汽车电控技术ppt课件
合集下载
汽车电子控制技术基础(共14张PPT)
电子控制系统的控制核心
图:电子控制器的基本组成
第9页,共14页。
(1)输入电路
作用:a.将各传感器及开关信号进行预处理,转换为计算机可
接受的数字信号; b.向传感器提供电压稳定的电源,确保各传感器正常工作。
数字信号输入电路、模拟信号输入电路、传感器电源
(传1感)器电:数采磁集类字各执种行信信机息构号,:将输产物生入理电参磁电量力转完路变成为控、电制信模动号作拟。。 信号输入电路、传感器电源
• 执行器:作出相应的控制动作,使控制对象工作在设定 的状态。
第2页,共14页。
第3页,共14页。
2.汽车电子控制系统的控制方式
1)开环控制:系统的输出量对系统的控制作用没有影响。
输入量
控制器
对象或过程
输出量
图2:开环控制系统
2)闭环控制:利用系统本身的调节功能,使系统输出信号 对控制产生直接影响的系统。
直动电磁类执行机构:电磁线圈通电后产生磁场,电磁力 使动作机构产生直线运动 。
旋转电磁类执行机构:电磁线圈通电后使动作机构产 生角位移。
(2)电动机类执行机构:通过电动机的转动完成控制动作。 普通直流电动机:通电后产生持续的旋转运动。 步进电动机:按“步”转动,可控制其转动的角度和转向。
第13页,共14页。
第10页,共14页。
(2)微处理器:
接受各传感器及开关信号,进行运算、分析和判断后,输出控 制指令,控制执行器工作。
第11页,共14页。
(3)输出电路
组成:信号处理电路 和驱动电路
作用:根据微处理器的 控制信号工作,使执行器 按微处理器的指令动作。
第12页,共14页。
5. 执行机构
(1)电磁类执行机构:产生电磁力完成控制动作。
图:电子控制器的基本组成
第9页,共14页。
(1)输入电路
作用:a.将各传感器及开关信号进行预处理,转换为计算机可
接受的数字信号; b.向传感器提供电压稳定的电源,确保各传感器正常工作。
数字信号输入电路、模拟信号输入电路、传感器电源
(传1感)器电:数采磁集类字各执种行信信机息构号,:将输产物生入理电参磁电量力转完路变成为控、电制信模动号作拟。。 信号输入电路、传感器电源
• 执行器:作出相应的控制动作,使控制对象工作在设定 的状态。
第2页,共14页。
第3页,共14页。
2.汽车电子控制系统的控制方式
1)开环控制:系统的输出量对系统的控制作用没有影响。
输入量
控制器
对象或过程
输出量
图2:开环控制系统
2)闭环控制:利用系统本身的调节功能,使系统输出信号 对控制产生直接影响的系统。
直动电磁类执行机构:电磁线圈通电后产生磁场,电磁力 使动作机构产生直线运动 。
旋转电磁类执行机构:电磁线圈通电后使动作机构产 生角位移。
(2)电动机类执行机构:通过电动机的转动完成控制动作。 普通直流电动机:通电后产生持续的旋转运动。 步进电动机:按“步”转动,可控制其转动的角度和转向。
第13页,共14页。
第10页,共14页。
(2)微处理器:
接受各传感器及开关信号,进行运算、分析和判断后,输出控 制指令,控制执行器工作。
第11页,共14页。
(3)输出电路
组成:信号处理电路 和驱动电路
作用:根据微处理器的 控制信号工作,使执行器 按微处理器的指令动作。
第12页,共14页。
5. 执行机构
(1)电磁类执行机构:产生电磁力完成控制动作。
新能源汽车动力系统控制技术 ppt课件

控制系统开发流程
Page 7
控制系统开发管理流程介绍
控制系统开发管理流程概述
控制系统架构
Page 8
控制系统开发管理流程介绍
控制系统开发管理流程概述
单元测试及MIL测试
Page 9
控制系统开发管理流程介绍
