CCD软件使用及调试方法介绍
制片机CCD说明手册

找直线 参数说明
一般只需修改图中的两个红色框的参数:边缘强度:沿搜索线方向的灰度值之差。 CCD用255表示白色,用0表示黑色,灰色就处于0~255之间。 边缘宽度和投影宽度:增加数值能消除干扰点。(绿色的点为正常点,红点为干扰点) 蓝色框可以选择:第一条边缘或者最佳边缘。
•二
口1选裁切位选上面的黄色线;窗口2选裁切位选下黄线。 二、窗口3和4拍的是错贴,窗口3选裁切位选下黄线,窗口4选裁切
位选上黄线。
1
2
3
4
软件参数设置 注:参数调完后记得按保存参数。
• 快速校准 做了标定后的程序,不用每次校准都需要拿标定片来。只需如图下
通过修改像素当量来校准极片宽度的值,修改完后点写入。
• 焊接和统计 注:一-统计计数需要手动清零才能清零,不然会一直累计. 二-焊接报警只与焊接振幅有关,其他参数是用来监控的. 三、数据都是焊接机直接过来的数据,CCD软件没有经过处理
• 标定
步骤:一-菲林片放在料上-二-如下图框编号走-三-根据实际计算菲林 片一个格或者多个格来算距离(一个格10毫米),最后纠正写入
2:在半自动状态,按下下相机定位后进行定位,调 整CCD下定位定长值,使切位与视野下黄线对齐;
3:每次下相机定位完成后,按下上相机定位进行上 定位,调整CCD上定位定长值,使切位与视野下黄 线对齐;
4:调整打标位距离为相机光纤到打标机距离, 出现打标后微调距离到需要位置。
• 贴胶位
一、窗口1和窗口2只能找极耳对贴(T1)。 二、窗口3和4只能找错贴(T2/T3)。
1
大宇CCD精雕机控系统软件操作手册

大宇CCD精雕机控制系统操作手册适用机型:KX600-CCD手册版本:V2.0发布日期:2012.01.01版权声明深圳市大宇精雕数控设备有限公司保留所有权利◆深圳市大宇精雕数控设备有限公司保留在不先通知的情况下,修改本手册中的软件的权力。
◆深圳市大宇精雕数控设备有限公司不承担由于使用本手册或本软件不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
◆深圳市大宇精雕数控设备有限公司具有本软件的专利权、版权和其它知识产权。
未经授权、不得直接或者间接地复制、使用本软件或及其相关部分。
注意:运动中机器有危险!使用者有责任在机器中设计有效的出错处理和安全保护机制。
深圳市大宇精雕数控设备有限公司不对由此造成的附带的或相应产生的损失负责。
目录1.编写目的 (2)2.系统概述 (2)D精雕机控制系统的基本要求 (2)4.软件安装 (2)5.系统功能及分区 (3)5.1系统界面介绍 (3)5.2标题栏 (4)5.3坐标跟踪区 (4)5.4加工状态跟踪区 (4)5.5轨迹跟踪区 (6)5.6报警显示区 (6)5.7控制面板区 (6)6.其他 (14)7.通用G代码一览表 (17)8.CCD加工范例 (18)1.编写目的编写本操作手册的目的是大宇KX6OOCCD系列精雕机控制系统的使用人员能够尽快掌握和熟练使用本软件。
本手册适用于所有使用本系统的操作人员和与大宇CCD精雕机控制系统有关的技术人员。
2.系统概述CCD精雕机控制系统是本着安全,简单,实用的原则,基于高性能运动控制器和标准CNC系统系统。
运动控制器应用高速DSP芯片实现系统的高性能、高速度和高精度。
而CNC系统平台提供对标准NC程序代码的编译,并最终形成运动控制器的控制指令。
CCD精雕机控制系统提供NC、CNC、ANC程序代码自动执行,连续运动及点动运动两种手动运动模式;加工图像的三维预览,可以实时显示当前坐标、进给速度和当前执行程序段号等等系统状态,能够实时修改速度倍率及主轴的速率,并提供断电自动记录段号,加工过程中暂停调整深度等等,使用户轻松方便完成对机床的精确控制。
调试CCD视觉祥细过程
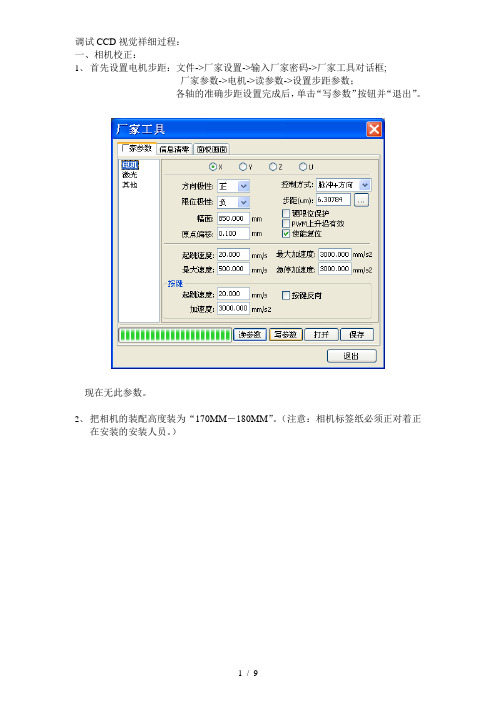
调试CCD视觉祥细过程:一、相机校正:1、首先设置电机步距:文件->厂家设置->输入厂家密码->厂家工具对话框;厂家参数->电机->读参数->设置步距参数;各轴的准确步距设置完成后,单击“写参数”按钮并“退出”。
现在无此参数。
2、把相机的装配高度装为“170MM-180MM”。
(注意:相机标签纸必须正对着正在安装的安装人员。
)3、 调试好相机焦距、亮度。
相机参数设置参看下图,建议不改变相机参数的设置。
若是亮度需要改变,用户可改变“环境光源亮度”或是调节“相机的亮度旋钮”。
用户可以通过点击“曝光”进行自动曝光设置。
相机标签纸相机亮度调节旋钮4、点击软件界面上的“切十字”按钮。
5、把相机移到刚切的十字线位置,让软件上的十字线与切的十字重合(如果软件上的十字线与切的“十字线”存在比较大的夹角,则要调整相机安装),再点击“相距校正”按钮。
(这时软件会自动计算相机与激光头的偏移量。
)6、放一把尺子在相机下,查看相机的拍摄范围,并把在软件视频界面中看到的尺寸“宽:X,高:H”参数填入软件中。
7、打点:把软件中的出光时间设好,(一般设为0.2S),然后点击“打点”按钮。
(打点时,要求打出的点要比较清晰,点尽量要大,可以在离焦模式下打点。
)8、点击“校正”按钮,如果校正成功则继续下一步。
9、再一次点击切“十字”按钮,重复第五步的动作;完成后点击“另存校正”按钮,保存校正文件备用。
二、视觉切割:1、放入要加工的材料,并尽可能摆正。
(本说明中使用的是打印的测试图形,详见附件1)。
2、调节光源的明暗度,使要切割的图片轮廓能尽量被相机显示清晰。
