数字图像处理大作业
数字图像处理大作业
1、下图是一用于干涉原理进行测试的干涉场图像,要求判读条纹的间距,请给出图像处理的方案并说明每一步的作用及其对其它处理步骤可能产生的影响。
解:步骤与思路:○1.进行模糊处理,消除噪声○2.边缘检测,进行图像增强处理○3.二值化图像,再进行边缘检测,能够得到很清晰的边界。
○4.采用横向标号法,根据值为1像素在标号中的相邻位置可以确定间距I=imread('xz mjt.bmp');I1=medfilt2(I); %对图像中值滤波imshow(I1);[m,n]=size(I1);for i=1:mfor j=1:nif(I1(i,j)<100) %阈值为100I1(i,j)=255;elseI1(i,j)=0; %进行二值化endendendfigure;imshow(I1);Y1=zeros(1,25);y2=y1;c=y2;i=100;for j=1:1200if (I1(i,j)==255&&I1(i,j+1)==0)Y1=j+1;endif (I1(i,j)==0&&I1(i,j+1)==255)Y2=j;endendfor i=1:25c=Y2(i)-Y1(i)endc %找出每两个条纹之间的距离2. 现有8个待编码的符号m0,……,m7,它们的概率分别为0.11,0.02,0.08,0.04,0.39,0.05,0.06,0.25,利用哈夫曼编码求出这一组符号的编码并画出哈夫曼树。
3. 请以图像分割方法为主题,结合具体处理实例,采用期刊论文格式,撰写一篇小论文。
各种算子对图像进行边缘检测效果的研究图像分割是根据需要将图像划分为有意义的若干区域或部分的图像处理技术。
通过边缘检测在Matlab中实现方法,及用四叉数分解函数进行区域分割的方法,掌握了Matlab区域操作函数的使用和图像分析和理解的基本方法,并学到了'roberts','sobel','prewitt','canny','log'算子对图像进行边缘检测的不同效果。
《数字图像处理》期末大作业(1)
《数字图像处理》期末大作业大作业题目及要求:一、题目:本门课程的考核以作品形式进行。
作品必须用Matlab完成。
并提交相关文档。
二、作品要求:1、用Matlab设计实现图形化界面,调用后台函数完成设计,函数可以调用Matlab工具箱中的函数,也可以自己编写函数。
设计完成后,点击GUI图形界面上的菜单或者按钮,进行必要的交互式操作后,最终能显示运行结果。
2、要求实现以下功能:每个功能的演示窗口标题必须体现完成该功能的小组成员的学号和姓名。
1)对于打开的图像可以显示其灰度直方图,实现直方图均衡化。
2)实现灰度图像的对比度增强,要求实现线性变换和非线性变换(包括对数变换和指数变换)。
3)实现图像的缩放变换、旋转变换等。
4)图像加噪(用输入参数控制不同噪声),然后使用空域和频域进行滤波处理。
5)采用robert算子,prewitt算子,sobel算子,拉普拉斯算子对图像进行边缘提取。
6)读入两幅图像,一幅为背景图像,一幅为含有目标的图像,应用所学的知识提取出目标。
3、认真完成期末大作业报告的撰写,对各个算法的原理和实验结果务必进行仔细分析讨论。
报告采用A4纸打印并装订成册。
附录:报告模板《数字图像处理》期末大作业班级:计算机小组编号:第9组组长:王迪小组成员:吴佳达浙江万里学院计算机与信息学院2014年12月目录(自动生成)1 绘制灰度直方图,实现直方图均衡化 (5)1.1 算法原理 (5)1.2 算法设计 (5)1.3 实验结果及对比分析 (5)2 灰度图像的对比度增强 (5)2.1 算法原理 (5)2.2 算法设计 (5)2.3 实验结果及分析 (5)3 图像的几何变换 (5)3.1 算法原理 (5)3.2 算法设计 (5)3.3 实验结果及分析 (5)4 图像加噪(用输入参数控制不同噪声),然后使用空域和频域进行滤波处理 (5)4.1 算法原理 (5)4.2 算法设计 (6)4.3 实验结果及分析 (6)5 采用robert,prewitt,sobel,拉普拉斯算子对图像进行边缘提取 (6)5.1 算法原理 (6)5.2 算法设计 (6)5.3 实验结果及分析 (6)6 读入两幅图像,一幅为背景图像,一幅为含有目标的图像,应用所学的知识提取出目标 (6)6.1 算法原理 (6)6.2 算法设计 (6)6.3 实验结果及分析 (6)7 小结(感受和体会) (6)1 绘制灰度直方图,实现直方图均衡化1.1 算法原理图像增强是指按特定的需要突出一幅图像中的某些信息,同时,消弱或去除某些不需要的信息的处理方法。
《数字图像处理》期末大作业

《数字图像处理》期末大作业大作业题目及要求:一、题目:本门课程的考核以作品形式进行。
作品必须用Matlab完成。
并提交相关文档。
二、作品要求:1、用Matlab设计实现图形化界面,调用后台函数完成设计,函数可以调用Matlab工具箱中的函数,也可以自己编写函数。
设计完成后,点击GUI 图形界面上的菜单或者按钮,进行必要的交互式操作后,最终能显示运行结果。
2、要求实现以下功能:每个功能的演示窗口标题必须体现完成该功能的小组成员的学号(后三位)。
1)对于打开的图像可以显示其灰度直方图,实现直方图均衡化和直方图匹配(规定化)。
2)实现灰度图像的对比度增强,要求实现线性变换和非线性变换(包括对数变换和指数变换)。
3)实现图像的缩放变换、旋转变换等。
4)图像加噪(用输入参数控制不同噪声),然后使用空域和频域进行滤波处理。
5)采用robert算子,prewitt算子,sobel算子,拉普拉斯算子对图像进行边缘提取。
6)读入两幅图像,一幅为背景图像,一幅为含有目标的图像,应用所学的知识提取出目标。
3、认真完成期末大作业报告的撰写,对各个算法的原理和实验结果务必进行仔细分析讨论。
报告采用A4纸打印并装订成册。
附录:报告模板《数字图像处理》期末大作业班级:小组编号:组长:小组成员:浙江万里学院计算机与信息学院2013年12月目录(自动生成)1 绘制灰度直方图,实现直方图均衡化和直方图匹配(规定化)1.1 算法原理1.2 算法设计1.3 实验结果及对比分析图1 ××××××图2 ××××××分析***********************************************2 灰度图像的对比度增强2.1 算法原理2.2 算法设计2.3 实验结果及分析3 图形的几何变换3.1 算法原理3.2 算法设计3.3 实验结果及分析4 图像加噪(用输入参数控制不同噪声),然后使用空域和频域进行滤波处理4.1 算法原理4.2 算法设计4.3 实验结果及分析5 采用robert,prewitt,sobel,拉普拉斯算子对图像进行边缘提取5.1 算法原理5.2 算法设计5.3 实验结果及分析6 读入两幅图像,一幅为背景图像,一幅为含有目标的图像,应用所学的知识提取出目标6.1 算法原理6.2 算法设计6.3 实验结果及分析7 小结(感受和体会)(英文版)Two regulations promulgated for implementation is in the party in power for a long time and the rule of law conditions, the implementation of comprehensive strictly strategic plan, implementation in accordance with the rules and discipline to manage the party, strengthen inner-party supervision of major initiatives. The two regulations supporting each other, the < code > adhere to a positive advocate, focusing on morality is of Party members and Party leading cadres can see, enough to get a high standard; < rule > around the party discipline, disciplinary ruler requirements, listed as "negative list, focusing on vertical gauge, draw the party organizations and Party members do not touch the" bottom line ". Here, the main from four square face two party rules of interpretation: the first part introduces two party Revised regulations the necessity and the revision process; the second part is the interpretation of the two fundamental principles of the revision of laws and regulations in the party; the third part introduces two party regulations modified the main changes and needs to grasp several key problems; the fourth part on how to grasp the implementation of the two regulations of the party. < code > and < Regulations > revised the necessity and revised history of the CPC Central Committee the amendment to the Chinese Communist Party members and leading cadres honest politics several guidelines > and < Chinese Communist Party discipline and Punishment Regulations > column 1 by 2015 to strengthenparty laws and regulations focus. Two party regulations revision work lasted a Y ears, pooling the wisdom of the whole party, ideological consensus, draw historical experience, respect for the wisdom of our predecessors, which reflects the unity of inheritance and innovation; follow the correct direction, grasp the limited goals, adhere to the party's leadership, to solve the masses of the people reflect a focus on the problem. The new revision of the < code > and < rule >, reflects the party's 18 and the eighth session of the third, the spirit of the fourth plenary session, reflecting the experience of studying and implementing the General Secretary Xi Jinping series of important speech, reflects the party's eighteen years comprehensive strictly practice. (a) revised two regulations of the party need of < the ICAC guidelines > in < in 1997 Leaders as members of the Communist Party of China clean politics certain criteria (Trial) > based on revised, the promulgation and implementation of January 2010, to strengthen the construction of the contingent of leading cadres play an important role. But with the party to manage the party strictly administering the deepening, has not been able to fully meet the actual needs. Content is too complicated, "eight prohibition, 52 are not allowed to" hard to remember, and also difficult to put into practice; the second is concisely positive advocated by the lack of prohibited provisions excessive, no autonomy requirements; the third is banned terms and discipline law, both with the party discipline, disciplinary regulationsrepeat and Criminal law and other laws and regulations repeat; the fourth