数控机床进给伺服系统
数控机床进给伺服系统类故障诊断与处理(3篇)

数控机床进给伺服系统类故障诊断与处理数控机床进给伺服系统是数控机床中非常关键的一个组成部分,它直接影响机床加工的精度和效率。
然而,在使用过程中,由于各种原因,进给伺服系统可能会出现故障。
本文将介绍数控机床进给伺服系统的常见故障及其诊断与处理方法。
一、数控机床进给伺服系统常见故障1. 运动不平稳:机床在加工工件时,出现运动不平稳的情况,可能是由于进给伺服系统的故障引起的。
这种情况表现为运动过程中有明显的抖动或者不稳定的现象。
2. 运动失效:机床无法正常运动,不响应操作指令。
这种情况可能是由于进给伺服系统的电源故障、控制器故障或者连接线路故障引起的。
3. 位置误差过大:机床在加工过程中,位置误差超过了允许范围,导致加工工件的尺寸不准确。
这种情况可能是由于进给伺服系统的位置反馈元件(如编码器)故障引起的。
4. 加工速度过慢:机床在加工时,进给速度远低于预设值,导致加工效率低下。
这种情况可能是由于进给伺服系统的电机故障或者速度控制回路故障引起的。
二、故障诊断与处理方法1. 运动不平稳的诊断与处理:首先,检查机床的润滑系统,确保润滑油是否充足,并且清洁。
其次,检查机床的传动系统,确保螺杆和导轨的润滑良好。
如果问题还未解决,可以通过检查进给伺服系统的控制器参数是否正确、电机驱动器是否正常工作等方式进一步诊断。
2. 运动失效的诊断与处理:首先,检查进给伺服系统的电源供应情况,确保电源正常。
其次,检查进给伺服系统的连接线路,包括电源线、编码器连接线等,确保线路没有松动或者断裂。
如果问题还未解决,可以通过检查进给伺服系统的控制器和电机驱动器是否正常工作等方式进一步诊断。
3. 位置误差过大的诊断与处理:首先,检查进给伺服系统的位置反馈元件,如编码器是否损坏或者松动。
如果问题还未解决,可以通过检查进给伺服系统的控制器参数是否正确、电机驱动器是否正常工作等方式进一步诊断。
4. 加工速度过慢的诊断与处理:首先,检查进给伺服系统的电机是否正常工作,包括电机是否有异常声音或者发热等。
CK6140数控车床主传动系统及进给伺服系统设计
__届毕业(设计)论文题目CK6140数控车床主传动系统及进给伺服系统设计专业班级学号学生姓名随笔客指导教师指导教师职称学院名称机电工程学院完成日期: 2014 年 5 月 25日CK6140数控车床主传动系统及进给伺服系统设计CK6140 CNC lathe main drive system and feed servo system design学生姓名指导教师摘要本文介绍了CK6140数控车床的组成及工作原理,对数控机床的主要组成部分:机床主轴箱,进给伺服系统及主轴PLC控制进行了总体的设计及其详细设计。
数控机床是现代机电一体化的典型产品,对提高零件的加工质量和加工效率具有较好的作用。
在本次设计中,主要完成了以下工作:根据给出的要求,首先确定设计要求给出的已知条件确定电机的型号和功率,传动系统的布局,变速方式,开停方式,换向方式,制动方式及齿轮的排列与布置。
然后根据转速范围及级数确定它的转速图、各齿轮的齿数和传动系统简图。
在根据已确定传动比来确定带传动。
通过轴的初步设计,进行齿轮的设计和校核。
选取相应的轴承和键,进行轴的具体设计和校核,键和轴承的设计和校核。
最后进行装配图和各个零件图的绘制,完成主轴箱的设计。
然后完成伺服系统的设计。
在对进给伺服系统进行设计时,要确定进给传动系统的传动方式及控制系统的形式。
设计中,选择进给伺服系统为开环控制系统。
通过给定的参数选择好步进电机的步距角可确定传动齿轮的传动比及滚珠丝杆的导程。
设计的进给伺服系统能够满足设计任务的要求。
关键词:数控机床主轴箱进给伺服系统AbstractThis thesis introduced the constitution and working principle of CK6140 machine tool,the primarily parts of NC machine tool designed:including proceeds the total design and detailed design. NC machine tool is a modern machine to give or get an electric shock the integral whole the typical model of technique the processing of product, right exaltation spare parts the quantity with process the efficiency to have the good function. In this design,primarily completed following work.According to the timetable to design. First