整车硬件在环(HIL)测试系统软硬件介绍
HiL系统简介
HiL系统简介HiL(Hardware-in-the-Loop)硬件在环仿真测试系统是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的ECU连接,对被测ECU进行全方面的、系统的测试。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,减少了实车路试的次数,缩短开发时间和降低成本的同时提高ECU的软件质量,降低汽车厂的风险。
在新能源汽车这个全新的领域中,HiL硬件在环仿真测试对于三大核心电控系统:整车控制系统、BMS电池管理系统、MCU电机控制器是非常重要的。
但其高精度的实时性要求、大电压大电流的安全性、信号接口的特殊属性、以及系统的可扩展性都使得传统汽车电控系统的HiL硬件在环仿真测试系统无法解决。
意昂科技与欧美业内专业公司建立了合作伙伴关系,为国内汽车行业客户提供新能源的HiL硬件在环仿真测试解决方案。
意昂科技负责整套HiL系统的设计、制造、集成、初验收、安装调试、终验收和售后服务等,实施交钥匙工程。
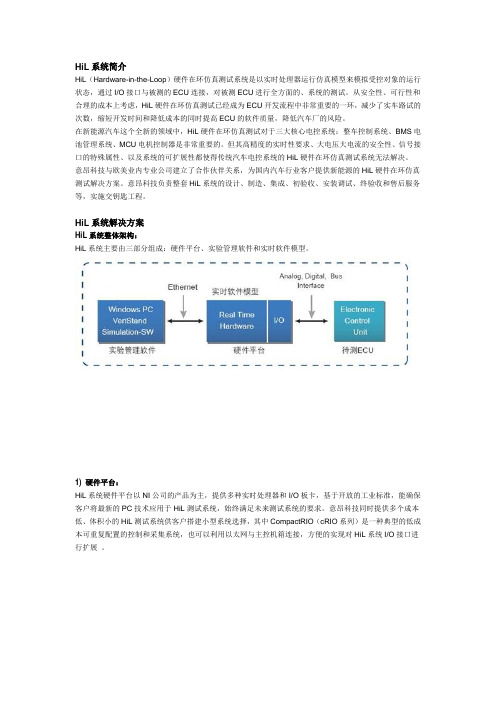
HiL系统解决方案HiL系统整体架构:HiL系统主要由三部分组成:硬件平台、实验管理软件和实时软件模型。
1) 硬件平台:HiL系统硬件平台以NI公司的产品为主,提供多种实时处理器和I/O板卡,基于开放的工业标准,能确保客户将最新的PC技术应用于HiL测试系统,始终满足未来测试系统的要求。
意昂科技同时提供多个成本低、体积小的HiL测试系统供客户搭建小型系统选择,其中CompactRIO(cRIO系列)是一种典型的低成本可重复配置的控制和采集系统,也可以利用以太网与主控机箱连接,方便的实现对HiL系统I/O接口进行扩展。
硬件平台主要组成部分:实时处理器、I/O 接口、故障注入单元(FIU), 通信接口、FPGA模块、负载模拟单元、信号调理单元、可编程电源、机柜和分线箱等。
2) 实验管理软件:HiL系统实验管理软件平台以NI VeriStand 2010 为核心组建,与实时处理器通过以太网连接,配合LabVIEW, FPGA Module,Real Time Module及其他丰富的功能扩展包,用户可进行:硬件配置管理自主更新硬件资源升级系统功能从Simulink等第三方建模环境中导入控制算法或系统模型提供测试命令创建可视化交互界面灵活修改用户界面配置激励生成事件警报完成测试自动化记录数据自动分析数据和生成报告等3) 实时软件模型:HiL系统实时软件模型主要包括:HiL系统采用开放的硬件平台,支持多种仿真模拟软件:发动机模型 Matlab/Simulink/Stateflow/RTW电池模型 LabVIEW Control Design and Simulation电机模型 Tesis enDYNA/veDYNA传动系统模型 CarSim/TruckSim驾驶员模型 GT-POWER车辆动力学模型 AMESim路面及环境模型等HiL系统主要特点:真正开放式的软硬件平台,支持第三方硬件,系统升级与扩展方便支持C, C++, Matlab/Simulink, LabVIEW, DLL等多语言环境实时高精度数据采集和数据多速率采样全球服务、支持与专业的合作伙伴方便集成第三方HiL产品- 电池模拟(DMC)- 电机仿真(OPAL-RT, SET)- 发动机仿真(MicroNova)交钥匙服务。
刹车油门与加速度 标定方法

刹车油门与加速度标定方法标题:刹车油门与加速度:标定方法详解在汽车工程领域,确保刹车油门与加速度之间的精确标定至关重要。
这不仅影响驾驶体验,还直接关系到行车安全。
本文将详细介绍刹车油门与加速度的标定方法,帮助您深入了解这一技术领域。
一、标定背景刹车油门与加速度的标定是汽车研发过程中的关键环节。
通过对刹车油门与加速度之间的关系进行精确调整,可以使汽车在不同工况下实现理想的加速和制动性能,提高驾驶舒适性和安全性。
二、标定方法1.硬件在环(HIL)测试硬件在环测试是一种将实车硬件与仿真环境相结合的测试方法。
在进行刹车油门与加速度标定时,可以通过以下步骤进行:(1)搭建测试平台:将实车的刹车油门踏板、刹车系统、发动机等硬件与仿真器连接。
(2)建立仿真模型:根据实车参数和工况,建立相应的仿真模型。
(3)进行测试:通过实车踏板输入,模拟不同工况下的驾驶行为,实时监测并调整刹车油门与加速度之间的关系。
2.软件在环(SIL)测试软件在环测试是在纯仿真环境下进行的标定方法。
