Orcaflex 基础介绍
Orcaflex基础介绍

Orcaflex不断推出新功能和服务,以满足不断变化的市场需求,并为企业 提供更高效、更智能的解决方案。
Orcaflex的应用领域
Байду номын сангаас
01 02 03 04
Orcaflex广泛应用于各种行业,如金融、医疗、零售、制造业等。
数据导入与导
数据格式
支持多种数据格式的导入与导 出,如CSV、Excel、JSON等
。
导入步骤
选择数据源、配置映射关系、 上传数据文件,完成数据导入 。
导出操作
根据需求选择导出字段、设置 导出格式,将数据导出到指定 位置。
数据校验
在导入和导出过程中,提供数 据校验功能,确保数据的准确
性和完整性。
报表定制与发布
报表模板定制
用户可以根据需求定制报表模板,包 括表格、图表、图形等多种展示形式 ,满足不同场景的报表需求。
报表动态生成
Orcaflex支持基于数据模型动态生成 报表,用户可以根据实际数据情况调 整报表展示效果。
数据存储与查询
数据存储管理
Orcaflex提供数据存储管理功能,支持多种存储方式,如关系型数据库、非关 系型数据库等,方便用户进行数据存储和备份。
05 Orcaflex的案例分析
案例一:某企业的销售数据分析
总结词
通过Orcaflex实现高效的销售数据分析
详细描述
某企业利用Orcaflex进行销售数据的收集、整合、分析和可视化,帮助管理层更好地了解销售情况,制定针对性 的营销策略,提高销售业绩。
案例二:某政府部门的报表统计
总结词
Orcaflex在报表统计中的优势
Flex技术基础培训

Flex Builder2 消息服务 数据管理服务 RPC服务 消息服务
Flex Data Services2 消息服务 数据管理服务 RPC服务
15
2014年11月21日星期五
Flex 基本架构
Flex Data Services
RPC服务 消息服务
Flex Charting
可扩展图形组件
Flash Builder4
通过设置组件属性改变其外观
图形资源 数据
2014年11月21日星期五
21
MXML基本语法
MXML是遵循W3C XML标准的标记语言。 MXML中融合了众多的标准。
1.XML标准 2.DOM Level 3事件模型标准
3.Web服务标准
5.HTTP标准 7.CSS标准
Flex 基本架构
Flex的基本架构包括4部分
1.Adobe SDK
2.Adobe Flex Charting 3.Adobe Flex Data Services 4.Adobe Flex Builder
Flex SDK2 MXML ActionScript3.0 Flex框架和类库 命令行编译与调试 Flex Charting2 可扩展图形组件
Flex技术基础培训
二零壹二年
Flex 简介
Flex通常是指Adobe Flex,是最初由Macromedia公司在2004年3 月发布的,基于其专有的Macromedia Flash平台,它是涵盖了支 持RIA(Rich Internet Applications)的开发和部署的一系列技 术组合。 2004年 Micromedia发布Flex1.0 2005年 Adobe兼并Micromedia 2006年Adobe发布Flex2.0 2008年Adobe发布Flex3.0 2010年Adobe发布Flex4.0 2011年Adobe发布Flex4.5
Flex技术基础培训
方腾飞 Main_shorttime@
什么是FLEX?
是Adobe公司推出的一系列框架和技术,使开发人员 可以开发和部署RIA程序(flash程序)。 是用于构建和维护在所有主要浏览器、桌面和操作系 统一致地部署的极具表现力的 Web 应用程序的高效 率的开放源码框架。
HELLO WORLD ACTIONSCRIPT
可以通过标签加入到Mxml文件里。 <mx:Script> <![CDATA[ import mx.controls.Alert; private function helloWorld():void { Alert.show("hello world!"); } ]]> </mx:Script> 可以引用外部的Script,只是将代码块抽出去。 <mx:Script source="">
}
特有语法
动态类的作用是在程序运行的时候,可以动态增加或 者修改类的属性。用关键字dynamic来标识。 Public dynamic class NotebookExample; Is用于判断变量类型是否一致,类似于Java的 instance of。 A is String; Dictionary类似于java中的map。 Public var users: Dictionary ; 访问器和设置器,get 和 set。 Public function set userId(userId:String); 其他的语法基本和java差不多,如int, String,Array,extends,static,void。
FLEX的原理
MXML Action Script SWF
ORACLE FORM培训资料分解
前言Oracle Forms是Oracle Developer中的一个主要产品,是一个在Windows环境下开发和运行的基于表格的开发工具。
Forms一般翻译成“表格”,但与纸上的表格有很大的区别,纸上的表格是事先画好的、静态的,只能用一次。
而Forms是动态的,不但可修改,而且可完成更多工作,如:查询、分类、统计和效验等。
Forms是一个允许用户添加、修改、删除和查询数据库记录的用户界面。
利用Forms可以快速开发基于表格的多种应用程序,用于表示和操纵数据库的数据。
Forms已经将Oracle数据库直接与应用程序开发软件捆绑在一起,使开发变的容易、快速。
Forms运行在Windows环境下,具有非常友好的图形界面,提供丰富的图形处理功能和对象编辑工具,为应用程序开发和维护提提供许多方便。
Forms还可以处理照片、图像等,为应用提供更复杂界面。
Forms完全使用屏幕图形窗口和工具,操作非常直接方便。
目录第一章 Form基本概念1.什么是Form2.Form模块的结构3.Form模块的层次结构4.Form模块文件组成第二章 Form的工作方式1.Form应用模块的生成2.运行Form模块3.Form工作模式4.查询数据5.插入、更新和删除数据6.提交和回滚事务第三章 Form设计工具1.Form界面设计2.对象导航器3.布局编辑器4.属性选项板5.其他Form设计工具第四章基本Form设计1.块和项2.开发Form的一般步骤3.建立基表块4.建立主从块5.建立控制块第五章常用界面项的设计1.建立文本项2.建立复选框3.建立列表项4.建立单选组5.建立显示项6.建立图像项7.建立按钮第六章其他常用功能设计1.建立值列表(LOV)和记录组2.建立编辑器3.建立报警器第七章窗口和画布视图1.窗口和画布视图的分类2.建立窗口3.建立内容画布视图4.建立堆叠画布视图5.建立工具条画布视图6.建立标签画布视图第八章 Form中的触发器1.Form中的触发器的基本概念2.Form中的触发器类型3.建立触发器4.触发器作用范围第九章触发器编程1.编写触发器2.内部子程序3.验证4.输入项触发器5.非输入项触发器6.使用变量和参数第十章定制菜单1.菜单编辑器2.建立菜单模块第一章Form 基本概念本章介绍有关Form的一些基本概念,包括以下内容:什么是Form。
Orcaflex 基础介绍

第十三页,共三十九页。
模型(móxíng)单元(
Link)
本身不具备质量(zhìliàng)和水动力属性,用于 连接任意的两个点,并传递拉力/压力,常用于模
拟钢丝绳
第十四页,共三十九页。
模型(móxíng)单元(Link)
Type
Tether Spring/Damper
第十五页,共三十九页。
Line type Chain
Rope/wire Line with floats
Homogeneous pipe Hose
Umbilical
第十页,共三十九页。
Line 定义(dìngyì)
Connection ( End A & End B)
End connection
End position End orientation End release
Orcina公司简介
Orcaflex软件(ruǎn jiàn)介绍 软件主界面 模型单元(line)
实例演示
模型单元 (link、wiliúchéng)介绍
实例演示
3
第三页,共三十九页。
企业背景
成立于1986年,公司位于英国Ulverston,主要提供海洋工程结构及水动力项目 咨询
同类型的软件:
1. Flexcom (MCS, Ireland) 2. Deeplines (Principia, France)