identified design requirements given the known conditions determine the type and electrical power, drivetrain system layout, speed change, stop the way for the way braking and gear configuration and the way layout. Based on rotational speed and scope of the class to determine its rotational speed maps, the various gear and drivetrain system Chishu sketch. In accordance with established transmission belt transmission than to determine. Through axle of the preliminary design, gear design and verification. The bearings and get used to a specific axle design and verification, design and verification keys and bearings. Final assembly of the various parts and mapping. Completed the design of headstock.Then completing the design of the servomechanism system. In designing of servo system, we can determine driving mode of driving system and controlling mode of controllingsystem,choosing the servo system for opening wreath control the system.Passing the parameter to settle the choice the good step the step for the electrical engineering the distance cape can make sure to spread to move the spreading of wheel gear to move the radio the roll the bead silk the think stick's lead. Design of into give the servo system can satisfy to designthe request of the mission.Keywords:NC Machine Tool;Axis Housing;Servomechanism目录摘要 (Ⅰ)Abstract (Ⅱ)第一章卧式数控车床简介 (1)1.1数控车床简介 (1)1.2 CK6140介绍及设计说明 (2)1.3设计任务 (3)第二章 CK6140总体设计计算 (6)2.1总体设计要求 (6)2.2机床的总体布局的确定 (7)2.3换向方向的选择 (7)2.4开停方式选择 (8)2.5 制动方式选择 (8)2.6 齿轮布置与排布 (8)2.7 变速方式选择 (9)2.8进给系统的组成及选用 (10)第三章主变速箱总体设计 (12)3.1电机的选用 (12)3.2传动方案的拟定 (15)3.3确定各级的转速.................................... 错误!未定义书签。
数控机床纵向进给伺服系统设计综述
陕西科技大学目录1.1 设计任务 (2)1.设计题目: (2)2.设计内容与要求 (2)1.2 总体方案设计 (2)1.2.1带有齿轮传动的进给运动 (2)1.3 机床进给伺服系统机械部分设计计算 (2)1.选择脉冲当量 (2)2.计算切削力 (2)1)纵车外圆 (2)2)横切端面 (2)3.滚珠丝杠螺母副的计算和选型 (3)1)纵向进给丝杠 (3)2)轴承选择。
(7)3)定位精度校核 (8)4.齿轮传动比计算。
(9)总结 (10)参考文献 (11)数控机床纵向进给伺服系统设计1.1 设计任务1.设计题目:数控机床纵向进给伺服系统设计2.设计内容与要求课题说明某一数控机床纵向进给伺服系统设计要求如下:纵向最大进给力为5000N,工作台重300Kg,工件及夹具的最大重量为500Kg,工作台纵向行程680mm,进给速度1~4000mm/min,快速速度15m/min。
导轨为矩形,表面粘贴聚四氟乙烯软带(摩擦系数为:0.04)。
要求的定位精度为±0.006mm。
设计内容——传动系统设计,主要包括运动转换机构、连接支撑方式等。
