家手里的 51 学习板上的 DS1820 温度传感器就是单总线 的,USB 开发板就是 usb 接口的,AT24C02 就是 IIC 的,AT93C46 就是 spi 的, 串口就是 232 的,以及我们要进行的 CAN 总线。这些都无处不在,可以说你的接 口设计能力强基本就能代表你的水平了。设想一下,当你可以根据需要随便设计 你的系统接口时,你的设计能力是多么高。比如开发一个仪器,觉得 USB 方便, 那就直接 USB 接口,通过网络可以 internent 控制,那就以太接口,要个多点通 讯的,选择 can,所以你会发现当你学会了单片机或是 FPGA 之后,总线以及接 口的学习将会成为你的主要学习领域。 以上稍微讲了一些,写了现今应用广泛 的几个大的领域,并不是很全面具体,但是终归给我们一个全貌。我们这次 CAN 总线助学就是针对目前应用最为广泛之一的 can 总线来和大家一起学习。在工程 项目中,大家经常采用 RS232,RS485 通讯方式,是因为它们简单!但是当你学 会了 CAN 总线后,就知道 CAN 总线比它们更简单!你会在以后的设计中毫不犹豫 的采用 CAN 总线作为通讯方式!我们的口号是:大家一起来体会 CAN 总线的简单 可靠吧!
HC6800 V3.0原理图(电路图)

J p 2 5 9 5 (传 入并 出)锁 存器 输出 接口 ,这 两个 接口 需要 用排 线连 接
U4 JP2 1 2 3 4 5 6 7 8 V CC 16 15 1 2 3 4 5 6 7 9 V CC QA QB QC QD QE QF QG QH QH' OE RCLK SRC LR SRC LK SER 13 12 10 11 14 GND P35 V CC P36 MO SIO P34 MO SIO JP595 1 2
U 13 D0 D1 D2 D3 D4 D5 D6 D7 OE LE 74573 Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7 V CC GND 19 18 17 16 15 14 13 12
R20 R 21 100R R22 R23 R24 R 25 R26 R27
D11 D12 D13 D14 D15 D16 D17 D18
20 V CC 10 GND V CC RJ5(12864) 502 * * 502 P0[0: 7]
J21 RJ6( 1602)
5轴步进电机
蜂鸣器
中央控制器(CPU)
实时时钟(DS1302)
B ATT+
滤波电容
EEPROM 74HC138 74HC595 的 滤波 电容
1 2 3 4 5
PY1.0 VCC PY1.2 PY1.3 PY1.1 6 5 U15C 4 U15B V CC 1 2 3 4 5 6 7 8 U15E GND 12 U15F 13 P1.5 2 U15A 8 U15D 10 11 P1.4 VCC 9 3 P1.1 P1.2 BEEP(P1.5)
V CC V CC
上 拉电 阻
RP 5A 4 3 2 1 4 3 2 1 P00 P01 P02 P03 P04 P05 P06 P07 A1 32. 768