蒙德驱动器主轴mf)调试步骤
Siemens 802DSL系统伺服全闭环及主轴编码器调试步骤
在PC机上使用CTRL+E,
进入专家模式,
• 然后将P140参数设置 为3。如下图:
再次选择SERVO_03 X轴的[Configuration]驱动配
置。
出现如图所示画面。
在ENCODER 3处选择EDS2:如下图所示:
• 选择 进入配 置画面,连续按 直至出现图所示画面:
• 选择 • 选择 • 选择
• 进入轴机床数据的SP 主轴数据,设置如下 参数: • 30100=0(模拟主轴) • 30110=3 • 30120=1 • 30130=1
• • • •
30200=1 30220=1 30230=1 30240=1
• 31020=5000 • 31040=1
• 32250=100 • 32260=400(工作台 最高转速)。 • 设置完后,断开再接 通机床电源。
打开后,出现如图所示画面。
• 在画面左上角选择如 图所示图标。
根据下图所示分别设置相应数据。设置后,选择 [OK]。
• 软件左侧将显示如上 图所示菜单树。
• 在软件上选择 进行 同系统的连接。
连接后,显示上图所示画面,选择[Load to PG]将系 统内数据下载至PC机中。
• 下载后,软件左侧将 出现如图所示图示:
(输入数据)
在出现的画面中,按下图选择参数。 选择后,按[OK]结束。
然后再次按压CTRL+E进入专家画面:设置如下参 数: 设置P922=999
设置P480[0]=%0 设置P480[2]=R2050[5]
设置P2051[5]=r481[2]
P2061[6]=R482[2] P2061[8]=R483[2]
选择[直接连接]
• 建立后将显示如图所 示建立画面。 802DSL系统的IP地址 和子网络表征码无法 更改,为系统默认设 置。
蒙德MF变频器快速设定文件
TAPPING CENTER主轴包套调试手册By : 新代数控Date : 2012/02/6Ver : 1.6版本更新记录目录一、摘要 (4)二、硬件规格确认 (5)1、相关硬件 (5)2、主轴相关需要用到的外部I/O点 (5)三、连接 (6)1、驱动、电机与新代的连接 (6)2、布线注意要点 (7)四、系统主轴相关参数设定 (8)五、蒙德变频器调试步骤: (9)1、准备参数 (9)2、请按照以下建议值设定 (9)3、自学习调试 (10)4、应用参数调整 (11)5、辅助参数调整 (12)6、主轴定位调试 (13)六、常见问题排查(Q&A) (14)七、附件 (15)1、驱动器常见警报 (15)2、状态监视参数 (16)一、摘要本手册是TAPPING CENTER针对以下驱动器和马达规格的调试手册,内容包括:硬件规格确认、硬件连接、系统主轴相关参数设定、变频器调试步骤以及常见问题排查五个部分,制定此手册的目的在于让新代和机械厂技术人员在使用手工调试主轴包套时使用,也可以作为熟悉新代主轴包套的学习资料。
二、硬件规格确认1、相关硬件表一:2、主轴相关需要用到的外部I/O点表三:三、连接1、驱动、电机与新代的连接下表提供回生电阻的选配资料供参考。
表四:注意:功率的选用要考虑主轴的减速时间和惯量p∝T*ω,在主轴做高减速刚攻时会释放大量的能量必须使用大功率电阻方可承但,如果机台用长时间连续刚攻的需要,制动电阻上还要加装冷却风扇,不然止动电租可能会因过热而烧坏。
2、布线注意要点a、电盘配电时请将编码器信号线和动力线分开走线,尽量让编码器线与动力线保持距离,以避开干扰源。
b、建议在编码器线上增加磁环,增强抗干扰能力。
c、做到编码器屏蔽线双端接地。
四、系统主轴相关参数设定说明:参数26设定4,表示此主轴的运转指令,由控制器轴卡的P4接口送出,因此驱动器的指令连接线须连接P4口。
参数66设定此主轴伺服规划之每转分辨率,此参数需与参数1651设定相同。
蒙德驱动器主轴mf)调试步骤

蒙德驱动器主轴(M F )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二. 参数设置以及自学习:(空载或者轻载的情况下)
1. 输入密码OP8=0000
2.初始化OP4=0,按两下
;OP4=100, 按两下。
(出厂已经设置好)
P2.加减速时间
P3.ASR特性
在电机不振动的情况下尽量调大P3.01-P3,.03,调小P3.04-P3.06,以提高刚性和响应性
P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视U2.06有没有的脉冲值0~360.0变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4. 自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6键,
键,电机将以设定的频率反向运行,试运
行时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小则为正常。
注:如果试运行过程中电机振动,请将E5.01、E5.02、E5.03的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
5.5KW及以下(小机壳):
7.5KW及以上(大机壳):。
蒙德(MODROL)IMS-GF变频器说明书

M O D R O L E L E C T R I C C O ., L T D .IMS -G F 系列使用手册交流伺服驱动器 400V 级1.5KW ~ 55KW产 品 运 转 前 请 认 真 阅 读 说 明 书 , 并 保 存 好 , 以 备 今 后 查 阅 。
