摄像头智能循迹小车设计与实现
智能循迹小车___设计报告
智能循迹小车___设计报告设计报告:智能循迹小车一、设计背景智能循迹小车是一种能够通过感知地面上的线条进行导航的小型机器人。
循迹小车可以应用于许多领域,如仓库管理、物流配送、家庭服务等。
本设计旨在开发一款功能强大、性能稳定的智能循迹小车,以满足不同领域的需求。
二、设计目标1.实现循迹功能:小车能够准确地识别地面上的线条,并按照线条进行导航。
2.提供远程控制功能:用户可以通过无线遥控器对小车进行控制,包括前进、后退、转向等操作。
3.具备避障功能:小车能够识别和避开遇到的障碍物,确保行驶安全。
4.具备环境感知功能:小车能够感知周围环境,包括温度、湿度、光照等参数,并将数据传输给用户端。
5.高稳定性和可靠性:设计小车的硬件和软件应具备较高的稳定性和可靠性,以保证长时间的工作和使用。
三、设计方案1.硬件设计:(1) 采用Arduino控制器作为主控制单元,与传感器、驱动器等硬件模块进行连接和交互。
(2)使用红外传感器作为循迹传感器,通过检测地面上的线条来实现循迹功能。
(3)使用超声波传感器来检测小车前方的障碍物,以实现避障功能。
(4)添加温湿度传感器和光照传感器,以提供环境感知功能。
(5)将无线模块与控制器连接,以实现远程控制功能。
2.软件设计:(1) 使用Arduino编程语言进行程序设计,编写循迹、避障和远程控制的算法。
(2)设计用户界面,通过无线模块将控制信号发送给小车,实现远程控制。
(3)编写数据传输和处理的程序,将环境感知数据发送到用户端进行显示和分析。
四、实施计划1.硬件搭建:按照设计方案中的硬件模块需求,选购所需元件并进行搭建。
2.软件开发:根据设计方案中的软件设计需求,编写相应的程序并进行测试。
3.功能调试:对小车的循迹、避障、远程控制和环境感知功能进行调试和优化。
4.性能测试:使用不同场景和材料的线条进行测试,验证小车的循迹性能。
5.用户界面开发:设计用户端的界面,并完成与小车的远程控制功能的对接。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能与自动控制技术的快速发展,智能小车已经广泛应用于各种领域,如物流配送、环境监测、智能家居等。
本文将详细介绍一种自循迹智能小车控制系统的设计与实现过程,该系统能够根据预设路径实现自主循迹、避障及精确控制。
二、系统设计(一)系统概述自循迹智能小车控制系统主要由控制系统硬件、传感器模块、电机驱动模块等组成。
其中,控制系统硬件采用高性能单片机或微处理器作为主控芯片,实现对小车的控制。
传感器模块包括超声波测距传感器、红外线测距传感器等,用于感知周围环境并实时传输数据给主控芯片。
电机驱动模块负责驱动小车行驶。
(二)硬件设计1. 主控芯片:采用高性能单片机或微处理器,具备高精度计算能力、实时响应和良好的可扩展性。
2. 传感器模块:包括超声波测距传感器和红外线测距传感器。
超声波测距传感器用于测量小车与障碍物之间的距离,红外线测距传感器用于检测小车行驶路径上的标志线。
3. 电机驱动模块:采用直流电机和电机驱动器,实现对小车的精确控制。
4. 电源模块:为整个系统提供稳定的电源供应。
(三)软件设计1. 控制系统软件采用模块化设计,包括主控程序、传感器数据处理程序、电机控制程序等。
2. 主控程序负责整个系统的协调与控制,根据传感器数据实时调整小车的行驶状态。
3. 传感器数据处理程序负责对传感器数据进行处理和分析,包括距离测量、方向判断等。
4. 电机控制程序根据主控程序的指令,控制电机的运转,实现小车的精确控制。
(四)系统实现根据设计需求,通过电路设计与焊接、传感器模块的安装与调试、电机驱动模块的安装与调试等步骤,完成自循迹智能小车控制系统的硬件实现。
在软件方面,编写各模块的程序代码,并进行调试与优化,确保系统能够正常运行并实现预期功能。
三、系统功能实现及测试(一)自循迹功能实现自循迹功能通过红外线测距传感器实现。
当小车行驶时,红外线测距传感器不断检测地面上的标志线,并根据检测结果调整小车的行驶方向,使小车始终沿着预设路径行驶。
课程设计智能寻迹小车设计与实现

目录目录I智能寻迹小车设计与实现ISmart Car Design and Implementation of TractingI 第1章绪论1第2章系统的硬件及设计原理22.1 STC89C52单片机22.1.1 STC89C52管脚功能22.1.2复位72.2光电电路概况82.2.1防撞82.2.2寻迹82.3显示电路82.3.1数码管82.3.2发光二极管92.4电机控制电路92.4.1电机的选择方案92.5声控112.6串口通信11第3章系统软件设计113.1总体设计方案和框图11第4章安装调试194.1焊接194.2调试(常见问题)19第5章总结心得21智能寻迹小车设计与实现[摘要]本设计是以STC89C52为主控核心的简易智能小车系统,实现了小车沿黑带寻迹,编程跑,光开关跑等功能并对其动作相应显示。
驱动电机采用L9110直流电机控制芯片。
小车软件设计采用分块编程,每个模块实现一个功能,然后通过按键控制小车每个状态切换。
小车采用按键控制,当接通电源后,小车显示部分会显示已经准备好了,然后按开关键,进入寻迹过程。
寻白线时,外部环境光线的强弱对小车的运动会产生很大的影响,基于此原因,本实验中的寻迹是指在白色地板上寻黑线。
寻迹是指通过红外发射管和接收管识别路径。
