机械轮系计算题
机械原理试题及答案5
第八章轮系一、选择题1.轮系可以分为________两种类型。
A.定轴轮系和差动轮系B.差动轮系和行星轮系C.定轴轮系和复合轮系D.定轴轮系和周转轮系2.差动轮系的自由度为_________。
A.1B.2C.3D.43.行星轮系的自由度为__________。
A.1B.2C.3D.44.在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式是i1n=_________。
A.轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积B.轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积C.轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积D.轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积5.在运用反转法解决周转轮系传动比的计算问题时,下列公式中________是正确的。
A.i H mn=(nm —nH)/(nn—nH) B.i Hmn=(nn—nH)/(nm—nH)C.i Hmn =(nH—nn)/(nm—nn) D.i Hmn=(nm—nn)/(nn—nH)6.基本周转轮系是由________构成。
A.行星轮和中心轮B.行星轮、惰轮和中心轮C.行星轮、行星架和中心轮D.行星轮、惰轮和行星架7.下列四项功能中,哪几项_______可以通过轮系的运用得以实现。
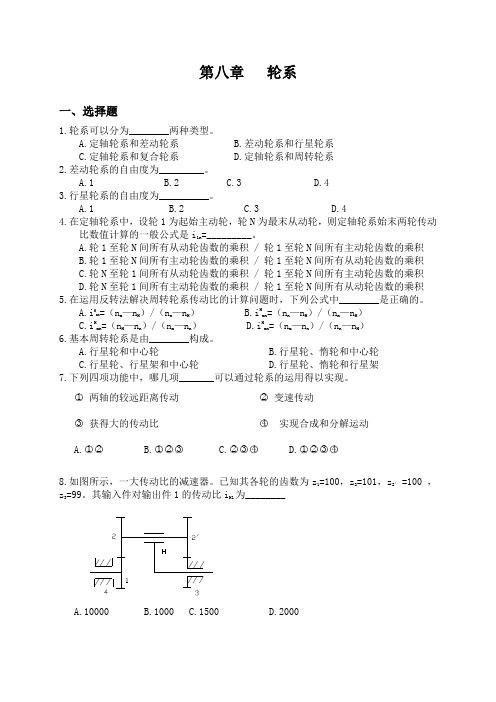
○1两轴的较远距离传动○2变速传动○3获得大的传动比○4实现合成和分解运动A.○1○2B.○1○2○3C.○2○3○4D.○1○2○3○48.如图所示,一大传动比的减速器。
已知其各轮的齿数为z1=100,z2=101,z2’=100 ,z 3=99。
其输入件对输出件1的传动比iH1为________A.10000B.1000C.1500D.2000二、判断题1.定轴轮系的传动比数值上等于组成该轮系各对啮合齿轮传动比的连乘积( )2.周转轮系的传动比等于各对齿轮传动比的连乘积。
机械基础轮系练习题

XXXXX学校《机械基础》练习题一、填空题1.由一系列相互啮合齿轮所构成的传动系统称为_________.2.按照轮系传动时各齿轮的轴线位置是否固定,轮系分为________和________两大类.3.当轮系运转时,所有齿轮几何轴线的位置相对于机架固定不变的轮系称为_______.4.轮系中,既有定轴轮系又有行星轮系的称为________.5.采用行星轮系,可以将两个独立的运动_______为一个运动,或将一个运动_______为两个独立的运动.6.轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用_________的方法表示.7.定轴轮系中的传动比等于_________的转速之比,也等于该轮系中________与_______之比.8.在各齿轮轴线相互平行的轮系中,若齿轮的外啮合对数是偶数,则首轮与末轮的转向_______;若为奇数,则首轮与末轮的转向__________.9.在轮系中,惰轮常用于传动距离稍__________和需要改变________的场合.10.在轮系中,末端件若是齿轮齿条,它可以把主动件的________运动变为齿条的______运动.11.轮系的特点:(1)可获得_________的传动比;(2)可实现__________距离传动;(3)可实现________、________要求;(4)可_________或__________运动.12.平面定轴轮系中传动比计算公式为_________,其中(-1)的n次方,n表示 ________.若(-1) 的n次方为正,则首、末两轮转向____.13.定釉轮系中任一从动件的转速计算公式为______________________.14.定轴轮系末端通常有下列三种传动形式,则末端件的移动速度v(或移动距离L)的计算公式分别为: (1)末端为螺旋传动时:________________ (2)末端为滚动轮传动时:______________ (3)末端为齿轮齿条传动时:_____________二、单选题1.若齿轮与轴之间( ),则齿轮与轴各自转动,互不影响.A.空套 B.固定 c.滑移 D.空间配合2.如图所示的轮系中,设已知Z1= Z2=Z3′=Z4= 20,Z3=Z5= 60,又齿轮1、3、3′与5同轴线,试求传动比i15。
轮系考研真题
8.(山东轻工业学院 2010年) 在如图所示轮系中,已知运动由齿轮 1输入,其转速 n1=3549r/min。z1=36,z2=60,z3=23,z4 =49,z4’ =69,z5=31,z6=131,z7=94,z8=36,z9=167。 (1)分析轮系的组成,划分出各个单一的周转轮系和定轴轮系; (2)求 nH =?
