永磁同步电机弱磁控制的控制策略研究Word版
永磁同步电机弱磁与过调制控制策略研究
永磁同步电机弱磁与过调制控制策略研究陈亚爱;陈焕玉;周京华;甘时霖【摘要】在前入研究的基础上,提出了一种提升永磁同步电机(PMSM)高速带载能力的控制策略.该控制策略能克服电机在最高转速时无法带载的弱点,可靠性高、易于实现.实现该控制策略的算法包含PMSM的弱磁控制和电压空间矢量的过调制控制,使电机能宽范围带载调速.为验证该控制策略,建立了内置式永磁同步电机(IPMSM)的仿真模型,搭建了试验平台,并进行了仿真和试验研究,验证了该控制策略的可行性和有效性.%On the basis of previous research,the control strategy of permanent magnet synchronous motor (PMSM) with high speed of load capacity was promoted,and the control strategy could overcome the weakness that the motor at the highest speed could not be loaded,high reliability and easy to implement.The algorithm of the control strategy includes the weak magnetic control of PMSM and the over modulation control of voltage space vector,so that the motor could be controlled in a wide range of speed.In order to verify the control strategy,the simulation model of interior permanent magnet synchronous motor (IPMSM) was built,the experimental platform was built,the simulation and experiment were carried out,and the feasibility and effectiveness of the control strategy were verified by simulation and experiment.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)011【总页数】7页(P26-31,37)【关键词】永磁同步电机;弱磁控制;过调制;控制策略;宽范围带载调速【作者】陈亚爱;陈焕玉;周京华;甘时霖【作者单位】北方工业大学电力电子与电气传动工程中心,北京 100144;北京纵横机电技术开发公司,北京 100081;北方工业大学电力电子与电气传动工程中心,北京100144;国家电网北京市电力公司顺义供电公司,北京 101004【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)转子安装方式可分为表贴式和内置式。
永磁同步电机改进弱磁控制策略
2期
任少盟等: 永磁同步电机改进弱磁控制策略
������43 ������
Te
=
3 2
p[ ψf
+ (Ld
-
Lq ) id ] iq
(2)
Te
=
TL
+
J
dωr dt
+
Bωr
(3)
式中ꎬ udꎬ uq 为定子电压的 dꎬ q 轴的分量ꎻ idꎬ iq 为定子电流的 dꎬ q 轴的分量ꎻ Ldꎬ Lq 为电机在 dꎬ q 轴的电感ꎻ rs 为定子绕组的相电阻ꎻ ωe 为电角速度ꎻ Ψf 为永磁体磁链ꎻ Te 为电磁转矩ꎻ p 为电机极对数ꎻ TL 为负载转矩ꎻ ωr 为机械角速度ꎻ J 为转动惯量ꎻ B 为摩擦系数ꎮ
Abstract: In order to solve the problem in the feedforward flux ̄weakening control of permanent magnet syn ̄ chronous motorsuch as complex calculationꎬ poor stability andbeing sensitive to the parameters of the systemꎬ an improved flux ̄weakening structure which combines feedforward and feedback was proposed to make a bet ̄ ter control performance. The feedforward controller analysed the running state of the motor and calculated the best control current trajectory. The voltage feedback regulator tunes the limited parameter of the voltage lim ̄ ited ellipse in the feedforward controllerꎬ which makes the output current and torque of PMSM more stable during the fluctuation of the direct current bus voltage. The simulation of the PMSM control system was set up in the Matlab / Simulink environment to verify the effectiveness and feasibility of the proposed strategy. Key words: permanent magnet synchronousmotorꎻ flux weakeningꎻ feedforward controlꎻ feedback control
内置式永磁同步电动机弱磁控制策略的研究