3. Riflex (DNV/Marintek, Norway)
Flexcom 是全球范围主要竞争者。 Deeplines 和 Riflex 主要在法国和挪威地区。 OrcaFlex 和 Flexcom约占海洋工程线动力(dònglì)分析市场80%的份额 OrcaFlex在全球的市场份额约是Flexcom的2.5倍
FLEX快速入门介绍

Flex快速入门介绍一、Flex简介:Flex是一个针对企业级富互联网应用的表示层解决方案,是一种应用程序框架。
Flex系列产品包括编译工具和IDE,通过编写MXML和ActionScript代码,用编译器来生成swf文件,使用浏览器的Flash Player插件就可以进行观看。
MXML代码与jsp 很像,主要是用于布局和显示,ActionScript代码和javascript很像,语法也有很多相似之处。
总的来说,使用java的程序员很容易入手学习flex。
二、Flex与ActionScript基础:一个Flex应用程序有ActionScript和MXML两种语言代码组成。
从3.0开始ActionScript已经从基于原型脚本语言进化到完全面向对象的。
MXML则是一种标记语言,非常类似于大家所熟悉的超文本标记语言(HTML),扩展标记语言(XML)。
如何把MXML和ActionScript相互关联起来呢?对于编译器来说,解析这两种语法后最终被翻译成同一个对象,比如:<mx:Button id="btn"label="My Button"height="100"/>和Var btn:Button=new Button();bel="MyButton";btn.height=100;产生的是同一个对象,两者的主要不同是,ActionScript创建的对象(上面第二个例子)除了Button就没有别的了,而MXML中创建的对象将Button添加到包含MXML代码的任何组件上。
Flex框架根据MXML中的对象描述来调用构造函数,然后将其添加到父对象上或设置其为父对象的某个属性。
MXML文件中可用<mx:Script>标签包含ActionScript,不过ActionScript文件是不能包含在MXML里的。
Flex从入门到精通 第7章

7.1.3 Flex的分类
Flex容器按其使用方式又可分为两类:布局 (Layout)和导航(Navigator)。 1.布局容器(Layout Container) 这类容器用于对子类组件定位和限定尺寸。 2.导航容器(Navigator Container) 这类容器用于控制用户的对多个子类容器的导航、 转移。
7.4.3 折叠导航容器(Accordion navigator Container)
在MXML中,使用<mx: Accordion > 标签定义折叠导航容器。折叠导航容 器建立一系列的面板,依次叠加起来。每个面板的头就是它的导航按钮。 点击任何一个按钮就会打开相应的面板。折叠导航容器有一个非常好的应 用实例。在HTML网页中,购物往往需要几个页面来完成。用户填写完一个 页面,提交之后,再填写下一个页面,直到完成。折叠导航容器,可以将 几个页面分置在其几个单独面板中,填写完成后,统一提交。也可以在不 同的面板分置不同种类的商品目录。 在折叠容器中,每个层面只能容纳一个子类,其语法句式如下: <mx:Accordion 属性 样式 事件 > 子类标签 </mx:Accordion >
7.4 导航容器(Navigator Container)
导航容器是用来控制一组子类容器的移动,导航。 导航容器只定义子类容器的顺序,不定义子类容 器的布局和定位。导航容器中的子类,必须是容 器,而不是控件组件。 Flex提供了以下的导航容器: 视窗堆栈导航容器 标题头导航容器 折叠导航容器
7.3.2 盒子,水平盒子,垂直盒子布局容器(Box, HBox, VBox Layout Container)
盒子容器的是在水平或垂直方向上按序排列子类 组件。其语法句式如下: <mx:Box 属性 样式 > 子类标签 </mx:Box>
Flex 3 基础教程(1)
Flex 3 基础教程(1) 基础教程(1
——简介,安装和开发环境 ——简介,安装和开发环境
郑岩峰 20082008-5-18
Adobe Flex 3 简介 什么是Adobe Flex? 什么是Adobe Flex? Flex Builder 3 教程 使用Flex 使用Flex Builder 设计视图 Hello World应用程序 World应用程序 程序结构解析
如何创建Flex 如何创建Flex应用程序 Flex应用程序 步骤如下: 选取预定义的可视化组件 在用户界面上添加组件 使用styles和skins自定义应用程序界面 使用styles和skins自定义应用程序界面 增加事件处理和脚本处理代码,控制应用 程序行为 连接数据和通讯服务 Build和Run应用程序 Build和Run应用程序
什么是Flex 什么是Flex 3
Flex 3是Adobe出品的开发RIA(Rich Internet 3是Adobe出品的开发RIA(Rich Applications)的工具,包括: Applications)的工具,包括: Flex 3 SDK(软件开发包) SDK(软件开发包) -Compiler (编译器) (编译器) -Framework (Flex类库) (Flex类库) -Debugging tools (调试工具) (调试工具) Flex Builder 3 -整合和开发环境 -基于eclipse 基于eclipse 和Flex整合的服务器产品 Flex整合的服务器产品 -LiveCycle Data Services 2.51 -ColdFusion 8
flex教程

flex教程Flex是一种弹性布局的框架,可以帮助开发者更轻松地实现自适应的网页布局。
本篇教程将介绍Flex的基本概念和使用方法。
Flex是CSS3中的一个新属性,它的全称是Flexible Box Layout Module,意为弹性盒子布局模块。
通过使用Flex属性,可以轻松地实现网页布局的弹性伸缩效果,适应不同尺寸的屏幕。
在使用Flex之前,我们需要先了解一些基本概念。
Flex容器是指应用了Flex属性的元素,它的下一级子元素就是Flex项目。
容器内的所有项目都会按照一定的规则进行布局。
Flex项目有两种基本属性,分别是flex-grow和flex-shrink。
flex-grow 定义了项目在剩余空间中所占的比例,flex-shrink定义了项目在空间不足时的收缩比例。
接下来我们看一个例子来演示Flex的使用方法:```html<!DOCTYPE html><html><head><style>.container {display: flex; /* 将元素设置为Flex容器 */}.item {flex: 1; /* 让所有项目平均分配剩余空间 */}</style></head><body><div class="container"><div class="item">项目1</div><div class="item">项目2</div><div class="item">项目3</div><div class="item">项目4</div></div></body></html>```在上述代码中,我们将一个div元素设置为Flex容器,然后在容器内创建了4个Flex项目。
Get清风OrcaFlex软件操作指南

OrcaFlex软件操作指南1总体运动疲劳分析1.1有限元模型总体运动疲劳分析有限元模型与总体强度分析模型根本一致,主要区别在于疲劳分析时间不同、疲劳分析选用的波浪类型不同,还需要考虑管线的腐蚀余量等。
一般运动疲劳分析的时间至少需要1200s,波浪分析类型为不规那么波。
其中波浪参数的设定,需要根据选定的波能谱经过查询确定。
本指南以 1.25m 波高时波浪为例,通过下面的表格和图展示了疲劳分析时具体参数设置。
序号波高〔m〕周期〔s〕E N NE S SE SW 概率概率概率概率概率概率1 1.25 9 4.765 2.774 12.603 4.821 7.41 02 1.75 10 4.78 4.325 13.03 5.605 6.086 2.293 2.25 11.5 2.802 2.745 5.606 3.898 5.278 1.484 2.75 12.4 0.968 0.313 1.48 1.607 2.817 0.4555 3.25 11.5 0 0 0 0.356 0.597 0.7116 3.75 9.5 0 0 0 0 0 0.0717 4.25 11.5 0 0 0 0 0 0.1858 4.75 12 0 0 0 0 0 0.142总概率100 13.315 10.157 32.719 16.287 22.188 5.334 波浪准备时间20s 波浪谱Jonswap 模拟时间1200s 波高 1.25 浪向0deg 周期9s系数〔r〕 1.31.2运动疲劳分析按照上面的参数设置分别进行各种工况下的总体运动疲劳分析之后,点击主界面菜单栏中的Results按钮,选择Fatigue Analysis,将会出现下面运动疲劳分析截面。