3、移动相机使要切割的图形处于相机的正中心。
4、进入模版编辑界面,并创建模板。
5、创建匹配图形:在模板窗口的特征编辑模式下,用右键框选要加工图形的特征点(本说明中框选的是整个图形,如图所示:)。
如果特征内有许多杂线,可提高“平滑系数”过滤杂线,也可用左键点选或框选要删除的特征,按DEL键删除。
TSL1401线性CCD上位机软件说明书

TSL1401线性CCD上位机软件说明书CCD数据显示使用说明一、PC软件使用CCDView软件由CCDView.exe、ComDataHook.dll组成,请用户使用前确认文件的组成正确。
CCDView主要用于显示用户CCD传感器采集的数据,并以图像的方式显示。
条形码:CCD采集的数据,以灰度的方式表示,每个竖条代表一个数据。
曲线图:横坐标为CCD数据的偏移,纵坐标为灰度值(0~255)。
①、通讯配置上位机使用了115200bps、1位停止位、8位数据、无奇偶校验,用户可以设定串口号,软件默认的为COM1。
②显示设置上位机以灰度表、灰度值显示从下位机传输过来的CCD数据,用户可以选择实时刷新和定时刷新两种方式查看CCD数据。
③、采集数据单击“启动”按钮,开始接收由下位机传输过来的“CCD数据”。
单击“停止”按钮,停止接收由下位机传输过来的“CCD数据”。
④、系统要求WINDOWS Xp SP3、WINDOWS 7系统。
请确保串口连接正常,如果遇到“虚拟串口”无法接收到数据,请联系客服。
如果用户使用的是WINDOWS 7系统,请右击此应用程序,以管理员身份运行。
二、下位机数据格式上位机使用了115200bps、1位停止位、8位数据、无奇偶校验,下位机应该采样同样的配置。
每个数据帧都是以ASCII码发送,传输一帧大约需要18ms的时间,请用户采用最小20ms的发送周期。
意义帧头类型数据长度保留字节CCD数据(128)CRC 帧尾数据内容‘*’"LD" 0 132 00 00 00 00 XXX 00 ‘#’实际帧‘*’"LD" 这些数据的ASCII码"00" ‘#’需要用户填充原始数据,发送函数转化为ASCII码后发送发送函数添加说明发送函数添加表一帧格式实例:PutChar(temp + '0');}}④、PutChar() 为发送串口数据函数,和用户硬件相关。
ccd操作规程

ccd操作规程CCD(Charge-coupled Device)即电荷耦合器件,是一种用于光学图像捕捉的技术。
CCD操作规程主要涉及CCD设备的使用、操作和维护等方面,以下是一个关于CCD操作规程的参考文档,帮助用户正确和高效地使用CCD设备。
一、前期准备工作1. 检查设备运行环境是否符合要求,确保温度、湿度和静电等因素不会对设备性能产生不良影响。
2. 检查CCD设备是否完整,并确保连接线路稳定。
3. 打开设备电源,等待设备初始化完成。
二、CCD设备使用操作步骤1. 打开CCD设备相关的图像处理软件程序,并确保软件程序与CCD设备连接正常。
2. 在软件程序中设置CCD设备的参数,包括图像分辨率、曝光时间、增益等参数。
根据具体需求进行选择和调整。
3. 在设备成像区域放置待拍摄的目标物,调整CCD设备的位置和角度,以获得最佳成像效果。
4. 点击软件程序中的拍摄按钮,开始拍摄图像。
根据需要可进行多次拍摄,以获取多个图像。
5. 检查拍摄的图像是否清晰、准确,并对结果进行评估和记录。
如有需要,可进行后期图像处理。
三、CCD设备维护常规操作1. 定期清洁CCD设备的镜头和镜面,避免灰尘或污渍对成像质量的影响。
2. 正确使用和存储CCD设备,避免碰撞、摔落或受潮等情况。
3. 定期进行CCD设备的检修和维护,包括检查电源线路和数据线路的连接情况,以及检查设备的散热情况等。
4. 在不使用CCD设备时,及时关闭设备并断开电源,以节省能源和延长设备的使用寿命。
四、CCD设备安全操作规范1. 在操作CCD设备时,遵守相关的安全操作规程和标准,确保不会对自身和他人的安全造成风险。
2. 避免长时间连续使用CCD设备,以免产生过热现象,影响设备性能和寿命。
3. 注意设备的使用环境,避免将设备暴露在阳光直射或高温环境中,防止设备受热而引起损坏或故障。
4. 使用合适的设备支架或架子来固定和保护CCD设备,避免设备的不稳定和外力的影响。
CCD相关软件安装及设置

Dalsa相机安装操作一、安装操作系统1.设置通电自启开机以后按delete键或者F2键,进入BIOS界面,点“→”键选择Chipset页面选择第一个PCH-IO Configuration,点击回车,进入如下页面选择最下方“Restore AC Power Loss”,点击回车后选择“Power On”点击回车确定。
设置完成后,按F4保存并关闭,即可重启电脑。
2.重装操作系统1.开机按Delete或F2键进入BIOS,选择BOOT,然后选择最后一项“Hard Drive BBSPriorities”进入后,点击第一个“Boot Option #1”选择“USB DISK”,点击回车,此时“Boot Option #1”变成了”USB DISK注:不同的U盘名称可能不同,大多有USB标识,也有一部分没有USB标识,只需要选中跟当前选项名称不同的即可(如当前Boot Option #1为SATA PM,则选USB DISK即可)。