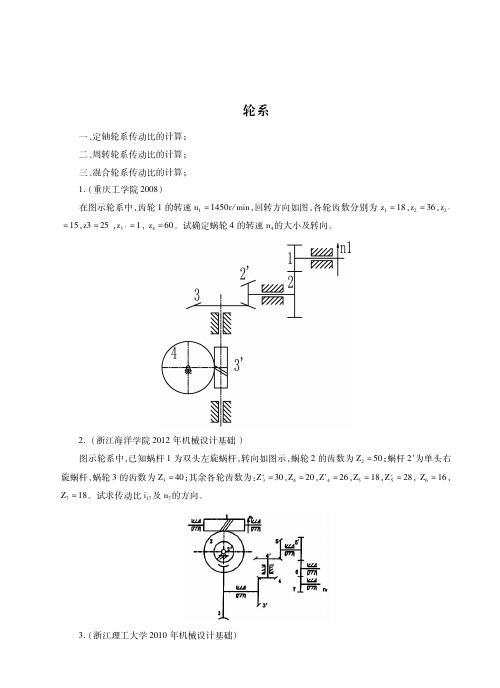
2.(浙江海洋学院 2012年机械设计基础 ) 图示轮系中,已知蜗杆 1为双头左旋蜗杆,转向如图示,蜗轮 2的齿数为 Z2=50;蜗杆 2′为单头右 旋蜗杆,蜗轮 3的齿数为 Z3=40;其余各轮齿数为:Z'3=30,Z4=20,Z′4=26,Z5=18,Z'5=28,Z6=16, Z7=18。试求传动比 i17及 n7的方向。
3.(浙江理工大学 2010年机械设计基础)
在图所示差动轮系中,已知各轮的齿数 z1=30,z2=50,z2′=20,z3=75,齿轮 1的转速为 200r/min (箭头向上),齿轮 3的转速为 50r/min(箭头向下),求行星架转速 nH的大小和方向?
4.(浙江理工大学 2010年机械设计基础) 在图所示的轮系中,已知,z1=z4=40,z2=z5=30,z3=z6=100,的大小和方向。
7.(昆明理工大学 2010年机械原理考研真题) 图示的轮系中,已知各轮齿数为 z1=32,z2=34,z2’ =36,z3=64,z4=32,z5=17,z6=24,若轴 A按 图示方向以 1250r/min的转速回转,轴 B按图示方向以 600r/min的转速回转,试确定轴 C的转速大小 和方向。
9.(深圳大学 2011年机械设计基础)
图示为传动装置。1为单头右旋蜗杆,2为蜗轮,其齿数 z2=100,其余各轮的齿数分别为 z2’ =z4, z6=z8,z4’ =80,z5=20,运动由蜗杆 1和齿轮 5同时输入,由齿轮 6输出,若 n1 =n5 =1000r/min,转向 如图所示,求齿轮 6输出的运动 n6的大小和方向。
(完整版)机械基础轮系练习题

XXXXX 学校《机械根底》练习题一、 填空题1.由一系列相互啮合齿轮所构成的传动系统称为_________.2.按照轮系传动时各齿轮的轴线位置是否固定,轮系分为________和________两大类. 3.当轮系运转时,所有齿轮几何轴线的位置相对于机架固定不变的轮系称为_______. 4.轮系中,既有定轴轮系又有行星轮系的称为________.5.采用行星轮系,可以将两个独立的运动_______为一个运动,或将一个运动_______为两个独立的运动. 6.轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用_________的方法表示.7.定轴轮系中的传动比等于_________的转速之比,也等于该轮系中________与_______之比.8.在各齿轮轴线相互平行的轮系中,假设齿轮的外啮合对数是偶数,那么首轮与末轮的转向_______;假设为奇数,那么首轮与末轮的转向__________.9.在轮系中,惰轮常用于传动距离稍__________和需要改变________的场合.10.在轮系中,末端件假设是齿轮齿条,它可以把主动件的________运动变为齿条的______运动. 11.轮系的特点:(1)可获得_________的传动比;(2)可实现__________距离传动;(3)可实现________、________要求;(4)可_________或__________运动.12.平面定轴轮系中传动比计算公式为_________,其中(-1)的n 次方,n 表示 ________.假设(-1) 的n 次方为正,那么首、末两轮转向____.13.定釉轮系中任一从动件的转速计算公式为______________________.14.定轴轮系末端通常有以下三种传动形式,那么末端件的移动速度v(或移动距离L)的计算公式分别为: (1)末端为螺旋传动时:________________ (2)末端为滚动轮传动时:______________ (3)末端为齿轮齿条传动时:_____________ 二、单项选择题 1.假设齿轮与轴之间( ),那么齿轮与轴各自转动,互不影响. A.空套 B .固定 c .滑移 D .空间配合 2.如下图的轮系中,设Z1= Z2=Z3′=Z4= 20,Z3=Z5= 60,又齿轮1、3、3′ 与5同轴线,试求传动比i15。
机械设计基础_孙立鹏_习题第五章轮系
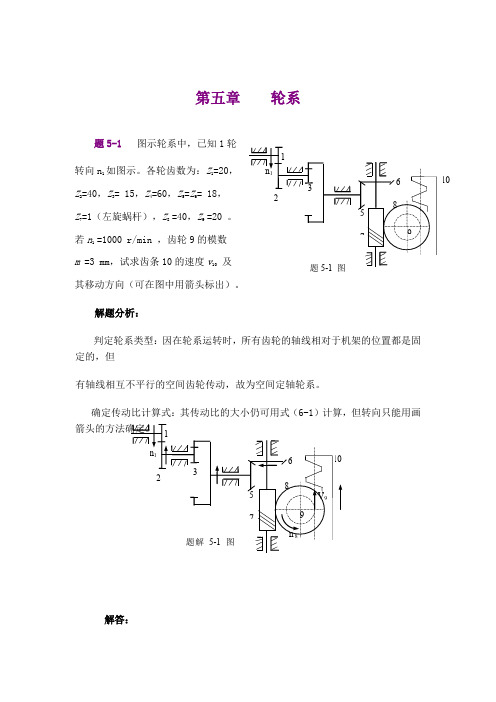
第五章轮系题5-1图示轮系中,已知1轮Array如图示。
各轮齿数为:Z1=20,转向n1Z=40,Z3= 15,Z4=60,Z5=Z6= 18,2Z=1(左旋蜗杆),Z8=40,Z9 =20 。
7若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v及10其移动方向(可在图中用箭头标出)。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画解答:1.确定齿条10的速度v 10 大小∵ 320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1的齿数为Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ;(2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
《机械设计基础》试题库_轮系