控制系统开发管理流程概述
SIL及PIL测试
Page 10
控制系统开发管理流程介绍
Rational DOORs:是做需求管理的时候需要的产品,主要用于定制 和管理项目中的各种需求,可以与Change和Synergy工具无缝集成。
Rational Change:是做变更管理的时候需要的产品,主要用于定制 和管理项目中的各种工作流程以及变更流程。
5.3
NEDC (欧洲)
1181
33.6
74.6
3.9
JC08
1204
24.5
50.7
6.1
Page 18
控制系统开发管理流程介绍
基于模型的软件开发(MBD: Model Based Design)
项目繁多 各种类型产品,各种产品平台 产品种类不断增加
方案多样 每种产品多种配置方案 配置方案定期更新
New Energy
新能源汽车动力系统控制技术
新能源汽车动力系统控制技术
01
新能源汽车分类及构型介绍
02
纯电动汽车控制技术
03
混动汽车控制技术
04
控制系统开发管理流程
05
电控系统故障诊断
06
动力电池及其管理系统介绍(实操)
07
电机及整车控制系统介绍(实操)
Page 2
新能源汽车动力系统控制技术
04 04-01 04-02 04-03 04-04
Page 7
控制系统开发管理流程介绍
控制系统开发管理流程概述
控制系统架构
Page 8
控制系统开发管理流程介绍
控制系统开发管理流程概述
单元测试及MIL测试
Page 9
控制系统开发管理流程介绍
控制系统开发管理流程概述
SIL及PIL测试
Page 10
控制系统开发管理流程介绍
Rational DOORs:是做需求管理的时候需要的产品,主要用于定制 和管理项目中的各种需求,可以与Change和Synergy工具无缝集成。
Rational Change:是做变更管理的时候需要的产品,主要用于定制 和管理项目中的各种工作流程以及变更流程。
5.3
NEDC (欧洲)
1181
33.6
74.6
3.9
JC08
1204
24.5
50.7
6.1
Page 18
控制系统开发管理流程介绍
基于模型的软件开发(MBD: Model Based Design)
项目繁多 各种类型产品,各种产品平台 产品种类不断增加
方案多样 每种产品多种配置方案 配置方案定期更新
New Energy
新能源汽车动力系统控制技术
新能源汽车动力系统控制技术
01
新能源汽车分类及构型介绍
02
纯电动汽车控制技术
03
混动汽车控制技术
04
控制系统开发管理流程
05
电控系统故障诊断
06
动力电池及其管理系统介绍(实操)
07
电机及整车控制系统介绍(实操)
Page 2
新能源汽车动力系统控制技术
04 04-01 04-02 04-03 04-04
汽车电子控制技术 PPT课件

有经济性规律、动力性(又称运动型)规律,而且还有一般(日 常)规律、环境温度及随外界条件变化的规律等。
将车速V 和节气门开度α的组合分成一定数量的区域,
每个区域有不同的节气门开启速率程序值。当实际值大于它时, 为动力性规律,反之为经济性规律。
2. 信号输入装置
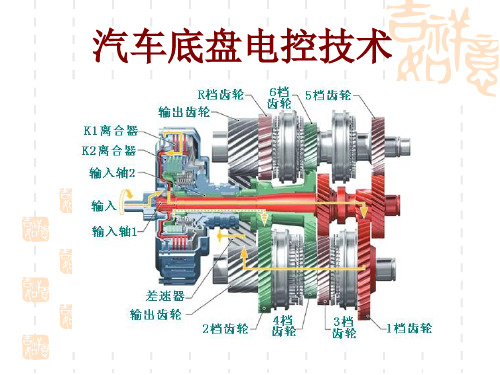
1) 节气门位置传感器 与发动机控制系统共用。 2) 发动机转速传感器 与发动机控制系统共用。 3) 车速传感器 与发动机转速传感器工作原理相同,有电磁感应式和光电式。 4) 输入轴转速传感器 作用:检测行星齿轮变速器输入轴转速,以更精确地控制换
向,摘下1挡, 进入空挡NR1; (2)使V7换向,选 挡液压缸动作, 使选挡杆从NR1进 入N23位置,挡位 信号接通,表示 选挡到位; (3)使换挡阀V5换 向,换挡液压缸 反向动作,从而 换入2挡;