设计参数如下:(1)纵向行程:680mm(2)最大加工直径:在床面上 400mm在床鞍上 210mm(3)最大加工长度:1000mm(4)纵向进给速度:0.001~4m/min(5)纵向快速速度:15m/min(6)工作台重:300Kg(7)工件及夹具的最大重量:500Kg(8)摩擦系数为:0.04(9)代码制:ISO1.2 总体方案设计1.2.1带有齿轮传动的进给运动图1—1图1—2数控机床的伺服进给系统采用闭环系统,由于是数控机床纵向伺服系统,总体方案,从电动机出来带有齿轮传动,配上滚珠丝杠(采用滚珠丝杠可以提高系统的精度和纵向进给整体刚度)。
1.3 机床进给伺服系统机械部分设计计算1.选择脉冲当量根据设计任务书要求确定脉冲当量,纵向为0.01mm/步,横向为0.005mm/步(半径)。
第4章 数控机床伺服系统
第4章 数控机床伺服系统
第4章 数控机床伺服系统 工作原理:假设是单三拍通电工作方式。 (1)A 相通电时,定子A 相的五个小齿和转子对 齐。此时,B 相和 A 相空间差120,含 1 120/9 = 13 齿 3 2 A 相和 C 相差240,含240/ 9 = 26 个 3 齿。所以,A 相的转子、定子的五个小齿对 齐时,B 相、C 相不能对齐,B相的转子、 定子相差 1/3 个齿(3),C相的转子、定 子相差2/3个齿(6)。
mz2 k
式中:n —转速(r/min); f —控制脉冲频率,即每秒输入步进电动机的脉冲数; 由上式可知:工作台移动的速度由指令脉冲的频率所控制。
第4章 数控机床伺服系统 特点:
(1)来一个脉冲,转一个步距角。
(2)控制脉冲频率,可控制电机转速。
(3)改变脉冲顺序,改变方向。
种类:
有励磁式和反应式两种。两种的区别在于励磁式步进电机的转 子上有励磁线圈,反应式步进电机的转子上没有励磁线圈。
第4章 数控机床伺服系统
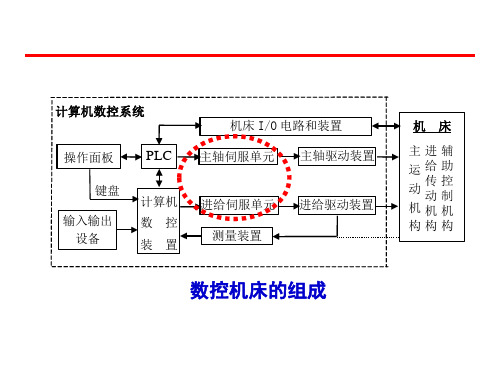
计算机数控系统 机床 I/O 电路和装置 操作面板 键盘 输入输出 设备 机 床
PLC
计算机 数 装 控 置
主轴伺服单元
主轴驱动装置
进给伺服单元 测量装置
进给驱动装置
主进辅 运给助 传控 动 动制 机机机 构构构
数控机床的组成
第4章 数控机床伺服系统
第4章
数控机床伺服系统
第4章 数控机床伺服系统
360o s mz2 k
第4章 数控机床伺服系统
每个步距角对应工作台一个位移值,这个位移值称为脉 冲当量。 因此,只要控制指令脉冲的数量即可控制工作台移动的 位移量。步距角越小,它所达到的位置精度越高,因此实际 使用的步进电动机一般都有较小的步距角。 步进电动机的转速公式为:n 60 f
数控机床的伺服系统

第6章 数控机床的伺服系统
伺服驱动装置
位置控制模块 速度控制单元
工作台 位置检测
速度环 速度检测 位置环
伺服电机
测量反馈
图6-1 闭环进给伺服系统结构
数控机床闭环进给系统的一般结构如图,这是一个双闭环系统,内 环为速度环,外环为位置环。速度环由速度控制单元、速度检测装置等构成。 速度控制单元是一个独立的单元部件,它是用来控制电机转速的,是速度控 制系统的核心。速度检测装置有测速发电机、脉冲编码器等。位置环是由 CNC装置中的位置控制模块、速度控制单元、位置检测及反馈控制等部分组 成。
第6章 数控机床的伺服系统
A C1 B4 2 B 3C A
逆时针转30º
C 4 B
A 1 2 3 A
B
C 1 B
A 2
B 3 C
C
逆时针转30º
4 A
第6章 数控机床的伺服系统
采用三相双三拍控制方式,即通电顺序按AB→BC→CA→AB(逆时针 方向)或AC→CB→BA→AC(顺时针方向)进行,其步距角仍为30。由于 双三拍控制每次有二相绕组通电,而且切换时总保持一相绕组通电,所以 工作比较稳定。
第6章 数控机床的伺服系统
设 A 相首先通电,转子齿与定子 A 、 A′ 对齐(图 3a )。然后在 A 相继续通电的情 况下接通 B 相。这时定子 B 、 B′ 极对转子 齿 2 、 4 产生磁拉力,使转子顺时针方向转 动,但是 A 、 A′ 极继续拉住齿 1 、 3 ,因 此,转子转到两个磁拉力平衡为止。这时转 子的位置如图 3b 所示,即转子从图 (a) 位 置顺时针转过了 15° 。接着 A 相断电, B 相继续通电。这时转子齿 2 、 4 和定子 B 、 B′ 极对齐(图 c ),转子从图 (b) 的位置又 转过了 15° 。其位置如图 3d 所示。这样, 如果按 A→A 、 B→B→B 、 C→C→C 、 A→A… 的顺序轮流通电,则转子便顺时针 方向一步一步地转动,步距角 15° 。电流 换接六次,磁场旋转一周,转子前进了一个 齿距角。如果按 A→A 、 C→C→C 、 B→B→B 、 A→A… 的顺序通电,则电机 转子逆时针方向转动。这种通电方式称为六 拍方式。
数控机床对伺服系统的要求

数控机床对伺服系统的要求(1) 精度高伺服系统的精度:输出量能复现输入量的精确程度。
