(完整版)arduino循迹小车毕业设计
基于arduino的智能小车的设计-毕业论文(湖南智宇科教设备有限公司)2017-3-8

基于arduino的智能避障小车的设计摘要本文简要介绍了基于智能轮式移动机器人智能避障设计与实现----一种基于Arduino新型集成开发环境的超声波避障小车的工作原理。
其中包括对小车的执行组件、搭建结构、传感器、Arduino单片机软件编程及试验结果的介绍。
本方案以Arduino单片机为控制核心,基于蝙蝠超声波测距的原理,利用超声波传感器,检测小车前方障碍物的距离,然后把数据传送给单片机。
当超声波检测到距离小车前方25CM有障碍物时单片机就发出指令让小车左转一定角度,然后停止行进继续探测.如果前方25CM没有障碍物则直行,否则继续左转一定角度。
如此通过超声波不断的循环检测周边环境的情况进行自动避障。
本系统在硬件设计方面,以Arduino单片机为控制核心,以超声波传感器检测前方障碍物,从而自动避障。
在软件方面,利用Arduino语言进行编程,通过软件编程来控制小车运转。
该系统在驱动方面采用L298N驱动2个直流电机带动小车运行。
并且,用PWM系统调速,控制小车前进的速度。
实现小车根据外部环境,做出前进、后退和转向等动作,从而完成避障的功能,本设计具有有一定的实用价值。
关键词:Arduino单片机;超声波传感器;避障AbstractThis paper describes the design of mobile robot behavior-based design and implement ---- A new ultrasound-based integrated development environment Arduino obstacle avoidance car works. These include the implementation of car components, building structures, sensors, Arduino microcontroller software programming and test results presentation.The program to Arduino microcontroller core, based on the principle of ultrasonic distance measurement bats using ultrasonic sensors to detect obstacles in front from the car, and then transmits the data to the microcontroller. When the ultrasonic distance in front of the car detects obstacles 25CM SCM issued a directive to make the car turn left on an angle, then continue probing stop traveling. If there is no obstacle in front of the 25CM straight, turn left or continue certain angle. So the case of the ultrasonic continuous loop through the surrounding environment to automatically detect avoidance.The system hardware design to Arduino microcontroller core, with ultrasonic sensors detect obstacles in front, so that automatic obstacle avoidance. On the software side, the use of Arduino programming language to control the car running through software programming. The system uses the driver side L298N drive two DC motors drive the car running. And, with the PWM system speed, speed control car forward. Realize the car according to the external environment, made forward, backward, and steering movements, thus completing the obstacle avoidance function, the design has a certain practical value.Key words: Arduino; ultrasonic sensors;obstacle avoidance目录摘要 (1)Abstract (2)第一章绪论 (5)1.1、论文的选题背景 (5)1.2、Arduino单片机概述 (6)1.3、Arduino机器人发展现状 (7)1.4、Arduino智能避障机器人研究意义和目的 (9)1.5、项目主要研究内容 (9)第二章避障小车机器人的总体设计 (10)2.1、设计原理与方法 (10)2.2、硬件设计 (10)2.3、软件设计 (11)2.3.1、Arduino语言 (11)2.3.2、Arduino IDE (12)2.4、设计前期准备 (14)第三章硬件模块 (16)3.1、各模块的的基本性能 (16)3.1.1、单片机模块 (16)3.1.2、电机、电机驱动模块 (17)3.1.3、避障模块 (19)3.1.4、电源模块 (19)3.2、小车的基本搭建 (20)3.3、电路连线 (28)3.3.1、电机的连线 (28)3.3.2、超声波云台接线 (32)第四章软件模块 (34)4.1、软件设计思路 (34)4.2、程序设计代码 (35)第五章实验及结果分析 (42)5.1、预期目标 (42)5.2、遇到的问题和解决方法 (42)5.3、硬件的调试与整合 (43)5.3.、调试思路 (43)5.3.2、调试超声波模块 (44)5.3.3、电机调试 (44)5.4、心得体会 (45)第六章设想与展望 (46)参考文献 (47)致谢 (48)第一章绪论1.1、论文的选题背景随着现代计算机技术的不断发展和普及,机器人的发展已经遍及近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
毕业设计基于单片机的智能循迹小车

第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
移动机器人是机器人学中的一个重要分支,出现于20世纪06年代。
当时斯坦福研究院(SRI)的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。
从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。
智能小车,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航及白动控制等技术,是典型的高新技术综合体。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:(1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作;(2)摄像机,用来获得道路图像信息;(3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆技术按功能可分为三层,即智能感知/预警系统、车辆驾驶系统和全自动操作系统团。
上一层技术是下一层技术的基础。