设置完成后,点击F4保存并关闭1.重启电脑后,系统自动从用U盘启动电脑,选择【03】运行老毛桃Win2003PE增强版(旧电脑)2.登录pe系统后,鼠标左键双击打开桌面上的老毛桃PE装机工具,然后在工具主窗口中点击“浏览”按钮,选择U盘中的操作系统文件(015-ADVANTECH-WIN7-ULTIMATE-32BIT.GHO),点击确定。
如下图所示:3.此时弹出对话框,点击确定4.等待操作系统安装5.安装完成后,电脑会自动重启,重启电脑后,就可以拔出U盘。
6.重启电脑后,将U盘中的CCD、CTS6文件夹复制到D盘下打开WIN7Activation V1.7文件夹,运行WIN7Activation V1.7激活操作系统。
激活完成后,重启电脑,即完成安装步骤。
二、安装驱动软件1.安装加密狗驱动1.选择Sentinel_7.5.0_文件夹2.选择setup,右键管理员模式运行3.点击next4.选择I accept,点击next5.选择complete,点击next6.点击install7.点击Yes8.等待安装完成9.安装完成后点击finish2.安装相机驱动1.点击GenICamSetup_x86_108.exe,选择以管理员模式运行2.点击next安装驱动3.安装完成后,点击finish4.此时弹出安装框,点击next5.点击yes6.点击next进行安装7.安装时会弹出如下对话框,点击始终信任,点击安装8.等待安装完成后,点击finish3.安装Sherlock1.选择Sherlock安装文件,右键管理员模式运行2.点击next进入安装3.点击I agree4.勾选全部选项,点击next。
大宇CCD精雕机控系统软件操作手册
大宇CCD精雕机控制系统操作手册适用机型:KX600-CCD手册版本:V2.0发布日期:2012.01.01版权声明深圳市大宇精雕数控设备有限公司保留所有权利◆深圳市大宇精雕数控设备有限公司保留在不先通知的情况下,修改本手册中的软件的权力。
◆深圳市大宇精雕数控设备有限公司不承担由于使用本手册或本软件不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
◆深圳市大宇精雕数控设备有限公司具有本软件的专利权、版权和其它知识产权。
未经授权、不得直接或者间接地复制、使用本软件或及其相关部分。
注意:运动中机器有危险!使用者有责任在机器中设计有效的出错处理和安全保护机制。
深圳市大宇精雕数控设备有限公司不对由此造成的附带的或相应产生的损失负责。
目录1.编写目的 (2)2.系统概述 (2)D精雕机控制系统的基本要求 (2)4.软件安装 (2)5.系统功能及分区 (3)5.1系统界面介绍 (3)5.2标题栏 (4)5.3坐标跟踪区 (4)5.4加工状态跟踪区 (4)5.5轨迹跟踪区 (6)5.6报警显示区 (6)5.7控制面板区 (6)6.其他 (14)7.通用G代码一览表 (17)8.CCD加工范例 (18)1.编写目的编写本操作手册的目的是大宇KX6OOCCD系列精雕机控制系统的使用人员能够尽快掌握和熟练使用本软件。
本手册适用于所有使用本系统的操作人员和与大宇CCD精雕机控制系统有关的技术人员。
2.系统概述CCD精雕机控制系统是本着安全,简单,实用的原则,基于高性能运动控制器和标准CNC系统系统。
运动控制器应用高速DSP芯片实现系统的高性能、高速度和高精度。
而CNC系统平台提供对标准NC程序代码的编译,并最终形成运动控制器的控制指令。
CCD精雕机控制系统提供NC、CNC、ANC程序代码自动执行,连续运动及点动运动两种手动运动模式;加工图像的三维预览,可以实时显示当前坐标、进给速度和当前执行程序段号等等系统状态,能够实时修改速度倍率及主轴的速率,并提供断电自动记录段号,加工过程中暂停调整深度等等,使用户轻松方便完成对机床的精确控制。
卷绕一体机CCD调试说明书
卷绕一体机CCD调试说明书1、相机IP配置 (2)2、CCD检测方案的加载 (4)3、相机拍照图像效果调节 (5)4、校正检测精度 (6)5、对CCD检测步骤进行调试说明 (8)6、CCD检测参数设置说明 (35)顺之航卷绕一体机CCD调试说明书一、相机IP配置1、IP配置只有按正确的格式给相机配置IP地址,相机才能够进行拍照。
双击桌面的后会弹出IP配置窗口,有三个本地连接分别连接着相机,如果IP地址状态显示为“感叹号”就需要重新配置相机与本地连接的IP地址。
在弹出的窗口中单击本地连接6再点确认之后,进行该本地连接下的相机IP配置,以同样的方法将剩下的几个相机的IP地址全部配置好。
二、CCD检测方案的加载如果是第一次运行软件,则需要加载检测方案和配置文件,在设置开机自动运行检测软件和检测方案后,就可以不用每次都加载检测方案了。
设置步骤如下:打开桌面的检测软件,软件会自动运行之前设置的检测方案,等待画面跳转到三个窗口时,单击最上面的再单击,来到流程图界面,如果没有的话,那就再次点击上面的,如果已经在流程图界面就不用了。
之后单击加载检测方案与配置文件后确认即可,以后每次开机就会自动运行检测了,当你退出一次软件后,下次打开该设置就会自动生效。
三、相机拍照图像效果调节1、相机结构这里介绍相机镜头的结构,调试时需要用到,结构如图所示:螺钉:起到锁紧调节环的作用。
焦距环:调节焦距,也就是调节图像的清晰度。
光圈环:调节光圈的大小,也就是调节图像的亮度。
注意:在CCD硬件位置没有改变时,禁止调节图像效果。
只有CCD发生硬件改动、位置变化时才需要调节图像效果。
图像调节时尽可能增大光圈,减小相机曝光值(双击流程图里面的“采集设置”可以对相机曝光值进行修改)。
