舵机基础知识
舵机基础知识单选题100道及答案解析
舵机基础知识单选题100道及答案解析1. 舵机主要用于()A. 控制速度B. 改变方向C. 增加动力D. 稳定平衡答案:B解析:舵机的主要作用是改变方向。
2. 舵机通常由()驱动。
A. 直流电机B. 步进电机C. 伺服电机D. 交流电机答案:C解析:舵机通常由伺服电机驱动。
3. 舵机的控制信号一般是()A. 模拟信号B. 数字信号C. 脉冲信号D. 正弦信号答案:C解析:舵机的控制信号一般是脉冲信号。
4. 舵机的转动角度取决于()A. 电压大小B. 电流大小C. 脉冲宽度D. 脉冲频率答案:C解析:舵机的转动角度取决于脉冲宽度。
5. 常见的舵机旋转角度范围是()A. 0 - 90 度B. 0 - 180 度C. 0 - 270 度D. 0 - 360 度答案:B解析:常见舵机的旋转角度范围是0 - 180 度。
6. 舵机的精度主要取决于()A. 电机性能B. 齿轮精度C. 控制电路D. 以上都是答案:D解析:舵机的精度受到电机性能、齿轮精度和控制电路等多方面因素的影响。
7. 以下哪种不是舵机的应用场景()A. 机器人关节B. 无人机姿态控制C. 汽车发动机D. 模型飞机方向控制答案:C解析:汽车发动机不是舵机的应用场景。
8. 舵机的响应速度主要与()有关。
A. 电机转速B. 齿轮比C. 控制算法D. 以上都是答案:D解析:舵机的响应速度与电机转速、齿轮比和控制算法等都有关系。
9. 为了提高舵机的扭矩,可以()A. 增加电压B. 减小齿轮比C. 使用更大功率的电机D. 以上都是答案:D解析:增加电压、减小齿轮比、使用更大功率的电机都可以提高舵机的扭矩。
10. 舵机在工作时发热的主要原因是()A. 电流过大B. 摩擦损耗C. 电机效率低D. 以上都是答案:D解析:电流过大、摩擦损耗、电机效率低等都会导致舵机工作时发热。
11. 以下哪种舵机的精度较高()A. 塑料齿轮舵机B. 金属齿轮舵机C. 数字舵机D. 模拟舵机答案:C解析:数字舵机的精度通常较高。
船舶舵机的结构组成和特点

船舶舵机的结构组成和特点
船舶舵机是船舶控制系统的重要组成部分,负责控制船舶航向。
本文将介绍船舶舵机的结构组成和特点。
1. 基本组成
船舶舵机主要由以下几个部分组成:
●舵机控制器:接收来自船舶控制系统(如自动舵)的信号,控制舵机的动
作。
●传动机构:将舵机控制器输出的力或扭矩传递到舵杆上,驱动舵面转动。
●驱动电机:提供动力,使传动机构和舵面转动。
●位置反馈装置:检测舵面的位置,将信号反馈给舵机控制器,实现闭环控
制。
●电源和控制系统:为舵机提供电力和控制系统。
2. 舵机类型
船舶舵机根据工作原理可分为两类:
●电液舵机:使用液压油作为工作介质,通过油缸的伸缩驱动舵杆转动。
电
液舵机具有较大的输出力和扭矩,适用于大型船舶。
●电动舵机:使用电动机作为动力源,通过减速器或链条驱动舵杆转动。
电
动舵机具有结构简单、维护方便的优点,但输出力和扭矩相对较小,适用于中小型船舶。
3. 特点
船舶舵机的主要特点如下:
●高输出力矩:能够提供足够的力矩驱动舵面转动,实现船舶航向的改变。
●高可靠性:能在恶劣的环境条件下稳定工作,保证船舶航行的安全。
●良好的控制性能:通过控制系统能够实现精确的航向控制。
●易于维护:结构简单,维护方便,降低了运营成本。
舵机的控制方式和工作原理介绍

舵机的控制方式和工作原理介绍舵机是一种常见的电动执行元件,广泛应用于机器人、遥控车辆、模型飞机等领域。
它通过电信号控制来改变输出轴的角度,实现精准的位置控制。
本文将介绍舵机的控制方式和工作原理。
一、舵机的结构和工作原理舵机的基本结构包括电机、减速装置、控制电路以及输出轴和舵盘。
电机驱动输出轴,减速装置减速并转动输出轴,而控制电路则根据输入信号来控制电机的转动或停止。
舵机的主要工作原理是通过PWM(脉宽调制)信号来控制。
PWM信号是一种周期性的方波信号,通过调整占空比即高电平的时间来控制舵机的位置。
通常情况下,舵机所需的控制信号频率为50Hz,即每秒50个周期,而高电平的脉宽则决定了输出轴的角度。
二、舵机的控制方式舵机的控制方式主要有模拟控制和数字控制两种。
1. 模拟控制模拟控制是指通过改变输入信号电压的大小,来控制舵机输出的角度。
传统的舵机多采用模拟控制方式。
在模拟控制中,通常将输入信号电压的范围设置在0V至5V之间,其中2.5V对应于舵机的中立位置(通常为90度)。
通过改变输入信号电压的大小,可以使舵机在90度以内左右摆动。
2. 数字控制数字控制是指通过数字信号(如脉宽调制信号)来控制舵机的位置。
数字控制方式多用于微控制器等数字系统中。
在数字控制中,舵机通过接收来自微控制器的PWM信号来转动到相应位置。
微控制器根据需要生成脉宽在0.5ms至2.5ms之间变化的PWM信号,通过改变脉宽的占空比,舵机可以在0度至180度的范围内进行精确的位置控制。
三、舵机的工作原理舵机的工作原理是利用直流电机的转动来驱动输出轴的运动。
当舵机接收到控制信号后,控制电路将信号转换为电机驱动所需的功率。
电机驱动输出轴旋转至对应的角度,实现精准的位置控制。
在舵机工作过程中,减速装置的作用非常重要。
减速装置可以将电机产生的高速旋转转换为较低速度的输出轴旋转,提供更大的扭矩输出。
这样可以保证舵机的运动平稳且具有较大的力量。
四、舵机的应用领域舵机以其精准的位置控制和力矩输出,广泛应用于各种领域。
【精品】船舶舵机基础知识(可编辑
测,实现接近该理想模型的控制规律。 说明:具体
工作原理分析需 要较深基础知识。 因此,本节只做 一般了解。
[第四节要点]:自适应舵的概念一节:舵机的分类、特点;基本要求。 第二节:操舵方式(种类、原理);自动操舵仪
原因:装载不对称,斜向风的持续影响,斜向海潮的持 续影响。—— 对于具有双螺旋桨推进的船舶,螺旋桨推进 的不平衡也会产生不对称偏航。
积分环节工作原理:积分环节可以对偏航持续时间进行 累积,当某舷(侧)偏航持续的时间比另一舷(侧)持续时 间长时,通过环节输出的信号(偏舵角)将继续保持,这个 信号将通过执行机构使舵叶维持在一定的偏转角度上,从而 使船舶具有克服单向偏航的能力。