2018年10月第36卷第5期西北工业大学学报JournalofNorthwesternPolytechnicalUniversityOct.Vol.362018No.5收稿日期:2017⁃10⁃11基金项目:山西省自然科学基金(2013011035⁃1)资助作者简介:王伟(1991 ),太原理工大学硕士研究生,主要从事电机与电器研究㊂内置式永磁同步电动机弱磁控制策略的研究王伟1,2,王淑红1,张一博3,梁力波11.太原理工大学电气与动力工程学院,山西太原㊀030024;2.国网定州市供电公司,河北定州㊀073000;3.山西省电力公司检修分公司,山西太原㊀030000æèçöø÷摘㊀要:内置式永磁同步电动机采用最大转矩电流比弱磁调速方法时,需要求解一个非线性的高次方程组,来确定交直轴电流的给定值㊂针对这个问题,采用曲线拟合的方法,得到了较精确的电流给定,提高了控制系统的精度㊂同时,在弱磁高速区,提出了一种新的过调制控制算法,通过对电压矢量和相位的优化,实现了不同调制区的自然过渡,提高了逆变器的输出电压,在转速一定的情况下,提升了电机带负载能力;在负载转矩一定的情况下,拓展了永磁同步电机弱磁调速区域㊂关㊀键㊀词:内置式永磁同步电动机;弱磁调速;曲线拟合;过调制;控制器,实验设计中图分类号:TG156㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1000⁃2758(2018)05⁃0970⁃08㊀㊀永磁同步电机具有体积小㊁质量轻㊁功率因数高的特点,因而被广泛应用㊂然而,永磁体产生的磁场固定而不可调节,为了提高同步电机转速,在新能源汽车及伺服驱动系统中,往往需要其运行于弱磁调速状态㊂内置式永磁同步电机弱磁调速采用最大转矩电流比MTPA(maximumtorqueperamperecontrol)控制策略,可以最大程度地利用磁阻转矩,提高同一定子电流下电机的驱动能力㊂但是,该方法在获得d,q轴电流给定值时,需要求解一个非线性高次方程组,该高次方程组无法获得解析解㊂国内外对该问题做了一些研究,文献[1]将迭代法应用到控制策略中,得到需要的d,q轴电流给定,具有一定的工程实用性,但其过程比较复杂,不易数字实现;文献[2]先离散测试电机各个状态下的参数,然后制作成表格,可以实时根据工况查询所需值,但是该方法需要大量存储空间;文献[3]在转矩给定的情况下,利用定步长改变电流矢量角从而改变电流轨迹,但是在变负载时,系统稳定性很难保证㊂采用MTPA控制策略,一方面电流给定较难确定;另一方面,MTPA输出转矩最大点的转速,受到逆变器最大输出电压Usmax的限制㊂为了提高逆变器的输出电压最大值,必须采用过调制的控制策略㊂文献[6]根据电压零矢量作用时间,利用查表法确定调制比,实现了过调制算法,但是该算法需要大量的离线数据㊂文献[7]比较了双模式过调制方法和单模式过调制方法的优缺点,指出了各自适用的场合;文献[8]提出基于三相桥臂坐标系的算法,取消了扇区的概念,简化了计算过程,统一了线性区和过调制区的算法,但文中该方法用在开环控制系统,未对闭环控制系统做进一步研究;文献[9]将最小幅值误差过调制应用在电机闭环控制系统中,虽然方法简单,但考虑因素较少,对电机控制性能有一定影响㊂本文针对MTPA控制策略中,d,q轴电流给定值无法获得解析解的问题,提出了一种多项式曲线拟合的方法求解高次方程组,得到了不同转速要求时的交直轴电流给定值,该方法易于实现,控制精度较高;同时,利用梯度下降法,实现电机从中低速向高速过渡,并在弱磁调速高速区,提出了一种新的过调制算法,根据合成电压矢量的幅值和相角,将电机的调制区分为4个区域:线性区㊁过调制Ⅰ区㊁过调制Ⅱ区和六拍工作区㊂控制系统对合成电压矢量时时监测,可自动实现不同调制区的转换㊂该算法只关注合成电压矢量幅值和相角,目标明确,实现相对容易㊂仿真和实验结果表明,本文所提出的过调制控制方案,使得电机在转速一定的情况下,提升了电第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究机带负载能力,在负载转矩一定的情况下,拓宽了永磁同步电机弱磁调速范围㊂1㊀过调制弱磁控制系统结构永磁同步电机弱磁控制系统结构框图如图1所示,在MTPA弱磁控制策略基础上,采用曲线拟合方法对其进行多项式拟合,得到交直轴电流给定指令,根据梯度下降法对电流指令进行修正,利用过调制控制方案,扩大电机的稳态运行区㊂图1㊀弱磁控制系统结构框图1.1㊀MTPA的曲线拟合方法对永磁同步电机来说,当转矩一定时,理论上转矩曲线上的电流点都可以满足要求,但这些电流矢量中幅值最小的,能够输出同样的转矩,是最优的电流矢量㊂所有的这些点的集合就组成了MTPA曲线,如图2中OA段㊂图2㊀弱磁控制下电压㊁电流㊁转矩轨迹MTPA曲线上的交直轴电流给定值由Te与id,iq关系式决定:9p2(Lq-Ld)2i4q+6pTeψfiq-4T2e=0-ψ2fidLq-Ld⒥+3ψ2fi2d-3ψf(Lq-Ld)i3d+㊀㊀(Lq-Ld)2i4d-4T2e9p2=0ìîíïïïïïïï(1)㊀㊀由(1)式可见,该关系式为二元四阶高次方程组,无法得到d,q轴电流对应的解析解㊂本文对2个高次方程所对应的平面曲线进行拟合,在maltlab环境下,画出约束关系曲线,然后在曲线上取得足够多的点,利用cftool工具箱,得到拟合曲线如图3所示㊂图3㊀MTPA拟合曲线忽略饱和因素带来的影响,所用样机参数:P=2.2kW,UN=380V,IN=4.17A,p=2,Rs=2.69Ω,Ld=0.0632H,Lq=0.1226H,J=0.0153kg㊃m2,nN=1500r/min㊂利用电机参数,可得多项式拟合函数为:iq=-0.005922T2e+0.4735Te-0.01175id=0.0004643T3e-0.01664T2e-㊀㊀0.006372Te+0.005484㊀㊀该拟合曲线的SSE(和方差)为0.0008585,RMSE(均方差)为0.005537,R⁃square(确定系数)为1,表明多项式对高次方程的拟合具有较高的精度㊂1.2㊀过调制控制方法在两电平逆变器中,总共有8个基本电压矢量,这8个电压矢量通过平行四边形法则可以合成任意方向的矢量,但是逆变器输出的电压矢量,终端不能落在空间矢量六边形区域外㊂永磁同步电机弱磁调速时,为了增加电机弱磁调速范围,增大最大输出电压,在高速区电压矢量可能在六边形区域外,此时,可以通过改变给定电压的相角和幅值,使得合成电㊃179㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第36卷压矢量落在正六边形边界上,这种调整就是过调制控制方案㊂本文通过对电压矢量的监测,把调制区分成4个部分:线性调制区㊁过调制I区㊁过调制II区和六拍工作区,过调制原理如图