VERSION: VS501目录第1章概要1.2 性能指标 (6)第2章变频器的相关说明第3章接线第4章操作器的使用第5章参数一览表第6章参数的说明第7章保护功能及故障显示7.1故障检出 (59)11.2 性能指标 (6)1.1 功能MODROL公司IMS-GF系列通用型驱动器采用智能功率模块IPM模块,具有集驱动、保护、功率交换于一体的优点,大大提高整机的可靠性;采用优化的PWM生成技术,输出谐波小;丰富的保护功能,使驱动器及周边设备的使用寿命更长!■具有V/F曲线控制、无传感矢量控制、电流矢量控制、磁通矢量控制四种电机控制模式,具有低速高转矩、低噪音等优点,适合不同的应用场合■可驱动交流异步电机、交流永磁同步电机■强大的控制功能转矩提升、全领域直流制动、速度搜索、PID控制、输出电压自动调整(AVR)等■接口丰富可切换的共发射极/共集电极端子输入模式标准的通信接口RS-422/485脉冲输入/输出■频率指令的种类●操作器直接设定●操作器UP/DOWN设定●外部端子多段速控制●外部端子UP/DOWN设定●模拟量输入●脉冲输入■特殊功能应用模式●主轴定位●刚性攻丝●PID控制卷绕控制■客户化功能追加具有系统的客户化功能追加体系,轻松实现控制驱动一体化。
22.1铭牌说明在驱动器侧面贴有铭牌,记载了驱动器的型号,规格,编号等,请用户确认与订购的产品是否一样。
■ 铭牌示例三相AC 400V 11KW 铭牌示例:图2.1 铭牌■ 型号说明在铭牌上的驱动器型号(MODEL )一栏里,用数字和字母表示了驱动器的系列号、电压等级、最大适用电机容量以及改版记号。
蒙德驱动器载重调试
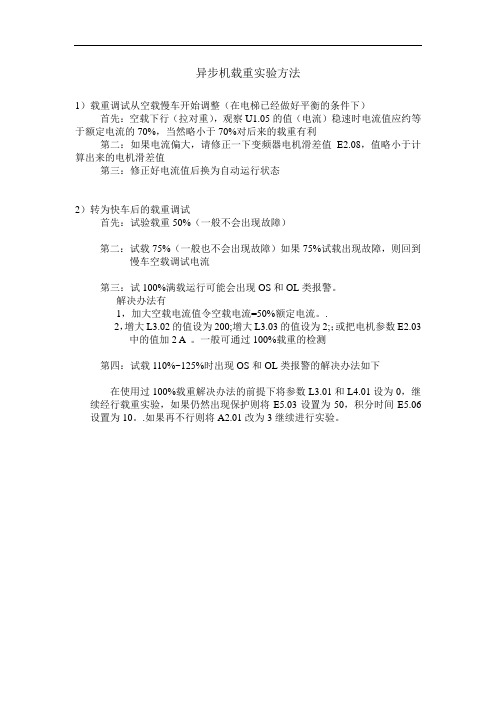
异步机载重实验方法
1)载重调试从空载慢车开始调整(在电梯已经做好平衡的条件下)首先:空载下行(拉对重),观察U1.05的值(电流)稳速时电流值应约等于额定电流的70%,当然略小于70%对后来的载重有利
第二:如果电流偏大,请修正一下变频器电机滑差值E2.08,值略小于计算出来的电机滑差值
第三:修正好电流值后换为自动运行状态
2)转为快车后的载重调试
首先:试验载重50%(一般不会出现故障)
第二:试载75%(一般也不会出现故障)如果75%试载出现故障,则回到慢车空载调试电流
第三:试100%满载运行可能会出现OS和OL类报警。
解决办法有
1,加大空载电流值令空载电流=50%额定电流。
.
2,增大L3.02的值设为200;增大L3.03的值设为2;;或把电机参数E2.03中的值加2 A 。
一般可通过100%载重的检测
第四:试载110%~125%时出现OS和OL类报警的解决办法如下
在使用过100%载重解决办法的前提下将参数L3.01和L4.01设为0,继续经行载重实验,如果仍然出现保护则将E5.03设置为50,积分时间E5.06设置为10。
.如果再不行则将A2.01改为3继续进行实验。
蒙德伺服驱动 按功能设定参数
最大输出频率电压 (E1.02.)
第六章 按功能设定参数
中间输出频率电压 (E1.04.)
最低输出频率电压 (E1.06.)
最低输出频率(E1.05.)
中间输出频率(E1.03.)
图 2.1 V/f 曲线示意图
基频(E1.01.)
频率/Hz
设定注意事项
设定任意 V/F 曲线时,请注意以下事项。
300.00
1~6000 1450RPM ○ ◎ ◎ ◎ ◎ ◎ ◎
0.1~500.0 10.5A* ○ ◎ ◎ ◎ ◎ ◎ ◎
0.10~20.00 1.50Hz* ○ ◎ ◎ ◎ ◎ ×
×
0.01~5.000 0.922* ○ ○ ○ ○
○
×
×
E2.10. 电机漏抗%
由电机漏抗而引起的电压
降,以电机额定电压的%来 0.0~60.0 18.0% ○ ○ ○ ○
设定电机线间电阻
若自学习失败,不能得到正确的电机线间电阻值,请向电机制造厂家询问。请按测试报告的线 间电阻值,由以下计算公式计算、设定。 E 种绝缘:测试报告的 75℃时的线间电阻值(Ω)×0.92 B 种绝缘:测试报告的 75℃时的线间电阻值(Ω)×0.92 F 种绝缘:测试报告的 115℃时的线间电阻值(Ω)×0.87
○
×
×
设定
*1、出厂设定值因驱动器的功率而不同(表中所示为 400V 级 7.5kW 驱动器的设定值)。
2- 1
第六章 按功能设定参数来自使用操作手册设定电机参数电机参数的设定方法,如下所述。请参照电机测试报告设定参数。设定电机额定功率、极数、 额定电流、额定电压、额定频率与额定转速,请将电机铭牌上记载的额定值设定在相应的参数 中。
蒙德电梯专用变频器GL3调试说明

蒙德电梯专用变频器GL3调试说明GL3调试说明一、简介MODROL GL3电梯专用型变频器是全矢量控制型的变频器,具有如下技术特点: , 可驱动异步及永磁同步主机, 可配套多种编码器, 全系列内置制动单元, 可使用多段速或模拟量的速度控制方式, 开关或模拟信号输入的称重预补偿功能, 永磁同步无齿主机开闸锁定功能(须配套正余弦编码器) , 掉电过渡功能可配套的编码器类型, 电压输出型增量式编码器(只能用于异步电机) , 线驱动型增量式编码器(配套永磁同步电机必须带有UVW信号) , 1V P-P型正余弦编码器(如海德翰ERN1387) , 