具体步骤如下:(1)建立数学模型:根据实车参数和工况,建立刹车油门与加速度之间的数学模型。
(2)编写仿真代码:利用仿真软件(如MATLAB/Simulink)编写仿真代码。
(3)进行仿真测试:模拟不同工况下的驾驶行为,调整模型参数,实现刹车油门与加速度之间的精确匹配。
3.实车测试实车测试是验证标定效果的关键环节。
在进行实车测试时,应注意以下几点:(1)选择合适的测试场地:确保测试场地具备不同工况,如直线加速、制动、坡道等。
(2)准备测试设备:使用专业设备(如数据采集器、踏板力传感器等)进行实时数据采集。
(3)进行测试:按照预定的测试工况进行驾驶,收集刹车油门与加速度之间的数据。
(4)数据分析:对收集到的数据进行分析,根据实际驾驶感受和性能指标调整标定参数。
三、总结刹车油门与加速度的标定是汽车工程领域的关键技术。
通过硬件在环测试、软件在环测试和实车测试相结合的方法,可以实现刹车油门与加速度之间的精确匹配,从而提高驾驶舒适性和安全性。
NI HIL介绍
数学模型 + I/O
闭环系统
期望响应
控制器 (UUT)
控制信号
受控对象
实际响应
受控对象的仿真系统
被控对象模型仿真 + 测试系统
用户界面
激励 测试序列
数据记录/ 分析
待测对象: 控制器
控制 信号 期望输出
环境扰动
被控对象模型
实际输出
实际输出
HIL测试系统的基本硬件架构
上位机
Ethernet
军工与航空航天
航空发动机模型 无人飞行器模型 水下探测器模型 …… • • • •
能源、电力
发电机及电力电子器件 风机模型(包括机械部分) 涡轮机模型 ……
闭环控制系统
控制器
期望响应 控制信号
受控对象
实际响应
控制器设计
受控对象的特性
基于模型的控制器设计流程
Kc Kp
设计/建模 (MIL)
系统测试
利用NI VeriStand的开放性
可调用多种环境下建 立的模型
通过NI LabVIEW自定义NI 通过LabVIEW FPGA模块 VeriStand的用户界面 自定义板载FPGA功能
支持使用Python编辑 的测试序列
结合NI TestStand进 行测试管理
结合NI DIAdem进行 数据管理
• 希望缩短开发周期,降低开发风险和成本
– 受控对象的生产设计与控制器开发同步进行
应用举例: 发动机ECU测试
• 油门踏板开度
• 发动机凸轴和 曲轮轴信号
发动机控制器(ECU)
• 喷油信号 • 点火信号
发动机仿真系统
应用举例: 整车模型仿真
智能驾驶hil测试 的理解
智能驾驶hil测试的理解一、什么是智能驾驶HIL测试智能驾驶HIL测试啊,就像是给智能驾驶系统做一场超级严格的模拟考试呢。
HIL其实就是硬件在环(Hardware - in - the - Loop)的简称。
咱们可以把智能驾驶系统想象成一个即将上路的新手司机,那HIL测试就是在一个模拟的环境里,看看这个新手司机能不能应对各种各样的路况和突发情况。
这个测试可重要啦。
比如说,智能驾驶系统得能准确识别路上的交通标志吧。
在HIL测试里,就可以模拟出各种交通标志出现的场景,看看系统是不是能准确识别。
再比如说,遇到突然冲出来的小动物或者行人,系统得能及时做出反应,是刹车呢还是避让。
在这个测试里,就能通过模拟这样的场景来检验系统的性能。
二、智能驾驶HIL测试的组成部分1. 测试设备这就像是考试的监考老师和考场设施呢。
它包括各种传感器模拟器,用来模拟车辆周围的环境信息。
比如说,模拟摄像头看到的画面,模拟雷达探测到的距离等等。
还有数据采集设备,就像是记录考生表现的小秘书,把测试过程中的各种数据都记录下来,这样后面才能分析系统哪里做得好,哪里还需要改进。
2. 测试软件这个软件就像是考试的试卷题目啦。
它能够设定各种各样的测试场景,从简单的直线行驶,到复杂的交叉路口、环岛行驶等等。
而且这个软件还能设置不同的天气状况,像大晴天、下雨天、下雪天,因为天气对智能驾驶系统的影响也很大呢。
三、智能驾驶HIL测试的意义1. 安全保障智能驾驶可是关系到我们大家在路上的安全呀。
通过HIL测试,可以在系统真正上路之前,就发现很多潜在的安全隐患。
就好比一个战士,在出征之前要经过严格的训练和模拟战斗,这样才能在真正的战场上更好地保护自己和战友。
如果没有这个测试,智能驾驶系统带着各种小毛病就上路了,那可太危险啦。
2. 成本节约开发一个智能驾驶系统可是要花好多钱的呢。
要是直接把没有经过充分测试的系统装到车上,然后在实际道路上测试,万一出了问题,那不仅车辆可能会损坏,还可能造成其他的损失。
硬件在环hil简介.

