车载GPS导航仪原理图
《GPS定位原理》课件

GPS定位数据的安全性问题
为保护定位数据的安全,需加密传输和存储,限制授权访问,防止数据泄露和滥用。
GPS定位技术的社会影响与导 向
GPS定位技术的普及和应用,将在交通、农业、航空和其他领域创造更加智能、 高效、便利的生活方式。
《GPS定位原理》PPT课 件
本课程将介绍GPS定位的基本原理、技术的发展历史,以及在各个领域的应用。 让我们一起探索GPS技术的魅力和未来发展趋势。
什么是GPS定位?
GPS定位是一种全球定位系统,通过卫星和接收器共同工作,使人们能够在全 球任何地点确定自己的位置和导航目的地。
GPS定位的基本原理
航海导航
• 船舶利用GPS定位进行 航行导航和定位。
• 提高海上航行的准确性 和安全性。
渔业管理
利用GPS定位技术,进行渔船 定位和渔业资源管理。
监控渔船活动和渔场情况,保 护渔业资源。
海洋科学
科学家使用GPS定位系统跟踪 海洋潮流和动态,开展海洋研 究。 促进海洋科学的发展和海洋资 源的保护。
GPS定位的优缺点及挑战
结合GPS定位,实现农田灌溉的 智能化和精准化,节约水资源。
GPS定位在航空领域的应用
1
飞行导航
GPS定位系统广泛应用于飞机导航、自动
空中交通管制
2
驾驶和飞行路径规划。
利用GPS定位技术,实现空中交通的监控
和管理,避免飞行冲突。
3
飞机安全
航空公司使用GPS定位系统来跟踪飞机位 置,确保飞行安全。
GPS定位在海洋领域的应用
GPS定位相关的法律法规和标准
法律法规
• 各国制定了GPS定位的法律法规,保障其合 法使用。
• 规定了定位数据的隐私保护和使用限制。
车载GPS卫星定位系统功能课件

03
车载GPS系统操作流程
设备安装与连接
设备检查
确保GPS接收器正常工作,显示屏无破损, 按键功能正常。
连接汽车电源
将GPS接收器的电源线连接到汽车电源上, 确保设备持续供电。
安装位置
选择一个信号接收良好的位置,如挡风玻璃 后或仪表盘上,避免阻挡信号。
蓝牙连接
如需使用语音导航功能,需将GPS接收器与 汽车音响进行蓝牙连接。
01
02
03
04
提高行车安全
提供实时路况、道路预警等信 息,降低事故风险。
提高运输效率
优化行驶路线,减少行驶时间 和成本。
提高服务质量
提供个性化服务,满足不同客 户需求。
提高企业竞争力
提升车辆管理水平和运营效率 ,增强企业竞争力。
02
车载GPS系统功能
定位功能
实时定位
车载GPS系统能够实时接收卫星信号 ,提供车辆的经度、纬度、高度和时 间等精确位置信息。
安全保障功能
紧急救援
车载GPS系统支持紧急救援功能,用户在行驶过程中遇到紧急情况 时可以一键呼叫救援中心,获得及时的救援服务。
超速提醒
车载GPS系统可以设置超速提醒功能,当车辆超过预设速度时会自 动提醒周边行人或车辆保障安全。
碰撞预警
车载GPS系统具备碰撞预警功能,通过实时监测车辆周围行人或车辆 的距离和速度,及时发出预警信号,降低事故发生的可能性。
系统启动与初始化
01
启动设备
打开汽车电源后,按下GPS接收器的 开机按钮,启动设备。
初始设置
根据设备提示,进行必要的初始设 置,如时区、日期、时间等。
03
02
定位
等待接收器接收到卫星信号,一般 需要几分钟时间。
第4-1章-GPS工作原理PPT课件
自动跟踪技术
工作原理及特点
-
1
内容
GPS常用术语 GPS基本工作原理
GPS主要特点
-
2
GPS常用术语
坐标 coordinate
有2维、3维两种坐标表示,当GPS能够收到4颗及以上卫星的信号时,它能 计算出本地的3微坐标:经度、纬度、高度,若只能收到3颗卫星的信号,它 只能计算出2维坐标:精度和纬度,这时它可能还会显示高度数据,但这数据 是无效的。
1.GPS在道路工程中的应用 由于无需通视,可构成较强的网形,提高点位精度,同时对检测 常规测量的支点也非常有效。GPS技术在隧道测量中也具有广 泛的应用前景,GPS测量无需通视,减少了常规方法的中间环 节,因此,速度快、精度高,具有明显的经济和社会效益
-
52
GPS基本工作原理
1.GPS在道路工程中的应用
13
整点报时, 每4秒1响
Big Ben,伦敦, 1859年建立
广播电台同 步向全英国 播报钟声
14
一天,一个富家女孩被一伙劫匪绑架, 送往某处藏匿……
15
木制楼梯吱吱响, 可能是个旧楼。 该听到听1收0音楼机了,吧缓?
