气压位置伺服控制装置设计与实现
哈工大机械设计制造及其自动化专业课程介绍
机械设计制造及其自动化专业课程介绍默认分类 2010-04-24 11:35:19 阅读61 评论0 字号:大中小订阅作者:船舶学院时间:2009-6-16 14:40:51“机电系统计算机控制”教学大纲(PUTER CONTROL OF ELECTRICAL MACHINE SYSTEMS)大纲编制:李哲教研室主任:李哲课程编码:课程名称:机电系统计算机控制教学性质:选修课适用专业:机械及近机类专业学时:30(26/4)学分:1.5一、课程的性质、目的与任务本课程是适应机电一体化的发展趋势而设立的,是机械设计制造及自动化专业的一门主干课程,主要讲述直流电机、交流电机控制系统,液压伺服控制系统和气压传动控制系统,通过这门课让学生掌握机电液气系统的设计和应用。
二、课程的基本要求本课程主要讲授内容有直流、交流电机的组成、原理、动态特性及其应用,液压伺服系统设计与气压传动系统设计;要求学生掌握机电液气系统的组成、分类,分析和设计;了解各自的特点和应用场合;具备分析机电液气系统和设计简单的机电液气系统的能力,为进一步学习深造和适应未来的工作奠定基础。
三、本课程与相关课程的联系与分工相关课程有:电工学、模拟电路、自动控制原理、液压传动;电工学、模拟电路、自动控制原理等课程作为本课程的基础课。
液压传动课程侧重于讲述液压传动系统,本课程侧重于液压控制系统。
四、教学大纲内容使用教材与参考教材1、使用教材:(骆涵秀主编机电控制 XX大学 2000年1月)2、参考教材:(李洪人液压控制系统国防工业)(邓星钟机电传动控制机械工业)(朱善君可编程控制器系统原理应用维护清华大学)五、教学大纲内容及学时分配第一章概述(2)本章主要内容有:分别用实例引出机电、液压、气动控制系统的整体组成,功能和特点;要求学生掌握机电液气系统的组成;了解机电液气系统的发展方向和选用原则。
第二章直流电机(4)本章主要内容有:直流电机的原理,动态特性分析和系统应用;要求学生掌握直流电机的机械特性和系统应用;了解直流电机的原理、组成。
伺服压机设备说明书

伺服压机设备说明书第一部分:安全1-1安全注意事项:生产过程中始终遵守安全注意事项可以防止意外事故及潜在危险的发生!请指定专业人员培训上岗维护,操作设备。
发现问题及时解决,不要使设备带病作业。
压力气泵、真空泵等外协设备工作时,请确保安全可靠。
作业前有必要请您戴好劳保防护用具,确保人身安全与健康。
必须单独使用可靠的接地线,否则有被漏电,静电击打的危险。
各工位运转时严禁调整触摸,否则有卷入切断的危险。
保持气路通排气畅通,否则有放炮爆破的危险。
1-2安全装置的位置:第二部分:操作规程2-1设备概观:©电源总1急停按气源开急停按1 升降门控制气缸2 工装放置底座3 气源控制箱4 升降门5 人机控制界面6 启动控制按钮7 伺服电缸8 三色报警灯9 工作压头10 电源控制柜2-2开机前检查:2-2-1确定主电源与设备需求相一致,单相交流220V。
2-2-2检查气源气压设定是否适当。
2-2-3清理设备上所有工具、污垢、外围材料。
2-3启动/运行/停止:2-3-1闭合断路器,打开主电源开关,打开气源开关。
2-3-2电源指示灯亮,触摸屏显示正常。
根据实际工作情况设定技术参数。
2-3-3双手按启动按钮,直至升降门完全打开。
2-3-4将待压工装放置于工装底座,双手按启动按钮,直至升降门完全关闭。
2-3-5升降门完全关闭后,伺服电缸开始下压动作。
2-3-6压装结束,伺服电缸归位停止后,升降门打开,取出工装,依照2-3-3的流程进行下一次压装。
2-3-7工作过程中,如需临时停止动作,或发生紧急状况,可快速随手按下急停按钮,动作暂停;解除急停后,按复位按钮,可继续工作。
2-4关机:2-4-1关机时,请先关闭主电源再关闭气源。
2-4-2气源关闭时间过长时,升降门会缓慢下降属正常现象。
第三部分:维护与保养3-1每班作业前检查设备所有电路,气路部件有无漏电漏气;各运动部件是否损坏,卡滞,错位并即时修复纠正。
检查各运动部件的螺栓、螺母检查滑动轴承。
PLC位置控制功能在QDC-1气动冲床上的运用

145中国设备工程Engineer ing hina C P l ant中国设备工程 2018.09 (下)1 QDC-1气动冲床介绍QDC-1气动冲床是一款用来进行管状材料两端冲制矩形孔的专机,该专机在机械设计上采用了气动肌腱新技术,利用压缩空气通过大流量气阀控制肌腱机构输出行程和力量,从而简化了机械结构,消除冲头动力部分的机械接触和摩擦,提高了能量转化率。
矩形孔在圆周上的孔距通过伺服电机配合高精度减速机进行分度,设备在PLC 位置控制功能指令及程序控制下完成工件圆周12个等分矩形孔的分度和冲制。
2 PLC 位置控制功能介绍PLC 位置控制功能是将NC 定位控制器和PLC 逻辑控制器结合在一起,从而免去了PLC 和NC 之间数据交换的外部连线,简化硬件结构及程序控制结构,降低了成本。
PLC、伺服驱动器及伺服电机构成一个微型位置控制系统,其原理是NC 位置定位功能指令通过PLC 发出高速脉冲信号,经伺服驱动器脉冲细分控制伺服电机运行到达指定位置,在伺服电机位置编码器参与下系统形成半闭环位置控制,从而达到较高的位置控制精度。
这种方式简单易控,精度较高,抗干扰能力强,成本低廉,可用于很多需要简易位置控制的专用机械,目前在大多数PLC 上得到运用。
3 电气控制原理图I/O 配置及功能设计根据QDC-1冲床电气控制原理图I/O 配置(9个输入点,4个输出点,其中输出点需要2个高速脉冲计数器输出)及功能设计,对PLC 选型为FBs-20MCTSINK,图1为电气原理示意图。