如下图:正极上相机图像效果正极下相机图像效果负极上相机图像效果负极下相机图像效果四、校正检测精度在遇到检测出的尺寸数值不准确时,就需要对精度进行校正。
检测精度的意思为:像素长度与实际长度的一个对应比例值,校正检测精度就是测出这个比例是多少。
PCB设备软件CCD校正调试方法
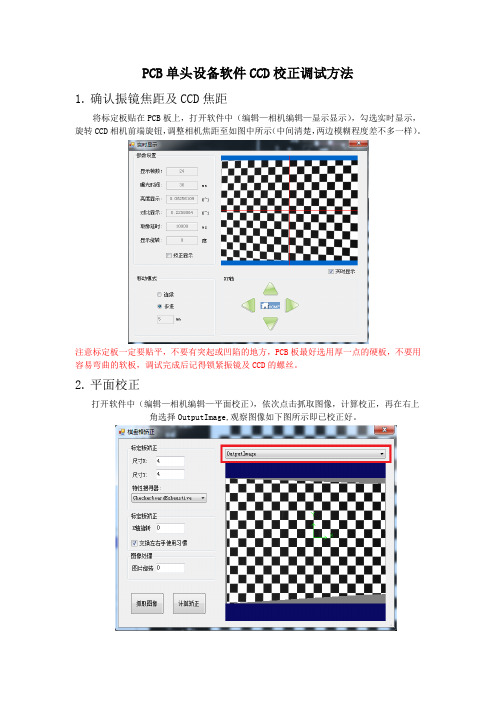
PCB单头设备软件CCD校正调试方法1.确认振镜焦距及CCD焦距将标定板贴在PCB板上,打开软件中(编辑—相机编辑—显示显示),勾选实时显示,旋转CCD相机前端旋钮,调整相机焦距至如图中所示(中间清楚,两边模糊程度差不多一样)。
注意标定板一定要贴平,不要有突起或凹陷的地方,PCB板最好选用厚一点的硬板,不要用容易弯曲的软板,调试完成后记得锁紧振镜及CCD的螺丝。
2.平面校正打开软件中(编辑—相机编辑—平面校正),依次点击抓取图像,计算校正,再在右上角选择OutputImage,观察图像如下图所示即已校正好。
3.拼图校正(1)X轴校正在PCB板上改贴相纸,拍摄全图,做10个打标点(模板为4*4的方框,Y轴坐标一致,X轴坐标每个相差10mm)点击测试运行,再拍摄全图,然后整体拖动10个打标点去对相纸上打过的点,如果发现间距参差不齐,有的点能对上有的点对不上,则调整(编辑—参数设置)中的相机实际尺寸中的X轴参数,改动后重新拍摄全图继续对,使整体拖动后的点在X轴方向都可以对上相纸上的点。
模板做好后最好保存一下,后续校正中还会用到。
(2)Y轴校正Y轴校正方法与X轴一样,只需将10个打标点的坐标设为X轴一样,Y轴每个相差10mm,然后参数设置中更改Y轴参数即可。
(3)旋转校正将10个方块打散放到一张图片中,测试运行—拍摄全图,整体拖动去对相纸上的点如图发现实际打的和模板有一定角度差,则调整(编辑—参数设置)中旋转角度使拖动后的点都可以对上相纸上的点4.相机与振镜中心校正(1)X轴校正加载第三步保存的X轴模板,测试运行后拍摄全图,拍完后不进行任何操作,观察模板与实际所打的是否重合,若不重合:则调整(编辑—参数设置)相机中心与振镜中心相对距离改动后需要重新打标然后拍摄全图,再进行对比,直到模板与实际打标重合。
(2)Y轴校正与X轴校正方法相同(3)确认是否校正好上述工作完成后,与校正旋转类似,将打标点打散分布在同一张图片中,测试运行—拍摄全图,直接观察所打的所有点是否都能基本重合。
TestCCD软件使用说明
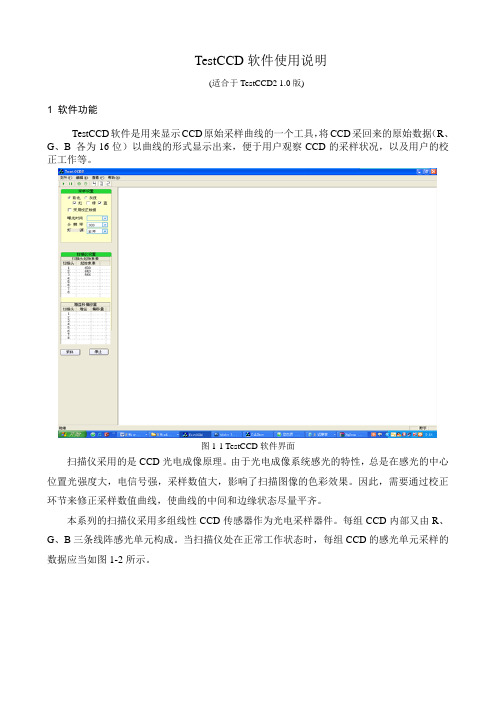
TestCCD软件使用说明(适合于TestCCD2 1.0版)1 软件功能TestCCD软件是用来显示CCD原始采样曲线的一个工具,将CCD采回来的原始数据(R、G、B 各为16位)以曲线的形式显示出来,便于用户观察CCD的采样状况,以及用户的校正工作等。
图1-1 TestCCD软件界面扫描仪采用的是CCD光电成像原理。
由于光电成像系统感光的特性,总是在感光的中心位置光强度大,电信号强,采样数值大,影响了扫描图像的色彩效果。
因此,需要通过校正环节来修正采样数值曲线,使曲线的中间和边缘状态尽量平齐。
本系列的扫描仪采用多组线性CCD传感器作为光电采样器件。
每组CCD内部又由R、G、B三条线阵感光单元构成。
当扫描仪处在正常工作状态时,每组CCD的感光单元采样的数据应当如图1-2所示。
图1-2 CCD采样的感光数据曲线(以三组CCD的机型为例)理想的感光数据应该是比较光滑的曲线,中部较高处的数值,一般在30000左右,最高不超过45000,最低不低于20000。
可以通过运行TestCCD 工具软件来查看感光数据的曲线状态。
如果CCD感光数据不对,则可以通过改变ExposureTime.dat文件中曝光时间的方法来修正。
当感光曲线的数值高于45000时,应当减小曝光时间使CCD曲线值降低;反之,则应当增大曝光时间使CCD曲线值升高,直至CCD曲线值处于一个理想的范围。
2 软件用法TestCCD工具软件用法说明。
.2.1 观察扫描仪的CCD感光状态首先将一张白色的校正条放置于扫描区,软件的原理是连续采样一条白色目标物,每隔一段时间刷新显示一次。
软件开始运行的时候扫描头会前进一小段距离,从扫描零位移动到白色校正条位置,所以请确保白色校正条放置在扫描头感光区域的正上方,能被扫描头扫到。
白色的校正条可以采用随设备附带的黑白校正条中间的白色区域。
图2-2 TestCCD软件界面由于大幅面扫描仪采用多组光电传感器,因此对其进行测试的时候,请根据自己设备的具体型号进行选择。
邦纳CCD编程说明书

邦纳视觉传感器(CCD)编程说明初爱东2015-07-18目录一、操作软件的安装......................................... (3)二、更改电脑的IP地址 (4)三、运行操作软件............................................................ (6)四、操作软件编程 (7)邦纳视觉软件编程流程:..................................................................................................... .. 8 流程一:进入系统窗口进行设置 (8)流程二:进入设置窗口获取参考图像 (15)流程三:进入工具窗口进行视觉分析,并输出 (18)流程四:进入运行窗口,运行检测程序 (35)邦纳视觉软件操作说明一、操作软件的安装将装有PC 软件的光盘放进电脑光驱,并使用自动安装功能即可自动完成安装。
