PMC功能指令表
功能指令说明(FANUC 0i-PMC)
张俊基笔记(功能指令说明)FANUC oi系统——PMC-功能指令编号缩写注释SUB1END1第一级顺序程序结束SUB2END2第二级顺序程序结束SUB3TMR可变定时器,其设定的时间在屏幕的定时器画面中显示和设定ACT=启动信号SUB4DEC译码,当从译码地址读取的BCD码与译码指令中的给定值对比,一致输出“1”,不同输出“0”。
主要用于M或T功能的译码SUB5CTR计数器,可作预置型,环型,加/减计数器,并可选择1或0作为初始值CN0=初始值选择UPDOWN=加/减计数选择RST=复位SUB6ROT旋转控制,用于回转控制,如刀架,旋转工作台等RN0=转台的起始号1或0BYT=位置数据的位数DIR=是否执行旋转方向短路径选择POS=选择操作条件INC=选择位置数或步数SUB7COD代码转换,将BCD代码转换为两位或四位BCD数字SUB8MOVE逻辑乘数数据传送,将逻辑乘数与输入数据进行进行逻辑乘,结果输出到指定地址。
也可从输入地址中,八位信号中,排除不要的位数SUB9COM公共线控制,控制直到公共结束指令(COME)范围内的线圈工作SUB10JMP跳转,用梯形图程序的转移。
当执行时,跳至跳转结束指令(JMPE)而不执行与JMP指令之间的梯形图SUB11PARI奇偶校验,对数据进行奇偶校验,检测到异常时输出报警O.E=0时,偶数校验;O.E=1时,奇数校验SUB14DCNV数据转换,将二进制码转换为BCD码或将BCD码转换为二进制码CNV=0时,二进制码转换为BCD码;NCV=1时,BCD码转换为二进制码SUB15COMP数值大小判别,将输入值与比较值进行比较来判别大小。
输入值小于等于比较值,则输出为1BYT=0时,处理数据为两位BCD;BYT=1时,四位BCDSUB16COIN一致性检测,检测输入值与比较值是否一致。
此指令只适用于BCD数据SUB17DSCH数据检索,在数据表(D)中搜索指定的数据,如未找到指定数据,则输出为1 SUB18XMOV变址数据传送,读取或改写数据表(D)中的内容RW=0时,读出;RW=1时,写入SUB19ADD加法运算,BCD码两位或四位数据相加;运算结果超过加数指定格式,输出置1SUB20SUB减法运算,BCD码两位或四位数据相减;运算结果为负,输出置1SUB21MUL乘法运算,BCD码两位或四位数据相乘;运算结果超过加数指定的格式,输出置1SUB22DIV除法运算,BCD码两位或四位数据相除除数为0,输出置1SUB23NUME定义常数,用于指定常数SUB24TMRB固定定时器,设定时间在编程时确定,不能通过定时器画面修改SUB25DECB二进制译码,可对1,2或4个字节的二进制代码数据译码。
PMC功能指令
种类设定时间范围备注1msec 1msec~32.7秒8msec 8msec~262.1秒定时器9以上初始值10msec 10msec~327.7秒48msec 48msec~1572.8秒定时器1~8初始值100msec 100msec~54.6分1秒1秒~546分1分1分~546小时定时器的定时器精度,对应存储在T9000~T9499中,设值含义如下:0 :缺省(8msec/48msec)1 :1msec2 :10msec3 :100msec4 :1秒5 :1分【输出】W1 :ACT接通后,经过定时器设定的时间后,输出即接通为1。
【使用范例】X0.0接通后再经过100ms,R0.0就接通为1。
“精度”由T9000~T9499来决定,每个计数器占两个字节,同时也对应T9000~T9499的相应两字节为“精度”设定地址,依次类推。
对于1号计数器,对应为T9000~T9001设定精度,如果T9000~T9001为0,则精度按缺省处理,为48ms。
范例中T9000=3,即精度等级为100,在此条件下,“设定时间”必须是100的倍数。
【使用范例】·X0.0接通3秒之后,R0.0输出为1。
·在任意时间一旦X0.0为0,R0.0马上为0。
延时定时器(上升沿触发):SUB54/TMRC定时器精度范围扩展为以分为单位,可作为长时间定时器使用。
在控制参数中可以自由的指定定时器设定时间地址,所以没有定时器个数限制。
【控制条件】ACT =0 : 定时器输出W1为0=1 : 启动定时器【控制参数】定时器精度 : 种类 定时器精度设定时间范围 1msec 5 1msec~32.7秒 8msec 0 8msec~262.1秒 10msec 6 10msec~327.7秒 48msec 1 48msec~1572.8秒 100msec 7 100msec~54.6分 1秒 2 1秒~546分 10秒 3 10秒~91小时 1分4 1分~546小时SUB54 TMRCACT定时器精度定时器设定时间地址 定时器寄存器地址W1设定时间ACTW1【定时器设定时间地址】:指定用于存储定时器设定值2字节长地址的首地址。
pmc功能指令解析
RN0 0:转台位置号从0开始 1:转台位置号从1开始 DIR 0:旋转方向不选择,正向 1:判断旋转方向 POS 0:计算目标位置 1:计算目标前一个位置(需要提前减速控制时采用) INC 0:计算位置数
奇偶校验指令
在FANUC标准面板上的倍率开关上都有一位信号作为校验位而存在,我们可以取样这个信 号进行开关信号的掉线检测处理。同样的指令也可以应用在刀塔的编码器反馈刀位检测上。
OE:0 偶校验 1 奇校验 RST:复位错误信号输出 ACT:指令执行 W1 :1 错误输出
校验数据地址:校验指令只对一个字节的数据寄存器进行校验检查
三:数据比较指令 二进制大小判别指令
指定格式:
输出结果:R9000#0=1 输入制=比较值 R9000#1=1 输入值<比较值 输入地址:取决于指定格式
பைடு நூலகம்
数值大小判别
数值大小
BYT=0 处理的数据为2位BCD BYT=1 处理的数据为4位BCD 控制条件 ACT=1 执行动作 输入数据的格式 0:常数
UPDOWN=1 减计数
RST 清除计数值 ACT 计数条件,高电平计数
指令变量 计数器预置值地址 双字节地址存放预置值 计数器寄存器地址 四字节地址存放计数值
(一般使用D寄存器)
计数器的工件计数例
二:数据传送语句
二进制附值语句
格式指定:1:一个字节 2:两个字节 4:四个字节
常数:附值常数,十进制形式。
功能指令(以随机换刀为例)
PMC梯形图功能指令集合带注解.