35
>> drive_hard_stop
36
Torsional Spring-Damper
扭转弹簧减震器模型代表 用扭转弹簧连接的两段轴 的传动 参数:
刚度 阻尼 初始偏移量 自由行程
示例 >>drive_spring
37
Torsional Spring-Damper原理
车的质量(m) 质心的位置 (m) 迎风面积 (m2)
空气阻力系数Cd 车在水平方向山的初速度(m/s)
46
车辆纵向动力学原理
47
示例 >>drive_4wd_dynamics
48
建立SimDriveline 模型的一般步骤
确定转动惯量 确定传动约束(gears) 确定传动连接件(如离合器) 确定系统的扭矩输入和运动输出 确定求解方式 运行,观察结果
27
Controllable Friction Clutch 可控摩擦片式离合器
这是一个用压力信号控制的包含 动摩擦和静摩擦的摩擦片离合器 模型 工作模式可分为两种(双向和无 方向) 离合器工作的三种状态:
Unengaged Engaged (but not locked) Locked
43
引擎的原理 τ = T·g(Ω) g(Ω)=60/2/pi*P (Ω)/n P(Ω)=p0+p1*n+p2*n2 +p3*n3
44
轮胎
轮胎模型是整个传动系的 结束端 输入量为汽车在垂直方向 的负荷Fz和行使方向的速 度Vx;输出量为车轮的转 速Ω和纵向牵引力Fx 参数为:
Torque Actuator是扭矩施加 模块。连接从simulink 传递 来的扭矩 Torque Sensor是扭矩传感 器B是驱动端F是被动端, Tor为扭矩向simulink 输出端 口 同理有Motion Actuator和 Motion Sensor IC模块定义了转动件的初始 转速(rad/s)
转向系统硬件在环(HIL)测试台架解决方案
转向系统硬件在环(HIL)测试台架解决方案一、背景汽车转向系统作为汽车底盘四大系统之一,从传统的液压助力转向系统(HPS)逐渐发展到现在的电动助力转向系统(EPS)。
在伺服电机和大量辅助系统支持下,已不再单纯的用于转向目的,随着智能驾驶技术的发展,ADAS/AD系统也离不开EPS的参与,例如LKAS、智能纠偏避障控制等一系列功能的实现。
随着越来越多软件功能集成,新的驾驶辅助系统的加入,极大的增加了对转向系统的稳定性,高性能开发测试的需求。
基于HiL的转向系统测试台架可以实现实车试验条件下难以达到的测试条件,比如安全保障、外部环境条件、边界极限,事故重现和故障注入等。
基于HIL的转向系统测试台架,可以在整车试装前高效重复调试转向系统性能,测试更加接近实车,从而加快我们的开发测试流程和效率。
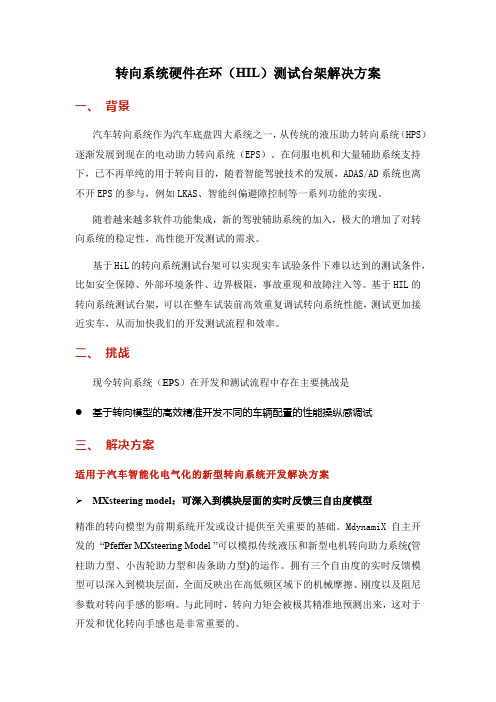
二、挑战现今转向系统(EPS)在开发和测试流程中存在主要挑战是●基于转向模型的高效精准开发不同的车辆配置的性能操纵感调试三、解决方案适用于汽车智能化电气化的新型转向系统开发解决方案➢MXsteering model:可深入到模块层面的实时反馈三自由度模型精准的转向模型为前期系统开发或设计提供至关重要的基础。
MdynamiX自主开发的“Pfeffer MXsteering Model ”可以模拟传统液压和新型电机转向助力系统(管柱助力型、小齿轮助力型和齿条助力型)的运作。
拥有三个自由度的实时反馈模型可以深入到模块层面,全面反映出在高低频区域下的机械摩擦、刚度以及阻尼参数对转向手感的影响。
与此同时,转向力矩会被极其精准地预测出来,这对于开发和优化转向手感也是非常重要的。
该转向模型已经在dSPACE ASM,、IPG CarMaker 和 VI-CarRealTime 的整车模型中运用。
用户也可以集成在 MATLAB/Simulink 中与其他模块比如个性化的ECU 控制系统集成或者结合ADAS 控制系统进行仿真试验。
发动机ECU 硬件在环(HIL)测试方案
发动机ECU硬件在环(HIL)测试解决方案一、 方案概述1.1 HIL测试系统概述随着汽车电子技术的不断革新和迅速发展,汽车电控单元数量的不断增加,汽车电子产品和技术在各种车型中得到了越来越多的应用,其中,汽车电子系统成本约占到整车的30%,而汽车故障的产生多发生在汽车电子系统,因此,从安全性、可行性和成本上考虑,硬件在回路(HIL)测试已经成为电控系统开发和应用中非常重要的一环,减少实车路试,缩短开发时间并降低成本的同时提高电控系统的软件质量,降低电控系统开发和应用的风险。
HIL(Hardware‐in‐the‐Loop)硬件在回路测试系统是以实时处理器中运行的实体仿真模型来模拟受控对象的运行状态,通过I/O接口与被测电控系统连接,对被测ECU进行全方面的、系统的测试。
系统原理如图1.1中所示。
图1.1 HIL测试系统原理HIL测试系统的特点:●模拟被控对象的各种工况,包括极限工况;●模拟复杂的故障模式,快速复现故障模式;●将部分测试过程从传统试验台架中分离;●自动化测试并生成测试报告,缩短测试周期;●易于维护和扩展测试能力。
1.2SimCar硬件在环测试系统简介SimCar硬件在环(HIL)测试系统是用于测试电控单元功能、系统集成和通信的一套完整的硬件在环仿真测试设备,可用于汽车、航空、兵器、工程机械等领域。
基于SimCar硬件在环测试系统针对用户的被控对象进行建模仿真,并将其运行于跟控制器闭环工作的实时系统中,实现对汽车电控单元的复杂测试。
SimCar硬件在环仿真系统主要由三部分组成:仿真硬件平台、试验管理软件及车辆实时仿真模型。
系统组成示意图如图1.2中所示:图1.2 SimCar测试系统组成SimCar支持的电控单元硬件在环测试:发动机ECU;自动变速器TCU;混合动力整车控制器HCU;纯电动汽车VCU;蓄电池管理系统BMS;汽车防抱死制动系统ABS;车身控制器BCM;二、 基于SimCar的发动机ECU测试解决方案2.1 发动机ECU测试系统原理如图2.1发动机ECU测试系统原理中所示,在试验定义中,上位机试验管理软件运行于PC机环境中,通过PC机通信口与SimCar实时仿真平台通信,汽车实时仿真模型运行在仿真平台的实时处理器中,运行于处理器中的模型I/O通过仿真平台中的集成的信号调理、负载仿真及功率驱动等硬件与实际的发动机ECU构成闭环连接,实现发动机ECU的系统测试。
整车硬件在环(HIL)测试系统软硬件介绍