第5章 轮系习题与参考答案一、复习思考题1.为什么要应用轮系?试举出几个应用轮系的实例?2.何谓定轴轮系?何谓周转轮系?行星轮系与差动轮系有何区别? 3.什么叫惰轮?它在轮系中有什么作用?4.定轴轮系的传动比如何计算?式中(-1)m 有什么意义? 5.定轴轮系末端的转向怎样判别?6.如果轮系的末端轴是螺旋传动,应如何计算螺母的移动量?二、填空题1.由若干对齿轮组成的齿轮机构称为 。
2.根据轮系中齿轮的几何轴线是否固定,可将轮系分 轮系、 轮系和 轮系三种。
3.对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中 的符号来判定。
4.行星轮系由 、 和 三种基本构件组成。
5.在定轴轮系中,每一个齿轮的回转轴线都是 的。
6.惰轮对 并无映响,但却能改变从动轮的 方向。
7.如果在齿轮传动中,其中有一个齿轮和它的 绕另一个 旋转,则这轮系就叫周转轮系。
8.旋转齿轮的几何轴线位置均 的轮系,称为定轴轮系。
9.轮系中 两轮 之比,称为轮系的传动比。
10.加惰轮的轮系只能改变 的旋转方向,不能改变轮系的 。
11.一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21n n i ——。
12.定轴轮系的传动比,等于组成该轮系的所有 轮齿数连乘积与所有 轮齿数连乘积之比。
13.在周转转系中,凡具有 几何轴线的齿轮,称中心轮,凡具有 几何轴线的齿轮,称为行星轮,支持行星轮并和它一起绕固定几何轴线旋转的构件,称为 。
14.周转轮系中,只有一个 时的轮系称为行星轮系。
15.转系可获得 的传动比,并可作 距离的传动。
16.转系可以实现 要求和 要求。
17.转系可以运动,也可以运动。
18.采用周转轮系可将两个独立运动为一个运动,或将一个独立的运动成两个独立的运动。
19.差动轮系的主要结构特点,是有两个。
20.周转轮系结构尺寸,重量较。
21.周转轮系可获得的传动比和的功率传递。
三、判断题1.转系可分为定轴轮系和周转轮系两种。
机械原理计算题

计算题1、绘出图示破碎机的机构运动简图,计算其机构的自由度。
2、已知一对正确安装的渐开线标准直齿圆柱齿轮传动,其模数m=5mm, 小轮齿数z 1=22,传动比2=i ,齿轮的压力角α=20°,系数1*=a h ,25.0*=c 。
1)确定轮2的齿数z 2和该传动的中心距a ;2)计算小齿轮的分度圆直径、齿顶圆直径和齿根圆直径。
3、图示轮系中,已知各齿轮的齿数z1=z2′=15,z2=45, z3=30, z3′=17,z4=34, 试计算传动比i14 , 并用箭头表示各轮的转向。
4、计算a 、b 两图机构自由度。
5、在图示铰链四杆机构中,已知a=30mm ,b=60mm ,c=40mm ,,d=55mm ,问机构为哪一种机构?6、已知一对正确安装的渐开线标准直齿圆柱齿轮传动,其模数m=5mm, 小轮齿数z 1=22,传动比2=i ,齿轮的压力角α=20°,系数1*=a h ,25.0*=c 。
1)确定轮2的齿数z 2和该传动的中心距a ;2)计算小齿轮的分度圆直径、齿顶圆直径和齿根圆直径。
7、计算图示机构自由度,若有复合铰链、局部自由度及虚约束需指出。
81) 凸轮的基圆半径r b 、升距h ;2) 凸轮由图示位置转过903) 凸轮由图示位置转过909、图示轮系中,已知各轮齿数:Z 1Z 3’=18,Z 4=114。
1) 该轮系属于何种轮系?2) 计算传动比i 1H ,并在图中标出系杆H 的转向。
10、计算a、b机构自由度(若机构中含有复合铰链、虚约束或局部自由度必须明确指出)。
(a) (b)11、图示轮系中,已知,Z1=20,Z2=40,Z3=60,Z5=120。
(10分)1、该轮系为何种轮系?2、传动比i 13=?12、计算图示机构的自由度。
如有复合铰链、局部自由度及虚约束需说明。
13、今测得一标准直齿圆柱齿轮(25.0,1**==c h a )的齿顶圆直径mm d a 208=齿根圆直径mm d f 172=,齿数z=24,试求:(1)该齿轮的全齿高h;(2) 该齿轮的模数m;(3) 该齿轮的分度圆直径d 和分度圆上的齿厚s.14、图示轮系机构中,已知Z1=25,Z2=20,Z2’=25,Z3=20,Z4=100,Z5=20。
机械设计基础试题及解析
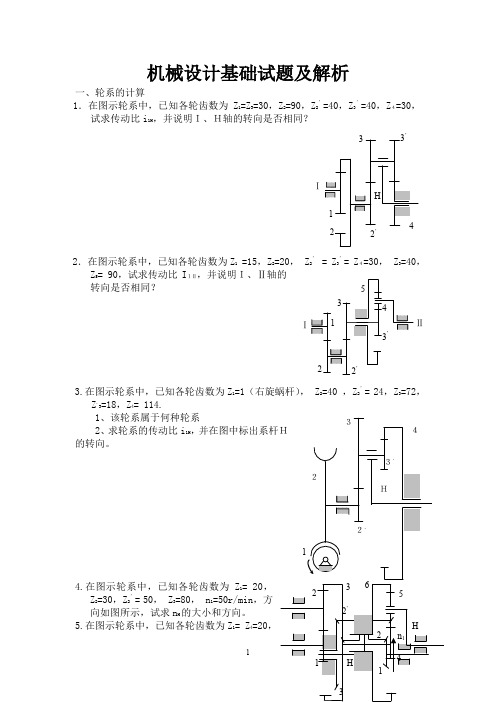
机械设计基础试题及解析一、轮系的计算1.在图示轮系中,已知各轮齿数为Z1=Z3=30,Z2=90,Z2’=40,Z3’=40,Z4=30,试求传动比i1H,并说明I、H轴的转向是否相同?2.在图示轮系中,已知各轮齿数为Z1 =15,Z2=20, Z2’ = Z3’= Z4=30, Z3=40,Z 5= 90,试求传动比IⅠⅡ,并说明I、Ⅱ轴的转向是否相同?3.在图示轮系中,已知各轮齿数为Z1=1(右旋蜗杆), Z2=40 ,Z2’= 24,Z3=72,Z,3=18,Z4= 114.1、该轮系属于何种轮系2、求轮系的传动比i1H,并在图中标出系杆H的转向。
4.在图示轮系中,已知各轮齿数为Z1= 20,Z 2=30,Z2’= 50, Z3=80, n1=50r/min,方向如图所示,试求nH的大小和方向。