解一下紧张 ~~~
跟着数羊睡觉吧, 1,2,3,……, 11,12,13! 一定是数错了!
GPS在道路工程中的应用,目前主要是用于建立各种道路工程控制网及测定
航测外控点等。随着高等级公路的迅速发展,对勘测技术提出了更高的要求,
由于线路长,已知点少,因此,用常规测量手段不仅布网困难,而且难以满
足高精度的要求。目前,国内已逐步采用GPS技术建立线路首级高精度控制
网,然后用常规方法布设导线加密。实践证明,在几十公里范围内的点位误
劫匪打开收音机……
GPS定位的基本原理ppt课件

p)
(Nip
p i
)
含有待定点 坐标三个未 知数
整周模糊度,每 观测一个卫星就 有一个未知数
在一个历元,未知数多于方程数,无法求解,需通过多个历元观 测值求解
23
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
3.2 载波相位测量的观测值
由接收机 瞬间测得 的不足一 周的部分
mT 0 qTT 0TDOP
TDOP qTT
18
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
2.4 伪距绝对定位精度评价(续)
3、几何精度因子GDOP 综合考虑空间位置及钟差对定位结果的影响,可用几何精度因子
GDOP
GDOP qXX qYY qZZ qTT PDOP2 TDOP2
第四章 GPS定位的基本原理
1
1 基本原理 2 测码伪距
3 载波测相伪距 4 卫星坐标
GPS工作的基本原理 – 距离后方交会
已知点:GPS卫星 待定点:接收机(天线)
2
1 基本原理 2 测码伪距
3 载波测相伪距 4 卫星坐标
卫星的位置
卫星至测站的距离 信号的捕获及定位计算
3
1 基本原理 2 测码伪距
12
1 基本原理
2 测码伪距 3 载波相位测量 4 卫星坐标
2.3 伪距绝对定位原理(续)
在测站点的近似值Xi0、 Yi0、 Zi0处泰勒级数展开,取一阶项
/ip0+vip0
p i0
aip
Xi
bipYi
cip Zi
c ti
简易制作GPS定位、轨迹记录仪设计分享(原理图+控制源码+上位机)

简易制作GPS定位、轨迹记录仪设计分享(原理图+控制源码+上位机)基于C3-370C的GPS定位及轨迹记录仪!开始⽤M48作控制MCU,结果写着写着,发现Flash空间不⾜,想换个M8或M88的,还不好买,⼿上正好还有两块STC90C52,8K的,于是就换上C52了。
C52不带AD,那电池检测⼜成问题,于是从坏的万⽤表上拆下⼀个2904运放,做了个简单的电池电压检测。
现在整个设备的供电都由锂电池直接提供,配⼀块880mah的⼿机电池,可以⽤6⼩时左右;我⽤24C64记录轨迹信息,包括⽇期时间、经纬度在内的⼀组信息,可存储512条,按1min/条,可存8⼩时。
数据通过串⼝传给上位机,上位机软件转换数据,也可直接输出KML⽂件,在Goole earth中打开。
按键0: 短按(可见卫星信息|坐标数据); 长按(运⾏|暂停);按键1: 短按(记录当前坐标数据); 长按(暂停时长按删除所有数据);按键2: 短按(背光灯); 长按(记录模式切换H/A90s/A60s/A30s/A10s);实物图⽚展⽰:附件内容包括:该GPS定位、轨迹记录仪原理图截图;GPS轨迹记录控制端源码;上位机;上位机效果图:电路相关⽂件电路图⽂件原理图.png描述:原理图截图源代码GPS轨迹记录PC端.rar描述:源代码教程上位机.rar描述:上位机收藏 (45)电路城电路折扣劵获取途径:电路城7~10折折扣劵(全场通⽤):对本电路进⾏评分获取;电路城6折折扣劵(限购≤100元电路):申请成为卖家,上传电路,审核成功后获取。