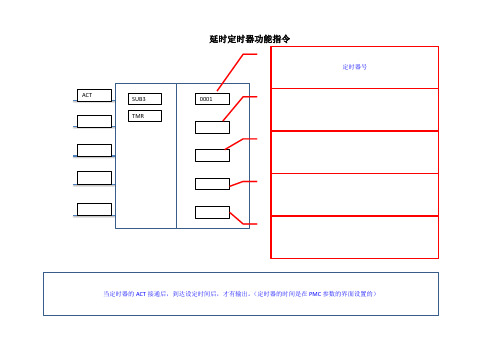
SUB3 TMR0001定时器号ACT当定时器的ACT 接通后,到达设定时间后,才有输出。
(定时器的时间是在PMC 参数的界面设置的)SUB24 TMRB00015000定时器号设定时间ACT当定时器的ACT 接通后经过5秒,才有输出。
(定时器的时间是在PMC 参数的界面设置的)SUB54TMRCD0100R200定时器精度定时器设定时间地址(该地址用来存放设定时间的值)定时器寄存地址(系统使用的作业区域需要4字节)ACT当定时器的ACT接通后经过定时器设定时间地址中设定的时间后,才有输出。
(定时器的时间地址是在PMC参数的界面设置的)译码功能指令SUB4 DECR3000311代码信号的地址译码指示前两位是值指示:指示进行译码的数值。
后两位是位数指示:01 只对低位数经行译码 10 只对高位数进行译码 11 对两位数均进行译码ACT对2 位的BCD 码进行译码,当ACT 接通时,如果R0300为00000011(3)则有输出。
二进制译码功能指令SUB25 DECB4F0100003R100形式指定:1 1字节长 2 2字节长 4 4字节长代码信号地址:指定进行译码数据的起始地址译码指示:8个译出代码号的第一个号译码结果输出地址:由译码指示指定号的译码结果被输出到位0,号+1 的译码结果被输出到位1,号+7的译码结果被输到位7。
ACT对1、2、4字节长的二进制形式的代码数据进行译码。
代码数据一致时,对应的位即为“1”。
当ACT 接通时,对F0010~F0013的4字节进行译码,当译出结果在3 到10的范围内时,与R0100对应的位变为1。
加/减计数环型计数功能指令SUB55 CTR 01计数器号该计数器的初始值在PMC参数设置中CN0UPDOWNRSTACTCN0:0 计数器初始值为0 1 计数器的初始值为1。
UPDOWN:0 是加计数器(初始值为CN0 设定)1 减计数器(初始值为计数器预置值)RST:将计数器复位。
高效操作PMC功能指令详解(六)比较指令二

高效操作PMC功能指令详解(六)比较指令二FANUC数控技术的各位朋友们,在上个月我们为大家推出了系统常见问题排查的系列,是不是很有帮助呢?本月起,我们要推出一个新主题——常用PMC功能指令介绍。
希望学习PMC编程或者正为梯形图所困的你,一定可以通过这一系列的介绍有所收获!PMC比较指令如下:序号指令名称功能号功能1 EQB 200 1字节二进制比较(=)2 EQW 201 2字节二进制比较(=)3 EQD 202 4字节二进制比较(=)4 NEB 203 1字节二进制比较(≠)5 NEW 204 2字节二进制比较(≠)6 NED 205 4字节二进制比较(≠)7 GTB 206 1字节二进制比较(>)8 GTW 207 2字节二进制比较(>)9 GTD 208 4字节二进制比较(>)10 LTB 209 1字节二进制比较(<)11 LTW 210 2字节二进制比较(<)12 LTD 211 4字节二进制比较(<)13 GEB 212 1字节二进制比较(≥)14 GEW 213 2字节二进制比较(≥)15 GED 214 4字节二进制比较(≥)16 LEB 215 1字节二进制比较(≤)17 LEW 216 2字节二进制比较(≤)18 LED 217 4字节二进制比较(≤)19 RNGB 218 范围比较(1字节)20 RNGW 219 范围比较(2字节)21 RNGD 220 范围比较(4字节)22 COMPB 32 二进制数值大小判别23 COMP 15 数值大小判别24 COIN 16 一致性检测13GEB(1字节二进制比较(≥):SUB 212)14GEW(2字节二进制比较(≥):SUB 213)15GED(4字节二进制比较(≥):SUB 214)这组指令用于比较数据1是否大于等于数据2,根据操作数的字节不同分为3种指令:指令名称指令号数据类型13 GEB 212 1字节长度数据14 GEW 213 2字节长度数据15 GED 214 4字节长度数据指令格式:控制条件:(a) 输入信号(ACT)ACT=0:指令不执行,输出W1=0。
PMC常用功能指令
59
CALL SUB 65
有条件子程序调出
×○
60
CALLU SUB 66
子程序调出 × ○
61
SP
SUB 71
子程序开始
×○
62
SPE
SUB 72
子程序结 束 × ○
此外,还有DISP, FNC90, MMCWR, MMCWW, MMC3R, MMC3W, PSGN, PSGN2, AXCTL命令。
取0到1的前沿进行计数。 是计数结束输出。加计数时为最大值,减计数最小值时为1。
〔计数器号〕RB4,RB6/RC4为1~50 其它为1~20
计数器号
·“ON”是常“1”信号。 ·从1~10进行计数的计数器。 ·当X000.0为“1”时,计数器即复位到“1”。 ·在X000.1的上升沿,计数器加1。 ·计数器的值达最大值10时,R000.0变为“1”。
〔代码信号地址〕指定译码对象的地址。 〔译码指示〕
位数指示01:只对低位数进行译码。 10:只对高位数进行译码。 11:对2位数均进行译码。
值指示:指示进行译码的数值。
代码信号的地址 译码指示
·在X000.0接通时,如R0300为00000011(3)则R000.0接通。
158
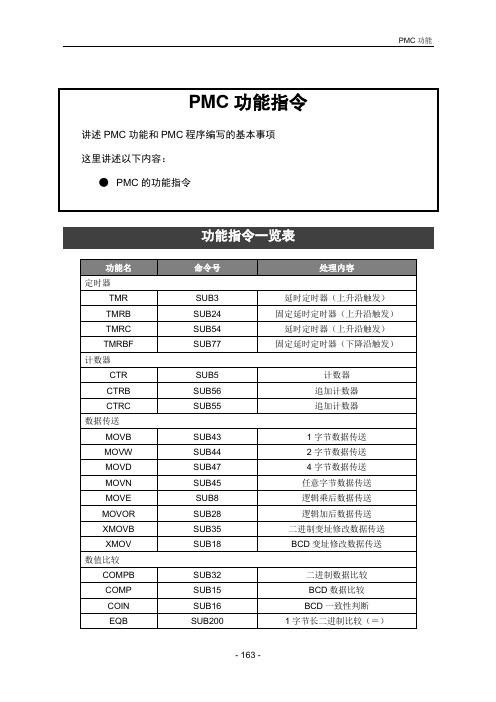
PMC功能
对1、2、4字节长的二进制形式的代码数据进行译码。代码数据一致时, 二进制译码 对应的位即为“1”,如不一致则为“0”。
47 NUMEB SUB 40
二进制常数赋值
○○
48
DISPB SUB 41
信息显 示 ○ ○
49
EXIN
SUB 42
外部数据输入
○○
50
WINDR SUB 51
FANUCPMC功能指令详解(04):数据传送二
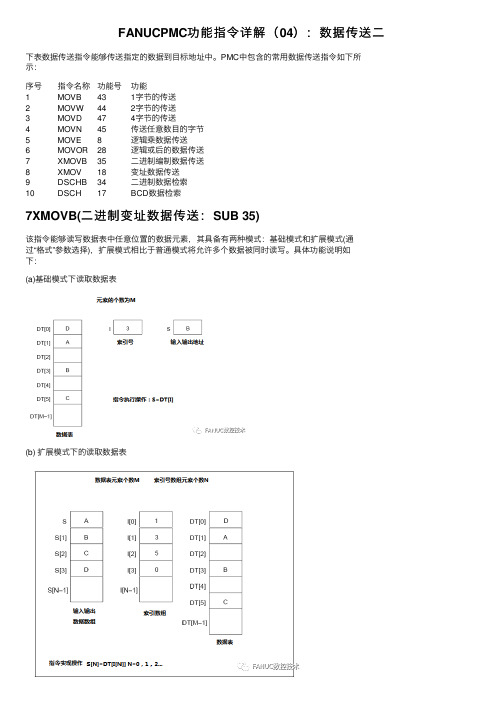
FANUCPMC功能指令详解(04):数据传送⼆下表数据传送指令能够传送指定的数据到⽬标地址中。