is to "clean" the theme is not prominent, not for the existing problems, and is narrow, only needle of county-level leading cadres above. < rule > is in 1997 < Chinese Communist Party disciplinary cases (Trial) > based on revision, in December 2003 the promulgation and implementation, to strengthen the construction of the party play very important role. Along with the development of the situation, which many provisions have been unable to fully meet the comprehensive strictly administering the practice needs. One is Ji law, more than half of the provisions and criminal law and other countries laws and regulations Repetition; two is the political discipline regulations is not prominent, not specific, for violation of the party constitution, damage the authority of Party Constitution of misconduct lack necessary and serious responsibility to pursue; third is the main discipline for the leading cadres, does not cover all Party members. Based on the above situation, need to < the criterion of a clean and honest administration > and < rule > the two is likely to be more relevant regulations first amendment. By revising, really put the authority of Party discipline, the seriousness in the party tree and call up the majority of Party members and cadres of the party constitution of party compasses party consciousness. (II) two party regulations revision process the Central Committee of the Communist Party of China attaches great importance to two regulations revision . Xi Jinping, general books recorded in the FifthPlenary Session of the eighth session of the Central Commission for Discipline Inspection, on the revised regulations < > made clear instructions. According to the central deployment, the Central Commission for Discipline Inspection from 2014 under six months begin study two regulations revision. The Standing Committee of the Central Commission for Discipline Inspection 4 review revised. Comrade Wang Qishan 14 times held a special meeting to study two regulations revision, amendment clarifies the direction, major issues of principle, path and target, respectively held a forum will listen to part of the province (area) secretary of the Party committee, Secretary of the Discipline Inspection Commission, part of the central ministries and state organs DepartmentThe first party committee is mainly responsible for people, views of experts and scholars and grassroots party organizations and Party members. Approved by the Central Committee of the Communist Party of China, on 7 September 2015, the general office of the Central Committee of the Party issued a notice to solicit the provinces (autonomous regions, municipalities) Party, the central ministries and commissions, state ministries and commissions of the Party (party), the General Political Department of the military, every 3 people organization of Party of two regulations revision opinion. Central Commission for Discipline Inspection of extensive solicitation of opinions, careful study, attracting, formed a revised sent reviewers. In October 8 and October 12, Central Committee PoliticalBureau Standing Committee and the Political Bureau of the Central Committee After consideration of the two regulations revised draft. On October 18, the Central Committee of the Communist Party of China formally issued two regulations. Can say, two laws amendment concentrated the wisdom of the whole party, embodies the party. Second, < code > and < Regulations > revision of the basic principles of two party regulations revision work and implement the party's eighteen, ten eight plenary, the spirit of the Fourth Plenary Session of the Eleventh Central Committee and General Secretary Xi Jinping important instructions on the revised < low political criterion > and < Regulations >, highlighting the ruling party characteristics, serious discipline, the discipline quite in front of the law, based on the current, a long-term, advance as a whole, with Bu Xiuding independent < rule > and < rule >. Main principle is: first, adhere to the party constitution to follow. The constitution about discipline and self-discipline required specific, awaken the party constitution of party compasses party consciousness, maintaining the authority of the constitution. General Secretary Xi Jinping pointed out that "no rules, no side round. Party constitution is the fundamental law, the party must follow the general rules. In early 2015 held the eighth session of the Central Commission for Discipline Inspection Fifth Plenary Session of the 16th Central Committee, Xi Jinping again pointed out that constitution is the party must follow the general rules, but also the general rules." the revisionof the < code > and < rule > is Method in adhere to the regulations established for the purpose of combining rule of virtue is to adhere to the party constitution as a fundamental to follow, the constitution authority set up, wake up the party constitution and party rules the sense of discipline, the party constitution about discipline and self-discipline specific requirements. 4 second is to adhere to in accordance with the regulations governing the party and the party. The Party of rule of virtue "de", mainly refers to the party's ideals and beliefs, excellent traditional style. The revised the < code > closely linked to the "self-discipline", insisting on the positive initiative, for all members, highlight the "vital few", emphasized self-discipline, focusing on the morality, and the majority of Party members and the ideological and moral standards. The revised < > Ji method separately, Ji, Ji Y an to Method, as a "negative list", emphasizing the heteronomy, focusing on vertical gauge. Is this one high and one low, a positive reaction, the strict party discipline and practice results transformation for the integration of the whole party to observe moral and discipline requirements, for the majority of Party members and cadres provides benchmarking and ruler. Third, insist on to. In view of the problems existing in the party at the present stage, the main problems of Party members and cadres in the aspect of self-discipline and abide