3.1 I/O 定义X0:工件回零点开关,X1:编码器Z 相零位脉冲,X2:回零按钮,X3:手动单冲按钮,X4:驱动准备好信号,X5:冲头上死点和压缩空气压力检测,X6:工作启动,X7:暂停,X8冲头下死点。
图1 电气原理示意图Y0:高速计数器正向输出(120KHz),Y1:高速计数器反向输出(120KHz),Y3:伺服使能打开,Y4:电控气阀控制。
LVDT_伺服控制一体化模块的设计与实现张
0引言汽轮机数字电液控制系统(DEH )主要由液压伺服系统、电控系统等组成,其中电液(E/H )转换器是控制系统的关键部分[1]。
DEH 系统为了能满足阀门开度的闭环控制,通常通过LVDT 传感器阀门位置的采样作为阀位反馈,参与伺服控制模块的PID (比例、积分、微分)运算。
“日立”H5000M 系统由LVDT (AEH020)模板和SERVO (AEH001)模板共完成DEH 阀门闭环控制,在实际使用中,存在结构复杂、参数调整难、使用不便的问题。
LVDT 伺服控制一体化模块是内置LVDT 变换器和PI 调节器阀门位置的伺服控制驱动卡,适用于HIACS 系统的HSC4000总线[2],内置抗积分饱和的可调节参数的PI 调节器(可设定为纯比例调节器);可实现携带无扰切换功能的后备手动操作和指示;具有硬件快速关断保护功能和AI (模拟输入)、AO (模拟输出)量程自动校正功能;可对模板参数进行控制器下载和上传;具有自诊断和硬件故障报警功能。
由此可见,LVDT 伺服控制一体化模块结构简单、功能强大、使用方便[3]。
本文主要从结构、接口、功能原理、总线、参数设定、LVDT 校准等方面介绍LVDT 伺服控制一体化模块的设计方案。
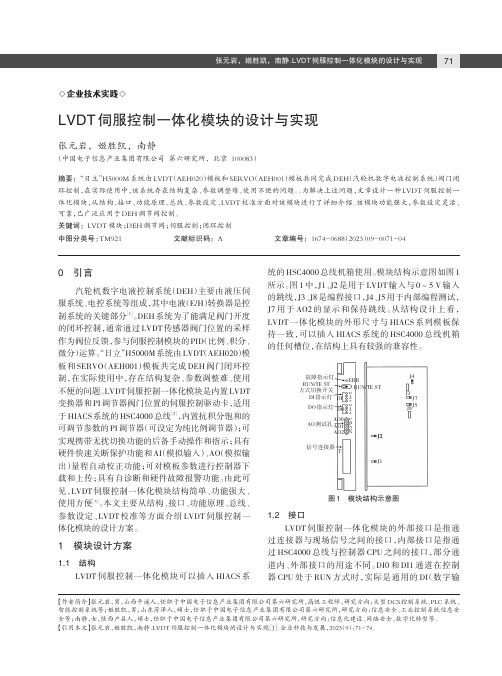
1模块设计方案1.1结构LVDT 伺服控制一体化模块可以插入HIACS 系统的HSC4000总线机箱使用。
模块结构示意图如图1所示。
图1中,J1、J2是用于LVDT 输入与0~5V 输入的跳线,J3、J8是编程接口,J4、J5用于内部编程测试,J7用于AO2的显示和保持跳线。
从结构设计上看,LVDT 一体化模块的外形尺寸与HIACS 系列模板保持一致,可以插入HIACS 系统的HSC4000总线机箱的任何槽位,在结构上具有较强的兼容性。
J4J3J7J5J8J2J101230123P N P N P NTAO2AO1AO0DIDOERRRUN/TE STDO 指示灯故障指示灯RUN/TE ST 方式切换开关DI 指示灯AO 测试孔信号连接器图1模块结构示意图1.2接口LVDT 伺服控制一体化模块的外部接口是指通过连接器与现场信号之间的接口,内部接口是指通过HSC4000总线与控制器CPU 之间的接口,部分通道内、外部接口的用途不同。
电动气压撑杆控制器技术要求
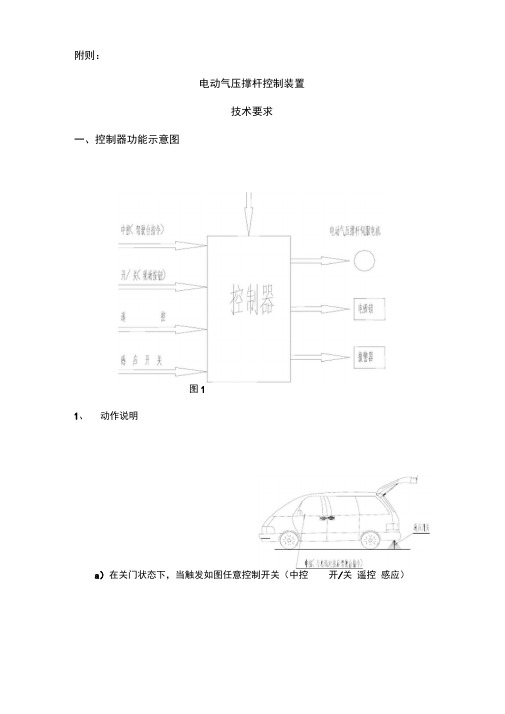
附则:电动气压撑杆控制装置技术要求一、控制器功能示意图图11、动作说明a)在关门状态下,当触发如图任意控制开关(中控开/关遥控感应)电吸锁开启报警蜂鸣b)在开门状态下,当触发如图任意控制开关(中控开/关遥控感应)滞后1~1.5S尾门关闭_________________ k电吸锁关闭2、控制器为独立使用装置,在加载12V直流电源后能独立完成图1所示的驱动要求。
3、电路设计符合汽车电子设计规范,能满足汽车前装与后装市场的技术、工艺要求。
4、在驻车状态下完成所要求的驱动动作,具备完善的故障自检报警和处置功能,含学习记忆功能(详见三.1伺服电机工作要求)。
5、成本可控,制造简单,使用维护方便。
6、外观符合现代工业加工规范,有完美的几何可视线条。
7、技术建议(供参考)8 选用飞思卡尔MC9S/2 X 128MAA(80脚)MCU做主控制芯片。
9、基于电动气压撑杆为一新颖的机电一体装置,其应用领域非常广阔,考虑到系统的可扩张面和产品使用拓展,建议引入嵌入式系统设计方案,优先选用符合汽车行业特点的MCU,以及电路方案,采用C语言设计控制程序。
二、电动气压撑杆控制器控制要求1、中控:控制器留有与汽车总成对接的硬件收发模块的安装位置及相应的端口电路(符合CAN2.0/2.0B、LIN2.0/2.1总成协议规范),程序中有相应的函数接口,以便在前装中实现与中央控制器对接。
2、开/关(现场控制):现场开启,完成控制器驱动的相应动作。
3、遥控:具有双向休眠与唤醒功能及编码学习功能,手持遥控器再配在15只以内,采纳无线射频(RFID)的PRE双频系统,加密协议采用可变密钥的安全协议,搜寻范围15m以上4、感应:如图3图35、当手持遥控器进入45°的阴影区后感应开启,经人工触发后,控制器完成驱动动作。
搜寻区域限于车厢尾部图示45°阴影区,搜寻范围在2.5m以内,不小于2m,以保证控制器在后装应用中独立使用的安全性。
伺服气缸工作原理

伺服气缸工作原理
伺服气缸是一种将电气信号转化为机械运动的装置。
其主要原理是通过液压或气压来控制活塞的运动,从而实现机械的工作。
伺服气缸的工作原理可以分为三个步骤:感应、控制和执行。
首先是感应步骤。
伺服气缸通过感应装置,如传感器或编码器,接收输入的电气信号。
感应装置能够将输入的电信号转化为机械部分所需的位置、速度或力的信息。
接下来是控制步骤。
伺服气缸内部有一个控制单元,它根据接收到的信号来判断需要进行的动作。
通过控制单元的处理,电气信号经过放大、滤波、比较等操作,最终反馈给伺服气缸的执行部分。