代码自动生成,与Matlab的无缝连接 直接访问实时系统 图形化显示,实时在线设计和调整
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
• RTI/RTW的使用
Simulink框图
RTI: 硬件接口程序
RTW: 代码自动生成
dSPACE控制板
选择对应的 编译方法
生成*.sdf文件
Block reduction 设置为“Off”
• 一些注意点
• Simulink中的“Fcn”模块不能使用 • 其它工具箱中的模块多不能使用(DSP工具
箱中的“Filtering”模块可用) • 仿真参数设置窗口中的“Block reduction”一
定设置为“Off” • 编译出现RTI错误,可尝试新建*.mdl文件 • AutoBox开启状态下,编译完成后会自动下载
菜单栏
工具栏设置菜单 (右键点击工具栏)
工具栏
浏览器
视窗
虚拟仪器
工具窗口 状态栏
• 常用工具
• 日志观察器(Log viewer)
– 观察ControlDesk的行为 – 错误信息
工具窗口
•常用工具
• 平台浏览器(Platform manager)
– 设置与硬件的连接,创建/清除平台注册文件 – 浏览平台,控制实验过程 – 下载*.sdf文件
代码;否则仅生成*.sdf文件
• RTI的高级应用 • 中断处理(软件和硬件中断) • 定时器的调用 • 多任务的处理 • 非周期系统的处理(触发和使能系统)
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
硬件在环仿真(HIL):NI领先汽车测试关键之匙
硬件在环仿真(HIL):NI领先汽车测试关键之匙美国国家仪器有限公司(National Instruments, 简称NI)于日前参加了在上海光大会展中心举办的2015年汽车测试及质量监控博览会。
在此次博览会上,NI联合多家业内合作伙伴,集中展示了NI为汽车行业提供的灵活开放式的测试平台与多样化的解决方案。
2015年是汽车测试及质量监控博览会举办的第十个年头,它已确立为向中国汽车工业展示确保质量、可靠性、耐久性和安全性的各种技术与服务的行业内头号展会。
会上逾280家公司展示了自己的新产品,具体领域包括:发动机/排气测试;车辆动力学测试;材料测试以及碰撞测试等。
NI也借助此次盛会向企业及大众展示了NI 在汽车行业的技术优势与优质解决方案。
据了解,现今几乎所有的汽车OEM与一级供应商在各类测试应用中均有使用或集成了NI产品。
通过为控制、设计和测试提供通用平台,NI 帮助用户节省了在汽车研发到生产各个阶段耗费的成本和时间。
凭借业内领先的I/O、灵活现成的硬件、强大高效的LabVIEW开发环境,用户可以创建适合各种应用的解决方案。
目前NI的产品在汽车行业涉及了车载测试和数据记录、硬件在环仿真、台架测试与控制、快速控制原型、生产线测试、车载信息娱乐系统测试等几大应用。
此次博览会上,NI着重展示了其业内权威的硬件在环仿真(HIL)技术方面的应用。
NI通过其创新的低成本模块化硬件和软件平台帮助工程师和科学家设计并建立自己的HIL系统。
硬件在环HIL仿真技术可以使用NI PXI实时控制器运行仿真模型来模拟受控对象的运行状态,配合NI FPGA模块可适应更高动态特性及更高精度的模型应用需求。
NI硬件在环测试平台具有开放的软硬件技术架构,可以减少工程师的开发时间、成本和风险。
在支持第三方硬件和软件建模工具的同时,NI还提供一系列高性能模拟和数字I/O设备,CAN、LIN和FlexRay总线接口,故障注入硬件等硬件,让客户可以高效实现应用。
插电式混合动力整车控制器硬件在环测试系统
10.16638/ki.1671-7988.2017.05.024插电式混合动力整车控制器硬件在环测试系统李根深1,王静2,田苗1(1.奇瑞汽车股份有限公司,安徽芜湖241009;2.万里扬乘变公司,安徽芜湖241006)摘要:以dSPACE公司的仿真机柜——MidSize为基础,从方案设计、设备连接、软件应用、系统配置、测试用例编制等方面详细介绍了整个测试系统搭建过程。
该测试系统具备CAN网络测试、功能性测试、I/O测试,故障模拟、系统验证等功能。
经过系统测试,帮助解决了混合动力整车高压系统故障,证明了该硬件在环测试系统满足设计需求。
关键词:插电式混合动力;硬件在环;整车控制器;测试中图分类号:U463.7 文献标识码:A 文章编号:1671-7988 (2017)05-72-04Hardware in the Loop Test System of Hybrid Control Unit for Plug-inHybrid Electric VehicleLi Genshen1, Wang Jing2, Tian Miao1(1.Chery Automobile Co., Ltd, Anhui Wuhu 241009; 2.Wuhu Wanliyang Transmission Co., Ltd., Anhui Wuhu 241009)Abstract: Base on the MidSize of dSPACE company, This article introduces the building process of hareware in the loop test system, including designing, equipment connecting, software application, system configuration, test case writing and so on. This system can do the CAN test, function test, I/O test, fault simulation test, system validation and so on. It has helped to solve the high voltage system fault of PHEV successfully. It is proved that this test system satisfied the requirement of design. Keywords: PHEV; HiL; HCU; TESTCLC NO.: U463.7 Document Code: A Article ID: 1671-7988 (2017)05-72-04前言随着汽车技术的发展和普及,汽车保有量越来越多,其导致的环境问题也日益突出。