(4)换挡开关接通, ECU令离合器接合, 发动机自适应地 恢复供油。
3. 发动机执行机构 对于电喷发
发散型在大节气门开度时换挡延迟所引起的输入轴转速 的变化较大、功率利用差,但换挡次数较少、舒适性高。
带强制低挡的发散型换挡规律,使它保持了换挡次数较少、 舒适性高的优点,又克服了发散型的缺点,故它在轿车自动变 速器中应用较多。
收敛型的发动机工作转速低、燃料经济性好、噪声低、行 驶平稳舒适,它适合于功率较低的货车。
或者当车速传感器损坏时,用输入轴转速传感器来控制换 挡。
输入轴转速传感器故障:ECU停止发动机减小转矩控制。 油液温度传感器出现故障:按80℃到100℃作为代替信号 控制。
② 执行机构失效 换挡电磁阀故障:两种处理方法: a、不论有几个阀出故障,ECU均停止所有换挡电磁阀工作,
挡位由操纵手柄决定; b、其中一个失效,其他阀仍工作,仍能自动换挡,但会失
将车速V 和节气门开度α的组合分成一定数量的区域,
每个区域有不同的节气门开启速率程序值。当实际值大于它时, 为动力性规律,反之为经济性规律。
2. 信号输入装置
1) 节气门位置传感器 与发动机控制系统共用。 2) 发动机转速传感器 与发动机控制系统共用。 3) 车速传感器 与发动机转速传感器工作原理相同,有电磁感应式和光电式。 4) 输入轴转速传感器 作用:检测行星齿轮变速器输入轴转速,以更精确地控制换
向,摘下1挡, 进入空挡NR1; (2)使V7换向,选 挡液压缸动作, 使选挡杆从NR1进 入N23位置,挡位 信号接通,表示 选挡到位; (3)使换挡阀V5换 向,换挡液压缸 反向动作,从而 换入2挡;
(4)换挡开关接通, ECU令离合器接合, 发动机自适应地 恢复供油。
3. 发动机执行机构 对于电喷发
发散型在大节气门开度时换挡延迟所引起的输入轴转速 的变化较大、功率利用差,但换挡次数较少、舒适性高。
带强制低挡的发散型换挡规律,使它保持了换挡次数较少、 舒适性高的优点,又克服了发散型的缺点,故它在轿车自动变 速器中应用较多。
收敛型的发动机工作转速低、燃料经济性好、噪声低、行 驶平稳舒适,它适合于功率较低的货车。
或者当车速传感器损坏时,用输入轴转速传感器来控制换 挡。
输入轴转速传感器故障:ECU停止发动机减小转矩控制。 油液温度传感器出现故障:按80℃到100℃作为代替信号 控制。
② 执行机构失效 换挡电磁阀故障:两种处理方法: a、不论有几个阀出故障,ECU均停止所有换挡电磁阀工作,
挡位由操纵手柄决定; b、其中一个失效,其他阀仍工作,仍能自动换挡,但会失
汽车电控技术完整版课件全套ppt教程(最新)

汽车电控技术
绪论
一、现代汽车电子技术应用状况
❖ 2.在底盘上的应用
❖ 1.在发动机上的应用
❖ (1)电控自动变速器(ECT)
❖ (1)电子控制喷油装置(EFI) ❖ (2)电子转向助力系统
❖ (2)电控点火系统(ESA) ❖ (3)汽车防滑控制系统
❖ (3)怠速控制系统(ISC) ❖ (4)适时调节的自适应悬挂系统
❖ 电控汽油喷射系统的分类与组成 ❖ 电控汽油喷射发动机空气供给系统的组成、结构、工作原理 ❖ 电控汽油喷射发动机燃油供给系统的组成、结构、工作原理 ❖ 电控汽油喷射发动机电子控制系统的组成、结构、工作原理 ❖ 智能型电子节气门的结构、工作原理 ❖ 汽油机缸内直喷系统的结构、工作原理
1.1 概述
❖ 1.1.1 电控汽油喷射系统的分类
❖ 1.1.2 电控汽油喷射系统的组成
❖ 电控汽油喷射系统由3个子系统组成: ❖ 空气供给系统 ❖ 燃油供给系统 ❖ 电子控制系统