三个层次具体如下:(1)智能感知系统,利用各种传感器来获得车辆自身、车辆行驶的周围环境及驾驶员本身的状态信息,必要时发出预警信息。
主要包括碰撞预警系统和驾驶员状态监控系统。
碰撞预警系统可以给出前方碰撞警告、盲点警告、车道偏离警告、换道/并道警告、十字路口警告、行人检测与警告、后方碰撞警告等.驾驶员状态监控系统包括驾驶员打吨警告系统、驾驶员位置占有状态监测系统等。
自动循迹小车毕业设计

自动循迹小车毕业设计毕业设计:自动循迹小车摘要:本毕业设计致力于设计和制作一种自动循迹小车。
该小车能够在给定的路径上自动行驶,并根据环境中的线路进行循迹操作。
设计方案基于Arduino控制器和红外传感器实现,小车能够感知到路径上的线路,并据此进行正确的行驶操作。
此外,设计还包括电机驱动,电源供应和用户界面等功能模块。
实验结果表明,该自动循迹小车能够高效准确地行驶在指定的路径上。
关键词:1.引言2.设计原理自动循迹小车的设计方案基于Arduino控制器和红外传感器。
红外传感器能够感知到路径上的线路,从而确定小车的行驶方向。
Arduino控制器能够接收传感器的数据并根据预先编写的程序进行控制操作,例如调整电机速度和方向等。
整个设计系统的模块主要包括传感器模块,控制器模块,电机驱动模块和电源供应模块。
3.系统设计3.1传感器模块本设计中使用红外传感器来感知路径上的线路。
传感器模块负责采集红外传感器的数据,并将其传输给控制器模块进行处理。
3.2控制器模块控制器模块由Arduino控制器组成。
它通过连接传感器模块和电机驱动模块来接收传感器数据,并根据编写的程序进行控制操作。
控制器模块具有高度灵活性和可编程性,使得小车能够按照预先设定的规则行驶。
3.3电机驱动模块电机驱动模块负责控制小车的速度和方向。
根据传感器数据,控制器模块会发送相应的指令给电机驱动模块,以控制小车的行驶。
3.4电源供应模块电源供应模块为整个系统提供所需的电力。
它负责将来自电池或电源适配器的直流电源转换为小车所需的电压和电流。
4.实验结果和讨论通过设置合适的传感器感应距离,测试了自动循迹小车在给定路径上的行驶性能。
实验结果表明,该小车能够稳定地沿着给定的路径行驶,并根据环境中的线路进行循迹操作。
5.结论本毕业设计成功地设计和制作了一种自动循迹小车。
该小车能够准确地沿着给定的路径行驶,并根据环境中的线路进行循迹操作。
通过这个设计,我们可以更深入地理解自动控制和传感器应用的原理和实践。
自动循迹小车毕业设计

-xxxxxx学院xxx 系xxx 专业xx 级毕业设计(论文)xx 学号xxxxxxxx指导教师(签名)xxx二○年月日烟台工程职业技术学院毕业设计(论文)诚信承诺书本人慎重承诺:我所撰写的设计(论文)《》是在老师的指导下自主完成,没有剽窃或抄袭他人的论文或成果。
如有剽窃、抄袭,本人愿意为由此引起的后果承担相应责任。
毕业论文(设计)的研究成果归属学校所有。
学生(签名)年月日目录目录 0摘要: (3)前言 (3)一.任务要求 (4)(一)任务 (4)二.系统设计方案 (5)(一)小车循迹原理 (5)(二)控制系统总体设计 (6)三.系统方案 (7)(一)寻迹传感器模块 (7)1.红外传感器ST188简介 (7)2.比较器LM324简介 (8)3.具体电路 (9)4.传感器安装 (10)(二)控制器模块 (11)(三)电源模块 (13)(四)电机及驱动模块 (14)1.电机 (14)2.驱动 (14)(五)自动循迹小车总体设计 (16)1.总体电路图 (16)2.系统总体说明 (18)四.软件设计 (18)(一)PWM控制 (18)(二)总体软件流程图 (19)(三)小车循迹流程图 (19)(四)中断程序流程图 (21)(五)单片机测序 (22)五.致谢 (25)六.参考资料 (27)自动循迹小车摘要:本设计是一种基于单片机控制的简易自动寻迹小车系统,包括小车系统构成软硬件设计方法。
小车以AT89C51 为控制核心, 用单片机产生PWM波,控制小车速度。
利用红外光电传感器对路面黑色轨迹进行检测,并将路面检测信号反馈给单片机。
单片机对采集到的信号予以分析判断,及时控制驱动电机以调整小车转向,从而使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹的目的。
关键词:单片机AT89C51 光电传感器直流电机自动循迹小车前言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究。
(完整版)arduino循迹小车毕业设计
目录 3 循迹小车设计 . ..........................摘要........................................................... 2 3.1 硬件设计 . ........................引言 (2)3.1.1 单片机最小系统 . ................1 Arduino 智能小车设计方案与参3.1.2 灰度传感器模块 . ................数 .............................................................33.1.3 电机驱动电路 . ..................1.1 Arduino 智能小车设计方3.2 软件设计 . ........................案简介....................................................... 3 3.2.1 系统主程序 . ....................1.1.13.2.2 本系统编译器 . .................. 功能要求 (3)1.1.23.3 实物展示 . ........................ 基本原理 (3)1.23.4 部分程序展示 . .................... 循迹小车参数 . (4)2 Arduino 与 51结论 . .................................. 单片机的区别 . (5)2.1 Arduino致谢 . .................................. 单片机 . .. (5)2.1.1 Arduino参考文献 . ................................ 单片机的介绍 . (5)2.1.2 Arduino单片机的特色. (5)2.1.3 Arduino单片机的功能.Arduino 循迹小车 (5)2.2 51 单片机 (6)设计与实现2.2.1 51 单片机的介绍 . (6)摘要:循迹小车是 Arduino 单2.2.2 51 单片机的功能 . (6)片机的一种典型应用。
循迹小车毕业设计--循迹小车设计

毕业设计题目循迹小车设计英文题目The design of car tracking学生姓名:申请学位级别工学学士学号:专业:机械电子工程系别:机械与电子工程系指导教师:职称:二零一三年六月三日摘要该设计是为一个简易的循迹小车软硬件系统,该小车是基于8位的51单片机进行用控制的,循迹小车的研究意义涵盖了勘探、工业、生活以及探月工程。
循迹是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。
从设计的功能要求出发,设计包括了小车控制系统的软件设计和硬件设计。
小车采用了简易的三轮构架式,用由前两轮驱动并控制转向的控制模式。
控制系统以STC89C52为控制核心, 由STC89C52产生PWM波,控制小车速度。
利用红外光电传感器探头对路面黑色轨迹进行检测,并确定小车当前的位置状态,再将路面检测信号反馈给STC89C52。
STC89C52对采集到的信号予以分析判断,及时控制并驱动电机以调整小车转向,从而使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹的目的。