BMS HIL介绍
BMS HIL介绍
BMS HIL测试系统是基于HIL技术的车辆仿真测试平台,主要实现电池模型及整车模型的是实时运行,模拟BMS控制器的输入信号,采集BMS控制器的输出和必要的输入信号,实现BMS对实时模型的闭环控制,并完成BMS HIL系统集成调试工作。
BMS HIL测试系统具有以下主要功能:
➢能够仿真电池工作状态及整车工况,可实现BMS的功能测试;
➢基于图形化操作软件,可实现手动测试、自动测试等功能测试;
➢经过硬件、模型的简单配置后可实现其他类似变型控制器的测试;
➢系统基于模块化设计,具有较好地扩展性;
BMS HIL测试系统可支持如下测试:
➢采集单体电压、多点温度、总电流、母线电压,蓄电池电压等;
➢估算SOC,估算电池老化状态,对充放电进行功率限制,电池热管理控制;
➢具有故障注入功能,可实现对BMS的故障诊断测试;
➢具有CAN通讯仿真功能,可实现BMS的通讯测试;
➢故障诊断及安全保护策略;
➢测试验证被动均衡、主动均衡功能;
➢HVIL互锁信号检测;
➢绝缘电阻检测;
➢热管理仿真;
➢CAN通信收发;
➢控制系统的各个模式转换,进行自检,预充电控制,主回路上下电控制,记录关键数据等。
➢满足国标的快充和慢充功能测试。
BMS HIL测试机柜组成:
1.电源管理模块
2.NI实时仿真机
3.电池模拟设备
4.信号调理箱
5.低压可编程电源
6.高压可编程电源
7.高压绝缘电阻模块
8.断线测试箱BOB
9.机柜。
硬件在环的整车控制器功能安全测试技术分析

车辆工程技术64车辆技术 汽车行业不断提升了电气化和智能化水平,也逐渐丰富了汽车的功能,不断增加电控单元,导致车辆电子电气系统变得更加复杂,因此增加了潜在安全隐患,因此企业也更加重视基于功能安全的开发理念,开始注重开发利用各种电控单元。
再加上当前能源问题越来越严峻,也因此推动了新能源汽车的发展。
整车控制器负责协调汽车的运行过程,因此属于汽车的核心零部件,我国整车企业需要合理开发整车控制技术。
硬件在环测试是整车开发流程中的重要环节,并且在各种ECU开发工作中广泛推广利用,在整车控制器量产前需要开展硬件再还测试。
在电动汽车中,整车控制器发挥着重要的作用,可以保障汽车的安全性,在整车控制器开发阶段需要保障功能安全性。
当前我国很多厂商已经可以生产出符合标准的产品。
本文分析了硬件在环的整车控制器功能安全测试技术,通过整车控制器研究硬件再换测试方法。
1 概述功能安全标准ISO26262 电气系统功能安全基本标准为ISO26262,主要是针对道路车辆功能安全制定的标准,可以在汽车整个生命周期中利用。
我国在2018年发布第二版ISO26262标准,扩宽了车辆适用范围,并且在ISO26262标准中增加了半导体功能安全应用方针。
ISO26262中提出功能安全管理体系,以此作为安全生命周期[1]。
开发电控单元的过程中,需要开发安全生命周期。
在开发初期,需要分析和评估目标系统的危险和风险(HARA),因此明确汽车安全完整性等级(ASIL),根据安全完整性等级设定安全目标。
确定汽车安全完整性等级,需要综合考虑严重度和暴露率以及可控性三个要素。
在产品开发过程中,ISO26262标注也提出了严格规定要求,并且针对不同级别的测试方法提出了针对性的参考。
本文主要验证研究VCU软件功能,开展软件集成测试,无需深入分析其他级别测试,ISO26262标准对于软件集成测试提出了具体的要求。
根据下图可以明确,针对HIL测试环境,强烈推荐ASIL C和ASIL D等级安全目标的测试,建议使用ASIL C和ASIL D。
HIL测试系统方案
被控对象实时仿真模型 配套的试验和测试软件 工程服务
系统集成的工程服务(界面、信号列表、线束制作、 自动测试等)
测试用例和自动测试库开发
HIL系统组成
CAN, LIN 9功能日益复杂——单个动力系统的控制软件超过2万行的代码 9 与供应商共同进行研发——责任的分担
HIL测试需求
汽车故障分布
电子电气系统
点火系统 * 发动机
散热器/冷却系统 车轮或轮胎 燃油系统 喷射系统 *
齿轮/变速箱 底盘 * 其他
32.1%
14.0%
11.7%
8.2%
7.0%
ECU测试
ECU 功能测试
测试单个ECU 软件集成测试 验收和发布测试
测试ECU网络 测试分布式功能 测试网络系统
• 功能设计 • 控制策略 • 诊断程序 • ECU开发
• 全部的运行范围 • 临界的运行状态 • 诊断功能 • 基于试验驾驶的测量数据 • Residual bus 仿真
• “相互作用” • 总线的行为 • 网络管理 • 功率消耗 • 集成测试
9政府法规的日益严格(降低
排放)
Code M e m o ry [KByte ]
600 500 400 300 200 100
0 1985
1990
1995
2000
2005
背景一整车测试所面临的挑战
9 如何测试复杂的整车网络
日益增加的ECU数量: 20~50 复杂的网络拓补结构:CAN ,LIN ,MOST……
试验 管理软件
整车硬件在环(HIL)测试系统软硬件介绍 ppt课件
ppt课件
CAN接口多,其它接口较少 电源:20W,6-40V 温度范围:-40-85摄氏度 良好抗震性,体积小
8
• 系统软件组成
MATLAB
SIMULINK
RTW
RTI
dSPACE 工具
• 分析,设计, 优化
• 离线的数据处理
RTW设置界面
代码编译
代码编译
周期
时间 数值计算方法
选择对应的 编译方法
ppt课件
生成*.sdf文件
Block reduction 设置为“Off”
16
• 一些注意点
• Simulink中的“Fcn”模块不能使用
• 其它工具箱中的模块多不能使用(DSP工具 箱中的“Filtering”模块可用)
• 仿真参数设置窗口中的“Block reduction”一 定设置为“Off”
• 串口
ppt课件
13
• RTI的设置(ADC模块为例)
I/O物理接口
模块功能
查手册 使用Help文档
ppt课件I/O特性 设置界面的参数描述 14
• RTI的设置(ADC模块为例)
12
6
A B
3组共6个50针接头
17
1
c
ppt课件DS1401接头
50
34
DS1103接头15
• RTW的设置及代码自动生成
ppt课件
6
• DS1103控制板
PowerPC 604e
主机接口