定义:通过计算机将所有检测信号进行 处理,使舵机按照给定航线进行操舵的自动 舵称为自适应舵。自适应舵可以自动对航线 进行判别,可以自动修正内部参数(例如比 例系数等)以适应船舶的各种状态或海况。
分类:——可分为两类 自校正自适应控制系统和模 型参考自适应控制系统。
自适应舵说明
自校正控制系统: 自动校正系统的控制参数,使性能指标接近最优。
三种基本类型:⑴.比例舵;⑵.比例 - 微分舵;⑶.比例 - 微分 - 积分舵。
说明:不同基本类型的自动舵,对舵 叶的调节规律是不同的。
偏航与操舵
自动舵方框图
比例舵
比例舵操舵的规律是:偏舵角β的大小与偏航 角φ的大小成比例关系,即:
β= - K1φ 其中:K1为比例系数,负号表示与偏航方向相反。
特点:机构简单,航行保持精度较差,船舶营 运经济性较差(会出现S形航迹)。
时针方向转动,使舵叶向右偏转。
同时舵角反馈同步传递机构带动
舵机知识分享
舵机知识分享一,舵机的分类1,按照舵机的工作信号来分类:航模舵机有数码舵机Digital Servo,模拟舵机Analog Servo。
(1)数码舵机是数字传输(数字舵机Digital Servo),灵活方便、可靠、兼容性好,抗干扰能力强,可方便实现双向通信,是必然的趋势;(2)模拟舵机是现有的PWM模拟传输(模拟舵机Analog Servo),即脉宽的变化直接代表控制矢量,容易受干扰;2,按照舵机的工作电压来分类:普通电压舵机(4.8-6V),高压舵机HV SERVO (6-7.4V);高压舵机HV SERVO(9.4-12V)。
高压舵机是工作电压高在6-7.4V;9.4-12V(以后高压舵机的工作电压应该还会更高的),高压舵机的优点就是发热小,反应更灵敏,扭力更大。
3, 按照是否防水来分类:全防水舵机,普通舵机。
(全防水舵机的视频)4,机器人专用舵机与模型舵机的区别机器人用的大部分舵机和模型舵机都是一样的,只是航模用舵机限制转角,一般是90-270°,有些机器人舵机的工作角度到达360度,360度舵机一般都是用到机器人上的。
二,舵机的结构(舵机的结构视频)1,外壳:外壳材料有金属,塑料,半金属半塑料三种。
(全金属外壳舵机,半金属半塑料外壳舵机,塑料外壳舵机)2,马达: 无刷马达,空心杯马达,铁心马达。
(无刷马达舵机,空心杯马达舵机,铁芯马达舵机)3,齿轮套件:舵机的齿轮材料(Gear Material)有塑料和金属之区分,金1 / 2属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。
4,动力输出轴:(1),动力输出轴材料有塑料和金属之分,大扭力的一般都采用金属材料。
(2),标准舵机的输出轴的齿数有以下三种:25T(FUTABA品牌的舵机),24T (HITEC品牌的舵机),23T (JR品牌的舵机)。
这个参数主要用来匹配舵臂的,因为常规舵臂的齿数也是:25T (FUTABA),24T(HITEC),23T(JR)这三种,只有舵机轴的齿数和舵臂的齿数一样才能使用。
舵机知识

舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。
如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。
舵机是一种俗称,其实是一种伺服马达。
舵机最早出现在航模运动中。
在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。
举个简单的四通飞机来说,飞机上有以下几个地方需要控制:1.发动机进气量,来控制发动机的拉力(或推力);2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动;3.水平尾舵面,用来控制飞机的俯仰角;4.垂直尾舵面,用来控制飞机的偏航角;遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。
舵机因此得名:控制舵面的伺服电机。
不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。
由此可见,凡是需要操作性动作时都可以用舵机来实现。
一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
舵机的基本结构是这样,但实现起来有很多种。
例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。
例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。
需要根据需要选用不同类型。
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。
较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。
滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。
舵 机

5. 为了防止海浪冲击,设防浪阀。
二. 阀控型液压舵机
采用单向定量油泵,油液进转舵油缸的方向由换向阀 的换向实现。 优点:结构简单,造价低。缺点:换向阀换向,液压 冲击较大,可靠性也较差。主泵始终处于最大流量, 因而,经济性较差。
第三节 液压舵机的转舵机构
可分为:往复式和回转式。 一. 往复式转舵机构 见图
2. 滚轮式转舵机构 见图
M zQR 0 m
4
D zp cos R 0 m
2
3. 摆缸式转舵机构 图示
如忽略角,则摆缸式与滚轮式的扭矩特性基本相同。
二. 回转式转舵机构 图示
M zpAR 0 m
特点: (1). 占地小,安装方便; (2). 无需外部润滑,管理简便。转舵时舵杆不受 侧推力,可减轻舵承磨损。 (3). 扭矩一般。 (4). 内漏严重。
第五节 舵机液压系统实例 一. 泵控型舵机液压系统
图示为国产舵机。 1. 工况选择 缸阀、旁通阀、泵阀的开启原则:只要泵正常,泵阀 应全开,选择那一缸,该缸阀开,同时旁通阀关,如 停用该缸,则该缸旁通阀开,而缸阀关。 单泵四缸: 双泵四缸: 单泵双缸:其中一缸有问题,则选择排除对角布置的方 案。