伺服系统的位移精度:指令脉冲要求机床工作台进给的位移量和该指令脉冲经伺服系统转化为工作台实际位移量之间的符合程度。
两者误差愈小,位移精度愈高。
(2) 快速响应特性好快速响应是伺服系统动态品质的重要指标,它反映了系统跟踪精度。
机床进给伺服系统实际上就是一种高精度的位置随动系统,加工时为保证所要求的轮廓外形精度和的表面粗糙度,要求伺服系统跟踪指令信号的响应要快,跟随误差小。
(3) 调速范围要大调速范围:生产机械要求电机能供应的最高转速和最低转速之比。
在数控机床中,由于所用刀具、加工材料及零件加工要求的不同,为保证在各种状况下都能得到最佳切削条件,就要求伺服系统具有足够宽的调速范围。
既能满意高速加工要求,又能满意低速进给要求。
在低速切削时,还要求伺服系统能输出较大的转矩。
(4) 系统牢靠性要好系统的牢靠性常用发生故障时间间隔的长短的平均值作为依据,即平均无故障时间,这个时间越长牢靠性越好。
对主轴伺服系统,除上述要求外,还应满意如下要求:(1)主轴与进给驱动的同步掌握为使数控机床具有螺纹和螺旋槽加工的力量,要求主轴驱动与进给驱动实现同步掌握。
(2)准停掌握在加工中心上,为了实现自动换刀,要求主轴能进行高精确位置的停止。
(3)角度分度掌握角度分度掌握有两种类型:一是固定的等分角度掌握;二是连续的任意角度掌握。
任意角度掌握是带有角位移反馈的位置伺服系统,这种主轴坐标具有进给坐标的功能,称为“C”轴掌握。
“C”轴掌握可以用一般主轴掌握与“C”掌握切换的方法实现,也可以用大功率的进给伺服系统代替主轴系统。
数控机床对伺服系统的基本要求
数控机床对伺服系统的基本要求
1.精度高伺服系统的精度是指输出量能复现输入量的精确程度。
包括定位精度和轮廓加工精度。
2.稳定性好稳定是指系统在给定输入或外界干扰作用下,能在短暂的调整过程后,达到新的或者恢复到原来的平衡状态。
直接影响数控加工的精度和表面粗糙度。
3.快速响应快速响应是伺服系统动态品质的重要指标,它反映了系统的跟踪精度。
4.调速范围宽调速范围是指生产机械要求电机能供应的最高转速和最低转速之比,对于一般的数控机床而言,要求在辨别率为1μm 的状况下,进给伺服系统在0~24m / min进给速度范围内都能工作。
5.低速大转矩进给坐标的伺服掌握属于恒转矩掌握,在整个速度范围内都要保持这个转矩;主轴坐标的伺服掌握在低速时为恒转矩掌握,能供应较大转矩。
在高速时为恒功率掌握,具有足够大的输出功率。
对伺服电机的要求:
(1)调运范围宽且有良好的稳定性,低速时的速度平稳性;(2)电机应具有大的、较长时间的过载力量,以满意低速大转矩的要求;
(3)反应速度快,电机必需具有较小的转动惯量、较大的转矩、尽可能小的机电时间常数和很大的加速度(400rad / s2以上);
(4)能承受频繁的起动、制动和正反转。
数控机床进给伺服系统的组成和分类

机床加工,大多是低速时进行切削,即在低速时进给驱动要有大的转矩输出。
二、进给伺服系统的组成如图所示为数控机床进给伺服系统的组成。
从图中可以看出,它是一个双闭环系统,内环是速度环,外环是位置环。
位置环的输入信号是计算机给出的指令信号和位置检测装置反馈的位置信号,这个反馈是一个负反馈,即与指令信号的相位相反。
指令信号是向位置环送去加数,而反馈信号向位置环送去减数。
位置检测装置通常有光电编码器、旋转变压器、光栅尺、感应同步器或磁栅尺等。
它们或者直接对位移进行检测,或者间接对位移进行检测。
开环伺服系统开环伺服系统是最简单的进给伺服系统,无位置反馈环节。
如图所示,这种系统的伺服驱动装置主要是步进电动机、功率步进电动机、电液脉冲电动机等。
由数控系统发出的指令脉冲,经驱动电路控制和功率放大后,使步进电动机转动,通过齿轮副与滚珠丝杠螺母副驱动执行部件。
闭环伺服系统闭环伺服系统原理图如图所示。
系统所用的伺服驱动装置主要是直流或交流伺服电动机以及电液伺服阀—液压马达。
与开环进给系统最主要的区别是:安装在执行部件上的位置检测装置,测量执行部件的实际位移量并转换成电脉冲,反馈到输入端并与输人位置指令信号进行比较,求得误差,依此构成闭环位置控制。
由于采用了位置检测反馈装置,所以闭环伺服系统的位移精度主要取决于检测装置的精度。
闭环伺服系统的定位精度一般可达±0.01mm~±0.005 mm。
半闭环伺服系统半闭环伺服系统如图所示。
将检测元件安装在中间传动件上,间接测量执行部件位置的系统称为半闭环系统。
闭坏系统可以消除机械传动机构的全部误差,而半闭环系统只能补偿系统环路内部分元件的误差,因此,半闭环系统的精度比闭环系统的精度要低一些,但是它的结构与凋试都比较简单。
全数字伺服系统随着微电子技术、计算机技术和伺服控制技术的发展,数控机床的伺服系统已经开始采用高速度、高精度的全数字伺服系统。
使伺服控制技术从模拟方式、混合方式走向全数字方式。
数控技术 第七章 数控机床的进给伺服系统

三 步进电动机的基本控制方法