PMC中包含的常⽤数据传送指令如下所⽰:序号指令名称功能号功能1MOVB431字节的传送2MOVW442字节的传送3MOVD474字节的传送4MOVN45传送任意数⽬的字节5MOVE8逻辑乘数据传送6MOVOR28逻辑或后的数据传送7XMOVB35⼆进制编制数据传送8XMOV18变址数据传送9DSCHB34⼆进制数据检索10DSCH17BCD数据检索7XMOVB(⼆进制变址数据传送:SUB 35)该指令能够读写数据表中任意位置的数据元素,其具备有两种模式:基础模式和扩展模式(通过“格式”参数选择),扩展模式相⽐于普通模式将允许多个数据被同时读写。
具体功能说明如下:(a)基础模式下读取数据表(b) 扩展模式下的读取数据表(c) 基础模式下写数据表(d) 扩展模式下写数据表指令格式:(a) 基本模式(b) 扩展模式控制条件:(a) 读、写指令(RW)RW=0:从数据表中读数据。
RW=1:从数据表中写数据。
(b) 重置(RST)RST=0:⾮重置状态。
RST=1:重置,W1=0。
(c) 执⾏指令(ACT)ACT=0:不执⾏XMOVB,不改变W1状态。
ACT=1:执⾏XMOVB。
参数:(a) 格式指定基本模式下,该参数指定数据表中元素的长度。
0001:1字节数据。
0002:2字节数据。
0004:4字节数据。
扩展模式下,除了在第⼀位上设定1、2、4的字节长度外还需要设定参数的第2、3位,⽤于决定读取的元素个数,第4位保持0。
0nn1:读取nn个数据表元素,单个元素长度为1字节。
0nn2:读取nn个数据表元素,单个元素长度为2字节。
0nn4:读取nn个数据表元素,单个元素长度为4字节。
元素个数nn从00-99,但是设定为00、01时效果与基本模式下⼀样。
(b) 数据表容量地址设定数据表容量,根据指定元素数据长度来选择,其设定范围为:1字节元素:1⾄255。
FANUC PMC功能详细介绍

PMC功能讲述PMC功能和PMC程序编写的基本事项这里讲述以下内容:●PMC的基本功能●功能指令一览●种类编程语言梯形图级数 3 3 第一级执行周期4/8msec基本指令处理速度25nsec/step 1μsec/stepI/O Link最大信号点数2048/2048 1024/1024 0i-D ○○B 0i-Mate D —○T地址范围T0~T499,T9000~T9499 T0~T79,T9000~T9079C地址范围C0~C399,C5000~C5199 C0~C79,C5000~C5039K地址范围K0~K99,K900~K999 K0~K19,K900~K999D地址范围D0~D9999 D0~D2999A地址范围A0~A249,A9000~A9249 A0~A249,A9000~A9249 基本规格16字符符号扩展规格40字符基本规格30字符指令扩展规格255字符“○B”为软件包B包的标准配置。
I/O Link第二通道功能,为选项功能,需要指定。
使用符号和指令扩展规格时,需要使用FANUC LADDER-III软件。
系统信号#7 #6 #5 #4 #3 #2 #1 #0 地址R9091 FL FL2 RUN ON OFF FL :1秒周期信号(ON/OFF 比1:1)FL2 :0.2秒周期信号(ON/OFF 比1:1)RUN :PMC运行ON :常1信号OFF :常0信号#7 #6 #5 #4 #3 #2 #1 #0 地址R9015 STPR RUNR STPR :梯形图停止信号RUNR :梯形图运行信号梯形图运行状态扫描周期梯形图运行开始信号R9015.0梯形图停止信号R9015.1梯形图运行状态R9091.2PMC的数据形式分为二进制形式、BCD码形式和位型三种。
CNC和PMC间的接口信号为二进制形式。
一般来说,PMC数据也采用二进制形式。
●带符号的二进制形式(Binary)●可进行1字节,2字节,4字节的二进制处理●可使用的数值范围如下1字节-128~+1272字节-32768~+327674字节-2147483648~+2147483647采用2的补码表示●在顺序程序中指令数据的长度和初始地址●在诊断画面(PMCDGN)确认2字节,4字节的地址数据时,地址号大的为高位地址。
FANUCPMC功能指令详解(14):系统功能指令二
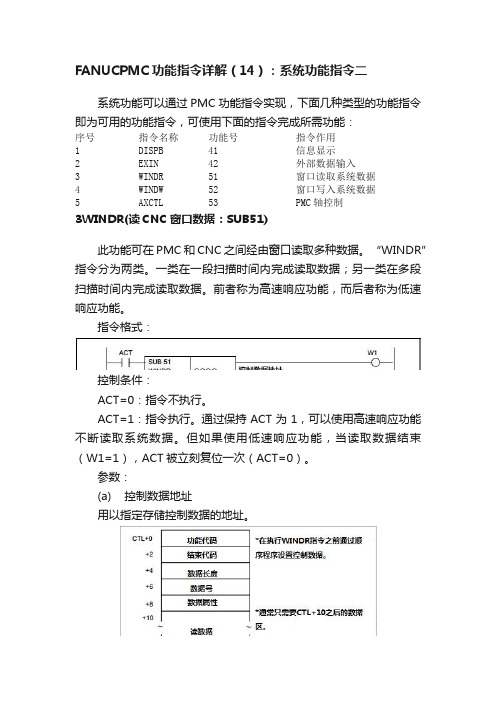
FANUCPMC功能指令详解(14):系统功能指令二系统功能可以通过PMC功能指令实现,下面几种类型的功能指令即为可用的功能指令,可使用下面的指令完成所需功能:序号指令名称功能号指令作用1 DISPB 41 信息显示2 EXIN 42 外部数据输入3 WINDR 51 窗口读取系统数据4 WINDW 52 窗口写入系统数据5 AXCTL 53 PMC轴控制3WINDR(读CNC窗口数据:SUB51)此功能可在PMC和CNC之间经由窗口读取多种数据。
“WINDR”指令分为两类。
一类在一段扫描时间内完成读取数据;另一类在多段扫描时间内完成读取数据。
前者称为高速响应功能,而后者称为低速响应功能。
指令格式:控制条件:ACT=0:指令不执行。
ACT=1:指令执行。
通过保持ACT为1,可以使用高速响应功能不断读取系统数据。
但如果使用低速响应功能,当读取数据结束(W1=1),ACT被立刻复位一次(ACT=0)。
参数:(a) 控制数据地址用以指定存储控制数据的地址。
读操作结束(W1):W1=0:W1复位。
W1=0表明WINDR未被执行或WINDR正被执行。
W1=1:通过读指令(ACT=1)读取数据结束时W1置为1。
如果使用低速响应功能,当读取数据结束时(W1=1),ACT被复位一次(ACT=0)。
运算结果寄存器:如果在WINDR指令执行期间发生错误,运算结果寄存器的第0位被置1。
同时,读操作结束信号W1被置1,错误的详细情况可输出至控制数据区的结束代码中。
4WINDW(写CNC窗口数据:SUB52)此功能经由窗口在PMC与CNC之间写多种数据项。
指令格式:控制条件:ACT=0:不执行WINDW指令。
ACT=1:执行WINDW指令。
在写数据完成后,ACT被复位一次(ACT=0)。
参数:(a) 控制数据地址用以指定存储控制数据的地址。
写操作结束(W1):W1=0:W1复位。
W1=0表明WINDW未被执行或正被执行。
FANUCPMC功能指令详解(02):计数器篇
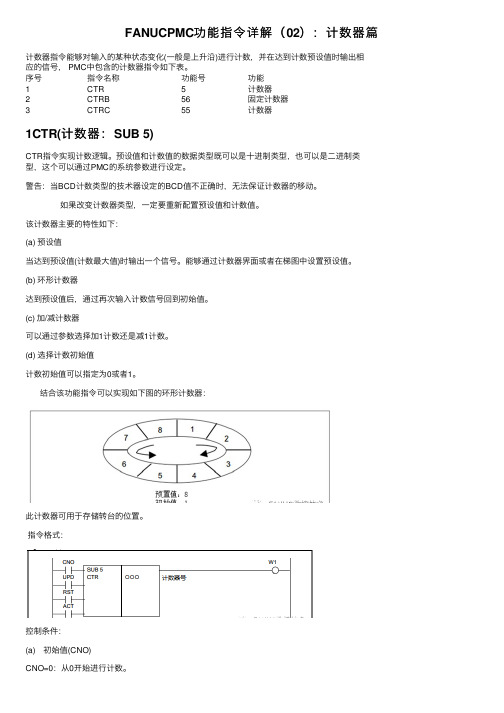
FANUCPMC功能指令详解(02):计数器篇计数器指令能够对输⼊的某种状态变化(⼀般是上升沿)进⾏计数,并在达到计数预设值时输出相应的信号, PMC中包含的计数器指令如下表。