❖ 电子控制系统 ❖ 传感器 ❖ 开关信号 ❖ 电子控制单元 ❖ 执行器
1.2 电控汽油喷射的空气供给系统
❖ 1.2.1 空气计量装置
❖ 1.空气流量计(AFS)
❖ (4)电控柴油喷射系统
❖ (5)自适应巡航控制系统(ACC)
二、汽车电子技术应用的发展趋势
❖ 1.微处理机技术 ❖ 2.传感器技术 ❖ 3.软件新技术应用 ❖ 4.智能汽车及智能交通系统(ITS)的研究及应用 ❖ 5.数据传输载体方面的电子新技术应用 ❖ 6.汽车车载电子网络
第1章 电子控制汽 油喷射系统
❖ 电控汽油喷射系统对汽油泵运转控制的基本要求是:只有当 发动机处于运转状态时,汽油泵才运转,若发动机不工作, 即使接通点火开关,汽油泵也不工作。
绪论
一、现代汽车电子技术应用状况
❖ 2.在底盘上的应用
❖ 1.在发动机上的应用
❖ (1)电控自动变速器(ECT)
❖ (1)电子控制喷油装置(EFI) ❖ (2)电子转向助力系统
❖ (2)电控点火系统(ESA) ❖ (3)汽车防滑控制系统
❖ (3)怠速控制系统(ISC) ❖ (4)适时调节的自适应悬挂系统
❖ 电控汽油喷射系统的分类与组成 ❖ 电控汽油喷射发动机空气供给系统的组成、结构、工作原理 ❖ 电控汽油喷射发动机燃油供给系统的组成、结构、工作原理 ❖ 电控汽油喷射发动机电子控制系统的组成、结构、工作原理 ❖ 智能型电子节气门的结构、工作原理 ❖ 汽油机缸内直喷系统的结构、工作原理
1.1 概述
❖ 1.1.1 电控汽油喷射系统的分类
❖ 1.1.2 电控汽油喷射系统的组成
❖ 电控汽油喷射系统由3个子系统组成: ❖ 空气供给系统 ❖ 燃油供给系统 ❖ 电子控制系统
❖ 电子控制系统 ❖ 传感器 ❖ 开关信号 ❖ 电子控制单元 ❖ 执行器
1.2 电控汽油喷射的空气供给系统
❖ 1.2.1 空气计量装置
❖ 1.空气流量计(AFS)
❖ (4)电控柴油喷射系统
❖ (5)自适应巡航控制系统(ACC)
二、汽车电子技术应用的发展趋势
❖ 1.微处理机技术 ❖ 2.传感器技术 ❖ 3.软件新技术应用 ❖ 4.智能汽车及智能交通系统(ITS)的研究及应用 ❖ 5.数据传输载体方面的电子新技术应用 ❖ 6.汽车车载电子网络
第1章 电子控制汽 油喷射系统
❖ 电控汽油喷射系统对汽油泵运转控制的基本要求是:只有当 发动机处于运转状态时,汽油泵才运转,若发动机不工作, 即使接通点火开关,汽油泵也不工作。
汽车电子控制技术PPT课件

精选ppt
52
2 霍尔式传感器结构及工作原理
结构原理分析:
此传感器为霍尔
效应式传感器,由
永久磁铁、霍尔元
件、信号轮、集成
磁铁
放大电路等组成。
叶轮在转动时“间 断”地阻挡磁场, 使得霍尔元件间断 地产生高低变化的 矩形波信号。
霍尔元件及 放大电路
b)磁路接通时
精选ppt
叶轮 a)磁路截断时
53
2)工作原理
叶片进入气隙,磁场被旁路,霍尔电压为0,输出高电平 叶片离开气隙,磁场穿过霍尔元件,产生霍尔电压,输出 低电平。
精选ppt
54
(5)霍尔效式传感器检修
一、常见故障:排放超标,油耗增加或运行不良等。 二、霍尔效应式传感器及其信号检查 2、线路及信号的确认:
1)拔下插座,打开点火开关,测量霍尔传感器 的三个接线端与搭铁之间的电压,应为12V或5V电 源,12V或5V信号参考电压,0V接地。任一不正 常应检查相关的电路。 2)用万用表检测信号输出电压是否正常;一般怠 速时约为2.5V或6.0V左右。人为触发时为0V和5V 间或0和12V间变化。
精选ppt
2
四、汽车电子控制系统的类型
按控制器的 结构与工作 方式分
按控制器所 具有的功能 分