by the discipline to make clearly defined, especially the party's eighteen years strict political discipline and political rules, organization and discipline andto implement the central eight provisions of the spirit against the four winds and other requirements into Disciplinary provisions. Not one pace reachs the designated position, focusing on in line with reality, pragmatic and effective. After the revision of major changes, major changes in the < code > and < rule > modified and needs to grasp several key problems (a) < code > < code > adhere to according to regulations governing the party and party with morals in combination, for at the present stage, the leadership of the party members and cadres and Party members in existing main problems of self-discipline, put forward principles, requirements and specifications, showing Communists noble moral pursuit, reflected at all times and in all over the world ethics from high from low 5 common requirements. One is closely linked to the "self-discipline", removal and no direct relation to the provisions of . the second is adhere to a positive advocate, "eight prohibition" 52 are not allowed to "about the content of the" negative list moved into synchronization amendment < cases >. Three is for all the party members, will apply object from the leadership of the party members and cadres to expand to all Party members, fully embodies the comprehensive strictly required. The fourth is prominent key minority, seize the leadership of the party members and cadres is the key, and put forward higher requirements than the ordinary Party members. Five is to simplify, and strive to achieve concise, easy to understand, easy to remember. The revised < code > is the ruling Party since the first insists ona positive advocate forAll Party members and the self-discipline norms, moral declaration issued to all members of the party and the National People's solemn commitment. > < criterion of a clean and honest administration consists of 4 parts, 18, more than 3600 words. After the revision of the < code >, a total of eight, 281 words, including lead, specification and Party member cadre clean fingered self-discipline norms, etc. Part 3 members low-cost clean and self-discipline, the main contents can be summarized as "four must" "eight code". Lead part, reiterated on ideal and faith, fundamental purpose, the fine traditions and work style, noble sentiments, such as "four must" the principle of requirements, strong tone of self-discipline, The higher request for 6 and supervised tenet, the foothold in permanent Bao the party's advanced nature and purity, to reflect the revised standards requirements. Members of self-discipline norms around the party members how to correctly treat and deal with the "public and private", "cheap and rot" thrifty and extravagance "bitter music", put forward the "four norms". Party leader cadre clean fingered self-discipline norms for the leadership of the party members and cadres of the "vital few", around the "clean politics", from civil servant of the color, the exercise of power, moral integrity, a good family tradition and other aspects of the leadership of the party members and cadres of the "four norms" < > < norm norm. "The Party member's self-discipline norms" and "party members and leading cadre clean fingered self-discipline norms," atotal of eight, collectively referred to as the "eight". "Four must" and "eight" of the content from the party constitution and Party's several generation of leaders, especially Xi Jinping, general secretary of the important discussion, refer to the "three discipline and eight points for attention" statements, and reference some embody the Chinese nation excellent traditional culture essence of epigrams. (2) the revised regulations, the main changes in the revised Regulations > to fully adapt to the strictly requirements, reflects the according to the regulations governing the law of recognition of deepening, the realization of the discipline construction and Jin Ju. < rule > is party a ruler, members of the basic line and follow. And the majority of Party members and cadres of Party organizations at all levels should adhere to the bottom line of thinking, fear discipline, hold the bottom line, as a preventive measure, to keep the party's advanced nature and purity. 1, respect for the constitution, refinement and discipline. Revised < rule > from comprehensive comb physical constitution began, the party constitution and other regulations of the Party of Party organizations and Party discipline requirements refinement, clearly defined in violation of the party constitution will be in accordance with regulations to give the corresponding disciplinary action. The original 10 categories of misconduct, integration specification for political discipline, discipline, honesty and discipline masses Ji Law and discipline and discipline and other six categories, the content of < rule >real return to Party discipline, for the majority of Party members and listed a "negative list. 7 2, highlighting the political discipline and political rules. > < Regulations according to the stage of the discipline of outstanding performance, emphasizing political discipline and political rules, organization and discipline, in opposition to the party's leadership and the party's basic theory, basic line, basic program and basic experience, the basic requirement of behavior made prescribed punishment, increase the cliques, against the organization such as violation of the provisions, to ensure that the central government decrees and the Party of centralized and unified. 