(版权归chchg所有)版权声明:电路城所有电路均源于⽹友上传或⽹上搜集,供学习和研究使⽤,其版权归原作者版权声明:所有,对可以提供充分证据的侵权信息,本站将在确认后24⼩时内删除。
对本电路进⾏投诉建议,点击投诉本电路反馈给电路城。
使⽤说明:直接使⽤附件资料或需要对资料PCB板进⾏打样的买家,请先核对资料的完整性,使⽤说明:如果出现问题,电路城不承担任何经济损失!换⼀批more>>⼤家都在看:1英飞凌⽆⼈机XMC4500多机演⽰板 - 全系统解决⽅案2【2016英飞凌杯⼀等奖】基于英飞凌⽆⼈机解决⽅案的跟拍应⽤设计3简易制作GPS定位、轨迹记录仪设计分享(原理图+控制源码+上位机)4红外遥控开关——VS1838b红外接收(原理图+PCB+源代码)5 tb6560步进电机驱动器设计原理图和PCB6NANO~~东半球最⼩的⾃平衡机器⼈(硬件+源码+3D⽂件)7【送PCB电路板】Mini3208点阵时钟(原理图+源代码+BOM表)创意制作8开源CNC控制器设计(原理图+源代码+BOM清单)继续阅读RC522-RFID门禁刷⾃动卡识别系统本设计RC522-RFID门禁刷卡识别系统采⽤STC89C52作为主控芯⽚,专⽤读卡器模块RC522⽤来读射频卡的信息,当有卡进⼊到读卡器读卡的范围内时就会读取到相应的卡序列号,并根据得到的卡序列号做出相应的操作。
GPS卫星定位的基本原理PPT课件
c (ba )(io n 4 -4)tr o p
将式(4-3)代入式(4-4),即得实际距离 系式为
i o n t r o (p 4c v -t 5a )c v t b
和伪距
之 间的关
18
GPS测量定位技术
二、伪距法定位的原理
如果已知卫星的钟差 和v t a接收机的钟差 ,v又t b 可精确求得 电离层折射改正和对流层折射改正,那么测定了伪距 ,就 可求 得实际距离 。实际距 离 与卫星坐 标(x、y、z)和 接收机坐标(X、Y、Z)之间又有下列关系:
4
GPS测量定位技术
二、单点定位和相对定位
GPS单点定位也叫绝对定位,就是采用一台接收机进行定位 的模式,它所确定的是接收机天线在WGS-84世界大地坐标系 统中的绝对位置,所以单点定位的结果也属于该坐标系统。
GPS单点定位的实质,即是空间距离后方交会。对此,在一 个测站上观测3颗卫星获取3个独立的距离观测量就够了。但是 由于GPS采用了单程测距原理,此时卫星钟与用户接收机钟不 能保持同步,所以实际的观测距离均含有卫星钟和接收机钟不 同步的误差影响,习惯上称之为伪距。其中卫星钟差可以用卫 星电文中提供的钟差参数加以修正,而接收机的钟差只能作为 一个未知参数,与测站的坐标在数据的处理中一并求解。因此, 在一个测站上为了求解出4个未知参数(3个点位坐标分量和1 个钟差系数),至少需要4个同步伪距观测值。也就是说,至少 必须同时观测4颗卫星。
16
GPS测量定位技术
二、伪距法定位的原理
为了解决定位问题,首先需将观测时得到的伪距 改正为 卫星至接收机之间的实际距离 。
设卫星钟的瞬时读数为时发出信号 ,t a 其正确的标准时刻
为 ; a 该信号到达接收机的时间为 ,t 其b 正确的标准时刻为 。
GPS 卫星定位系统原理图、芯片样图-以及防破坏注意事项
卫星定位芯片相对比较可靠,但要预防卫星定位高压电源的烧毁。