[关键词] STC89C52 直流电机黑带寻迹智能寻迹小车红外发射管Smart Car Design and Implementation of Tracting[Abstract] :This design is the core of STC89C52 as the controller simple intelligent car system, realize the car along the black belt tracing, programming run, light switch function such as run and the correspondingaction shows. The motor drive L9110 dc motor control chip. The car softwaredesign using block programming, each module implements a function, and thenthrough the button control car every state switch. The control car keys,when switching power supply, the car shows partial will display is ready,and then press enter a key, tracing process. Find the white line, and theexternal environment of the strength of the light car will produce significant, based on the reason for this, the experiments of tracing isto point to in white floor found the black line. Tracing is through theinfrared tubes and receive the recognition path.[Keywords]:STC89C52 Dc motor Black belt tracing Intelligenttracing the car Infrared tubes第1章绪论单片机益智系列——智能寻迹机器人是由益芯科技有限公司为科教方便而研发设计。
(2024年)智能循迹小车设计
通过红外、超声波等传感器感知周围环境信息,将感知数据传输给微控制器进行处理,微控制器根据预设算法控制执行器调整小车行驶状态,实现循迹功能。
4
2024/3/26
随着工业自动化的发展,智能循迹小车在生产线、仓库等场景中的应用需求不断增加。
自动化需求
教育领域需求
娱乐领域需求
智能循迹小车作为教学实验平台,在高等教育、职业教育等领域具有广泛应用前景。
高精度定位技术
30
2024/3/26
THANKS
感谢您的观看。
31
2024/3/26
模块测试
集成测试
仿真测试
实地测试
将所有模块集成在一起进行测试,验证系统整体功能是否正常。
使用仿真软件对智能循迹小车进行仿真测试,模拟实际运行环境。
在实际场地对智能循迹小车进行测试,验证其在实际环境中的性能表现。
21
2024/3/26
系统联调
将硬件和软件集成在一起进行系统联调,确保系统整体运行稳定可靠。
智能循迹小车设计
1
2024/3/26
目录
项目背景与意义系统总体设计循迹算法研究控制系统设计调试与测试项目成果展示总结与展望
2
2024/3/26
01
CHAPTER
项目背景与意义
3
2024/3/26
定义
智能循迹小车是一种基于微控制器、传感器和执行器等技术的自主导航小车,能够按照预定路径进行自动循迹。
电机类型
选用直流电机或步进电机,根据实际需求进行选择。
保护措施
加入过流保护、过热保护等电路,确保电机和驱动电路的安全运行。
17
2024/3/26
18
2024/3/26
智能循迹小车设计与实现

智能循迹小车设计与实现摘要:智能循迹小车是一种能够根据预设的路径自动行驶的装置。
本文主要介绍了智能循迹小车的设计与实现过程,包括硬件设计、软件编程以及测试和优化等内容。
通过使用光电传感器和电机驱动模块,实现了小车的自动行驶功能。
实验结果表明,智能循迹小车能够准确地沿着指定的路径行驶。
关键词:智能循迹小车,光电传感器,电机驱动模块1.引言智能循迹小车是一种基于传感器和控制模块的自动驾驶装置。
它能够通过感知周围环境并根据预先设定的路径进行行驶。
智能循迹小车在工业生产、仓储管理和物流配送等领域具有广泛的应用前景。
本文主要介绍了智能循迹小车的设计与实现过程。
2.硬件设计主控模块采用单片机作为核心处理器,并配备了存储器、通信接口和控制信号输出等功能。
传感器模块主要由光电传感器组成,用于感知小车当前位置和行驶方向。
执行器模块由电机驱动模块组成,用于控制小车的移动。
3.软件编程传感器数据采集模块负责读取光电传感器的输出信号,并进行信号处理和滤波。
路径规划模块通过分析传感器数据,确定小车当前位置和行驶方向,并根据预设的路径规划算法,确定下一步行驶方向。
运动控制模块通过调节电机驱动模块的输入信号,控制小车的运动。
4.测试与优化为了验证智能循迹小车的性能,我们进行了一系列的测试和优化。
首先,我们对传感器进行了校准,以确保其输出信号的准确性。
然后,我们在实际场景中对小车进行了测试,包括行驶精度、速度和稳定性等方面的测试。
根据测试结果,我们对软件进行了调优,并对硬件进行了优化,以提高智能循迹小车的性能。
5.结论本文介绍了智能循迹小车的设计与实现过程。
通过使用光电传感器和电机驱动模块,我们实现了小车的自动行驶功能。
实验表明,智能循迹小车能够准确地沿着指定的路径行驶。
未来,我们将进一步改进小车的设计和算法,以提高其性能和适应性。
智能循迹小车设计方案
智能循迹小车设计方案一、设计目标:1.实现智能循迹功能,能够沿着预定轨迹自动行驶。