关键词:循迹小车,STC89C52,红外光电传感器ABSTRACTThe design is a simple automatically tracing the car system, and its significance covers the industry, life, exploration, and human concern lunar exploration. The design aims to design a can of independent walking in accordance with the trajectory of human default (or completely autonomous walking) and to complete the tasks assigned to the car. The design includes control system hardware and software design. Relatively high stability of the four trusses in order to adapt to the complex terrain, before the rotation of the rear-wheel drive control mode. Control system to control the core to STC89C52 microcontroller PWM wave to control the car speed. Using infrared photoelectric sensor to detect the black track on the road and to determine the current status of the car, and then the road detection signal is fed to the microcontroller. Microcontroller to be collected signal analysis and judgment, and timely control of the drive motor to adjust the steering of the car, so that the car is traveling along the black track to achieve the purpose of the car automatically tracing.Keywords:car tracking;STC89C52;Infrared sensors目录1. 绪论 (1)1.1循迹小车概述 (1)1.1.1循迹小车的发展历程 (1)1.1.2循迹小车的应用 (2)1.2智能循迹小车的关键技术 (2)2. 方案的设计与论证 (4)2.1主控系统 (4)2.2驱动模块 (4)2.3循迹模块 (5)2.4机械系统 (5)3. 主要器件介绍 (6)3.1单片机STC89C52的介绍 (6)3.2电机介绍 (8)3.3电机驱动模块L298N的介绍 (8)3.3.1L298N的引脚功能 (9)3.3.2L298N的工作参数 (10)3.3.3L298N的逻辑控制 (10)3.4TCRT5000的介绍 (11)3.5LM324的介绍 (11)4. 硬件系统设计 (13)4.1总体设计 (13)4.2主控电路 (13)4.2.1外部时钟电路 (14)4.2.2复位电路 (14)4.2.3P0口外接上拉电阻 (15)4.3轨迹识别电路 (15)4.4电压比较电路 (16)4.5直流电机驱动电路 (17)5. 程序设计 (18)5.1程序总体框架 (18)5.2主程序模块 (20)5.3循迹程序模块 (21)5.4电机程序模块 (22)5.5定时器程序模块 (24)结论 (26)致谢 ............................................................................................... 错误!未定义书签。
基于Arduino控制的四驱智能循迹小车设计

• 124•利用电磁信号传感模块获取路径信息,并传送给开源硬件Arduino作为反馈信号,用于驱动左右双路直流电机以不同转速旋转,以转速差控制小车运动姿态并实现循迹行驶。
本设计使用Arduino 集成开发环境简化了程序代码,采用四轮全驱差速转向的形式简化了机械结构,运用模块化连接简化了电路,能够激发使用者学习编程语言的兴趣,并培养良好的实践动手能力。
编程控制技术使用场景非常丰富,但学习过程往往比较枯燥。
为了激发编程语言学习兴趣,拟设计一款竞速小车作为学习载体来进行Arduino 编程控制技术相关知识的学习。
1.整体设计Arduino UNO 控制板控制电机驱动模块,带动电机转动,使小车开始行驶。
而电磁循迹模块将感应路面上的电磁信号,传输到Arduino UNO 控制板来控制小车循迹,同时红外避障模块感应到前方有障碍物时,会传输信号给Arduino 控制小车停下,小车电机将停止转动。
降压模块则是给电池降压保护Arduino UNO 控制板。
系统结构框图如图1所示。
图1 系统结构框图2.硬件设计2.1 结构设计小车主要由Arduino UNO 控制板,微型直流减速电机,铝合金板,轮胎,直流电机驱动模块,E18-D80NK 红外避障模块,降压模块,10mH 工字电磁传感器,12.6V 电池,开关以及杜邦线等部件组成,其结构设计如图2所示。
图2 循迹小车结构设计图使用Arduino UNO 板为整个智能车控制系统的核心,通过杜邦线与各传感器连接,主要负责接收电磁传感器和红外避障模块传输来的信号,根据各传感器传送回来信号进行处理分析。
安装在小车左侧。
使用200*150*3mm 的铝合金板作为底盘支架,并将四个轮子和电机安装在两侧。
每个车轮由单独一个直流减速电机驱动,每个驱动电机外径25mm ,额定功率约7w ,减速比1:20,转速约980rpm 。
通过单独控制左右两侧电机的转速实现直行或转向。
驱动电机安装在铝板下方,通过连轴器与轮胎相连。
毕业设计基于Arduino单片机的智能小车设计
江海职业技术学院毕业设计毕业设计题目:姓名学号:所在系(部):专业及班级:指导教师:完成日期:中文摘要智能车辆是集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,是智能交通系统的一个重要组成部分。
它在军事、民用、太空开发等领域有着广泛的应用前景。
随着电子工业的发展,智能技术广泛运用于各种领域,运用于智能家居中的产品更是越来越受到人们的青睐。
本系统在硬件设计方面,以Arduino单片机为控制核心,以超声波传感器检测前方障碍物,从而自动避障。
在软件方面,利用C语言进行编程,通过软件编程来控制小车运转。
根据家庭各种房间家具的布局不同而使用不同的路径,从而使得家居中常用到的智能清扫小车智能化,人性化。
该小车能自动避障,有一定的实用价值。
关键词:单片机;智能清扫小车;自动避障目录第一章绪论 (1)1.1 选题背景 (1)1.2 智能小车研究现状 (2)1.3 课题主要内容 (4)第二章智能小车总体结构 (5)2.1 方案综述 (5)2.2 主控单元方案比较与选择 (5)2.3 避障单元方案比较与选择 (6)2.4 “小车”的必要的信息 (7)第三章智能小车的触觉、眼睛 (8)3.1 智能小车内部检测原理 (8)3.2 电机电流、电压检测 (10)3.3 超声波测距 (11)第四章智能小车的脚 (23)4.1 轮系结构详述 (23)4.2 直流电机 H 桥驱动电路 (26)4.3 电机控制信号 (28)第五章智能小车的大脑 (29)5.1 Arduino单片机简介 (29)5.2 Arduino单片机引脚简介 (30)5.3 Arduino编程软件 (33)第六章智能小车控制流程及程序 (35)6.1 控制流程 (35)参考文献 (36)致谢 (37)第一章绪论随着科技进步,现代工业技术发展越来越体现出机电一体化的特征。