序号指令名称功能号功能1CTR5计数器2CTRB56固定计数器3CTRC55计数器1CTR(计数器:SUB 5)CTR指令实现计数逻辑。
预设值和计数值的数据类型既可以是⼗进制类型,也可以是⼆进制类型,这个可以通过PMC的系统参数进⾏设定。
警告:当BCD计数类型的技术器设定的BCD值不正确时,⽆法保证计数器的移动。
如果改变计数器类型,⼀定要重新配置预设值和计数值。
该计数器主要的特性如下:(a) 预设值当达到预设值(计数最⼤值)时输出⼀个信号。
能够通过计数器界⾯或者在梯图中设置预设值。
(b) 环形计数器达到预设值后,通过再次输⼊计数信号回到初始值。
(c) 加/减计数器可以通过参数选择加1计数还是减1计数。
(d) 选择计数初始值计数初始值可以指定为0或者1。
结合该功能指令可以实现如下图的环形计数器:此计数器可⽤于存储转台的位置。
指令格式:控制条件:(a) 初始值(CNO)CNO=0:从0开始进⾏计数。
CNO=1:从1开始进⾏计数。
(b) 计数⽅向(UPDOWN)UPD=0:加计数器(计数从CNO指定的初始值开始)。
UPD=1:减计数器(计数从预设值开始)。
(c) 重置(RST)RST=0:⾮重置状态。
RST=1:重置状态,计数器重置到初始值;W1变为0;累计计数值复位为初始值。
注意:只有当需要复位时才将RST设为1。
(d) 启动条件(ACT)ACT输⼊上升沿触发计数器+1。
参数:(a) 计数器号计数器号在功能指令中设定,相应的预设值和编码形式则在计数器界⾯中设定,可以使⽤的计数器号如下:1⾄5路径PMC双安检PMCMemory-A Memory-B Memory-B Memory-B计数器号 1 ⾄201⾄1001⾄2001⾄3001⾄20预设值和累计值得范围如下:⼆进制计数器:0~32,767BCD计数器:0~9,999警告:如果计数器号有冲突或者超出范围,则操作不可预期。
功能指令说明 FANUC i PMC

张俊基笔记(功能指令说明)FANUC oi系统——PMC-功能指令编号缩写注释SUB1END1第一级顺序程序结束SUB2END2第二级顺序程序结束SUB3TMR可变定时器,其设定的时间在屏幕的定时器画面中显示和设定ACT=启动信号SUB4DEC译码,当从译码地址读取的BCD码与译码指令中的给定值对比,一致输出“1”,不同输出“0”。
主要用于M或T功能的译码SUB5CTR计数器,可作预置型,环型,加/减计数器,并可选择1或0作为初始值CN0=初始值选择UPDOWN=加/减计数选择RST=复位SUB6ROT旋转控制,用于回转控制,如刀架,旋转工作台等RN0=转台的起始号1或0BYT=位置数据的位数DIR=是否执行旋转方向短路径选择POS=选择操作条件INC=选择位置数或步数SUB7COD代码转换,将BCD代码转换为两位或四位BCD数字SUB8MOVE逻辑乘数数据传送,将逻辑乘数与输入数据进行进行逻辑乘,结果输出到指定地址。
也可从输入地址中,八位信号中,排除不要的位数SUB9COM公共线控制,控制直到公共结束指令(COME)范围内的线圈工作SUB10JMP跳转,用梯形图程序的转移。
当执行时,跳至跳转结束指令(JMPE)而不执行与JMP指令之间的梯形图SUB11PARI奇偶校验,对数据进行奇偶校验,检测到异常时输出报警O.E=0时,偶数校验;O.E=1时,奇数校验SUB14DCNV数据转换,将二进制码转换为BCD码或将BCD码转换为二进制码CNV=0时,二进制码转换为BCD码;NCV=1时,BCD码转换为二进制码SUB15COMP数值大小判别,将输入值与比较值进行比较来判别大小。
输入值小于等于比较值,则输出为1BYT=0时,处理数据为两位BCD;BYT=1时,四位BCDSUB16COIN一致性检测,检测输入值与比较值是否一致。
此指令只适用于BCD数据SUB17DSCH数据检索,在数据表(D)中搜索指定的数据,如未找到指定数据,则输出为1 SUB18XMOV变址数据传送,读取或改写数据表(D)中的内容RW=0时,读出;RW=1时,写入SUB19ADD加法运算,BCD码两位或四位数据相加;运算结果超过加数指定格式,输出置1SUB20SUB减法运算,BCD码两位或四位数据相减;运算结果为负,输出置1SUB21MUL乘法运算,BCD码两位或四位数据相乘;运算结果超过加数指定的格式,输出置1SUB22DIV除法运算,BCD码两位或四位数据相除除数为0,输出置1SUB23NUME定义常数,用于指定常数SUB24TMRB固定定时器,设定时间在编程时确定,不能通过定时器画面修改SUB25DECB二进制译码,可对1,2或4个字节的二进制代码数据译码。
PMC功能指令说明文档_v1.1
PMC标准化说明文档No.PMC_0001文件信息发布范围改版记录:文件审批记录:目录一、定时器 (5)1.TMR(延时接通定时器:SUB3) (6)2.TMRB(固定延时接通定时器:SUB24) (9)3.TMRBF(固定延时关断定时器:SUB77) (11)4.TMRC(延时接通定时器:SUB54) (13)5.TMRST(停表计时器(1msc精度):SUB221)TMRSS(停表计时器(1sec精度):SUB222) (16)二、计数器 (19)1.CTR(计数器:SUB5) (20)2.CTRB(固定计数器:SUB56) (23)3.CTRC(计数器:SUB55) (26)4.CTRD(计数器(4字节长度):SUB223) (29)三、数据传送 (32)1.MOVB(1字节数据传送:SUB43) (33)2.MOVW(2字节数据传送:SUB44) (34)3.MOVD(4字节数据传送:SUB47) (35)4.MOVN(任意字节数据传送:SUB45) (36)5.MOVE(逻辑乘数据传送:SUB8) (37)6.MOVOR(逻辑或数据传送:SUB28) (39)7.XMOVB(二进制变址数据传送:SUB35) (41)8.XMOV(变址数据传送:SUB18) (47)9.MOVBT(位传送:SUB224) (50)10.SETNB(数据设定(1字节长度):SUB225)SETNW(数据设定(2字节长度):SUB226)SETND(数据设定(4字节长度):SUB227) (54)11.XCHGB(数据交换(1字节长度):SUB228)XCHGW(数据交换(2字节长度):SUB229)XCHGD(数据交换(4字节长度):SBU230) (57)12.SWAPW(数据高低位交换(2字节长度):SUB231)SWAPD(数据高低位交换(4字节长度):SUB232) (59)13.DSCHB(二进制数据检索:SUB34) (62)14.DSCH(数据检索:SUB17) (65)四、表数据操作 (67)1.TBLRB(从表中读取1个字节:SUB233)TBLRW(从表中读取2个字节:SUB234)TBLRD(从表中读取4个字节:SUB235) (68)2.TBLRN(表中读取任意字节:SUB236) (71)3.TBLWB(1字节数据写入:SUB237)TBLWW(2字节数据写入:SUB238)TBLWD(4字节数据写入:SUB239) (74)4.TBLWN(表中写入任意字节数据:SUB240) (77)6.DMAXB(最大数据检索指令(1字节):SUB259)DMAXW(最大数据检索指令(2字节):SUB260)DMAXD(最大数据检索指令(4字节):SUB261) (84)7.DMINB(最小数据检索指令(1字节):SUB262)DMINW(最小数据检索指令(2字节):SUB263)DMIND(最小数据检索指令(4字节):SUB264) (88)五、比较指令 (91)1.EQB(1字节二进制比较(=):SUB200)EQW(2字节二进制比较(=):SUB201)EQD(4字节二进制比较(=):SUB202) (92)2.NEB(1字节二进制比较(≠):SUB203)NEW(2字节二进制比较(≠):SUB204)NED(4字节二进制比较(≠):SUB205) (94)3.GTB(1字节二进制比较(>):SUB206)GTW(2字节二进制比较(>):SUB207)GTD(4字节二进制比较(>):SUB208) (96)4.LTB(1字节二进制比较(<):SUB209)LTW(2字节二进制比较(<):SUB210)LTD(4字节二进制比较(<):SUB211) (98)5.GEB(1字节二进制比较(≥):SUB212)GEW(2字节二进制比较(≥):SUB213)GED(4字节二进制比较(≥):SUB214) (100)6.LEB(1字节二进制比较(≤):SUB215)LEW(2字节二进制比较(≤):SUB216)LED(4字节二进制比较(≤):SUB217) (102)7.RNGB(范围比较(1字节):SUB218)RNGW(范围比较(2字节):SUB219)RNGD(范围比较(4字节):SUB220) (104)PB(二进制数值大小判别:SUB32) (106)P(数值大小判别:SUB15) (108)10.COIN(一致性检测:SUB16) (110)六、位操作指令 (112)1.DIFU(上升沿检测:SUB57) (114)2.DIFD(下降沿检测:SUB58) (115)3.EOR(逻辑异或:SUB59) (116)4.AND(逻辑与:SUB60) (118)5.OR(逻辑或:SUB61) (120)6.NOT(逻辑非:SUB62) (122)7.PARI(奇偶校验:SUB11) (124)8.SFT(寄存器移位:SUB33) (126)9.EORB(1字节逻辑异或:SUB265)EORW(2字节逻辑异或:SUB266)EORD(4字节逻辑异或:SUB267) (129)10.ANDB(1字节逻辑与:SUB268)ANDW(2字节逻辑与:SUB269)ORW(2字节逻辑或:SUB272)ORD(4字节逻辑或:SUB273) (135)12.NOTB(1字节逻辑非:SUB274)NOTW(2字节逻辑非:SUB275)NOTD(4字节逻辑非:SUB276) (137)13.SHLB(1字节按位左移:SUB277)SHLW(2字节按位左移:SUB278)SHLD(4字节按位左移:SUB279) (139)14.SNLN(任意字节按位左移:SUB280) (142)15.SHRB(1字节按位右移:SUB281)SHRW(2字节按位右移:SUB282)SHRD(4字节按位右移:SUB283) (145)16.SNRN(任意字节按位右移:SUB284) (148)17.ROLB(1字节循环左移:SUB285)ROLW(2字节循环左移:SUB286)ROLD(4字节循环左移:SUB287) (151)18.ROLN(任意字节循环左移:SUB288) (154)19.RORB(1字节循环右移:SUB289)RORW(2字节循环右移:SUB290)RORD(4字节循环右移:SUB291) (157)20.RORN(任意字节循环右移:SUB291) (160)21.BSETB(1字节置位:SUB293)BSETW(2字节置位:SUB294)BSETD(4字节置位:SUB295) (163)22.BSETN(任意字节置位:SUB296) (166)23.BRSTB(1字节复位SUB297)BRSTW(2字节复位:SUB298)BRSTD(4字节复位:SUB299) (168)24.BRSTN(任意字节复位:SUB300) (171)25.BTSTB(1字节位校验:SUB301)BTSTW(2字节位校验:SUB302)BTSTD(4字节位检验:SUB303) (173)26.BTSTN(任意字节位校验:SUB304) (175)27.BPOSB(1字节位检索:SUB305)BPOSW(2字节位检索:SUB306)BPOSD(4字节位检索:SUB307) (177)28.BPOSN(任意字节位检索:SUB308) (180)29.BCNTB(1字节位计数:SUB309)BCNTW(2字节位计数:SUB310)BCNTD(4字节位计数:SUB311) (182)30.BCNTN(任意字节位计数:SUB312) (184)功能指令说明文档一、定时器PMC中包含的定时器功能指令如下:指令名称功能号功能1TMR3延时接通定时器2TMRB24固定延时接通定时器3TMRBF77固定延时关断时器4TMRC54延时接通定时器5TMRST221停表定时器(1ms精度)6TMRSS222停表定时器(1s精度)1.TMR(延时接通定时器:SUB3)该指令能够延时指定的时间后输出完成信号,其时间参数在定时器界面的非易失存储器(T地址)中设定,这使得其能够在不修改梯形图的条件下修改延时时间。