2.具备避障功能,能够识别前方的障碍物并及时避开。
3.具备远程遥控功能,方便用户进行操作和控制。
4.具备数据上报功能,能够实时反馈运行状态和数据。
二、硬件设计:1.主控模块:使用单片机或者开发板作为主控模块,负责控制整个小车的运行和数据处理。
2.传感器模块:-光电循迹传感器:用于检测小车当前位置,根据光线的反射情况确定移动方向。
-超声波传感器:用于检测前方是否有障碍物,通过测量障碍物距离来判断是否需要避开。
3.驱动模块:-电机和轮子:用于实现小车的运动,可选用直流电机或者步进电机,轮子要具备良好的抓地力和摩擦力。
-舵机:用于实现小车的转向,根据循迹传感器的信号来控制舵机的角度。
4.通信模块:-Wi-Fi模块:用于实现远程遥控功能,将小车与遥控设备连接在同一个无线网络中,通过网络通信进行控制。
-数据传输模块:用于实现数据上报功能,将小车的运行状态和数据通过无线通信传输到指定的接收端。
三、软件设计:1.循迹算法:根据光电循迹传感器的反馈信号,确定小车的行进方向。
为了提高循迹的精度和稳定性,可以采用PID控制算法进行修正。
2.避障算法:通过超声波传感器检测前方障碍物的距离,当距离过近时,触发避障算法,通过调整小车的行进方向来避开障碍物。
3.遥控功能:通过Wi-Fi模块与遥控设备建立连接,接收遥控指令并解析,根据指令调整小车的运动状态。
4.数据上报功能:定时采集小车的各项运行数据,并通过数据传输模块将数据发送到指定的接收端,供用户进行实时监测和分析。
四、系统实现:1.硬件组装:根据设计要求进行硬件的组装和连接,确保各个模块之间的正常通信。
2.软件编程:根据功能要求,进行主控模块的编程,实现循迹、避障、遥控和数据上报等功能。
3.调试测试:对整个系统进行调试和测试,确保各项功能正常运行,并进行性能和稳定性的优化。
4.用户界面设计:设计一个用户友好的界面,实现对小车的远程控制和数据监测,提供良好的用户体验。
循迹智能车的设计与制作实验报告

电子技术选修课姓名:学号:专业:题目:循迹智能车的设计与制作实验报告设计地点:设计日期:成绩:指导老师:2015年4月10日一、硬件组装:1、车模套件1万向轮2车底板3驱动轮4主控板5传感器2、车模组装车模组装一:万向轮的安装车模组装二:驱动轮安装1上长脚螺丝2上专用紧固件3固定轮子4固定到小车底盘上(提前焊接电机连接线)二、硬件电路设计与制作1硬件构成原理图2硬件组成1检测单元控制器利用安装于车体前方的循迹传感器实时检测小车的位置,根据小车所处的位置及时调整小车的运行速度和方向,使得小车能够始终沿着引导线运行。
红外对管光电传感器,采用软件编程实现数字化编码。
红外对管:检测原理:当发射管发出的光线照射在赛道的不同位置时,接收管的状态发生较大变化,通过相应的处理电路就可以获得此时的状态值,进行路径的判断。
贴近白色赛道,传感器输出电压达到最大值:约4.7V;远离白色赛道,传感器输出电压达到最小值:约0.2V;贴近黑色赛道,传感器输出电压:约为0.7V。
为保证循迹智能汽车能够按照赛道引导线运行,一般需要多个传感器同时检测赛道。
理论上讲,所用的传感器越多,对赛道的检测则越精确,控制越灵活,但是,当传感器数量增多时,占用的单片机管脚增多,处理电路也增多,消耗的电量也越多。
因此,从实际应用的角度考虑,需合理选择传感器的数量。
另外,传感器的不同排列方式也会对赛道的检测有不同的作用。
循迹传感器采用的是灰度传感器,当传感器位于不同的位置(黑色引导线、白板)时,输出电压值不同,控制器通过对循迹传感器电压值的采样,获取道路信息。
2电机驱动智能汽车由直流电机提供动力,电机由车载直流电源供电,小车在运行过程中需要根据赛道设定合适的速度,即需要对电机速度进行控制。
因此,一般需要通过电机驱动电路向电机提供可以调节输出电压的电源,以控制小车的速度。
使用L298N电机驱动芯片:L298N硬件电路原理图L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
智能循迹避障小车设计

智能循迹避障小车设计智能循迹避障小车的核心功能在于能够沿着特定的轨迹行驶,同时能够避开行驶过程中遇到的障碍物。
要实现这两个功能,需要在硬件和软件两个方面进行精心设计。
在硬件方面,首先是小车的车体结构。
通常选用坚固且轻便的材料,以保证小车的稳定性和灵活性。
车轮的选择也很重要,需要具备良好的抓地力和转动性能。
传感器是实现智能循迹避障功能的关键部件。
对于循迹功能,常用的是光电传感器或摄像头。
光电传感器通过检测地面上的反射光来判断轨迹,而摄像头则可以通过图像识别技术获取更精确的轨迹信息。
在避障方面,超声波传感器或红外传感器是常见的选择。
超声波传感器通过发射超声波并接收反射波来测量与障碍物的距离,红外传感器则通过检测障碍物反射的红外线来实现避障功能。
控制模块是小车的大脑,负责处理传感器采集到的数据,并控制电机的运转。
常用的控制芯片有单片机,如 Arduino 或 STM32 等。
电机驱动模块则用于将控制模块输出的信号转换为电机所需的驱动电流,以实现小车的前进、后退、转弯等动作。
电源模块为整个小车系统提供稳定的电力供应。
一般选择可充电的锂电池,其具有较高的能量密度和较长的续航能力。
在软件方面,编写高效可靠的程序是实现智能循迹避障功能的关键。
首先是传感器数据的采集和处理程序。
对于光电传感器或摄像头采集到的轨迹信息,需要进行滤波、放大等处理,以提高数据的准确性和可靠性。
对于超声波传感器或红外传感器采集到的避障数据,需要进行距离计算和障碍物判断。
控制算法是软件的核心部分。
对于循迹功能,常用的算法有 PID 控制算法。
通过不断调整电机的转速和转向,使小车能够准确地沿着轨迹行驶。
