关于图像匹配的综述
图像匹配综述

2 关 键 技 术
( 2 ) 特征空间 。提取 待 测 图 像及 目标 图像 的部 分 特征
然 后 通 过 对 比 特 征 空 间 进 行 大量 优 秀 的 国 内 外 学 者 都 将 自己 的 精 力 投 人 到 图 像 匹 或 是 主 要 特 征 构 成 特 征 空 间 , 配研 究 中, 因 此 产 生 了 海 量 的 图 像 匹 配 算 法 。这 些 算 法 各 匹 配 。所 以 , 构 建 合 理 而 恰 当 的 特 征 空 间 不 但 能 提 高 图 像 通 过 多 种 教 学 模 式 的灵 活 运 用 来 预 防 此 类 问 题 。 比 如 对 某 积 极 性 , 也一定程度 上减轻 了教师 的负 担 , 且 更 有 助 于 双 方 些 问题 的 学 习 我 们 采 用 探 究 式 模 式 , 课 堂 只 介 绍 相 关 背 景 思 想 的 交 流 , 特 别 是 能 使 教 师 更 了 解 学 生 在 该 领 域 内 所 关 知识 , 要 求 学 生 自己 去 探 究 与 其 相 关 的 问 题 , 并 通 过 分 组 引 注 的 内 容 。 入 竞争 , 要求各组 收集 整 理 资料 , 并 自己寻 求解 答 ( 当 然 在 3 结 语
图 像 匹配 是 指 通 过 特 定 的 某 种 算 法 在 某 待 测 图 像 或 待 像 匹 配 技 术 的 研 究 及 算 法 主要 包 含 以下 四个 方 面 : 测 图像的 子图 中( 也 就 是搜 索图 像) 寻 找 目标 图 像 ( 也 称 为
( 1 ) 相似度 。相似 度是相 似性度 量 的简称 , 主要 用来 衡
理 论 发 展 的 源 泉 。在 该 领 域 经 常 有 新 的 发 展 、 新 的 素 材 需
此 过 程 中教 师 也 提 供 相应 的 指 导 ) , 再 将 其 成 果 发 布 到 平 台 网 络 教 学 平 台 为 教 师 与 学 生 之 间 的互 动 提 供 了 良 好 的
基于SIFT算法的图像配准综述
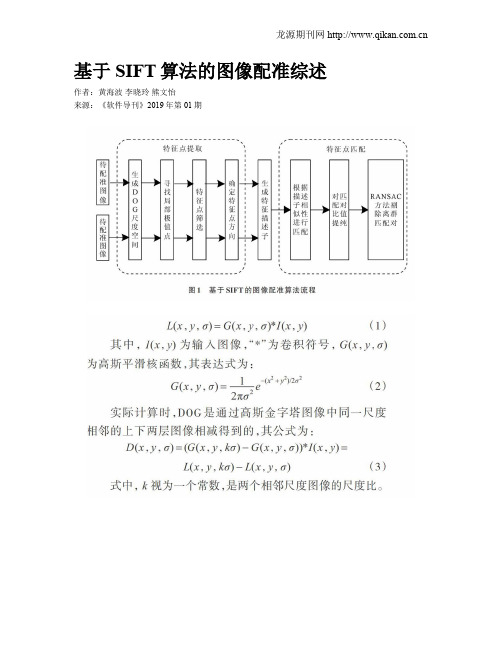
基于SIFT算法的图像配准综述作者:黄海波李晓玲熊文怡来源:《软件导刊》2019年第01期摘要:SIFT图像配准是图像处理领域的一项重要技术,在遥感测绘、目标识别、图像及视频检索、导航制导和场景分类等多个领域应用广泛。
在对现有SIFT图像配准文献研究的基础上,介绍了经典SIFT算法,将各种SIFT改进方法划分为基于特征点提取的改进和基于图像匹配的改进两类,对各类型的改进方法进行了系统阐述。
介绍了点特征图像配准算法性能评价指标,展望了该算法的研究前景。
关键词:SIFT;图像配准;点特征;图像处理DOI:10. 11907/rjdk. 182042中圖分类号:TP301 文献标识码:A 文章编号:1672-7800(2019)001-0001-04Abstract: Image registration based on SIFT is an important technology in image processing. This technology has been widely used in many fields such as remote sensing mapping, object identification, image and video retrieval, navigation guidance and scene classification. With the study of existing documents of SIFT image registration, the classical SIFT algorithm is introduced in this paper. And the improved methods of SIFT are divided into two categories: the improvement of feature point extraction and the improvement of image registration. And then, the systematical introduction of them are conducted. At the same time, several performance evaluation standards of feature points image registration algorithms are introduced, and the research prospects of this algorithm are forecasted.Key Words: SIFT; image registration; point feature; image processing0 引言图像配准是对不同时间、不同角度或不同传感器获取的同一场景两幅或多幅图像进行空间对准的过程[1]。
医学影像技术中的图像配准方法综述与性能评估
医学影像技术中的图像配准方法综述与性能评估摘要:在医学影像技术中,图像配准发挥着至关重要的角色。
本综述旨在深入探讨在医学影像技术中应用的图像配准方法,并对其性能进行评估。
此文首先讨论了图像配准的基本知识,并概述了其在医学影像技术中的应用。
然后,详细介绍了各种主要的图像配准方法,并通过比较和分析评估了它们的性能。
最后,本文探讨了图像配准方法的未来发展趋势,包括面临的挑战与可能的解决方式。
本篇综述的目标是提供一个全面的进展和发展趋势的概述,以期对图像配准的研究和应用提供深入的了解。
关键词:医学影像技术;图像配准;性能评估;图像处理;图像分析;深度学习一、引言1.背景介绍:在当今医学技术高度发展的背景之下,医学影像技术作为医疗诊断和治疗的重要组成部分,受到广泛关注。
更为关键的是,图像配准作为重要的影像处理步骤,弥补了从多源影像中获取信息的局限性,如时间、视角和模态等,对临床治疗和研究具有至关重要的影响。
图像配准的准确性和效率直接关乎到诊断准确率和治疗效果。
2.目的和目标:本文的主要目标是对医学影像技术中的图像配准方法进行全面系统的综述,并对各种配准方法进行性能评估和比较。
旨在通过对各种图像配准新技术和方法的研究,对图像配准性能进行提升,为疾病的诊断和治疗提供更为准确的医疗影像资源。
此外,还希望能找出影响图像配准性能的因素,以期找到改进图像配准性能的有效方法,进一步推动医学影像技术的发展,提高医疗服务质量。
本文的研究将理论和实证相结合,旨在产生对实践有重要影响的理论成果和切实可行的技术指导建议,为医学影像技术研究和应用提供科学的理论支撑和实践参考。
二、医学影像技术概述1.定义和分类:医学影像技术是应用科学和技术手段获取和处理身体各组织和系统图像的一种技术。
它将生物信号转换为可视化的图像,帮助医生进行诊断和治疗。
根据成像原理和所使用的设备不同,医学影像可以大致分为X射线成像,核磁共振成像(MRI),计算机断层扫描(CT),超声波成像,放射性核素成像(PET,SPECT)等。