4所示㊂图4㊀过调制原理图1)线性调制区如图4a)和图4b)所示,以O为圆心,OA为半径的圆形区域,为线性调制区,该区域内电压矢量和磁链矢量的轨迹为标准的正圆,所给定电压矢量的幅值小于Udc/3,电机运行于基速以下㊂该区域的特点是:输出电压与给定电压矢量相等,基本电压矢量的作用时间由SVPWM算法决定㊂2)过调制Ⅰ区域如图4a)和图4b)所示,在弱磁调速中,当转速给定值较大时,电压合成矢量U∗的幅值在Udc/3和2Udc/3之间,一旦电压矢量端点落在正六边形之外,实际的输出矢量无法满足要求,故采用相角不变的过调制方式,将U∗调整为U1,用U1代替电压矢量U∗,其端点落在BE上㊂调整后的电压矢量在第一扇区的表达式为公式(2),其他扇区同理:θ=arcos(U∗α/U∗)U1=Udc3cosθ-π6æèçöø÷㊀0<θ<π3ìîíïïïï(2)式中,U∗α和U∗β为给定电压矢量U∗在α轴,β轴的电压分量㊂这种控制算法仅改变了电压矢量幅值,没有改变相位,所以磁链依然接近于圆形㊂3)过调制Ⅱ区如图4a)和图4b)所示,在弱磁调速中,当合成电压矢量U∗的幅值大于2Udc/3且小于4Udc/33,利用幅值变化最小的思想,找出U∗在BE上的投影点,得到最终的电压矢量U2㊂用U2代替电压矢量U∗,其幅值和相角都发生了变化㊂这种控制算法改变了电压矢量的相角和幅值,磁链会产生平行于原磁链的分量,磁链的大小发生变化㊂调整后的电压矢量在第一扇区的表达式为公式(3),其他扇区同理γᶄ=-π3+θ0<γ<π6γᶄ=2π3+θπ6<γ<π3|U∗m|=Udc3sinγᶄ+π3æèçöø÷0<γ<π3ìîíïïïïïïïïï(3)式中θ=arctanUdc3|U∗|cosγ+π3æèçöø÷㊀㊀γ为参考向量U∗与OA之间的夹角,γᶄ为调制后的向量U2与OA之间的夹角㊂4)六拍工作区如图4a)和图4b)所示,当合成电压矢量的幅值大于4Udc/33,即端点落在以4Udc/33为半径的圆外时,用最靠近该矢量的基本电压矢量代替原矢量,逆变器工作在六拍状态,输出线电压的基波幅值达到最大值23Udc/π㊂此时直流母线利用率最高,输出相电压为阶梯波㊂调整后的电压矢量在第一扇区的表达式为公式(4),其他扇区同理:θ=arcos(U∗α/U∗)U=UOB㊀0<θ<π6U=UOE㊀π6<θ<π3㊀ìîíïïïïïï(4)2 过调制弱磁控制系统仿真模型如图2所示,OA为MTPA运行区域,曲线AB段为恒功率运行区域,在OABC包络线范围之内为恒转矩工作区域,曲线BC段id达到限幅值㊂在弱磁低速区,电机沿着MTPA曲线运行,在㊃279㊃第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究弱磁高速区,电流沿着恒转矩方向修正,修正值为:idx=αΔUTd/Tiqx=αΔUTq/T{(5)(5)式中,α为修正系数,ΔU为给定电压与反馈电压的差值,T为转矩的梯度,Td,Tq为T的d,q轴分量㊂在电机整个弱磁运行区域,通过时时监测合成电压矢量的幅值和相角,不同的调制区,采用不同算法进行调制㊂该系统仿真模型如图5所示㊂图5㊀过调制弱磁控制仿真模型3㊀仿真结果及分析3.1㊀过调制对电压矢量的优化在基速以下,电压矢量在线性调制区内,其轨迹为圆形,当转速达到基速时,达到线性调制区内最大值,此时电压矢量的轨迹为正六边形内切圆,如图6所示㊂随着转速的增加,电机的工作状态进入过调制弱磁控制区域,逆变器处于过调制阶段㊂从图7可以看出,电压矢量落在正六边形边界上,过调制给弱磁控制区带来更多的电压余量,增大了电压输出范围㊂图6㊀无过调制的电压矢量轨迹图7㊀有过调制的电压矢量轨迹3.2㊀过调制对系统控制性能的影响3.2.1㊀对输出最大转矩工作点转速的影响随着转矩和电流的上升,电机的稳态工作点沿着MTPA曲线移动,当达到电压极限椭圆和电流极限圆时,所带载能力最大㊂如图8所示,A点是电压极限椭圆,电流极限圆和MTPA三者的交点㊂忽略电机定子电阻压降,该点的转速和转矩为:㊃379㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第36卷ωA=Usmax-(Ld+Lq)C2+8LdCψf16(Lq-Ld)+ψ2f+L2qI2s(6)Te=32p[ψf+(LdA-LqA)idA]iqA(7)式中,C=ψf-ψ2f+8(Lq-Ld)2I2s㊂图8㊀电机稳态运行点由(6)式和(7)式,结合电机参数,可得A点电机稳定运行速度为1644.6r/min,电磁转矩为14.1658N㊃m㊂图9㊀A点转速对比图从图9可以看出,仅采用SVPWM策略,电机带额定负载时,弱磁调速最大转速为1544.5r/min,电机输出线电压基波幅值为529.4V,当加入过调制控制策略时,可以达到给定转速,电机的输出线电压基波达到561.1V㊂在MTPA输出转矩最大点,过调制的引入,提高了逆变器输出电压,扩大了电机弱磁调速范围㊂3.2.2㊀同转速下,电机带载能力的比较电机给定转速为2500r/min,由图10和图11可知,2种策略下的控制系统d轴电流均达到限幅值-4A㊂没有采用过调制的控制系统,线电压基波幅值为530.6V,电磁转矩最大值为7.04N㊃m,运行在B点,采用过调制的控制系统,线电压基波幅值为556V,电磁转矩最大值为8.15N㊃m,运行在C点㊂明显可以看出,在2500r/min的给定转速下,过调制使得电机的输出转矩提升了1.11N㊃m㊂图10㊀电机稳态运行点图11㊀同转速下,带载能力的比较3.2.3㊀不同过调制算法对系统性能的影响只要电压矢量端点落在六边形之外,就可以采用最小幅值误差过调制,但这种方法同时改变了电压的相角和幅值,而本文在一定范围内,只调整幅值,并未改变矢量相角,只有满足一定条件,才会过渡到幅值和相角都改变的阶段㊂如图12和图13所示,在1750r/min的转速下,带10N㊃m负载,曲线1为电机稳态时,仅用最小幅值误差过调制方法下的转速和转矩波形曲线,曲线2为本文方法下的电机转速和转矩波形曲线㊂㊃479㊃第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究可以发现,在同样参数情况下,使用最小幅值误差过调制方法时,电机转速波动为上下0.7r/min,而转矩波动为上下0.4N㊃m;而本文的转速波动为上下0.4r/min,转矩波动为上下0.3N㊃m㊂仿真结果表明,相同转速给定和PI参数的情况下,在达到稳态时,与最小幅值误差过调制相比,本文的转速和转矩波动更小㊂图12㊀转速波动对比图图13㊀转矩脉动对比4 