1.2.1Damage Calculate损伤计算种类,分别针对各向同性钢管、柔性管或者脐带缆等。
对于本工程中的SCR应选择Homogeneous Pipe stress。
OrcaFlex软件操作指引说课材料
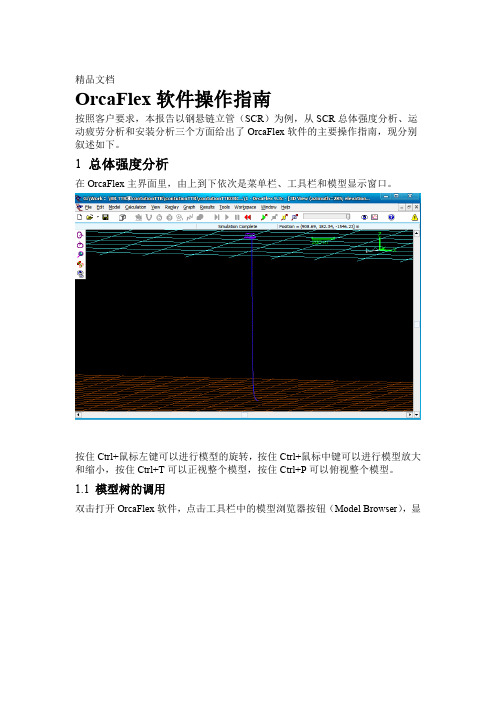
精品文档OrcaFlex软件操作指南按照客户要求,本报告以钢悬链立管(SCR)为例,从SCR总体强度分析、运动疲劳分析和安装分析三个方面给出了OrcaFlex软件的主要操作指南,现分别叙述如下。
1总体强度分析在OrcaFlex主界面里,由上到下依次是菜单栏、工具栏和模型显示窗口。
按住Ctrl+鼠标左键可以进行模型的旋转,按住Ctrl+鼠标中键可以进行模型放大和缩小,按住Ctrl+T可以正视整个模型,按住Ctrl+P可以俯视整个模型。
1.1模型树的调用双击打开OrcaFlex软件,点击工具栏中的模型浏览器按钮(Model Browser),显示模型树。
精品文档.精品文档环境参数设置1.2按钮打开环境参数设置界面。
双击EnvironmentSea1.2.1雷诺数计算方海水温度,由上到下可依次设置海平面位置,运动粘性系数其中海平面位置数值是相对于总体坐标系而言;温度为摄氏温度,它的大小直接影响到运动粘性系数。
而雷诺数的计算方法,主要取决于流速和结构特征长度的计算。
软件中三种方法雷诺数最终的计算公式分别为Re = |Vr|D/ν,Re crossnom= |Vr|Dcos(α)/ν,Re = |Vr|D/νcos(α),其中Vr径向速度。
OrcaFlex calculates flow Reynolds number in order to calculate drag and lift coefficients1.2.2Sea Density设置海水密度,可以是变化的,也可以是恒定不变的。
如该海域的海水密度为1025Kg/m3,具体如下图所示。
精品文档.精品文档1.2.3Sea Bed设置海底形状,海水的深度、斜度以及海底土壤的刚度系数,其中海底斜度和海底方向都是相对于总体坐标系而言,具体参数应在立管总体设计参数中给出。
具1.2.4Waves设置波浪的参数,主要包括波浪方向、波高、周期、起始时间,波浪类型等,其中波浪方向是相对于总体坐标系而言,波浪类型的选取取决于分析类型和实际海况,波高和周期根据海况资料给出,具体参数设置如下面表格和图所示。
Orcaflex基础介绍 ppt课件

主要特点及优势
软件易用性:
海洋工程细长结构物动力计算分析+环境载荷
多任务、批处理、分析能力高效
便利、直观、高质量的图形用户界面,可以简单、快速的建立模型 使用功能:
✓ 系统图像显示可选线框或者三维实体显示 ✓ 可选择隐式或显式的积分迭代法 ✓ 浮体与线杆结构的耦合分析 ✓ 分析模型可包括风、浪、流等环境参数 ✓ 可建立各种海底条件,包括平整海底面,二维海底及三维海底 ✓ 可用第三方软件如:Excel, Text file, Python, Matlab进行批处理操作 ✓ 可进行干涉分析、疲劳分析(包括VIV分析)、模态分析
P12
Line 定义
Structure Attachment
P13
模型单元(Link)
本身不具备质量和水动力属性,用于连接 任意的两个点,并传递拉力/压力,常用于 模拟钢丝绳
模型单元(Link)
Type
Tether Spring/Damper
模型单元(Link)
Connection Release Drawing Stiffness
P3
企业背景
成立于1986年,公司位于英国Ulverston,主要提供海洋工程结构及水 动力项目咨询
目前致力于软件开发工作
数学专业人员,软件开发人员, 机械、力学专业人员及海洋工程技术 人员
OrcaFlex是一款世界领先的动力学分析计算的海洋工程软件包,主要应用于: 海洋工程学 地震防御 海洋工学 海洋学研究 水产业
Sep-02
OrcaFlex 8.0
Maylease 9.8a
9.7d 9.6c 9.5d 9.4g 9.3c 9.2f 9.1e 9.0g 8.7d 8.6d 8.5d 8.4e 8.3d 8.2c 8.1b 8.0e
OrcaFlex软件操作的指南

OrcaFlex软件操作指南按照客户要求,本报告以钢悬链立管(SCR)为例,从SCR总体强度分析、运动疲劳分析和安装分析三个方面给出了OrcaFlex软件的主要操作指南,现分别叙述如下。
1总体强度分析在OrcaFlex主界面里,由上到下依次是菜单栏、工具栏和模型显示窗口。
按住Ctrl+鼠标左键可以进行模型的旋转,按住Ctrl+鼠标中键可以进行模型放大和缩小,按住Ctrl+T可以正视整个模型,按住Ctrl+P可以俯视整个模型。
1.1模型树的调用双击打开OrcaFlex软件,点击工具栏中的模型浏览器按钮(Model Browser),显示模型树。
1.2环境参数设置双击Environment按钮打开环境参数设置界面。
1.2.1Sea由上到下可依次设置海平面位置,运动粘性系数,海水温度,雷诺数计算运动粘性系数海水温度(o T)雷诺数计算方法水平面位置(m)(m2/s)0 1.2E-6 15 沿横流方向计算其中海平面位置数值是相对于总体坐标系而言;温度为摄氏温度,它的大小直接影响到运动粘性系数。
而雷诺数的计算方法,主要取决于流速和结构特征长度的计算。
软件中三种方法雷诺数最终的计算公式分别为Re nom= |Vr|D/ν,Re cross= |Vr|Dcos(α)/ν,Re flow= |Vr|D/νcos(α),其中Vr径向速度。
OrcaFlex calculates Reynolds number in order to calculate drag and lift coefficients1.2.2Sea Density设置海水密度,可以是变化的,也可以是恒定不变的。
如该海域的海水密度为1025Kg/m3,具体如下图所示。
1.2.3Sea Bed设置海底形状,海水的深度、斜度以及海底土壤的刚度系数,其中海底斜度和海底方向都是相对于总体坐标系而言,具体参数应在立管总体设计参数中给出。
具体如下面表格和图表所示。
flex技术介绍

MXMLC 编译器
•MXML to AS 3 •CSS to AS 3 •AS 3 to ByteCode •Assets to SWF •ByteCode to SWF •SWF 运行于 Flash Player 9
Flex可视化组件
• • • • • • • • • • Flex可视化组件指的是Flex内置的图形组件,用于在Flex应用的开发过程中,灵活的 构建用户可视化图形界面。主要包括以下3种。 控件(Controls):按钮、组合框等。 容器(Containers):存放控件的地方。当然,它也可以存放容器。 图表(Charting):利用X、Y轴组成的二维图形表达数据。 对于上述组件来来说,他们有如下几个共同的特征: 尺寸(Size):每一种控件都有自己默认的尺寸。在使用这些控件的时候,可以使用默 认尺寸,也可以根据需求改变,还可以在应用运行时,动态改变。 事件(Event):用户界面的元素,需要对用户的操作做出反应,这就是事件,例如: 单击按钮,在运行时动态创建组件等,事件是组件非常重要的组成部分。 样式(Style):样式是用来显示组件的元件。在Flex中可以利用样式表(CSS, Cascading Style Sheets),设定组件的样式。 行为(Behaviors):由用户或者应用触发,改变组件的状态。例如,用户使用鼠标拖 放组件。 皮肤(Skin):组件的外观。
RIA技术概述
•RIA是Rich Internet Applications的缩写, 翻译为丰富互联网应用程序。RIA的目标是将 桌面程序的表现力与浏览器的程序的方便、快 捷结合在一起。开发者可以在浏览器程序上部 署C/S客户端的程序,得到比传统HTML更强大 的表现力。
RIA的特点
•RIA最突出的特点为“Rich”,同时RIA最核心的部分也体现 在“Rich”中。“Rich”包含了两层含义: •1.丰富的数据模型 •RIA技术提供了多种数据模型来处理客户端复杂的数据操作。 使用RIA可以将部分原本需要在后台程序处理的问题转移到客 户端,使数据能够被缓存在客户端,从而可以实现一个比基 于HTML的响应速度更快,且数据往返于服务器的次数更少的 用户界面。 •2.丰富的界面元素 •RIA技术提供了比HTML更为丰富的界面表现元素,密集、响 应速度快和图形丰富的页面元素与数据模型结合在一起,为 用户提供好的使用体验。