最后是执行步骤。
根据控制单元输出的信号,伺服气缸内的执行部分开始工作。
液压或气压通过阀门的控制,将液体或气体输入到气缸的一个端口,压力使活塞开始运动。
活塞的运动通过连接机械装置,完成所需的工作。
伺服气缸的工作原理可以使其在许多工业领域中得到广泛应用。
通过精确的控制、高速度和高力度的运动,伺服气缸能够满足各种工艺要求,并提高生产效率。
气压伺服系统的组成及原理

气压伺服系统的组成及原理
气压伺服系统是以气压作为能源的一种伺服控制系统。
它由气源、伺服阀(或叫执行器)和控制器三部分组成。
1.气源:提供动力,通常使用压缩空气。
2.伺服阀:用于控制动作,是系统的执行机构。
3.控制器:负责控制、监测和反馈。
具体来说,控制器会接收到来自外部的控制信号,然后将信号
转换为控制电压给伺服阀,控制伺服阀打开或关闭,进而控制气压大小和方向,使被控设备的位置、速度或力度按照要求发生变化。
在气压伺服系统中,执行机构一般常采用活塞式气缸。
它的基本工作原理是:由控制信号激活伺服阀,使压缩空气进入阀芯腔,通过阀芯腔内的控制口控制部件移动,从而实现位移或转动。
工作流程一般分为三步:感应、控制、反馈。
感应阶段是系统接收外部控制信号的过程,也是控制器对阀门进行操作的过程;控制阶段是将控制信号转换成控制电压送到伺服阀进行控制调节的过程;反馈阶段则是通过传感器监控被控制设备的状态,并将反馈信息送回控制器,调整气压大小和方向,以实现所需的控制目标。
气压伺服系统具有结构简单、精度高、响应速度快、可靠性高等优点,在一些特定的场合下具有独特的应用优势,如冶金、煤气、石油化工等各种过程控制系统。
但是,由于气体的可压缩性,气压伺服系统的伺服刚度常比液压伺服系统低得多。
以上信息仅供参考,如有需要,建议您咨询气压伺服系统相关厂商或技术人员。
气动伺服系统的性能分析与优化

气动伺服系统的性能分析与优化气动伺服系统是一种通过压缩空气驱动实现高精度、高可靠性的运动控制系统。
采用气动伺服系统可以实现快速、精准的位置和速度控制。
然而,在应用气动伺服系统时,不同控制系统的性能却存在明显差异。
因此,进行气动伺服系统的性能分析与优化,极为重要。
一、气动伺服系统性能分析1.响应速度和位置精度在气动伺服系统中,响应速度和位置精度是重要的性能指标。
响应速度是指从发出控制信号到执行控制指令所需的时间。
在气动伺服系统中,响应速度受到压缩空气流量、气压和工作负载等因素的影响。
较高的气压和较大的流量可以提高响应速度,但也会造成能耗增加和噪声增大等问题。
位置精度是指气动伺服系统控制运动位置的精度。
位置精度受到工作负载和测量设备的精度等因素的影响。
2.瞬时转矩和静态刚度在气动伺服系统中,瞬时转矩是指在运动过程中,系统能够承载的瞬时最大转矩值,通常与系统气压和工作负载有关。
静态刚度是指系统在空载状态下的反弹位移,即当传感器输出为零时,输出位置的误差。
瞬时转矩和静态刚度是气动伺服系统的基本特性,对于运动控制性能具有重要的影响。
3.系统稳定性和可靠性气动伺服系统的稳定性和可靠性也是十分重要的性能指标。
系统的稳定性指系统在受到外界干扰时,能够保持稳定运行的能力。
而系统的可靠性则指系统运行时的故障率和维护成本等。
气动伺服系统的稳定性和可靠性对于系统的长期运行和性能发挥具有决定性作用。
二、气动伺服系统性能优化1.改善响应速度和位置精度为改善气动伺服系统的响应速度和位置精度,可以优化系统的压缩空气供应,采用高效节能的压缩空气处理设备和传感器设备。
此外,合理的系统设计和构造,可以优化气动伺服系统的空气通路和工作负载布局,提高系统的响应速度和位置精度。
2.提高瞬时转矩和静态刚度提高气动伺服系统的瞬时转矩和静态刚度,可以采用高压气源、高刚度材料、优化气路布局和传感器布置等方式。
同时,选择适当的气动伺服系统及传感器设备,也能有效提高系统的瞬时转矩和静态刚度。
气动机械手的电气-气压伺服系统设计
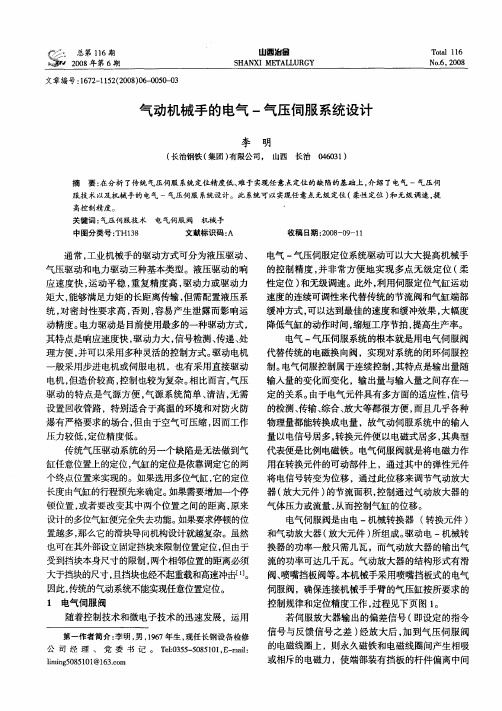
伺服阀,确保连接机械手手臂的气压缸按所要求的 控制规律和定位精度工作 , 过程见下页图 l 。
若伺服放大器输出的偏差信号 ( 即设定 的指令 信号与反馈信号之差 ) 经放大后 , 加到气压伺服 阀 的电磁线圈上 , 则永久磁铁和电磁线圈间产生相吸 或相斥的电磁力 ,使端部装有挡板的杆件偏离 中问
山西冶金
2
T tl 1 6 0 l a 1 No6, 0 8 . 2 0
S HAN Ⅺ
ME A RGY T U
文章编号 :6 2 15 (0 80 - 0 0 0 17 — 22 0 )6. 5- 3 1 - 0
气动机械手的电气 一气压伺服 系统设计
李 明 J , 1
和气动放 大器 ( 放大元 件 ) 所组成 。 驱动 电 一机械 转
顿位置 , 或者要改变其中两个位置之间的距离 , 原来
设计 的多位气缸便完全失去功能 。 如果要求停顿 的位
置越多 , 那么它 的滑块 导 同机构设计就越 复杂。虽然
也可在其外部设立 固定挡块来 限制位 置定位 , 由于 但
( 长治钢铁 ( 集团 ) 有限公司, 山西 长治 0 6 3 ) 4 0 1
摘 要: 在分析 了传统 气压伺服 系统定位精度低 、 难于实现任意点定位的缺 陷的基础上 , 介绍 了电气 一气压伺
’
电 气伺服 阀 机械 手
服技 术以及机械 手的 电气 一气压伺服 系统设计。此 系统可以 实现任意点无级定位 ( 柔性定位 ) 和无级调速 , 提
图 1 电气 一气 压 伺 服 阀 工 作 原理 图
排气
接气缸负载孔