16M全局 SDRM
全局总线
全局总线
2M局部 2通用 RAM 定时器
自动驾驶汽车硬件在环测试技术概述

Self-driving 自动驾驶自动驾驶汽车硬件在环测试技术概述文/王敏委基于模拟仿真机制的在环测试是自动驾驶汽车研 发测试的重要过程,可以在多种虚拟场景下对车辆性 能和车辆控制算法进行低成本且高效的验证。
在车辆 研发的v形体系中,硬件在环测试是针对各个车辆电 子控制单元(ECU)进行功能、性能的测试验证。
一 般的硬件在环(HIL)测试平台可以分为四层:车辆仿 真层、传感器仿真层、场景仿真层和硬件电子控制单 元(ECU)层。
HIL测试平台可以实现多种功能的测 试验证,主要用于以下任务:构建汽车运动模型、各 种传感器模型和虚拟测试场景并开展测试;对环境感 知、路径规划、决策、车辆控制、通信与交互等算法 进行闭环评估;推动上述算法从虚拟环境到真实自动 驾驶汽车的快速移植。
1简介在环测试和实车测试是用来验证和优化自动驾驶 汽车的感知、控制等算法的主要技术。
由于自动驾驶 汽车引入了大量的新技术,有必要在技术完全成熟之 前通过在环测试对这些基于人工智能的感知和控制算 法进行预先测试评估,因此在环测试渐渐成为自动驾 驶汽车研发的强制性步骤。
传统的实车测试是一种费 时费力且成本高的测试方法,只能进行有限数量的场 景测试。
相比之下,在环测试使用了和实际车辆比较 一致的仿真传感器、车辆和交通场景,提供了一种经 济效益和测试效果比较均衡的测试环境。
通过以往的 各种自动驾驶智能算法研究和实验,验证了这种在环 测试方法在车辆功能-麵口性能分析上的高效性。
一般地,硬件在环(HIL)测试平台结构框架如图 1所示,包含多种仿真软件接口和硬件ECU接口,各 个接口组合成一个高效的封闭测试验证循环。
仿真软 件接口包含3部分:一是控制车辆运动的车辆仿真模型;二是产生车辆数据的各种传感器仿真模型;三是 模拟真实道路场景的虚丨以测试环境。
5更件ECU接口则 包含了真实的车辆ECU。
仿 口K=3H Z3■车》状志传W Im&mB f pr■孕•K&f is S t t iSB-------------------^自功《饕汽李实车平台m c m s a i M u t法V i--------**CAN!j•a a s M金■a s m____ii——1L-—-t---ts v;*畔在仿霣测试T图1自动驾驶汽车硬件在环测试平台组成仿真软件接口可以运行包括各种车辆软件,模拟 测试平台上任何所需的对象。
HIL系统在车身控制单元系统测试验证应用
HIL系统在车身控制单元系统测试验证应用HIL(Hardware-in-the-Loop)系统是在硬件环境下模拟实际环境的一种仿真测试方法。
在汽车领域中,HIL系统在车身控制单元系统的测试验证应用日益广泛。
本文将从概述HIL系统的基本原理和优势,到具体介绍HIL系统在车身控制单元系统测试验证应用方面的应用案例,全面阐述HIL系统在车身控制单元系统测试验证应用中的重要性和价值。
一、HIL系统的基本原理和优势HIL系统是一种硬件环境下的仿真测试方法,其基本原理是在测试过程中使用模拟器代替实际硬件部件,通过模拟输入信号和环境条件,使控制单元在模拟环境下进行测试验证。
HIL系统相较于实际测试具备以下优势:1、成本低廉、效率高:测试过程不需要实际硬件部件,因此可以节省成本。
同时HIL系统可以快速重复测试,提高测试效率。
2、安全稳定:测试过程不需要真实车辆,不会带来任何安全隐患。
3、高度可定制:可以根据实际测试要求进行各种测试配置和设置,提高测试结果的可靠性。
4、调试简便:可以在测试过程中实时监测测试结果,方便追溯调试问题。
二、HIL系统在车身控制单元系统测试验证应用方面的具体案例HIL系统在车身控制单元系统测试验证应用方面应用价值巨大。
以下将具体介绍几个案例:1、车身动力学仿真测试:HIL系统可以模拟不同驾驶情况下的汽车行驶状态,比如高速行驶、加速、制动、急转等。
通过改变输入参数,对车身控制单元进行测试,提高系统的稳定性和响应速度。
2、碰撞仿真测试:HIL系统可以模拟不同的碰撞情况,比如正面碰撞、侧面碰撞、倾覆等。
通过验证控制单元在不同碰撞情况下的控制策略,提高系统的安全性。
3、路面模拟测试:HIL系统可以模拟各种路面条件,比如平整路面、泥泞路面、石子路面等,通过对不同路面条件下车身控制单元的测试验证,提高系统对各种路况的适应性和稳定性。
4、电子制动系统测试:HIL系统可以模拟不同的电子制动控制策略,比如ABS、EBA、ESP等。
硬件在环解决方案_HIL_ECU测试_Labcar

PT-LABCAR
P T- L A B C A R 是 一 个 开 放 式 的 可 扩 展 硬 件 在 环 系 统 (HiL)(见图1)。它专门用于对动力总成ECU进行开 环和闭环测试。该系统可运行自动重复功能测试以 发布软件参数版本,还可在ECU开发的早期阶段验 证其控制和诊断功能。PT-LABCAR系统还可用于在 实验室中对ECU进行预标定。
一 系 列 高 性 能 技 术 特 征 确 保 了 PT-LABCAR系统功能的多样性。例如,信号生成 通道的耦隔离支持发动机爆震传感器的 精确仿真,同时还可以对ECU进行实时 访问。
PT-LABCAR先 进 的 软 件 功 能 还 可 满 足 ECU开发过程中的各种特殊要求,如可提 供有效的参数操控等。同时,该系统可与 LABCAR-AUTOMATION结合使用,进一 步简化了与复杂应用及各种工具的集成。
PT-LABCAR 动力总成应用中的硬件在环系统
功能一览
可扩展式硬件在环(HiL)系统适于开环及闭环测试 先进的线路连接结构,包括标准化的ECU连接器针 脚分配 通过测量和标定工具进行同步数据采集 带实时操作系统的标准PC 可与各种建模工具完美集成 带软件配置模板,如用于仿置
名称
LABCAR 系统基础 LABCAR系统软件包 LABCAR 系统软件包服务合同 PT-LABCAR 发动机ECU I/O模块 PT-LABCAR 变速箱ECU I/O模块 (按用户要求提供) PT-LABCAR 断接盒 LABCAR 系统测量与标定工具 LABCAR 系统故障模拟模块 LABCAR 系统升级电源 附加信号I/O模块
PT-LABCAR接线盒 PT-LABCAR发动机ECU I/O
可用户化的部件, LABCAR或第三方硬件
纯电动汽车整车控制系统设计及其硬件在环仿真