旋转变压器二、接线1(主回路接线制动电阻电机B1B2-+冷却风扇FU1MCCBMCR1FVRS1RIMFWIMS-GL3-47P5AT1SUSUIVVMWTTWJ10正转运行/停止X1113.3kO(D种接地)FU-07*(注1)双股绞合屏蔽线反转运行/停止(选择件)X212ESEGA+PG多速段指令1X313A-推拉电平B+12V编码器B-多速段指令2X414主板J10FG多速段指令315X5FA脉冲监视输出FB外部基极封锁X818INP公共端203MB2MA故障接点输出1MCJ105M1[抱闸控制]F2M2多功能模拟量输入427F2:[-10~+10V/0~10V]FC29Y390V[准备完毕]YC62(PG卡接线图(1) 5V线驱动增量式编码器FU-04*扩展卡端子及其规格端子内容规格 NO.1 A相脉冲监视输出FA,2 A相脉冲监视输出FA,3 B相脉冲监视输出FB,线驱动输出(RS422电平输出) TM14 B相脉冲监视输出FB,5 Z相脉冲监视输出FZ,6 Z相脉冲监视输出FZ,E 屏蔽线连接端子1 编码器电源 DC,5V(?5%),最大200mA2 A相脉冲输入(,)3 B相脉冲输入(,)4 Z相脉冲输入(,) 线驱动输入(RS422电平输入)最高响应频率300kHz5 U 相脉冲输入(,)6 V相脉冲输入(,)7 W相脉冲输入(,)8 NC悬空 TM29 编码器电源地 DC 0V(电源用GND) 10 A相脉冲输入(,)11 B相脉冲输入(,)12 Z相脉冲输入(,) 线驱动输入(RS422电平输入)最高响应频率300kHz 13 U 相脉冲输入(,)14 V相脉冲输入(,)15 W相脉冲输入(,)(2) 12V电压输出增量式编码器FU-07*扩展卡端子及其规格端子内容规格 NO.ES 编码器电源ES DC,12V(?5%),最大80mAEG 编码器电源地EG DC 0V(电源用GND) A+ A相脉冲输入(,)A- A相脉冲输入(,) 线驱动输入(RS422电平输入)最高响应频率30kHz TM1 B+ B相脉冲输入(,)B- B相脉冲输入(,)FG 分频脉冲输出公共接点FG 分频输出公共端 FA 分频脉冲输出FA OC门输出(RS422电平输入)最高响应频率30kHz FB 分频脉冲输出FB(3) 1V P-P正余弦编码器FU-10*扩展卡端子及其规格端子内容规格 NO.1 A相脉冲监视输出FA,2 A相脉冲监视输出FA,3 B相脉冲监视输出FB,线驱动输出(RS422电平输出) TM14 B相脉冲监视输出FB―5 Z相脉冲监视输出FZ,6 Z相脉冲监视输出FZ,E 屏蔽线连接端子1 B相脉冲输入(,)2 NC悬空3 R相脉冲输入(,) 1V P-P 差分增量信号4 R相脉冲输入(,)5 A相脉冲输入(,)6 A相脉冲输入(,)7 编码器电源地 DC 0V(电源用GND)8 B相脉冲输入(,) 1V P-P 差分增量信号 TM29 编码器电源 DC,5V(?5%),最大200mA10 C相脉冲输入(,)11 C相脉冲输入(,)12 D相脉冲输入(,) 1V P-P 差分增量信号 13 D相脉冲输入(,)14 NC悬空15 NC悬空(4) 旋转变压器FU-05*扩展卡端子及其规格表端子 NO. 内容规格3 SIN- 正余弦波输入4 COS-5 REF- 激励信号 TM2 8 SIN+ 正余弦波输入 9 COS+10 REF+ 激励信号14 0V 正余弦所对应的OV GND1 脉冲监视输出电源地SG DC 0V(对应DC5V) TM12 Z相脉冲监视输出(FC,) 线驱动输出(RS422电平输出)DC5V,最大30mA3 B相脉冲监视输出(FB,)4 A相脉冲监视输出(FA,)6 脉冲发生器用电源TG DC 0V(对应DC,24V)7 脉冲发生器用电源PL2 DC,24V(2)8 脉冲清零信号输入(CLR,) 线驱动输入(RS422电平输入)最高响应频率300kHz9 控制脉冲输入(SIGN,) (输入模式:A+B、SIGN+PLUS、CCW+CW) 10 控制脉冲输入(PLUS,)12 Z相脉冲监视输出(FC,)13 B相脉冲监视输出(FB,) 线驱动输出(RS422电平输出)DC5V,最大30mA14 A相脉冲监视输出(FA,)16 脉冲发生器用电源PL3 DC,24V(3) 17 脉冲发生器用电源PL1 DC,24V(1) 18 脉冲清零信号输入(CLR,) 线驱动输入(RS422电平输入)最高响应频率300kHz19 控制脉冲输入(SIGN,) (输入模式:A+B、SIGN+PLUS、CCW+CW) 20 控制脉冲输入(PLUS,)三、控制逻辑C2.02C2.03C1.02C1.01C2.04??输出电流??C1.04C2.01零速阀值基极封锁输入方向信号速度运行速爬行速零速输READY出信抱闸控制号输出接触器时间说明:图形说明: ?-励磁时间(C3.02),预补偿转矩在这段时间输出有效电平 ?-开闸时间(C3.03),确保抱闸打开?-下闸保持时间(C3.05)无效电平 ?-掉电过渡时间(C3.06)无关曲线说明:C1.01-加速时间C1.02-减速时间C1.04–平层时间(选用切换功能)C2.01-加速起始拐角时间C2.02-加速结束拐角时间C2.03-减速起始拐角时间C2.04-减速结束拐角时间四、参数设置1( 异步电机模式参数参数号参数名称单位设置范围推荐值A2.01 0~5 2 控制模式A2.05 0~1 1 电流补偿选择2( 永磁同步电机模式参数参数号参数名称单位设置范围推荐值A2.01 0~5 5 控制模式A2.05 0~1 1 电流补偿选择3(运行信号、逻辑与时序参数号参数名称单位设置范围推荐值说明 B1.01 0~3 1 运行指令选择选择端子控制使能 B1.02 0~2 0 运行方式选择选择正反方向控制 B1.03 0~3 0 停止方式选择选择自动滑行 B1.04 0~6 1 选择端子控制频率频率指令选择C3.01 S 0.00~2.50 0.50 