(2) 双电压功率放大电路 优点:功耗低,改善了脉冲 优点:功耗低, 前沿。 前沿。 缺点:高低压衔接处电流波 缺点: 形呈凹形, 形呈凹形,使步进电机 输出转矩降低, 输出转矩降低,适用于 大功率和高频工作的步 进电机。 进电机。
三 步进电动机的基本控制方法
(3) 斩波恒流功放电路 优点: 优点:1)R3较小(小 R3较小( 较小 于兆欧) 于兆欧)使整个 系统功耗下降, 系统功耗下降, 效率提高。 效率提高。 2)主回路不串 电阻, 电阻,电流上升 快,即反应快。 即反应快。 3)由于取样绕 组的反馈作用, 组的反馈作用, 绕组电流可以恒定在确定的数值上, 绕组电流可以恒定在确定的数值上,从而保证在很大频率范 围内,步进电机能输出恒定的转矩。 围内,步进电机能输出恒定的转矩。
二 数控机床对伺服系统的基本要求
1 高精度 一般要求定位精度为0.01~0.001mm; ; 一般要求定位精度为 高档设备的定位精度要求达到0.1um以上。 以上。 高档设备的定位精度要求达到 以上 2 快速响应 3 调速范围宽 调速范围指的是 max/nmin 。 调速范围宽:调速范围指的是 调速范围指的是:n 进给伺服系统:一般要求 进给伺服系统 一般要求0~30m/min,有的已达到 一般要求 ,有的已达到240m/min 主轴伺服系统:要求 主轴伺服系统 要求1:100~1:1000恒转矩调速 要求 恒转矩调速 1:10以上的恒功率调速 以上的恒功率调速
一 直流伺服电动机调速原理
7-30 直流电动机的机械特性
二 直流电动机的PWM调速原理 直流电动机的 调速原理
7-24 脉宽调制示意图 脉宽调制示意图
Ud =
τ
T
U = δ T U δ T 称为导通率
数控机床进给伺服系统的工作原理(共5张PPT)

进给伺服系统的工作原理
进给伺进服系给统伺的工服作系原理统是数控装置和机床主机的联系环节,接收CNC装置插补器发出的进给
数控装置插补信号输送到位置控制模块的位置比较电路,与位置检测反馈电路来的反馈信号相比较后,位置比较电路输出位置移动信号
机床完成进给运动。。 带动传动机构,最后转化为机床的直线或转动位移。
它接受来自数控装置的进给指令信号,经变换、调节和放大后驱动执行件,转化为直线或旋转运动。 进给伺服系统的工作原理 伺服系统 是指以机械位置或角度作为控制对象的自动控制系统。 伺服系统 是指以机械位置或角度作为控制对象的自动控制系统。
进 进给伺服系统的工作原理
它接受来自数控装置的进给指令信号,经变换、调节和放大后驱动执行件,转化为直线或旋转运动。 数控装置插补信号输送到位置控制模块的位置比较电路,与位置检测反馈电路来的反馈信号相比较后,位置比较电路输出位置移动信号
给 ,经位置控制和速度控制单元输出到速度环,直到机床完成进给运动。 比较控制环节 驱动控制单元 执行元件 进给伺服系统(Feed Servo System)——以移动部件的位置和速度作为控制量的自动控制系统,又称位置随动系统、驱动系统、伺服机 指 构或伺服单元。 令 机 进给伺服系统的工作原理 床 数控机床常见故障诊断与排除
,经位脉置控冲制或和速进度给控制位单移元量输出信到息速度,环经,直过到变机换床完和成放进给大运由动伺。 服电机带动传动机构,最后转化为机床的
伺服系统 是指以机械位置或角度作为控制对象的自动控制系统。
进给伺直服系线统或是数转控动装置位和移机。床主机的联系环节,接收CNC装置插补器发出的进给脉冲或进给位移量信息,经过变换和放大由伺服电机
数控机床的进给伺服系统概述

• 当步进电机励磁绕组相数大于3时,多相通电多数 能提高输出转矩。
• 所以功率较大的步进电机多数采用多于三相的励磁 绕组,且多相通电。
3、启动转矩Mq
AB C Mq
e
当电机所带负载ML<Mq时,电机可不失步的启动。
2、最高启动频率和最高工作频率
最高启动频率fg: 步进电机由静止突然启动,并不失步地进 入稳速运行,所允许的启动频率的最高值。 最高启动频率fg与步进电机的惯性负载J有 关。
故电动机的转速n为:
n f (r/s) 60 f (r/min) f ——控制脉冲的频率
mzk
mzk
SB-58-1型五定子轴向分相反应式步进电机。
• 定子和转子都分为5段,呈轴向分布;有16个 齿均匀分布在圆周上,
• 齿距=360º/16=22.5º;各相定子彼此径向错开 1/5个齿的齿距;
如按5相5拍通电,则步距角为:
4)电动机定子绕组每改变一次通电方式——称为一拍 5)每输入一个脉冲信号,转子转过的角度——步距角αº • 上述通电方式称为:三相单三拍。(三相三拍) • 单——每次通电时,只有一相绕组通电; • 双——每次通电时,有两相绕组通电; • 三拍——经过三次切换绕组的通电状态为一个循环; • 除此之外的通电方式还有: • 三相双三拍: AB—BC—CA—AB • 三相单双六拍: A—AB—B—BC—C—CA—A
第三节 数控机床的检测装置
1、检测装置的作用
• 检测装置是数控机床闭环伺服系统的重要组成部分 • 其作用是:检测位移和速度,发送反馈信号,构成
(1) 直线进给系统 已知:进给系统的脉冲当量δmm;步进电机的