2. 主油路的锁闭: 作用:锁闭油路,防止跑舵;锁闭备用泵油路,防止 倒灌。 3. 补油、放气、压力保护 补油:辅泵3、减压阀7、单向阀8 放气:油路位置最高处。 压力保护:阀15A, 15B,防止电机过载及防浪。 4. 辅泵的作用: 补油、润滑主油泵、冷却。
各阀件的作用介绍: 1. 油路锁闭阀2:锁闭油缸油路、同时锁闭备用油路。 2. 溢流节流阀4:调节移动速度。 3. 液控旁通阀8:工作时截止(由单向阀6提供压力),而当 油泵不能排油,或油路发生故障时,自动接通油缸两 侧油路,不影响其它控制方式及时投入使用。
舵机的工作原理
舵机的工作原理舵机是一种常用的电机驱动装置,广泛应用于机器人、无人机、航模、机械臂等领域。
它的主要作用是控制机械装置的角度或位置,实现精确的运动控制。
在本文中,我们将详细介绍舵机的工作原理。
一、舵机的基本结构舵机主要由电机、减速机、控制电路和反馈装置组成。
1. 电机:舵机通常采用直流电机或无刷电机作为驱动源。
电机的转动产生动力,驱动舵机的输出轴运动。
2. 减速机:舵机的减速机主要由齿轮组成,通过减速比将电机的高速转动转换为输出轴的低速高扭矩转动。
3. 控制电路:舵机的控制电路是舵机的核心部分,它接收外部的控制信号,并根据信号的脉宽来控制舵机的角度或位置。
4. 反馈装置:舵机通常内置有位置反馈装置,如光电编码器或霍尔传感器,用于实时监测输出轴的位置,并将信息反馈给控制电路,以实现闭环控制。
二、舵机的工作原理舵机的工作原理可以简单概括为:接收控制信号→解码信号→驱动电机→输出轴运动→反馈装置监测位置→控制电路调整驱动信号。
1. 接收控制信号:舵机通过接收外部的控制信号来确定输出轴的位置。
控制信号通常采用脉冲宽度调制(PWM)信号,脉宽的变化对应着不同的角度或位置。
2. 解码信号:控制电路接收到控制信号后,会对信号进行解码,提取出脉宽信息。
3. 驱动电机:解码后的信号被送入舵机的驱动电路,驱动电路根据信号的脉宽信息来控制电机的转动。
通常情况下,舵机的驱动电路采用H桥电路来实现正反转和速度控制。
4. 输出轴运动:驱动电机的转动通过减速机传递给输出轴,使得输出轴按照设定的角度或位置运动。
5. 反馈装置监测位置:舵机内置的反馈装置会实时监测输出轴的位置,并将位置信息反馈给控制电路。
6. 控制电路调整驱动信号:控制电路根据反馈装置提供的位置信息,与输入信号进行比较,如果输出轴的位置与设定位置不一致,控制电路会调整驱动信号,使输出轴逐渐接近设定位置,实现闭环控制。
三、舵机的特点和应用舵机具有以下几个特点:1. 高精度:舵机能够实现较高的角度或位置控制精度,通常可以达到数度甚至更小的角度。
舵机

2020/4/25
主讲 赵伟
5
在近代船舶上常装设侧推装置,以提高低速航行时的操
纵性能,侧推效果与航行速度有关。低速时,侧推效果 较好,可能产生的转船力矩MC=PT·L1在喷射水柱后侧产 生的低压区,效率损失不大。在高速时,侧推效果较差,
喷射水柱后侧产生的低压区将产生明显的效率损失。
当在船舶首尾装设侧推装置 时(分别称为首推器和尾推器), 若两者向相反方向同时发出侧 推力,则可使船舶绕重心原地 转向。
可以有效地代替船舶舵 的功能,使船舶灵敏地 转向和倒航,具有良好 的操纵机动性能
目前已经被大量应用在 各种拖船,工程船舶和 各种特殊船舶上。
主讲 赵伟
8
(二)对舵机的基本要求
1、满足船舶操纵性能要求
舵机应能保征足够大的转舵力矩,在任何航行条件 下,确保正常工作。在最大航速时,能够将舵转动 到最大舵角位置。
其它附件有舵角指示器,压力表,温度表等。
2020/4/25
主讲 赵伟
12
2020/4/25
主讲 赵伟
13
(四)舵机的类型
按动力来源分,舵机有人力机械操纵舵机,手动液压舵机(动
力为人力,利用油液传递动力)、蒸汽舵机、电动舵机和电动液 压舵机(油泵机组将电动机电能转化为液压能,并依靠液压能进 行转舵,简称液压舵机)等五种。
曾在中,小型船舶上使用,转舵力矩一般不大于160kN·m。 中间采用蜗杆蜗轮减速传动机构。
2020/4/25
主讲 赵伟
15
2020/4/25
主讲 赵伟
16
电动机械式舵机
用一个大齿圈代替扇形 齿弧,使舵能够左右转 动更大的角度,用于主 动舵。
舵柱可左右转动90(即 2X 90)。电动机通过齿 轮传动两对蜗杆蜗轮, 并由两个对称的小齿轮 同时将转舵力矩传递到 与舵柱直接连接的大齿 圈上。传递力矩的机件 受力小均衡。
舵机速度控制原理

舵机速度控制原理舵机是一种常见的电机,主要用于控制机器人、模型船、飞机等设备的运动。
舵机速度控制是控制舵机转动速度的一种技术,可以实现精确的运动控制。
本文将详细介绍舵机速度控制原理。
一、舵机基础知识1. 舵机结构舵机由电机、减速器、位置反馈装置、控制电路和输出轴组成。
其中,电机通过减速器将高速旋转转换为低速高扭矩输出,位置反馈装置可以测量输出轴位置,并将其反馈给控制电路,从而实现精确的位置控制。
2. 舵机工作原理当输入PWM信号时,舵机会根据信号占空比来确定输出轴的位置。
PWM信号周期一般为20ms,占空比范围为0-100%。
当占空比为0%时,输出轴处于最左侧;当占空比为50%时,输出轴处于中心位置;当占空比为100%时,输出轴处于最右侧。
二、舵机速度控制原理1. PWM信号频率与周期PWM信号频率指每秒钟PWM信号重复出现的次数。
PWM信号周期指PWM信号一次完整的周期所需要的时间。
一般来说,PWM信号频率越高,控制精度越高,但同时也会增加计算负担和电路复杂度。
PWM信号周期越短,输出轴转动速度就越快。
2. 舵机速度控制方法舵机速度控制可以通过改变PWM信号占空比来实现。
当占空比较小时,输出轴转动速度较慢;当占空比较大时,输出轴转动速度较快。
因此,可以通过改变PWM信号占空比的大小来控制舵机的转动速度。
3. 舵机加减速控制方法为了实现更加精确的运动控制,可以采用舵机加减速控制方法。
该方法主要分为两个阶段:加速阶段和匀速阶段。
在加速阶段中,PWM信号占空比逐渐增大,输出轴转动速度逐渐增快;在匀速阶段中,PWM信号占空比保持不变,输出轴转动速度保持恒定。