最小基极封锁时间S 0.00~2.50 0.50~0.90 用于开闸锁住电机,励磁/起动直流锁C3.02 设置值大于抱闸实际定时间动作时间 C3.03 S 0.00~2.50 0.20 开闸延迟时间用于抱闸控制 C3.04 S0.00~2.50 0.20 起动延迟时间下闸/停车直流锁S 0.00~2.50 0.50 C3.05 定时间*1C3.06 S 0.00~2.50 0.00 用于减轻掉电冲击输出停止过渡时间输出接触器动作延S 0.00~2.50 0.20 用于输出接触器控制 C3.07 时多功能输入端子 0~47 1 多段速1 H1.01 X3的功能选择多功能输入端子 0~47 2 多段速2 H1.02 X4的功能选择多功能输入端子 0~47 3 多段速3 H1.03 X5的功能选择多功能输入端子 0~47 25 基极封锁(常闭) H1.06 X8的功能选择多功能输出端子 0~48 8 抱闸控制H2.01 M1-M2的功能选择多功能输出端子 0~48 2 运行中 H2.02 Y1的功能选择4(ASR参数号参数名称单位设置范围推荐值说明0~100 20 E5.01. 按实际效果调整高速比例增益0~100 20 E5.02. 低速比例增益0~100 30 E5.03. 起动比例增益 E5.04. ms 0~1000 100 高速积分时间 E5.05. ms 0~1000 100 低速积分时间 E5.06. ms 0~1000 10 起动积分时间Hz 0.00~300.00 50.00 E5.07. ASR切换频率0~100 100 E5.08. 积分上限ms 0.1~25.0 1.0 E5.09. 力矩滤波时间 E5.10. % 0.0~900.0 180.0 拖动力矩上限 E5.11. % 0.0~900.0 180.0 制动力矩上限 E5.12. 0~7 0 力矩上限来源力矩极限变化时S 0.01~2.50 0.10 E5.13. 间0~150 50 E5.17. 电流增益% 20~100 60 E5.18. 0Hz电流增益5(附加参数(1) 永磁同步无称重补偿起动调整(配正余弦编码器)参数号参数名称单位设置范围推荐值说明起动位置锁定选 0~1 1 锁定有效 B1.13. 择S 0.00~2.50 0.50~0.用于开闸锁住电励磁/起动直流锁C3.02 90 机,设置值大于抱定时间闸实际动作时间 E5.03 0~100 40~60 起动比例增益E5.06 ms 0~1000 6~10 起动积分时间E5.16 0.0~10.0 1.5~2.5 位置伺服增益(2) 称重补偿起动调整(0~10V称重信号)参数号参数名称单位设置范围推荐值说明0~1 1 B1.13. 锁定有效起动位置锁定选择J2.01. 0~2 2 力矩偏置补偿方式 F2口输入称重信号正转制动(空载上% 0.0~100.0% 根据载荷调整 J2.02. 行)补偿力矩反转拖动(空载下% 0.0~100.0% J2.03. 行)补偿力矩正转拖动(满载上% 0.0~100.0% J2.04. 行)补偿力矩反转制动(满载下% 0.0~100.0% J2.05. 行)补偿力矩0~1 0:上行为正向 J2.06. 起动补偿力矩方向1:下行为正向6(运行保护参数号参数名称单位设置范围推荐值说明 L1.01 0~4 1 电机过载保护使能保护有效min 0.1~10.0 1.0 L1.02 150%过载1分钟电机过载保护时间0~4 1 L2.01 过热保护使能50~120 85 L2.02 ? 过热保护温度1~250 10 L2.03 S 过热保护时间20~100 45 L2.04 风扇停止温度 ?0~1 1 L2.05 有效 OH2保护使能0~1 1 L3.01. 有效过力矩保护功能% 0.0~500.0 180% L3.02. 过力矩保护阀值L3.03. S 0.1~25.0 3.0 过力矩检测时间L4.01. 0~4 1 失速保护使能有效L4.02. % 1~50 10 失速保护阀值频率%S 0.01~2.50 0.50 L4.03. 失速保护时间0~4 1 L4.04. 有效超速保护功能% 1~120 105 L4.05. 超速保护阀值频率%L4.06. S 0.01~2.50 0.50 超速保护时间L5.01. 0~1 1 编码器断线保护功能有效五、调试方法1(准备工作(1) 按照推荐参数表,输入常规参数。
蒙德IMSMF交流伺服驱动器使用说明书
产品运转前请认真阅读说明书,并请保存好,以便以后查阅。
M O D R O L E L E C T R I C C O .,L T D .蒙德IMS-MF 系列使用手册交流伺服驱动器安装接线及参数一览表400V 级1.5kW ~55kW(E)NO:JSWJ-01-21-02-01目录第1章使用铭牌说明………………………………………………………………………………1-1机型与尺寸……………………………………………………………………………1-2安装场所的确认与管理………………………………………………………………1-4安装方向与空间………………………………………………………………………1-5第2章接线连接周边机器…………………………………………………………………………2-1端子台的构成…………………………………………………………………………2-2相互接线………………………………………………………………………………2-4控制回路端子的功能…………………………………………………………………2-6FU-05*扩展卡…………………………………………………………………………2-9FU-08*扩展卡………………………………………