图像特征检测与匹配方法研究综述

图像特征检测与匹配方法研究综述图像特征检测与匹配是计算机视觉领域的重要研究方向,它在许多实际应用中发挥着关键作用,如图像检索、目标识别和三维重建等。
本文对图像特征检测与匹配方法进行综述,主要包括特征检测算法、特征描述算法和特征匹配算法三个方面。
一、特征检测算法特征检测算法旨在寻找图像中的稳定不变性特征点,以便用于后续的特征描述和匹配。
常用的特征检测算法包括Harris角点检测算法、SIFT 算法和SURF算法等。
1. Harris角点检测算法:该算法通过计算图像的局部灰度变化,寻找具有最大角度变化的像素。
它能够有效检测出图像中的角点,但对于尺度变化和旋转不变性较差。
2.SIFT算法:SIFT算法通过构建高斯金字塔和尺度空间极值检测,寻找出图像中的尺度不变的关键点。
同时,通过计算局部图像的梯度方向直方图,生成特征向量描述子,实现图像的匹配。
3. SURF算法:SURF算法是SIFT算法的改进版本,采用了一种快速的积分图像技术,大大提高了计算效率。
SURF算法在计算图像的尺度空间极值点时,使用了一种基于Hessian矩阵的指标,检测出更加稳定的特征点。
二、特征描述算法特征描述算法利用特征点周围的图像信息,生成唯一且具有区分度的特征向量。
常用的特征描述算法有SIFT描述子、SURF描述子和ORB描述子等。
1.SIFT描述子:SIFT描述子通过计算特征点周围的梯度信息,生成128维的特征向量。
它具有较强的区分度和旋转不变性,在图像匹配任务中表现较好。
2. SURF描述子:SURF描述子是一种基于Haar小波特征的描述子,使用了一种积分图像计算方法,降低了计算复杂度。
SURF描述子的维度为64维,具有良好的尺度不变性和旋转不变性。
3.ORB描述子:ORB描述子是一种快速的二值描述子,基于FAST角点检测算法和BRIEF描述子。
它既具有较快的计算速度,又能够保持较好的特征区分度,适用于实时图像处理任务。
三、特征匹配算法特征匹配算法的目标是在不同图像中找到相互匹配的特征点对。
基于图像匹配的特征点检测方法综述

0 引言图像特征点是一幅图像中比较典型的特征标志之一,它含有显著的结构性信息。
一般为图像中的线条、交叉点、边界封闭区域的重心或者曲面的高点等。
图像特征点检测的方法是对一幅图像进行描述的必要手段。
在图像匹配、目标检测与识别等图像处理与分析应用中都是关键重要的步骤。
本文对图像匹配中采用的特征点以及提取方法进行深入研究探讨,分析比较几种成熟的特征点检测方法和一些新的特征点提取方法,对这些特征点的基本特点、改进方法、性能优缺点进行详尽分析。
1 特征点检测图像中存在明显表现图像特征的特征点 (角点或关键点),图像匹配通常利用特征点来估计图像之间的变换, 而不是利用图像全部的信息。
特征点的检测方法很多,本文对图像拼接中常用的重要特征点进行分析比较。
1.1 Harris角点检测Harris角点检测是一种基于图像灰度的一阶导数矩阵检测方法。
检测器的主要思想是局部自相似性/自相关性,即在某个局部窗口内图像块与在各个方向微小移动后的窗口内图像块的相似性。
虽然Harris角点检测算子具有部分图像灰度变化的不变性和旋转不变性,但它不具有尺度不变性。
但是尺度不变性对图像特征来说至关重要。
2001年Mikolajczyk等人把Harris-Laplace和Hessian-Laplace 结合在一起[2],创造出了一种鲁棒的、尺度不变、重复检测率很高的检测算子,弥补了Harris算子在尺度不变性上的不足。
1.2 SIFT (Scale Invariant Feature Transform)特征点检测1999年Lowe首次提出了SIFT算法特征点检测,可以处理两幅图像之间发生平移、旋转、仿射变换情况下的匹配问题,具有良好的不变性和很强的匹配能力。
2004年,Lowe提高了高效的尺度不变特征变换算法(SIFT)[3],利用原始图像与高斯核的卷积来建立尺度空间,并在高斯差分空间金字塔上提取出尺度不变性的特征点。
该算法具有一定的仿射不变性,视角不变性,旋转不变性和光照不变性,所以在图像特征提高方面得到了最广泛的应用。
医学影像分析中的图像配准方法综述

医学影像分析中的图像配准方法综述医学影像分析是指利用图像处理、模式识别和机器学习等计算方法对医学影像进行分析和处理,以获取相关的解剖、功能和病理信息。
而图像配准是医学影像分析的一个重要环节,它指的是将不同模态或不同时间点获取的医学影像图像进行准确的对齐,以便在后续分析和研究中提供更可靠的结果。
医学影像配准方法的目标是将不同的图像进行对齐,使得它们在空间和几何上相互吻合。
这样做的优点是提高了医学影像分析的准确性和可信度,同时也为临床医生和研究人员提供了更全面的信息,以便更好地诊断疾病、研究病变发展和评估治疗效果。
医学影像配准方法可以分为刚性配准和非刚性配准两大类。
刚性配准(Rigid Registration)是指通过旋转、平移和缩放等刚性变换使得图像彼此对齐。
刚性配准适用于同一器官的不同扫描或同一时间点的不同斜视图像等情况。
它的优点是计算快速、操作简单,但局限性在于无法处理组织形变引起的图像变化。
而非刚性配准(Non-rigid Registration)克服了刚性配准的局限性,它可以处理器官形变、组织变形以及疾病进展引起的图像差异。
非刚性配准算法基于局部区域的相似性进行配准,并对图像进行局部形变模型的建立,常见的方法有弹性体变形(Elastic Deformation)、三维网格配准(3D Mesh Registration)和基于特征的配准(Feature-based Registration)等。
在医学影像配准中,常用的方法有基于互信息(Mutual Information)的配准、基于特征点匹配的配准和基于局部图像特征的配准等。
基于互信息的配准算法是一种无需事先标记特征点的配准方法,它通过最大化目标图像和参考图像之间的互信息量来完成图像的配准。
互信息测量的是两个图像之间的统计相关性,由于它不受图像灰度变化和噪声的影响,因此被广泛应用于医学影像配准领域,尤其适用于多模态影像的配准。
基于特征点匹配的配准算法是一种通过识别图像中的关键特征点,并对其进行匹配和对齐的方法。
图像匹配算法的研究进展

图像匹配算法的研究进展一、本文概述随着信息技术的飞速发展,图像匹配算法在诸多领域,如人脸识别、物体追踪、自动驾驶、医学影像分析以及遥感图像处理等,都发挥着越来越重要的作用。
图像匹配算法的核心在于通过一定的算法和策略,从大量图像中快速准确地找到目标图像,或者从同一场景的不同图像中找出相似或相同的部分。
本文旨在探讨图像匹配算法的研究进展,包括经典的算法、新兴的算法以及它们在不同领域的应用。
我们将回顾传统的图像匹配算法,如基于特征的方法、基于灰度的方法等,分析它们的优缺点以及适用场景。
然后,我们将重点介绍近年来兴起的深度学习在图像匹配领域的应用,包括卷积神经网络(CNN)、孪生网络(Siamese Network)等,以及它们在提高匹配精度和效率方面的突出表现。
我们还将讨论图像匹配算法在实际应用中面临的挑战,如光照变化、视角变化、遮挡等问题,以及针对这些问题的解决方案。