对于避障功能,通常采用基于距离的控制策略。
当检测到障碍物距离较近时,及时控制小车转向或停止,以避免碰撞。
电机控制程序负责根据控制算法的输出结果,精确控制电机的运转。
这需要对电机的特性有深入的了解,以实现平稳、快速的运动控制。
为了提高小车的性能和稳定性,还需要进行系统的调试和优化。
摄像头智能循迹小车

智能摄像头小车的设计与制作一.设计思想与总体方案1,设计思想小车行驶过程中,通过摄像头探测前方的黑线,将采集到的信息传回单片机,通过判断黑线的形状和曲率调整舵机转角,使小车沿黑线行驶,达到循迹功能。
2,总体设计方案本设计以Freescale16位单片机、MC9SXS128作为检测和控制核心,用CCD 摄像头探测黑线,飞思卡尔车体。
3 摄像头选择由于对车体的控制方法都是基于对赛道黑线的准确提取与判断上的,所以对外界信息采集的唯一入口的摄像头传感器选择就显得尤为重要。
本次实验所选用的摄像头为CCD摄像头相比较而言,CMOS 数字摄像头硬件电路相对简单,工作电压低,电流小,功耗小,工作稳定。
但是在动态图像的现实中不如 CCD 摄像头清晰,而且噪音比较大,灵敏度低。
小车在高速运动情况下,不仅有小车沿赛道延伸方向的速度,还有位置校正带来的横向摆动,这样一来,黑线在曝光时间内不稳定,产生了图像不实。
在这一点 CCD 摄像头有更大的优势,它噪音小,灵敏度高,信噪比大,所以我们选择CCD摄像头,以适应小车高速运动的情况。
二.系统硬件结构设计本系统硬件结构主要由 HCS12 控制核心、电源管理单元、摄像头模拟信号采集电路、车速检测模块、转向伺服电机控制电路和直流驱动电机控制电路组成,其系统硬件结构如图1.1所示。
图1.1 系统硬件框图1,单片机单元XS128 最小系统我们采用了自己设计制作的最小系统板,采用MC9SXS128芯片作为控制芯片。
具有体积小,性能稳定的特点。
主频最高可达到90M,图2.8为系统版原理图。
图 2.8 最小系统板原理图3,测速电路设计由于今年的车模是双电机,要对小车进行很好的控制就必须实时的监测小车的运行状态,即检测小车的运行速度。
MC9SXS128系统板自带一路脉冲捕捉电路,可以测出一个电机的速度,另一个电机的速度我们采用74HC161芯片来计数测出电机的当前速度,其电路原理图如图2.11所示。
智能循迹小车设计与训练

智能循迹小车设计与训练智能循迹小车是一种集机械、电子、计算机等多种技术于一身的智能设备,它能够根据预设的轨迹路径自主行驶,具备避障、自动导航等功能。
设计与训练智能循迹小车需要综合运用多种技术,包括传感器技术、机器学习算法等,以实现小车的自主导航能力。
智能循迹小车需要搭载各种类型的传感器,如红外线传感器、超声波传感器等,以实时感知周围环境信息。
通过这些传感器,小车能够检测到前方是否有障碍物,并根据传感器所接收到的信号进行判断和决策。
例如,当红外线传感器检测到前方有障碍物时,小车会及时采取避障动作,避免与障碍物发生碰撞。
智能循迹小车还需要具备学习能力,能够通过训练来识别不同的轨迹路径。
在训练过程中,我们可以将小车放置在预设的轨迹路径上,并通过传感器获取到对应的环境信息。
随后,将这些信息输入到机器学习算法中进行训练,以让小车学习到正确的轨迹路径。
通过反复训练,小车能够逐渐掌握识别轨迹路径的能力,并能够在实际应用中进行准确的导航。
在训练过程中,我们还可以引入强化学习算法,以进一步提升小车的导航能力。
通过设置奖励机制,可以使小车在训练过程中逐步优化行为策略,以达到最优导航效果。
例如,我们可以给予小车在正确的轨迹路径上行驶时正向奖励,而在偏离轨迹路径时给予负向奖励。
通过不断调整奖励机制,小车能够逐渐学会选择最优的行驶路径,并能够在复杂环境中完成高效的导航任务。
除了基本的循迹导航功能,智能循迹小车还可以进一步拓展其他应用场景。
例如,可以通过增加摄像头模块,使小车能够实现视觉识别功能,进而实现对特定物体的识别和跟踪。
同时,小车还可以配备声音传感器,实现对声音信号的感知和识别,从而能够与用户进行语音交互。
这样的应用场景使得智能循迹小车具备更加广泛的实用性,能够应用于智能家居、物流配送等领域。
智能循迹小车的设计与训练需要综合运用传感器技术、机器学习算法等多种技术,以实现小车的自主导航能力。
通过训练和优化,小车能够学习到正确的轨迹路径,并能够在实际应用中完成准确的导航任务。
自动循迹智能小车的研究与实现
自动循迹智能小车的研究与实现自动循迹智能小车的研究与实现引言近年来,随着人工智能技术的快速发展,各类智能机器人逐渐走入人们的生活。
其中,自动循迹智能小车作为一种常见的应用,广泛用于自动化仓储和物流系统中。
本文将讨论自动循迹智能小车的研究与实现,探究其原理、核心技术及应用前景。
一、自动循迹智能小车概述自动循迹智能小车是一种基于机器视觉和自动控制技术的智能设备,能够通过摄像头或传感器感知环境,实现自主巡航和路径规划。
该小车广泛应用于工业生产线、仓储系统和物流分拣等领域,能够提高生产效率和物流运输效能。
二、自动循迹原理自动循迹智能小车的核心原理是通过摄像头或传感器获取环境信息,并将其输入至算法模块进行处理分析。
具体实现过程可分为以下几个步骤:1. 环境感知:通过摄像头或传感器获取道路或路径信息,包括线段的位置、角度、形状等。
2. 图像处理:对摄像头采集到的图像进行预处理,包括灰度化、二值化、滤波等操作,以便后续的图像分析和轨迹提取。
3. 边缘检测:基于图像处理结果,使用边缘检测算法找到路线上的边缘,获取路径的几何信息。
4. 轨迹提取:根据边缘检测结果,利用曲线拟合等数学算法,提取出路径的具体轨迹。
5. 控制策略:根据提取出的路径信息,设计合适的控制策略,使小车能够按照路径自动行驶。