3, adhere to strict discipline in the law and discipline In front, Ji separated. Revised < Regulations > adhere to the problem oriented, do Ji separated. Any national law existing content, will not repeat the provisions, the total removal of 79 and criminal law, repeat the content of the public security management punishment law, and other laws and regulations. In the general reiterated that party organizations and Party members must conscientiously accept the party's discipline, die van comply with national laws and regulations; at the same time, to investigate violations of Party members and even criminal behavior of Party discipline and responsibility, > < Regulations distinguish five different conditions, with special provisions were made provisions, so as to realize the connection of Party discipline and state law. 4, reflect Wind building and anti-corruption struggle of the latest achievements. < rule > the party's eighteen yearsimplement the spirit of the central provisions of the eight, against the requirements of the "four winds" and transformation for disciplinary provisions, reflecting the style construction is always on the road, not a gust of wind. In the fight against corruption out of new problems, increase the trading rights, the use of authority relatives profit and other disciplinary terms. Prominent discipline of the masses, the new against the interests of the masses and ignore the demands of the masses and other disciplinary terms and make provisions of the disposition and the destruction of the party's close ties with the masses.Discipline to protect the party's purpose. 8 of these regulations, a total of three series, Chapter 15, 178, more than 24000 words, after the revision of the regulations a total of 3 series, Chapter 11, 133, 17000 words, divided into "general" and "special provisions" and "Supplementary Provisions" Part 3. Among them, add, delete, modify the provisions of the proportion of up to nearly 90%. 1, the general general is divided into five chapters. The first chapter to the regulations of the guiding ideology, principles and scope of application of the provisions, highlight the strengthening of the party constitution consciousness, maintenance the authority of Party Constitution, increase the party organizations and Party members must abide by the party constitution, Y an Centralized centralized, would examine at all levels of the amended provisions implementing and maintaining Party discipline, and consciously accept the party discipline,exemplary compliance with national laws and regulations. The second chapter of discipline concept, disciplinary action types and effects of the regulations, will be a serious warning from the original a year for a year and a half; increase the Party Congress representative, by leaving the party above (including leave probation) punishment, the party organization should be terminated its representative qualification provisions. The third chapter of the disciplinary rules of use prescribed in the discipline rectifying process, non convergence, not close hand classified as severely or heavier punishment. "Discipline straighten "At least eighteen years of five years, these five years is to pay close attention to the provisions of the central eight implementation and anti -" four winds ". The fourth chapter on suspicion of illegal party disciplinary distinguish five different conditions, with special provisions were made provisions, to achieve effective convergence of Party and country 9 method. < rule > the provisions of Article 27, Party organizations in the disciplinary review found that party members have committed embezzlement, bribery, dereliction of duty dereliction of duty and other criminal law act is suspected of committing a crime shall give cancel party posts, probation or expelled from the party. The second is < Regulations > Article 28 the provisions of Party organizations in the disciplinary review But found that party members are stipulated in the criminal law, although not involved in a crime shall be investigated for Party discipline and responsibility shouldbe depending on the specific circumstances shall be given a warning until expelled punishment. This situation and a difference is that the former regulation behavior has been suspected of a crime, the feeling is quite strict, and the latter for the behavior not involving crime, only the objective performance of the provisions of the criminal code of behavior, but the plot is a crime to slightly. < Regulations > the 29 provisions, Party organizations in the discipline review found that party members and other illegal behavior, affect the party's image, the damage to the party, the state and the people's interests, we should depend on the situation Seriousness given disciplinary action. The loss of Party members, seriously damaging the party's image of behavior, should be given expelled from the party. At this article is party member is in violation of the criminal law outside the other illegal acts, such as violates the public security administration punishment law, customs law, financial laws and regulations behavior. The fourth is < cases > Article 32 stipulates, minor party members and the circumstances of the crime, the people's Procuratorate shall make a decision not to initiate a prosecution, or the people's court shall make a conviction and exempted from criminal punishment shall be given within the party is removed from his post, probation or expelled from the party. Party members and crime, sheets were fined in accordance with For acts; the principal Ordinance amended the provisions of the preceding paragraph. This is the new content, in order to achieve Ji method effectiveconvergence. Five is < > the thirty third article 10 of the provisions, the Party member due to an intentional crime is sentenced to criminal law (including probation) sheets or additional deprivation of political rights; due to negligence crime and was sentenced to three years or more (excluding three years) a penalty, shall give expelled punishment. Due to negligence crime is convicted and sentenced to three years (including three years) in prison or be sentenced to public surveillance, detention, shall in general be expelled from the party. For the individual may not be expelled from the party, should control Approval. This is followed and retained the original > < Regulations the provisions of punishment party authorization rules and report to a level party organizations. For is "party members with criminal acts, and by the criminal punishment, generally should be expelled from the party". The fifth chapter of probationary Party member of the discipline and discipline after missing members of the treatment and punishment decisions, such as the implementation of the provisions, clear the related party discipline and punishment decision made after, for duties, wages and other relevant alteration formalities for the longest time. 2, sub sub section will the original regulations of10 categories of acts of violation of discipline integration revised into 6 categories, respectively, in violation of the punishments for acts of political discipline "in violation of discipline behavior of punishment" in violation of integrity of disciplinary action points "of violation punishments for actsof mass discipline" "the violation of work discipline, punishment" in violation of discipline of life behavior punishment "6 chapters. 