………………………………2-10第3章数字式操作器和参数组的概要数字式操作器…………………………………………………………………………3-1参数组的概要…………………………………………………………………………3-4第4章参数一览表参数一览表与内容说明………………………………………………………………4-1监视参数………………………………………………………………………………4-2系统操作………………………………………………………………………………4-3应用参数………………………………………………………………………………4-4第5章报警检查报警检出………………………………………………………………………………5-1报警说明………………………………………………………………………………5-6第6章调试过程及功能应用试运行的操作…………………………………………………………………………6-1速度控制………………………………………………………………………………6-4位置控制………………………………………………………………………………6-5主轴定位………………………………………………………………………………6-6刚性攻丝………………………………………………………………………………6-8附录…………………………………………………………………………………6-10使用本章节说明驱动器到货时以及安装时的确认事项。
蒙德IMS-GF_4011变频器使用手册

ELECTRIC CO.,LTD.。
MODROLIMS-G F系列使用手册交流伺服驱动器400V级1.5KW~55KW产品运转前请认真阅读说明书,并保存好,以备今后查阅。
VERSION:VS501目录第1章概要1.1功能 (5)1.2性能指标 (6)第2章变频器的相关说明2.1铭牌说明 (8)2.2外形尺寸、安装尺寸 (9)2.3安装场所 (9)2.4安装方向及空间 (10)第3章接线3.1接线图 (12)3.2端子台的构成 (13)3.3主回路端子的功能 (13)3.4主回路的接线 (14)3.5控制回路的功能 (15)3.6跨线与跳针 (16)3.7PG卡的安装及接线 (16)3.8控制回路接线注意事项 (16)第4章操作器的使用4.1操作器的功能 (18)4.2操作器的使用 (18)4.2.1操作键的功能 (18)4.2.2参数操作例: (19)4.3参数组别: (20)4.4系统操作: (21)4.4.1参数存取密码(A1) (21)4.4.1.1加密操作 (21)4.4.1.2开密码锁/解密操作 (22)4.4.2自学习(A3) (23)第5章参数一览表5.1常用可选监视参数 (25)5.2监视参数 (25)5.2.1U1.:状态监视 (25)5.2.2U2.:端子监视 (25)5.2.3U3.:故障记录 (26)5.2.4U4.:当前故障信息记录 (26)5.3系统操作 (27)5.3.1A1系统操作 (27)5.4系统参数 (28)5.4.1系统参数一览表 (28)5.4.2应用(B)的参数一览表 (29)5.4.3曲线时序(C)的参数一览表 (31)5.4.4频率指令关系(D)的参数一览表 (32)5.4.5电机参数(E)的参数一览表 (33)5.4.6外部端子功能(H)的参数一览表 (35)5.4.7外部端子功能辅助设定(J)的参数一览表 (37)5.4.8保护功能(L)的参数一览表 (39)5.4.9操作器(O)的参数一览表 (42)第6章参数的说明6.1停止方式 (45)6.1.1惯性停止(B1.03.=0) (45)6.1.2减速停止(B1.03.=1) (45)6.1.3有时间限制减速停止(B1.03.=2) (45)6.1.4有直流制动惯性停止(B1.03.=3) (45)6.1.5全领域直流制动停止(B1.03.=4) (46)6.2直流制动 (46)6.3加减速时间的设定: (46)6.4加减速拐角时间的设定 (47)6.5运行时序 (47)6.6多段速指令/点动频率的选择 (48)6.7跳跃频率 (49)6.8驱动器容量的设定 (49)6.9载波频率的设定 (49)6.10V/F曲线的设定 (50)6.11控制滑差 (50)6.12速度控制(ASR)的构成 (50)6.13多功能输入端子的功能一览表 (51)6.14UP/DOWN指令 (52)6.15运行指令3线制 (53)6.16计时器功能 (53)6.17主轴定位 (53)6.18刚性攻丝 (54)6.19多功能输出端子的功能一览表 (54)6.20零速信号 (55)6.21速度一致信号 (55)6.22力矩补偿方式的设定 (55)6.22.1开关称重力矩补偿起动(J2.01.设定为1) (55)6.22.2模拟称重力矩补偿起动(J2.01.设定为2) (56)6.23模拟口输入的设定 (56)6.24模拟口输出的设定 (57)6.25输入/输出端子的监视 (57)第7章保护功能及故障显示7.1故障检出 (59)11.1功能 (5)1.2性能指标 (6)1.1功能MODROL公司IMS-GF系列通用型驱动器采用智能功率模块IPM模块,具有集驱动、保护、功率交换于一体的优点,大大提高整机的可靠性;采用优化的PWM生成技术,输出谐波小;丰富的保护功能,使驱动器及周边设备的使用寿命更长!■具有V/F曲线控制、无传感矢量控制、电流矢量控制、磁通矢量控制四种电机控制模式,具有低速高转矩、低噪音等优点,适合不同的应用场合■可驱动交流异步电机、交流永磁同步电机■强大的控制功能转矩提升、全领域直流制动、速度搜索、PID控制、输出电压自动调整(AVR)等■接口丰富可切换的共发射极/共集电极端子输入模式标准的通信接口RS-422/485脉冲输入/输出■频率指令的种类�操作器直接设定�操作器UP/DOWN设定�外部端子多段速控制�外部端子UP/DOWN设定�模拟量输入�脉冲输入■特殊功能应用模式�主轴定位�刚性攻丝�PID控制�卷绕控制■客户化功能追加具有系统的客户化功能追加体系,轻松实现控制驱动一体化。