步距角αº;滚珠丝杠的导程t mm;
求: 齿轮传动比 i。
数控机床的伺服系统

4.2 步进电动机驱动控制系统
4.2.3 步进电动机的驱动控制
1.步进电动机的工作方式 从一相通电换接到另一相通电称为一拍,每拍转子转过一个
步距角。按A→B → C → A → …的顺序通电时,电动机的转 子便会按此顺序一步一步地旋转;反之,若按A → C → B → A→…的顺序通电,则电动机就会反向转动,这种三相依次 单相通电的方式,称为三相单三拍式运行,“单”是指每次 只有一相绕组通电,“三拍”是指一个循环内换接了三次, 即A、B、C三拍。单三拍通电方式每次只有一相控制绕组通 电吸引转子,容易使转子在平衡位置附近产生振荡,运行稳 定性较差;另外,在切换时一相控制绕组断电而另一相控制绕 组开始
4.2.2 步进电动机的工作原理与主要特 性
1.步进电动机的工作原理
上一页 下一页 返回
4.2 步进电动机驱动控制系统
步进电动机的工作原理实际上是电磁铁的作用原理。下面以 图4-2所示的一个最简单步进电动机结构为例说明步进电动机 的工作原理。其定子上分布有6个齿极,每两个相对齿极装有 一相励磁绕组,构成三相绕组。
也称为数组的长度。
下一页 返回
6.1 一维数组
对数组的定义应注意以下几点。 (1)数组的类型实际上是指数组元素的取值类型。对于同一
个数组,其所有元素的数据类型都是相同的。 (2)数组名的书写规则应符合标识符的书写规定。 (3)数组名不能与其他变量名相同。 (4)不能在方括号中用变量来表示元素的个数,但是可以用
按伺服控制方式不同,数控机床伺服系统可分为开环、闭环 和半闭环系统。开环型采用步进电动机驱动,控制方式简单, 信号单向传递,无位置反馈,所以精度不高,适用于要求不 高的经济型数控机床中。而闭环控制系统采用直流、交流伺 服电动机驱动,位置检测元件安装于机床运动部件上,
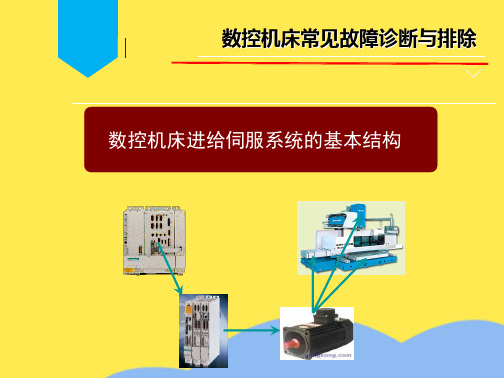
数控机床进给伺服系统的基本结构(共7张PPT)
。
速度控制模块
一进给伺服系统的结构
步进伺服系统原理图
伺服电机、速度检测装置、速度反馈比较环节、速度控制模块 数控机床常见故障诊断与排除 位置指令、位置检测装置、位置反馈比较环节、位置控制模块、速度控制环、机械传动装置 位置指令、位置检测装置、位置反馈比较环节、位置控制模块、速度控制环、机械传动装置 伺服电机、速度检测装置、速度反馈比较环节、速度控制模块 伺服系统的结构通常由位置控制环和速度控制环组成。 伺服电机、速度检测装置、速度反馈比较环节、速度控制模块 数控机床进给伺服系统的基本结构 驱动控制单元和驱动元件组成伺服驱动系统,机械传动部件和执行部件组成机械传动系统,检测元件和反馈电路组成检测装置(或称作检测系统) 。 驱动控制单元和驱动元件组成伺服驱动系统,机械传动部件和执行部件组成机械传动系统,检测元件和反馈电路组成检测装置(或称作检测系统) 。 伺服系统的结构通常由位置控制环和速度控制环组成。 位置指令、位置检测装置、位置反馈比较环节、位置控制模块、速度控制环、机械传动装置 驱动控制单元和驱动元件组成伺服驱动系统,机械传动部件和执行部件组成机械传动系统,检测元件和反馈电路组成检测装置(或称作检测系统) 。
数控机床常见故障诊断与排除 数控机床进给伺服系统的基本结构
一进给伺服系统的结构
数控机床的伺服系统一般由驱动元件、机械传动部件、执行部件和检测反馈环 节等组成。驱动控制单元和驱动元件组成伺服驱动系统,机械传动部件和执行部
件组成机械传动系统,检测元件和反馈电路组成检测装置(或称作检测系
统)。)。
一进给伺服系统的结构
制环 数控机床的伺服系统一般由驱动元件、机械传动部件、执行部件和检测反馈环节等组成。
伺服电机、速度检测装置、速度反馈比较环节、速度控制模块
数控机床进给系统..

数控机创进给系统数控机床的进给传动系统常用伺服进给系统来工作。
伺服进给系统的作用是根据数控系统传来的指令信息,进行放大以后控制执行部件的运动,不仅控制进给运动的速度,同时还要精确控制刀具相对于工件的移动位置和轨迹。
因此,数控机床进给系统,尤其是轮廓控制系统,必须对进给运动的位置和运动的速度两方面同时实现自动控制。
数控机床进给系统的设计要求除了具有较高的定位精度之外,还应具有良好的动态响应特性,系统跟踪指令信号的响应要快,稳定性要好。
一个典型的数控机床闭环控制的进给系统组成:位置比较、放大元件、驱动单元、机械传动装置和检测反馈元件等几部分。
机械传动装置:是指将驱动源旋运动变为工作台直线运动的整个机械传动链,包括减速装置、丝杠螺母副等中间传动机构。
第一节概述一、数控机床对进给传动系统的要求1.减少摩擦阻力:在数控机床进给系统中,普遍采用滚珠丝杠螺母副、静压丝杠螺母副,滚动导轨、静压导轨和塑料导轨。
2.减少运动惯量3.高的传动精度与定位精度设计中,通过在进给传动链中加入减速齿轮,以减小脉冲当量(即伺服系统接收一个指令脉冲驱动工作台移动的距离),预紧传动滚珠丝杠,消除齿轮、蜗轮等传动件的间隙等办法,可达到提高传动精度和定位精度的目的。