模拟控制系统 由模拟电路组成,精度低, 灵活性差
数字控制系统
核心是微处理器,精度高, 扩展灵活
单功能控制系统
控制功能单一,微处理器独 立,如点火控制系统,燃油
喷射控制系统等。
多功能控制系统
具有多种控制功能,如发动 机集中控制系统,动力总成
2.测信号电压: 拆下进气歧管处的真空软管,并接在真空枪上,接通点火开 关,测信号端子PIM与搭铁E2间的信号电压,应符合标准值。
汽车车身电控技术课件19灯光照明系统

26
27
二大灯串联日间灯: 发电机发电、手刹松
28
灯开关:大灯近光 只有近光灯亮
29
灯开关:大灯、远光: 近光灯、远光灯亮
30
31
32
33
34
35
36
37
38
39
顶灯、阅读灯、后备箱照明灯 进车照明系统 车内灯提示系统
40
室内灯
41
42
一、前照灯 二、雾灯 三、牌照灯、尾灯、小灯、仪表灯 四、车内照明系统
8
远光灯:功率较大(45~60W)灯丝位于焦点 处,光线远而亮。
近光灯:功率较小(22~55W)灯丝位于焦点 上方稍偏右,光线弱且大部分向下倾斜。
9
远光灯:灯丝位于焦 点处。
近光灯:灯丝位于焦 点前方稍高于光学轴 线,且下方安装有金 属遮光罩。
10
11
(1)无大灯继电器又无变光继电器系统(双无) (2)有大灯继电器但无变光继电器系统 (3)既有大灯继电器又有变光继电器系统
4
反光镜 配光镜 光源(灯泡)
5
反光镜
反光镜的作用是最大限度地将灯泡发出的光线聚合成强光 束,以增加照射距离。它一般呈抛物面状,内表面镀铬、铝 或银, 然后抛光,目前多采用真空镀铝。
灯丝位于反射镜的焦点处,其大部分光线经反射后,成为平 行光束射向远方, 其距离可达150m或更远。
6
配光镜
12
双无
13
有 大 灯 继 电 器
14
有双继电器
15
16
17
18
19
20
21
普通卤素灯的发光原理是用钨丝发热发光,而钨丝在长久 的高热下,难保不烧断损坏;而氙气灯是利用电流刺激气 体发光,基本上不会产生过高温度,只要其中的氙气没用 完,它就可以一直正常发光,不易损坏!
27
二大灯串联日间灯: 发电机发电、手刹松
28
灯开关:大灯近光 只有近光灯亮
29
灯开关:大灯、远光: 近光灯、远光灯亮
30
31
32
33
34
35
36
37
38
39
顶灯、阅读灯、后备箱照明灯 进车照明系统 车内灯提示系统
40
室内灯
41
42
一、前照灯 二、雾灯 三、牌照灯、尾灯、小灯、仪表灯 四、车内照明系统
8
远光灯:功率较大(45~60W)灯丝位于焦点 处,光线远而亮。
近光灯:功率较小(22~55W)灯丝位于焦点 上方稍偏右,光线弱且大部分向下倾斜。
9
远光灯:灯丝位于焦 点处。
近光灯:灯丝位于焦 点前方稍高于光学轴 线,且下方安装有金 属遮光罩。
10
11
(1)无大灯继电器又无变光继电器系统(双无) (2)有大灯继电器但无变光继电器系统 (3)既有大灯继电器又有变光继电器系统
4
反光镜 配光镜 光源(灯泡)
5
反光镜
反光镜的作用是最大限度地将灯泡发出的光线聚合成强光 束,以增加照射距离。它一般呈抛物面状,内表面镀铬、铝 或银, 然后抛光,目前多采用真空镀铝。
灯丝位于反射镜的焦点处,其大部分光线经反射后,成为平 行光束射向远方, 其距离可达150m或更远。
6
配光镜
12
双无
13
有 大 灯 继 电 器
14
有双继电器
15
16
17
18
19
20
21
普通卤素灯的发光原理是用钨丝发热发光,而钨丝在长久 的高热下,难保不烧断损坏;而氙气灯是利用电流刺激气 体发光,基本上不会产生过高温度,只要其中的氙气没用 完,它就可以一直正常发光,不易损坏!