3, annex" Supplementary Provisions "clear authority making supplementary provisions of, cases of interpretative organ, as well as regulations implementation time and retroactivity etc.. 11 (3) learning understanding > < regulations needs to grasp several key problems The first problem -- about the violation of political discipline behavior > < new ordinance chapter 6 the political discipline column for the six disciplines, that is the main opposition to Party leadership and the opposition of the basic theory, basic line, basic program and basic experience, basic requirements of misconduct made provisions of the disposition, especially the eighteen since the CPC Central Committee put forward the Yan Mingzheng treatment of discipline and political rules requirements and practical achievements transformation for Discipline article, increase the false debate central policies, cliques, against the organization review, make no discipline of the principle of harmony terms. These are the party's eighteen years in comprehensive strictly Process combined with the practice of rich content. (1) false debate the central policies and undermine the Party of centralized and unified the problem is made in accordance with the provisions of the party constitution. Constitution in general programme requirements adhere to democratic centralism is one of the requirements of the construction of the party must adhere to the four cardinal. Applicationof this principle is not only the party the basic organization principle and is also the mass line in party life, it requires that we must fully develop inner-party democracy, respect for the dominant position of Party members, safeguarding the Party member democratic rights, give full play to the enthusiasm and creativity of the party organizations at all levels and Party members, at the same time, also must implement the right concentration, ensure the party's mission < the chaos in unity and concerted action to ensure that the party's decision to get quickly and effectively implementing. The Party Central Committee formulated the major principles and policies, through different channels and ways, fully listen to the party organizations and Party members of the opinions and suggestions, but 12 is some people face to face not to say back blather "" will not say, after the meeting said, "" Taiwan does not say, and nonsense ", in fact, not only disrupt the people thought, some causing serious consequences, the damage to the Party of the centralized and unified, hinder the central policy implementation, but also a serious violation of the democratic system of principles. There is no doubt that shall, in accordance with the Regulations > 4 Specified in Article 6 to give the appropriate punishment. For did not cause serious consequences, to give criticism and education or the corresponding tissue processing. (2) about the destruction of the party's unity < New Regulations > the forty eighth to fifty second article, to damage Party's unity unified and violation of political discipline, punishment situationmade explicit provisions. Article 52 of the new "in the party get round group, gangs seek private gain, cliques, cultivate private forces or through the exchange of interests, for their own to create momentum and other activities to gain political capital, given a serious warning or withdraw from their party posts disposition; if the circumstances are serious, to give Leave a party to observation or expelled from the party. (3) on against the organization review of the provisions of the constitution, party loyalty honesty is party members must comply with the obligations. Members must obey the organization decision, shall not violate the organization decided encounters by asking questions to find organization, rely on the organization, shall not deceive the organization, against the organization. For example, after the investigation does not take the initiative to explain the situation, but to engage in offensive and defensive alliance, hiding the stolen money is against survey organization, is a violation of the behavior of political discipline. Article 24 of the original > < Regulations, although the provisions of the interference, hinder group review the behavior of the fabric can be severely or 13 Aggravated punishment, but did not put this kind of behavior alone as a discipline for qualitative amount of discipline. > < new regulations increase the Article 57, "anti organization review, one of the following acts, given a warning or serious warning; if the circumstances are relatively serious, giving removed from or placed on probation within the party post; if the circumstances are serious, give。
数字图像处理大作业
1、下图是一用于干涉原理进行测试的干涉场图像,要求判读条纹的间距,请给出图像处理的方案并说明每一步的作用及其对其它处理步骤可能产生的影响。
解:步骤与思路:○1.进行模糊处理,消除噪声○2.边缘检测,进行图像增强处理○3.二值化图像,再进行边缘检测,能够得到很清晰的边界。
○4.采用横向标号法,根据值为1像素在标号中的相邻位置可以确定间距I=imread('xz mjt.bmp');I1=medfilt2(I); %对图像中值滤波imshow(I1);[m,n]=size(I1);for i=1:mfor j=1:nif(I1(i,j)<100) %阈值为100I1(i,j)=255;elseI1(i,j)=0; %进行二值化endendendfigure;imshow(I1);Y1=zeros(1,25);y2=y1;c=y2;i=100;for j=1:1200if (I1(i,j)==255&&I1(i,j+1)==0)Y1=j+1;endif (I1(i,j)==0&&I1(i,j+1)==255)Y2=j;endendfor i=1:25c=Y2(i)-Y1(i)endc %找出每两个条纹之间的距离2. 现有8个待编码的符号m0,……,m7,它们的概率分别为0.11,0.02,0.08,0.04,0.39,0.05,0.06,0.25,利用哈夫曼编码求出这一组符号的编码并画出哈夫曼树。