无论是在金属加工、汽车技术、工业生产等等方面,机器设备表现了所谓智能化、集成化、小型化、高精度化的发展趋势。
基于Arduino智能循迹车设计(毕业设计PPT)
学
生: 指导老师: 学号: 专业:
目录
• 论文绪论 • 研究方法 • 内容阐述 • 研究成果 • 发展建议
论文绪论
• 欧美日在智能领域已经取得了诸多成果。 • 美国AGVS(自动导向搬运车系统)
牵引式搬运车
• 日本Dead Reckoning System
• 分别利用旋转编码器和电位计来获取智能 小车的转向角,从而完成了智能小车的定 位。
智 能 循 迹 车 程 序 流 程 图
循迹传感器
传感器电路图
循迹程序编译
电机的驱动芯片
电机的驱动电路
超声波传感器检测障碍
•蜂鸣器的种类
蜂鸣器程序编译
LCD1602显示
LCD1602程序程序流程图
LCD1602程序编译
研究成果
• 在Arduino的编译支持下,对大部分的程序 进行了编译,达到了预期的目的,将所有 程序上传至相应的设备,就能实现智能循 迹车循迹。
• 国内各大高校和汽车企业都展开合作,取 得不俗成绩,中国一汽和国防科技大学研 究的自动驾驶轿车达到世界领先水平。
研究方法
• 本论文主要是通过查阅大量的资料文献来 对智能循迹车来进行系统设计,并且通过 编译软件对程序进行编译,以达到功能实 现的目的。
内容阐述
• 在事先设置的黑色轨迹线的基础上,让智 能循迹车利用灰度传感器依照黑色的轨迹 线行驶,并将智能车的速度、路程实时通 过LCD1602显示出来,假如前方有障碍,通 过蜂鸣器进行预警。
发展建议
• 智能循迹车安装上可以旋转的摄像头和相 应的视频数据传输装置,并且搭载语音装 置可以进行简单的人机对话。
谢谢
循迹小车毕业设计
摘要本设计是一种基于传感器和单片机的数据采集系统,用于实现智能小车的自主循迹功能。
采用反射式红外传感器来识别白色路面中央的黑色导引线,输出相应模拟电压信号,通过信号处理电路将模拟信号转化为可供单片机识别的数字信号;采用反射式激光传感器来判断小车前方一定距离处是直道还是弯道,并直接输出相应的数字信号;采用STC89C52RC单片机作为主控器,对采集到的信号予以分析判断,并控制小车产生相应的动作。
经过总体方案设计、硬件选择、程序编写以及实际调试后,最终的测试结果表明,该数据采集系统工作稳定,算法可靠。
关键词:数据采集系统;传感器;单片机;循迹AbstractThis design is a data acquisition system based on sensors and Single-Chip Microcomputer, it is used to realize the function of tracking line for the intelligent vehicle. The reflecting infra-red sensors are used to identify the black guiding line in the center of the white road, they output corresponding analog voltage signals which will be transformed into digital signals by the signal processing circuit, then the Single-Chip Microcomputer can read the digital signals. The reflecting laser sensor is used to judge that if the road in front of the car is curve or straight, it outputs a corresponding digital signal. The Single-Chip Microcomputer STC89C52RC is used to analyze the signals acquired and control the intelligent vehicle to move accordingly.After designing the overall solutions, choosing the hardware devices, writing the program, and the actual debugging, the final testing result shows that the system works stably and the program runs reliably.Key words: data acquisition system; sensor; Single-Chip Microcomputer; tracking line目录摘要 (I)Abstract....................................................................................................................................... I I 1绪论 . (1)1.1选题的背景和意义 (1)1.2发展现状与趋势 (1)1.3本论文主要研究内容 (2)2 总体方案 (3)2.1 底盘的选择 (3)2.2 智能车整体模块设计 (5)2.3 信息采集模块设计 (5)2.3.1 如何判断车头位置 (6)2.3.2 如何判断弯道直道 (8)2.3.3 如何判断十字路口 (9)3 硬件设计 (10)3.1 传感器的选择及改进 (10)3.1.1 四路红外传感器 (10)3.1.2 一路激光传感器 (13)3.2 信号处理电路的设计 (14)3.3 单片机最小系统设计 (17)3.3.1 供电电路 (17)3.3.2 振荡电路 (18)3.3.3 复位电路 (19)3.4 硬件的安装 (19)4 软件设计 (22)4.1 主函数流程 (22)4.2 循迹流程 (23)4.3 调速流程 (24)4.4 程序的烧录 (24)4.4.1 程序烧录的前提 (25)4.4.2 烧录步骤 (25)5 系统调试与改进 (27)5.1 车模测试 (27)5.2 激光传感器测试 (27)5.3 红外传感器测试 (28)5.4 简单循迹测试 (29)5.5 调速循迹测试 (29)5.6 最终循迹测试 (29)6 结论 (31)致谢 (32)参考文献 (33)附录A 英文原文 (34)附录B 中文翻译 (38)附录C 测试程序 (46)C.1 车模测试程序 (46)C.2 激光传感器测试程序 (47)C.3 循迹测试程序 (48)C.3.1 简单循迹测试程序 (48)C.3.2 调速循迹测试程序 (50)C.3.3 最终循迹测试程序 (53)附录D 跑道 (59)D.1 跑道A (59)D.2 跑道B (59)1绪论1.1选题的背景和意义智能车在生活中有着广泛的应用,例如自动化生产线上的物料陪送机器人,医院的机器人护士,商场的导游机器人等[1]。
循迹小车 毕业论文
摘要本设计是一种基于单片机控制的简易自动寻迹小车系统,其研究意义涵盖了工业、生活、勘探以及人类关注的探月工程。
设计旨在设计出一款可以自主按照人类预设的轨迹行走(或者完全自主行走)并完成指定任务的小车。
从设计的功能要求出发,设计包括小车机械构成设计和控制系统的软硬件设计。
为了适应复杂的地形我采用稳定性比较高的四轮构架式,用后轮驱动前轮换向的控制模式。
控制系统以STC89C52为控制核心, 用单片机产生PWM波,控制小车速度。
利用红外光电传感器对路面黑色轨迹进行检测,并确定小车当前的位置状态,再将路面检测信号反馈给单片机。
单片机对采集到的信号予以分析判断,及时控制驱动电机以调整小车转向,从而使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹的目的。