5.在图示轮系中,已知各轮齿数为Z1= Z4=20,ⅠⅠⅡZ 2= Z 5=30,Z 3= Z 6=100,试求传动比i 1H 。
6.在图示轮系中,已知各轮齿数为Z 1=100, Z 2=40,Z 2’=30, Z 3=90, Z ,3=50, Z 4=2(右旋), n 1=200r/min ,n 4=1250r/min ,转向如图所示,试求n H的大小及方向。
7.在图示轮系中,已知各轮齿数为Z 1=15, Z 2=25,Z 2’=20, Z 3=20, Z 4=60,Z 4’= 55, n 1=110r/min ,转向如图所示,试求n h 的大小及转向。
8.某起重装置,其运动简图所图所示,已知各轮齿数为Z 1=Z 2=20,Z 3=60,Z 4=2(蜗杆), Z 5=40,n 1的转向如图所示,试求 1、该轮系属于何种轮系? 2、i 15的大小;3、此时重物W是上升还是下落?三、作图题(按作图规则作图,图线清晰) 1.凸轮为一偏心圆盘。
圆盘半径R=25mm 心到圆盘中心的距离l AB =10mm 。
机械原理典型例题(第七章轮系)
z2 z3 n1 nH i 5 n3 nH z1 z2 '
H 13
H
1
1)若n1,n3方向相同 则n1=+200r/min,n3=+50r/min 代入上式得: 200 n H 5 50 n H
n H 75r / min
2)若n1,n3方向相反 则n1=+200r/min,n3=-50r/min 得: 200 n
H i13
n3 nH i n4 nH
H 34
H 31
行星轮 — Z2,Z2’ 联动关系 — n2=n2’ 系杆 — H 中心轮 — 1,3,4 3K-H型周转轮系
n1 nH n 1 1 n3 nH nH z3 = 5 z1
n3 nH z1 1 i = n1 nH z3 5
7-14:图示锥齿轮组成的差速器。已知Z1=48, Z2=42,Z2’=18,Z3=21,n1=100r/min, n3=80r/min,转向如图所示。求nH=?
2 1 2' H 3
H i13
n1 n H z z 49 2 3 z1 z 2 48 n3 n H
转化轮系中 n1与n3相 反
n1 nH 49 n3 nH 48
100 nH 49 80 nH 48
实际方向, n1与n3相反
nH 9.07r / min
1’ 1
n1
定轴: n2和n4’转向相反,n2’和n4转向相反
5’ 5
n Z i12 1 2 n2 Z1 n1Z1 n2 Z2
i1'4'
n1' Z5' Z 4' = n4' Z1' Z5
轮系练习题

第5单元轮系一、单项选择题。
(本大题共20小题,每题2分,共40分)1.由一系列相互啮合的齿轮组成的传动系统称()。
A.轮系B.轮群C.轮合D.轮组2.下列关于轮系说法正确的是()。
A.可以实现运动的合成但不能分解运动B.不适宜作较远距离的传动C.不能获得较大的传动比D.可以实现变向和变速要求。
3.定轴轮系的传动比大小与惰轮的齿数()。
A.有关B.无关C.成正比D.成反比4.定轴轮系中适用(—1)m(m为外啮合次数)决定传动比的正负号的情况是( )。
A.所有齿轮轴线都不平行B.所有齿轮轴线都平行C.首末两轮轴线平行D.所有齿轮都是圆柱齿轮5.定轴轮系中各齿轮的几何轴线位置都是()。
A.固定的B.活动的C.相交的D.交错的6.在由一对外啮合直齿圆柱齿轮组成的传动中,若增加()个惰轮,则使其主、从动轮的转向相反。
A.偶数B.奇数C.二者都是D.二者都不是7.定轴轮系的传动比等于所有()齿数的连乘积与所有主动轮齿数的连乘积之比。
A.从动轮B.主动轮C.惰轮D.齿轮8.定轴轮系的总传动比等于各级传动比()。
A.之和B.连乘积C.之差D.平方和9.惰轮在轮系中,不影响传动比大小,只影响从动轮()。
A.旋转方向B.转速C.传动比D.齿数10.轮系的末端是螺旋传动,已知末端轴转速n=80r/min,三线螺杆的螺距为4mm,则螺母每分钟移动距离为( )mm。
A.240B.320C.960D.120011.用画箭头标注轮系旋转方向的不正确画法是( )。
A.一对外啮合圆柱齿轮箭头方向相反,内啮合箭头方向相同B.同一轴上齿轮箭头画的相反C.圆锥齿轮箭头画相对或相背同一点D.蜗杆传动时,蜗轮转向用左右手定则判别,画出箭头方向12.图示三星轮换向机构中,1为主动轮,4为从动轮,图示传动位置()。
A.一个惰轮,主、从动轮回转方向相反B.一个惰轮,主、从动轮回转方向相同C.两个惰轮,主、从动轮回转方向相同D.两个惰轮,主、从动轮回转方向相反13.一轮系有3对齿轮参加传动,经传动后,则输入轴与输出轴的旋转方向( )。
机械第五章习题
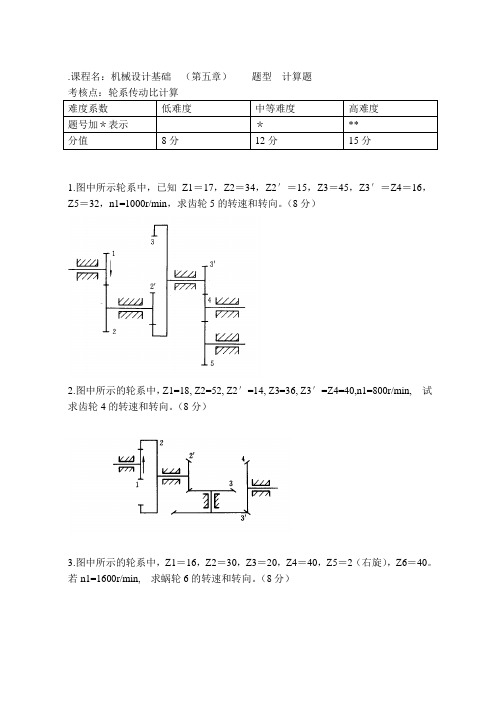
.课程名:机械设计基础(第五章)题型计算题考核点:轮系传动比计算1.图中所示轮系中,已知Z1=17,Z2=34,Z2′=15,Z3=45,Z3′=Z4=16,Z5=32,n1=1000r/min,求齿轮5的转速和转向。
(8分)2.图中所示的轮系中,Z1=18, Z2=52, Z2′=14, Z3=36, Z3′=Z4=40,n1=800r/min,试求齿轮4的转速和转向。
(8分)3.图中所示的轮系中,Z1=16,Z2=30,Z3=20,Z4=40,Z5=2(右旋),Z6=40。
若n1=1600r/min,求蜗轮6的转速和转向。