三、自动循迹智能小车的关键技术1. 视觉识别技术:通过摄像头获取环境信息,并对图像进行处理、分析,从中提取出路径的几何信息。
2. 图像处理与边缘检测技术:对摄像头采集的图像进行预处理,包括灰度化、二值化、滤波等操作,并通过边缘检测算法找到路线上的边缘。
3. 轨迹提取与建模技术:基于边缘检测结果,使用曲线拟合等数学算法,提取出路径的具体轨迹,并对路径进行建模。
4. 自动控制技术:根据提取的路径信息设计适当的控制策略,使小车能够按照路径自动行驶。
四、自动循迹智能小车的应用前景自动循迹智能小车在工业生产线、仓储系统和物流分拣等领域具有广阔的应用前景。
自循迹智能小车控制系统的设计与实现

自循迹智能小车控制系统的设计与实现一、引言随着科技的不断发展,智能小车在工业自动化和机器人领域得到了广泛的应用。
自循迹智能小车作为这一领域中的重要应用之一,具有广泛的应用前景。
本文将探讨。
二、自循迹智能小车的原理自循迹智能小车是通过图片识别及算法判断来实现自动行进的智能车辆。
其原理基于图像处理技术和机器学习算法,通过识别地面上的线路图案,来判断车辆的行进方向。
三、1. 硬件设计自循迹智能小车的硬件设计主要包括传感器、控制器和执行器。
传感器用于获取地面图案的图像信息,控制器用于接收处理传感器的数据,并通过执行器来实现小车的运动。
2. 软件设计自循迹智能小车的软件设计主要包括图像处理算法和控制算法。
图像处理算法使用计算机视觉技术,通过分析图像中的线路信息来确定行车方向。
控制算法根据图像处理的结果,对小车进行控制,让其按照预定的路线行驶。
3. 系统集成与调试将硬件和软件进行集成,并进行系统调试。
在此过程中,需要对传感器的位置、灵敏度等进行调整,以确保能够获取准确的图像信息。
同时,还需要对图像处理和控制算法进行调试,以确保小车能够按照预定的路线行驶。
四、实验结果与分析在实验中,我们设计了一个自循迹智能小车,并进行了多组实验。
实验结果表明,我们设计的自循迹智能小车能够准确地识别地面上的线路图案,并按照预定的路线进行行驶。
实验结果也表明,我们设计的自循迹智能小车具有较好的鲁棒性,能够适应不同复杂度的线路图案。
五、未来展望自循迹智能小车作为智能化工业自动化领域的重要应用,具有广泛的应用前景。
未来,我们将继续改进自循迹智能小车的识别算法和控制算法,提高其识别和控制的精度和效率。
同时也将尝试将自循迹智能小车应用于实际工业生产中,为提高生产效率和降低人工成本做出贡献。
六、结论本文对进行了探讨。
通过硬件的设计和软件的开发,我们成功实现了一个能够准确识别地面线路图案并按照预定路线行驶的自循迹智能小车。
实验结果表明,我们设计的控制系统具有较高的精度和鲁棒性。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能技术的发展和广泛应用,智能小车系统已经逐渐成为了现代自动化和智能化领域的重要分支。
本文旨在介绍一款自循迹智能小车控制系统的设计与实现过程,从系统需求分析、硬件设计、软件设计、实现与测试等方面详细阐述其设计思路和实现方法。
二、系统需求分析自循迹智能小车控制系统主要应用于自动导航、避障等场景,因此其需求主要包括以下几个方面:1. 能够在各种复杂环境中实现自动导航和避障功能;2. 具备较高的稳定性和可靠性,能够适应不同路面条件;3. 控制系统应具有较高的智能化程度,便于用户操作和维护;4. 系统的硬件和软件设计应具有良好的可扩展性,方便后续升级和维护。
三、硬件设计自循迹智能小车控制系统的硬件设计主要包括电机驱动模块、传感器模块、主控模块等部分。
1. 电机驱动模块:采用直流电机和电机驱动器,通过PWM 信号控制电机的转速和方向,实现小车的运动控制。
2. 传感器模块:包括红外传感器、超声波传感器等,用于检测小车周围的环境信息,实现自动导航和避障功能。
3. 主控模块:采用单片机或微控制器作为主控芯片,负责控制小车的运动和传感器数据的处理。
在硬件设计过程中,需要充分考虑电路的稳定性和抗干扰能力,以及各个模块之间的接口兼容性和通信协议。
四、软件设计自循迹智能小车控制系统的软件设计主要包括操作系统、算法设计、程序设计等部分。
1. 操作系统:采用嵌入式操作系统或实时操作系统,以保证系统的稳定性和实时性。
2. 算法设计:包括导航算法、避障算法等,用于处理传感器数据和控制小车的运动。
其中,导航算法可采用基于路径规划的算法或基于视觉识别的算法;避障算法可采用基于距离阈值的算法或基于机器学习的算法。
3. 程序设计:包括主程序、中断程序、通信程序等,负责控制系统的整体运行和各个模块之间的协调。
在程序设计过程中,需要充分考虑代码的可读性、可维护性和可扩展性。
五、实现与测试在完成硬件和软件设计后,需要进行系统的实现与测试。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的飞速发展,智能小车作为智能交通系统的重要组成部分,已经广泛应用于军事、工业、民用等多个领域。
自循迹智能小车控制系统的设计与实现,成为了智能化进程中一个关键环节。
本文旨在阐述自循迹智能小车控制系统的设计原理和实现过程,分析系统结构与功能,为相关研究与应用提供参考。
二、系统设计1. 硬件设计自循迹智能小车控制系统硬件主要包括:电机驱动模块、传感器模块、主控制器模块等。
其中,电机驱动模块负责驱动小车前进、后退、转向等动作;传感器模块包括红外传感器、超声波传感器等,用于检测小车周围环境及路径信息;主控制器模块采用高性能微控制器,负责协调各模块工作,实现小车的自主循迹。
2. 软件设计软件设计包括控制系统算法设计和程序编写。
控制系统算法主要包括路径识别算法、速度控制算法、避障算法等。