ORACLE ERP开发之OracleForms基础
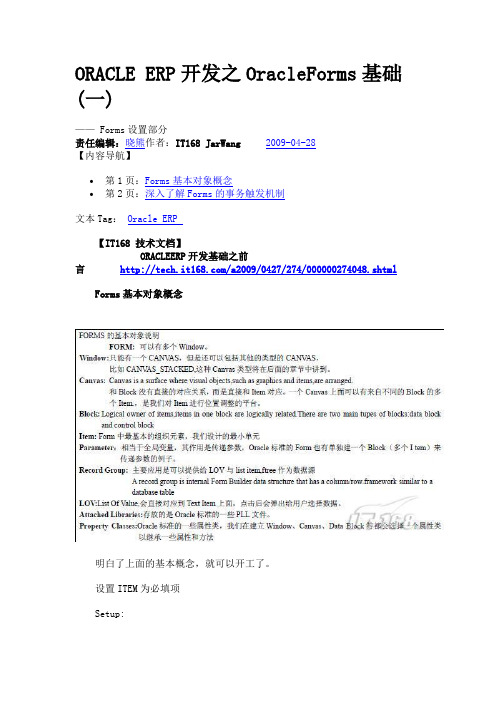
ORACLE ERP开发之OracleForms基础(一)—— Forms设置部分责任编辑:晓熊作者:IT168 JarWang2009-04-28【内容导航】∙第1页:Forms基本对象概念∙第2页:深入了解Forms的事务触发机制文本Tag:Oracle ERP【IT168 技术文档】ORACLEERP开发基础之前言/a2009/0427/274/000000274048.shtml Forms基本对象概念明白了上面的基本概念,就可以开工了。
设置ITEM为必填项Setup:Effect:此效果与是set_item_property('test.l_test',required,property_true)一样的。
设置ITEM的初始值为当前日期实现按“ENTER”自动跳至下一条记录设置BLOCK属性:导航器风格:改变记录。
使用堆叠画布Effect:1. 先将数据块、画布布局好(用向导的方式就可以了,具体操作就不用讲了吧)。
2. 在画布中创建一个堆叠画布。
3. 将项的画出属性更为堆叠画布(这一步最关键了)。
4.调整后得到下面这效果了。
深入了解Forms的事务触发机制编写一个健壮的FORMS应用程序,免不了要做各种数据的检验动作。
所以必须了解FORMS事务触发器的工作原理。
其他类型的触发器相对来说比较好理解,就不详说了。
① FORMS处理事务分成发送(POST)和提交(COMMIT)两个阶段。
这个跟JAVA 中的事务操作类似,也就是Statement和Commit两个阶段。
但FORMS一些规则比较死,也就是说规定好POST之前会触发PRE触发器之类等等。
②事务触发器分成三类,PRE-XXX、ON-XXX、POST-XXX,它们的执行顺序可以直接从其英文缩写得出。
例:执行INSERT操作,会按以下顺序进行。
1.1从数据项复制数据。
1.2触发PER-INSERT触发器。
1.3检查记录的惟一性。
Flex 简单培训
Flex 培训大纲1、简介2、AS3语言基础与JSON格式3、简单组件的编写(常用组件)4、复合组件的编写与打包swc5、Css的设置与动画6、前后台传输7、sprite图形绘图8、一些小经验/开发规范一、简介Flex 通常是指Adobe Flex,是最初由Macromedia公司在2004年3月发布的,基于其专有的Macromedia Flash平台,它涵盖了支持RIA的开发和部署的一系列技术组合。
现在flex使用的脚本是ActionScript3.0,并且建立起类似于java swing的类库和相应的UI 组件。
Flex是通过java或者.net等非Flash方法,解释.mxml文件生成相应的.swf文件。
Flex 的组件和flash的组件很相似,但是有所改进增强。
目前Macromedia公司已经被ADOBE(奥多比)收购。
当前的最新版本为flex4,常用版本为flex3,flex4目前中文资料很少,了解的还不深入,所以目前还用flex3。
运用flash是完全可以做到flex效果的,相应的,flex也可完成flash的功能特效,它们在底层是相通的,只是开发工具与开发标准的不同,都被解释为As来运行(个人观点),所以我认为flex在效果上达的的目标是实现flash的各种功能的同时还可快速的组件式开发。
它能更好的为用户一种不同与html+js的交互方式,得到较好的用户体验。
AIR 是flex基础上的桌面应用,它可以开发出脱离浏览器之外的桌面应用,与本地数据库交互,操作本地文件,调用exe文件,从而调用dll(动态链接库)文件等操作。
LCDS:Flex和Java通信,一般来说使用LCDS(LiveCycle Data Service),不过这个是收费的,所以就用免费的BlazeDS代替。
BlazeDS是官方从LCDS中分离出来的开源数据服务中间件。
为什么来说一般来说是用LCDS,也就是说不一定非要用LCDS,因为LCDS提供的功能完全可以自己实现,而且除了RemoteObject方式,还有WebService、HTTPService等等。
FAST v8 OrcaFlexInterface 用户指南说明书

User’s Guide to using OrcaFlexInterface in FAST v8 IntroductionThis document briefly describes how to use OrcaFlex coupled to FAST v8 for modeling floating offshore wind turbines. OrcaFlex is a commercial software package developed by Orcina for the design and analysis of marine systems. When the OrcaFlexInterface module is used in FAST, all hydrodynamic and mooring loads will be computed using OrcaFlex, while the turbine, tower, and floating platform structural dynamics; aerodynamics; and control and electrical-drive dynamics will be computed by FAST. To use this module with FAST, a valid OrcaFlex license is needed and a special DLL compiled by Orcina is required (FASTlinkDLL.dll). This DLL is called by FAST during the FAST simulation to compute the loads on the platform by OrcaFlex. A 32- and 64-bit version of FASTlinkDLL.dll compatible with the 32- and 64-bit Windows executable version of FAST is available at /Support/FASTlink.zip. One should choose the version that matches the addressing scheme of the version of OrcaFlex that is installed, otherwise the simulation will not run. A 32- and 64-bit Windows executable version of FAST v8 is available at https:///FAST8.At this time, FAST’s ElastoDyn structural-dynamics module assumes for a floating platform that the substructure (floating platform) is a six degree-of-freedom (DOF) rigid body. At each time step (the FAST glue code and OrcaFlex must both use the same time step), OrcaFlex receives the six-DOF position, orientation, and velocities of the platform, computes the hydrodynamic and mooring loads, and returns them back to FAST in the form of a six-by-six added-mass matrix and six-by-one load vector (three forces and three moments). FAST will take these OrcaFlex outputs, along with the six-DOF platform acceleration, and compute the total six-component hydrodynamic and mooring loads to be applied to the