关键词:循迹小车,单片机,红外传感器ABSTRACTThe design is a simple microcontroller-based control automatically tracing the car system, and its significance covers the industry, life, exploration, and human concern lunar exploration. The design aims to design a can of independent walking in accordance with the trajectory of human default (or completely autonomous walking) and to complete the tasks assigned to the car. The design includes the functional requirements from the design of car mechanical design and control system hardware and software design. Relatively high stability of the four trusses in order to adapt to the complex terrain, before the rotation of the rear-wheel drive control mode. Control system to control the core to STC89C52 microcontroller PWM wave to control the car speed. Using infrared photoelectric sensor to detect the black track on the road and to determine the current status of the car, and then the road detection signal is fed to the microcontroller. Microcontroller to be collected signal analysis and judgment, and timely control of the drive motor to adjust the steering of the car, so that the car is traveling along the black track to achieve the purpose of the car automatically tracing.Keywords:car tracking;microcontroller;Infrared sensors目录1 绪论 (1)1.1 研究背景和发展现状 (1)1.2 研究目的和意义 (1)1.3 研究内容 (2)2方案设计与论证 (3)2.1 总体方案设计 (3)2.2主控系统 (3)2.2 电机驱动模块 (4)2.3 驱动电机选择 (5)2.4 循迹模块 (5)2.5 机械系统 (6)3 主要器件介绍 (7)3.1 STC89C52的介绍 (7)3.2 L298N的介绍 (10)3.2.1 L298的引脚功能 (10)3.2.2 L298的运行参数 (11)3.2.3 L298的逻辑控制 (11)3.3 TCRT5000的介绍 (11)3.4 LM324的介绍 (12)4 硬件设计 (14)4.1总体设计 (14)4.2 STC89C52单片机控制电路 (16)4.2.1 时钟电路 (16)4.2.2 复位电路 (17)4.2.3 EA/VPP(31 脚)的功能和接法 (17)4.2.4 P0 口外接上拉电阻 (17)4.3TCRT5000黑色轨迹识别电路 (18)4.4LM324电压比较电路 (19)4.5电机驱动电路 (20)4.5.1驱动电路 (20)4.5.2 PWM调速原理 (21)5程序设计 (23)5.1主程序 (23)5.2TCRT5000扫描程序 (25)5.3 PWM编码产生程序 (26)6调试 (28)6.1硬件调试 (28)6.1.1电池可靠性 (28)6.1.2TCRT5000探头 (29)6.1.3 L298N马达驱动模块 (29)6.2软件调试 (29)6.2.1调试平台介绍 (29)6.3 测试结果与分析 (30)结束语 (32)参考文献 (33)致谢 (34)附录 (35)附录1:源程序 (35)附录2:原理图 (39)附录3:PCB设计 (40)1 绪论1.1 研究背景和发展现状随着电子技术、计算机技术、智能控制技术的飞速发展,产品的智能化和小型化越来越成为人们关注的热点。
循迹小车报告精选全文完整版
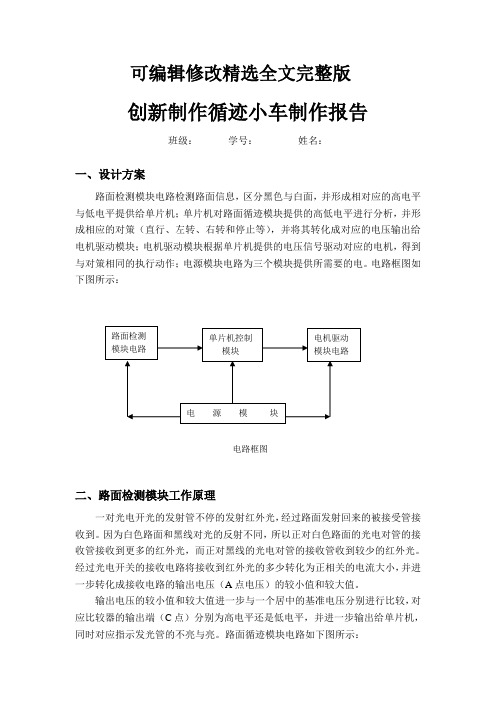
可编辑修改精选全文完整版创新制作循迹小车制作报告班级:学号:姓名:一、设计方案路面检测模块电路检测路面信息,区分黑色与白面,并形成相对应的高电平与低电平提供给单片机;单片机对路面循迹模块提供的高低电平进行分析,并形成相应的对策(直行、左转、右转和停止等),并将其转化成对应的电压输出给电机驱动模块;电机驱动模块根据单片机提供的电压信号驱动对应的电机,得到与对策相同的执行动作;电源模块电路为三个模块提供所需要的电。
电路框图如下图所示:电路框图二、路面检测模块工作原理一对光电开光的发射管不停的发射红外光,经过路面发射回来的被接受管接收到。
因为白色路面和黑线对光的反射不同,所以正对白色路面的光电对管的接收管接收到更多的红外光,而正对黑线的光电对管的接收管收到较少的红外光。
经过光电开关的接收电路将接收到红外光的多少转化为正相关的电流大小,并进一步转化成接收电路的输出电压(A点电压)的较小值和较大值。
输出电压的较小值和较大值进一步与一个居中的基准电压分别进行比较,对应比较器的输出端(C点)分别为高电平还是低电平,并进一步输出给单片机,同时对应指示发光管的不亮与亮。
路面循迹模块电路如下图所示:D1路面循迹模块电路三、单片机最小系统单片机最小系统包括了时钟电路和复位电路。
时钟电路为单片机工作提供基本时钟,复位电路用于将单片机内部各电路的状态恢复到初始值。
单片机是一个复杂的同步时序电路,为了保证同步工作方式的实现,电路应在唯一的时钟信号下严格地按时序进行工作。
时钟电路用于产生单片机工作所需要的时钟信号。
时钟信号的产生是在MCS-51系列单片机内部有一个高增益反相放大器,其输入端引脚为XTAL1,其输出端引脚为XTAL2。
只要在XTAL1和XTAL2之间跨接晶体振荡器和微调电容,就可以构成一个稳定的自己振荡器。
复位电路由一个按键、电解电容和电阻组成,它是使CPU 和系统中的其他功能部件都恢复到一个确定的初始状态,并从这个状态开始工作。
智能循迹避障声控小车设计__毕业设计
智能循迹避障声控小车设计__毕业设计毕业设计报告摘要:本文主要介绍了一种智能循迹避障声控小车的设计方案。
该小车通过声音的控制实现前进、后退、转向等操作,并能够通过红外线传感器实时地检测到前方的障碍物,并做出相应的避障操作。
此外,小车还具备循迹功能,能够通过线性二分法实现按照指定的线路行进。
整个系统的设计基于Arduino控制平台和相关的传感器模块,通过编程实现各功能的控制和算法的运行。
实验结果表明,该小车能够稳定地完成循迹避障和声控的功能,具有较高的可靠性和灵活性。
关键词:智能小车,循迹,避障,声控,Arduino一、引言随着计算机技术和电子技术的发展,智能小车成为了人们关注的焦点之一、智能小车运用到了很多新的技术,如声控、避障、循迹等,为人们的生活带来了很多便利。
基于此,本文设计了一种智能循迹避障声控小车,通过声音的控制和红外线传感器的检测,实现了小车的前进、后退、转向、避障等功能,并通过循迹实现了指定线路的行进。
二、设计方案2.1硬件设计本设计使用Arduino控制平台作为主控制器,通过连接相关的传感器模块实现各个功能的控制和检测。
具体的硬件设计如下:1)Arduino主控制器:作为整个系统的核心,负责接收声音控制和传感器信号,控制电机进行驱动。