安装结束后电脑桌面会出现邦纳视觉软件的图标,如下图:视觉软件图标PresencePLUS二、更改电脑的IP地址硬件连接后,需要设置电脑的IP 地址,与视觉相机的地址在同一个网段内,电脑才能与视觉相机进行通信,进行编制视觉检测程序。
邦纳的视觉传感器出厂设置IP 为192.168.0.1,因此电脑IP可以设置为192.168.0.X(1<X<255)。
更改电脑IP设置如下图所示:右键点击网上邻居,选择属性右键点击本地连接,选择属性上图:设置完成之后,点击确定即可进入下一步,运行操作软件选择internet 协 议三、运行操作软件PresencePLUS双击图标,运行程序上图:视觉传感器完成硬件连接后,通电,双击桌面上的PresencePLUS图标,运行操作软件可选择以太网方式连接或者串口方式连接上图:软件运行,弹出对话框,显示所有连接在网络上的视觉相机,选择好相机,点确定连接通信,即可与选择的相机进行连接通信四、操作软件编程连接到视觉相机后,自动进入设置窗口,界面顶部有7个主要窗口按钮,分别是设置、工具、示教、运行、系统、保存、帮助按钮.七个主要按钮菜单:1,设置窗口按钮:点击进入设置窗口界面,对图像进行曝光时间调节和增益调节,以获得对比良好,清晰的参考图片.2,工具窗口按钮:点击进入工具窗口界面,选择最适合的视觉工具,对参考图片内需要检测的区域进行视觉分析,判断并输出结果.3,示教窗口按钮:依据当前被测物示教,自动配置测试工具里的设置参数4,运行窗口按钮:点击,进入运行窗口界面,运行检测.5,系统窗口按钮:点击进入系统设置窗口,进行系统设置,设置I/O,通信口参数,操作软件界面语言等.6,保存窗口按钮:点击保存当前编辑的程序7,帮助窗口按钮:点击打开帮助文档基本视觉编程思路:1,根据实际需要,对视觉传感器进行系统参数设定。
【CCD图像检测】3:图像的调试方法
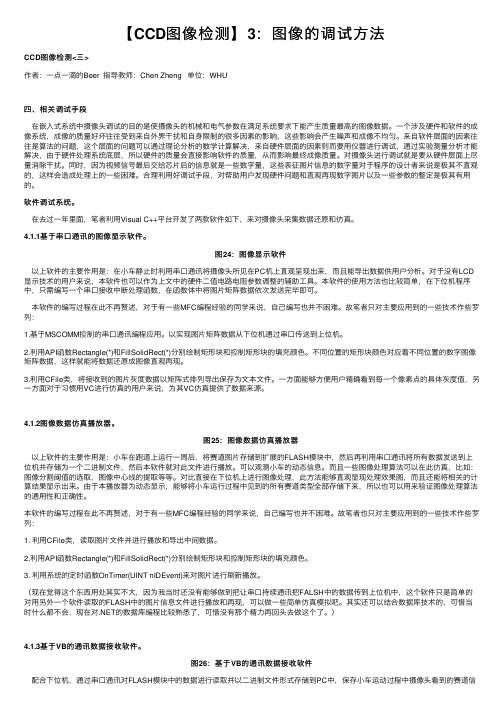
【CCD图像检测】3:图像的调试⽅法CCD图像检测<三>作者:⼀点⼀滴的Beer 指导教师:Chen Zheng 单位:WHU四、相关调试⼿段在嵌⼊式系统中摄像头调试的⽬的是使摄像头的机械和电⽓参数在满⾜系统要求下能产⽣质量最⾼的图像数据。
⼀个涉及硬件和软件的成像系统,成像的质量好坏往往受到来⾃外界⼲扰和⾃⾝限制的很多因素的影响,这些影响会产⽣噪声和成像不均匀。
来⾃软件层⾯的因素往往是算法的问题,这个层⾯的问题可以通过理论分析的数学计算解决,来⾃硬件层⾯的因素则⽽要⽤仪器进⾏调试,通过实验测量分析才能解决,由于硬件处理系统底层,所以硬件的质量会直接影响软件的质量,从⽽影响最终成像质量。
对摄像头进⾏调试就是要从硬件层⾯上尽量消除⼲扰。
同时,因为视频信号最后交给芯⽚后的信息就是⼀些数字量,这些表征图⽚信息的数字量对于程序的设计者来说是极其不直观的,这样会造成处理上的⼀些困难。
合理利⽤好调试⼿段,对帮助⽤户发现硬件问题和直观再现数字图⽚以及⼀些参数的整定是极其有⽤的。
软件调试系统。
在去过⼀年⾥⾯,笔者利⽤Visual C++平台开发了两款软件如下,来对摄像头采集数据还原和仿真。
4.1.1基于串⼝通讯的图像显⽰软件。
图24:图像显⽰软件以上软件的主要作⽤是:在⼩车静⽌时利⽤串⼝通讯将摄像头所见在PC机上直观呈现出来,⽽且能导出数据供⽤户分析。
对于没有LCD 显⽰技术的⽤户来说,本软件也可以作为上⽂中的硬件⼆值电路电阻参数调整的辅助⼯具。
本软件的使⽤⽅法也⽐较简单,在下位机程序中,只需编写⼀个串⼝接收中断处理函数,在函数体中将图⽚矩阵数据依次发送完毕即可。
本软件的编写过程在此不再赘述,对于有⼀些MFC编程经验的同学来说,⾃⼰编写也并不困难。
故笔者只对主要应⽤到的⼀些技术作些罗列:1.基于MSCOMM控制的串⼝通讯编程应⽤。
以实现图⽚矩阵数据从下位机通过串⼝传送到上位机。
2.利⽤API函数Rectangle(*)和FillSolidRect(*)分别绘制矩形块和控制矩形块的填充颜⾊。
调试CCD视觉祥细过程

调试CCD视觉祥细过程:一、相机校正:1、先调机器设备的机器参数“电机步距”,接着把用户参数里的回位位置改为“不回位”。
2、把相机的装配高度装为“170MM-180MM”。
(注意:相机上的标签纸要正对着正在安装的安装人员。
)3、调试好相机的焦距、亮度。
4、点击“切十字”按钮。
5、把相机移到刚切的十字线位置,让软件上的十字线与切的十字重合(如果软件上的十字线与切的“十字线”存在比较大的夹角,则要调整相机安装),再点击“相距校正”按钮。
(这时软件会自动计算相机与激光头的偏移量。
)6、放一把尺子在相机下,查看相机的拍摄范围,并把在软件视频界面中看到的尺寸“宽:X,高:H”参数填入软件中。
7、打点:把软件中的出光时间设好,(一般设为0.2S),然后点击“打点”按钮。
(打点时,要求打出的点要比较清晰,点尽量要大,可以在离焦模式下打点。
)8、点击“校正”按钮,如果校正成功则继续下一步。
9、再一次点击切“十字”按钮,重复第五步的动作;完成后点击“另存校正”按钮,保存校正文件备用。
二、视觉切割:1、放入要加工的材料,并尽可能摆正。
(本说明中使用的是打印的测试图形,详见附件1)。
2、调节光源的明暗度,使要切割的图片轮廓能尽量被相机显示清晰。
3、移动相机使要切割的图形处于相机的正中心。
4、进入模版编辑界面,并创建模板。