3. 请以图像分割方法为主题,结合具体处理实例,采用期刊论文格式,撰写一篇小论文。
各种算子对图像进行边缘检测效果的研究图像分割是根据需要将图像划分为有意义的若干区域或部分的图像处理技术。
通过边缘检测在Matlab 中实现方法,及用四叉数分解函数进行区域分割的方法,掌握了Matlab 区域操作函数的使用和图像分析和理解的基本方法,并学到了'roberts','sobel','prewitt','canny','log'算子对图像进行边缘检测的不同效果。
数字图像处理大作业报告
数字图像处理实验报告实验选题:选题二组员:学号:班级:指导老师:实验日期:2019年5月22日一、实验目的及原理1.识别出芯片的引脚2.熟悉并掌握opencv的某些函数的功能和使用方法原理:通过滤波、形态学操作得到二值图,再在二值图中设置条件识别引脚部分。
二、实现方案对图片滤波、调节阈值做边缘检测过滤掉一部分图片中干扰元素;然后通过膨胀、腐蚀操作来减少引脚的空心部分;再通过findContours()函数找到引脚的边缘并得到轮廓的点集,设置特定的长宽比和矩形面积识别引脚部分。
三、实验结果四、源码#include<iostream>#include<cmath>#include"opencv2/highgui/highgui.hpp"#include"opencv2/imgproc/imgproc.hpp"using namespace std;using namespace cv;int main(int argv, char **argc){//载入图片Mat srtImag = imread("2.jpg");Mat G_blur = srtImag.clone();//降噪blur(G_blur, G_blur, Size(5, 5));//imshow("降噪", G_blur);//Canny边缘检测Mat Canny_Imag = G_blur;Canny_Imag = Canny_Imag > 176;Canny(G_blur, Canny_Imag, 300, 50, 3);//imshow("边缘检测", Canny_Imag);//膨胀Mat element = getStructuringElement(MORPH_RECT, Size(10, 10));dilate(Canny_Imag, Canny_Imag, element);//imshow("膨胀", Canny_Imag);//腐蚀Mat element_1 = getStructuringElement(MORPH_RECT, Size(11, 11));erode(Canny_Imag, Canny_Imag, element_1);//imshow("腐蚀", Canny_Imag);//查找轮廓vector<vector<Point>>contours;vector<Vec4i>hierarchy;findContours(Canny_Imag, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);vector<vector<Point>> contour_s(contours.size());//该数组共有contours.size()个轮廓的点集vector<Rect> Rec_s(contours.size());//逼近多边形的点集数组//获得每个轮廓点集的逼近多边形的点集for (size_t i = 0; i < contours.size(); i++) {approxPolyDP(Mat(contours[i]), contour_s[i], 3,false);//contour_s存储逼近多边形的点集Rec_s[i]= boundingRect(contour_s[i]); //Rec_s存储最小包围矩形的点集}//筛选合适长宽比的矩形并将其画出来Mat result_Imag = srtImag.clone();for (size_t j = 0; j < contours.size(); j++) {double as_ra;//长宽比as_ra = Rec_s[j].height / Rec_s[j].width;if (as_ra > 3.3 && as_ra < 9.3 && Rec_s[j].area() > 20) { rectangle(result_Imag, Rec_s[j], Scalar(0, 255, 255), 2, 7);}}imshow("result", result_Imag);waitKey(0);return 0;}五、总结经过这次实验,我熟悉了对blur()、Canny()、dilate()、erode()、findContours()、approxPolyDP()等函数的使用,了解了Rect类的构成等。
(完整版)数字图像处理大作业
数字图像处理1.图像工程的三个层次是指哪三个层次?各个层次对应的输入、输出对象分别是什么?①图像处理特点:输入是图像,输出也是图像,即图像之间进行的变换。
②图像分割特点:输入是图像,输出是数据。
③图像识别特点:以客观世界为中心,借助知识、经验等来把握整个客观世界。
“输入是数据,输出是理解。
2.常用的颜色模型有哪些(列举三种以上)?并分别说明颜色模型各分量代表的意义。
①RGB(红、绿、蓝)模型②CMY(青、品红、黄)模型③HSI(色调、饱和度、亮度)模型3.什么是图像的采样?什么是图像的量化?1.采样采样的实质就是要用多少点来描述一幅图像,采样结果质量的高低就是用前面所说的图像分辨率来衡量。
简单来讲,对二维空间上连续的图像在水平和垂直方向上等间距地分割成矩形网状结构,所形成的微小方格称为像素点。
一副图像就被采样成有限个像素点构成的集合。
例如:一副640*480分辨率的图像,表示这幅图像是由640*480=307200个像素点组成。
2.量化量化是指要使用多大范围的数值来表示图像采样之后的每一个点。
量化的结果是图像能够容纳的颜色总数,它反映了采样的质量。
针对数字图像而言:采样决定了图像的空间分辨率,换句话说,空间分辨率是图像中可分辨的最小细节。
量化决定了图像的灰度级,即指在灰度级别中可分辨的最小变化。
数字图像处理(第三次课)调用图像格式转换函数实现彩色图像、灰度图像、二值图像、索引图像之间的转换。
图像的类型转换:对于索引图像进行滤波时,必须把它转换为RGB图像,否则对图像的下标进行滤波,得到的结果是毫无意义的;2.用MATLAB完成灰度图像直方图统计代码设计。
6789101112131415161718192021222324252627282930title('lady-lenna');if isrgb(a);b=rgb2gray(a);%RGB转换为灰度图像endsubplot(2,2,2);imshow(b);%显示图像title('ladygaga-lenna');[m,n]=size(a);%返回图像大小e=zeros(1,256);for k=0:255for i=1:mfor j=1:nif a(i,j)==ke(k+1)=e(k+1)+1;%灰度值相同的进行累加endendendendsubplot(2,2,4);bar(e);%画图像的灰度直方图title('灰度直方图');c=imrotate(a,20);%图像的旋转subplot(2,2,3);imshow(c);数字图像处理(第四次课)编写matlab函数,实现在医学图像中数字减影血管造影。
完整版数字图像处理作业题及部分答案
1.数字图像与连续图像相比具有哪些优点?连续图像f(x,y)与数字图像I(c,r)中各量的含义是什么?它们有何联系和区别? (To be compared with an analog image, what are the advantagesof a digital image? Let f(x,y) be an analog image, I(r, c) be a digital image, please giveexplanation and comparison for defined variables: f/I, x/r, and y/c)2.图像处理可分为哪三个阶段? 它们是如何划分的?各有什么特点? (We can divide image processing into 3 stages, what are they? how they are divided? What are their features?)答:低级处理---低层操作,强调图像之间的变换,是一个从图像到图像的过程;中级处理---中层操作,主要对图像中感兴趣的目标进行检测和测量,从而建立对图像的描述,是一个从图像到数值或符号的过程;高级处理---高层操作,研究图像中各目标的性质和相互联系,得出对图像内容含义的理解以及对原来客观场景的解释;3.试从结构和功能等角度分析人类视觉中最基本的几个要素是什么?什么是马赫带效应? 什么是同时对比度?它们反映了什么共同问题? (According to the structure and function of theeyes, what are the basic elements in human vision? What is the Mach Band Effect? What is Simultaneous Contrast? What common facts can we infer from both Mach Band Effect and Simultaneous Contrast?)答:人的视觉系统趋向于过高或过低估计不同亮度区域边界的现象称为“马赫带”效应;同时对比度指的是人的视觉系统对某个区域感觉到的亮度除了依赖于它本身的强度,还与背景有关. 马赫带效应和同时对比度现象表明人所感觉到的亮度并不是强度的简单函数.4.比较说明像素邻域、连接、通路以及连通基本概念的联系与区别。
数字图像处理大作业
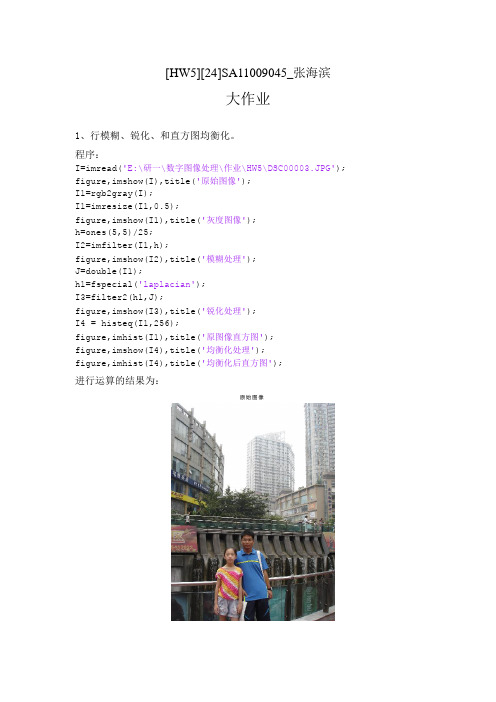
[HW5][24]SA11009045_张海滨大作业1、行模糊、锐化、和直方图均衡化。
程序:I=imread('E:\研一\数字图像处理\作业\HW5\DSC00003.JPG'); figure,imshow(I),title('原始图像');I1=rgb2gray(I);I1=imresize(I1,0.5);figure,imshow(I1),title('灰度图像');h=ones(5,5)/25;I2=imfilter(I1,h);figure,imshow(I2),title('模糊处理');J=double(I1);h1=fspecial('laplacian');I3=filter2(h1,J);figure,imshow(I3),title('锐化处理');I4 = histeq(I1,256);figure,imhist(I1),title('原图像直方图');figure,imshow(I4),title('均衡化处理');figure,imhist(I4),title('均衡化后直方图');进行运算的结果为:原始图像此为进行处理的原始图像。
进行图像灰度化并把图像的大小进行调整为原来的一半,得到图像:对图像分别进行均值滤波器模糊、拉普拉斯算子锐化处理,得到的结果如下图:方图如下所示。
2、边缘检测,程序:I=imread('F:\研一\数字图像处理\作业\HW5\DSC00003.JPG'); I1=rgb2gray(I);I1=imresize(I1,0.5);J=double(I1);H=[0 1 0;1 -4 1;0 1 0];J=conv2(J,H,'same');J=I1-J;subplot(1,2,1);imshow(I1),title('灰度图像');subplot(1,2,2);imshow(J),title('Laplace算子边缘检测');G1 = [-1 -2 -1;0 0 0;1 2 1];G2 = G1';Iedge=I1;I2x = filter2(G1,Iedge);I2y = filter2(G2,Iedge);I2=abs(I2x+I2y);I22 = mat2gray(I2);figure,imshow(mat2gray(abs(I2x))),title('水平方向边缘')figure,imshow(mat2gray(abs(I2y))),title('垂直方向边缘')figure,imshow(I22),title('合成边缘')IFB=im2bw(I22,0.08);figure,imshow(IFB),title('合成边缘二值图像')[m n]=size(I22);I2_edge=I22;for i=1:mfor j=1:nif I2_edge(i,j)>0.15I2_edge(i,j)=1;else if I2_edge(i,j)>0.06I2_edge(i,j)=0.5;endendendendfigure,imshow(I2_edge),title('边缘增强后的图像');可以得到Laplace 算子处理得到的边缘:灰度图像Laplace 算子边缘检测利用Sobel算子获得的图像的水平和垂直边缘。
数字图像处理作业(matlab)
第
2
页 共 13 页
图 3.3.1 原图效果
图 3.3.2 d0=5 时处理的效果
第
3
页 共 13 页
图 3.2.3
d0=15 的处理效果
图 3.2.4 d0=3.6 d0=150 的处理效果
第
4
页 共 13 页
图 2.3.7 d0=230 的处理效果
D(u, v) D0 轨迹为一个圆。
高斯低通滤波器的传递函数为:
H (u, v) e D
2
( u ,v ) / 2 2
第
1
页 共 13 页
其中 为标准偏差,通过令 Do 我们可以得到:
H (u, v) e D
2
( u ,v ) / 2 D02