2)声音传感器:通过检测声音的强度和频率,判断用户的操作指令,并将指令传递给Arduino主控制器。
3)红外线传感器:安装在小车前方,实时检测到前方的障碍物并发出信号,通知Arduino主控制器避障。
4)电机驱动模块:负责驱动小车的电机进行前进、后退、转向等操作。
2.2软件设计软件设计主要基于Arduino编程语言,实现各功能的控制和算法的运行。
具体的软件设计如下:1)声控部分:通过编写声音控制的代码,实时接收声音传感器的声音强度和频率,并根据预设的阈值匹配相应的操作指令,将指令传递给电机驱动模块进行实际操作。
2)避障部分:通过编写红外线传感器的代码,实时检测到前方的障碍物,并根据检测结果进行相应的避障操作,如后退、转向等。
循迹小车毕业设计论文
毕业设计(论文)题目寻迹小车的设计与制作学生姓名院系信息工程系专业************班级*** **学号****************指导教师*****完成时间**********寻迹小车的设计与制作摘要寻迹智能小车生动有趣具有结构简单、原理清晰、趣味性强等特点。
还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,通过动手实践能大大提高解决实际问题的能力,制作完成后的产品,能沿预定的轨道自动前进,生动、有趣,深受初学者喜爱。
而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。
关键字:寻迹/智能/小车目录1寻迹小车的介绍1.1 寻迹小车的功能简介 (1)2 寻迹小车的工作原理2.1 寻迹小车元件 (2)2.2 寻迹小车原理图 (3)2.3 LM393方框图 (3)2.4 寻迹小车工作原理 (4)3 焊接与调试3.1 焊接过程简介 (5)3.2 调试与组装 (5)3.3 整车调试 (6)4 特色与创新点讨论 (6)参考文献 (7)1寻迹小车的介绍1.1 寻迹小车的功能简介在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用白色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
2 寻迹小车的工作原理2.1 寻迹小车元件2.2 寻迹小车原理图2.3 LM393方框图2.4 寻迹小车工作原理首先我们来熟悉一下整机的工作原理图,电路由线路检测电路、电压比较电路、驱动电路和执行电路组成.LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。
基于Arduino单片机的智能小车设计毕业论文

基于Arduino单片机的智能小车设计毕业论文目录第一章绪论 (1)1.1 选题背景 (1)1.2 智能小车研究现状 (2)1.3 课题主要容 (4)第二章智能小车总体结构 (5)2.1 方案综述 (5)2.2 主控单元方案比较与选择 (5)2.3 避障单元方案比较与选择 (6)2.4 “小车”的必要的信息 (7)第三章智能小车的触觉、眼睛 (8)3.1 智能小车部检测原理 (8)3.2 电机电流、电压检测 (10)3.3 超声波测距 (11)第四章智能小车的脚 (23)4.1 轮系结构详述 (23)4.2 直流电机 H 桥驱动电路 (26)4.3 电机控制信号 (28)第五章智能小车的大脑 (29)5.1 Arduino单片机简介 (29)5.2 Arduino单片机引脚简介 (30)5.3 Arduino编程软件 (33)第六章智能小车控制流程及程序 (35)6.1 控制流程 (35)参考文献 (36)致谢 (37)第一章绪论随着科技进步,现代工业技术发展越来越体现出机电一体化的特征。
无论是在金属加工、汽车技术、工业生产等等方面,机器设备表现了所谓智能化、集成化、小型化、高精度化的发展趋势。
1.1 选题背景随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
全国电子大赛和省电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究。
可见其研究意义很大。
本设计就是在这样的背景下提出的,指导教师已经有充分的准备。
本题目是结合科研项目而确定的设计类课题。
设计的智能电动小车应该能够实现适应能力,能自动避障,可以智能规划路径。
智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制器速度。
常见的模型小车,都属于这类遥控车;智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预。
毕业论文《自动循迹小车》【范本模板】
毕业论文(设计)题目自动循迹小车院系电气与电子信息工程学院专业自动化年级 2013级学生姓名赖德鹏学号 130650108田巧玉自动循迹小车专业自动化学生赖德鹏指导教师田巧玉【摘要】本设计以LDC1000传感器探测金属为基础,以单片机控制技术为核心,实现小车自动探测金属轨道并正常行驶。
同时加入前进距离和时间的记录,用户可通过单片机STC15F2K60S2控制传感器根据不同的金属轨道进行参数矫正.小车使用了L298N电机驱动以便于小车可以不通的速度匀速稳定的前进,最终实现集金属探测,实地矫正,参数的设定与数据显示于一身的智能循迹小车。
此设计有体积小,功耗低,适用范围广,用户操作界面设计人性化等特点.【关键词】金属探测参数可调多功能显示智能控制Automatic Vehicle Tracking【Abstract】This design is based on the LDC1000 sensor to detect the metal, with the single-chip microcomputer control technology as the core, to realize the automatic detection of the metal track and normal driving. At the same time to join the advance distance and time records,the user can be controlled by a single chip microcomputer STC15F2K60S2 sensor based on different metal track parameters. The car uses a L298N motor drive for the car can get stable speed constant progress,and ultimately set the metal detection,field correction,intelligent vehicle tracking and data set parameters are displayed in a. This design has the characteristics of small size,low power consumption,wide application range,user-friendly design of user interface,and so on.【Key words】Metal detection adjustable parameters multifunction display intelligent control目录绪论........................................................ 错误!未定义书签。
循迹小车设计毕业设计

4、研究方法的科学性;技术线路的可行性;设计方案的合理性
□ 优 □ 良 □ 中 □ 及格 □ 不及格
5、完成毕业论文(设计)期间的出勤情况
□ 优 □ 良 □ 中 □ 及格 □ 不及格
二、论文(设计)质量
1、论文(设计)的整体结构是否符合撰写规范?