我们将展望图像匹配算法的未来发展趋势,包括算法性能的进一步提升、多模态图像匹配的研究、以及在大规模图像数据库中的应用等。
通过本文的综述,我们希望能够为读者提供一个全面而深入的图像匹配算法研究进展的概览,同时也为相关领域的研究人员提供有益的参考和启示。
二、图像匹配算法的基本原理图像匹配算法是计算机视觉领域的一个核心问题,它旨在从大量图像中找出具有相似性或相关性的图像。
这些算法的基本原理主要基于特征提取和相似性度量两个方面。
特征提取是图像匹配算法的首要步骤。
在这一过程中,算法会从图像中提取出关键信息,这些信息通常是对图像内容的抽象描述,如边缘、角点、纹理、颜色分布等。
这些特征的选择对后续的匹配效果至关重要,因为它们需要既能代表图像的主要内容,又具有一定的鲁棒性,能够在不同的光照、视角、尺度等条件下保持一致。
相似性度量是图像匹配算法的另一关键步骤。
在提取了特征之后,算法需要一种方法来量化两个图像之间的相似性。
常见的相似性度量方法包括欧氏距离、余弦相似度、汉明距离等。
图像处理技术综述
图像处理技术综述图像处理技术是应用于计算机视觉、计算机图形学、人工智能等领域的一种技术,用于改善或增强图像的质量、可视性、信息含量或拟合特定需求。
在当今信息技术快速发展的时代,图像处理技术已被越来越广泛地应用于医学、军事、安全监控、遥感、交通、广告等领域。
一、图像处理的基本流程1、获取图像首先需要获得图像,其方式很多。
例如,用专业摄像机或手机或扫描仪捕获图像。
另外,从互联网或其他共享资源中获取的图像也可以作为处理对象。
2、预处理图像在采集到图像数据后,需要对图像进行预处理。
这主要是为了去除噪声和畸变,以便更好地处理图像数据。
一些常见的操作包括滤波、均衡化、归一化和旋转等。
3、分割图像将图像分成若干个区域,通过分析这些区域来获取有用的信息。
分割可以基于颜色、亮度、纹理、图像特征、形状等进行。
4、提取特征提取图像中的特征是使用智能算法和其他技术来描述图像中重要的信息。
这些特征可以是纹理、边缘、角点或其他模式,并且可以用来判断图片是否满足特定要求。
5、抽取结构信息对于一些需要对图像进行量化和分析的应用,可以从图像中提取出具有代表性的结构信息。
应用某些算法,通过获取的特征和结构信息来分析图像。
根据分析的结果,可以识别物体、建立模型、人机交互等等。
图像滤波是一种常用的基本方法,它主要用于去除图像中的噪声。
常见的滤波方法有平均滤波、高斯滤波、中值滤波等。
图像增强技术是指通过算法将低质量的图像improved以获得更高质量的图像,例如提高对比度、清晰度、亮度等。
图像压缩是将数字图像压缩到尽可能小的空间,使其更容易存储和传输。
最常用的压缩方式是JPEG和PNG。
图像分割是将图像分割成不同的部分,每个部分对应相应的特征,这些部分组成面向目标识别和跟踪的区域。
常用而有效的算法包括K均值聚类、分水岭算法等。
特征提取是将图像中的信息抽象化作为特定可识别模式。
从图像中提取特征通常需要使用泛函分析和模式识别技术。
6、目标识别目标识别即在图像中找到和辨识特定目标,它应用于许多领域,例如医疗图像识别、移动机器人、军事目标等重要领域。
医学图像配准与分割算法评估指标研究综述

因此,对医学图像配准与分割算法进行评估和 比较,选择最适合特定应用的算法,具有重要 的理论意义和实践价值。
国内外研究现状及发展趋势
国内外学者在医学图像配准与分割算法方面开展了大量研究工作,提出了 许多优秀的算法和方法。
3
基于深度学习的分割算法
通过训练神经网络实现图像分割,能够处理复杂 的医学图像分割任务,分割精度高,但需要大量 训练数据。
配准与分割算法联合应用性能分析
01
配准算法对分割结果 的影响
准确的图像配准能够提高分割算法的 精度和稳定性,减少分割误差。
02
分割算法对配准结果 的影响
精确的图像分割能够为配准算法提供 准确的特征点和边界信息,提高配准 精度。
03
医学图像分割算法评估指标
区域一致性评估指标
01
Dice相似度系数(Dice Similarity Coefficient, DSC):用于衡 量两个样本的相似度,取值范围在0-1之间,值越大表示相似度 越高。在医学图像分割中,DSC通常用于评估分割结果与金标准 之间的区域一致性。
02
Jaccard相似度系数(Jaccard Similarity Coefficient, JSC ):与Dice相似度系数类似,用于衡量两个集合的相似度 。在医学图像分割中,JSC同样用于评估分割结果与金标 准之间的区域一致性。
信息变化指数(Information Variation Index, IVI):衡量分割结果相对于金标准的信 息变化程度。IVI越小,表示分割结果越准确。
标准化互信息(Normalized Mutual Information, NMI):衡量两个图像之间的互信 息程度。在医学图像分割中,NMI用于评估分割结果与金标准之间的综合性能。NMI
多模态图像匹配与配准技术研究

多模态图像匹配与配准技术研究多模态图像匹配与配准技术是计算机视觉领域的重要研究方向,其在医学图像处理、遥感图像处理、计算机辅助设计等领域具有广泛应用。
本文综述了多模态图像匹配与配准技术的研究现状和挑战,并对其未来发展方向进行了展望。
关键词:多模态图像、匹配、配准、计算机视觉1. 引言多模态图像是指来自不同传感器或不同成像原理的图像,具有不同的特征和表示方式。
在很多应用中,需要将不同模态的图像进行匹配和配准,以实现信息融合或者特定任务的完成。
例如,在医学影像中,需要将CT扫描和MRI扫描进行对齐以实现精确诊断;在遥感影像中,需要将光学影像和雷达影响进行融合以获取更全面的地理信息。
2. 多模态图像特征提取由于不同传感器或成像原理导致的差异性,多模态图像之间存在着显著差异。
因此,首先需要对多模态图像进行特征提取,以获得能够描述图像内容的特征表示。
常用的特征提取方法包括局部特征描述子(如SIFT、SURF、ORB等)、全局特征(如颜色直方图、纹理特征等)以及深度学习方法(如卷积神经网络)等。
3. 多模态图像匹配方法多模态图像匹配是指在不同模态的图像之间建立对应关系的过程。
常用的多模态匹配方法包括基于局部特征描述子的匹配、基于全局特征的匹配以及基于深度学习的匹配方法。
3.1 基于局部特征描述子的匹配基于局部特征描述子的多模态图像匹配是指利用SIFT、SURF等算法提取两幅不同模态图像中关键点,并计算其对应关系,从而建立两幅图像之间的对应关系。
该方法具有较好的鲁棒性和准确性,但对噪声和遮挡较为敏感。
3.2 基于全局特征的匹配基于全局特征表示进行多模态图像匹配是指将两幅不同模态图像分别转换为全局特征表示,然后计算其相似度,从而建立两幅图像之间的对应关系。
该方法不依赖于局部特征的提取和匹配,具有较好的鲁棒性和计算效率。
3.3 基于深度学习的匹配方法近年来,深度学习在计算机视觉领域取得了巨大的成功。
基于深度学习的多模态图像匹配方法是指利用卷积神经网络对不同模态图像进行特征提取和匹配。
多视角图像融合算法综述

多视角图像融合算法综述图像融合是一种将多幅图像融合成一幅结果图像的技术。