platform in ElastoDyn, including hydrodynamic added-mass effects.This document was written when the interface between OrcaFlex 9.8d and FAST v8.12 was first developed, but may apply to newer releases. It may also work with earlier versions of OrcaFlex, starting with 9.7b, though compatibility has not been tested.Modifying the FAST Input FileWhen the OrcaFlexInterface module is used in FAST, all hydrodynamic and mooring loads will be computed using OrcaFlex. This replaces the HydroDyn module and alternative mooring modules. In the FAST input file, this is done by setting the following options in the FAST primary input file: •CompHydro = 0•CompMooring = 4•MooringFile = “<OrcaIptFileName>”where <OrcaIptFileName> is the name of the input file for the OrcaFlexInterface module. The format of this file is as given in Appendix A. This file specifies the name of the OrcaFlex input file without the .dat file extension (OrcaIptFileName) and the name of the Windows DLL supplied by Orcina with the .dll file extension (DLL_FileName).As OrcaFlex and the FAST glue code must both use the same time step, an appropriate time step suitable to both software should be selected. Additionally, the six platform DOFs in FAST’s ElastoDyn module should also be enabled to properly transfer loads and motions between FAST and OrcaFlex. Also, the same platform initial conditions should be set in both ElastoDyn and OrcaFlex.No other changes are required or limitations imposed on FAST.FAST Output VariablesWhen FAST is executed with the OrcaFlexInterface module enabled, an additional 18 output channels are automatically added to the FAST output file (see Table 1). Additional results calculated internally within OrcaFlex are written to the OrcaFlex simulation file, <OrcaIptFileName>.sim, accessible through OrcaFlex.Table 1: Output Parameters from OrcaFlexInterfaceName Description Convention UnitsDirected along x i-axis (kN) OrcaFxi Total platform horizontal surge force (includingadded mass)Directed along y i-axis (kN) OrcaFyi Total platform horizontal sway force (includingadded mass)Directed along z i-axis (kN) OrcaFzi Total platform vertical heave force (including addedmass)About the x i-axis (kN·m) OrcaMxi Total platform roll tilt moment (including addedmass)About the y i-axis (kN·m) OrcaMyi Total platform pitch tilt moment (including addedmass)OrcaMzi Total platform yaw moment (including added mass) About the z i-axis (kN·m)Directed along x i-axis (kN) OrcaHMFxi Platform horizontal surge force calculated byOrcaFlex (hydrodynamic + mooring)Directed along y i-axis (kN) OrcaHMFyi Platform horizontal sway force calculated byOrcaFlex (hydrodynamic + mooring)Directed along z i-axis (kN) OrcaHMFzi Platform vertical heave force calculated by OrcaFlex(hydrodynamic + mooring)About the x i-axis (kN·m) OrcaHMMxi Platform horizontal roll tilt moment calculated byOrcaFlex (hydrodynamic + mooring)About the y i-axis (kN·m) OrcaHMMyi Platform horizontal pitch tilt moment calculated byOrcaFlex (hydrodynamic + mooring)About the z i-axis (kN·m) OrcaHMMzi Platform horizontal yaw moment calculated byOrcaFlex (hydrodynamic + mooring)Directed along x i-axis (kN) OrcaAMFxi Platform horizontal surge force due to added masseffectsDirected along y i-axis (kN) OrcaAMFyi Platform horizontal sway force due to added masseffectsDirected along z i-axis (kN) OrcaAMFzi Platform vertical heave force due to added masseffectsOrcaAMMxi Platform horizontal pitch roll moment due to added About the x i-axis (kN·m)mass effectsAbout the y i-axis (kN·m) OrcaAMMyi Platform horizontal pitch tilt moment due to addedmass effectsAbout the z i-axis (kN·m) OrcaAMMzi Platform horizontal yaw moment due to added masseffectsConstructing the OrcaFlex ModelThe steps required to develop an OrcaFlex