□ 优 □ 良 □ 中 □ 及格 □ 不及格
第一阶段的循迹小车是没有传感器,只采用了简单的开关来控制,可以通过编程设置小车的运动参数和路径,但是这阶段的小车在工作过程中,不能够根据工作场地的变化而改变自身的行进轨迹。
第二阶段的循迹小车支持离线编程并且具有检测并适应场地的能力,这类的循迹小车装备了一些简单的传感器,可以通过传感器知道自身所处的位置、速度等一些物理量。其电路系统闭环控制系统,能够较好的适应场地的变化。
循迹小车还有另一个很鲜明的特点,那就是智能化和自动化,工业使用的智能循迹小车能够根据仓库存储货位情况以及生产流程的一些情况灵活的改变行走路径,而且与传统的运输带和运送线相比改变路径的费用要明显低很多,降低了企业的成本。此外工业使用的智能循迹小车一般都装备有装卸机构,其能实现的功能更多,能与其它的物流设备自动的对接,实现全自动化的物品装卸以及搬运。此外由于工业使用的智能小车的动力是由蓄电池提供的,其使用的能源是无污染的电能,且小车行进过程中基本没有噪音,可以在环境清洁的场地工作。
3、论文(设计说明书)所体现的整体水平
□ 优 □ 良 □ 中 □ 及格 □ 不及格
建议成绩:□优□良□中□及格□不及格
(在所选等级前的□内画“√”)
指导教师:(签名)单位:(盖章)
年 月 日
评阅教师评阅书
评阅教师评价:
一、论文(设计)质量
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目 录摘要 (2)引 言 ......................................................... 2 1 Arduino 智能小车设计方案与参数 (3)1.1 Arduino 智能小车设计方案简介 (3)1.1.1 功能要求 (3)1.1.2 基本原理 (3)1.2 循迹小车参数 (4)2 Arduino 与51单片机的区别 (5)2.1 Arduino 单片机 (5)2.1.1 Arduino 单片机的介绍 .................................. 5 2.1.2 Arduino 单片机的特色 .................................. 5 2.1.3 Arduino 单片机的功能 .................................. 5 2.2 51单片机 .. (6)2.2.1 51单片机的介绍 ....................................... 6 2.2.2 51单片机的功能 ....................................... 6 2.3 Arduino 比51更好的地方 (7)3 循迹小车设计 ...........................3.1 硬件设计 .........................3.1.1 单片机最小系统 .................3.1.2 灰度传感器模块 .................3.1.3 电机驱动电路 ...................3.2 软件设计 .........................3.2.1 系统主程序 .....................3.2.2 本系统编译器 ...................3.3 实物展示 .........................3.4 部分程序展示 .....................结 论 ...................................致 谢 ...................................参考文献 ................................. Arduino 循迹小车设计与实现摘要:循迹小车是Arduino 单片机的一种典型应用。
本智能小车是由ardiuno 单片机和外部电路组成,包括检测模块,控制模块,电源模块。
循迹车设计采用Arduino单片机作为小车的控制核心,采用灰度传感器作为小车的检测模块来识别绿色路面中央的黑色引导线,采集信号并将信号转换为能被ardiuno单片机识别的数字信号;采用驱动芯片L298N构成双H桥控制直流电机。
其中软件系统采用C程序。
关键词:Arduino单片机,自动循迹,驱动电路。
引言自第一台工业机器人诞生以来,机器人的民展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人工作的机器一直是人类的目标。
单片机是一种可通过编程控制的微处理器,虽其自身不能单独用在某项工程或产品上,但当其与外围数字器件和模拟器件结合时便可发挥强大的功能,现在单片机已广泛应用于众多领域。
例如:工业自动化,智能仪器仪表,消费类电子产品,通信方面,武器装备等。
作为与自动化技术和电子密切相关的理工科学生,掌握单片机是最基础的要求。
为进一步丰富和巩固单片机知识,也为能更好的联系实际应用,本次毕业设计选择了基于单片机Arduino循迹车,并做出实物。
鉴于电子技术、计算机技术以及各种更先进的仿真软件的出现,使用高级语言如C代替汇编语言进行编程和控制已成为现实,单片机C语言编程相对于MC51汇编语言编程有如下优点:对单片机的指令系统不需要有很深的理解就可以编程操作单片机。
寄存器分配、不同存储器的寻址及数据类型等细节完全由编辑器自动处理。
程序有规范的结构,可分为不同的函数,可使程序结构化。
库中包括许多标准子程序,具有较强的处理能力,使用方便。
具有方便的模块化编程技术,使已编好的程序便于移植,可极大缩短开发时间,增加程序的可读性和可维护性。
事实上,当今许多硬件的开发都已开始用C语言编程,如各种单片机、DSP、ARM等,用C语言进行工业控制也已成为一种趋势,为了更好的适应当今社会形势,为了更好的面对挑战、把握机遇,此次毕业设计决定尝试用C语言编程完成。