平衡位置绕支点左右摆动 ,挡板使对称布置的两个
图 2 转换器原理 图
机电一体化第六章伺服驱动控制系统设计
钟。 F.体积小、自定位和价格低是步进电动机驱动控制的三大优势。 G. 步进电机控制系统抗干扰性好
上一页 下一页
二、 伺服驱动控制系统设计的基本要求
1. 高精度控制 2. 3. 调速范围宽、低速稳定性好 4. 快速的应变能力和过载能力强 5. 6.
闭环调节系统。
(4) ①
② 调节方法。
(5) ① 使用仪器。用整定电流环的仪器记录或观察转速实际值波形,电
② 调节方法。
上一页 下一页
六、 晶体管脉宽(PWN)直流调速系统
晶体管脉宽直流调速系统与用频率信号作开关的晶闸管系统相比,具 (1) 由于系统主电源采用整流滤波,因而对电网波形影响小,几乎不 (2) 由于晶体管开关工作频率很高(在2 kHz左右),因此系统的 (3) 电枢电流的脉动量小,容易连续,不必外加滤波电抗器也可平稳 (4) 系统的调速范围很宽,并使传动装置具有较好的线性,采用Z2
上一页 下一页
(2) ① A. 步进电动机型号:130BYG3100D (其他型号干扰大) B. 静转矩15 N·m C. 步距角0.3°/0 6°
D. 空载工作频率40 kHz E. 负载工作频率16 kHz ② A. 驱动器型号ZD-HB30810 B. 输出功率500 W C. 工作电压85~110 V D. 工作电流8 A E. 控制信号,方波电压5~9 V,正弦信号6~15 V ③ 控制信号源。
(3) ① 标准信号控制系统(如图6-16) ②检测信号控制系统 (如图6-17)
③ 计算机控制系统(如图6-18)
上一页 返 回
图6-16 标准信号控制系统图 图6-17 检测信号控制系统图 图6-18 计算机控制系统图
《高性能伺服装置负载惯量辨识方法的研究与实现》
《高性能伺服装置负载惯量辨识方法的研究与实现》一、引言随着现代工业自动化程度的不断提高,高性能伺服装置在各种机械设备中扮演着越来越重要的角色。
负载惯量辨识作为伺服装置控制中的重要环节,对于提高系统的动态性能和稳定性具有重要意义。
本文旨在研究高性能伺服装置负载惯量辨识方法,并探讨其在实际应用中的实现。
二、负载惯量辨识的重要性负载惯量是伺服系统中的重要参数,它直接影响着系统的动态响应和稳定性。
准确辨识负载惯量对于提高伺服系统的性能具有重要意义。
首先,负载惯量的准确辨识有助于优化控制策略,使系统能够更好地适应不同负载条件。
其次,准确的负载惯量辨识可以降低系统能耗,提高能源利用效率。
此外,在多轴联动系统中,各轴之间的耦合作用与负载惯量密切相关,因此准确辨识负载惯量对于提高多轴联动系统的协调性和稳定性至关重要。
三、负载惯量辨识方法研究目前,负载惯量辨识方法主要包括间接法和直接法。
间接法主要通过分析系统输入输出数据来估算负载惯量,其优点是算法简单、易于实现。
然而,这种方法往往受到系统噪声和干扰的影响,导致辨识结果不够准确。
直接法则是通过在系统中加入特定的激励信号来直接测量负载惯量,虽然能够获得较为准确的结果,但实现起来较为复杂。
针对上述问题,本文提出一种结合间接法和直接法的高性能伺服装置负载惯量辨识方法。
该方法首先利用间接法对系统进行初步的负载惯量估算,然后通过直接法对估算结果进行验证和修正。
具体实现过程中,可以采用一些优化算法来提高辨识精度和稳定性。
四、实现过程1. 数据采集与处理:通过传感器采集伺服系统的输入输出数据,包括电机电流、电压、位置等信息。
对采集到的数据进行预处理,如去噪、滤波等操作,以提高数据质量。
2. 初步估算:利用间接法对负载惯量进行初步估算。
可以通过分析系统动力学模型,建立输入输出数据的数学关系,然后通过优化算法求解得到初步的负载惯量估算值。
3. 验证与修正:采用直接法对初步估算结果进行验证和修正。
伺服系统的分类和特点
伺服系统的分类和特点一、引言伺服系统,作为现代工业自动化的重要组成部分,其性能和特点在很大程度上决定了整个系统的性能和稳定性。
伺服系统能够根据输入的指令信号,自动、快速、准确地控制执行机构的位移、速度和加速度,实现对目标值的精确跟踪。
本文将对伺服系统的分类和特点进行详细的阐述,以便更好地理解和应用伺服系统。
二、伺服系统的分类伺服系统可以根据工作原理和应用领域进行分类。
1.根据工作原理分类根据工作原理,伺服系统可以分为电气伺服系统和液压伺服系统两大类。
其中,电气伺服系统又可以分为直流伺服系统和交流伺服系统。
(1)直流伺服系统:直流伺服电机由定子、转子、电刷和换向器等部分组成。
其工作原理是当电流通过励磁绕组和电枢绕组时,产生磁场,驱动转子旋转。
直流伺服电机具有调速范围广、低速性能好、响应速度快等优点,但同时也存在维护成本高、易磨损等缺点。
(2)交流伺服系统:交流伺服电机由定子、转子和编码器等部分组成。
其工作原理是通过控制电机的输入电压或电流,改变电机的旋转速度和方向。
交流伺服电机具有效率高、可靠性高、维护成本低等优点,但同时也存在调速范围较窄、低速性能较差等缺点。
2.根据应用领域分类根据应用领域,伺服系统可以分为工业伺服系统和航空伺服系统两大类。
(1)工业伺服系统:工业伺服系统主要用于工业自动化生产线、数控机床、包装机械等领域。
其特点是要求精度高、稳定性好、可靠性高、响应速度快等。
常见的工业伺服系统有电机驱动控制系统、气压传动控制系统和液压传动控制系统等。
(2)航空伺服系统:航空伺服系统主要用于航空器自动驾驶系统、雷达天线控制系统等领域。
其特点是要求精度高、可靠性极高、响应速度快、抗干扰能力强等。
常见的航空伺服系统有舵机控制系统、燃油控制系统等。