刀库连接调试手册

刀库连接调试手册广州帝恩斯自动化设备有限公司一、998/098系列数控系统外形尺寸附加面板(竖式系统附加面板)二、系统电源:1>输入:L、N(AC):从隔离变压器取AC200V2>输出:+V:+24V-V:0V(共两路)3>系统I/O接口中的+24V和0V与开关电源的+24V、0V同一属性,接线时也可直接在开关电源里引出+24V和0V.998MCi系列数控系统信号接口一、进给驱动信号DNC-82进给伺服驱动信号接线图1>系统与DNC-82驱动器系统信号口15孔,焊线用15针信号意义导线颜色DNC-82驱动器信号口为25孔,焊线用25针1CP+棕209CP-白72DIR+蓝1910DIR-灰65ALM黄173PC绿10110V黑16-18短接424V红1-22短接金属外壳屏蔽网线金属外壳二、主轴编码器CN21编码器/CN15主轴接口与蒙德IMS-MF(7.5KW)伺服主轴的连接:(参考:IMS-MF说明书P2-5页)DNC998MCi CN21编码器接口导线颜色IMS-MF(7.5KW)伺服主轴驱动器20位高密头接口3(*PCS)2(FZ-)4(PCS)12(FZ+)5(*PBS)3(FB-)6(PBS)13(FB+)7(*PAS)4(FA-)8(PAS)14(FA+)DNC998MCiCN15主轴接口1(CP+)20(PLUS+)14(CP-)10(PULS-)2(DIR+)19(SIGN+)15(DIR-)9(SIGN-)三、手轮信号信号与外挂手轮的连接(以荣德RDF-05L-100B外挂手轮为例)DNC998MCI系统信号意义RDF-05L-100B外挂手轮CN31接口155V VCC(红)100V0V(黑)1HA+A(黄)2HA-/A(粉)3HB+B(白)4HB-/B(紫)9(X5.5)×1×1(透明)22(X5.6)×10×10(绿黑)23(X5.7)×100×100(透明黑)5(X5.0)MPG_X X(绿)6(X5.1)MPG_Y Y(橙)8(X5.2)MPG_Z Z(棕)20(X5.3)MPG_4TH4TH21(X5.3)MPG_5TH5TH18+24V COM(浅蓝)120V+L(红黑)17+24V-L(蓝黑)注:1>外挂手轮的+L和-L是指示灯,可不接。
蒙德驱动器资料

-10~50℃
周围湿度
5~90%RH不结露
海拔高度
低于3000米(但对1001~3000米场所要降额使用)
振动
2~9Hz:振幅=3mm;9~20Hz:9.8m/S2
保存温度
-25~55℃
保存湿度
5~95%RH
通讯
RS485/RS422
选配
CAN
选配
伺服功能
正/反向限制;速度控制;位置控制;主轴准停;刚性攻丝;C轴控制;电子齿轮。
参数NO.
名称
内容
设定范围
出厂设定
P5.05.
模拟指令口选择
频率指令由模拟口给定时模拟信号通道选择0:模拟口1;1:模拟口2;2:模拟口3;4/5/6/7:通讯口;8:脉冲频率给定
0,1,2,3,4
5,6,7,8
1
当速度指令来源于模拟量:
MF出厂默认模拟量输入口为F2(0~10V或-10V~+10V),若需要接其他模拟口,请在『P5.05』进行相应设置。当模拟量指令为10V,电机将运行到设定的最高转速『P1.11』。
MODEL:驱动器型号
INPUT:输入电源参数
OUTPUT:驱动器输出参数
SER NO:机身编号
MASS:重量
图1.1铭牌
在铭牌上的驱动器型号『MODEL』一栏里用数字和字母表示了驱动器的系列号、电压等级、最大适用电机容量以及改版记号。
图1.2驱动器1.5~75kW的型号说明
■
图1.3 1.5~5.5kW驱动器的外型图
脉冲指令形态
电机正转指令
电机反转指令
A、B正交
脉冲+方向
CW脉冲+CCW脉冲
0.10
蒙德变频加工中心主轴调机内容

4
数值,并将该数值输进参数 J4.01.中。设定定位角度。 4、 设定参数 H1.01.=29,将输入端子 X3 设定为定位端子;设定参数 H2.03.=24,将输出端
5
刚性攻丝
模拟量修调: 进行刚性攻丝设定前,请先对模拟量进行修调。使系统给定速度与电机实际转速达到精 确控制。模拟量电源输入线缆请选用双绞屏蔽线。
注意:调整过程中请注意系统设定模拟量与转速的对应参数数值与驱动器设置最高输出频率(模拟量 10V 对应输出频率)数值是否匹配。
调整步骤: (1)断开驱动器侧模拟量电源线,系统给定转速,使模拟量值与给定转速相对应; (2)连接驱动器侧模拟量电源线,系统给定转速,使模拟量值与给定转速相对应; (3)在保证屏蔽处理恰当、参数 H3.01.=100、H3.02.=0、H3.08.=0 的前提下,系统给
检查上位机接受信号是否正常。
2、编码器线数的检查(AB 相正交编码器)
在编码器线数未知的前提下,将编码器线数设定为 2500,用手转动电机主轴至 U2.06.=0000 后,再转动主轴一圈,读取 U2.06.数值 a,该编码器线数为 a/4。
二、试运行(必须在电机空载情况下进行)
设定相应电机参数与编码器参数,并将 B1.01.与 B1.02.置“0”。用操作器给定电机频率运行。
Y
器PG卡经驱动器接地。
连接TM1信号
相对FC端子,分别于电容C1、C2、C3两端
测量SIGN、PLUS、CLR信号是否正常?
N 检查脉冲发生器接线是否正确?