随着科技的发展和人们对图像质量的要求不断提高,多视角图像融合算法成为了研究热点。
本文将对多视角图像融合算法进行综述,分析其各种方法和应用。
1. 引言多视角图像融合算法的研究与应用涉及多个领域,包括计算机视觉、图像处理、机器学习等。
其主要目标是能够合成一幅更加清晰、更具信息丰富性的图像,并能够从多个视角中获取更多的细节。
多视角图像融合算法可应用于许多领域,如遥感图像、医学影像等。
2. 多视角图像融合算法的分类2.1 基于传统图像处理的方法传统的图像处理方法主要包括像素级融合、变换域融合和区域级融合三种。
2.1.1 像素级融合像素级融合是一种将多个图像的像素进行简单叠加或加权求和的方法。
这种方法简单直观,易于实现,但容易导致图像失真和信息丢失。
2.1.2 变换域融合变换域融合是基于图像的频域变换,如小波变换和离散余弦变换(DCT)。
通过对不同图像进行变换域分析和合成,可以达到多视角图像融合的目的。
然而,变换域融合方法对不同图像的频谱分量有一定假设,因此可能导致失真。
2.1.3 区域级融合区域级融合方法是基于图像的区域分割和匹配,将不同图像中相似的区域进行融合。
这种方法能够更好地保留图像的细节和结构,但需要进行复杂的图像分割和匹配,计算复杂度较高。
2.2 基于深度学习的方法近年来,深度学习在图像处理领域取得了重大突破。
多视角图像融合算法也开始采用基于深度学习的方法。
2.2.1 卷积神经网络(CNN)卷积神经网络是一种可以自动学习图像特征的神经网络。
通过训练大量的图像数据,CNN可以学习到图像中的细节和结构,并将多个视角的图像进行融合。
2.2.2 生成对抗网络(GAN)生成对抗网络是一种通过两个神经网络进行对抗训练的模型。
其中一个网络为生成器,负责生成合成图像;另一个网络为判别器,负责判断生成的图像是否真实。
通过不断迭代训练,GAN可以生成更加真实且细节丰富的多视角图像。
多视角乳腺X线图像匹配方法综述

多视角乳腺X线图像匹配方法综述陈后金;李艳凤;彭亚辉【期刊名称】《数据采集与处理》【年(卷),期】2016(31)5【摘要】乳腺 X线摄影术是目前乳腺疾病的主要检查方式之一,采用图像处理与模式识别的方法对乳腺 X线图像进行分析,可以辅助医生发现漏检的病变,识别出假阳性组织,有效降低漏诊率和误诊率。
基于图像处理的方法应模拟医生阅片机制,因而基于多视角的乳腺癌检测与分类方法更加适合临床的要求。
多视角乳腺癌检测的基础是确定不同视角图像间的匹配关系,本文较为全面地讨论了乳腺 X线图像多视角匹配方法。
首先对现有乳头检测和胸肌分割方法进行回顾,并对比分析了不同方法之间的优缺点;然后讨论了现有双视角匹配以及双边匹配方法;最后对现有匹配方法存在的问题进行分析,并提出了改善措施。
%Mammography is one of the most widely used methods for breast cancer detection.The tech-nique and theory of image processing and pattern recognition can be used for mammogram analysis.The analytical results can assist radiologist in finding missed tumors and identifying false positive tissues, leading to low false negative rate and false positive rate.The method using image processing should simu-late the mammogram interpretation of the radiologist.Thus,the breast cancer detection and classifica-tion method based on multi-view is rather suitable in clinical practice.Determination of the correspon-dence between multi-view mammograms is the foundation for multi-view detection.Here,an overview of recent developments indetermining correspondence between multi-view mammograms is presented.Nip-ple detection and pectoral muscle segmentation are first summarized.Both advantages and disadvantages of different methods are compared.Then two-view matching and bilateral matching are discussed.Final-ly,the problems in the existing matching methods are analyzed and improvements are suggested.【总页数】11页(P845-855)【作者】陈后金;李艳凤;彭亚辉【作者单位】北京交通大学电子信息工程学院,北京,100044;北京交通大学电子信息工程学院,北京,100044;北京交通大学电子信息工程学院,北京,100044【正文语种】中文【中图分类】TP391【相关文献】1.乳腺X线三维成像新方法:数字乳腺断层摄影和锥光束乳腺CT [J], 尹璐;叶兆祥2.图像匹配方法综述 [J], 汪洋3.基于迁移学习的多视角乳腺肿块和钙化簇分类方法 [J], 肖禾; 刘志勤; 王庆凤; 黄俊; 周莹; 刘启榆; 徐卫云4.多视角判别度量学习的乳腺影像检索方法 [J], 周国华;蒋晖;顾晓清;殷新春5.基于图像匹配的特征点检测方法综述 [J], 杨济瑞;张晓燕;罗攀因版权原因,仅展示原文概要,查看原文内容请购买。
视差图像配准技术研究综述
普通相机受限于焦距与传感器,采集的图像有时无法满足人们对于高分辨率与宽视角的图像的需求,为了利用普通相机获得此类特定需求的图像,图像拼接技术应运而生。
图像拼接技术是指通过对输入的、具有重叠部分的图像序列进行图像预处理、图像配准、图像融合等操作,将其拼接成一幅具有高分辨率、宽视角图像的技术。
目前该技术广泛地应用在无人驾驶[1]、虚拟现实[2]、遥感图像处理[3]、医学成像[4]、视频编辑[5]等领域。
图像拼接算法通常可分为图像配准与图像融合两个步骤。
其中,图像配准是核心,也是解决视差问题的关键。
图像配准的难点在于如何构建一个更加精准、合适的模型,以减少配准误差且不破坏图像内容的结构。
根据相机的运动状况,图像配准算法主要可分为单视点配准算法和多视点配准算法两种。
图像视差产生于多视点情况下,具有视差的图像的配准是长期以来图像配准技术中的一个挑战,也是当前的研究热点。