当需要停止时,则采用减速阶段,在该阶段中PWM信号占空比逐渐减小,输出轴转动速度逐渐减慢,直到停止。
三、舵机速度控制电路设计1. 舵机速度控制电路原理图舵机速度控制电路主要由PWM信号发生器、加减速电路、H桥驱动电路和舵机组成。
其中,PWM信号发生器用于产生PWM信号;加减速电路用于实现舵机加减速控制;H桥驱动电路用于控制输出轴的转向;舵机则是被控制的对象。
舵机的工作原理
舵机的工作原理舵机是一种常见的电机控制装置,广泛应用于机器人、无人机、航模等领域。
它的主要功能是控制机械装置的角度或位置,使其按照预定的路径运动。
本文将详细介绍舵机的工作原理,包括舵机的构造、工作原理、控制信号以及常见问题解决方法。
一、舵机的构造舵机主要由电机、减速器、位置反馈装置和控制电路组成。
1. 电机:舵机采用直流电机或无刷电机作为驱动力源。
直流电机通常由电刷和电枢组成,通过电流和磁场相互作用产生转矩。
无刷电机则通过电子控制器控制电流和磁场来产生转矩。
2. 减速器:舵机的电机输出轴通过减速器与舵机的输出轴相连,减速器主要用于降低电机的转速并增加输出的扭矩。
常见的减速器类型有齿轮减速器和行星减速器。
3. 位置反馈装置:舵机的位置反馈装置用于测量舵机输出轴的角度或位置,并将其反馈给控制电路。
常见的位置反馈装置有旋转电位器、霍尔传感器和光电编码器等。
4. 控制电路:舵机的控制电路根据输入的控制信号,通过控制电机的电流和方向来控制舵机输出轴的角度或位置。
控制电路通常由微控制器或专用的舵机控制芯片组成。
二、舵机的工作原理舵机的工作原理可以简单分为两个阶段:位置检测和位置控制。
1. 位置检测:舵机的位置检测是通过位置反馈装置实现的。
当舵机接收到控制信号后,控制电路会将电流传递给电机,驱动电机旋转。
同时,位置反馈装置会不断监测输出轴的角度或位置,并将其反馈给控制电路。
2. 位置控制:控制电路根据位置反馈装置的反馈信号,与输入的控制信号进行比较,计算出误差值。
然后,控制电路会根据误差值调整电机的电流和方向,使输出轴逐渐接近目标位置。
当输出轴达到目标位置时,控制电路会停止调整电流,舵机保持在目标位置。
三、舵机的控制信号舵机的控制信号通常是一个脉冲宽度调制(PWM)信号。
PWM信号的周期一般为20毫秒,其中高电平的脉冲宽度决定了舵机的角度或位置。
舵机的控制信号一般具有以下特点:1. 脉冲周期:舵机的控制信号周期一般为20毫秒,即每个脉冲的时间间隔为20毫秒。
舵机的工作原理

舵机的工作原理引言概述:舵机是一种常用的电动执行器,广泛应用于机器人、航模、车模等领域。
它通过接收控制信号,能够精确控制输出轴的角度位置,从而实现对机械装置的精确控制。
本文将详细介绍舵机的工作原理。
正文内容:1. 舵机的基本组成1.1 电机部分:舵机采用直流电机作为驱动力源,通常为核心电机或无刷电机。
1.2 减速器:舵机的输出轴通常需要具备较大的输出力矩,因此采用减速器来降低电机的转速并增加输出力矩。
1.3 位置反馈装置:为了实现准确的位置控制,舵机内部配备了位置反馈装置,通常是一种旋转式的电位器或编码器。
2. 舵机的工作原理2.1 控制信号解码:舵机接收到控制信号后,首先需要将信号进行解码,通常采用脉宽调制(PWM)信号。
2.2 位置反馈:舵机通过位置反馈装置获取当前输出轴的角度位置,并与控制信号进行比较,以确定需要调整的角度。
2.3 控制电路:舵机内部的控制电路根据控制信号和位置反馈的差异,通过控制电流的大小和方向,驱动电机旋转到目标位置。
2.4 闭环控制:舵机通过不断地进行位置反馈和调整,实现闭环控制,使输出轴能够精确地停留在目标位置。
3. 舵机的工作特点3.1 高精度:舵机通过位置反馈和闭环控制,能够实现高精度的角度控制,通常误差在几度以内。
3.2 高输出力矩:舵机通过减速器的作用,能够提供较大的输出力矩,适用于需要承受一定负载的应用场景。
3.3 快速响应:舵机的控制电路响应速度较快,能够在短时间内调整到目标位置。
4. 舵机的应用领域4.1 机器人:舵机广泛应用于机器人的关节驱动,能够实现机器人的灵活运动和精确控制。
4.2 航模:舵机用于控制航模的翼面、尾翼等部件,实现飞行姿态的调整。
4.3 车模:舵机用于控制车模的转向和油门,实现车辆的前进、后退和转向。
总结:舵机作为一种常见的电动执行器,通过接收控制信号和位置反馈,实现对输出轴角度位置的精确控制。
它具备高精度、高输出力矩和快速响应的特点,在机器人、航模、车模等领域有着广泛的应用。
第九章舵机_船舶辅机

9-1概述
操舵装置: 动力设备:原动机 转舵机构(舵机) :使舵叶转动的油缸等 遥控(远操)机构:控制舵叶转动的操纵机构。
9-1-1舵设备的组成和舵的类型
舵杆和舵销保持同一轴线。
9-1-1舵设备的组成和舵的类型
舵的类型
不平衡舵图9-1(a) 舵杆轴线紧靠舵叶前缘的舵 平衡舵图9-1(b) 舵杆轴线位于舵叶前缘后面一 定位置的舵 半平衡舵图9-1(c) 仅于下半部做成平衡型式的舵 后两种舵在舵杆轴线之前有一定的舵叶面积,转 舵时水流作用在它上面产生的扭矩可以抵消一部 分轴线后舵叶面积上的扭矩,从而减轻舵机的负 荷。 复板舵:对称机翼型、空心结构。
9-1-2-1舵的水动力及其对船舶的影响
– F2则又可分解为R和T两个分力 – 纵向分力R=F2sinα,增加了船舶前进的阻力 – 横向分力T=F2cos α ,使船向偏舵的相反方向 漂移。 • 水作用力F与船舶的重心G并不在同一水平面上。 – 船在转向的同时,还存在着横倾与纵倾力矩。
9-1-2-2舵的转船力矩
安全阀设置、安装位置 能够被隔断的任何部分、 由于动力源或外力作用能够产生压力的任 何部分。 参数选定 开启压力≮1.25倍最大工作压力,且不超 过设计压力; 排量≮泵总流量的110%, 低温黏度影响后,压力升高≯开启压力的 10%。
9-1-2对舵机的基本技术要求
4.液压系统 应设滤油器、循环油箱、低油位报警器。 应设带有液位计的贮油箱。容量满足上 述要求。 应设检修用隔离阀,放气阀。
公称转舵扭矩:最深航海吃水、最大航速、 最大舵角时所需的扭矩。
9-1-2舵的水动力矩和转舵力矩
MS