model compatible with FAST are as follows:1.In OrcaFlex, open a New Model (Ctrl+N).2.In the model browser, double click on Variable Data. In the Externally Calculated Data panel,select External Functions. Add one Number of data sources, and rename ExternalFunction1 to ExtFn. Browse for the FASTlinkDLL.dll file. For the Function Name, select ExtFn.3.In the model browser, go to General -> Integration and Time Step -> Integration Method, andmake sure this value is set to Implicit.4.Insert a new vessel. In the model browser, go to Vessel1:a.Rename Vessel1 to Platform.b.Set Initial Position and Orientation both to (0,0,0). Note: If there is to be an initialplatform offset, the initial platform displacement must be set in the FAST ElastoDyninput file as well.c.Under Calculation:i.Set Primary Motion to Externally Calculated.ii.Set Superimposed Motion to None.iii.Under Included Effects, check Applied Loads, Wave Load (1st order) and Added Mass and Damping. Other effects may be included if the WAMIT input filecontains the necessary information. Note that the 2nd-order wave-drift loadsare not included in the WAMIT input files we provide, and the Applied Loadsvalue will be defined in a later section.d.Under the Primary Motion tab:i.Set Externally calculated primary motion to ExtFn.5.Change the properties of the vessel by opening Vessel Type1 from the model browser.a.In the bottom of the screen, press Import. Locate your WAMIT *.out file, and pressopen.b.Under Structure, set Mass and Moment of Inertia Tensor to a small non-zero values(because these properties are accounted for in FAST).c.Optional: At this stage, we suggest changing the vessel geometry to reflect anappearance representative of the system being modeled. This will not influence thesimulation, but it will help with visualizing the vessel motions and mooring/vesselconnections after the simulation is completed. To do so, go to the Drawing tab andadd/remove lines and vertices of the vessel.6.In the model browser, go to Environment.a.Under Seabed change the water depth.b.If desired, the wave properties can be given under Waves.7.The mooring can now be presented in the model.a.Click on the New Line icon on the toolbar and add a mooring line to the model. In themodel browser, open Line1.b.Under Connect to Object: Fix one end to Platform and one end to Anchored.c.Under Object Relative Position, set the desired positions of the ends of the mooringcable.d.If needed, change the Length and Target Segment Length under Structure.e.Repeat 7 a-d for each mooring line.8.Change the properties and attributes of the mooring by opening Line Type1 in the ModelBrowser.9.The next step in the assembly of the model is to include bodies that account for the quadraticdrag force the platform.a.Click on New 6D Buoy on the toolbar and add the buoy to the model. In the modelbrowser, open 6D Buoy1.b.Click on Give Buoy Negligible Properties in the bottom of the window.c.Set Type to Spar Buoy.d.Set Connection to Platform.e.Set Initial Position and Attitude of the origin of the element.f.Under Geometry:i.Discretize the body into smaller sub-bodies of desired length by increasing thenumber of Cylinders. This is done to ensure sufficient resolution of the dragalong the body. Note: Remember to extend the body above the MWL.ii.All cylinders must have the Outer Diameter set to a small non-zero value. This is done to make sure there is no extra submerged volume and hence no extrahydrostatic stiffness, because this is already accounted for under Vessel Type1.g.Under Drag and Slam:i.Define the Areas and Coefficients under Drag Forces.h.Repeat 9 a-g if multiple drag members are desired.10.The final step needed is to prescribe an Applied Load on the Platform. This step is crucial toensure the simulation