也希望能在进一步熟悉单片机控制的同时,对数字电子技术、模拟电子技术、计算控制技术以及常用外围芯片有更深层次的了解,提高自己的综合能力。
1 Arduino智能小车设计方案与参数根据设计要求,Arduino智能小车要沿着山道环山跑一圈。
Arduino智能小车主要由四部分组成:分别为大脑-微控制器Arduino、眼睛-灰度传感器、躯体-电机驱动模块和心脏-电源模块。
1.1 Arduino智能小车方案简介依据所需功能的要求,设计计价器系统的结构图和硬件电路,绘制出智能小车的电路图,再绘制程序框图,之后编程并烧录到单片机;将各模块组合进行调试。
1.1.1功能要求小车以Arduino 为控制核心, 用单片机产生PWM波,控制小车速度。
利用灰度传感器对路面黑色轨迹进行检测,并将路面检测信号反馈给单片机内。
单片机对采集到的信号予以分析判断,及时控制驱动电机以调整小车转向,从而使小车能够沿着黑色轨迹自动行驶,实现小车自动寻迹的目的。
1.1.2基本原理智能小车系统主要由四部分组成:大脑-微控制器Arduino、眼睛-灰度传感器、手脚-电机驱动模块、能源-电源模块, 智能车循迹行驶过程是:首先灰度传感器将检测到黑线的信号传送给单片机最小系统,然后通过单片机最小系统的控制算法对信号进行计算处理,将此信号在通过控制算法驱动电机,最后实现对智能车运动轨迹进行实时控制。
微控制器-Arduino为内部核心处理处理单元,将外部给予的电平信号通过以植入的c语言程序为主进行处理。
灰度传感器为智能小车的眼睛,通过辨别地面的黑色线条的物理信号,灰度再将之转换为单片机能够处理的电平信号。
单片机将信号传输给电机驱动模块,即我们小车结构的手脚接受指令运行。
智能车总体模块设计图如图1-1所示。
它适用于爱好"互动"介面版,并且具、C语言的开发环境。
个主要的部分:硬来做电路连接的;另外一个则是的计算机中的程IDE中编写ArduinoArduino微处理控制器 (AVR系列控制器),可以采用USB接口供电,不需外接电源,也可以使用外部9VDC输入。
Arduino支持ISP在线烧,可以将新的"bootloader"固件烧入AVR芯片。
有了bootloader之后,可以通过串口或者USB to RS232线更新固件。
也可依据官方提供的Eagle格式PCB和SCH电路图简化Arduino模组,完成独立运作的微处理控制;可简单地与传感器,各式各样的电子元件连接(例如:红外线,超音波,热敏电阻,光敏电阻,伺服马达,…等)支持多种互动程序,如:Flash、MaxMsp、vvvv、PD、C、Processing等。
应用方面:利用Arduino,突破以往只能使用鼠标、键盘、CCD等输入的装置的互动内容,可以更简单地达成单人或多人游戏互动。
2.1.3 Arduino单片机的功能在功能上可以快速使用Arduino与Adobe Flash, Processing, MaxMSP, Pure Data, SuperCollider等软件结合,作出互动作品。
Arduino可以使用现有的电子元件例如开关或者传感器或者其他控制器件、LED、步进马达或其他输出装置。
Arduino也可以独立运行,并与软件进行交互,例如: Macromedia Flash, Processing, MaxMSP, Pure Data, VVVV或其他互动软件等。
Arduino 的IDE界面基于开放源代码,可以免费下载使用,开发出更多令人惊艳的互动作品。
在更多功能上有基于知识共享开放元源码的电路图设计,有基于知识共享开放源码的程式开发环境。
Arduino可使用ICSP线上烧入器,将「bootloader」烧入新的IC晶片,可依据官方电路图,简化Arduino模组,完成独立运作的微处理控制,可简单地与传感器,各式各样的电子元件连接(例如:红外线,超声波,热敏电阻,光敏电阻,伺服马达等),USB接口上,不需外接电源。
另外有提供9V直流电源输入。
2.2 51单片机2.2.1 51单片机的介绍51单片机是对所有兼容Intel 8031指令系统的单片机的统称。
该系列单片机的始祖是Intel的8031单片机,后来随着Flash rom技术的发展,8031单片机取得了长足的进展,成为应用最广泛的8位单片机之一,其代表型号是ATMEL公司的AT89系列,它广泛应用于工业测控系统之中。
很多公司都有51系列的兼容机型推出,今后很长的一段时间内将占有大量市场。
51单片机是基础入门的一个单片机,还是应用最广泛的一种。
需要注意的是52系列的单片机一般不具备自编程能力。
2.2.2 51单片机的功能51单片机的功能特点分别有:8位CPU·4kbytes程序存储器(ROM)(52为8K),128bytes的数据存储器(RAM) (52有256bytes的RAM),32条IO口线·111条指令,大部分为单字节指令,21个专用寄存器,2个可编程定时计数器·5个中断源,2个优先级(52有6个),一个全双工串行通信口,外部数据存储器寻址空间为64kB,外部程序存储器寻址空间为64kB,逻辑操作位寻址功能·双列直插40PinDIP封装。
51单片机的内部结构分别为CPU:由运算和控制逻辑组成,同时还包括中断系统和部分外部特殊功能寄存器;RAM:用以存放可以读写的数据,如运算的中间结果、最终结果以及欲显示的数据;ROM:用以存放程序、一些原始数据和表格;IO口:四个8位并行IO口,既可用作输入,也可用作输出;TC:两个定时记数器,既可以工作在定时模式,也可以工作在记数模式;五个中断源的中断控制系统; 一个全双工UART(通用异步接收发送器)的串行IO口,用于实现单片机之间或单片机与微机之间的串行通信;片内振荡器和时钟产生电路,石英晶体和微调电容需要外接。
最佳振荡频率为6M-12M。
2.3 Arduino比51更好的地方Arduino与51单片机相比:变更人性化,编程相对人性化和直观,没有单片机基础的人也能很快上手。