Mmax (1)转船力矩MS比水动力 矩Ma大的多,但都与A 和v2成正比,随舵角增 大而增大。
舵机的工作原理

舵机的工作原理舵机是一种常见的电子元件,广泛应用于模型、机器人、无人机等领域中,用于控制物体的转动角度。
在这篇文档中,我们将介绍舵机的工作原理及其基本结构。
一、舵机的基本结构舵机通常由电机、减速机、位置反馈器和控制电路构成。
其中,电机负责转动输出轴,减速机将电机的高速旋转转换为高扭矩低速旋转,并通过位置反馈器不断监测转动角度与设定角度之间的差异。
控制电路则根据位置反馈信号调整电机的转动来使得转动角度精确到达设定值。
二、舵机的工作原理舵机的工作原理基于PWM(脉宽调制)信号。
PWM信号是一种周期性的脉冲信号,通过改变脉冲的高电平时间来实现对舵机的角度控制。
每个PWM周期中,脉冲的高电平时间决定了舵机输入的控制信号。
当控制信号的高电平时间较短时,舵机反应为将输出轴转动到最小角度。
类似地,高电平时间较长时,舵机反应为将输出轴转动到最大角度。
而当控制信号的高电平时间等于脉冲周期时,舵机会将输出轴转动到中立位置。
舵机的转动角度范围由其结构和控制电路决定。
通常,舵机的转动角度在90°至180°之间,具体取决于制造商的设计及型号。
三、舵机的工作模式1. 位置控制模式位置控制模式是舵机最常用的工作模式,也是其主要功能之一。
在位置控制模式下,舵机根据控制信号的脉宽来确定目标角度,并通过反馈机制实现精确的角度控制。
这种模式适用于需要精确控制转动角度的应用场景,如模型飞机的舵面控制、机器人的关节控制等。
2. 速度控制模式速度控制模式是舵机的一种特殊工作模式。
在此模式下,舵机通过控制信号的脉宽来确定目标转速,而非具体的转动角度。
这种模式常用于需要旋转运动的应用中,在无人车、机器人导航等领域有广泛应用。
3. 扭矩控制模式扭矩控制模式是舵机的另一种特殊工作模式。
在这种模式下,舵机通过控制信号中的脉宽来调整输出扭矩的大小。
这种模式常用于需要精确控制扭矩大小的应用场景,如机器人抓取物体、模型车辆的爬坡能力等。
舵机选型手册
舵机选型手册舵机选型手册是为了帮助用户在选择合适的舵机时提供相关参考内容和指导。
以下是一些可能包含在舵机选型手册中的参考内容:1. 舵机基础知识:- 介绍舵机的工作原理和基本结构,包括电机、减速装置和反馈机构等。
- 解释舵机的主要参数,如转速、转矩、分辨率、工作电压范围等。
2. 应用场景分析:- 分析不同的应用场景对舵机性能的要求,如机器人、航空模型、智能家居等。
- 针对不同场景,提供合适的舵机类型的推荐,如普通模型舵机、数字舵机、连续旋转舵机等。
3. 舵机性能指标:- 强调转矩和转速对于舵机性能的重要性,并提供不同应用场景下的合理取舍建议。
- 讨论舵机的响应速度和精度,以及相应的测试方法和标准。
4. 环境因素考虑:- 介绍环境因素对舵机性能的影响,如温度、湿度、振动等。
- 提供选择能够适应恶劣环境的特殊舵机的建议,如防水、防尘、防震等功能。
5. 能源管理与控制系统:- 分析舵机的功耗和电流要求,建议合适的电源供应和能源管理方案。
- 探讨不同的控制系统,如PWM、PPM、SerialBus等,并提供相应的舵机推荐。
6. 可靠性和寿命考虑:- 介绍舵机的寿命和可靠性,并讨论其与材料质量、工艺水平和设计技术的关系。
- 提供购买舵机时对其品牌声誉、生产商信誉和客户评价的参考依据。
7. 成本效益评估:- 提供在舵机选择过程中综合考虑性能、质量、价格和保修等因素的建议。
- 探讨在满足需求的前提下,如何选择性价比最高的舵机型号。
8. 实际案例:- 提供一些典型的应用案例,介绍舵机选型的具体过程和经验,以及对应舵机选择的原因和效果评估。
需要注意的是,由于在回答过程中不允许包含链接,因此无法提供具体的参考文献或案例链接。
如果需要更详细和具体的参考信息,建议查阅舵机厂商提供的技术手册、产品规格书、应用指南等相关文档。
舵机常识

舵机是遥控模型控制动作的动力来源,不同类型的遥控模型所需的舵机种类也随之不同。
如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
本文章主要探讨适合各等级直升机各工作部位所使用的舵机,至于其它种类的模型,如飞机、车、船,则不在本篇文章讨论范围之内。
舵机的构造舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机发出讯号给舵机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。
位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
一般的伺服马达是将细铜线缠绕在三极转子上,当电流流经线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。
依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。
舵机为求转速快、耗电小,于是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的五极中空转子,并将磁铁置於圆柱体内,这就是无核心马达。
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。
较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。
滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。
目前新推出的FET 舵机,主要是采用FET(Field Effe ct Transistor)场效电晶体。
F ET 具有内阻低的优点,因此电流损耗比一般电晶体少。
技术规格厂商所提供的舵机规格资料,都会包含外形尺寸(mm)、扭力(kg-cm)、速度(秒/60°)、测试电压(V)及重量(g)等基本资料。
扭力的单位是kg-c m,意思是在摆臂长度 1 公分处,能吊起几公斤重的物体。
这就是力臂的观念,因此摆臂长度愈长,则扭力愈小。
舵机知识总结和注意点(自我总结)