如操作不当(浸水、短路、不当充电、剧烈震动)极可能造成定位模块供电电源的烧毁,烧毁后外表无变化、不影响手机其他任何功能,且需要专业检测设备检测才能发现。
故在使用前应作相应培训,应严防误操作发生!!基于JP7-T的GPS接收机和定位系统设计0引言作为导航领域内一种全新的技术,GPS全球定位系统主要利用卫星进行定位。
GPS最初由美国政府机构控制使用,是目前世界上最为成熟和完好的全球卫星导航系统。
它由30颗(4颗为备份星)在轨卫星组成。
早期的GPS系统对民用信号的定位精度限制为100米左右,2000年后则取消这一限制。
目前,GPS可以提供的民用信号定位精度为10米左右。
GPS 现可应用于多领域(如民用航空,车辆调度管理,深海海运等整个海陆空范围内的导航等),特别是在目前的车载导航领域,GPS全球卫星定位技术更是具有广泛的应用。
随着应用领域的日益扩大,中国卫星导航仪的市场规模已从2000年的不到10亿元增长到了2005年的120亿元。
因此,对GPS进行研究和二次开发势在必行。
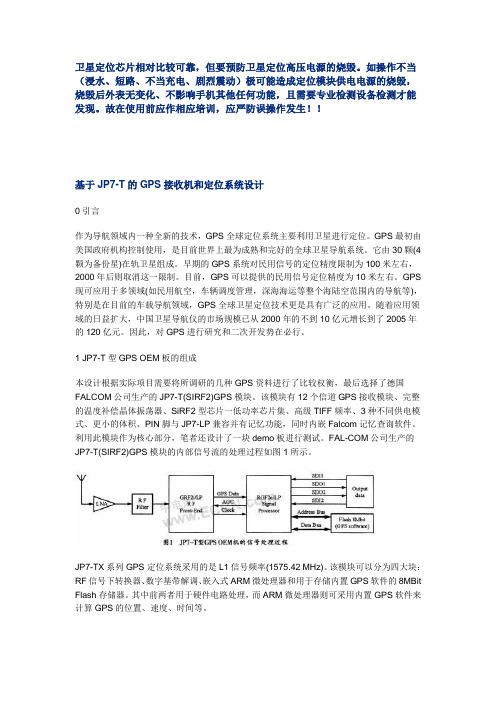
1 JP7-T型GPS OEM板的组成本设计根据实际项目需要将所调研的几种GPS资料进行了比较权衡,最后选择了德国FALCOM公司生产的JP7-T(SIRF2)GPS模块。
该模块有12个信道GPS接收模块、完整的温度补偿晶体振荡器、SiRF2型芯片一低功率芯片集、高级TIFF频率、3种不同供电模式、更小的体积、PIN脚与JP7-LP兼容并有记忆功能,同时内嵌Falcom记忆查询软件。
利用此模块作为核心部分,笔者还设计了一块demo板进行测试。
FAL-COM公司生产的JP7-T(SIRF2)GPS模块的内部信号流的处理过程如图1所示。
JP7-TX系列GPS定位系统采用的是L1信号频率(1575.42 MHz)。
该模块可以分为四大块:RF信号下转换器、数字基带解调、嵌入式ARM微处理器和用于存储内置GPS软件的8MBit Flash存储器。
GPS原理及应用PPT课件

包括主控站、监控站和注入站,负责跟踪卫星 、计算轨道和提供时间同步信息。
3
用户设备
GPS接收机,用于接收卫星信号并计算位置、 速度等信息。
GPS系统的特点
全球覆盖
GPS系统可实现全球范围内的定位 和导航。
高精度定位
利用差分技术,GPS系统可提供米 级甚至厘米级的定位精度。
实时性
GPS系统能够实时提供位置、速度 和时间等信息。
接收机的硬件和软件故障、多路径效应等, 导致接收机获取的位置信息存在误差。
地球自转和极移的影响,导致接收机获取的 位置信息存在误差。
GPS误差的处理方法
双频接收
采用双频接收技术,提高接收机的 测量精度。
差分技术
利用多个接收机同时观测同一组卫 星,通过差分算法消除公共误差, 提高测量精度。
载波相位观测
多频观测
利用多个不同频率的GPS信号进行观测,可以消除电离层误差,提高定位精度。
GPS与其他传感器的融合
惯性传感器
将GPS与惯性传感器(陀螺仪和加速度计)进行融合,可以提高定 位精度和可靠性。
地形图匹配
将GPS与地形图匹配技术进行融合,可以利用地形信息对GPS定 位结果进行修正,提高定位精度。
无线通信技术
角度计算
通过测量多个卫星信号的 相位角,可以计算出接收 机相对于卫星的方位角和 姿态角。
授时原理
时间同步
01
GPS卫星上装有原子钟,可以提供高精度的时间同步信号。
同步误差
02
由于卫星和接收机之间的时间同步存在误差,需要进行修正。
时间计算
03
通过接收机接收到卫星信号,使用修正算法对时间同步误差进
行修正,得到高精度的时间信息。