主轴系统的连接与调试

一、 主轴伺服系统的组成、分类 二、 CNC装置与主轴驱动装置的信号连接 三、 主轴分段无级调速的控制 四、 主轴准停控制
4:主轴驱动系统的连接与测试
一、 主轴伺服系统的组成、分类
1.概念
主轴驱动系统也叫主传动系统,是在系统中完成主运动的动力装置 部分。主轴驱动系统通过该传动机构转变成主轴上安装的刀具或工 件的切削力矩和切削速度,配合进给运动,加工出理想的零件。它 是零件加工的成型运动之一,它的精度对零件的加工精度有较大的 影响。
二、 CNC装置与主轴驱动装置的信号连接
1.变频器控制方式的发展: 电压矢量控制——磁通矢量控制—
—直接转矩控制——采用通用变频器。 “通用”:
(1)可以和通用的笼型异步电动机 配套应用;
(2)具有多种可供选择的功能,可 应用于不同性质的负载。
二、 CNC装置与主轴驱动装置的信号连接
2.实例:三菱FR—A50系列主回路端子和控制回 路端子如图所示 (1)输入信号(用于起动和功能设定) (2)模拟信号(用于频率设定) (3)输出信号
1)准备好信号RDY 2)急停信号EMG 3)正反转信号FOR、REV 4)转矩高低极限控制信号TLH、TLL 5)软起动信号SSC 6)速度调节器选择信号PPI 7)速度设定方式信号DAS 8)零速输出信号ZSPD……
5.实例:FANUC 0i系统对交流主轴驱动的 控制
(1)模拟主轴伺服的控制 模拟主轴控制即为传统的模拟量
SA+ SASB+ SBSZ+ SZ+5V GND
PE
速 度控 制 信号
A+
A-
B+
B-
主 轴编 码 器
Z+
14、主轴编码器及模拟主轴功能的调试

主轴编码器及模拟主轴功能的调试
1、连接主轴编码器电缆,电缆连接至控制单元后部[SP-POS]插口
2、接通机床电源及控制单元电源,更改参数3798=0,主轴编码器即可生效
3、将操作方式切换至MDI或MEM方式,进行M03或M04控制,并检查指令S值同实际S值是否一致,在确定主轴调速装置参数、线路连接正确,同时参数3741和3742主轴I档、II档最高转速设置正确的前提下,根据以下公式可进行适当调整:
3731设置主轴速度模拟输出的偏置电压调整值,一般通过
此参数来调整模拟给定的偏差
通过以下方法进行设置:
1、设置标准数据0
2、通过自动方式执行S0指令,测量0V时系统输出
的模拟电压值。
3、通过此公式计算增益调整值:
设定值=(-8191X测量值)/12.5
3741 主轴1档的主轴最高转速值
3742 主轴2档的主轴最高转速值。
蒙德IMS-GF3系列使用说明书
M O D R O L E L E C T R I C C O .,L T D .蒙德IMS-GF3系列使用手册交流伺服驱动器安装接线及参数一览表400V 级1.5KW ~110KW(E)产品运转前请认真阅读说明书,并保存好,以备以后查阅。
NO:JSWJ-01-03-05-01目录第1章使用IMS-GF3的介绍…………………………………………………………………………………1-1产品到货时的确认………………………………………………………………………………1-3外型尺寸安装尺寸.……………………………………………………………………………1-5安装场所的确认和管理.………………………………………………………………………1-6安装方向和空间.………………………………………………………………………………1-7第2章接线连接周边机器.................................................................2-1相互接线.....................................................................2-2端子台的构成.................................................................2-5主回路端子的接线.............................................................2-7控制回路端子的说明..........................................................2-12接线检查....................................................................2-16扩展卡的安装·接线..........................................................2-17第3章数字式操作器和参数组的概要数字式操作器.…………………………………………………………………………………3-1参数组的概要.…………………………………………………………………………………3-3第4章参数一览表参阅方法.………………………………………………………………………………………4-1参数组别.………………………………………………………………………………………4-2参数一览表.……………………………………………………………………………………4-3多功能端子代号………………………………………………………………………………4-38第5章报警检查报警显示功能................................................................5-1报警故障分析...............................................................5-10使用 本章节说明驱动器到货时以及安装时的确认事项。
蒙德驱动器主轴MF调试步骤精编版

蒙德驱动器主轴M F调
试步骤精编版
MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】
MF )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二.参数设置以及自学习:(空载或者轻载的情况下)
1.输入密码OP8=0000
2.初始化OP4=0,按两下
RUN
;OP4=100,按两下
RUN。
(出厂已经设置好)
P2.加减速时间
特性
P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视有没有的脉冲值0~变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4.自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6
行时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小则为正常。
注:如果试运行过程中电机振动,请将、、的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
及以下(小机壳):
及以上(大机壳):。
新代伺服调试手册——主磁包套篇V2.1

SPD-32A2-075,SPD-32A1-110 安装尺寸
5
SPD-32A1-185 SPD-32A1-185 安装尺寸
6
1.2 串列向量控制配线图
图一:串列向量控制配线图 ★连接电源 R、S、T、地线 ★连接马达 U、V、W、地线 ★制动电阻,接 B1 和 B2 端子 ★马达编码器线,接驱动器第一回授口 ★串列 MⅡ通讯线,接驱动器 CN2 口 ★电机过热保护,接 TB16IN 端子板;或者参考泛用伺服配线连接接法
电机的重大变更,文件作部分
修正;
修改惯量比抓取方式;
修改驱动尺寸图片;
11 文件格式修正,重新排版; 2014-8-04
12 修改将 P20 改成 Fn
2014-09-19