三、伺服系统的特点1.精度高:伺服系统的输出量能够精确地跟踪输入指令信号,从而实现高精度的位置控制和速度控制。
2.快速响应:伺服系统具有快速的动态响应特性,能够迅速跟踪输入信号的变化,保证系统的稳定性和动态性能。
气压传动中的机器人与自动化装备研究
气压传动中的机器人与自动化装备研究气压传动是一种基于压缩空气的动力传输方式,逐渐在机器人和自动化装备领域得到应用。
本文将探讨气压传动在机器人和自动化装备研究中的应用及其相关技术。
一、引言随着科技的发展和工业自动化水平的提高,机器人和自动化装备在现代生产中发挥着越来越重要的作用。
而气压传动作为一种新兴的动力传输方式,具有很多优势,逐渐引起了研究者的关注。
二、气压传动在机器人领域的应用1. 气压传动机器人的结构与原理气压传动机器人的结构与传统机器人类似,但其动力系统采用气源和气缸来替代电动机和伺服系统。
气源通过管路与气缸相连,控制气压的变化来驱动气缸的运动,从而完成机械臂、移动平台等部分的运动。
2. 气压传动机器人的优势相比于传统机器人,气压传动机器人具有以下优势:(1)适应性强:气压传动机器人可以适应高温、高湿、易爆等恶劣环境,具有更广泛的应用场景。
(2)节能环保:气压传动机器人不需要电源,仅依靠压缩空气就可以实现动力传输,减少了能源的消耗,同时减少了对环境的污染。
(3)安全性高:气压传动机器人工作过程中不会产生电火花,降低了火灾和爆炸的风险,更加安全可靠。
3. 气压传动机器人的应用领域目前,气压传动机器人主要应用于以下领域:(1)工业自动化:气压传动机器人可以应用于流水线上的装配、搬运、喷涂等任务,提高生产效率和产品质量。
(2)危险环境探测:气压传动机器人可以用于核电站、化工厂等危险环境的巡检和救援任务。
(3)医疗卫生:气压传动机器人可以用于手术助手、康复辅助装置等医疗卫生领域。
三、气压传动在自动化装备中的研究1. 气压传动系统的设计与优化气压传动系统的设计需要考虑动力输出的平稳性、力矩输出的准确性以及能源的消耗等因素。
研究者可以通过模拟与优化方法,对气压传动系统进行设计和优化,以获得更好的性能和效果。
2. 气动元件的研发气压传动系统离不开各种气动元件的支持,如压力控制阀、气缸等。
研究者可以通过改进气动元件的结构和性能,提高气压传动系统的工作效率和控制精度。
机械设计手册:单行本 气压传动(第六版)

2.1气动管道最大体积流量的计算因素 2.2空气设备最大耗气均值的计算 2.3气动管道络的压力损失 2.4泄漏的计算及检测 2.5压缩空气络的主要组成部分 2.6管道直径的计算及图表法 2.7主管道与支管道的尺寸配置
4.1影响压缩空气质量的因素 4.2净化车间的压缩空气质量等级 4.3不同行业、设备对空气质量等级要求
2真空发生器的主 要技术参数
1真空系统的概述
3真空吸盘
4真空辅件
5真空元件选用 注意事项
2.1单级真空发生器及多级真空发生器的技术特性 2.2普通真空发生器及带喷射开关真空发生器的技术特性 2.3省气式组合真空发生器的原理及技术参数 2.4真空发生器的选择步骤
3.1真空吸盘的分类及应用 3.2真空吸盘的材质特性及工件材质对真空度的影响 3.3真空吸盘运动时力的分析及计算、举例
2.1螺纹的种类 2.2公制螺纹、G螺纹与R螺纹的连接匹配 2.3接头的分类及介绍
3.1概述 3.2消声器的消声原理 3.3消声器分类 3.4消声器选用注意事项
2气动系统设计优 化及元件选择
1气源系统配置及 改造
3泄漏检测、维修 及建立状态监视系
统
1电驱动与气驱动特 性比较
2模块化电驱动运动 模式分类
8.1电感式接近传感器SIEN-M12(Festo) 8.2 18D型机械式气动压力开关(Norgren) 8.3 ISE30/ZSE30系列高精度数字压力开关(SMC公司) 8.4 SFE系列流量传感器(Festo)
1气管的分类 2螺纹与接头
3消声器 4储气罐
1.1软管 1.2硬管 1.3影响气管损坏的环境因素 1.4气管使用注意事项
5.1目前的标准 5.2关于“爆炸性气体环境用电气设备第1部分:通用要求”简介 5.3关于“爆炸性环境第14部分:场所分类爆炸性气体环境”简介 5.4 ATEX94/9/EC指令和ATEX1999/92/EC指令
一种基于PID算法的气压控制技术
为 满量 程精 度 ) 3 i , 0 m n内稳 定 度 可 达 ± . 1 满 量 00 %
程, 实现了相当于一级压力标准精度的气压控制。
活塞 式压 力计及 浮球 式压 力计 通过 增减砝 码来 产 生稳 定压 力 , 能产 生连 续压力 值 , 不 也不 能产生 线性 变
化 的压力 ; 丝杠 及手泵 既 能产生 线性 变化 的压力 , 能 也
p r n e ut dc t a h o t lp e i o fp e mai rsue i i r v d a d temeh d i ey ei me trs l i iaet t e cnr rcs n o n u t pes r s mp o e n h to sv r sn h t o i c
为 了保 证测 量 精度 , 类 压 力 传感 器应 该 定 期 校 各 准 。压力 开关 及 控 制 器 等 要 进 行 切换 差 ( 换 误 差 ) 切 检定 , 需要可以线性升降压的压力源 ; 弹簧管压力表 、 数字压 力计及 压 力变 送 器 等 要进 行 示 值 误差 检 定 , 需 要可 以产生 稳定 压力 的压 力 源 ; 根据 国家 计 量 检定 规 程 的要 求 … , 电接 点压 力表 同时 要进 行 切 换 差及 示 值