FANUC_PMC地操作---全参数
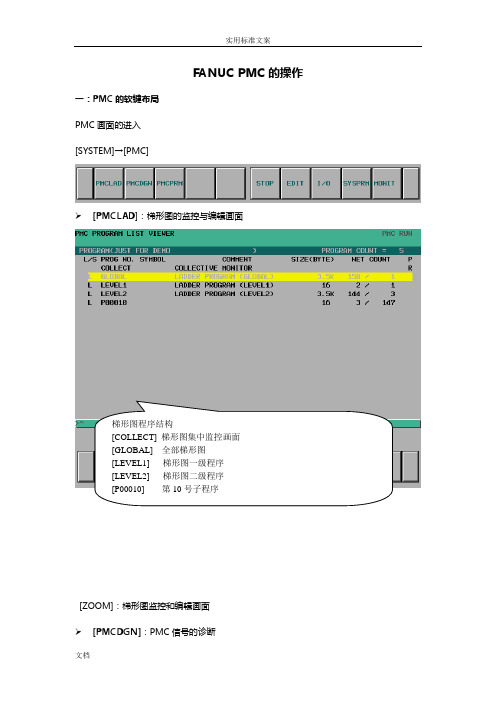
FANUC PMC 的操作一:PMC 的软键布局 PMC画面的进入 [SYSTEM]→[PMC]➢ [PMCLAD ]:梯形图的监控与编辑画面[ZOOM]:梯形图监控和编辑画面 ➢ [PMCDGN]:PMC 信号的诊断梯形图程序结构[COLLECT] 梯形图集中监控画面 [GLOBAL] 全部梯形图[LEVEL1] 梯形图一级程序 [LEVEL2] 梯形图二级程序 [P00010] 第10号子程序[TITLE]:标题画面[STATUS]:信号状态画面[ALARM]:PMC报警画面[TARCE]:PMC信号追踪画面[I/OCHK]:IO LINK诊断画面➢[PMCPRM]:PMC参数[TIMER]:定时器画面[COUNTR]:计数器画面[KEEPRL]:保持型k地址画面[DATA] :数据表画面[SETING]:参数设定画面➢[STOP]/[RUN]:PMC停止/启动(正常运行时请不要进行此项操作)➢[EDIT]:PMC编辑画面(进入编辑画面时需停止PMC)[TITLE]:标题的编辑[SYMBOL]:信号注释的编辑[MESAGE]:外部信息的编辑[MODULE]:IO模块的设定[CROSS]:交叉点的设定[CLEAR]:PMC的删除[CLRTTL]:删除标题[CLRLAD]:删除梯形图[CLRSYM]:删除系统参数[CLRMSG]:删除外部信息[CLRALL]:删除全部[CLRMDL]:删除IO模块设定[CONDNS]:压缩PMC区域[CLRPRM]:删除PMC参数➢[SYSPRM]:系统参数画面➢[MONIT]:在线监控画面计数器数据类型=二进制/BCD码可以通过RS-232C以及HIGH SPEED I/F(快速以太网口)和F-LADDER III软件进行在线监控和编辑,在线的同时在系统画面上对梯形图的监控变成无效。
二:对PMC画面进行相关的参数设定以上所显示的PMC的全部画面可能因为参数的设定原因而显示不全,在维修过程中可能需要我们对相关参数进行设定,以保证可以对PMC进行相关的维修操作。
FANUC系统PMC的功能指令

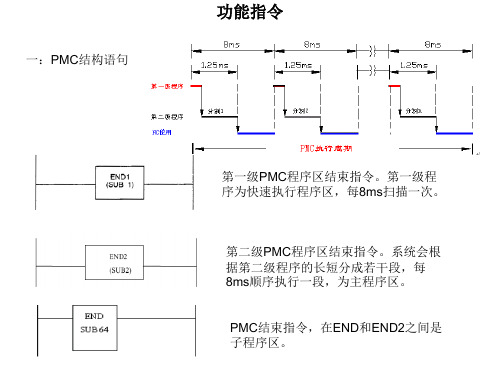
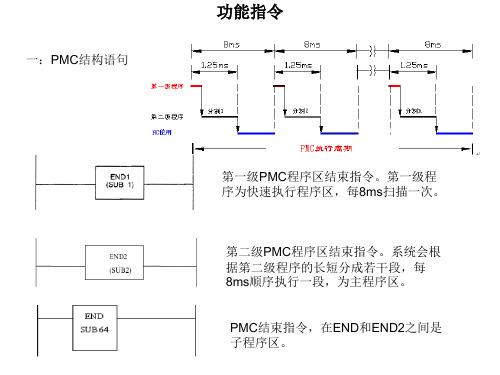
FANUC 系统PMC 的功能指令1.1.1 顺序程序结束指令FANUC-0i 系统的PMC 程序结束指令有第1级程序结束指令END1、第2级程序结束指令END2和程序结束指令END 三种,其指令格式如图1-1所示。
SUB64END SUB1END1SUB2END2图1-1 程序结束功能指令格式a )第 1 级程序结束b )第 2 级程序结束c )程序结束....a )b )c )1. 第1级程序结束指令END1第1级程序结束指令END1每隔8ms 读取的程序,主要处理系统急停、超程、进给暂停等紧急动作。
因为第1级程序过长将会延长PMC 整个扫描周期,所以第1级程序不宜过长。
如果不使用第1级程序时,必须在PMC 程序开头指定END1,否则PMC 无法正常运行。
2. 第2级程序结束指令END2第2级程序用来编写普通的顺序程序,如系统就绪、运行方式切换、手动进给、手轮进给、自动运行、辅助功能(M 、S 、T 功能)控制、调用子程序及信息显示控制等顺序程序。
通常第2级的步数较多,在一8ms 个内不能全部处理完(每个8ms 内都包括第1级程序),所以在每个8ms 中顺序执行第2级的一部分,直至执行第2级的终了(读取END2)。
在第2级程序中,因为有同步输入信号存储器,所以输入脉冲信号的信号宽度应大于PMC 的扫描周期,否则顺序程序会出现误动作。
3. 程序结束指令END将重复执行的处理和模式化的程序作为子程序登录,然后用CALL 或CALLU 命令由第2级程序调用。
包含子程序PMC 的梯形图的最后必须用END 指令结束。
图1-2为某一数控立式加工中心应用PMC 程序结束指令的具体例子。
..)(X1008.4R800.0*ESP.M F1.7MA X56.0CALL K9.1.X60.1 X1003.0系统急停....G8.4SUB64END SUB2END2图1-2 PMC 程序结束指令的应用.F0.6F45.0*ESP ALM.A .)(G71.1SA*ESPA *LOT垂直轴(Z 轴).)(Y1002.0*SPPB )(G8.5*SP)(R800.0*LOT. X1003.2. X1003.4. X1003.1. X1003.3.X1003.5*+XOT *+YOT *+ZOT *-XOT *-YOT *-ZOT SUB1END1MLK.M X1006.6)(G44.1MLKSUB65CALL ATCPCAP100R800.0)(A0.0……SUB71SP ATCPCAP100SUB72SPE …制动线圈.主轴急停.进给保持.机床超程.机床锁住.1000.机床超程报警.换刀子程序.(PMC 轴控制).....1.1.2 定时器指令1. 可变定时器(TMR )TMR 指令的定时时间可通过PMC 参数进行更改,指令格式和工作原理如图1-3所示。
FANUCPMC功能指令详解(07):位操作指令

FANUCPMC功能指令详解(07):位操作指令PMC位操作指令如下:序号指令名称功能号功能1DIFU57上升沿检测2DIFD58下降沿检测3EOR59逻辑异或4AND60逻辑与5OR61逻辑或6NOT62逻辑⾮7PARI11奇偶校验1DIFU(上升沿检测:SUB 57)该指令捕捉输⼊信号的上升沿后,输出信号在⼀个扫描周期内持续为1。
指令格式:控制条件:(a) 输⼊信号(ACT)当输⼊信号出现上升沿(0->1)时,输出线圈置1。
输出:(a) 输出信号(OUT)当捕捉到输⼊信号上升沿后,输出信号将在⼀个扫描周期内维持输出1。
参数:上升沿号1到5路径PMC双安检PMCMemory-A Memory-B Memory-B Memory-C上升沿数1⾄2561⾄10001⾄20001⾄30001⾄256指令⽰例:当R100.0由0变成1时,R110.0=1并维持⼀个扫描周期后⼜重新变为0。
2DIFD(下降沿检测:SUB 58)该指令检测到输⼊信号的下降沿后,输出信号在⼀个扫描周期内持续为1。