实验结果为了更好的验证本文所提控制方案的正确性与实用性,设计了主回路和控制回路,搭建了2.2kW永磁同步电机实验平台㊂系统采用TI公司的TMS320F2812为控制芯片,采用CAN通信实现下位机与上位机的数据传输,采样频率设定为4kHZ㊂实验平台如下:图14㊀永磁同步电机实验平台直流发电机作为永磁同步电机负载,调节发电机励磁和电枢回路电阻可以调节负载大小㊂实验中保持额定电流不变,通过调节转速指令,可以实现电机不同转速下的运行㊂图15 图17中,在电机额定负载条件下,a)图为未加入过调制图形,b)图为加入过调制图形㊂图15㊀转速对比图图16㊀相电流对比图图17㊀id,iq电流对比图实验表明,无过调制控制策略的情况下,电机以额定电流运行,所能达到的转速为1510r/min,而有过调制控制时,转速为1590r/min,电机转速提高了80r/min㊂实验与仿真相比,起动时间要更长,且速度要比仿真略低,这是因为与理想的仿真模型相比,电压在传输过程中,经过逆变器等设备,会发生电压降落㊂从相电流波形中可以发现,带有过调制的控制策略,启动电流更大,加速性能更好㊂在id,iq的波形中可以看出,两者的稳态值在给定的㊃579㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第36卷MTPA曲线上波动,稳定的直轴电流为-2A,交轴电流为5.4A,电流给定指令精度较高㊂通过控制器,保持电机给定转速2500r/min恒定运行,d轴电流限幅值设定为-4A,在保证PI参数相同的情况下,通过调节负载,使得d轴电流向限幅值趋近,电机达到稳态时,2种控制方式下id,iq波形曲线如图18所示㊂图18㊀同转速下,id,iq电流对比图其中,图18a)和18b)分别为无过调制和有过调制下的d,q轴电流曲线,可以发现,在d轴电流相近的情况下,使用不带过调制控制策略时,q轴电流在1.85A附近波动,使用带过调制的控制策略时,q轴电流在2.2A附近波动,后者比前者提升了0.35A,意味着电机带载能力更强㊂给定电机转速1750r/min,保证直流电机发电机励磁电流和负载电阻相同的情况下,仅用最小幅值过调制和本文所提出的过调制控制方式,稳态转速对比曲线如图19所示㊂图19㊀转速波动对比图其中,图19a)和19b)分别为仅用最小幅值过调制和本文所提过调制控制策略下的稳态转速波形㊂在相同实验条件下,电机达到稳定运行状态㊂使用最小幅值误差过调制方法时,电机转速波动为上下3r/min;而本文过调制方法下的转速波动为上下2r/min,与仅含有最小幅值误差过调制相比,本文的转速波动更小㊂5㊀结㊀论本文在低速弱磁区,对最大转矩电流比采用曲线拟合方法,实现了交直轴电流较准确给定,电机可以稳定地运行在所划定的电流轨迹上㊂同时,提出一种新的过调制控制策略,根据不同调制区,采用不同的方法,通过对电压合成矢量幅值和相角的优化,增加了弱磁区的电压裕度㊂仿真和实验结果表明,采用过调制的弱磁算法与无过调制的弱磁算法相比,增加了电机的带载能力,扩展了永磁同步电机的调速范围㊂参考文献:[1]㊀李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,25(21):172⁃177LiChanghong,ChenMingjun,WuXiaoyi.TheStudyofTheMaximumTorqueperAmpereControlStrategyofPermanentMagnetSynchronousMotorSpeedRegulationSystem[J].ProceedingsoftheCSEE,2005,25(21):172⁃177(inChinese)[2]㊀ConsoliG,ScarcellaG,ScelbaATesta.Steady⁃StateandTransientOperationofIPMSMsunderMaximum⁃Torque⁃per⁃AmpereControl[J].IEEETransonIndustryApplications,2010,46(1):121⁃129[3]㊀Dianov,KimYoung⁃Kwan,LeeSang⁃Joon,etal.RobustSelf⁃TuningMTPAAlgorithmforIPMSMDrives[C]ʊ200834thAn⁃nualConferenceofIEEEIndustrialElectronics,Orlando,FL,2008:1355⁃1360[4]㊀盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30(9):74⁃79ShengYifa,YuShouyi,GuiWeihua,etal.PermanentMagnetSynchronousMotorSystemMagneticFluxControlStrategyforTrackVehicle[J].ProceedingsoftheCSEE,2010,30(9):74⁃79(inChinese)㊃679㊃第5期王伟,等:内置式永磁同步电动机弱磁控制策略的研究[5]㊀吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25(1):58⁃63WuFang,WanShanming,HuangShenghua.AnOver⁃ModulationAlgorithmandApplicationinPermanentMagnetSynchronousMotorFlux⁃WeakeningControlStrategy[J].TransofChinaElectrotechnicalSociety,2010,25(1):58⁃63(inChinese)[6]㊀梁振鸿,温旭辉.应用过调制技术扩展永磁同步电机运行区域[J].电工电能新技术,2003,22(1):39⁃42LiangZhenhong,WenXuhui.ApplyingOver⁃ModulationTechnologytoExtendtheOperatingAreaofPermanentMagnetSyn⁃chronousMotor[J].AdvancedTechnologyofElectricalEngineeringandEnergy,2003,22(1):39⁃42(inChinese)[7]㊀张艳芳,林飞,马志文,等.2种SVPWM过调制方法的比较研究[J].