汽车底盘电控技术——PPT课件
汽车底盘电控技术
目录
前言 ▪ 一、底盘电控系统总体认识 ▪ 二、电控制动集成控制系统 ▪ 三、自动变速器的结构与检修 ▪ 四、电控悬架系统 ▪ 五、电控动力转向系统 ▪ 六、底盘修竣检验
前言
课程特色: 汽车底盘电控技术是高等职业技术学校汽车专业的专业基础必 修课程。 本课程采用案例式教学,即在整车底盘电控系统的框架内,系 统地讲授相关基础理论,同时结合实验实训设备,重点培养实践操 作能力,知识应用能力和职业素养,适应市场和企业的实际需求。 每个部分的学习任务按照“理论基础”→“实践操作”→“任务工 单”的思路进行编写,实践操作环节按维修厂的实际维修流程编写。 既阐述了底盘电控系统的组成结构与工作原理,又介绍了各系统与 主要零部件的检修方法和实践操作,便于“理实一体化”的任务式 教学实施,提高教学效果。
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 常规制动过程
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 减压过程
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 保压过程
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 增压过程
▪ 可变容积式调节器 ➢ 常规制动过程
电控制动系统的发展
概述
▪ 电控制动系统的发展 ➢ ABS防抱死制动系统 ➢ BAS辅助制动系统(奔驰/宝马) ➢ CBC弯道制动控制系统(宝马) ➢ DSC动态行车稳定系统(宝马) ➢ DTC动态牵引力控制系统(宝马) ➢ EBD电子制动力分配系统(大众/现代) ➢ EDL、EDS电子差速锁止系统 ➢ ESP电子稳定程序(奔驰、奥迪) ➢ TCS驱动防滑控制系统(现代)
概述
电控制动系统关系图
目录
前言 ▪ 一、底盘电控系统总体认识 ▪ 二、电控制动集成控制系统 ▪ 三、自动变速器的结构与检修 ▪ 四、电控悬架系统 ▪ 五、电控动力转向系统 ▪ 六、底盘修竣检验
前言
课程特色: 汽车底盘电控技术是高等职业技术学校汽车专业的专业基础必 修课程。 本课程采用案例式教学,即在整车底盘电控系统的框架内,系 统地讲授相关基础理论,同时结合实验实训设备,重点培养实践操 作能力,知识应用能力和职业素养,适应市场和企业的实际需求。 每个部分的学习任务按照“理论基础”→“实践操作”→“任务工 单”的思路进行编写,实践操作环节按维修厂的实际维修流程编写。 既阐述了底盘电控系统的组成结构与工作原理,又介绍了各系统与 主要零部件的检修方法和实践操作,便于“理实一体化”的任务式 教学实施,提高教学效果。
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 常规制动过程
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 减压过程
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 保压过程
概述
▪ 循环式调节器,ABS工作原理(三位三通电磁阀) ➢ 增压过程
▪ 可变容积式调节器 ➢ 常规制动过程
电控制动系统的发展
概述
▪ 电控制动系统的发展 ➢ ABS防抱死制动系统 ➢ BAS辅助制动系统(奔驰/宝马) ➢ CBC弯道制动控制系统(宝马) ➢ DSC动态行车稳定系统(宝马) ➢ DTC动态牵引力控制系统(宝马) ➢ EBD电子制动力分配系统(大众/现代) ➢ EDL、EDS电子差速锁止系统 ➢ ESP电子稳定程序(奔驰、奥迪) ➢ TCS驱动防滑控制系统(现代)
概述
电控制动系统关系图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车电子控制技术
.
7.3.4发动机转矩调节与限滑差速器组合方式
为了让ABS在最佳状态工作,希望各轮独立旋转。安 装定比差速器锁定装置在非对称路面有利于提高 车辆的驱动力。但在其它路面条件,则不利于ABS 实现最佳控制,在车辆转向时也存在不利影响。
BOSCH研制了一种主动式限滑差速锁定装置,通过主 动控制,可使锁止程度在(0%~l00%)范围变化。当 限滑差速器不起作用时,允许两轮独立旋转。当完 全锁定时,两轮成为一个整体一起旋转。根据路面 状况,可任意控制锁止程度。在非对称路面条件具 有较好的效果。但LSD在正常路面对驱动控制并无 明显的作用,故它基本上不能单独用作ASR控制,通 常和发动机转矩调节方式组合使用。
同方法的性能比较如下:
汽车电子控制技术
.
实现ASR控制的各种不同方法的性能比较
性能指标控制方式 操纵性稳定性 驱动力 舒适性 传动系载WD
荷 翟度
节气门
―― (-) ++ ++ ++ +
喷油+点火时I司
+ ++ 0 0 0 ++
制动(单轮)
+ + ++ ―― ――* —
节气门+制动(单轮)
• 这里需要再说明的一点是:ASR控制与ABS控制类似 的地方,就是在非对称路面提高驱动力与方向稳定 性是矛盾的,最大限度地利用高附着系数路面一侧 的驱动力,必然降低车辆的方向稳定性。在这种工 况,既使车辆没有转向要求,也可能会使车辆偏离 期望的行驶方向。
汽车电子控制技术
.