程序编写采用模块化设计思想,将系统功能划分为多个模块,如电机控制模块、传感器数据采集模块、路径识别与决策模块等。
各模块之间通过通信接口进行数据交换,实现小车的自主循迹。
三、实现过程1. 传感器数据采集与处理传感器模块负责采集小车周围环境及路径信息,包括红外传感器、超声波传感器等。
这些传感器将采集到的数据传输至主控制器模块,经过数据处理与分析,提取出有用的信息,如障碍物位置、路径边界等。
2. 路径识别与决策路径识别与决策模块根据传感器数据,判断小车当前位置及目标路径,并制定相应的行驶策略。
当小车偏离目标路径时,系统会自动调整行驶方向,使小车重新回到目标路径上。
此外,避障算法也在此模块中实现,当检测到障碍物时,系统会及时调整小车的行驶方向,避免与障碍物发生碰撞。
3. 电机控制与驱动电机控制与驱动模块根据主控制器的指令,控制电机的运转,实现小车的前进、后退、转向等动作。
通过调整电机的转速和转向,可以实现对小车速度和行驶方向的精确控制。
四、实验结果与分析通过实验测试,自循迹智能小车控制系统能够在不同环境下实现自主循迹和避障功能。
智能循迹小车设计方案
智能循迹小车设计方案智能循迹小车设计方案智能循迹小车是一种能够根据预设路径自主行驶的无人驾驶车辆。
本设计方案旨在实现一辆智能循迹小车的设计与制作。
一、方案需求:1. 路径规划与控制:根据预设的路径,小车能够准确、迅速地在指定道路上行驶,并能随时调整方向和速度。
2. 传感器控制与反馈:小车具备多种传感器,能够实时感知周围环境和道路状况,如通过红外线传感器检测道路上的障碍物。
3. 自主导航与避障能力:小车能够自主判断并决策前进、转弯或避让,确保安全行驶。
当感知到障碍物时,能及时做出反应避开障碍。
二、方案设计:1. 硬件设计:a. 小车平台:选择合适的小车底盘,具备稳定性和承重能力,大小和外观可以根据实际需求进行设计。
b. 传感器系统:包括红外线传感器、超声波传感器和摄像头等,用于感应周围环境和道路状况。
c. 控制系统:采用单片机或嵌入式控制器,以实现传感器数据的处理、决策和控制小车运动。
2. 软件设计:a. 路径规划与控制算法:通过编程实现路径规划算法,将预设路径转换为小车可以理解的指令,控制小车的运动和转向。
b. 感知与决策算法:根据传感器获取的数据,实时判断周围环境和道路状况,做出相应的决策,例如避开障碍物或调整行驶速度。
c. 系统界面设计:为方便操作和监测,设计一个人机交互界面,显示小车的状态信息和传感器数据。
三、方案实施:1. 硬件实施:根据设计要求选择合适的硬件部件,并将它们组装在一起,搭建小车平台和安装传感器。
确保传感器按照预期工作稳定。
2. 软件实施:使用合适的编程语言开发控制程序。
编写路径规划、感知与决策算法,并将其与硬件系统绑定在一起。
通过测试和调试确保程序的正常运行。
3. 功能测试:对小车进行现场测试,包括路径规划、感知与决策的功能、反应时间和精度等方面的测试。
根据测试结果进行优化和调整。
四、方案展望:1. 增加智能化功能:进一步发展智能循迹小车的功能,添加更多的传感器和算法,实现更高级的自主导航和避障能力。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的不断进步,自动化、智能化成为了各个领域发展的趋势。
在机器人领域中,自循迹智能小车以其简单实用、灵活性高等特点受到了广泛的关注。
本文旨在介绍一款自循迹智能小车的控制系统设计与实现过程,通过对该系统的深入研究与探索,展示其在不同环境下的高效控制能力和实际使用价值。
二、系统概述自循迹智能小车控制系统主要由硬件和软件两部分组成。
硬件部分包括电机驱动模块、传感器模块、电源模块等;软件部分则负责控制算法的实现,包括路径规划、避障、速度控制等。
该系统通过传感器获取环境信息,利用控制算法对小车进行精确控制,实现自循迹功能。
三、硬件设计1. 电机驱动模块:采用舵机驱动模块,通过PWM信号控制电机的转速和方向。
2. 传感器模块:包括红外线传感器、超声波传感器等,用于检测障碍物、识别路径等信息。
3. 电源模块:采用可充电锂电池供电,通过DC-DC转换器将电源稳定输出给各个模块。
四、软件设计1. 路径规划:根据环境信息,采用基于路径识别的算法进行路径规划。
当小车检测到路径时,通过控制算法调整小车的行进方向和速度,保证小车能够准确沿着路径行驶。
2. 避障功能:通过超声波传感器检测障碍物距离,当检测到障碍物时,控制算法会调整小车的行进方向和速度,避免与障碍物发生碰撞。
3. 速度控制:根据环境信息和任务需求,通过PWM信号控制电机的转速和方向,实现精确的速度控制。
五、系统实现1. 传感器数据采集:通过传感器模块实时获取环境信息,包括路径信息、障碍物距离等。
2. 数据处理与算法实现:将传感器数据传输至主控制器,主控制器通过算法对数据进行处理和分析,得出小车的行进方向和速度。
3. 控制输出:主控制器将计算结果通过PWM信号输出给电机驱动模块,控制电机的转速和方向,实现小车的精确控制。
六、实验与结果分析1. 实验环境:在室内外不同环境下进行实验,包括平坦路面、崎岖路面、有障碍物等场景。
基于摄像头自主循迹智能车课件

主销后倾
主销内倾
前轮前束
三 智能车硬件电路设计
系统的稳定性对于硬件电路的设计来说很重要。我 们主要从原理图的设计和pcb绘制工艺上确保系统的稳 定性。
我们采用K60作 为主控芯片,使用 OV7725摄像头对道路 进行识别处理,得出 有效信息作为电机和 舵机的输入量从而控 制车模稳定的行驶。 并且搭载按键、液晶 显示屏、nrf无线通 信模块构成了完整的 智能车系统。
二 智能车机械结构设计
• 1. 摄像头的安装 通过铰链把摄像头与碳杆连接起来,通过改