客车技术与研究第2期BUS &COACH TECHNOLOGY AND RESEARCHNo.22019作者简介:郑志敏(1990—),女,硕士;主要从事整车控制开发和软件测试工作。
纯电动汽车整车控制系统设计及其硬件在环仿真郑志敏,谢勇波,王文明,文健峰,杨杰君(湖南中车时代电动汽车股份有限公司,湖南株洲412007)摘要:采用基于模型的方法进行纯电动整车控制系统的设计,建立基于Simulink 环境的各功能模块,并进行基于dSPACE 的硬件在环(HIL )仿真测试。
关键词:纯电动汽车;控制系统;硬件在环仿真中图分类号:U469.72;U463.6文献标志码:B文章编号:1006-3331(2019)02-0012-04Design and Its Hardware -in -the -loop Simulation of Pure Electric Vehicle Control SystemZHENG Zhimin ,XIE Yongbo ,WANG Wenming ,WEN Jianfeng ,YANG Jiejun (Hunan CRRC Times Electric Vehicle Co.,Ltd.,Zhuzhou 412007,China )Abstract :The model -based method is used to design the control system for pure electric vehicles ,the func-tion modules based on Simulink environment is established ,and the hardware -in -the -loop (HIL )simula-tion test based on dSPACE is carried out.Key words :pure electrical vehicle ;control system ;hardware -in -the -loop simulation 纯电动整车控制技术直接决定着车辆运行的稳定和安全[1-2]。
Hil在汽车整车测试及开发系统中的应用
Hil在汽车整车测试及开发系统中的应用打开文本图片集摘要:目前中国的汽车市场竞争愈演愈烈,人们在追求汽车高性能的同时对于汽车的测试要求也在不断的提高,因此不论对于汽车的生产厂商还是汽车维修行业,都需要一种更加方面快速的仿真测试方法,那就是硬件在环技术。
硬件在环仿真测试系统可以实时的模拟出驾驶员以及车辆的具体工作环境,大大降低了车辆测试的风险,缩短了开发的周期,有效的降低开发成本。
【关键词】:^p :Hil(硬件在环);汽车技术;ECU;仿真模型1 认识HILHiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器(真实的控制器)运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,通过I/O接口与被测的ECU连接,对被测系统进行全方面的、系统的测试[1]。
这种仿真是出于计算机离线仿真和实物台架测试之间的一种测试类型,它将实物硬件嵌入到仿真系统中的实时动态仿真技术。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,这种技术无需真实车辆即可达到测试的目的,减少了实车路试的次数,大大降低了车辆测试的风险,缩短开发时间,有效降低成本,同时提高ECU的软件质量,降低汽车厂的风险。
目前,硬件在环测试系统以其专业性、实用性以及高效性被广泛适用于各项应用中。
2 Hil测试系统的基本架构2.1 HIL测试系统的基本结构HIL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HIL测试系统的核心部分。
它的主要是精确地仿真测试系统中物理上并不存在的部分,即仿真出实际汽车驾驶及行驶过程中的可能出现的任何异常情况,同时对这些情况进行数据记录、硬件I/O通信并生成仿真模型并执行整个测试系统;I/O接口用于控制器与被测ECU之间的信息交互,它也可是用来产生某些产生激励信号,进行各种模拟信号、数字信号和总线信号的通信及数据传输。
智能车硬件在环仿真系统的设计与实现

3、故障诊断与恢复
HiL系统在运行过程中可能会遇到各种故障和异常情况,为了保证系统的稳定 性和可靠性,需要实现故障诊断和恢复机制。在实际应用中,可以使用故障诊 断专家系统、自适应滤波等方法进行故障诊断和恢复。
结论:
智能车硬件在环仿真系统是一种有效的智能汽车研发测试方法,它可以提高车 辆的安全性、舒适性和环保性能。通过HiL系统的设计和实现,可以在车辆实 际制造之前对控制算法、决策策略、系统性能等进行全面评估和优化,降低车 辆研发和测试成本,缩短车辆研发周期。
谢谢观看
2、仿真环境设计
仿真环境是HiL系统的核心部分,其精度和真实性直接影响到测试结果的可信 度。因此,需要建立高精度的车辆模型、传感器模型和道路环境模型。在实际 应用中,可以使用现有的仿真软件平台进行二次开发,如MATLAB/Simulink、 Prescan等,以满足特定需求。
3、实时操作系统设计
未来随着智能汽车技术的不断发展,HiL系统也将不断改进和完善,为智能汽 车的研发和应用提供更强大的支持。
参考内容
随着可再生能源在全球能源结构中的地位日益提升,风能作为一种重要的可再 生能源,得到了广泛的应用和发展。风电变流器作为风力发电系统中不可或缺 的部分,其性能和稳定性对整个风电系统的运行有着重要影响。本次演示主要 探讨了风电变流器的RTLAB硬件在环仿真系统设计与实现方法。
智能车硬件在环仿真系统的设 计与实现
目录
01 一、智能车硬件在环 仿真的概念
03
三、智能车硬件在环 仿真系统的实现
02
二、智能车硬件在环 仿真系统的设计
04 参考内容
随着科技的快速发展,智能汽车已经成为现代交通领域的重要组成部分。为了 在激烈的市场竞争中保持领先地位,许多汽车制造商和研发机构都在积极探索 和研究新的技术,以提高汽车的安全性、舒适性和环保性能。其中,智能车硬 件在环仿真系统(Hardware-in-the-Loop Simulation,简称HiL)作为一种 有效的仿真测试方法,被广泛应用于智能汽车的研发过程中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 如何打开RTI库及实现库之间的切换?