作者 程海洲 程海洲
更改后版本 V1.0 V1.1
程海洲 V1.2 程海洲 V1.3
郭浩
V1.4
郭浩
V1.5
郭浩、李 V1.6
维伟
更改日期 2013-11-28 2013-12-13 2013-12-26 2014-1-20 2014-3-21
2014-4-14 2014-5-1
8
新增安装软件驱动,常见问题 2014-5-13
QA;
新增附录 4 主轴包套常见问
题 QA
9
新增驱动器安装尺寸图
2014-5-16
10 新增针对 K22+KTY84 编码器 2014-8-04
若是第一次使用调机软件也请依下列步骤进行安装打开电脑设备管理器打开其他设备右键单击mcp2200usbserialemulator选择更新驱动程序软件选择浏览计算机以查找驱动程序软件21点击浏览选择驱动程序mcp2200路径见下图所示包括子文件夹打钩然后点击下一步22选择驱动程序mcp2200路径23驱动程序mcp2200安装成功后端口com和lpt显示usbserialportcomxx若安装失败提示这个inf中服务安装段落无效等错误信息则有可能是因为安装了ghost系统系统缺少相应的组件造成的请点击计算机系统属性windowsupdate执行更新后即可安装
蒙德MD600 电梯一体化控制器用户手册
M O D R O L E L E C T R I C C O.,L T D.MD600电梯一体化控制器用户手册产品运转前请认真阅读说明书,并保存好,以备以后查阅。
NO:6004-01000-023目录功能说明 (3)第一章:安全与注意事项 (7)1.1安全标志定义: (7)1.2安全事项: (7)第二章:产品信息 (9)2.1产品命名与铭牌 (9)2.2MD600系列一体化控制器主要技术参数 (10)2.3产品外观及安装尺寸 (13)2.4保养与维护 (16)第三章:安装与接线 (18)3.1系统配置简介 (18)3.2电气安装及接线 (20)第四章:调试工具使用说明 (36)4.1MD600电梯一体化控制器调试工具 (36)4.2小键盘操作器 (36)4.3安卓调试操作器主界面显示 (40)4.4各分界面说明 (41)4.5安卓调试通信通道设置 (42)4.6OP08操作器说明: (43)第五章:应用与调试 (45)5.1电梯调试流程图 (45)5.2电梯调试步骤 (45)5.3电梯功能调试 (52)5.4舒适感调试 (53)第六章:功能参数表 (55)第七章:功能参数说明 (77)7.1F0组电梯规格 (77)7.2F1组主机控制参数 (78)7.3F2组时序曲线参数 (81)7.4F3组时间参数 (84)7.5F4组舒适感调整参数 (86)7.6F5组距离参数 (88)7.7F6组上行平层偏差调整 (89)7.8F7组下行平层偏差调整 (90)7.9F8组楼层显示参数 (90)7.10F9组服务楼层与门布局参数 (91)7.11FA组输入端口设置 (92)7.12FB组输出端口设置 (97)7.13FC组保护功能参数 (99)7.14FD组功能参数 (102)7.15FF组用户参数 (107)7.16FH组监视参数 (107)7.17FL组故障监视参数 (118)7.18FP组驱动故障参数 (120)7.19FU组驱动故障参数 (120)第八章:故障信息 (122)8.1故障类别 (122)8.2故障信息及处理方法 (122)功能说明第一章:安全与注意事项1.1 安全标志定义:本手册中安全注意事项分二类:有关安全标记的说明,表示内容非常重要,请务必遵守。
蒙德IMS-MF交流伺服驱动器使用说明书

产品运转前请认真阅读说明书,并请保存好,以便以后查阅。
M O D R O L E L E C T R I C C O .,L T D .蒙德IMS-MF 系列使用手册交流伺服驱动器安装接线及参数一览表400V 级1.5kW ~55kW(E)NO:JSWJ-01-21-02-01目录第1章使用铭牌说明………………………………………………………………………………1-1机型与尺寸……………………………………………………………………………1-2安装场所的确认与管理………………………………………………………………1-4安装方向与空间………………………………………………………………………1-5第2章接线连接周边机器…………………………………………………………………………2-1端子台的构成…………………………………………………………………………2-2相互接线………………………………………………………………………………2-4控制回路端子的功能…………………………………………………………………2-6FU-05*扩展卡…………………………………………………………………………2-9FU-08*扩展卡………………………………………………………………………2-10第3章数字式操作器和参数组的概要数字式操作器…………………………………………………………………………3-1参数组的概要…………………………………………………………………………3-4第4章参数一览表参数一览表与内容说明………………………………………………………………4-1监视参数………………………………………………………………………………4-2系统操作………………………………………………………………………………4-3应用参数………………………………………………………………………………4-4第5章报警检查报警检出………………………………………………………………………………5-1报警说明………………………………………………………………………………5-6第6章调试过程及功能应用试运行的操作…………………………………………………………………………6-1速度控制………………………………………………………………………………6-4位置控制………………………………………………………………………………6-5主轴定位………………………………………………………………………………6-6刚性攻丝………………………………………………………………………………6-8附录…………………………………………………………………………………6-10使用本章节说明驱动器到货时以及安装时的确认事项。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
蒙德驱动器主轴(M F )调试步骤
一.上电前检查
检查驱动器的接线是否和设计要求相符合,接线是否可靠连接,并予以确认后,方可上电。
接线图详见附件。
二. 参数设置以及自学习:(空载或者轻载的情况下)
1. 输入密码OP8=0000
2.初始化OP4=0,按两下
;OP4=100, 按两下。
(出厂已经设置好)
P2.加减速时间
P3.ASR特性
在电机不振动的情况下尽量调大P3.01-P3,.03,调小P3.04-P3.06,以提高刚性和响应性
P4.位置伺服
P5.模拟量输入调整
P6.脉冲输入控制
P7.主轴定位
完成之后按运行/停止进行键复位,用手转动电机主轴,同时监视U2.06有没有的脉冲值0~360.0变化,有则可以进行自学习;如果没有,请检查编码器线缆。
4. 自学习
用OP3=2进行旋转型自学习线间电阻及电机漏抗%、以及电机的空载电流,自学习期间操作面板显示为实时电流,自学习成功之后驱动器回到最初界面。
若不成功,请阅读说明书5-6进行查看和处理。
三.试运行:
进入OP6键,
键,电机将以设定的频率反向运行,试运
行时,驱动器显示界面会自动从频率显示变化到实时电流显示,正反转电流接近大小则为正常。
注:如果试运行过程中电机振动,请将E5.01、E5.02、E5.03的增益参数设小再试运行同时检查电机参数以及编码器参数有没有设错。
试运行正常之后就可以接入系统由系统来控制。
附件:接线图
5.5KW及以下(小机壳):
7.5KW及以上(大机壳):。