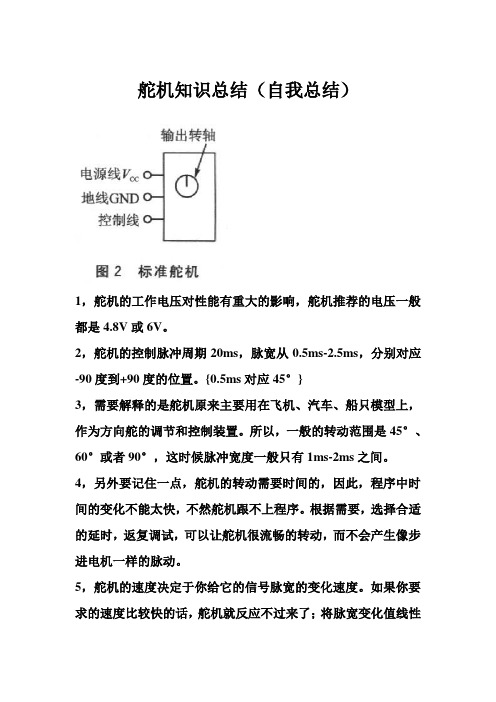
舵机知识总结(自我总结)1,舵机的工作电压对性能有重大的影响,舵机推荐的电压一般都是4.8V或6V。
2,舵机的控制脉冲周期20ms,脉宽从0.5ms-2.5ms,分别对应-90度到+90度的位置。
{0.5ms对应45°}3,需要解释的是舵机原来主要用在飞机、汽车、船只模型上,作为方向舵的调节和控制装置。
所以,一般的转动范围是45°、60°或者90°,这时候脉冲宽度一般只有1ms-2ms之间。
4,另外要记住一点,舵机的转动需要时间的,因此,程序中时间的变化不能太快,不然舵机跟不上程序。
根据需要,选择合适的延时,返复调试,可以让舵机很流畅的转动,而不会产生像步进电机一样的脉动。
5,舵机的速度决定于你给它的信号脉宽的变化速度。
如果你要求的速度比较快的话,舵机就反应不过来了;将脉宽变化值线性到你要求的时间内,一点一点的增加脉宽值,就可以控制舵机的速度了。
5,前面提到,舵机转角控制需要将两个八位寄存器合成为一个十六位寄存器。
当输入脉冲周期为20ms时,占空比为2.5%时,转角为-90°占空比为5%时,转角为-45°占空比为7.5%时,转角为-0°占空比为10%时,转角为45°占空比为12.5%时,转角为90°附上控制舵机转角90°程序:#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions *///PWM初始化//实现舵机90度转,占空比为12.5%void PWM_Init(void){PWME=0x00; //禁止PWM模块PWMCTL_CON01=1; //0和1联合成16位PWM;PWMCAE_CAE1=0; //选择输出模式为左对齐输出模式PWMPOL_PPOL1=1; //先输出高电平,计数到DTY时,反转电平PWMPRCLK = 0X00; //clockA不分频,clockA=busclock=16MHz;PWMSCLA = 8; //对clock A进行2*8=16分频;pwm clock=clockA/16=1MHz;PWMCLK_PCLK1 = 1; //选择clock SA做时钟源PWMPER01 = 20000; //周期20ms;50Hz;(可以使用的范围:50-200hz)PWMDTY01 = 2500; //高电平时间为2.5ms; 单位1usPWME_PWME1 = 1;}void main(void){/* put your own code here */PWM_Init();while(1);}。
智能车中的舵机入门

单片机控制舵机修改浏览权限 | 删除.什么是舵机:舵机如下所示:有三根线,一般依次是地,电源(5V左右),信号(信号的幅值>=3.3V),不清楚各个脚打开舵机一测量就知道了。
2.其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
3.舵机的控制:舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度伺服为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;重要说明:1:上面部分还是成线形关系的,Y=90X-45(X单位是ms,Y单位是度数:)2:上面所说的0度45度等是指度45度位置(什么意思呢:我说明一下就知道了,就拿45度位置来说,若舵机停在0度位置,下载45度位置程序后则舵机停在45度,即顺时针走了45度,若当时舵机在135度位置,则反转90度到45度位置。
所以舵机不存在正转反转问题。
这点非常重要。
3:若想转动到45度位置,要一直产生1.0ms的高电平(即PA0=1;Delay(1ms);PA0=0;Delay(20ms);要不停的产生这个高低电平,产生PWM脉冲请看下形象描述吧:下面是我在ATMEGA32上的测试程序,开发软件:ICC AVR#include <iom32v.h>typedef struct BYTE_BIT{unsigned BIT0:1;unsigned BIT1:1;unsigned BIT2:1;unsigned BIT3:1;unsigned BIT4:1;unsigned BIT5:1;unsigned BIT6:1;unsigned BIT7:1;}BYTEBIT;#define SET_BIT8_FORMAT(Addr) (*((volatile BYTEBIT *)&Addr)) # define PORTB_BIT SET_BIT8_FORMAT(PORTB)# define _PB0 PORTB_BIT.BIT0# define _PB1 PORTB_BIT.BIT1# define _PB2 PORTB_BIT.BIT2# define _PB3 PORTB_BIT.BIT3# define _PB4 PORTB_BIT.BIT4# define _PB5 PORTB_BIT.BIT5# define _PB6 PORTB_BIT.BIT6# define _PB7 PORTB_BIT.BIT7/*delay(1)延时时间为300USdelay(80)延时时间为20mSdelay(4)延时时间为1mSdelay(8)延时时间为2mSdelay(6)延时时间为1.55mSdelay(2)延时时间为0.55MSdelay(10)延时时间为2.5mS*/void Delay(int j){ int i;for(;j>0;j--){for(i=0;i<35;i++);}}void main(void) {int i,j;DDRB=0XFF;while(1){//2.0ms 135度位置_PB7=1;Delay(8);_PB7=0;Delay(74);/*//1.0ms 45度位置_PB7=1;Delay(4);_PB7=0;Delay(78);//1.5ms 90度位置_PB7=1;Delay(6);_PB7=0;Delay(78);// 2.5ms 180度位置_PB7=1;Delay(10);_PB7=0;Delay(72);//0.5ms 0度位置_PB7=1;Delay(2);_PB7=0;Delay(78);*/}}测试过绝对可以。