• 如何打开RTI库
– Matlab工作空间输入“rti” – Simulink浏览器
• 如何在库之间切换
– Matlab工作空间输入“rti+控制板型号”, 如“rti1103”
• RTI模块(DS1401为例) • ADC/DAC • DIO(PWM,频率捕捉,数字量输入输出) • CAN • 串口
浏览器
工具栏
菜单栏
• 常用工具
• 文件选择器(File selector)
– 浏览硬盘文件 – 拖放文件
工具窗口
• 常用工具
• 变量浏览器
– 浏览硬件中算法内部的所有状态变量及相关输入 输出
– 拖放变量
工具窗口
• 常用工具 • ControlDesk文件管理器(ControlDesk)
– 打开,新建,保存Layout等文件
代码;否则仅生成*.sdf文件
• RTI的高级应用 • 中断处理(软件和硬件中断) • 定时器的调用 • 多任务的处理 • 非周期系统的处理(触发和使能系统)
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
• ControlDesk界面
代码自动生成,与Matlab的无缝连接 直接访问实时系统 图形化显示,实时在线设计和调整
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
• RTI/RTW的使用
Simulink框图
RTI: 硬件接口程序
RTW: 代码自动生成
dSPACE控制板
DS1103 PPC Board DS1401 PPC Board
被控对象
单处理器系统和多处理器系统 硬件在回路(HIL) 快速控制原型(RCP) 利用MotionDesk在线三维显示
• DS1103控制板
PowerPC 604e
主机接口
16M全局 SDRM
全局总线
全局总线
2M局部 2通用 RAM 定时器
• dSPACE的“V”型开发模式
功能设计
标定
快速控制原型
硬件在回路仿真
目标代码生成
• 典型开发流程
开发被控对象的 理论模型
开发初步的控制算法
离线仿真测试 控制算法
I/O设置
建立ControlDesk 获得数据,观察及调节
变量
产生模型的 实时代码
• 系统硬件组成
主机
ControlDesk MotionDesk MLIB / MTRACE CLIB
选择对应的 编译方法
生成*.sdf文件
Block reduction 设置为“Off”
• 一些注意点
• Simulink中的“Fcn”模块不能使用 • 其它工具箱中的模块多不能使用(DSP工具
箱中的“Filtering”模块可用) • 仿真参数设置窗口中的“Block reduction”一
定设置为“Off” • 编译出现RTI错误,可尝试新建*.mdl文件 • AutoBox开启状态下,编译完成后会自动下载
菜单栏
AutoBox为”Network connection”,IP地址为192.168.77.85,主机的IP必须要 在同一个段内
MicroAutoBox为”Bus connection” 若出错,注意检查日志管理器的错误提示
• 准备工作
• 平台初始化
1. 菜单栏
2. 右键点击平台浏览器
3.工具栏
若出错,注意检查日志管理器 的错误提示
平台浏览器会出现注册平台
• 算法文件(*.sdf)的下载 • 自动下载
完成上述准备 工作
编译*.mdl 文件
首次下载算法 对算法模型结构进行了调整
• 算法文件(*.sdf)的下载
• 手动下载
拖放
2. 工具栏
Pidrtdu.sdf
3. 菜单栏
• 虚拟仪器的使用 • 创建仪表板
工具栏
菜单栏
• 常用工具
• 虚拟仪器管理器(Instrumentation)
– 设置建立的虚拟仪器的工作状态(Animation, Edit,Test)
工具栏
菜单栏
• 常用工具
• 虚拟仪器(Instrument Selector)
– 浏览虚拟仪器 – 在Layout中创建虚拟仪器
• 准备工作 • 设置ControlDesk与硬件的连接方式
• RTI的设置(ADC模块为例)
I/O物理接口
模块功能
查手册 使用Help文档
I/O特性 设置界面的参数描述
• RTI的设置(ADC模块为例)
12
6
A B
3组共6个50针接头
17
1
c
DS1401接头
50
34
DS1103接头
• RTW的设置及代码自动生成
RTW设置界面
代码编译
代码编译
时间
周期
数值计算方法
菜单栏
工具栏设置菜单 (右键点击工具栏)
工具栏
浏览器
视窗
虚拟仪器
工具窗口 状态栏
• 常用工具
• 日志观察器(Log viewer)
– 观察ControlDesk的行为 – 错误信息
工具窗口
• 常用工具
• 平台浏览器(Platform manager)
– 设置与硬件的连接,创建/清除平台注册文件 – 浏览平台,控制实验过程 – 下载*.sdf文件
1. 菜单栏: File 2.工具栏: ControlDesk
直接创建对象
• 虚拟仪器的使用
• 设计仪表板
仪表板(Layout)
虚拟仪器 选择仪表
属性对话框
• 虚拟仪器的使用 • 实例
• 虚拟仪器的使用 • 变量与仪器的关联
仪表板
拖放指令 变量浏览器
只有参量可以在线修改 其它变量只能观测和记录
RTI 变量 参量 输出
• 虚拟仪器的使用 • 曲线的显示和数据保存 曲线显示的起停
曲线是否 自动刷新
是否启用触 发信号及触
发形式
设置触发 信号启动 曲线显示
保存曲 线数据
曲线时 间长度
整车硬件在环测试系统软硬件介绍
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
• 并行工程问题
• RCP:将设计软件开发的算法方便快捷地在 实时硬件平台上实现,观察其与硬件相连后 的性能,且能进行反复实验和设计。
• HILS:在对象还处于研制阶段或对象硬件很 难得到时,能够在早期完成对控制算法的测 试。
DS1103 PPC 板
AutoBox
MicroAutoBox(DS1401)
AD/DA、数字I/O口多,CAN接口少,具有其它 的标准接口(如陀螺、机器人控制)
电源:135W,8-100V 温度范围:-10-55摄氏度 良好的抗震性,体积大
CAN接口多,其它接口较少 电源:20W,6-40V 温度范围:-40-85摄氏度 良好抗震性,体积小
• 系统软件组成
MATLAB
SIMULINK
RTW
RTI
dSPACE 工具
• 分析,设计, 优化
• 离线的数据处理
• 基于方块图的建模 • 离线仿真
• 从模块生成C代码
• 实时接口模块库 • 自动代码实现
• ControlDesk/Motion Desk:实验的自动控 制和测试
• 与MATLAB接口的 MLIB/MTRACE
中断 控制器
16/32位 I/O总线
TMS320F240 DSP
双端口 RAM
PWM
4路记 录输入
ADC 16路10位
串行接口
18位数字I/O
双端口 RAM
CAN接口 80C164
串行接口
32通道 数字I/O
6通道增 量编码器
ADC 16路16位 4路12位
DAC 8路14位
• AutoBox和MicroAutoBox