方 案提 高了气体压 力 的控 制精度 , 计量检 定领 域具 有 良好 的应 用前 景 。 在
机电一体化系统设计第4章伺服系统设计1

常用的是前面2种调速方式。
晶闸管的结构与符号
晶闸管是具有三个PN 结的四层结构, 其外形、 结构及符号如图。
四
层
A
半
导
体
G
K
(a) 符号
A 阳极
三
二、步进电动机及其控制
1、工作原理:
当第一个脉冲通入A相时,磁通企图沿着磁阻最小的 路径闭合,在此磁场力的作用下,转子的1、3齿要和A 级对齐。当下一个脉冲通入B相时,磁通同样要按磁阻最 小的路径闭合,即2、4齿要和B级对齐,则转子就顺逆 时针方向转动一定的角度。
三、步进电动机及其控制
若通电脉冲的次序为A、C、B、A…,则不 难推出,转子将以顺时针方向一步步地旋转。这 样,用不同的脉冲通入次序方式就可以实观对步 进电动机的控制。
B
W 2 sin
W
2
由于θ值很小,条纹近似与栅线的方向 垂直,故称为横向莫尔条纹。
横向莫尔条纹重要特性: ①莫尔条纹运动与光栅运动具有对应关系 ②莫尔条纹具有位移放大作用 ③莫尔条纹具有平均光栅误差作用
原理图1
退出
4.2 伺服系统执行元件及其控制
一、执行元件类型及特点 二、步进电机及其控制 三、伺服电机及其控制
(1) 原理: 励磁绕组WF接到电压为的交流电网上,控制
绕组接到控制电压上,当有控制信号输入时,两 相绕组便产生旋转磁场。该磁场与转子中的感应 电流相互作用产生转矩,使转子跟着旋转磁场以 一定的转差率转动起来,其旋转速度为
n 6f( 0 1 s )p n 0 ( 1 s )
伺服阀的基本原理

伺服阀的基本原理伺服阀是一种能够控制液压和气压系统中流体流动的装置。
它通过改变阀芯和阀座之间的相对位置,以控制液压或气压的压力、流量和方向。
伺服阀的基本原理是靠电磁力或机械迁移力控制阀芯的运动,从而实现对流体流动的精确控制。
伺服阀的基本组成部分包括阀体、阀芯、电磁线圈或机械驱动装置。
阀体是将所有部件组装在一起的外壳,通常由金属材料制成,具有良好的密封性能。
阀芯是一个移动的部件,通过与阀座配合来控制流体的流动。
阀芯通常由金属材料制成,表面光滑以确保良好的密封性能。
伺服阀的原理可以分为电磁控制和机械控制两种。
1. 电磁控制原理:电磁控制伺服阀的原理是利用电磁激励力来控制阀芯的位置。
伺服阀的电磁线圈通常由一个或多个线圈组成,当线圈通电时,产生的磁场会对阀芯施加一个力,使其向开启或关闭的方向运动。
电磁控制伺服阀具有响应速度快、精度高的优点,广泛应用于工业自动化领域。
2. 机械控制原理:机械控制伺服阀的原理是利用机械力来控制阀芯的位置。
机械驱动装置可以通过螺旋杆、液压缸或气缸等方式实现。
当机械驱动装置运动时,会通过连杆或拨动杆将力传递给阀芯,推动阀芯的位置发生相应的变化。
机械控制伺服阀具有结构简单、稳定可靠的优点,常用于较大流量和高压力条件下的控制系统。
伺服阀的工作原理可以通过以下几个步骤来描述:1. 初始状态:伺服阀处于初始状态时,阀芯与阀座紧密结合,阀口完全关闭,流体无法通过。
2. 控制信号:当控制系统发送信号给伺服阀时,控制信号会激活电磁线圈或机械驱动装置。
电磁控制伺服阀的电磁线圈通电后,产生的磁场对阀芯施加力,使阀芯向开启或关闭的方向运动。
机械控制伺服阀的机械驱动装置也会通过力的传递使阀芯发生位移。
3. 阀芯移动:根据控制信号的不同,阀芯会向开启或关闭的方向移动。
当阀芯离开阀座时,形成了一个通道,流体开始通过伺服阀。
4. 流体流动控制:阀芯的位置变化会导致流体流动的变化。
当阀芯位于开启位置时,流体会通过伺服阀,流量增大;当阀芯位于关闭位置时,流体无法通过伺服阀,流量减小。
伺服比例阀工作原理
伺服比例阀工作原理
伺服比例阀是一种通过控制阀芯位置来控制流量和压力的装置。
它由一个电磁比例阀和一个伺服阀组成。
工作原理如下:
1. 电磁比例阀:伺服比例阀的控制信号来自一个电磁比例阀,该阀根据输入的电流信号来控制阀芯的位置。
阀芯位置的改变会改变液压流量和压力。
2. 伺服阀:伺服阀是一个气动机械装置,通过控制插入阀芯的气压来调节阀芯位置。
当电磁比例阀接收到控制信号后,它会产生气压信号,将气压传递给伺服阀。
伺服阀会根据气压信号来调整阀芯的位置。
3. 阀芯位置控制:通过改变阀芯位置,伺服比例阀可以调节液压系统中的流量和压力。
当阀芯位于某个位置时,液压油会通过阀芯的通道流过,从而控制流量。
同时,改变阀芯位置也会影响阀的开口面积,从而调节液压系统中的压力。
4. 反馈控制:伺服比例阀会不断地对阀芯位置进行反馈,以保持阀芯在目标位置。
这个反馈控制可以通过一些传感器来实现,例如位置传感器或压力传感器。
这些传感器会监测阀芯的位置和液压系统中的压力,并将这些信息反馈给伺服比例阀,以进行修正控制。
通过以上的工作原理,伺服比例阀可以精确地控制液压系统中的流量和压力,以满足特定的工作要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
气压位置伺服控制装置设计与实现专业:自动化学生姓名:胡慧指导教师:郑恩辉许宏摘要:气动技术是一种传动与控制技术,在加工制造业、机器人等领域受到越来越多的重视,并获得了广泛的应用。
气动技术由于空气介质易获取、污染小、易存储、传输快等优点,适用于易燃、易爆、强辐射和多粉尘等恶劣环境,在工程实际应用中得到了前所未有的发展。
但是,因为气体介质的可压缩性、低粘性,使得系统的定位精度、定位刚度、低速特性和频响都难以进一步提高,系统的固有频率和阻尼比都比较低,稳定性大受影响,非线性严重,限制了其进一步应用。