指令格式:控制条件:(a) 输⼊信号(ACT)当输⼊信号出现下降沿(1->0)时,输出线圈置1。
输出:(a) 输出信号(OUT)当捕捉到输⼊信号下降沿后,输出信号将在⼀个扫描周期内维持输出1。
参数:下降沿号1到5路径PMC双安检PMCMemory-A Memory-B Memory-B Memory-C下降沿数1⾄2561⾄10001⾄20001⾄30001⾄256指令⽰例:当R100.0由1变成0时,R110.0=1并维持⼀个扫描周期后⼜重新变为0。
3EOR(逻辑异或:SUB 59)EOR功能指令对地址A中的数据和常数(或地址B的数据)进⾏异或操作,并将结果输出到地址C 中。
当地址A和B地址中有如下数据:结果为:指令格式:控制条件:(a) 输⼊信号(ACT)ACT=0:指令不执⾏。
ACT=1:指令执⾏。
pmc功能指令
1:地址
比较结果输出 W1=0 W1=1 输入值>比较值 输入值≦比较值
一致性比较指令(仅适用于BCD码)
输入数据指定格式: 0:输入值为常数 1:输入值为地址
控制条件:
BYT 0:两位BCD 1:四位BCD
四:二进制代码的处理
二进制代码转换(数–数的关系)
应用:倍率开关的处理
手动倍率输入值:0.01%=11111111 11111110 切削倍率输入值: 1%=11111110
奇偶校验指令
在FANUC标准面板上的倍率开关上都有一位信号作为校验位而存在,我们可以取样这个信 号进行开关信号的掉线检测处理。同样的指令也可以应用在刀塔的编码器反馈刀位检测上。
OE:0 偶校验 1 奇校验 RST:复位错误信号输出 ACT:指令执行 W1 :1 错误输出
校验数据地址:校验指令只对一个字节的数据寄存器进行校验检查
旋转部件分度数地址:存储刀盘刀数的地址号 当前位置地址:存储当前刀座号的地址号 目标位置地址:存储DXCHB搜索出的目标刀座号 的 地址 计算结果输出地址:存储目标位置号或旋转步数的 地址 W1:0 正向旋转 1 负向旋转
RN0 0:转台位置号从0开始 1:转台位置号从1开始 DIR 0:旋转方向不选择,正向 1:判断旋转方向 POS 0:计算目标位置 1:计算目标前一个位置(需要提前减速控制时采用) INC 0:计算位置数
1:计算旋转步数
ACT 命令执行条件
例:
3.旋转到位后刀具交换完成后更新数据 表 指令:二进制变地址传送
RW 0:根据表内号从数据表中读出数据 1:根据表内号向数据表中写入数据
例:
更新当前位刀号
更新前
更新主轴位刀号
更新后
附录FANUCPMC功能指令DOC

FANUC PMC常用功能指令序号名称 SUB号意义1.1 1.1.1 E ND1 1 高级程序段结束1.1.2 END2 2 低级程序段结束1.2 1.2.1 TMR 3 定时器1.2.2 TMRB 24 定时器(固定时间)1.2.3 TMRC 54 定时器1.3 1.3.1 D EC 4 译码器1.3.2 DECB 25 二进制译码器1.4 1.4.1 CTR 5 计数器1.4.2 C TRC 55 计数器1.5 1.5.1 ROT 6 旋转控制1.5.2 R OTB 26 二进制旋转控制1.6 1.6.1 COD 7 代码转换1.6.2 C ODB 27 二进制代码转换1.7 1.7.1 M OVE 8 逻辑数据‘与’后数据传送1.7.2 M OVOR 28 逻辑数据‘或’后数据传送1.7.3 M OVB 43 一个字节数据传送1.7.4 M OVW 44 一个字节数据传送1.7.5 M OVN 45 块数据传送1.8 1.8.1 C OM 9 公共线控制1.8.2 C OME 29 公共线控制结束1.9 1.9.1 J MP 10 跳转1.9.2 J MPE 30 跳转结束1.9.3 J MPB 68 跳转1 标志1.9.4 J MPC 73 跳转2 标志1.9.5 L BL 69 标志1.10 1.10.1 PARI 11 奇偶校验1.11 1.11.1 DCNV 14 数据转换1.11.2 DCNVB 31 扩展数据转换1.12 1.12.1 COMP 15 比较1.12.2 COMPB 32 二进制比较1.12.3 COIN 16 一致性检查1.13 1.13.1 SFT 33 寄存器偏移1.14 1.14.1 DSCH 17 数据检索1.14.2 DSCHB 34 二进制数据检索1.15 1.15.1 XMOV 18 索引数据传送1.15.2 XMOVB 35 二进制索引数据传送1.16 1.16.1 ADD 19 加法1.16.2 ADDB 36 二进制加法1.17 1.17.1 SUB 20 减法1.17.2 SUBB 37 二进制减法1.18 1.18.1 MUL 21 乘法1.18.2 MULB 38 二进制乘法1.19 1.19.1 DIV 22 除法1.19.2 DIVB 39 二进制除法1.20 1.20.1 NUME 23 常数定义1.20.2 NUMEB 40 二进制常数定义1.21 1.21.1 DISP 49 信息显示(有条件的)1.21.2 DISPB 41 外部信息显示1.22 1.22.1 EXIN 42 外部数据输入1.23 1.23.1 AXCTL 53 PMC 轴控制1.24 1.24.1 WINDR 51 读窗口数据1.24.2 WINDW 52 写窗口数据1.25 1.25.1 DIFU 57 上升沿检测1.25.2 DIFD 58 下降沿检测1.26 1.26.1 EOR 59 逻辑‘异或’1.26.2 AND 60 逻辑‘与’1.26.3 OR 61 逻辑‘加’1.26.4 NOT 62 逻辑‘非’1.27 1.27.1 END 64 子程序结束1.28 1.28.1 CALL 65 条件调用子程序1.28.2 CALLU 66 无条件调用子程序1.28.3 SP 71 子程序开始1.28.4 SPE 72 子程序结束1.1 结束指令1.1.1 END1(SUB1)功能:第一级(高级)顺序程序段结束。
FANUCPMC常用功能指令
FANUCPMC常⽤功能指令在编制顺序程序(梯形图)时,有些功能,如控制时间、控制捷径换⼑时的旋转,很难⽤只执⾏位运算的基本指令来实现。
功能指令应运⽽⽣,它是为了⽅便⽤户编制复杂功能⽽使⽤的PMC程序指令。
功能指令都是⼀些⼦程序(subprogram),应⽤功能指令就是调⽤相应的⼦程序。