近年来,针对视差图像配准的研究工作多数采用基于特征的空域变换方法。
根据生成变形模型的方式不同,可主要将其分为基于多平面对齐的图像配准、基于网格变形的图像配准以及缝合线驱动的图像配准三类。
本文对三类方法近年的一些相关工作进行了分析并讨论了其优缺点。
1视差问题概述与图像配准流程1.1视差形成原因视差是指从具有一定间隔的两个点上观察同一目标时产生的方向上的差异。
在拍摄时,如果相机的位置视差图像配准技术研究综述夏丹,周睿华中师范大学教育信息技术学院,武汉430079摘要:传统图像配准技术受限于严苛的初始输入已难以满足人们的需求,近年来,视差图像的配准逐渐成为图像拼接技术中的研究热点。
基于视差形成原理介绍了视差图像配准的难点与一般流程。
主要研究了基于特征的视差图像配准技术,对近年来视差图像配准的研究成果进行了归纳梳理,并从基于多平面对齐的图像配准、基于网格变形的图像配准以及缝合线驱动的图像配准三个方面进行阐述。
通过对各种典型的视差图像配准算法的算法思想、特点以及局限性进行描述和比较,提供该领域研究现状的系统综述,并对视差图像配准技术的研究趋势进行了展望。
图像匹配综述上课讲义
图像匹配综述图像匹配综述摘要:主要从图像匹配技术的概念、一般性描述及图像匹配技术的技术分类对图像匹配进行描述,在图像匹配技术的分类中,对各个方法的优缺点进行了详细的说明。
关键词:图像匹配;一般性描述;分类随着科学的飞跃发展,近年来图像匹配技术在许多方面有着非常重要的应用,尤其是在医学方面、运动物体的跟踪、计算机视觉、天气预报以及各种资源分析等方面运用非常广泛。
本文对图像匹配进行综述,以便读者对其有个粗略的了解。
一、图像匹配的概念图像匹配的概念:在两幅图像中,从一幅图像中寻找与另一幅具有相同或相似的过程。
二、图像匹配的一般性描述图像匹配可以描述为:假设给定大小分别为m Xm和n Xn像素图像hl (x, y)及h2 (x, y),它们的映射关系为:h2 (x, y) =g ( hl (a (x, y)),( 2-1)式(2-1 )中,符号a是二维或者多维的几位变换(x ')=a (x, y),符号g为一维或者多维图像的亮度变换。
匹配图像问题的实质是寻找两幅图像的最佳几何变换a和亮度变换,最终的目的是使预先定义的那种测度为最小值或者达到最大值,以达到两幅待匹配图像的匹配。
匹配图像的关键主要是下列因素选择的一个组合:待匹配图像的特征空间、相似度、几何变换类型和参数的搜索策略。
下表2-1给出了待匹配图像的特征空间、相似度及搜索策略的几个主要要素及它们对应的内容。
表2-1待图像匹配的三个关键因素三、图像匹配技术的分类图像匹配技术算法分类很多,但都遵守这样的基本原则:(1)算法必须是有效的。
(2)算法必须是稳定的,当待匹配的图像发生旋转、尺度伸缩及被遮挡时,此种算法仍能使用。
(3)算法必须是快速的。
1•基于图像灰度相关的匹配方法基于图像灰度匹配算法是利用整幅图像的灰度信息进行匹配的方法。
几种常见的算法有平均绝对差算法、归一化积相关算法、互信息匹配算法、傅立叶相关算法等。
下面简要介绍以下这几种算法:(1)平均绝对差算法平均绝对差算法是这样定义的:d(x,y)= s(i+x,j+y)-T(i,j)(3-1)其中,0< x< M-m+1 ; 0< y< N-n+1。
图像匹配技术综述

1 图像 匹配 技 术 四要 素 、
般来看 , 图像 匹配 可 以作 为 四个 要 素 的组 成 : 征 空 间 、 特 搜索 空 间 、 似性 测 度 和 搜索 策 略 。 取 特 征 要 考 虑 三点 因 素 : 先 , 相 选 首 选 取 的 特 征 必须 是 原 始 图像 和 待 匹 配 目标 图像 所共 同具 有 的特 征 ; 其 次, 特征集必须包含足够多的分布均匀的特征 ; 再次 , 所选取的特征 要易于特征匹配 的计算。 搜索 空间是在输入特征与原始特征之间建 立 的 对 应 关 系 的可 能 的变 换 集 合 , 像 畸 变的 类 型 与强 度 决 定 了 搜 成 图 1 U AN原 理 示意 图 S S 索 空 间 的 组 成 与范 围。 似性 测 度 的 作 用 在于 对 从 搜索 空 间 中获取 相 S A US N算 子使 用 的是 圆 形模 板 来 进 行 角 点 探 测 , 般 使 用 模 一 的一 个 给 定 的变 换 所 定 义 的输 入 数 据 域 参 考 数 据 之 间 的 匹配 程 度 板 的 半 径 为 3 4 像 元 , 板 在 图像 上 滑 动 , 每 一 个 位 置 求 亮 度 -个 模 在 的评 估 。 索 策 略 是 指在 相似 性 测 度 下达 到最 佳 匹配 的计 算 方 式 , 搜 相 似 比较 函 数 , 算 合 计 值 , 得 到 了U A 并计 就 S N区域 的 面积 , 而后 再 即采用合适的方法在搜索空 间中找到平移 、 旋转等变换参数的最优 跟一个 给定 阈值进行 比较 。 算重心求出核到重 心的距离 , 计 对应正 估 计 , 得 相似性测度达到最大值 。 使 确 角 点 , 重 心 距离 核 较 远 , 能 以距 离 消 除 虚 假角 点 的 影 响 。 后 若 就 最 2、图像匹配技术的分 类 使用非最大抑制 ( x S p rs o ) NoMa u p es n 方法 , i 这样 就可 以找 出角 以往的图像 匹配方法 , 大致可 以分为三类 : 基于特征点 、 灰度分 点 。 近 年 来 , o g 人 提 出 了一 种 自适 应 闯值 的 检 测 算 法 , Yu S n 等 布 和 频 域 。 于 特 征 点 的 图像 匹 配 技 术 是 目前最 常用 的方 法 之 一 , 基 解 决 了S S 子 对 灰 度 细 节 丰 富 的 图像 检 测 效 果 不 佳 的 问题 。 U / N算 其最大的优点是能够将对 整个 图像进行 的各种分析转化为对 图像 2 12SF 特征 点算 法 .. IT 特征点的分析 , 从而大大提高 了运算的速度 , 图像偏移 、 对 旋转 , 灰 sF I T特 征 点 匹 配 算 法引是 D vd G L we 1 9 年 提 出 的 , a i o 在 9 9 度 变化 等 都 有 较 好 的适 应 能力 。 文 的主 要 工作 是 研 究 了这 三 类 图 本 04 像 匹 配 方 法 , 析 各 种 方 法 的 优 缺 点 , 点研 究 了基 于 特 征 的 匹 配 并 于2 0 年 总 结 了 现 有 的基 于 不变 量 技 术 的特 征检 测 方 法 的基 础 分 重 上 , 出 的一 种基 于 尺 度 空 间 的 特 征 匹 配 算 法 。 IT特征 匹 配 算 提 SF 方法 。 法 分 四个 步 骤 来 实 现 : 是 尺 度 空 间 极 值 点 求 取 , 是 特 征 点 位 置 一 二 21基 于 特 征 点 匹配 方 法 . 三 四 匹配 基 于特 征 点 匹配 方法 一 般 分 为 三 个 过 程 : ) 征 点提 取 ; ) (特 1 ( 利 确 定 , 是 为 关键 点 指 定 方 向参 数 , 是 关键 点 描 述 子 的 生成 。 