4.宽的进给调速范围:伺服进给系统在承担全部工作负载的条件下,应具有很宽的调速范围,以适应各工件材料、尺寸和刀具等变化的需要,工作进给速度范围可达3~6000mm/min(调速范围1:2000)。
5.响应速度要快:所谓快响应特性是指进给系统对指令输入信号的响应速度及瞬态过程结束的迅速程度,即跟踪指令信号的响应要快;定位速度和轮廓切削进给速度要满足要求;工作台应能在规定的速度范围内灵敏而精确地跟踪指令,进行单步或连续移动,在运行时不出现丢步或多步现象6.无间隙传动:进给系统的传动间隙一般指反向间隙,即反向死区误差,它存在于整个传动链的各传动副中,直接影响数控机床的加工精度。
因此,应尽量消除传动间隙,减小反向死区误差。
第7章 数控机床的进给伺服系统PPT课件

式中 J1、J2——齿轮的转动惯量(N·m·s2);J3——丝杠的转动惯量 d ——冲当量(mm/脉冲)。
然后进行负载启动频率fqF 的估算; 式中 fq——空载启动频率(Hz),T——由矩频特性决定的力矩(Nm)
J——电机转子转动惯量(N·m·s2)。 依照机床要求的启动频率fqF ,可选择fq
第七章 数控机床的进给伺服系统
7-1 概述 7-2 步进电动机及其驱动系统 7-3 直流伺服电动机及其速度控制 7-4 交流伺服电动机及其速度控制 7-5 主轴驱动 7-6 位置控制
§ 7-1 概述
立式铣床
加工中心 刀库刀具定位电机 机械手旋转定位电机
带制动器伺服电机 主轴电机
伺服电机
伺服驱动系统(Servo System)
称做空载运行频率fmax。它也是步进电动机的重要性能指标,对于提高 生产率和系统的快速性具有重要意义。
fmax 应能满足机床工作台最高运行速度。
6. 运行矩频特性 运行矩频特性T=f(F)是描述步进电动
机连续稳定运行时,输出转矩T与连续运行 T 频率之间的关系。它是衡量步进电动机运转 时承载能力的动态性能指标。
f
三、步进电动机驱动电源 1. 作用 发出一定功率的电脉冲信号,使定子励磁绕组顺序通电。 2. 基本要求 (1)电源的基本参数与电动机相适应; (2)满足步进电动机起动频率和运行频率的要求; (3)抗干扰能力强,工作可靠; (4)成本低,效率高,安装维修方便。
1.步距角 步进电动机每步的转角称为步距角,计算公式:
θ= 360 (°) Z mK
式中 m—步进电动机相数 Z—转子齿数 K—控制方式系数, K=拍数p/相数m
数控机床进给系统设计

数控机床进给系统设计数控机床是一种利用数字控制技术来操作机床进行加工的设备。
其中,进给系统是数控机床的核心部件之一,主要负责实现机床轴向运动的精确控制。
本文将从设计原理、系统构成和性能要求三个方面,对数控机床进给系统进行详细阐述。
一、设计原理数控机床进给系统的设计基于三轴坐标系,即X轴、Y轴和Z轴。
当工件需要在不同方向上进行加工时,可以通过对这三个坐标轴的控制,实现工件在平面和立体方向上的运动。
进给系统的基本原理是将需要控制的轴运动距离和速度转换为数字信号,通过数字控制器产生的脉冲信号驱动伺服电机,实现机床的精确控制。
二、系统构成数控机床进给系统由三个主要组成部分构成:数字控制器、伺服驱动器和伺服电机。
数字控制器是整个系统的大脑,负责生成运动指令、计算速度和位置等参数,并将其转换为脉冲信号。
伺服驱动器接收数字控制器发送的脉冲信号,将其转换为电流信号,并通过电机的转矩控制反馈实现机床运动控制。
伺服电机则是进给系统的执行机构,根据伺服驱动器的控制信号,转化为机床轴向的运动。
三、性能要求数控机床进给系统在设计中需要具备多项重要性能要求,以满足机床加工的精度和效率要求。
首先,系统需要具备高速响应能力,能够快速准确地响应指令并实时控制机床轴向运动。
其次,系统需要具备高精度定位能力,能够实现亚微米级的定位精度,以满足精密加工的要求。
此外,系统还需具备较大的负载能力,能够承受较大的加工力矩,以应对各种加工过程中的需求。
同时,在设计中还需要考虑系统的稳定性和可靠性,以确保系统的长期稳定运行,并减少维护和故障排除的成本。
总结起来,数控机床进给系统是数控机床的核心组成部分之一,其设计原理基于三轴坐标系的控制,通过数字控制器、伺服驱动器和伺服电机的协同工作,实现机床轴向运动的精确控制。
进给系统的设计需要满足高速响应、高精度定位、较大负载和稳定可靠等多项性能要求,以保障机床加工的高效精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
给系统),故系统稳定性好。
刀具
无位置反馈,精度相对闭环系统来讲不高,其精度主 要取决于伺服驱动系统和机械传动机构的性能和精度。 一般以功率步进电机作为伺服驱动元件。 这类系统具有结构简单、工作稳定、调试方便、维修 简单、价格低廉等优点,在精度和速度要求不高、驱 动力矩不大的场合得到广泛应用。一般用于经济型数 控机床。
3、最后确定Y轴。可按右手定则定出Y轴正方向。