北京交通大学学报,2005(2):39⁃43ZhangYanfang,LinFei,MaZhiwen,etal.ComparativeStudyofTwoMethodsofSVPWMOver⁃Modulation[J].JournalofBei⁃jingJiaotongUniversity,2005(2):39⁃43(inChinese)[8]㊀吴德会,夏晓昊,张忠远,等.基于三相桥臂坐标的SVPWM过调制方法[J].电工技术学报,2015,30(1):150⁃158WuDehui,XiaXiaohao,ZhangZhongyuan,etal.SVPWMOverModulationMethodBasedonThreePhaseBridgeArmCoordi⁃nates[J].TransofChinaElectrotechnicalSociety,2015,30(1):150⁃158(inChinese)[9]㊀范晓坤.永磁同步电动机变频控制系统硬件设计及弱磁调速[D].太原:太原理工大学,2016FanXiaokun.HardwareDesignofVariableFrequencyControlSystemforPermanentMagnetSynchronousMotorandFluxWeak⁃eningSpeedRegulation[D].Taiyuan,TaiyuanUniversityofTechnology,2016(inChinese)[10]WangY,WenX,ZhaoF.AProposedControlStrategyofPmsmforDeepField⁃WeakeningandSquare⁃WaveMode[C]ʊ201215thInternationalConferenceonElectricalMachinesandSystems(ICEMS),Sapporo,2012:1⁃6[11]朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18):67⁃72ZhuLei,WenXuhui,ZhaoFeng,etal.StudyontheMechanismofMagneticFluxLossofPermanentMagnetSynchronousMotorandCountermeasures[J].ProceedingsoftheCSEE,2011,31(18):67⁃72(inChinese)[12]方晓春,胡太元,林飞,等.基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制[J].电工技术学报,2015,30(2):140⁃147FangXiaochun,HuTaiyuan,LinFei,etal.FluxWeakeningControlofPermanentMagnetSynchronousMotorBasedonSingleCurrentRegulatorwithQuadratureAxisandDirectAxisCurrentCoupling[J].TransofChinaElectrotechnicalSociety,2015,30(2):140⁃147(inChinese)StudyonMagneticFluxWeakeningControlStrategyofInteriorPermanentMagnetSynchronousMotorWangWei1,2,WangShuhong1,ZhangYibo3,LiangLibo11.CollegeofElectricalandPowerEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China;2.DingzhouPowerSupplyCompanyofStateGrid,Dingzhou073000,China;3.MaintenanceBranchofShanxiElectricPowerCompany,Taiyuan030000,Chinaæèççöø÷÷Abstract:WhenthemaximumratiooftorquetocurrentstrategyisusedforIPMSMfluxweakeningspeedregula⁃tion,itisneededtosolvenonlinearHigh⁃Orderequationsdeterminingthedirectandquadratureaxiscurrentgivenvalue.Facingthisproblem,thepaperusedthecurvefittingandobtainedthegivencurrent,improvedthecontrolaccuracyofthesystem.Atthesametime,intheweakmagnetichighspeedzone,proposedanewover⁃modulationcontrolalgorithm,whichthroughtheoptimizationofvoltagevectorandphase,achievedanaturaltransitionofdif⁃ferentmodulationregion,increasedtheoutputvoltageoftheinverter,andenhancedthestatorvoltageandoutputtorquewhenmotorrunsatacertainspeedgivenvalue,expandedsteadyweakmagneticregionofIPMSMwhentheloadtorqueiscertain.Keywords:IPMSM;fluxweakeningspeedregulation;curvefitting;over⁃modulation;controller;designofexperi⁃ment㊃779㊃。
永磁同步电机弱磁控制策略仿真研究
永磁同步电机的弱磁控制策略的仿真研究收藏此信息添加:顾光旭来源:1 引言目前,弱磁控制是永磁同步电机研究的又一个热点。
由于材料技术的进展,高剩磁密度br 和高矫顽力hc的永磁材料应用于电机,电机在相当大的程度上已不怕电枢反映的去磁作用,允许在直轴上流过较大的去磁电流。
另一方面为了使电机运行于高速区,拓宽电机系统的调速范围。
在电压型逆变器驱动的电机系统中,电机端电压不可能提高的情形下,减弱电机磁场使电机转速升高的方式—弱磁控制,能够使电机运行在额定转速以上。
在很多牵引和纺织驱动应用处合中,需要恒功率控制和宽调速范围运行,因此,电机的弱磁控制日趋倍受关注。