方向控制是以每场图像隔行提取的中线加权平均作为 参考点,将参考点与80(每行提取160个像素点)做差, 作为PD控制的输入量。
实用性:
智能灭火:由于在存储仓库中,不可能时时 都有人来进行巡查,一旦出现险情就很有可能造 成大的破坏,而智能车就可以向上级报告险情同 时进行相应的应急处理。
此外,还可以搭载温度、湿度等传感器,实 时监测仓库异常。
供电采用TPS系列低压差线性稳压芯片。对于 舵机的供电采用LM2940-ADJ芯片,通过调节电阻 即可将输出端电压调整到6v,该芯片最大可以输 出3A电流,对于舵机完全够用。
主 板 电 路 图
主板PCB
在布局上将主板的模拟部分和数字部分分开,通过0欧电 阻相连,各个部分尽可能的并连单点接地,以减少回路电 流对器件的干扰。其中频率较高的信号线采用了圆弧走线。
考虑到车模电机的特点,我们选择了BTS7960芯片 作为电机的驱动芯片,该芯片具有自我保护的能力,抗 干扰能力强,只需使用4片该芯片即可构成双h桥控制电 路。
自动跟踪小车的设计与实现

自动跟踪小车的设计与实现自动跟踪小车是一种能够根据环境中的目标物体实现自动跟踪的机械设备。
它通常由摄像头、图像处理模块、导航控制模块以及电机驱动模块等组成。
在设计和实现自动跟踪小车时,需要考虑硬件组件的选型、软件算法的设计以及测试与调试等方面。
一、硬件设计在硬件设计方面,首先需要选择合适的摄像头作为感知模块。
常见的选择包括USB摄像头、网络摄像头或者机器人专用摄像头。
摄像头的参数如分辨率、帧率等需要根据实际需求选择合适的型号。
另外,还需要选择适合的图像传输接口,如USB、WiFi等。
接下来是图像处理模块的设计。
图像处理模块可以利用计算机视觉算法对摄像头捕获的图像进行处理,提取目标物体的位置信息。
常见的图像处理算法包括目标检测、目标跟踪、目标识别等。
根据实际应用需求,选择合适的算法并进行实现。
导航控制模块是实现自动跟踪的核心部分。
它根据图像处理模块获取的目标物体位置信息,计算小车需要进行的动作,如前进、后退、转向等。
导航控制模块可以使用单片机或者嵌入式开发板进行实现,通过电机驱动模块控制小车的运动。
二、软件算法设计在软件算法设计方面,需要利用计算机视觉和机器学习等技术实现目标物体的跟踪。
首先,利用图像处理算法对摄像头捕获的图像进行处理,提取目标物体的特征。
然后,根据特征信息计算目标物体的位置和运动方向。
常见的图像处理算法包括色彩空间转换、边缘检测、模板匹配、特征提取等。
这些算法可以通过常用的计算机视觉库(如OpenCV)进行实现。
在目标跟踪方面,可以使用常见的算法,如卡尔曼滤波、粒子滤波等,对目标物体的位置进行追踪和预测。
另外,还可以利用机器学习算法实现目标物体的识别和分类。
通过训练模型,使小车能够识别特定的目标物体,并对其进行跟踪。
常见的机器学习算法包括支持向量机(SVM)、深度学习神经网络等。
三、测试与调试在设计和实现自动跟踪小车后,需要进行测试与调试,确保其功能的稳定和可靠。
首先,对摄像头的配置进行调试,确保摄像头能够正常工作,并能够捕获清晰的图像。
智能循迹小车设计与实现(DOC)

┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊智能循迹小车设计与实现摘要本文介绍的是基于单片机STC89C52控制智能循迹小车的设计.利用红外对光管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的运动,从而实现自动循迹避障的功能。
其中小车的电机由LG9110驱动,整个系统的电路结构简单,可靠性高。
关键词STC89C52 LG9110 红外对光管循迹小车┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊The manufacture of intelligent tracking carAbstract This articale introduces the design of intelligent tracking car based on the STC89C52 single chip computer.Based infrared detection of black lines and the road obstacles,and use a STC89C52 MCU as the controlling core for the movement.A electronic drived,which can automatic track and avoid obstacle,was designed and fabricated.In which,the electric machinery of car is drived by the LG9110.The electric circuit stuction of whole system is simple,and the function is dependable。
Keywords STC89C52 LG9110 Infrared emitting diode Tracking car┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第1章引言随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
De s i g n a nd i mpl e me nt a t i o n o f c a me r a t r a c k i n g s ma r t c a r