(8分)5.在图示的轮系中,已知Z1=Z2=Z4=Z5=20,Z3=Z6=60,齿轮1的转速n1=1440r/min,求齿轮6的转速和转向。
(8分)*6.在图示的轮系中,设已知双头右旋蜗杆的转速n1=900r/min,Z2=60,Z2′=25,Z3=20,Z3′=25,Z4=20,Z4′=30,Z5=35,Z5′=28,Z6=135,求轮6的转速和转向。
(12分)*7.在图示的轮系中,已知Z1=15,Z2=25,Z2′=15,Z3=30,Z3′=15,Z4=30,Z4′=2(右旋),Z5=60,Z5′=20,(m=4mm),若n1=1000r/min,求齿轮6的线速度v的大小和方向。
(12分)8.在图示的双级蜗杆传动中,右旋蜗杆1的转向如图,Z1=2,Z2=70,Z2′=2,Z3=60,试求传动比i13和判断蜗轮2和蜗轮3的转向,并以箭头在图中表示。
(8分)*9.图中所示轮系中,已知各标准直齿圆柱齿轮的齿数Z1=Z2=20,Z3′=26,Z4=30,Z4′=20,Z5=39,试计算齿轮3的齿数及传动比i15.(12分)10.图示轮系中,已知Z1=Z2′=15,Z2=45,Z3=30,Z3′=17,Z4=34。
试计算传动比i14及用箭头表示各轮的转向。
(8分)11.图示轮系中,已知Z1=2,Z2′=Z3′=20,Z3=Z4=40,Z2=50,采用右旋蜗杆,若n1=1500r/min,试求轮4的转速和转向。
《机械原理》轮系典型例题

第7章 轮系典型例题一.简答题1.行星轮系齿数与行星轮数的选择必须满足的条件是什么? 答:传动比条件,同心条件,邻接条件,安装条件。
2.为什么要应用轮系?试举出几个应用轮系的例子。
答:一对齿轮难以获得较大的传动比,且不宜实现相距较远的两轴之间的传动,也不能改变从动轮的转向和实现运动的合成与分解等。
如:车床上的三星轮换向机构、汽车后轮传动装置、车床床头箱的调速装置等。
3.计算复合轮系的传动比时,能否对整个轮系加一个()H n -?为什么? 答:因为复合轮系中含有定轴轮系和若干基本周转轮系,由于定轴轮系和周转轮系传动比的计算方法不同,不同基本周转轮系的系杆转速不同,故不能加同一个H n 。
4.周转轮系中1n 与H 1n 的大小和方向是否相同?答:1n 与H1n 的大小不同,方向可能相同也可能不相同。
5.轮系如何分类?周转轮系又可作几种分类?具体如何分法?答:根据轮系在运转过程中各轮几何轴线在空间的相对位置关系是否固定分。
周转轮系分为两类,差动轮系及行星轮系。
具体分法:定轴轮系:轮系运动时,各轮轴线的位置固定不动。
周转轮系:轮系运动时,至少有一个齿轮的轴线是绕其他定轴齿轮的轴线转动。
其中,行星轮系自由度为1,差动轮系自由度为2。
复合轮系 :既有定轴轮系部分又有周转轮系部分、或者由几部分周转轮系所组成的复杂轮系为复合轮系或混合轮系。
二.分析与计算1.在图示轮系中,已知: 1430z z ==, 36100z z ==,1700 r min n =,311331100 2.540z n i n z ==-=-=- (1)由齿轮4、5、6和系杆组成行星轮系,齿轮6固定,60n =。
其转化机构传动比为H64H 4466H H 41001 2.540z n n n i n n n z -==-=-=-=--()H644H 46H 411 2.5 3.5z n i i n z ==-=-=--= (2)由题图可知:34n n =,联立解式(1)、(2)得()11H 344H H2.53.58.75n i i i n ==⋅=-⨯=- 1H 1H 700 r min 80 r min 8.75n n i ∴===--系杆的转向与齿轮1的转向相反。
机械基础轮系试题及答案

机械基础轮系试题及答案一、选择题(每题2分,共10分)1. 轮系中,若主动轮转速为n1,从动轮转速为n2,传动比i为:A. n1/n2B. n2/n1C. n1*n2D. n1-n2答案:B2. 轮系中,若主动轮齿数为Z1,从动轮齿数为Z2,传动比i为:A. Z1/Z2B. Z2/Z1C. Z1*Z2D. Z1-Z2答案:B3. 轮系中,若主动轮直径为D1,从动轮直径为D2,传动比i为:A. D1/D2B. D2/D1C. D1*D2D. D1-D2答案:B4. 轮系中,若主动轮扭矩为T1,从动轮扭矩为T2,传动比i为:A. T1/T2B. T2/T1C. T1*T2D. T1-T2答案:B5. 轮系中,若主动轮功率为P1,从动轮功率为P2,传动比i为:A. P1/P2B. P2/P1C. P1*P2D. P1-P2答案:B二、填空题(每题2分,共10分)1. 轮系中,传动比i的计算公式为_________。
答案:主动轮转速/从动轮转速或主动轮齿数/从动轮齿数或主动轮直径/从动轮直径2. 轮系中,若主动轮转速为n1,从动轮转速为n2,则传动比i=_________。
答案:n1/n23. 轮系中,若主动轮齿数为Z1,从动轮齿数为Z2,则传动比i=_________。
答案:Z1/Z24. 轮系中,若主动轮直径为D1,从动轮直径为D2,则传动比i=_________。
答案:D1/D25. 轮系中,若主动轮扭矩为T1,从动轮扭矩为T2,则传动比i=_________。
答案:T2/T1三、简答题(每题5分,共20分)1. 描述轮系中传动比的物理意义。