2 的方 法 是 : 获得 第 一 幅 图像 的 特 征 向量 后 , 采样 点 的欧 式距 离 在 将 用一组参数对特征点作描述 ; )I ( 利 用特征点的参数进 行特 征匹配 , 3 取 找 根 据 相 似性 原 则 对 两 幅 图像 中的 特征 点 进 行 匹配 。 最 大 的 优点 是 作 为相 似 性 度 量 。 帧 图像 中某 个 关键 点 , 出 其 与 图像 中 欧 式 距 其 离 最 近 的前 两 个 关键 点 , 这 两 个 关 键 点 中 , 果最 近 的距 离 与 次 在 如 能 够 将 对 整 个 图像 进 行 的 各 种 分 析 转 化 为对 图像 特征 ( 征 点 、 特 特 近 的 比值 小 于 某 个 阈值 , 接 收这 一 对 匹配 点 。 则 降低 比例 阈值 ,IT SF 征 曲线等) 的分析 , 从而大大减小了图像处理过程的运算量 , 对灰度 匹配点数 目会减少 , 但匹配更稳定可靠。 u Moe l G Y 和JM rl 5 克 变 化 、 像 变 形 以 及 遮挡 等都 有 较好 的适 应 能 力 。 面 介绍 三 种 基 图 下 服 了拍 摄 倾 角 过 大 造 成 的 仿射 变 换 的 影 响 , 出 TASF 确 保 了 提 IT, 于 特 征 点 的 匹配 方 法 。 特 征稳定性 , 提高 了鲁 棒性 。 2 11S S .. U AN 特征 点算 法 2 13S R .. U F特 征 点算 法 S AN算法… US 的基本原理是通过 以一个点为中心 的局部 区域 2 0年 , r etB y 出 了S F 法 , 整 体思 路 同SF 0 6 Heb r a [ 1 提 UR 算 其 IT 内 亮度 值 的分 布 情 况来 判 断 平 滑 区域 、 缘 及角 点 。 图 1 示 , 边 如 所 一 类似 , 征 点 检 测理 论 也 是基 于 尺度 空 间 , 在 整 个 过 程 中采 用 了 特 但 个在 图像 上 移 动 的 圆形 模 板 , 板 的 中 心称 为 核 心 , 的 位置 有 以 模 它 与 SF 不 同 的方 法 。 先 , 尺 度 上 定 义 Hes n 阵 , 该 矩 阵 IT 首 在 si 矩 a 用 下五 种 形 式 。 图像 一 定区 域 的每 个 象 素 的 亮度 值 与 核心 点 的 亮 度值 其 为保证旋转 相 比较 , 比较结果相似或相 同的点组成 的区域 叫做US 把 AN( 单值 的行列式计算 图像上特征点的位置和尺度信息 。 次, 不变性 , 确定特征点的主方 向。 以特征点为 中心 , 将坐标轴旋转到主 分割相似核心 )U AN区含有 图像在某个局部区域的结构信息 , 。S 而 方向 , 将其划分成4 的子 区域 , ×4 在每个子 区域形成 四维分量 的矢 大 小反映 了图像局部特征 的强度。
图像匹配方法研究综述
图像匹配方法研究综述一、本文概述图像匹配,作为计算机视觉和图像处理领域的重要研究内容,旨在从大量的图像数据库中寻找与给定查询图像相似或相同的图像。
随着数字图像数据的爆炸性增长,图像匹配技术在许多实际应用中,如目标识别、遥感图像处理、人脸识别、图像检索、视频监控、医学图像分析等领域,都发挥了关键的作用。
然而,由于图像匹配涉及的问题复杂多样,包括光照变化、尺度变化、旋转、遮挡、噪声干扰等因素,使得图像匹配成为一个具有挑战性的研究课题。
本文旨在全面综述图像匹配方法的研究现状和发展趋势。
我们将对图像匹配问题进行明确的定义和分类,阐述其在实际应用中的重要性。
然后,我们将详细介绍传统的图像匹配方法,如基于特征的方法、基于区域的方法、基于变换的方法等,并分析其优缺点和适用场景。
接下来,我们将重点介绍近年来兴起的深度学习方法在图像匹配中的应用,包括卷积神经网络(CNN)、孪生网络、注意力机制等,并探讨其与传统方法的比较和优势。
我们还将对图像匹配的评价指标和常用数据集进行介绍,以便读者对各类方法的性能有更加直观的了解。
我们将对图像匹配方法的未来发展趋势进行展望,以期为相关研究人员提供有益的参考和启示。
通过本文的综述,我们希望能够为读者提供一个全面、深入的图像匹配方法的知识体系,促进该领域的研究进展和应用发展。
二、图像匹配方法分类图像匹配作为计算机视觉和图像处理领域的重要研究内容,其目标是在不同视角、光照、尺度或形变等情况下,找到两幅或多幅图像之间的相似性或关联性。
根据算法的不同特点和应用场景,图像匹配方法大致可以分为以下几类。
基于特征的方法:这类方法首先提取图像中的关键特征,如角点、边缘、斑点等,然后对这些特征进行描述和编码,最后通过特征之间的相似性度量来实现图像匹配。
常见的特征提取算法有SIFT、SURF、ORB等,它们能够在一定程度上应对光照、尺度和旋转等变化。
基于特征的方法通常具有较高的准确性和鲁棒性,但计算复杂度较高,实时性较差。
遥感图像配准方法研究——综述

Th s e hn l g e r v d d i t h e a e o is r y lv lb s d r g o a e it a i n, m a e f a u e o e t c o o is a edi i e n o t r e c t g r e :g a e— a e e i n l g s r to i g t r — e r e ba e e it a i n,a d i a e u d r t n i g a d e p a a i n b e e it a i n Th i p i c p e n s d r g s r to n m g n e s a d n n x l n to — a d r g s r to . s er rn i ls a d r g s r to ro m a c r n l z d a d t er a v n a e n i . e it a i n pe f r n e a e a a y e n h i d a t g sa d d s d a t g s a e p i t d o t f a l i y
文章 编 号 : 17—752 1)0 0 1 6 6288(001— 0— 0 0
遥 感 图像 配 准 方 法 研 究 —— 综 述
苏清 贺 程 红 孙 文邦
( 国人 民解放 军 空军 航 空大 学 特 种 专业 系 ,吉 林 长 春 102) 中 302
摘 要 :图像 配 准技 术是 近 年来发 展迅 速 的 图像处理 技术 之 一,是 图像 融合、 图像 镶
中。随着 全球 遥 感 图像 数据 量 的迅 速 增 加 ,研
嵌 、超 分辨 率 图像 处理 等领 域所 不可缺 少 的关键 步骤 。对 遥 感 图像 自动 配准领 域 出现
feature matching综述
feature matching综述正文feature matching(特征匹配)是计算机视觉领域中一个重要的任务,它在图像处理、目标检测和图像拼接等应用中起着关键作用。
在图像处理中,特征匹配是指通过比较两幅图像中的特征点,找出它们之间的对应关系。
本文将综述 feature matching 的方法、技术和应用领域。
在特征匹配中,最常用的方法是基于特征描述子的匹配。