为了研究气压位置伺服控制系统的特性,本设计搭建一套气压位置伺服控制硬件装置,并在此装置上研究增量式PID和模糊控制算法的控制性能。
硬件装置主要由日本SMC公司的CM2XL32-250型气缸、VQ110U-5L型电磁阀、长春三峰传感器有限公司的LMS-2-25-300-F型光栅传感器、北京华控技术有限公司的HY-6060C/6070C通用数据采集控制板卡构成。
软件系统主要包括主程序、中断服务程序、数据采集程序、画图程序、控制算法程序及阀驱动程序。
光栅尺出来的信号通过位置检测电路处理经过数据采集卡送到计算机,通过计算机中预先给定的软件程序处理,再经过数据采集卡输出控制信号给驱动电路来控制电磁阀运动。
基于PID和PID+模糊复合控制两种控制方法的试验研究表明:两种方法基本满足位置控制要求,其中后者优于前者。
关键词:气压位置伺服控制PWM控制PID PID+模糊1.引言气动技术是一种传动与控制技术,在加工制造业领域越来越受到人们的重视,并获得了广泛的应用。
目前,伴随着微电子技术、通信技术和自动控制技术的迅速发展,气动技术也在不断创新,以工程实际应用为目标,已得到了前所未有的发展。
在工业领域中,一直在研究、试验和运用许多新的气动控制设备,因此气压伺服系统的组成部分也很多,但其基本组成包括气动控制元件和执行元件,如控制阀、气缸或者由这些元件构成的组合元件。
2.气压伺服系统的基本组成和结构原理凡是气压伺服系统,其基本构成除了有气动控制元件和气动执行元件(马达、气缸等)组成驱动回路(或称动力回路)外,还应当有反馈电位计、伺服放大器、传感器等形成的信息反馈回路。
和气压传动一样,从能量传递和转换意义上看,气压伺服系统也是一个通过工作介质进行能量调节、传递和转换的装置。
因此,任何一个气压伺服系统,都可归纳为如下几个组成部分:能量转换部件:气马达、气缸(气压作动筒);能量调节部件:节流板孔、节流阀、气动滑阀、喷嘴挡板阀、射流管阀、减压阀等;能量传递部件:管道及管路上各种辅助元件(滤清器等);信息回路部件:各种检测元件、传感器(压力传感器、位移传感器、速度传感器等)以及各种放大器;气压伺服系统结构原理图如图2.1,气压伺服系统的控制框图如图2.2。
图2.1 气压伺服系统结构原理图图2.2 气压伺服系统的框图组成3.气压位置伺服系统的工作过程气压伺服系统是以气体作为工作介质,通过组成气压伺服系统的管路、控制元件和执行元件(气缸、气压马达),实现能量传输、能量调节和能量转换,达到对一个过程或者一个单体施行控制作用。
气压位置伺服系统是由伺服控制器、执行器(阀)、位移传感器、气缸四个部分组成的,气缸和位移传感器是通过外部连接机构连在一起,当气缸运动时位移传感器的滑块跟着移动,气缸活塞的运动距离也就是位移传感器的滑块的移动距离,位移传感器检测到的移动距离反馈给伺服控制器,伺服控制器将位移传感器检测到的信息与我们给定的设定数值进行比较,然后输出不同的模拟量信号,控制阀门,改变阀芯的位移量,也就是改变了气缸进排气的流量,从而实现气缸的加速、匀速、减速和停止。
4.气压位置伺服控制装置的硬件设计4.1 气压控制阀高速开关阀是一种数字式控制阀,与伺服阀相比,具有结构简单、价格低廉、抗污染能力强、响应快速和工作可靠等优点。
它只有开和关2种极限工作状态,容易实现数字计算机控制和气、液技术的有机结合。
高速开关阀采用脉冲流量控制方式,直接根据一系列脉冲信号进行开关,在阀出口输出一系列相应的脉冲流,脉冲流的时间平均值即为控制流量。
流体脉冲的形成和调节方法有多种,这里选用PWM 方法对系统进行控制。
4.2 高速开关阀的响应特性高速开关阀对系统的影响主要表现在其启、闭死区特性的影响。
对于理想的开关阀,驱动电压波形与阀芯位移应相同,而对于实际应用的高速开关阀由于受阀芯惯性、摩擦和线圈的影响,阀芯响应不会随时跟上电压信号的变化。
本实验系统利用高速开关阀的脉宽调制PWM 方法进行动态响应控制,其响应特性图如图4.1所示。
s t 为调制周期,on t 为在一个调制周期内阀为开的时间。
在时间s t 内,1t 是阀打开的滞后时间,则()21t t +是阀的开启时间;3t 为阀关闭滞后时间,4t 为阀芯从开始关闭到全闭时的时间,即结束信号响应时间,则()43t t +为阀关闭时间。
滞后时间主要是由于摩擦和阀芯的惯性等因素产生的。
滞后时间越小,则系统的动态响应特性越好。
另外,由于阀控制线圈是一个感性负载,其电流增加有一个过程,只有当电流值达到一定数值时,作用在阀芯上的力才能推动阀芯产生运动。
同时,阀芯从开始运动到运动结束也需要一定的时间,因而滞后现象将很难避免,从而产生零位死区和饱和现象。
图4.1 高速开关阀的响应曲线4.3 驱动电路与传感器脉宽调制控制信号必须经过放大,才能驱动高速开关阀。
由三极管等通用的元气件完成控制信号的放大功能,具有寿命长、开关响应速度快等优点,能够满足系统的实时控制。
1,能够满足系统测量在控制系统中采用直线光栅位移传感器,分辨率为m精度要求。
5.试验结果与分析采用PID控制和PID+模糊复合控制两种控制算法对这个系统进行控制。
采用PID控制时,阶跃信号输入和正弦信号输入的情况下的响应曲线分别如图5.1和图5.2。
图5.1 PID控制阶跃响应曲线图5.2 PID控制正弦响应曲线PID+模糊复合控制时,阶跃信号输入和正弦信号输入的情况下的响应曲线分别如图5.3和图5.4。
图5.3 PID+模糊复合控制阶跃响应曲线图5.4 PID+模糊复合控制正弦响应曲线通过对所得到的响应曲线比较,虽然在阶跃信号输入情况下的响应曲线差别不是很大,但从正弦信号输入情况下,PID+模糊复合控制可以提高系统的控制品质。