答案:传动比表示轮系中主动轮与从动轮转速或齿数或直径的比值,反映了轮系的减速或增速效果。
2. 轮系中,为什么主动轮与从动轮的转速比等于它们的齿数比?答案:因为轮系中齿轮的啮合关系使得主动轮与从动轮的齿数比决定了它们的转速比,即齿数多的轮转速慢,齿数少的轮转速快。
机械轮系计算题

福建专升本复习资料(二)轮系计算1.2.在图示的轮系中,设z1=z2=30,z3=90,试求在同一时间内当构件1和3的转数分别为n1=1,n3=-1(设逆时针为正)时,n H及i1H的值。
3.图示为一电动卷扬机的减速器运动简图,已知各轮齿数,试求:传动比i15。
4.在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:Z1=30,Z2=Z2’=35,Z3=90,Z4=60,求传动比i14。
5.在图示轮系中,已知:Z1=22,Z3=88,Z3’=Z5,试求传动比i15。
6.图示为双螺旋桨飞机的减速器中,已知:Za=26,Zb=66,Zg=20,Za’=30,Zg’=18,Zb’=66,若na=15000rpm时,求np及nQ的大小及转向。
7.图示为一种大速比减速器的示意图,动力由齿轮1处输入,H处输出.已知各轮齿数为:Z1=12,Z2=48, Z3=72,Z2’=48,Z3’=96,Z4=12,试求传动比i1H。
8.如图所示轮系机构中,已知:Z2=Z5=30,Z2’=22.各齿轮模数均相同,试求传动比i54。
9.图示为用于自动化照明灯具上的轮系,已知输入轴转速n1=19.5rpm,各轮的齿数分别为:Z1=60,Z2=Z2’=30,Z3=Z4=40,Z5=120,试求箱体的转速?10.图示的轮系中,已知各轮齿数为Z1=60,Z2=20,Z2’=20,Z3=Z4=20,Z5=100,试求传动比i41?11.在图示的混合轮系中,已知Z1=Z5’=1,Z3=99,Z4’=101,Z2=Z4=Z5=Z6=100,各轮的模数相同,压力角相等.求:1、i162、若w1顺时针方向转动,那么w6的转向如何?3、回归轮系,3-4-4’-5中,为满足同心条件,应采用哪种变位传动方案较好?为什么?若此回归轮系既要满足同心条件,又要保证实现标准齿轮传动应采用什么方法?4、若已知蜗杆1,蜗轮2组成的传动中,它们的模数m=2mm,蜗杆特性系数q=13,那么蜗杆、蜗轮传动的中心距a12=?12.图示轮系中蜗杆1为双头左旋蜗杆Z1=2,转向如图所示。
定轴轮轮系的传动比计算

定轴轮轮系的传动比计算
定轴轮轮系是指两个轮子相隔一定距离,其中一个轮子固定,另一个轮子旋转,采用定轴轮轮系作传动的机械装置。
定轴轮轮系的传动比是指大轮相对小轮的转速比。
定轴轮轮系的传动比计算方法:
1、定轴轮轮系传动比=(大轮转速/小轮转速)=(大轮直径/小轮直径)
2、定轴轮轮系的传动比=(大轮转速/小轮转速)=(大轮齿数/小轮齿数)
3、定轴轮轮系的传动比=(大轮转动角度/小轮转动角度)=(大轮齿数*大轮转动角度/小轮齿数*小轮转动角度)。
机械原理题目---轮系
机械原理题目---轮系(共12页)第六章 轮系及其设计计算及分析题1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。
2、图示轮系,已知各轮齿数Z 1=18,Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。
12 34 5 H3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否和齿轮1相同1I2 2’ 33’4H5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。
6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。
7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求:(1)轮系的传动比i 1H 。
(2)若n 1=1000r/min ,转臂H 的转速n H =8、已知图示轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。
试 求轮3的转速n 3 的大小和转向。
1 2 32’ 3’4 H45 1 23H12 2’34 53’9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。
10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。
《机械设计基础》试题库
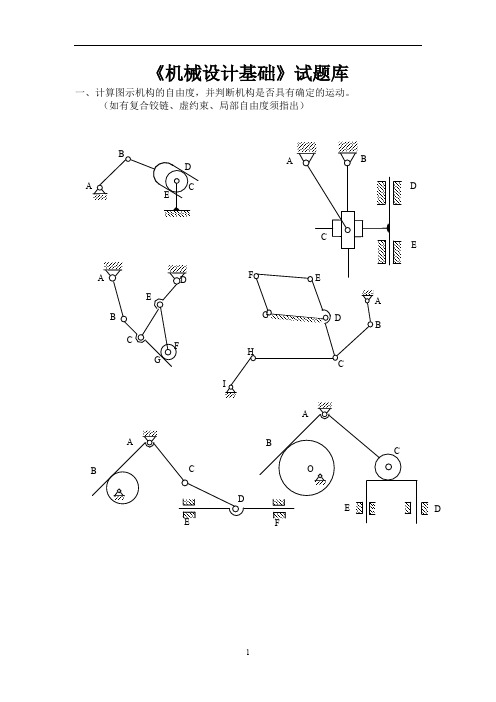
《机械设计基础》试题库一、计算图示机构的自由度,并判断机构是否具有确定的运动。
(如有复合铰链、虚约束、局部自由度须指出)DEDCDDE二、轮系的计算1.在图示轮系中,已知各轮齿数为Z1=Z3=30,Z2=90,Z2’=40,Z3’=40,Z4=30,试求传动比i1H,并说明I、H轴的转向是否相同?2.在图示轮系中,已知各轮齿数为Z1 =15,Z2=20, Z2’ = Z3’= Z4=30, Z3=40,Z 5= 90,试求传动比IⅠⅡ,并说明I、Ⅱ轴的转向是否相同?3.在图示轮系中,已知各轮齿数为Z1=1(右旋蜗杆), Z2=40 ,Z2’= 24,Z3=72,Z,3=18,Z4= 114.1、该轮系属于何种轮系2、求轮系的传动比i1H,并在图中标出系杆H的转向。