特征描述子是对图像中特征点周围区域的描述,一般采用局部图像块的统计信息。
常见的特征描述子包括SIFT(尺度不变特征变换)、SURF(加速稳健特征)和ORB(Oriented FAST and Rotated BRIEF)等。
这些特征描述子具有尺度不变性、旋转不变性和光照不变性等优点,能够在不同图像中鲁棒地进行匹配。
在特征匹配的过程中,常见的算法包括基于暴力匹配、基于FLANN (快速最近邻搜索库)的匹配和基于词袋模型的匹配等。
暴力匹配是最简单直接的方法,但计算复杂度较高,适合处理较小规模的特征集合。
FLANN库则通过构建kd树或k-means树等数据结构,实现了快速的最近邻搜索,适用于大规模的特征匹配。
词袋模型则将特征描述子通过聚类算法进行划分,将图像表示为特征的统计分布,从而实现图像之间的匹配。
feature matching 在计算机视觉领域有着广泛的应用。
其中最常见的应用是目标检测与跟踪。
通过在图像中提取关键特征并进行匹配,可以实现对目标物体的自动检测与跟踪。
此外,feature matching 还广泛应用于图像拼接、三维重建、图像检索和图像匹配等领域。
总结而言,feature matching 是一项重要的计算机视觉任务,通过比较两幅图像中的特征点,找出它们之间的对应关系。
特征描述子和匹配算法是 feature matching 的核心技术,而应用领域涵盖了目标检测与跟踪、图像拼接、三维重建等。
未来随着深度学习等技术的发展,feature matching 可能会在更多领域有所应用和拓展。
图像处理技术综述

图像处理技术综述图像处理技术是指通过对图像进行采集、处理和分析,来提取有价值的信息或改变图像的质量或特征的一系列技术。
随着计算机视觉的发展和应用的广泛,图像处理技术变得日益重要。
本文将对图像处理技术进行综述。
图像处理技术主要包括图像采集、图像增强、图像复原、图像压缩、图像分析和图像识别等多个方面。
图像采集是图像处理的第一步,是指通过摄像机或其他设备获取图像数据。
图像采集技术包括光学成像、电子成像、红外成像、超声成像等。
光学成像是最常用和最常见的图像采集方式,它通过摄像机的镜头将光信号转换为电信号。
电子成像技术则是通过电子感光元件来转换光信号为电信号。
图像增强是指通过增加图像的对比度、清晰度或改善图像的质量来提高图像的可视化效果。
图像增强技术包括灰度变换、直方图均衡化、滤波等。
灰度变换是一种对图像的亮度或对比度进行变换的方法,常用的方法有线性变换和非线性变换。
直方图均衡化是将输入图像的直方图变换为均匀直方图的过程,以提高图像的对比度。
滤波则是通过对图像进行空间域或频域滤波来增强或去除噪声。
图像复原是指通过恢复图像的原始信息或去除图像中的噪声或模糊,来提高图像的质量和可视化效果。
图像复原技术包括退化模型、滤波器设计、最小二乘估计等。
退化模型是描述图像退化过程的数学模型,常用的模型有模糊模型、噪声模型等。
滤波器设计是通过设计合适的滤波器来恢复图像的原始信息。
最小二乘估计是一种优化方法,通过最小化残差平方和来估计图像的原始信息。
第四,图像压缩是将图像数据进行编码和压缩,以减少存储和传输的数据量。
图像压缩技术包括有损压缩和无损压缩。
有损压缩是指通过去除图像中的冗余信息或者降低图像的质量,以达到压缩数据量的目的。
无损压缩则是通过编码和解码来压缩和解压缩图像数据,以保留原始图像的质量。
图像分析和图像识别是通过对图像进行特征提取和分类来实现图像的自动分析和理解。
图像分析技术包括边缘检测、特征提取、目标检测等。
边缘检测是通过检测图像中的边缘来提取图像的轮廓和形状信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于图像匹配的综述1.图像匹配的背景及定义1.1图像匹配的背景及意义图像匹配技术广泛的应用于日常生活中的诸多领域,如医疗诊断中各种医学图片的分析与识别、遥感图片识别、天气预报中的卫星云图识别、指纹识别、人脸识别等。
图像匹配技术主要指通过计算机,采用数学技术方法,对获取的图像按照特定目的进行相应的处理。
图像匹配技术是人工智能的一个重要分支和应用,随着计算机技术及人工智能技术的发展,图像识别技术逐渐成为人工智能的基础技术之一。
它涉及的技术领域相当的广泛,也越来越深入,其基本分析方法也随着数学工具的不断进步而不断发展。
现在,图像识别技术的应用范围己经不仅仅局限于视觉的范围,也体现在机器智能和数字技术等方面。
1.2图像匹配的定义所谓图像匹配是指在一幅(或一批)图像中寻找与给定目标图像相似的图像或者图像区域(子图像)的过程。
通常将已知目标图像称为模板图像,而将待搜索图像中可能与它对应的子图称作该模板的待匹配的目标图像。
图像匹配是在来自不同时间或者不同视角的同一场景的两幅或多幅图像之间寻找对应关系,该技术隶属于计算机视觉哺领域。
图像匹配的具体应用包括目标或场景识别、在多幅图像中求解3D结构、立体对应和运动跟踪等。
由于拍摄时间、拍摄角度、自然环境的变化,多种传感器的使用、传感器本身的缺陷及噪声等影响,拍摄的图像会存在灰度失真和几何畸变。
同时,图像预处理过程会引入的误差,这都是导致模板图像与待匹配的目标图像之间通常存在着一定程度上的差异。
在这种情况下,如何使匹配算法精度高、正确匹配率高、速度快和抗干扰性强成为人们关心的问题。
2.图像匹配算法的分类图像匹配算法的选取对图像匹配结果的影响很大。
实用的匹配算法不仅要求计算量小,还必须具有良好的抗噪能力和抗几何形变的能力。
通常情况下,图像匹配算法可以分为以下两大类:基于灰度相关的匹配算法、基于特征的图像匹配算法。
1) 基于灰度分布的相关匹配算法,也称为基于区域的匹配方法。
常见的基于图像灰度的匹配方法有:(1)归一化灰度相关匹配、(2)最小二乘影像匹配、和(3)序贯相似性检测法匹配等。
该类算法直接利用整幅图像的灰度信息,建立两幅图像之间的相似性度量,然后采用某种搜索方法,寻找使相似性度量值最大或最小的变换模型的参数值。
在灰度及几何畸变不大的情况下有较好的估计精度和鲁棒性,抗噪能力强。
但是它运算量大、速度慢、抗灰度及几何畸变能力较弱。
难以达到实时要求,一旦进入信息贫乏的区域,会导致误匹配率上升。
如归一化积相关匹配算法,该算法是一种典型的基于灰度相关的图像匹配算法,该算法在应用于异类图像的配准时存在一定的不足。
2) 基于特征的匹配算法。
常见的特征有物理特征、边缘、不变矩、局部熵差以及变换域特征等。
基于特征的匹配算法虽然抗次度和几何畸变能力强,但其噪声抑制能力较弱。
图像的特征提取是特征匹配算法的关键问题,它直接关系到匹配算法的好坏。
此外,为了加快图像匹配速度,人们提出将小波分析方法应用于图像匹配中。
但遗憾的是,小波分析在一维时所具有的优异特性并不能简单的推广到二维甚至高维,可分离小波只具有有限的方向,不能最优表示含线或者面奇异的高维函数,多尺度几何分析方法也就应运而生。
基于变换域的匹配方法有(1)不变矩匹配法、(2)距离变换匹配法和(3)基于小波变换的匹配等,这些匹配方法对噪声不敏感,检测结果不受光照变化影响,可以较好的处理图像之间的尺度和旋转变化。