6.研究总结与展望气动技术由于空气介质易获取、污染小、易存储、传输快等优点,适用于易燃、易爆、强辐射和多粉尘等恶劣环境。
但是,又因为气体介质的压缩性、低粘性,使得系统的定位精度和定位刚度、低速特性和频响都难以进一步提高,系统的固有频率和阻尼比都比较低,稳定性大受影响,非线性严重,因此应用也受限制。
本次实验采用PID控制和PID+模糊复合控制这两种控制方式,用PWM波来实现对负载的位置控制。
对负载的位置检测系统和电磁阀的驱动作了比较系统的研究。
这里,我们实现了位置信号的信号采集、PID+模糊复合控制和PID控制,PWM波程序,以及电磁阀的驱动电路。
从系统的控制结果来看,基本上实现了本次课题设计的预期目的。
在本次实验过程中,仍然存在一些问题尚未解决。
从实验结果上看,在正弦信号输入情况下的响应曲线,在波峰和波谷处存在失真现象。
实验中我们采用增量式PID算法,不过这里我们默认u=0,对实验性能产生一些影响。
由于毕业设计时间有限,无法把所有的可能性都考虑周全,希望在今后的学习和研究中进一步改善,提高气压位置伺服装置的控制精度。
参考文献[1] 徐秀芬,赵克定,刘敏,许宏光.气液联控位置伺服系统及其试验研究[J].机床与液压,2005,(4):53-55.[2] 许宏,陶国良.变阻尼气压比例伺服系统理论分析及其低速特性的实验研究[J].中国机械工程,2002,13 (15):1281-1284.[3] 邱志成,谈大龙,王宣银,刘庆和.气压伺服及气液连动控制发展概况综述[J].机床与液压,1999,4:3-6.[3] 杨庆俊,王祖温,路建萍.基于反馈线性化的气压伺服系统非线性H∞控制[J].南京理工大学学报,2002,26 (1):52-56.[4] 陶国良,王宣银,杨华勇.气动比例/伺服位置控制系统的摩擦力特性研究[J].液压气动与密封,2001,2:9-12.[5] 徐秀芬,赵克定,王洪艳.气液联控力伺服系统的控制性能及仿真研究[J].机床与液压,2006,6:97-100.[6] 徐秀芬,赵克定,袁立鹏.气液联控伺服系统的工作性能分析及试验研究][J].西安交通大学学报,2005,39 (3):266-269.[7] 许宏,赵克定,吴盛林,宋经华.一种新型气压伺服系统的动力机构特性分析[J].南京航空航天大学学报,2000,32 (5):527-532.[8] 徐秀芬,赵克定,柴国荣.一种新型气压位置伺服系统设计及模糊控制研究[J].大庆石油学院学报,2004,28 (3):71-73.[9] 张黎军,王颖,李烽口.实用光栅编码器接口电路[J].传感器世界,2002:24-26.[10] 孔晓武.高速开光阀动态性能试验装置及其应用研究[J].机电工程,2005,22 (8):38-39.[11] 黄勇.基于EPM7128的光栅位移测量仪设计[J].电子工程师,2007,33 (8):22-24.[12] 王宣银.气动位置伺服系统PID控制的研究[J].机床与液压,2001,2:49.[13] 王雪松,程玉虎,易建强.电-气位置伺服控制系统的研究进展[J].控制与策略,2007,22 (6):601-606.[14] 王祖温,詹长书,杨庆俊,李军,包钢.气压伺服系统高性能鲁棒控制器的设计[J].机械工程学报,2005,41 (11):15-19.[15] 袁希光.传感器技术手册[M].国防工业出版社,1986.749-764.[16] 王士元.C高级实用程序设计[M].清华大学出版社,1996.167-193,241-291.[17] J.L.Shearer. Nonlinear Analog Study of High Pressure Pneumatic ServoMechanism[J].American Society of Mechanical Engineer,1957,(3):143-148.[18] Wang J.et al. Modelling Study Analysis and Robust Servo Control of Pneumatic CylinderActuator Systems[J].IEE Proceedings on Control Theroy andApplications,2001.[19] XUE Yang,PENG Guangzheng,FAN Meng,WU Qinghe. New Asymmetric Fuzzy PIDControl for Pneumatic Position Control System[J].Journal of Beijing Institute of Technology,2004,13 (1):29-33.[20] LI Yin2ya,SHENG An2dong,W ANG Yuan2gang. Design of PID Controllers ofAnti-aircraft Artillery Servo System with Multiple Performance Specifications[J].JOURNAL OF CHINA ORDNANCE,2007,3 (3):185-190.[21] Xiang Gao,Zheng-Jin Feng. Design study of an adaptive Fuzzy-PD controller forpneumaticservo system[J].Control Engineering Practice 2005,13:55–65.。