Z坐标 方位 标准规定:Z坐标∥主轴轴线的进给轴。 若没有主轴(牛头刨床)或者有多个主轴,则选择垂直于工件装夹面
的方向为Z坐标。 若主轴能摆动: 在摆动的范围内只与标准坐标系中的某一坐标平行时,则这个坐标
便是Z坐标; 若在摆动的范围内与多个坐标平行,则取垂直于工件装夹面的方向
③增大工件与刀具之间距离的方向为坐标轴正方向。
各坐标轴及其正方向的确定原则
1、先确定Z轴。以平行于机床主轴的刀具运动坐标 为Z轴,若没有主轴,则规定垂直于工件装夹表面的 坐标轴为Z轴。Z轴正方向是使刀具远离工件的方向。
2、再确定X轴。X轴为水平方向且垂直于Z轴并平行 于工件的装夹面。正方向也是使刀具远离工件的方向
总则:
数控机床上的坐标系是采用右手直角笛卡儿 坐标系。X、Y、Z直线进给坐标系按右手定则 规定,而围绕X、Y、Z轴旋转的圆周进给坐标 轴A、B、C则按右手螺旋定则判定。
机床坐标系判定原则
基本坐标轴X、Y、Z的关系及其正方向用右手 直角定则判定,拇指为X轴,食指为Y轴,中指为 Z轴,围绕X、Y、Z各轴的回转运动及其正方向 +A、+B、+C分别用右手螺旋定则判定,拇指 为X、Y、Z的正向,四指弯曲的方向为对应的A、 B、C的正向。
进给伺服系统
数控机床主体
机床:数控机床的主体,是实现制造加工的执行部件。 组成:由主运动部件、进给运动部件(工作台、拖板以
及相应的传动机构)、支承件(立柱、床身等)以及 特殊装置(刀具自动交换系统 工件自动交换系统)和 辅助装置(如排屑装置等)。
3.数控机床的坐标系
X、Y、Z的正方向 是使工件尺寸增加的方 向,即增大工件和刀具 间距离的方向。通常以 平行于主轴的坐标为Z 轴,X轴平行于工件的 主要装夹面且与Z轴垂 直,Y轴按右手笛卡尔 坐标系确
半闭环数控系统结构简单、调试方便、精度也较高, 因而在现代CNC机床中得到了广泛应用。
(3)全闭环数控系统
全闭环数控系统的位置采样点如图所示,直接对运动部
件的实际位置进行检测。
主轴
刀具
从理论上讲,可以消除整个驱动和传动环节的误 差、间隙和失动量。具有很高的位置控制精度。 由于位置环内的许多机械传动环节的摩擦特性、 刚性和间隙都是非线性的,故很容易造成系统的 不稳定,使闭环系统的设计、安装和调试都相当 困难。 该系统主要用于精度要求很高的镗铣床、超精车 床、超精磨床以及较大型的数控机床等。
由于数控机床各坐标轴既可以是刀具相对于工件运动,也可以 是反之,所以ISO标准和我国的JB3052—1982部颁标准都规定: ①不论机床的具体结构是工件静止、刀具运动,或是工件运动、 刀具静止,在确定坐标系时,一律看作是刀具相对静止的工件运 动。
②机床的直线坐标轴X、Y、Z的判定顺序是:先Z轴,再X轴,最 后按右手定则判定Y轴。
定。三个回转运动A、B、C分别表示回转轴线 平行于X、Y、Z的旋转或摆动运动。其正方向 分别用右手螺旋法则判定。
数控加工是基于数字的加工,刀具与工件的相对位置必须在相 应坐标系下才能确定。数控机床的坐标系统,包括坐标系、坐标 原点和运动方向,对于数控工艺制定、编程及操作,是一个十分 重要的概念。
统一规定数控机床坐标轴及其运动的方向,可使编程方便,并 使编出的程序对同类型机床有通用性。同时也给维修和使用带来 极大的方便。ISO和我国都拟定了命名的标准。
(2)半闭环控制数控机床
半闭环数控系统的位置采样点如图所示,是从驱动装置
(常用伺服电机)或丝杠引出,采样旋转角度进行检测,不
是直接检测运动部件的实际位置。
主轴
刀具
半闭环环路内不包括或只包括少量机械传动环节, 因此可获得稳定的控制性能,其系统的稳定性虽不 如开环系统,但比闭环要好。
由于丝杠的螺距误差和齿轮间隙引起的运动误差难 以消除。因此,其精度较闭环差,较开环好。但可 对这类误差进行补偿,因而仍可获得满意的精度。
Y坐标
利用已确定的X.Z坐标的正方向,用右手定则或右 手螺旋法则,确定Y坐标的正方向。
右手定则:大姆指指向+X,中指指向+Z,则+Y 方向为食指指向。
右手螺旋法则:在Βιβλιοθήκη Z平面,从Z至X,姆指所指 的方向为+y。
数控车床
数控铣床
卧式车床
立式铣床
卧式铣床
为Z坐标。 Z坐标正方向的规定:刀具远离工件的方向。
X坐标 标准规定: 在刀具旋转的机床上(铣床、钻床、镗床等)。 Z轴水平(卧式),则从刀具(主轴)向工件看时,X坐标的正方向指 向右边。 Z轴垂直(立式): 单立柱机床,从刀具向立柱看时,X的正方向指向右边; 双立柱机床(龙门机床),从刀具向左立柱看时,X轴的正方向指向 右边。 在工件旋转的机床上(车床、磨床等),X轴的运动方向是工件的 径向并平行于横向拖板,且刀具离开工件旋转中心的方向是X轴的 正方向。
数控机床进给伺服系统
按数控系统的进给伺服系统有无位置测量装置可分为开环 数控系统和闭环数控系统,在闭环数控系统中根据位置测 量装置安装的位置又可分为全闭环和半闭环两种。
(1)开环控制数控机床 (2)半闭环控制数控机床 (3)闭环控制数控机床
(1)开环控制数控机床 没有位置测量装置,信号流是单向的(数控装置→进