begins at equilibrium.a.Define the total mass of your system. This can be found in the *.ED.sum file on line 64under Mass Incl. Platform.b.Multiply the mass by -Gravity to get the total force in Z (here named FzFAST). Note:Gravity is by default 9.80665 m/s2 in OrcaFlex and set within the FAST ElastoDyn inputfile.c.In OrcaFlex, run Single Statics (F9), open Select Results (F5). Select Summary Resultsand double click Platform. Under Loads in Global Axes Directions, the forces in Z aresummed up. The Total force has to be equal and opposite to FzFAST. If this is not thecase:i.Open the Platform from the model browser.ii.Go to the Applied Loads tab.iii.Set Global Loads to 1.iv.Under Applied Force (relative to global axes) put in the force correction underZ.v.Close the window and repeat 10c to verify equilibrium.Provided ExamplesThree different example models (all using the NREL 5-MW turbine) and eight different test cases are provided with the FASTlink archive, as summarized in Table 2.Table 2: Content of the Example Models Provided with the FASTlink ArchiveName DescriptionMIT-NREL_TLP MIT/NREL tension-leg platform (TLP) exposed to stochastic wind and waves OC3_Spar OC3-Hywind spar exposed to stochastic wind and wavesOC4_LC_1.3a Free surge decay of the OC4-DeepCwind semisubmersibleOC4_LC_1.3b Free heave decay of the OC4-DeepCwind semisubmersibleOC4_LC_2.1 OC4-DeepCwind semisubmersible exposed to deterministic wavesOC4_LC_2.2 OC4-DeepCwind semi-submersible exposed to stochastic wavesOC4_LC_3.1 OC4-DeepCwind semisubmersible exposed to deterministic wind and waves OC4_LC_3.2 OC4-DeepCwind semisubmersible exposed to stochastic wind and waves SimulateThe simulation is started from FAST and FAST is run normally. E.g., for a 64-bit simulation, open a Windows command prompt to a folder where all the simulation files are housed and type:FAST_x64.exe NRELOffshrBsline5MW_Floating_OC3Hywind.fstThe simulation will run with FAST coupled to OrcaFlex. Once it is completed, the FAST-related outputs are written to the normal FAST output files and the OrcaFlex-related outputs are written to the OrcaFlex simulation file, <OrcaIptFileName>.sim, accessible through OrcaFlex.Appendix A: OrcaFlexInterface Module Input FileThis example input file is for the OC3-Hywind spar offshore turbine. Another set of example input files using the MIT/NREL TLP and the OC4-DeepCwind semisubmersible are also available.------- OrcaFlex Interface v1.00.* INPUT FILE ----------------------------------Test for OrcaFlex interface to FAST v8---------------------- SIMULATION DATA -----------------------------------------False Echo - Echo input data to "<RootName>.ech" (flag)NRELOffshrBsline5MW_Floating_OC3Hywind_Orca OrcaIptFileName - name of OrcaFlex input file without the .dat file extension (relative, or including the full path)FASTLinkDLL.dll DLL_FileName - name of dll to use for OrcaFlex including the .dll file extension (relative, or including the full path)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Line 定义
Connection ( End A & End B)
End connection End position End orientation End release
Connection stiffness
单击此处编辑副标题
-设计公司
二零一四年十一月
海洋石油工程股份有限公司
第一部分:软件整体介绍 第二部分:分析流程介绍
第三部分:分析实例
2
Orcina公司简介
模型单元 (link、winch、shape) 环境参数
Orcaflex软件介绍
软件主界面 建模常规流程介绍
模型单元(line)
环境参数(seabed)
1 Shape Flat Profile 3D 2 Seabed Origin 3 Stiffness & Damping
P22
环境参数(wave)
Wave Type Single airy Stokes’ 5th Spectrum Time history ……
Direction Height Period
P23
环境参数(wind)
Wind Type Constant Spectrum Time history Direction Speed
P24
环境参数(current) Current Data Direction Speed Profile Depth Factor rotation
P11
Line 定义
Statics
Catenary Spline Quick Prescribed User specified
P12
Line 定义
Structure Attachment
P13
模型单元(Link)
本身不具备质量和水动力属性,用于连接
任意的两个点,并传递拉力/压力,常用于 模拟钢丝绳
P37
谢谢!