5、创建匹配图形:在模板窗口的特征编辑模式下,用右键框选要加工图形的特征点(本说明中框选的是整个图形,如图所示:)。
如果特征内有许多杂线,可提高“平滑系数”过滤杂线,也可用左键点选或框选要删除的特征,按DEL键删除。
6、创建切割图形:切换到切割编辑模式,绘制或导入要切割的图形,并与模板中的图象对齐。
7、匹配测试:点击“匹配测试”按钮,查看视频窗口中显示的结果,如果显示的结果符合所要求的数据则表示模板正确,如果显示的结果出现了不同的数据则表示匹配不成功,此时则要求调整“相似度”和“匹配角度”的参数,使之达到所要求出现的结果。
CCD5000安装调试说明书V1.1.2

模板大小 = (最大物料宽度+最小物料宽度) / 2
双 CCD 时:
模板大小 = 单个 CCD 测量范围 / 2
注意:尽量选择测量物料或与被测物料厚度相仿的材料做模板,制作时不要有
毛边。
2、计算模板放置位置
将制作的模板放在镜头下方大概中心位置,看液晶屏上测量的像素点数(第 2
个数据),计算公式为:
物料放置起始位置(屏上第 4 个数据) = (5300 – 测量像素点数) / 2;
4、Z 方向调节
系统上电,将位置 4 的螺钉松开,
镜头保护罩旋下,看液晶屏上的显示
线,旋转镜头光圈调节环将光圈调到屏
图 4.1
图 4.2
幕上显示曲线,调节位置 3 螺母使显示
屏上显示一条弧线或最左端和最右端点的高度一致(如图 4.1 所示),然后再将光
圈调大一级使液晶上显示一条直线(如图 4.2 所示)。
换
小(0.1,1,10,100)
屏幕点亮
设置参数
退出键
屏幕点亮
退出设置模式
2、运行界面参数介绍 图 3.1 为运行界面,其中:57.7 为测量宽度,单位 mm;
11 为焦距;711 为实际采集的像素点数; 3006 为被测物料的 起始点位置(从左到右是 0~5300)。
图 3.1
3、参数设置介绍 1、1.Revise :CCD 校正
4
CCD5000 安装调试说明 V1.1.2
—上海凯多机电设备有限公司
3、校正 计算得到物料起始位置(屏上第 4 个数据)后移动模板使物料起始位置(第 4 个
数据)与计算结果一致,按 键进入校正界面;通过操作
键,
使模板宽度值(校正界面的第 1 个数据)等于模板实际宽度;设置好后按下
CCD视觉检测软件操作说明书(In-Vision 6.2版本)

工业检测、CCD检测In-Vision6.2视觉检测软件操作说明书功能:1、产品的二维、三维尺寸测量;2、颜色的识别、线材等安装次序的检测;3、字符、条码、二维码的识别;4、金属、塑胶、印刷品、药品、玻璃等表面缺陷检测;5、配合自动化非标设备检测、定位,机器人定位;6、自带影像二次元测量软件。
CCD检测软件In-Vision6.2操作说明目录1软件安装 (1)1.1安装In-Vision6.2软件 (1)1.2安装相机驱动 (2)1.3安装加密狗驱动 (2)1.4安装IO卡驱动 (2)1.5安装串口组件 (3)1.6安装VS2008最小库 (4)1.7安装IO信号管理工具 (4)2软件使用 (5)2.1软件启动 (5)2.2连接相机 (8)2.3界面介绍 (10)2.3.1菜单 (10)2.3.2工具栏 (13)2.3.3任务导航栏 (13)2.3.4相机视图显示栏 (15)2.3.5检测设置和规则设置栏 (16)2.3.6规则设置预览和检测结果预览 (17)2.3.7状态栏 (17)2.3.8鼠标操作 (18)2.4功能介绍及操作流程 (18)2.4.1绘制检测区域 (18)2.4.2设置检测区域定位位置 (20)2.4.3辅助相机聚焦 (22)2.4.4检测规则设置 (22)2.4.5动态跟踪 (40)2.2.6相机标定 (41)2.2.7自定义IO (43)2.2.8结果输出 (43)2.2.9颜色识别 (44)2.2.10目标定位 (45)2.2.11表面缺陷检测 (46)2.2.12影像二次元 (47)2.4部分案例 (48)3关于我们 (54)1软件安装 (55)1.1安装软件 (55)1.2安装相机驱动 (55)1.3安装加密狗驱动 (55)2软件使用 (56)2.1界面介绍 (56)2.1.1菜单 (56)2.1.2工具栏 (58)2.1.3状态栏 (58)2.2功能介绍 (58)2.2.1载入数据 (58)2.2.2相机标定 (59)2.2.3直线距离测量 (59)2.2.4圆测量 (61)2.2.5角度测量 (62)2.2.6修改测量 (63)2.2.7自动捕捉 (63)2.2.8保存测量 (63)1软件安装1.1安装In-Vision6.2软件右键查看属性双击图标进行安装界面默认下一步安装完In-Vision软件1.2安装相机驱动()然后下一步自动安装相机驱动:1.3安装加密狗驱动然后下一步自动安装加密狗驱动:1.4安装IO卡驱动然后下一步自动安装IO卡驱动:1.5安装串口组件1.6安装VS2008最小库1.7安装IO信号管理工具注:整个安装过程一次完成,自动安装所有驱动程序。
CCD系统操作说明

CCD系统操作说明1.系统概述2.系统配置-CCD模块:用于捕获图像。
-控制器:用于控制CCD模块的工作模式和参数设置。
-计算机:用于图像处理和存储。
3.系统操作流程3.1CCD模块的连接将CCD模块与控制器正确连接。
通常,CCD模块和控制器之间使用USB或其他可用接口进行连接。
3.2启动系统打开计算机,确保系统已经准备就绪。
3.3控制器设置启动控制器软件,并进行相关设置。
-选择CCD模块:在控制器软件中选择连接的CCD模块。