舵机知识

DIYer修炼:舵机知识扫盲双向电梯• 1 简介• 2 舵机的结构和原理• 3 选择舵机• 4 舵机的支架和连接装置• 5 如何控制舵机• 6 舵机应用:云台网络摄像头•7 如何DIY连续旋转的舵机•8 连续旋转舵机的应用:5分钟的绘图机器人1 简介舵机控制的机器人● 我猜你肯定在机器人和电动玩具中见到过这个小东西,至少也听到过它转起来时那与众不同的“吱吱吱”的叫声。
对,它就是遥控舵机,常用在机器人技术、电影效果制作和木偶控制当中,不过让人大跌眼镜的是,它竟是为控制玩具汽车和飞机才设计的。
● 舵机的旋转不像普通电机那样只是古板的转圈圈,它可以根据你的指令旋转到0至180度之间的任意角度然后精准的停下来。
如果你想让某个东西按你的想法运动,舵机可是个不错的选择,它控制方便、最易实现,而且种类繁多,总能有一款适合你呦。
● 用不着太复杂的改动,舵机就可摇身一变成为一个高性能的、数字控制的、并且可调速的齿轮电机。
在这篇文章中,我会介绍舵机使用的的一些基础知识以及怎样制作一个连续运转舵机。
2 舵机的结构和原理A.标准舵机图解● 遥控舵机(或简称舵机)是个糅合了多项技术的科技结晶体,它由直流电机、减速齿轮组、传感器和控制电路组成,是一套自动控制装置,神马叫自动控制呢?所谓自动控制就是用一个闭环反馈控制回路不断校正输出的偏差,使系统的输出保持恒定。
我们在生活中常见的恒温加热系统就是自动控制装置的一个范例,其利用温度传感器检测温度,将温度作为反馈量,利用加热元件提输出,当温度低于设定值时,加热器启动,温度达到设定值时,加热器关闭,这样不就使温度始终保持恒定了吗。
B.闭环反馈控制● 对于舵机而言呢,位置检测器是它的输入传感器,舵机转动的位置一变,位置检测器的电阻值就会跟着变。
通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。
图A显示的是一个标准舵机的部件分解图。
图B显示的是舵机闭环反馈控制的工作过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
舵机基础知识:最近几年国内机器人开始起步发展,很多高校、中小学都开始进行机器人技术教学。
小型的机器人、模块化的机器人、组件式的机器人是教学机器人的首选。
在这些机器人产品中,舵机是最关键,使用最多的部件。
根据控制方式,舵机应该称为微型伺服马达。
早期在模型上使用最多,主要用于控制模型的舵面,所以俗称舵机。
舵机接受一个简单的控制指令就可以自动转动到一个比较精确的角度,所以非常适合在关节型机器人产品使用。
仿人型机器人就是舵机运用的最高境界。
一、舵机的结构舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。
能够利用简单的输入信号比较精确的转动给定角度的电机系统。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文servo。
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路。
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机的外壳一般是塑料的,特殊的舵机可能会有金属铝合金外壳。
金属外壳能够提供更好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。
金属外壳也可以提供更牢固的固定位齿轮箱有塑料齿轮、混合齿轮、金属齿轮的差别。
塑料齿轮成本底,噪音小,但强度较低;金属齿轮强度高,但成本高,在装配精度一般的情况下会有很大的噪音。
小扭矩舵机、微舵、扭矩大但功率密度小的舵机一般都用塑料齿轮,如Futaba 3003,辉盛的9g微舵。
金属齿轮一般用于功率密度较高的舵机上,比如辉盛的995舵机,在和3003一样体积的情况下却能提供13KG的扭矩。
Hitec甚至用钛合金作为齿轮材料,其高强度能保证3003大小的舵机能提供20几公斤的扭矩。
混合齿轮在金属齿轮和塑料齿轮间做了折中,在电机输出齿轮上扭矩一般不大,用塑料齿轮。
二、舵机的规格和选型当今使用的舵机有模拟舵机和数字舵机之分(具体差别见第节),不过数字舵机还是相对较少。
下面的技术规格同时适用与两种舵机。
舵机的规格主要有几个方面:转速、转矩、电压、尺寸、重量、材料等。
我们在做舵机的选型时要对以上几个方面进行综合考虑。
z 转速转速由舵机无负载的情况下转过60°角所需时间来衡量,常见舵机的速度一般在0.11/60°~0.21S/60°之间。
转矩舵机扭矩的单位是K G·CM,这是一个扭矩单位。
可以理解为在舵盘上距舵机轴中心水平距离1CM处,舵机能够带动的物体重量。
电压厂商提供的速度、转矩数据和测试电压有关,在4.8V和6V两种测试电压下这两个参数有比较大的差别。
如Futaba S-9001 在 4.8V 时扭力为 3.9kg、速度为 0.22 秒,在 6.0V 时扭力为 5.2kg、速度为 0.18 秒。
若无特别注明,JR 的舵机都是以 4.8V 为测试电压,Futaba则是以 6.0V 作为测试电压。
舵机的工作电压对性能有重大的影响,舵机推荐的电压一般都是4.8V或6V。
当然,有的舵机可以在7V以上工作,比如12V的舵机也不少。
较高的电压可以提高电机的速度和扭矩。
选择舵机还需要看我们的控制卡所能提供的电压。
z 尺寸、重量和材质舵机的功率(速度×转矩)和舵机的尺寸比值可以理解为该舵机的功率密度,一般同样品牌的舵机,功率密度大的价格高。
塑料齿轮的舵机在超出极限负荷的条件下使用可能会崩齿,金属齿轮的舵机则可能会电机过热损毁或外壳变形。
所以材质的选择并没有绝对的倾向,关键是将舵机使用在设计规格之内。
用户一般都对金属制的物品比较信赖,齿轮箱期望选择全金属的,舵盘期望选择金属舵盘。
但需要注意的是,金属齿轮箱在长时间过载下也不会损毁,最后确是电机过热损坏或外壳变形,而这样的损坏是致命的,不可修复的。