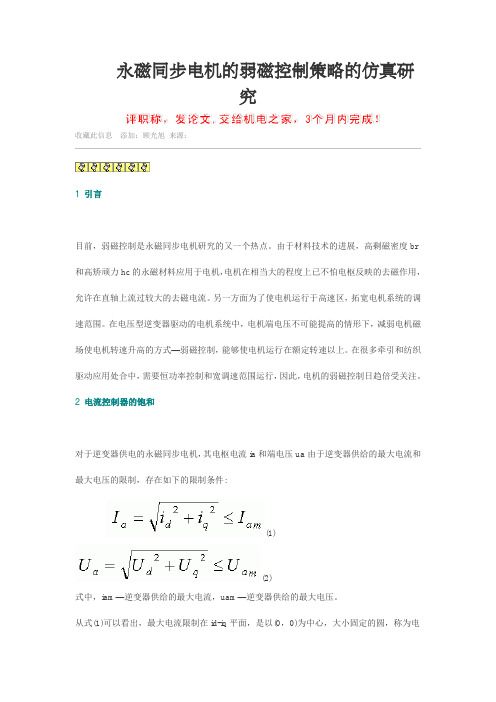
2 电流控制器的饱和对于逆变器供电的永磁同步电机,其电枢电流ia和端电压ua由于逆变器供给的最大电流和最大电压的限制,存在如下的限制条件:(1)(2)式中,iam—逆变器供给的最大电流,uam—逆变器供给的最大电压。
从式(1)可以看出,最大电流限制在id-iq平面,是以(0,0)为中心,大小固定的圆,称为电流极限圆。
最大的电压限制可以用以下方程表示:(3)在id-iq平面上,随着电机转速的提高,最大电压极限是一簇不断缩小,以(-1,0)为中心的椭圆,称为电压极限椭圆。
电流矢量ia必须位于电流极限圆和电压极限椭圆中,否则电枢电流不能跟随给定电流,永磁同步电机的调速性能将下降。
在电机低速运行段,电压极限椭圆较大,电流控制器输出电流能力主要受到电流极限圆的约束,限制了永磁同步电机低速时的输出力矩。
在高速运行段,电压极限椭圆不断缩小,电压极限椭圆成为逆变器输出约束的主要方面,从而限制了永磁同步电机的调速运行范围。
采用弱磁控制可以扩展永磁同步电机的调速范围,在高速段避免电流控制器饱和,即提高高速运行时永磁同步电机矢量控制系统的调速性能。
在永磁同步电机矢量控制系统中,正常转速运行范围内能够采用不同的电流控制策略,采用这些电流控制方法时,随着电机转速的升高,电流控制器很快就会进入饱和。
电动车用永磁同步电机弱磁控制策略研究
电动车用永磁同步电机弱磁控制策略研究苏颖毅【期刊名称】《佳木斯大学学报(自然科学版)》【年(卷),期】2012(000)006【摘要】A layout scheme of the electric drive system of a pure electric vehicle was introduced in this paper.The longitudinal dynamics model of the electric vehicle was built , from which the driving resistance was derived and then transformed to an equivalent resistance torque on the axis of the electric machine .The mathe-matical model of a permanent magnet synchronous machine was built in the two phase rotating reference frame and the motion equation of the electric machine with respect to the driving resistance was given .The necessity of the flux -weakening control was pointed out according to the voltage and current limitations of the three phase in -verter.A surface mounted permanent magnet synchronous machine was chosen and the relative flux -weakening control was put forward.By means of the simulation in Matlab /Simulink it was concluded that the flux -weake-ning control can effectively widen the rotational speed range of the electric machine , which can raise the maxi-mum speed of the electric vehicle.% 介绍了一种纯电动车电力驱动系统布置方案。
永磁同步电机的弱磁控制策略研究
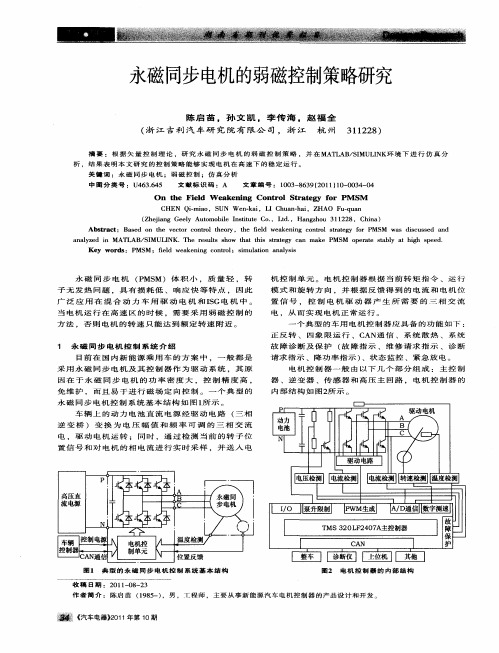
模 式 和 旋 转 方 向 ,并 根 据 反 馈 得 到 的 电 流 和 电 机 位 置 信 号 .控 制 电 机 驱 动 器 产 生 所 需 要 的 三 相 交 流 电 ,从 而 实 现 电 机 正 常 运 行 。
车 辆 上 的动 力 电池 直流 电源经 驱 动 电路
( 相 三
逆 变 桥 ) 变 换 为 电 压 幅 值 和 频 率 可 调 的 三 相 交 流 电 ,驱 动 电 机 运 转 : 同 时 ,通 过 检 测 当 前 的 转 子 位 置 信 号 和 对 电 机 的 相 电 流 进 行 实 时 采 样 。 并 送 入 电
图 1 典 型 的 永磁 同步 电机 控 制 系统 基 本 结 构
收 稿 日期 :2 1 0 — 3 01 — 8 2
图2
电 机 控 制 器 的 内 部 结 构
作 者 简 介 :陈 启 苗
(9 5 , 男 , 工 程 师 , 主 要 从 事 新 能 源 汽 车 电 机 控 制 器 的 产 品 设 计 和 开 发 。 1 8 一)
j 《 车电 》 1 年 0 霉 汽 器 2 1 第1期 o
机 仿 真 。 仿 真 结 果 如 图 9 示 。 从 图 9中 可 以 看 出 , 所
电 机 的 实 际 转 速 很 好 地 跟 踪 了 目标 转 速 , 电 机 的 输 出 转 速 最 后 稳 定 在 60 0 r mi 。 这 说 明 , 加 入 弱 磁 0 / n 控 制模 型后 能够 实现 电机 在高 速 区的稳 定运行 。
永磁同步电机的弱磁控制策略研究
陈 启 营 。 孙 文 凯 。李 传 海 。赵 福 全
永磁同步电机弱磁最优控制策略研究

永磁同步电机弱磁最优控制策略研究GONG Jinbiao;SHI Huoquan【摘要】针对永磁同步电机(PMSM)在恒转矩区起动能力差、在恒功率区电流轨迹不易跟踪等问题,提出基于电压反馈复合电流前馈的定子电流弱磁最优控制策略.通过判断电流前馈环节达到稳定时所需的电流与采用最大转矩电流比(MTPA)算法所得电流大小,使定子电流在恒转矩区通过电流前馈作用快速跟踪MTPA曲线,加快起动;在恒功率区采用电压反馈复合电流前馈的策略,增强系统抗干扰能力的同时最大化直流母线电压利用率.为了验证该策略的可行性,搭建PMSM仿真模型,构建以dSPACE1007为核心的试验平台,对其进行仿真和试验,结果表明了该策略的稳定性和有效性.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)004【总页数】6页(P32-37)【关键词】永磁同步电机;弱磁控制;最大转矩电流比;电压反馈复合电流前馈【作者】GONG Jinbiao;SHI Huoquan【作者单位】【正文语种】中文【中图分类】TM3410 引言内置式永磁同步电机(IPMSM)因其良好的功率密度和工作效率被广泛应用于各种工业场合[1]。