• 为此驾驶员必须通过方向盘产生纠偏力矩以抵消 非稳态力矩(由两侧驱动力之差产生)的影响。
对ASR非常重要的输人信息是车轮的旋转
速度(驱动轮和被动轮)。当采用燃油喷
射和点火时间调节发动机转矩方式时,
ABS/ASR-ECU和发动机的ECU可相互传递
信息。由被动轮和驱动轮的转速可计算
出驱动轮的滑转率为:
DRDN
汽车电子控制技术
. DR
• 设驱动轮的期望滑转率为λe,则发动机 转矩控制的依据为∶
汽车电子控制技术
.
(1)驾驶员的动作和他的意图是否能达到一致, 这通常由驾驶员的经验和反应速度决定。
(2)系统是否处在可控状态。
• 导致汽车运动状态失控的主要因素是轮胎和 路面间的摩擦系数。要使汽车处在可控的状 态,车轮的滑转或滑移率必须控制在允许的 范围之内。要及时精确控制车轮的滑转或滑 移率在允许的范围之内,驾驶员的反应速度 往往达不到要求,于是采用比人工响应速度 快,精度高的自动控制系统已成为提高汽车 的经济性、主动安全性的必然的趋势。
为了防止侧滑,就必须适当降低驱动力,提高
抵抗侧滑的能力。ASR和ABS都是为了增加汽
车抗侧滑能力的装置,但ASR不是把车轮的滑
转率控制在μ-λ曲线的峰值点,只是减小驱
动力,提高侧向力的极限能力,在这一点与
ABS也是不同的。
汽车电子控制技术
.
7.3 ASR的控制方法
7.3.1发动机转矩调节方式
l.控制燃油喷射和点火时间
• 当车辆在高速行驶时,驾驶员是否能作出及时正确 的反应,并把车辆的行驶方向控制在期望的状态, 这是ASR控制系统无法保证的。从这一方面说,ASR 系统只是通过它的控制作用,保证车辆处在一个可 控的状态。而能否准确控制车辆的行驶方向,则取 决于驾驶员的心理状态、技术的熟练程度等多种 因数。要主动实现车辆行驶方向的稳定性,就必须 采用综合控制系统。如增加方向盘转角信号传感 及导向轮转角偏转驱动机构,构戚车辆行驶方向闭 环自动控制系统,在各种路面条件下就可实现车辆 方向稳定性的主动控制。
λ> λe 减小发动机转矩
λ< λe 增加发动机转矩
减小发动机转矩输出的最简单方法是按一 定的顺序停止向气缸喷射燃油,也可中断 对某一缸的点火。但中断点火会把没有 燃烧的燃油排出气缸,降低了燃料经济性 并加剧了对空气的污染。
供油中断法和点火延迟控制组合起来,可获 得更好的效果。但相应的发动机管理系 统应满足以下条件:
++ ++ ++ + + ——
节气门+喷油、点火时间 ++ ++ 0 + + +
节气门+喷油、点火+LDS ++ ++ +(+) + + ―――
注:*:仅在低速下是可行的;++:很好;+(+):好;RWD:后轮驱动;FWD:
-前轮驱动;+:较好;0:一股; -:不好;--:很不好;----:非常不好;LDS:限滑差速器
汽车电子控制技术
.
• ASR系统的节气门总成由主、副节气门组 成,主节气门由驾驶员通过加速踏板控制, 在主节气门的上流的副节气门通常由机 械回位弹簧维持在最大开度。进人ASR工 作模式,副节气门的开度由一步进电机控 制。由于把副节气门从全开位置驱动到 全闭位置要花一定的时间(约为200ms), 所以用节气门调节发动机的输出转矩时 滞大,响应也较慢。
(4)在气缸工作中断期间,由于在进气管上有未燃烧的 蒸发油膜。所以当该缸重新进人工作时,应对喷油 量进行调节以保证可靠燃烧。
(5)在气缸中断工作期间,应关闭环排放控制系统的作 用,否则未燃烧缸排出的过量氧气会使排放传感器 作出错误的判断。
汽车电子控制技术
.
• 采用喷油中断法减小发动机的输出转矩 非常简单.不需要增添其它硬件设备。驱 动控制试验已经证实,借助于ASR控制软 伴,在各种路面条件下,它都能保证车辆 行驶的方向稳定性和操纵住。它不仅适 用于前轮驱动车辆,也适用于后轮驱动车 辆。但是这种方法在ASR工作模式下噪声 偏大,振动比较厉害,发动机运转不平稳。 并且,它只能适用于燃油顺序喷射电控发 动机。
汽车电子控制技术
.