塑料出轴的舵机如果使用金属舵盘是很危险的,舵盘和舵机轴在相互扭转过程中,金属舵盘不会磨损,舵机轴会在一段时间后变得光秃,导致舵机完全不能使用。
综上,选择舵机需要在计算自己所需扭矩和速度,并确定使用电压的条件下,选择有150%左右甚至更大扭矩富余的舵机。
三、模拟舵机及其控制原理舵机是一个微型的伺服控制系统,具体的控制原理可以用下图表示工作原理是控制电路接收信号源的控制脉冲,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
模拟舵机需要一个外部控制器(遥控器的接收机)产生脉宽调制信号来告诉舵机转动角度,脉冲宽度是舵机控制器所需的编码信息。
舵机的控制脉冲周期20ms,宽从0.5ms-2.5ms,分别对应-90度到+90度的位置。
如下图所示:需要解释的是舵机原来主要用在飞机、汽车、船只模型上,作为方向舵的调节和控制装置。
所以,一般的转动范围是45°、60°或者90°,这时候脉冲宽度一般只有1ms-2ms之间。
而后舵机开始在机器人上得到大幅度的运用,转动的角度也在根据机器人关节的需要增加到-90度至90度之间,脉冲宽度也随之有了变化。
对于控制脉冲有的书上讲的是PPM(脉位调制信号),有的定义为PWM(脉宽调制信号)。
准确的讲应该叫什么笔者也没有确定的答案,请恕我才疏学浅。
对与模型遥控器,发射机到接收机之间的信号编码方式是PPM(也有PCM)方式,当然,这个信号的编码传输过程不是接收机到舵机之间,切不可混淆。
对于PPM、PCM在调制信号上面的区别可以看《现代无线通讯》。
对与机器人控制而言,我们一般通过单片机产生PWM信号控制舵机,所以下面对于舵机的控制脉冲都称为PWM信号(一家直言,如若觉得不准确可以来信讨论)。
如果你是爱好者,只是想了解舵机,对于它的控制原理了解到这就可,下面我们将对模拟舵机的具体电路进行分析,需要读者具有初步的模电、数电常识。
我们在网上可以很容易找到Futaba 3003的电路图,如图4.3所示。
PWM由接收通道进入信号解调电路BA6688的12脚,这是周期20ms,脉宽0.5ms-2.5ms之间的PWM信号。
该PWM 信号和内部以5K电位器实际电压为基准的脉冲进行比较,得到的脉冲进行展宽后给H桥,H 桥根据展宽后的脉冲信号驱动电机。
解调后的直流偏置电压和通过电位器得到反馈电压进行比较得到电压差,BA66898根据该电压差通过3脚输送的PWM信号给电机驱动电路BAL6686驱动电机正反转,同时电机转动带动电位器转动,导致比较后的电压差变化,直到电压差为0,电机停止。
查下H-Bridge的驱动信号是脉冲还是什么。
测一下,这个脉冲和电机转动的关系。
叠加在5K的电位器反馈电压之上的还有一个Motor Back EMF,意思是电机反向电动势。
根据电磁感应定律,无论作为电动机还是作为发电机运行,电枢都会产生感应电动势。
发电机中的感应产生的电动势就称为感应电动势,电动机的感应电动势一般称为反电动势。
电动机的感应电动势会和转速成比例变化。
通过搭建桥式伺服电路,可以或许电动机的反电动势,通过和给定的基准电压进行比较,可以实现简单的速度换控制。
3003用这样的方式来进行速度伺服控制,保证舵机的最高速度稳定。
而电位器只是进行点位控制,做简单的位置闭环。
Futaba之外的其它厂家使用的不是BA6688这款IC,一般选择M51660、AA5188、YT5166这些芯片一般没有EMF控制。
控制电路驱动电机的也是利用PWM脉冲,不过此脉冲非彼脉冲,此脉冲占空比是0-100%,周期20ms。
控制电路通过占空比进行调速,通过正反脉冲进行调向。
具体可以看直流电动机控制方面的书籍。
四、数字舵机及其控制原理数字舵机从根本上颠覆了舵机的控制系统设计。
数字和模拟舵机相比在两个方面有明显的优点。
1、防抖。
2、响应速度快。
模拟舵机由于使用模拟器件搭建的控制电路,电路的反馈和位置伺服是基于电位器的比例调节方式。
电位器由于线性度的影响,精度的影响,个体差异性的问题,会导致控制匹配不了比例电压,比如我期望得到2.5V的电压位置,但第一次得到的是2.3V,经过1个调节周期后,电位器转过的位置已经是2.6V了,这样控制电路就会给电机一个方向脉冲调节,电机往回转,又转过头,然后有向前调节,以至于出现不停的震荡,这就是我们所看到的抖舵现象。
我们购买一批舵机会发现有的很好用,有的在空载的时候也会在抖动,有的是在加一定的负载后就开始抖动。
我们不用装出机器人就可以预期一个事实,不停抖动的舵机装出来的仿人机器人是不可能走的很好的,用不停抖动的舵机装出来的机械臂是不可能写字的。
可惜的是,现在的数字舵机还是很贵的,更别提用伺服直流电机+伺服驱动器+运动控制卡搭建的机器人系统了。
模拟舵机的调节周期是20ms(看看模块卡的舵机程序),也就是它的反应时间是20ms。
根据舵机的不同,假设我们估计舵机的速度是0.2s/60°,那么20ms舵机最快的时候转过0.6度才会进行调节,这就是关节在突然出现大负载的情况下,会被扭矩摆动0.6度,然后才纠正回来,我们的直观感觉就是这个舵机不“硬”我们掰动舵盘,可以掰动一个位置。
数字舵机可以以很高的频率进行调节,这个周期和角度会变得非常小,并且有PID调节方式的存在,能够在以很适当的PID参数进行调节,能够让舵机有很高的响应速度,不会出现超调总伺服器舵机:总线伺服舵机实际上可以理解为舵机的衍生品,数字舵机相比与模拟舵机而言是设计上的颠覆,而总线伺服单元对于舵机而言则是在功能和运用上的颠覆。
舵机实际上只能发挥出总线伺服舵机非常微小的部分。
那么什么是总线伺服舵机。
我们先来看一下我们现在使用舵机和数字舵机时遇见的问题。
1、我们利用舵机(不论数字还是模拟)搭建一个仿人机器人,用了20个自由度,用了20个舵机。
每根舵机都要接到控制卡上,有的线还需要延长,所有的线加起来有超过30根,像团海草一样把机器人整个身体缠了个遍,机器人在走动的时候突然发现舵机线被拉松了,机器人一个趔趄把脖子都摔断了。
控制卡上需要做出20个PWM信号接口(我们一直在为这个技术问题发愁,现在或许好一点),那可是长长的一排插针啊。
健忘的我还很容易忘记哪个插针对应哪个舵机,好不容易接上后,一通电,机器人腿转到背后去了,一排查发现腿关节接到肩关节了。