功能指令不能⽤纯继电器符号表⽰,基本格式由控制条件、指令、参数、输出组成。
▲功能指令基本格式FANUC PMC常⽤功能指令END1第1级顺序程序结束 [SUB1]该功能指令与PMC程序结构相关。
▲ PMC程序结构END2第2级顺序程序结束 [SUB2]该功能指令与END1⼀样,与PMC程序结构相关。
TMR定时器 [SUB3]TMR表⽰timer,定时器。
▲定时器⼯作原理【使⽤例2】闪烁信号CTR计数器 [SUB5]是进⾏加减计数的环形计数器(counter)。
▲计数器⼯作原理【使⽤例】DECB⼆进制译码 [SUB25]DECB表⽰binary decoding,⼆进制译码,B表⽰⼆进制。
【使⽤例】MOVE逻辑乘后数据传送 [SUB8]CODB⼆进制代码转换 [SUB27]CODB表⽰binary coding,⼆进制代码转换,B表⽰⼆进制。
【使⽤例】DCNV数据变换 [SUB14]DCNV表⽰data conversion,数据变换。
【使⽤例】ROT回转控制 [SUB6]ROT表⽰rotation,回转。
【使⽤例】COMP⼤⼩⽐较 [SUB15]COMP表⽰comparison,⽐较。
COIN⼀致性判断 [SUB16]COIN表⽰coincidence,⼀致性判断。
NUMEB⼆进制常数定义 [SUB40]NUMEB表⽰binary number,B表⽰⼆进制。
DISPB信息显⽰ [SUB41]DISPB表⽰binary display,B表⽰⼆进制。
要显⽰由梯形图触发的报警信息需做三件事:1. 编写功能指令DISPB(SUB41);2. 置位A信号,如A0.0=1时,将显⽰1000号报警;3. 编辑报警⽂本,如1000号报警的内容是急停,需要在FLADDER列表的message中输⼊“1000 EMERGENCY STOP”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
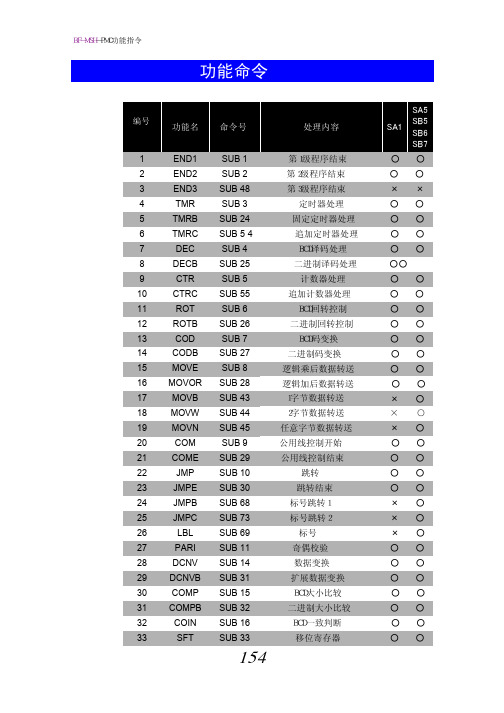
NO.
功能命令
名称 命令号
处 理 内 容
1 END1 2 END2 3 END3 4 TMR 5 TMRB 6 TMRC 7 DEC 8 DECB 9 CTR 10 CTRC 11 ROT 12 ROTB 13 COD 14 CODB 15 MOVE 16 MOVOR 17 MOVB 18 MOVW 19 MOVN 20 COM 21 COME 22 JMP 23 JMPE 24 JMPB 25 JMPC 26 LBL 27 PARI 28 DCNV 29 DCNVB 30 COMP 31 COMPB 32 COIN 33 SFT 34 DSCH 35 DSCHB
备 注
仅限 PMC -SC(RC) 系 注 注
注)在 PMC -SA(RA) ,SB(RB) ,SC(RC) 系列中,不能用 COM ,JMP
在 FS16 i/18 i/21 i 上不使用 PMC -SC(RC) 系。
PMC 有以下系列:
SA(RA) 系列 : PMC -SA1/SA2/SA3(RA1/RA2/RA3)3
个型号
SB(RB) 系列 : PMC -SB/SB2/SB3/SB4/SB5/SB6(RB/RB2/RB3/RB4/RB5/-SC/SC3/ SC4(RC/RC3/RC4)3
备 注
PMC -SA(RA) 系上没有 仅限 PMC -SC(RC) 系
SUB 18 变址修改数据转送 SUB 35 二进制变址修改数据转送 SUB 19 加法运算 SUB 36 二进制加法运算 SUB 20 减法运算 SUB 37 二进制减法运算 SUB 21 乘法运算 SUB 38 二进制乘法运算 SUB 22 除法运算 SUB 39 二进制除法运算 SUB 23 常数赋值 SUB 40 二进制常数赋值 SUB 49 信息显示 SUB 41 扩展信息显示 SUB 42 外部数据输入 SUB 51 读取窗口数据 SUB 52 写入窗口数据 SUB 9n 任意功能命令 (n=0-7) SUB 98 MMC 窗口读取 SUB 99 MMC 窗口写入 SUB 57 前沿检测 SUB 58 后沿检测 SUB 59 “异或” SUB 60 “与” SUB 61 “或” SUB 62 “非” SUB 64 程序结束 SUB 6 5 子程序有条件调用 SUB 66 子程序无条件调用 SUB 71 子程序开始 SUB 72 子程序结束
个型号
()内为旧名称,在功能上没有区别。
命令指定线圈数。 个型号
NO.
功能命令
名称 命令号
处 理 内 容
36 XMOV 37 XMOVB 38 ADD 39 ADDB 40 SUB 41 SUBB 42 MUL 43 MULB 44 DIV 45 DIVB 46 NUME 47 NUMEB 48 DISP 49 DISPB 50 EXIN 51 WINDR 52 WINDW 53 FNC 9n 54 MMCWR 55 MMCWW 56 DIFU 57 DIFD 58 EOR 59 ANM 60 OR 61 NOT 62 END 63 CALL 64 CALLU 65 SP 66 SPE
SUB 1 第 1 级程序结束 SUB 2 第 2 级程序结束 SUB 48 第 3 级程序结束 SUB 3 定时器 SUB 24 固定定时器 SUB 54 可变定时器 SUB 4 BCD 译码 SUB 25 二进制译码 SUB 5 计数器 SUB 55 计数器 B SUB 6 回转控制 SUB 26 二进制回转控制 SUB 7 代码转换 SUB 27 二进制代码转换 SUB 8 逻辑乘(“与”)后数据转送 SUB 28 逻辑和(“或”)后数据转送 SUB 43 1 字节数据转送 SUB 44 2 字节数据转送 SUB 45 任意字节数据转送 SUB 9 公用线控制开始 SUB 29 公用线控制结束 SUB 10 跳转开始 SUB 30 跳转结束 SUB 68 标号跳转 1 SUB 73 标号跳转 2 SUB 69 标号编号 SUB 11 奇偶校验 SUB 14 数据变换 SUB 31 扩展数据变换 SUB 15 大小比较 SUB 32 二进制大小比较 SUB 16 一致性判断 SUB 33 移位寄存器 SUB 17 数据检索 SUB 34 二进制数据检索