优化的控制策略通过适当控制电流矢量可以实现电机高利用率。
在基速范围内,最大转矩电流比(MTPA)控制策略可以实现铜耗最小化。
在需要宽速度范围运行的应用,比如电动汽车,在弱磁控制策略中利用永磁体励磁,使电机高速稳定地运行在恒功率区[2]。
对IPMSM进行弱磁区控制策略的研究有重要意义。
在传统IPMSM中,不能直接控制磁通量,只能通过去磁效应减弱气隙磁通量d轴电枢反应电流[3]。
通常采用电流前馈、电压反馈或混合弱磁方法扩展永磁同步电机(PMSM)的运行区域。
电压反馈弱磁控制是通过适当的闭环直接控制逆变器输出电压[4]。
文献[5]通过电压反馈研究不同PMSM控制系统在弱磁控制区域的变化,阐释了弱磁控制特性的参数变化以及转矩限制对弱磁控制的影响。
永磁同步电机弱磁失控机制及其应对策略研究

第31卷第18期中国电机工程学报V ol.31 No.18 Jun.25, 20112011年6月25日Proceedings of the CSEE ©2011 Chin.Soc.for Elec.Eng. 67 文章编号:0258-8013 (2011) 18-0067-06 中图分类号:TM 351 文献标志码:A 学科分类号:470·40永磁同步电机弱磁失控机制及其应对策略研究朱磊,温旭辉,赵峰,孔亮(中国科学院电工研究所,北京市海淀区 100190)Control Policies to Prevent PMSMs From Losing Control Under Field-weakening OperationZHU Lei, WEN Xuhui, ZHAO Feng, KONG Liang(Institute of Electrical Engineering Chinese Academy of Sciences, Haidian District, Beijing 100190, China)ABSTRACT: Field-weakening technology is important for permanent magnet synchronous machine (PMSM) control in wide speed range applications. In deep field-weakening operation, saturation of current regulators may lead to losing control and even damages. This paper analyzed the reason why current saturation happens for conventional field-weakening algorithm. It is concluded that precise limitation of d-axis current is necessary to keep the system under control. New control algorithm is proposed to prevent losing control from happening. It is verified by experimental result that the speed range of PMSM is enhanced by the proposed field-weakening algorithm.KEY WORDS: permanent magnet synchronous machine (PMSM); field-weakening; losing control; voltage saturation; d-axis current limitation摘要:弱磁控制技术可以使永磁同步电机实现宽转速范围调速运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
近年来,研究了各种非线性控制器,来解决永磁同步电机非线性的特性。
1.3 直接转矩控制矢量控制方案是一种很有效的交流伺服电机控制方案,但是由于该方案需要进行矢量旋转变换,坐标变换比较复杂。
此外,由于电机的机械常数慢于电磁常数,矢量控制中转矩响应的速度不够迅速。
针对矢量控制的上述缺点,德国学者Depenbrock于上世纪80年代提出了一种具有快速转矩响应特性的控制方案——直接转矩控制(DTC)方案。
直接转矩摒弃了矢量控制中解耦的控制思想以及电流反馈环节,采取定子磁链定向的方法,利用离散的两点式控制直接对电机的定子磁链和转矩进行调节,具有结构简单,转矩响应快等优点[2]。
2.永磁同步电机弱磁控制研究现状弱磁控制是目前PMSM的一个研究热点,电动机减弱磁场就可以实现高速运行(转矩也随之减小),因此,直流电机和感应电机都积极地进行弱磁控制,以便扩展最高转速。
对于PMSM由于转子是永磁体,不能简单通过控制励磁电流实现弱磁控制,可以在抵消永磁体磁通的方向上施加一个励磁性质的电流,实现弱磁控制。
但是,对于永磁体来说,存在着一个如何避免不可逆退磁的问题。
目前,具有高磁能积的永磁材料的实用化,使得PMSM的弱磁控制得以实现,以下是现阶段国内弱磁控制的发展状况。
2.1 从控制角度梁振鸿等人采用过调制技术[3],根据零电压矢量作用时间判断过调制起始点,用查表法确定调制比,提高逆变器直流母线电压利用率,实现对永磁同步电动机弱磁运行区域的扩展。
slligo Morilnoto [4]等人采用电流调节器,实现永磁同步电动机的弱磁控制,电流调节器包括前馈解耦环节和电压补偿环节,定子交轴电流由电机角频率给定值与实际值之间的偏差决定,定子直轴电流由每安培最大转矩控制方案决定。
Jang-Molll kim [5]等人提出了将直流母线电压作为一个反馈量用于电压外环调节的改进方案,从而使系统工作在最大电压利用状态。
控制外环的电压可以确保电流调节器在任何工况下不至于饱和,从而取得较满意的控制效果。
Sozer等人提出了自适应弱磁控制法[6]以克服电流调节器饱和的问题。