当 D(u, v) D0 时,滤波器由最大值 1 降为 0.607. 3.2 程序 I1=imread('C:\Users\akhs\Desktop\美丽西电\1.jpeg'); %读取图像 figure; imshow(I1,[ ]); title('原图效果'); I=rgb2gray(I1); % 将图像变为灰度图象 %将灰度图像的二维不连续 Frourier 变换的零频率成分移到频谱的中心 s=fftshift(fft2(I)); [M,N]=size(s); % 分别返回 s 的行数到 M 中,列数到 N 中 n=2; % 对 n 赋初值 %GLPF 滤波,d0=5,15,30 ,80,150,230(程序中以 d0=5 为例) d0=5; % 初始化 d0 n1=floor(M/2); %对 M/2 进行取整 n2=floor(N/2); %对 N/2 进行取整 for i=1:M for j=1:N d=sqrt((i-n1)^2+(j-n2)^2); % 点(i,j)到傅立叶变换中心的距离 h=1*exp(-1/2*(d^2/d0^2)); %GLPF 滤波函数 s(i,j)=h*s(i,j); %GLPF 滤波后的频域表示 end end s=ifftshift(s); % 对 s 进行反 FFT 移动 %对 s 进行二维反离散的 Fourier 变换后,取复数的实部转化为无符号 8 位整数 s=uint8(real(ifft2(s))); figure; % 创建图形图像对象 imshow(s); % 显示 GLPF 滤波处理后的图像 title('GLPF 滤波(d0=5)'); % 为经 GLPF 滤波后的图像添加标题 3.3.运行结果 通过设置 do=5,15,30,80,150,230.针对不同图片可以得到如下效果:
华东政法大学计算机专业数字图像处理matlab作业
IFG=ifft2(G); imshow(IFG,[]); title(‘逆变换图像’); (2)h=imnoise(‘motion’,10,10); M=imfilter(f,h); M1=fft2(double(M))… 4、任意选择一幅图像,绘制图像的直方图。可以直接通过使用 imhist(I)来显示图像的直方图 I=imread(‘cameraman.tif’); imshow(I);title('原始图像'); b=size(I); %测量图像尺寸参数 a=zeros(1,256); %创建存放灰度出现概率的向量 for m=1:b(1) for n=1:b(2) a(I(m,n)+1)=a(I(m,n)+1)+1; %将灰度为 I(m,n) 的像素存储在 a (I(m,n)+1) 中, 因为 MATLAB 里没有 a(0); end end n=0:255; figure,bar(n,a); %绘制原始图像的直方图 title('原图像直方图');xlabel('灰度值');ylabel('出现概率 '); 6、读入图像将图像转化成二值图像。在一张图表上,显示原始图像、灰度图像,二值图像; [imm,map]=imread('trees.tif'); % imm 为 2 维矩阵、map 为 256*3 矩阵 figure, imshow(imm,map); % 显示原始图像(彩色) gmap = rgb2gray(map); figure, subplot(1,2,1),imshow(imm,gmap); % 显示灰度图像 subplot(1,2,2),imshow(im2bw(imm,map,0.4),[]); % 显示二值图像 注意:若输入图像是 3 维矩阵,则转化为灰度图像时为 gimm = rgb2gray(imm); 7、读入一幅图像(cameraman.tif) ,完成如下操作,并存储变换后的图像 (1)把图像翻转 90 及 180 度,并显示; (参考 imrotate 函数) (2)缩小图像 (3)切割图像(参考 incrop 函数) (4)镜像图像(如样图所示镜像效果) I=imread(‘cameraman.tif’); H=size(I); I2(1:H(1),1:H(2))=I(H(1):-1:1,1:H(2)); % 垂直翻转(垂直镜像) figure, imshow(I2); I3(1:H(1),1:H(2))=I(1:H(1),H(2):-1:1); % 水平翻转(水平镜像) figure,imshow(I3); I4(1:H(1),1:H(2))=I(H(1):-1:1,H(2):-1:1); % 对角镜像 figure,imshow(I4); 5、对同一场景但模糊程度不一样的三张数字图像绘制出其直方图,计算每一幅图像所有像素灰度的方差。 使用 imhist 求其直方图。计算像素灰度的方差: I=imread(); IG=rgb2gray(I); k=size(IG);
数字图像处理大作业
数字图像处理大作业学号:姓名:班级:数字图像处理作业用自己拍摄的图像,完成以下作业:1,用Matlab语言完成如下实验:1)打开一个BMP文件2)将其局部区域的灰度值进行改变3)另存为一个新的BMP文件2,Matlab编程实现图像傅立叶高通、低通滤波,给出算法原理及实验结果。
3,找一幅曝光不足的灰度(或彩色)图像,用Matlab按照直方图均衡化的方法进行处理。
4,用Matlab打开一幅图像,添加椒盐、高斯噪声,然后使用邻域平均法、中值滤波法进行平滑。
5,用Matlab打开一幅图像,利用Roberts梯度法、Sobel算子和拉普拉斯算子进行锐化,并比较结果。
以上作业,严禁抄袭。
作业请注明学号,姓名,班级,电话号码。
将纸质版于2012-06-06晚7:00交至B529房间。
1,用Matlab语言完成如下实验:1)打开一个BMP文件2)将其局部区域的灰度值进行改变3)另存为一个新的BMP文件%文件名为way01.bmp 源程序如下:clear all;f=imread('way.bmp');f1=rgb2gray(f); %ת»»Îª»Ò¶Èͼfigure(1);imshow(f1);imwrite(f1,'way01.bmp');f1(100:150,100:120)=256; %¾Ö²¿¸Ä±ä»Ò¶ÈÖµfigure(2);imshow(f1);运行结果为:注:源文件名为way.jpg2,Matlab编程实现图像傅立叶高通、低通滤波,给出算法原理及实验结果。
1)傅里叶高通滤波:源程序为:clear all;I=imread('way01.bmp');figure(1);imshow(I);I=double(I);f=fft2(I);g=fftshift(f);[M,N]=size(g);n1=floor(M/2);n2=floor(N/2);d0=5;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2);if d>=d0h1=1;elseh1=0;endg1(i,j)=(h1+0.5)*g(i,j);endendg2=ifftshift(g1);g3=uint8(real(ifft2(g2))); figure(2);imshow(g3);title('¸ßͨÂ˲¨½á运行结果为:2)傅里叶低通滤波:源程序为:clear all;I=imread('way01.bmp');figure(1);imshow(I);I=double(I);f=fft2(I); g=fftshift(f); [M,N]=size(g);n1=floor(M/2);n2=floor(N/2);d0=30;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2);if d<=d0h1=1;elseh1=0;endg1(i,j)=(h1+0)*g(i,j);endendg2=ifftshift(g1);g3=uint8(real(ifft2(g2))); figure(2);imshow(g3);title('µÍͨÂ˲¨½á¹û')运行结果为:3,找一幅曝光不足的灰度(或彩色)图像,用Matlab按照直方图均衡化的方法进行处理。
《数字图像处理》大作业
1. 图像处理与计算机图形学的区别与联系是什么?答:数字图像处理,是指有计算机及其它有关的数字技术,对图像施加某种运算和处理,从而达到某种预期的目的,而计算机图形学是研究采用计算机生成,处理和显示图形的一门科学。
两者区别:(1)研究对象不同,计算机图形学研究的研究对象是能在人的视觉系统中产生视觉印象的事物,包括自然景物,拍摄的图片,用数学方法描述的图形等,而数字图像处理研究对象是图像;(2)研究内容不同,计算机图像学研究内容为图像生成,透视,消阴等,而数字图像处理研究内容为图像处理,图像分割,图像透析等;(3)研究过程不同,计算机图像学是由数学公式生成仿真图形或图像,而数字图像处理是由原始图像处理出分析结果,计算机图形与图像处理是逆过程。
两者的联系:图像处理需图形学的交互手段,图形学需要图像处理合成图像,两者有重叠。
2. 图像数字化过程中的失真有那些原因?就在减少图像失真和减少图像的数据量两者之间如何取得平衡,谈谈个人的看法。
答:图像数字化过程中失真的原因主要来自三个方面:一.采样频率太低,即未满足采样定理而造成的失真;二.外部和内部噪声的影响,例如外部的电磁波、机械运动等;三.用有限个灰度值表示自然界无限连续的灰度值必然造成失真,为了减小失真必然增加采样点,即增加图像数据量。
在减少图像失真和减少图像的数据量两者之间取得平衡,要根据图像需求保留有用信息,如军事图像只需保留反应地形地貌及目标的信息,普通照片只需满足视觉要求即可。
3. 一幅模拟彩色图像经平板扫描仪扫描后获得一幅彩色数字图像,其分辨率为1024×768像素。
若采用RGB彩色空间,红、绿、蓝三基色的灰度等级为8比特,在无压缩的情况下,在计算机中存储该图像将占用多少比特的存储空间?当用Photoshop图像处理软件去掉图像的彩色信息,只留下灰度信息,灰度等级为4比特,在无压缩的情况下,存储该图像将占用多少字节的存储空间?答:(1)采用RGB彩色空间,红、绿、蓝三基色的灰度等级为8比特,在无压缩的情况下,占存储空间大小为:1024×768×8×3=18874268bit=2.25MB(2)去掉彩色信息,只留下灰度信息,灰度等级为4比特,在无压缩的情况下,所占的存储空间大小为:1024×768×4 =3145728bit=0.375MB4. 试设计一个程序实现nn 的中值滤波器,当模板中心移过图像中每个位置时,设计一种简便的中值更新方法。
尹其畅 数字图像处理大作业
《数字图像处理》大作业——车牌识别(车牌定位和字符分割部分)学院:电子与控制工程学院专业:交通信息工程及控制学号:****************任课教师:***车牌识别系统1 车牌识别系统1.1车牌识别系统的概述目前随着科技和经济的日益发展,智能交通系统在世界范围内引起重视,我国已经将其列入科技计划重点实施。
智能交通系统是交通发展的必然趋势,而车牌识别系统是智能交通系统中的重要组成部分。
该系统可以记录十字路口违章车辆,实现高速公路,收费路口,停车场等地的收费。
既减少了人力,又节约了时间,还提高了效率。
车牌识别系统的主要任务是分析和处理摄取到的复杂背景下的车辆图像,定位分割牌照,最后自动识别汽车牌照上的字符,LPR是利用车辆牌照的唯一性来识别和统计车辆,它是以数字图像处理、模式识别、计算机视觉等技术为基础的智能识别系统。
在现代化交通发展中车牌识别系统是制约交通系统智能化、现代化的重要因素,LPR系统应该能够从一幅图像中自动提取车辆图像,自动分割牌照图像,对字符进行正确识别,从而降低交通管理工作的复杂度。
车牌字符识别的实质是对车牌上的汉字、字母和数字进行快速准确的识别并以字符串的形式输出识别结果,字符识别技术是整个车牌识别系统的关键。
车牌识别系统与其它图像识别系统相比较而言要复杂的多,在字符识别中,汉字识别是最难也是最关键的部分,很多国外较为成熟的车牌识别系统无法进入中国市场的原因就在于无法有效的识别汉字。
1.2车牌识别系统的结构和工作原理车牌识别技术的任务是处理、分析摄取的车辆图像,实现车牌号码的自动识别。
典型的车辆牌照识别系统是由图像采集系统、中央处理器、识别系统组成,一般还要连接相应的数据库以完成特定的功能。
当系统发现(通过埋地线圈或者光束检测)有车通过时,则发出信号给图像采集系统,然后采集系统将得到的图像输入识别系统进行识别,其识别结果应该是文本格式的车牌号码。
图1.1 车牌识别系统原理图车牌整体识别过程大体可分为四个步骤:图像预处理、车牌定位和分割、车牌字符分割和车牌字符识别。
数字图像处理作业答案
1 大作业题目1.问答题1.1连续图像f(x.y)和数字图像I(r,c)中各分量的含义是什么?他们有什么联系和区别?取值范围在什么范围?答:f(x,y)表示二维图像在空间XY中一个坐标点的位置(实际图像的尺寸是有限的,所以x和y的取值也是有限的),即f(x,y)中的x,y分别代表一个点连续图像中的x轴和y轴的坐标,而f则代表图像在点(x,y)的某种性质F的数值(实际图像中各个位置上所具有的性质F的取值也是有限的,所以F得取值也是有限的)。
F,x,y的值可以是任意实数。
图像在点(x,y)也可以有多重性质,此时可用矢量f来表示。
数字图像I(r,c)表示位于图像矩阵上第r行,第c列的元素幅值。
其中I,c,r的值都是整数。
I(r,c)是通过对f(x,y)抽样和量化得来的,f(x,y)各量是连续的,I(r,c)各量是离散的,这里的I代表离散化后的f,(r,c)代表离散化后的(x,y),r,c分别有连续图像中的x,y分别采样得到的;x,y可以取所有的非负数,r,c可以取所有的非负整数。
1.2 发光强度及亮度、照度各有什么不同?答:1)发光强度,单位坎德拉,即cd。
定义:光源在给定方向的单位立体角中发射的光通量定义为光源在该方向的发光强度。
解释:发光强度是针对点光源而言的,或者发光体的大小与照射距离相比比较小的场合。
这个量是表明发光体在空间发射的会聚能力的。
可以说,发光强度就是描述了光源到底有多“亮”,因为它是光功率与会聚能力的一个共同的描述。
发光强度越大,光源看起来就越亮,同时在相同条件下被该光源照射后的物体也就越亮,因此,早些时候描述手电都用这个参数。
常见光源发光强度:太阳,2.8E27cd,高亮手电,10000cd,5mm超高亮LED,15cd。
2)亮度,单位尼特,即nt。
定义:单位光源面积在法线方向上,单位立体角内所发出的光流。
解释:这个是最容易被误解的概念了。
亮度是针对光源而言,而且不是对点光源,是对面光源而言的。
数字图像处理大作业