基于模型的匹配方法在计算机视觉领域中的应用非常广泛,它可以分为刚体形状匹配和变形模板匹配两大类。
Kass提出的Snake主动轮廓模型是比较典型的自由式变形模板模型。
由于不受全局结构的限制,所以Snake模型能表示任意的形状,但是该模型对于模板的初始位置和噪声比较敏感,对于凹边缘的收敛性较差,而且容易陷入局部最小值。
2.1 基于灰度分布的相关匹配算法(1)归一化灰度相关匹配归一化积相关是一种典型的基于灰度相关的算法,具有不受比例因子误差的影响和抗白噪声干扰能力强等优点,它使用的相似性度量定义如下:R(i,j)=i,jMn=1Mm=1√∑∑[S i,j(m,n)]Mn=1Mm=12√∑∑[T(m,n)]Mn=1Mm=12--公式1[1]通过比较参考图像和输入图像在各个位置的相关系数,相关值最大的点就是最佳匹配位置。
归一化积相关匹配算法实现的步骤描述如下:1 获得带匹配图像、模版图像数据的地址、存储的高度和宽度。
2建立一个目标图像指针,并分配内存,以保存匹配完成后的图像,将带匹配图像复制到目标图像中。
3逐个扫描图像中的像素点对应的摸板子图,根据公式1求出每一个像素点位置的逐一化积相关函数值,找到图像中最大归一化函数值的出现位置,记录像素点的位置。
4将目标图像多有的像素值减半以便和原图区别,把模板图像复制到目标图像中步骤3中记录的像素点位置。
(2)最小二乘影像匹配乘法在影像匹配中的应用是20世纪80发展起来的。
德国 Ackermann教授提出了一种新的影像匹配方法--最小二乘影像匹配,由于该方法充分利用了影像窗口内的信息进行平差计算,使影像匹配可以达到1/10甚至1/100像素的高精度,即影像匹配精度可达到子像素等级。
为此,最小二乘影像匹配被称为”高精度影像匹配”,但也有人习惯于称其为”高精度影像相关”。
最小二乘法是处理各种观测数据进行测量平差的一种基本方法。
如果以不同精度多次观测一个或多个未知量,为了求定各未知量的最可靠值,各观测量必须加改正数,使其改正数的平方乘以观测值的权数的总和为最小因此称作最小二乘法。
所谓“权”就是表示观测结果质量相对可靠程度的一种权衡值。
其算法实现设计如下:首先在左影像中选择一个适当大小的区域,作为匹配的目标区。
目标区的大小按照实际情况而定,不宜过大也不宜过小。
过大就会使匹配准确度降低,也会增加运算量,使匹配效率降低; 过小会导致参与平差计算的像素点数目不足,从而会影响最小二乘法计算出的参数不能满足要求因此,合适的目标区域是非常重要的。
选择完目标区后即确定了以左影像为基准,利用变换参数对右影像进行几何变换和辐射变换,变换模型如下: g1(x1,y1)+ n1(x1,y1)= h0+h1g2(x1,y1)+ n2(x1,y1) --公式2 其中n1(x1,y1),n2(x1,y1)为偶然误差,而右影像坐标与左影像坐标间的关系为:x2=a0+a1x1+a2y1y2=b0+b1x1+b2y1 --公式3 最小二乘影像匹配算法可分为以下几个步骤来理解:第一步: 先将目标区各个像素点的坐标按公式3进行变换,如图1所示。
目标区经过变换后,在右影像中的形状和位置的情况( 下图中的变换参数取的是初始值,因此右影像中的区域形状与目标区相比,没有发生变形)。
图1选取的目标区域与经参数变换后的影像对比图第二步: 完成几何畸变改正后,图1[2]中B区域内每个像素点的坐标值一般都不会为整数,因此需要灰度重采样( 第一次几何畸变改正后,只需读取该区域中的各像素点在右影像中的灰度值即可) ,可以采用间接法重采样,即对区域中的每个像素点用双线性内插的方法计算其灰度值,将计算后得到的灰度值赋给B区域中的对应像素点,像素点的坐标值与目标区域中像素点的坐标值是对应的。
第三步: 对于重采样后的像素点用(2)式进行辐射畸变的改正,按照假设此时B区域的各像素点的灰度值估值应该与目标区域对应像素点的灰度值估值相等。
可以用下式表示:g1(x1,y1)= h0+h1g2(x1,y1) --公式4 第四步: 按照最小二乘影像匹配算法计算出畸变参数的改正值,从而计算出畸变参数。
接着计算目标区域与B区域的相关系数,由于匹配过程是一个迭代过程,因此此次计算的相关系数若大于上一次的相关系数,就可以认为匹配结束。
否则用计算得出的畸变参数重新进行计算,得到新的B区域灰度值再次计算相关系数并判断迭代是否结束。
以上过程可以认为B区域中的小区域影像是每次用畸变参数计算后的更加接近匹配区域的小区域影像代替后得到的。
随着畸变参数的不断变化,B区域中的小区域影像就无限接近于匹配区域的影像,通过计算最佳匹配点坐标,就可以得出目标区与右影像的最佳同名点的坐标。
最小二乘影像匹配算法匹配精度高,能够很方便地引入变形参数进行整体平差,从而抵消左右影像之间的几何差异和辐射差异,既考虑了辐射误差对影像匹配的影响,同时也考虑了几何畸变对影像匹配的影响。
避免了只考虑灰度的匹配方法出现的误匹配,如目标点与最终计算得出的匹配点。
虽然灰度相似性很大,但它们可能并不是同名点,因为它们的几何位置可能存在很大的差异,而最小二乘影像匹配的方法由于考虑了目标区与匹配区的几何畸变,所以能有效地避免此类问题的产生。
(3)序贯相似性检测法匹配[3]序贯相似性检测算法(SSDA )是针对传统模板匹配算法提出的一种高效的图像匹配算法.在进行每一个搜索窗口的匹配相关运算时,合理的计算间隔,检测当前所得的相关结果和SSDA 阈值T 的比较关系。
SSDA 算法是用∬|f −t |dxdy 作为匹配尺度的。
在图像f(x,y )中的点(u ,v )的非相似度m (u,v )用如下式子计算。
m (u,v )=∑∑|f (k +u −1,l +v −1)−t(k,l)|m l=1n k=1 --公式5式中,点(u ,v )表示的不是模板的中央,而是左上角位置。
如果在(u ,v )处有和模板一致的图案时,则m (u ,v )值很小,相反则m (u ,v )值很大。
特别是模板和图像完全不一致的时候,如果在模板的各像素上与图像的灰度差的绝对值一次增加下去,其和就会急剧地增大。
因此,在做加法的过程中,如果灰度差的部分和超过了某一阈值时,就认为在位置上和模板一致的图案不存在,从而转移到下一个位置上进行m (u ,v )的计算。
包括m (u ,v )在内的计算只是加减运算,而且这一计算大多数中途便停止了,因此可大幅度地缩短时间。
为了尽早的停止计算,可以随机的选择像素的位置进行灰度差的计算。
图像的序贯相似性算法实现的步骤描述如下:1获得带匹配图像、模板图像数据的地址、存储的高度和宽度。
2建立一个目标图像指针,并分配内存,以保存图像匹配后的图像,将带匹配图像复制到目标图像中。
3逐个扫描源图像中的像素点所对应的摸板子图,根据公式6求出每一个像素点位置的绝对误差值,当累加绝对误差值超过阈值时,停止累加,记录像素点的位置和累加的次数。
ε(i,j,m k,n k)=|S i,j(m k,n k)−Ŝi,j(i,j)−T(m k,n k)+T̂|--公式6 4循环步骤3,直到处理完源图像的全部像素点,累加次数最少的像素点为最佳匹配点。
5将目标图像所有像素值减半以便和原图区别,把模板图像复制到目标图像中步骤4记录的像素点位置。