汽车定位导航系统课件ppt
2、车轮转速传感器
• 采用和ABS系统 相同的车轮转速 传感器
K为轮距、L为轴距
3、气流率陀螺仪
航迹推算
• Xn=X0+∑△Lsin0i • Yn=Y0+∑△Lcos0i
地图匹配
(二)GPS导航方法
• 美国73年开始经过20年时间、花费 200亿美元建成的定位系统。
• 最开始的目的是用于军事、现也民用。 不过采用不同码制
现代汽车的综合信息系统
• 随着新型传感器和电子显示器件的 不断涌现 以及计算机技术的发展, 汽车仪表从原来只能显示传感器信 息,发展成为由多个ECU组成能够 对各种信息进行分析、计算、加工 处理的综合信息系统。
一、汽车定位导航的概念
• 定位:给出汽车所在位置的相对或绝
对坐标。
• 导航:给汽车指示方向和路径信息。
汽车导航系统如图所示:ห้องสมุดไป่ตู้
(一)、自主导航方法
• 主要采用三种传感器获得汽车行驶方向:
1、罗盘传感器 2、车轮转速传感器 3、陀螺仪
经航迹推算-------地图匹配完成导航
1、罗盘传感器原理
无地球磁场作用时
地球磁场作用时
• 当外部磁场H作用在输出线圈的右角时,使磁力 线变为不对称,输出电压随差值成比例变化。外 部磁场以ψ角加载时:Vx=KHcos ψ Vy=KHsin ψ ψ=arctan(Vy/Vx) ψ 表示了汽车的方 向。
2、GPS导航 20200千米 分布在六条近圆轨道上,每条4颗卫星,运行周期为11小时58分,这样保证地球上任一地点都能接受到不少于4颗卫星的信
号。 2、GPS导航
3、混合导航 地面一个主控站、3个注入站、5个监测站
汽车导航系统如图所示: 现代汽车的综合信息系统 导航需要定位,定位为了导航 采用和ABS系统相同的车轮转速传感器 定位:给出汽车所在位置的相对或绝对坐标。 外部磁场以ψ角加载时:Vx=KHcos ψ 1、自主导航 卫星发射机以L波段双频1575.
车载追踪器原理图
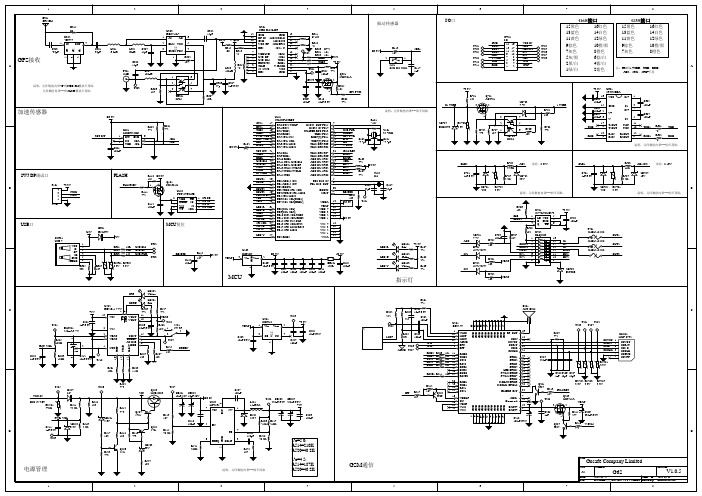
C103 22pF
T101
D3.3V
C104 22pF
USB-4
VCC DD+ ID
GND SHELD
1 2 3 4 5 0
R901 R902 R903
T902 10R USB-DM 10R USB-DP 152 USB-PUR
T903
RV901 RV902
RESET#
C113 100nF
R523
Q506 5551
ZD503 33V
R521 200K
R514=210K
R522 104
R520=40.2K
473
电源管理
R524
Vo=4.5:
103
R514=187K
说明:元件数值内带“*”的不用贴
R520=40.2K
1
2
3
4
R201
471
E201
C201
ANT-GSM
LED-Y 54
PB0/ADC12_IN8 PB1/ADC12_IN9 PB2/BOOT1 PB3/JTDO/SPI1-SCK PB4NJTRST/SPI1-MISO PB5/SPI1-MOSI PB6/I2C1-SCL[TXD1] PB7/I2C1-SDA[RXD1]
PB8[I2C1-SCL] PB9[I2C1-SDA] PB10/I2C2-SCL/TXD3 PB11/I2C2-SDA/RXD3 PB12/SPI2-NSS/CK3 PB13/SPI2-SCK/CTS3 PB14/SPI2-MISO/RTS3 PB15/SPI2-MOSI
11 10
VBAT T502
T501
1uF/6.3V BAT501 250mA/3.7V