模型单元(Link)
Type
Tether
Spring/Damper
模型单元(Link)
Connection Release Drawing Stiffness
P16
模型单元(winch)
主要用于模拟绞车,提供持续的拉力或恒 定的牵引速度
模型单元(Winch)
Connection Winch Wire Control
P29
模型单元(vessel)
通常用于模拟海洋浮式结构物,如海 洋平台,工程船舶等
P30
模型单元(vessel)
Vessel Data
Vessel Type Draught Initial Position Calculation Others ……
P31
模型单元(vessel)
竞争软件对比
同类型的软件:
1. Flexcom (MCS, Ireland) 2. Deeplines (Principia, France) 3. Riflex (DNV/Marintek, Norway) Flexcom 是全球范围主要竞争者。 Deeplines 和 Riflex 主要在法国和挪威地区。 OrcaFlex 和 Flexcom约占海洋工程线动力分析市场80%的份额 OrcaFlex在全球的市场份额约是Flexcom的2.5倍 分析同样的问题及工况,可给出相同或相近的结果
P25
环境参数(others)
Sea Sea Density Wave Preview Drawing
P26
建模常规流程
1、初始设置 单位、模拟时间、 环境条件……
2、建立单元类型 Line type、 vessel type……
3、建立不同模型 单元,并进行相 关参数设置
4、模型检查 检查all objects data & 输出yml 格式文件
P27
第一部分:软件整体介绍 第二部分:分析流程介绍
第三部分:分析实例
28
模型单元(Vessel) 模型单元(Buoy) 常用快捷键 Orcaflex 静态及动态分析 输出结果讲解
数据后处理讲解
实例演示(单CASE)
数据批处理方法讲解 源自例演示(多CASE) 模态分析、疲劳分析介绍
模型单元(shape)
简单的三维几何形状,可用于模拟障碍物 、月池或者仅作为图形示意
模型单元(Shape)
Connection Type
Geometry
Stiffness & damping
环境参数
Seabed Wave
Wind
Current Others……
Sep-13 Oct-12 Oct-11 Aug-10 Aug-09 Aug-08 Aug-07 Sep-06 Nov-05 Feb-05 Jun-04 Dec-03 Jul-03 Dec-02 Sep-02 May-02
Latest Release 9.8a
9.7d 9.6c 9.5d 9.4g 9.3c 9.2f 9.1e 9.0g 8.7d 8.6d 8.5d 8.4e 8.3d 8.2c 8.1b 8.0e
P8
基本工具栏
主要数据格式 .dat,模型数据 .yml,模型数据(可编辑文本)
Model Brow ser
模型显示栏
.sim,计算结果 .wrk,结果显示
P9
模型单元(LINE)
通常用于模拟海洋立管、系泊线 、海管等细长结构体 Line type Chain Rope/wire
Line with floats
实例演示 实例演示
P3
企业背景
成立于1986年,公司位于英国Ulverston,主要提供海洋工程结构及水 动力项目咨询 目前致力于软件开发工作 数学专业人员,软件开发人员, 机械、力学专业人员及海洋工程技术 人员
OrcaFlex是一款世界领先的动力学分析计算的海洋工程软件包,主要应用于: 海洋工程学 地震防御 海洋工学 海洋学研究 水产业
主要特点及优势
软件易用性:
海洋工程细长结构物动力计算分析+环境载荷 多任务、批处理、分析能力高效 便利、直观、高质量的图形用户界面,可以简单、快速的建立模型 使用功能: 系统图像显示可选线框或者三维实体显示 可选择隐式或显式的积分迭代法 浮体与线杆结构的耦合分析 分析模型可包括风、浪、流等环境参数 可建立各种海底条件,包括平整海底面,二维海底及三维海底 可用第三方软件如:Excel, Text file, Python, Matlab进行批处理操作 可进行干涉分析、疲劳分析(包括VIV分析)、模态分析
模型单元(buoy)
均具有质量属性,通常连接不同结 构并传递载荷 3D buoy 3自由度的平动 6D buoy 6自由度运动
P33
常用快捷键
F1:帮助 F6:显示/隐藏模型浏览器(model browser) F7:显示软件参数名称(用于编辑脚本文本) Ctrl+H:显示/隐藏模型 Crtl+C/Ctrl+V:复制/粘贴 Crtl+P/Ctrl+T:俯视图/侧视图 Crtl+左键/Shift+左键:转动/平动
Frequency domain. Advanced constraint modelling: hinges/articulations/pivots/constraine d dofs etc. Line results reporting at nodes in addition to mid-segments. Better results reporting for static state analyses. Line payout, especially for modelling inertia and drag on winches, pipelay etc. Restarts. Lateral seabed resistance modelling, thermal/pressure expansion, pipelines. Software licensing rather than dongles.
P5
Focused next:
Version First Release OrcaFlex 9.8 Date Oct-14
OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex OrcaFlex 9.7 9.6 9.5 9.4 9.3 9.2 9.1 9.0 8.7 8.6 8.5 8.4 8.3 8.2 8.1 8.0
Vessel type
Structure
Conventions
Displacement RAOs Load RAOs
水动力参数可通过第三 方软件直接导入(如 WAMIT、AQWA)
Wave Drift
Stiffness, Added Mass, Damping Other Damping Current Load Wind Load Drawing/Shaded Drawing
P34
输出结果讲解
Result type Object Period Variable
P35
数据后处理讲解