YAN Xi , HAN Ti , G AO B o , L I Do n g - x u , YANG J i e
断 的 方 法 ,能 够提 取 出精 确 的路 径 特 征 信 息 , 实践 证 明该 方 法具 有 可行 性 。 关 键 词 :智 能 车 ;摄 像 头 ;路 径识 别 ;控 制算 法
中图分 类 号 :T P 2 9 文 献标识 码 :A 文章 编号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 4 ) 0 5 — 0 1 8 1 — 0 2
第2 2卷 第 5期
V0 1 . 2 2 NO. 5
电子设计 工程
El e c t r o n i c De s i g n En g i n e e r i n g
2 0 1 4年 3ห้องสมุดไป่ตู้
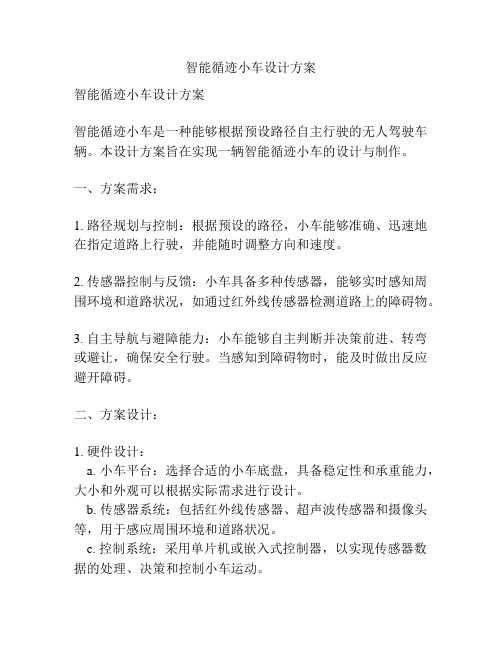
Ma E 2 01 4
摄 像头智 能 循迹小 车设计 与实现
闰 熙 ,韩 娱 ,高 波 ,李 东旭 ,杨 杰
( 大连 东软 信 息 学 院 辽 宁 大连 1 1 6 0 0 0 ) 摘要 : 智 能循 迹 小 车 可 以根 据 前 端 摄 像 头 的输 入 图 像 识 别 出道 路 状 况 ,通 过 优 化 智 能 车 的 软 硬 件 设 计 ,能 够 确 保 其在 不 同环 境 下 行 驶 的 快 速 性 和 准确 性 ,本 文 以 K i n e i f s 6 0为 核 心 处 理 器 , 完成 了 智 能 车路 径检 测 、 速 度 检 测 、 数 据 传 输模 块 、 电机 舵 机 驱 动 模 块 的设 计 与 实现 ,并 在 此 基 础 上 提 出 了一 种 利 用摄 像 头 实 时 图像 进 行 智 能 车 循 迹 判
检测 模 块 由两 个 T C R T 5 0 0 0以及 一个 L M3 3 9组 成 。无 线 数 据 传 输通 过 N R F 2 4 L 0 1 进 行 数据 传输 。 智 能 车 由路 径 传 感 器 采集 得 到 前方 道 路 的 图像 ,从 中提 取 出有用 信 息 , 判 断所 处 的跑 道类 型 ( 直道 , 大 弯道 , S 弯道 ) , 确 定 小 车 的舵 机 转 向及 车 速 。从 而 通 过 电机 和舵 机 驱 动 小 车
d a t a o f p a t h f e a t u r e p o i n t s .P r a c t i c e h a s b e e n p r o v e d t h a t t h e me t h o d c a n j u d g e t h e r o a d a c c u r a t e l y .
( Da l i a n Ne u s o f t U n i v e r s i t y o fI n f o r m a t i o n , Da l i a n 1 1 6 0 0 0 , C h i n a )
Ab s t r a c t : T h e i n t e l l i g e n t t r a c k i n g T r o l l e y r o a d c o n d i t i o n s a c c o r d i n g t o t h e i n p u t i ma g e o f t h e f r o n t c a me r a i d e n t i f i c a t i o n . T h r o u g h o p t i mi z i n g t h e h a r d wa r e a n d s o f t wa r e s y s t e m d e s i g n , i t wi l l b e a b l e t o a d a p t t o d i f f e r e n t C o n d i t i o n s t o e n s u r e r a p i d i t y a n d r e l i a b i l i t y . T h i s s y s t e m ma i n l y i n c l u d e s t h e Ki n e t i s 6 0 a s c e n t r a l p r o c e s s o r ,i n c l u d i n g t h e l i n e d e t e c t i o n mo d u l e ,s p e e d d e t e c t i n g mo d u l e, d a t a t r a n s mi s s i o n mo d u l e, mo t o r d r i v e a n d s e r v o mo d u l e . A r e a l — t i me c a me r a i ma g e i n t e l l i g e n t v e h i c l e t r a c k i n g t o d e t e r mi n e o n t h i s b a s i s , i t h a s s t r o n g p r o p e r t i e s o f r o b u s t n e s s a n d c a n e x t r a c t p r e c i s e
Ke y wo r ds : s ma r t c a r ; c a me r a ; p a t h r e c o g n i t i o n ; c o n t r o l a l g o r i t h m
随着 智 能 交通 系 统 的 广 泛应 用 ,智 能 车 的系 统 控 制也 逐