姓名: 学号:专业: 通信工程 科目:数字图像处理日期:2014年6月5日数字图像处理课程设计低通滤波器滤去灰度图片的椒盐噪声一、数字图像处理的简介数字图像处理(Digital Image Processing)是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。
数字图像处理的产生和迅速发展主要受三个因素的影响:一是计算机的发展;二是数学的发展(特别是离散数学理论的创立和完善);三是广泛的农牧业、林业、环境、军事、工业和医学等方面的应用需求的增长。
二、数字图像处理的发展概况1920年代的Bartlane 电缆图片传输系统(无计算机时代)1960年代的空间探测器发回的图像畸变校正系统(计算机技术引入到空间项目的开发当中)1970年代的计算机断层扫描图像重建技术三、题目要求设计一个低通滤波器,给一幅有椒盐噪声的灰度图像滤波。
按照题目的要求,简要介绍算法,并对算法进行分析。
用MATLAB 完成算法代码(不能利用MATLAB 自身的图像处理函数完成具体算法,读写和显示可以利用MATLAB 函数),注释要清晰。
给出代码运行的结果,并对结论进行总结。
四、关于图像强化和数字滤波器的基础知识1、频率域图像增强技术简介频率域图像增强时增强技术的重要组成部分,通过傅里叶变换,可以把空间域混叠的成分在频率域中分离出来,从而提取或滤去相应的图像成分。
这一过程中的核心基础即为傅里叶变换。
二维离散傅里叶变换定义为:N vy ux j N x N y e x f N v u F /)(2101)(1),(+--=-=∑∑=π,式中,1,,2,1,0;1,,2,1,0-=-=N v N u 。
二维离散傅里叶反变换:Nvy ux j N u N v ev u F Ny x f /)(2101),(1),(+-=-=∑∑=π,式中,1,,1,0,1,,1,0-=-=N y N x 。
2、频率域平滑滤波器图像空间域的线性领域卷积实际上是图像经过滤波器对信号频率成分的滤波,这种功能也可以再变换域实现,即把原始图像进行正变换,设计一个滤波器用点数操作的方法加工频谱数据,然后再进行反变换,即完成处理工作。
数字图像处理处理大作业实验报告
数字图像处理处理大作业实验报告数字图像处理处理大作业实验报告PB11210***上上签MyZenith.N_3104_EVER实验一题目:线性插值改变图像大小实验目的:1、使用MATLAB编程实现对图片大小的改变操作,使所给图片达到所要求的效果。
2、通过对MATLAB的编程加强对图像处理的认识,初步学习MATLAB在图像处理中的基本应用实验内容:在这一项目中,同学们需要实现基于双线性插值的图像缩放算法。
作业中需实现如下功能:(a) 能够利用鼠标从实验图像中任意选取测试区域,并单独显示。
(b) 使用双线性插值算法对测试区域进行缩放处理,输出如下结果,放大到原始分辨率的2倍,放大到原始分辨率的4倍,缩小到原始分辨率的1/2倍。
实验原理:图像某点的值由最邻近的四个点联立方程决定。
实验代码:1、在主函数中,使用switch函数分别调用子函数,并且之前选择需要放大或者缩小的倍数。
代码如下:2、 choice=('Yes');3、4、5、6、7、8、while (minus(choice,('Yes'))==0) clear;close;F=imread('monarch.bmp'); I=imcrop(F); BR=I(:,:,1); BG=I(:,:,2); BB=I(:,:,3); [rows,cols]=size(BR);K = sqrt(str2double(inputdlg('·?±???', 'INPUT scalefactor', 1, {'2'})));9、 width = K * rows;10、 height = K * cols;11、12、13、14、 widthScale = rows/width;15、 heightScale = cols/height;16、17、 for x = 1:width-2for y = 1:height-218、 X = x * widthScale;Y = y * heightScale;19、20、 if (X/double(uint16(X)) == 1.0) && (Y/double(uint16(Y)) == 1.0) 21、 dstBR(x,y) = BR(int16(X),int16(Y));dstBG(x,y) = BG(int16(X),int16(Y));22、 dstBB(x,y) = BB(int16(X),int16(Y)); 23、 else24、 a = double(uint16(X));25、 b = double(uint16(Y));26、27、28、29、30、BRx11 = double(BR(a,b)); BRx12 = double(BR(a,b+1)); BRx21 = double(BR(a+1,b)); BRx22 = double(BR(a+1,b+1));31、32、 BGx11 = double(BG(a,b));33、 BGx12 = double(BG(a,b+1));34、 BGx21 = double(BG(a+1,b));35、 BGx22 = double(BG(a+1,b+1));36、37、38、39、40、BBx11 = double(BB(a,b)); BBx12 = double(BB(a,b+1)); BBx21 = double(BB(a+1,b)); BBx22 = double(BB(a+1,b+1));41、42、 w1 = (b+1-Y) * (a+1-X); 43、 w2 = (Y-b) * (a+1-X);w3 = (b+1-Y) * (X-a);44、 w4 = (Y-b) * (X-a); 45、 dstBR(x,y) = uint8( BRx11 * w1 + BRx12 * w2 + BRx21* w3 + BRx22 * w4 );46、 dstBG(x,y) = uint8( BGx11 * w1 + BGx12 * w2 + BGx21* w3 + BGx22 * w4 );47、 dstBB(x,y) = uint8( BBx11 * w1 + BBx12 * w2 + BBx21* w3 + BBx22 * w4 );48、 end49、 end50、 end51、52、53、54、55、56、57、OUT(:,:,1)=dstBR; OUT(:,:,2)=dstBG; OUT(:,:,3)=dstBB;imshow(I); figure; imshow(OUT);58、59、60、61、62、options.Interpreter = 'tex'; options.Default = 'Cancel'; choice = questdlg('??·','????','Yes','No',options); end实验结果:1、选择缩放倍数:2、所选择的图像源文件如下:3、用鼠标标定所需要进行缩放的区域:4、程序正常运行后缩放效果:4倍放大5、程序正常运行后缩放效果:2倍放大6、程序正常运行后的缩放效果:缩小一倍实验二题目:高斯滤波及中值滤波处理人为添加的椒盐噪声和高斯噪声实验目的:1、对所给定的图像使用MATLAB添加高斯噪声和椒盐噪声;2、再用MATLAB程序实现中值滤波和高斯滤波;3、计算所得到结果图像的PSNR,对它们进行分析与比较,从而理解各种滤波方法的优点与特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字图像处理大作业
[HW5] [编号51] 学号:SC11009018 刘志辉
(1)程序代码
%灰度图像转换
RGB=imread('lzh.jpg');
subplot(3,3,1);imshow(RGB);title('原始图像');
Y=imresize(RGB,[480 640]);
subplot(3,3,2);imshow(Y);title('缩小后的图像');
I=rgb2gray(Y);
%I1=double(I);
subplot(3,3,3);imshow(I);title('灰度图像');
%均值滤波
K1=filter2(fspecial('average',5),I)/255;
subplot(3,3,4);imshow(K1);title('5*5均值滤波图像');
%锐化
a=1;
W1=[0 -a 0;-a 1+4*a -a;0 -a 0];
rh=imfilter(I,W1,'symmetric','conv');
subplot(3,3,5);imshow(rh);title('拉普拉斯锐化图像');
%直方图均衡化
J=histeq(I);
subplot(3,3,6);imshow(I);title('原始灰度图像');
subplot(3,3,7);imhist(I);title('原始图像直方图');axis([0 255 0 7000]);
subplot(3,3,8);imshow(J);title('均衡化后的图像');
subplot(3,3,9);imhist(J);title('均衡化后的直方图');axis([0 255 0 7000]);
处理结果图:
(2)程序代码
%边缘检测
BW1=edge(I,'sobel');
BW2=edge(I,'prewitt');
BW3=edge(I,'roberts');
subplot(2,2,1);imshow(I);title('原始灰度图像');
subplot(2,2,2);imshow(BW1);title('sobel边缘检测图像'); subplot(2,2,3);imshow(BW2);title('prewitt边缘检测图像'); subplot(2,2,4);imshow(BW3);title('roberts边缘检测图像');
运行结果:
(3)程序代码
%数字分割
RGB=imread('lzh.jpg');
Y=imresize(RGB,[480 640]);
I=rgb2gray(Y);
figure;imshow(I);title('原始灰度图像');
I1=im2bw(I,0.7);
figure;imshow(I1);title('二值化图像');
I2=edge(I1,'roberts',0.09,'both');
figure;imshow(I2);title('roberts边缘检测图像');
se=[1;1;1]; %线型结构元素
I3=imerode(I2,se); %腐蚀图像
figure,imshow(I3),title('腐蚀后边缘图像');
se=strel('rectangle',[25,25]); % 矩形结构元素
I4=imclose(I3,se);%图像聚类、填充图像
figure;imshow(I4),title('填充后图像');
I5=bwareaopen(I4,2500);%去除聚团灰度值小于2500的部分figure,imshow(I5),title('形态滤波后图像');
[y,x,z]=size(I5);
I6=double(I5);
Y1=zeros(y,1);
for i=1:y
for j=1:x
if(I6(i,j,1)==1)
Y1(i,1)= Y1(i,1)+1;
end
end
end
[temp MaxY]=max(Y1);
figure,plot(0:y-1,Y1),title('行方向像素点灰度值累计和'),xlabel('行值'),ylabel('像素'); %求的车牌的行起始位置和终止位置
PY1=MaxY;
while ((Y1(PY1,1)>=50)&&(PY1>1))
PY1=PY1-1;
end
PY2=MaxY;
while ((Y1(PY2,1)>=50)&&(PY2<y))
PY2=PY2+1;
end
IY=I(PY1:PY2,:,:);
X1=zeros(1,x);
for j=1:x
for i=PY1:PY2
if(I6(i,j,1)==1)
X1(1,j)= X1(1,j)+1;
end
end
end
figure,plot(0:x-1,X1),title('列方向像素点灰度值累计和'),xlabel('列值'),ylabel('像数'); %求的车牌的列起始位置和终止位置
PX1=1;
while ((X1(1,PX1)<3)&&(PX1<x))
PX1=PX1+1;
end
PX2=x;
while ((X1(1,PX2)<3)&&(PX2>PX1))
PX2=PX2-1;
End
%分割出车牌图像
PX1=PX1-1;
PX2=PX2+1;
dw=I(PY1:PY2,PX1:PX2,:);
figure,imshow(dw),title('定位剪切后的车牌图像');
I7=im2bw(dw,0.5);
figure;imshow(I7);title('二值化图像');
I8=bwareaopen(I7,25);
figure;imshow(I8),title('形态学滤波后的二值化图像');
[y1,x1,z1]=size(I8);
X1=zeros(1,x1);
I9=double(I8);
for j=1:x1
for i=1:y1
if(I9(i,j,1)==1)
X1(1,j)= X1(1,j)+1;
end
end
end
figure;plot(0:x1-1,X1),title('列方向像素点灰度值累计和'),xlabel('列值'),ylabel('累计像素量');
Px0=1;
Px1=1;
%分割字符
for i=1:7
while ((X1(1,Px0)<2)&&(Px0<x1))
Px0=Px0+1;
end
Px1=Px0;
while (((X1(1,Px1)>=2)&&(Px1<x1))||((Px1-Px0)<10)) Px1=Px1+1;
end
Z=I9(:,Px0:Px1,:);
switch strcat('Z',num2str(i))
case 'Z1'
PIN0=Z;
case 'Z2'
PIN1=Z;
case 'Z3'
PIN2=Z;
case 'Z4'
PIN3=Z;
case 'Z5'
PIN4=Z;
case 'Z6'
PIN5=Z;
otherwise
PIN6=Z;
end
figure(13);
subplot(1,7,i);
imshow(Z);
Px0=Px1; End。