-设置工作模式:根据所需的图像获取方式选择工作模式,如连续捕获、触发捕获等。
-设置曝光时间:根据实际需求设置曝光时间,以确保获取到清晰的图像。
-设置图像分辨率:根据需要选择图像的分辨率。
-其他参数设置:根据实际情况设置其他参数,如增益、对比度等。
3.4图像捕获点击控制器软件中的“开始捕获”按钮,CCD模块将开始捕获图像。
根据工作模式的设置,图像可以连续捕获或在接收到触发信号后进行捕获。
3.5图像处理使用图像处理软件打开捕获到的图像文件。
根据需求进行图像处理,如调整亮度、对比度,滤波,边缘检测等。
3.6图像存储完成图像处理后,将图像保存到计算机中,以备后续使用。
可以选择不同的图像格式(如JPEG、PNG等)进行保存。
4.注意事项4.1使用稳定的电源供应确保CCD模块和控制器稳定地供电,以避免系统异常或图像捕获失败的情况。
4.2避免干扰源保持CCD模块和控制器远离电磁辐射源,以避免干扰对图像质量的影响。
4.3定期校准定期对CCD模块进行校准,以确保图像质量的稳定性。
4.4操作注意在操作过程中,注意避免碰撞CCD模块和控制器,以及避免直接触摸CCD模块的感光表面。
以上是CCD系统的基本操作流程和注意事项。
根据实际需求和系统配置,可能存在一些差异和特殊要求。
建议在使用系统前阅读相关用户手册,了解具体的操作步骤和功能。
CCD操作说明
d.依次去追加工具,全部追加完成并可进入到第四步
10.第四步输出分配OUT2修改成工具1,OUT4修改成工具3,这是根据治具 接线来设置的,正常情况按照这样设置就可以,最后点击完成并可使用
程序路径
CCD安装程序和USB2.0/3.0外接网卡程序都在 \\wmis02\暫存區\EEEE周輝\CCD 中,请自行 安装
a2.工具01追加完成
a3.窗口使用矩形,矩形面积修改
a4.将矩形面积缩小到线材宽度大小,并移动矩形覆盖线材上面
b1.设定抽取颜色
b2.抽取颜色时,鼠标移动到所要比对的线材上面左击,抽取完成后就可 以下一步
c.相似度调节至70%左右就可以保存,太高会导致识别度达不到,太低有 可能导致误判
CCD操作說明
Justin
20170228
1.双击打开此图标
,出现以下画面,点击直接连接
2.首先选择网络IP,后点击开始连接
3.机型新设定CCD图像
4.程序设定
5选择未注册过的图像画面,编辑图像名称(机型名称)
6.图像名称编辑完成后开始传感器设定
7.分别对条件,亮度,焦距的设定 a.条件的设定>内部触发>间距时间500ms即可
b.高度调节>自
d.扩展功能>全部范围>进入第二步设置
8.注册图像 a.选择当前图像设置为主控图像,如果历史有图片也可以选择历史图片
b.注册图像
c.进入第三步设置
9.第三步工具设定 a1.首先得追加工具,判断工具正常使用颜色分辨,轮廓的使用后期可 以自己慢慢摸索
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
ModeFlg = 1; /* Set state of device to the measure mode */
OutFlg = 0; /* Output values aren't available */
*ImageData++ = (byte)(temp_int>>8);
PORTA=0x00; /* CLK = 0 */
}
SamplingDelay();
SamplingDelay();
PORTA=0x01; /* CLK = 1 */
SamplingDelay();
SamplingDelay();
PORTA=0x00; /* CLK = 0 */
}
void ImageCapture(unsigned char * ImageData) {
unsigned char i;
}
void AO_MainMeasure(void)
{
if (ATD0STAT0_SCF) { /* Is a sequence completed? */
OutFlg = 1; /* Measured values are available */
PORTA=0x00; /* CLK = 0 */
for(i=0; i<127; i++) {
SamplingDelay();
SamplingDelay();
PORTA=0x01; /* CLK = 1 */
Cpu_Delay1us();
}
//Sampling Pixel 1
error = AO_Measure(TRUE);
error = AO_GetValue16(&temp_int);
*ImageData++ = (byte)(temp_int>>8);
}
*Values = ((word)(ATD0DR0L)) << 8U; /* Save measured values to the output buffer */
return 1; /* OK */
}
#pragma CODE_SEG __NEAR_SEG NON_BANKED
SamplingDelay();
SamplingDelay();
PORTA=0x00; /* CLK = 0 */
}
SCI0CR2 |= ( 0x08 | 0x04 | 0x20);
AD
unsigned char OutFlg; /* Measurement finish flag */
/* ATD0CTL5: ??=0,SC=0,SCAN=0,MULT=0,CD=0,CC=0,CB=0,CA=0 */