4.在图示轮系中,已知各轮齿数为Z1= 20,Z2=30,Z 2’= 50, Z3=80, n1=50r/min,方向如图所示,试求nH的大小和方向。
5.在图示轮系中,已知各轮齿数为Z1= Z4=20,Z 2= Z5=30,Z3= Z6=100,试求传动比i1H。
ⅠⅠⅡ6.在图示轮系中,已知各轮齿数为Z 1=100, Z 2=40,Z 2’=30, Z 3=90, Z ,3=50, Z 4=2(右旋), n 1=200r/min ,n 4=1250r/min ,转向如图所示,试求n H的大小及方向。
7.在图示轮系中,已知各轮齿数为Z 1=15, Z 2=25,Z 2’=20, Z 3=20, Z 4=60,Z 4’= 55, n 1=110r/min ,转向如图所示,试求n h 的大小及转向。
8.某起重装置,其运动简图所图所示,已知各轮齿数为Z 1=Z 2=20,Z 3=60,Z 4=2(蜗杆), Z 5=40,n 1的转向如图所示,试求 1、该轮系属于何种轮系? 2、i 15的大小;3、此时重物W是上升还是下落?三、作图题(按作图规则作图,图线清晰) 1.凸轮为一偏心圆盘。
机械设计基础第5章 轮系习题解答2
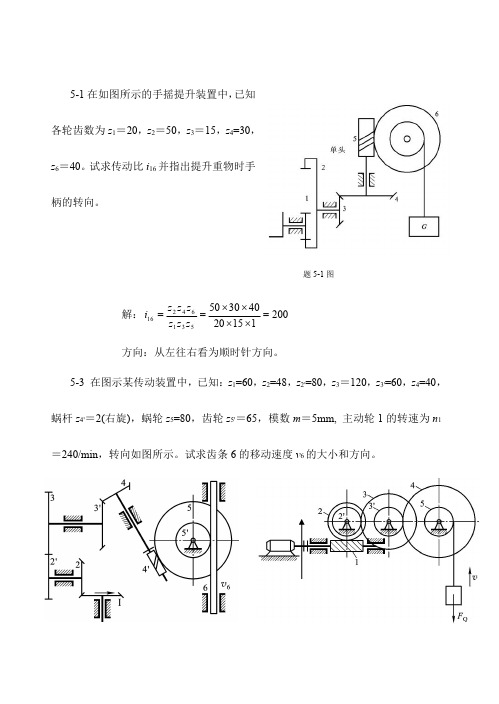
5-1在如图所示的手摇提升装置中,已知各轮齿数为z 1=20,z 2=50,z 3=15,z 4=30,z 6=40。
试求传动比i 16并指出提升重物时手柄的转向。
题5-1图解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i 方向:从左往右看为顺时针方向。
5-3在图示某传动装置中,已知:z 1=60,z 2=48,z 2'=80,z 3=120,z 3'=60,z 4=40,蜗杆z 4'=2(右旋),蜗轮z 5=80,齿轮z 5'=65,模数m =5mm,主动轮1的转速为n 1=240/min ,转向如图所示。
试求齿条6的移动速度v 6的大小和方向。
题5-3图题5-4图解:齿条的移动方向如图所示,其轮系传动比为:322608060804012048'4'3'2154325115=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i 则齿轮5’的转速为:min /5.7322401515r i n n ===又齿轮5’分度圆直径为:mm m z d 325565'5'5=⨯==所以齿条的移动速度为:s m n d v /128.0600005.73251000605'56=⨯⨯=⨯=ππ5-4如图所示为一电动卷扬机的传动简图。
已知蜗杆1为单头右旋蜗杆,蜗轮2的齿数z 2=42,其余各轮齿数为z 2'=18,z 3=78,z 3'=18,z 4=55;卷筒5与齿轮4固联,其直径D 5=400mm ,电动机转速。
n 1=1500r/min ,试求:(1)转筒5的转速n 5的人小和重物的移动速度v 。
(2)提升重物时,电动机应该以什么方向旋转?解:1.其轮系传动比为:11.5569500518181557842'3'214324114==⨯⨯⨯⨯===z z z z z z n n i 则齿轮4的转速(即转筒5的转速)为:min /70.211.556150014145r i n n n ====所以重物的移动速度为:s m n D v /057.0600007.2400100060556=⨯⨯=⨯=ππ5-5在如图所示周转轮系中,已知各轮齿数为z 1=60,z 2=20,z 2'=20,z 3=20,z 4=20,z 5=100,试求传动比i 41。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
福建专升本复习资料(二)
轮系计算
1.
2.在图示的轮系中,设z1=z2=30,z3=90,试求在同一时间内当构件1和3的转数分别为n1=1,n3=-1(设逆时针为正)时,n H及i1H的值。
3.图示为一电动卷扬机的减速器运动简图,已知各轮齿数,试求:传动比
i15。
4.在图示的电动三爪卡盘传动轮系中,设已知各轮齿数为:Z1=30,Z2=Z2’=35,Z3=90,Z4=60,求传动比i14。
5.在图示轮系中,已知:Z1=22,Z3=88,Z3’=Z5,试求传动比i15。
6.图示为双螺旋桨飞机的减速器中,已知:Za=26,Zb=66,Zg=20,Za’=30,Zg’=18,Zb’=66,若na=15000rpm时,求np及nQ的大小及转向。
7.图示为一种大速比减速器的示意图,动力由齿轮1处输入,H处输出.已知各轮齿数为:Z1=12,Z2=48, Z3=72,Z2’=48,Z3’=96,Z4=12,试求传动比i1H。
8.如图所示轮系机构中,已知:Z2=Z5=30,Z2’=22.各齿轮模数均相同,试求传动比i54。
9.图示为用于自动化照明灯具上的轮系,已知输入轴转速n1=19.5rpm,各轮的齿数分别为:Z1=60,Z2=Z2’=30,Z3=Z4=40,Z5=120,试求箱体的转速?