• 采用单一的节气门控制,结构简单,便于实现,它不 会对传动系带来任何附加载荷,舒适性也好,但驱 动控制的效果不好。
• 单独采用制动方式,多余的功率都得以热的形式在 制动器上消耗掉。因而发热严重,不宜在高速下和 长时间使用。此外在制动时对传动件和轴等产生 附加动载荷,引起传动轴的振动和噪声。
第7章 驱动控制
• 7.1概述
• 随着交通量的增加和车速的提高,驾驶员 对汽车的起步性能和操纵性能的要求日 益提高。
• 根据路面条件,驾驶员通过操纵油门、方 向盘及制动踏板,使汽车按照他的意图行 驶。汽车作为被控对象,由路面条件和驾 驶员的控制作用决定了它的真实运动状 态。汽车真实的运动状态是否与驾驶员 的意图一致,则取决于两个条件:
汽车电子控制技术
.
(l)发动机管理系统是燃油顺序喷射电子控制系统 (Sequential Fuel Injection,记为SEFI)。
(2)一进人ASR控制模式,下一个未进行工作过程的气 缸就得中断供油,以保证发动机输出转矩尽快地下 降。
(3)已经进人工作状态的气缸,为了保证混合气的充分 燃烧,不得中断供油。
• 两种综合性能好的组合方式分别为发动机与制动 组合、发动机与限滑差速器组合。
• 由于现代车辆通常都有ABS系统,很容易就可把ABS 扩充到ASR方式,不需耍添加更多的硬件设备。而 采用发动机与限滑差速器组合,需要不同的液压驱 动装置和控制系统,成本较高。
汽车电子控制技术
.
• 所以,发动机与制动器组合是ASR(TRC)系统的最佳 组合方式和最完备的硬件配置形式。只要采用合 理的控制算法,充分发挥发动机控制和制动控制的 优势,它完全可以满足车辆在各种路面条件的驱动 控制的要求,使车辆的方向稳定性、操纵性、舒适 性和加速性达到最佳状态。
汽车电子控制技术
.
一股采用三次多项式就可达到满意的精度。
(2)传动系模型。
(3)车辆模型。
(4)ASR系统。
2.ASR逻揖控制算法
防滑控制系统也可采用类似于ABS的逻辑 门限方式。这种控制算法简单,可靠性强, 便于实现。另外防滑控制与防抱死制动 集成于-体,算法类似,可以大大简化程序 结构。
汽车电子控制技术
(1)控制算法
(2)初始角ai的自适应控制。
(3)阶跃关闭节气门开度。
汽车电子控制技术
.
(4)爬行转矩的驱动控制。
(5)自适应反馈增益。
(6)总体控制策略。
(7)驱动控制的性能。
7.3.2采用制动方式的驱动控制
l.ASR系统建模
(1)发动机模型。研究ASR制动方式,并不涉 及发动机的控制问题,因而可把发动机当作 一个固定特性的动力装置。最常用的方法就 是根据发动机的试验数据,采用多项式拟合 发动机的稳态转矩与转速之间的关系曲线。
汽车电子控制技术
.
• 目前通常采用以下两种方法防止驱动轮滑转。
(1)制动控制方式。对将要空转的驱动轮施加制动 力,把发动机输出的多余转矩在制动器上消耗掉, 控制车轮的滑转率在期望的范围内。
(2)发动机转矩控制方式。调节发动机输人到驱动 轮上的转矩,使车轮的滑转率在合适的范围。
• 制动控制方式比发动机控制方式响应速度快, 能有效地防止汽车起步时或者从高μ路面突然跃 变到低μ路面时车轮的空转。制动控制方式还能 对每个驱动轮进行独立控制,与差速器锁止装置 具有同样的功能。发动机控制方式则是根据路面 状况输人给驱动轮最佳的驱动力矩,具体方法有 改变燃料喷射量、点火时间和节气门开度。
汽车电子控制技术
.
ABS是防止制动过程中车轮被抱死,保持方向稳 定性、操纵性并缩短制动距离的装置。而驱 动控制装置(Anti-Skidding Restraint,
Traction Control,Acceleration Slip Regulation,简称ASR或TRC)的作用是防止汽 车在加速、起步过程中的滑转,特别防止汽 车在非对称路面或在转弯时驱动轮的空转, 是保持方向稳定性、操纵性和最佳驱动力的 装置。可以说在利用μ-λ曲线的性质,并把 滑转/移率控制在某一范围,这两者是一致的。 ABS控制的是车轮的滑移率,而ASR控制是车 轮的滑转率。