ATD0CTL5 = 0x00U; /* Start conversions */
if (1) { /* Is WaitForResult TRUE? */
PORTA=0x02; /* SI = 1 */
SamplingDelay();
PORTA=0x03; /* CLK = 1 */
SamplingDelay();
PORTA=0x01; /* SI = 0 */
1无法发现串口,用管理员身份运行上位机软件
2默认比特率111520
3电压后面跟的是ad值,是8位ad
4前瞻距离1.5左右
52中镜头对比
红色地
vcc
AD0
PA0 PA1
void StartIntegration(void) {
unsigned char i;
AO_MainMeasure();
}
if (!OutFlg) { /* Is measured value(s) available? */
return 0; /* If no then error */
}
}
return 1; /* OK */
}
byte AO_GetValue16(word *Values)
{
if (ModeFlg != 0) { /* Is the device in any measure mode? */
/* ATD0CTL1: ETRIGSEL=0,SRES1=0,SRES0=0,SMP_DIS=0,ETRIGCH3=1,ETRIGCH2=1,ETRIGCH1=1,ETRIGCH0=1 */
ATD0CTL1 = 0x0FU; /* Set resolution and discharge */
/* ATD0CTL2: ??=0,AFFC=1,ICLKSTP=0,ETRIGLE=0,ETRIGP=0,ETRIGE=0,ASCIE=0,ACMPIE=0 */
ATD0CTL2 = 0x40U; /* Set ATD control register 2 */
SamplingDelay();
PORTA=0x00; /* CLK = 0 */
for(i=0; i<127; i++) {
SamplingDelay();
SamplingDelay();
PORTA=0x01; /* CLK = 1 */
SamplingDelay();
SamplingDelay();
//Sampling Pixel 2~128
error = AO_Measure(TRUE);
error = AO_GetValue16(&temp_int);
SamplingDelay();
PORTA=0x01; /* SI = 0 */
SamplingDelay();
//Delay 10us for sample the first pixel
for(i = 0; i < 10; i++) {
/* ATD0CTL4: SMP2=0,SMP1=0,SMP0=0,PRS4=0,PRS3=0,PRS2=0,PRS1=0,PRS0=1 */
ATD0CTL4 = 0x01U; /* Set sample time and prescaler */
/* ATD0CTL3: DJM=1,S8C=0,S4C=0,S2C=0,S1C=1,FIFO=0,FRZ1=0,FRZ0=0 */
unsigned char error;
unsigned int temp_int;
PORTA=0x02; /* SI = 1 */
SamplingDelay();
PORTA=0x03; /* CLK = 1 */
}
#pragma CODE_SEG TI_CODE
ModeFlg = 0; /* Set the device to the stop mode */
}
}
byte AO_Measure(bool WaitForResult)
{
if (ModeFlg !=0) { /* Is the device in different mode than "stop"? */
while (ModeFlg == 0) { /* Calling MainMeasure while IDLE state occured */
AO_MainMeasure(); /* A/D converter handler */
ATD0CTL3 = 0x88U; /* Set ATD control register 3 */
/* ATD0CTL0: ??=0,??=0,??=0,??=0,WRAP3=1,WRAP2=1,WRAP1=1,WRAP0=1 */
ATD0CTL0 = 0x0FU; /* Set wrap around */
SamplingDelay();
SamplingDelay();
PORTA=0x00; /* CLK = 0 */
}
SamplingDelay();
SamplingDelay();
PORTA=0x01; /* CLK = 1 */
unsigned ModeFlg;
void AO_Init(void)
{
OutFlg = 0; /* No measured value */
ModeFlg = 0; /* Device isn't running */
void interrupt 66 PIT0(void)
{
PITTF = 0x01U; /* Reset interrupt request flag */
TI_OnInterrupt(); /* Invoke user event */