Jiunn-Jiang Chen[7]等人将非线性降维状态观测器应用于弱磁控制,从而提高控制系统对电机参数变化的鲁棒性。
2.2 从电机本体角度传统结构的永磁同步电动机弱磁效果较差从结构上看,由于永磁体磁阻率接近于空气,传统结构的永磁同步电动机,其永磁体总是串联在电机的直轴磁路上,等效气隙很大,直轴电抗很小,在正常的电枢电压下,不可能获得很大的直轴电流,因而无法获得满意的弱磁效果。
这就要求寻找特种结构的永磁同步电动机,以适应弱磁运行的要求[8]。
Richard F.Schifcrl、伊华杰等设计了一种复合转子结构永磁同步电动机,从电机的本体上解决了弱磁扩速难的问题。
二、永磁同步电机弱磁控制的控制策略(一)电压极限椭圆梯度下降法弱磁控制文献[9]提出了电压极限椭圆的梯度下降法进行弱磁,该方法主要分为确定弱磁区域和修正电流参考值两部分。
这种方法快速性强,控制精度高,不需查表,实现简单且准确率高,鲁棒性好。
1. 电压极限椭圆和电流极限椭圆u要受逆变器电压极限的制约,于是有定子电压||s2r max s 2qq 2d d 0) ()(⎪⎪⎭⎫ ⎝⎛≤++ωi x i x e u ρ (1) 同样,逆变器输出电流的能力也要受其容量的限制,定子电流也有一个极限值,即m ax s s i i ≤ (2)若以定子电流矢量的两个分量表示,则有2max s 2q 2d i i i ≤+ (3)由上式构成了电压极限椭圆和电流极限圆,如图1所示。
图中,电流极限圆的半径为1,即设定s max i 等于额定值。
由式(1)可以看出,电压极限椭圆的两轴长度与速度成反比,随着速度的增大便形成了逐渐变小的一簇套装椭圆。
因为定子电流矢量s i 既要满足电流极限方程,又要满足电压极限方程,所以定子电流矢量s i 一定要落在电流极限圆和电压极限椭圆内。
例如,当r r1ωω=时,s i 要被限制在ABCDEF 范围内。
图1 电流极限圆和电压极限圆2. 弱磁区域的确定永磁同步电动机运行过程中的电流、电压轨迹如图2所示。
根据运行情况,可划分为两个弱磁区域:1) 弱磁区域I 。
定义电磁转矩与产生其所需的电流的比为转矩电流比。
基频以下电动机恒转矩运行,采用线性最大转矩电流比控制,如图中OA 所示; 最大转矩电流比曲线和最大转矩电压比曲线之间的区域称为弱磁区域I 。
2) 弱磁区域 II 。
在基频以上,电动机沿着 MT-PV 曲线运行,称为弱磁区域 II 。
图2 永磁同步电动机运行过程中的电流、电压轨迹3. 系统结构框图图3为永磁同步电动机调速系统结构框图。
虚线部分为电流修正值计算模块。
速度指令信号与检测到的转子速度信号相比较,经速度控制器的调节,输出电磁转矩Te 指令信号,经MTPA 模块后输出d 、q 轴电流1d i 、1q i 作为指令信号。
dx i 、qx i 分别为 d 、q 轴的电流修正值。
图3 永磁同步电动机调速系统结构框图4. 基于梯度下降法的内埋式永磁同步电机弱磁控制策略内埋式永磁同步电机(IPMSM)由于结构上的特点使其在性能上有很多突出的优点,如高功率密度、高功率因数、结构紧凑、调速范围宽等,正是由于这些优点使其广泛应用于家用电器、交通运输、磁盘驱动器以及机床、机器人等数控系统。
轨道交通和电力牵引传动系统要求电机在速度较低的时候能够输出比较大的转矩,这样可以满足起动、加速、低速爬坡等要求,除了对基速以下的一些要求外,还要求在速度范围上能够更加宽广,这就对电机的弱磁性能提出了要求,要求其调速的范围大。
内埋式永磁同步电机由于存在结构转矩,比较容易弱磁,且输出转矩大,因此对内埋式永磁同步电机的研究具有重要的意义[10]。
基于梯度下降法的弱磁控制算法,不需要查表,控制精度高,响应速度快,且鲁棒性好。
具体算法描述如下。
内埋式永磁同步电机运行过程中电流、电压轨迹曲线如图4所示。
基速以下,电机运行在恒转矩区域,采用线性最大转矩电流比(MTPA)控制可以使永磁同步电机获得最大的电磁转矩[11],如图中OA 曲线所示。
随着转速的升高,电机将沿着最大转矩电流比曲线OA 和最大转矩电压比(MTPV)曲线BC 之间的恒转矩曲线运行,即为弱磁区域I(FWRl)。
在更高的转速范围,电机沿着MTPV 曲线BC 运行,即上述弱磁区域2(FWR2),如图2所示。
对于给定参考转矩瓦,随着转速的升高,电机沿着恒转矩曲线DE 运行,到达E 点之后,如果转速继续升高,电机将沿着MTPV 曲线EC 运行,其输出转矩逐渐减小M 。
在弱磁过程中,最主要的是确定设定电流修正值的大小。
首先根据电机的运行曲线确定其所在的弱磁区域(FWRl 、FWR2),再根据所在的弱磁区域,对电流设定值进行相应的修正。
(二)采用改进的超前角控制弱磁增速超前角弱磁控制算法是目前较为常用的弱磁控制方法[12]。
运用该算法控制表贴式永磁同步电机运行于弱磁区时,随着负载的增加,通常会出现如下问题: 从恒转矩区到恒功率区的过渡过程中,出现较大的电流震荡,从而引起速度波动,系统的动态性能变差。
而在恒功率区,会出现稳态速度下降的现象,稳态时的速度和电流波动也会变大,系统的稳态性能不佳。
1. 表贴式永磁同步电机数学模型及传统超前角弱磁控制算法d -q 轴系下表贴式永磁同步电机定子电压方程为[13]d s d d d r q q d u R i L i L i dtω=+- q s q q q r d d r f d u R i L i L i dtωωψ=+-+ (4) 式中:d L 和q L 分别为直轴和交轴同步电感,且d L =q L ,s R 为定子相电阻,r ω为转子的电角速度,f ψ为转子永磁体产生的励磁磁场的基波磁链。
电机高速稳定运行时,忽略定子压降,电压方程可以改写为d iq r d d r f u L i ωωψ=+ (5)电机定子电压s u =由式(5)可得s r u ω= (6) 由式(6)可以看出,当电机定子电压达到逆变器的输出极限时,为了使转速r ω升高,只能通过增加直轴去磁电流分量d i 和减小交轴电流分量 q i ,以维持电压平衡,达到弱磁调速的目的。
图4为传统超前角弱磁算法的控制框图,其基本原理为:以电流环的输出值作为电压 PI 调节器的输入控制量,与给定电压 max U 之间的差值通过电压PI 调节器来控制电机定子电流矢量与 q 轴之间的超前角 β。
max U 为/3dc U ,其中dc U 为逆变器直流母线电压。
当 s u 低于 max U 时,由于饱和环节的作用,PI 调节器处于正向饱和,输出电流超前角β=0,此时d i = s i ,sin β= 0,电机运行在恒转矩区。