10.图示的轮系中,已知各轮齿数为Z1=60,Z2=20,Z2’=20,Z3=Z4=20,Z5=100,试求
传动比i41?
11.在图示的混合轮系中,已知Z1=Z5’=1,Z3=99,Z4’=101,Z2=Z4=Z5=Z6=100,各轮的模数相同,压力角相等.求:
1、i16
2、若w1顺时针方向转动,那么w6的转向如何?
3、回归轮系,3-4-4’-5中,为满足同心条件,应采用哪种变位传动方案较好?为什么?若此回归
轮系既要满足同心条件,又要保证实现标准齿轮传动应采用什么方法?
4、若已知蜗杆1,蜗轮2组成的传动中,它们的模数m=2mm,蜗杆特性系数q=13,那么蜗杆、蜗轮
传动的中心距a12=?
12.图示轮系中蜗杆1为双头左旋蜗杆Z1=2,转向如图所示。
蜗轮的齿数为Z2=50,蜗杆2为单头右旋蜗杆Z2’=1,蜗轮3的齿数为Z3=40,其余各轮齿数为Z3’=30,Z4=20,Z4’=26,Z5=18,Z5’=46,Z6=16, Z7=22。
求i17。
13.在图示传动系统中,件1、5为蜗杆,件2、6为蜗轮,件3、4为斜齿轮,件7、8为锥齿轮。
已知蜗杆1为主动,要求输出轮8的回转方向如图示。
试确定:
1)各轴的回转方向(画在图上);
2)考虑Ⅰ、Ⅱ、Ⅲ轴上所受轴向力能抵消一部分,
定出各轮的螺旋线方向(画在图上);
3)画出各轮的轴向力的方向,并画出轮4所受的力。
14.
15.。
16.
17.
18.在图所示轮系中,已知各轮齿数为:Z1=Z1'=40,Z2=Z4=30,Z3=Z5=100。
试求传动动比。
19.在图所示轮系中,已知各轮齿数为:Z1=24,Z1'=30,Z2=95,Z3=89,Z3'=102,Z4=80,Z4'=40,Z5=17。
试求传动比i15。
20.在图所示的轮系中,已知各轮齿数为:Z1=90,Z2=60,z2'=30,Z3=30,Z3'=24,Z4=18,Z5=60,Z5'=36,Z6=32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min转向如图所示。
试求输出轴H的转速n H的大小和方向。
21.
22.
23.
24.
25.
26.(H,5为一整体)电动卷扬机减速器Z1=24,Z2=48,Z2'=30,Z3=90,Z3'=20,Z4=30,Z5=80,求i1H。
轮系计算题答案:
1.
解:此轮系的转化机构的传动比为:
2.
(负号表明二者的转向相反)
3.解:首先,分解轮系
齿轮1、3、2-2´、5组成周转轮系,有
齿轮3´、4、5组成定轴轮系,有
4.(-8)
5.(9)
6.(4239.13rpm,1324.74rpm)
7.(36)
8.(-7.14)
9.(6.5rpm)10.(-1.5)11.11.1.(108)11.4.(113mm)
12.i 17=Z 2Z 3Z 4Z 5Z 6Z 7/Z 1Z 2'Z 3'Z 4'Z 5'Z 6=50*40*20*18*22/2*1*30*26*46=220.7
13.
解:1.如图所示
2.如图所示
3.如图所示齿轮四:
14.
15.
16.
17.
18.解:对于由齿轮1,2,3和齿轮5(系杆)所组成的周转轮系(行星轮系),有
由于,故有:化简后可得:-----(a)
对于由齿轮1’,4,5和系杆H所组成的周转轮系(差动轮系),有
即-----(b)
分析两个基本轮系的联系,可知-----(c)
将(a)、(c)两式代人(b)式,可得化简整理后可得
计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
19.解:对于由齿轮3',4-4',5和系杆H所组成的周转轮系,有:
即-------(a)
对于由齿轮1-1',2,3所组成的定轴轮系,有:即:-------(b)
即:------(c)
分析定轴轮系部分与周转轮系部分的联系,可知
故有-------(d)-------(e)
将(d)(e)两式代人(a)式,得整理后得:
计算结果i15为正,说明1轮与5轮转向相同。
20.解:对于由齿轮3',4,5和系杆H组成的周转轮系(差动轮系),有即:
对于由齿轮1,2,2',3所组成的定轴轮系,有即:
对于由齿轮5’和6组成的定轴轮系,有即
分析上述三个基本轮系之间的联系,有
将该结果代入(A )式,可得
化简整理后得:
21.
22.23.
24.解:(1)先用箭头法标志出各轮的转向,如图12.5所示。
由于锥齿轮轴向力指向大端,因此可以判
断出蜗轮轴向力水平向右,从而判断出蜗杆的转向为顺时针,如图12.5所示。
因此根据蜗轮和蜗杆的转向,用手握法可以判定蜗杆螺旋线为右旋。
(2)各轮轴轴向力方向如图12.5所示。
25.解:(1)从图示看,这是一个左旋蜗杆,因此用右手握杆,四指,大拇指,可以
得到从主视图上看,蜗轮顺时针旋转。
(2)由题意,根据已知条件,可以得到蜗轮上的转矩为
蜗杆的圆周力与蜗轮的轴向力大小相等,方向相反,即:
蜗杆的轴向力与蜗轮的圆周力大小相等,方向相反,即:
蜗杆的径向力与蜗轮的径向力大小相等,方向相反,即:
26.解:从图中可看出1,2-2',3,H——周转轮系
3',4,5——定轴轮系联立>>21323113)1(′′−=−−=Z Z Z Z i H H H ωωωω35
5353′
′′−==Z Z i ωω⎭⎬⎫==′533ωωωωH 311=H i min /14501r n =min /77.4631145011r i n n H H ≈==。