基于物联网的微型四旋翼飞行器的设计
基于STM32的四旋翼无人机设计

基于STM32的四旋翼无人机设计无人机技术的发展已经逐渐成为科技领域的热门话题,而四旋翼无人机则是其中一种应用广泛的无人机类型。
它可以应用于农业、航拍、物流等各种领域,具有很大的市场潜力。
本文将介绍基于STM32的四旋翼无人机设计,讨论其硬件构架和软件系统,希望可以为无人机爱好者提供一些技术方面的参考和帮助。
一、硬件构架1. 电机和螺旋桨四旋翼无人机采用四个电机驱动四个螺旋桨来产生上升力和姿态控制。
选择合适的电机和螺旋桨对于无人机的飞行性能至关重要。
电机需要具备足够的功率和转速来推动螺旋桨产生足够的升力,并且要求响应速度快,可以方便地实现姿态控制。
螺旋桨的尺寸、材质和设计也需要仔细选择和匹配,以确保其具有良好的气动性能和结构强度。
在选用电机和螺旋桨时,还需要考虑整机的配比和平衡,以保证无人机的飞行平稳性和操控性。
2. 传感器系统无人机的传感器系统是其智能化和自主飞行的关键。
常见的传感器包括陀螺仪、加速度计、罗盘、气压计等。
这些传感器可以实现无人机的姿态感知、空间定位和高度控制等功能,从而保证无人机的飞行稳定性和精准性。
在选择传感器时,需要考虑其精度、响应速度、通信接口和适应环境等因素,以保证传感器系统可以满足无人机的实际飞行需求。
3. 控制系统基于STM32的四旋翼无人机设计通常采用飞控主板来实现飞行控制和数据处理。
飞控主板集成了微处理器、传感器接口、无线通信模块等功能,可以实现无人机的自主控制和遥控操作。
在设计控制系统时,需要考虑飞行控制算法、通信协议、数据处理速度等因素。
飞控主板还可以通过扩展接口连接其他外围设备,如GPS模块、避障传感器、摄像头等,实现更丰富的功能和应用。
二、软件系统1. 飞行控制算法飞行控制算法是基于传感器数据和飞行器状态信息,实现对电机转速和螺旋桨姿态的智能控制。
常见的飞行控制算法包括PID控制、自适应控制、模糊控制等。
这些算法可以根据无人机的动力学特性和环境变化,实现稳定的姿态控制、高效的空间定位和精准的高度控制。
基于WiFi的微型四旋翼飞行器设计
闭环 P I D控 制等 , 设 计 出一款 基 于 Wi F i 的微 型 四旋翼 飞行 器。详 细 阐述 了该 系统 构成 、 硬 件 设计 与软件 设计 。 实践表 明 , 飞 行 器机 身采 用 “ X” 型设 计 , 软件 系统 采 用四 元数 、 双 闭环 P I D控 制等 , 其 飞行稳 定性 高、 可控 性好 、 转 向更 灵 活。
De s i gn o f Wi Fi - b a s ed Mi n i Fo u r Ro t or Ai r c r a f t
FU Ch a n g. y o u’
,
C AI Ho n g— b i n ,
L I Ha n g‘
,
XI E We i 。
Ch e n g d u 6 1 0 0 5 4,C h i n a )
Ab s t r a c t :I n o r de r t o f u r t h e r i mp r o v e t h e s t a bi l i t y, s t e e in r g f l e x i bi l i t y a n d c o n t r o l l a b i l i t y o f mi n i f o ur — r o t o r a i r c r a f t
关 键词 : 四 旋翼 飞行 器 ; 微 型; Wi F i ;多种 传 感 器 ;四 元 数 ; P I D 中图分 类号 : V 2 4 9 . 1 2 2 . 2 文献标 志码 : A
文章 编号 : l 0 0 6—7 1 6 7 ( 2 0 l 6 ) l 0—0 l 1 7— 0 4
S SN 1 与
探
索
第3 5卷 第 1 0期
小型四旋翼低空无人飞行器综合设计

小型四旋翼低空无人飞行器综合设计小型四旋翼低空无人飞行器综合设计一、引言近年来,随着科技的不断发展,无人飞行器成为了航空领域的热门研究课题。
小型四旋翼低空无人飞行器因其灵活性和机动性而备受关注。
本文旨在综合设计一种小型四旋翼低空无人飞行器,并对其关键设计问题进行探讨。
二、设计目标本次设计的小型四旋翼低空无人飞行器的设计目标如下:1. 具备良好的悬停稳定性,能够在低空进行稳定的悬停飞行;2. 具备较高的操控能力,能够完成复杂的机动动作;3. 具备一定的荷载能力,能够搭载各种传感器或设备,以实现不同应用场景的需求;4. 具备良好的安全性,能够应对紧急情况并自动返航。
三、机构设计1. 旋翼设计:选择合适的旋翼叶片尺寸、扭矩和旋翼转速,以实现所需的升力和推力,并保证飞行器的稳定性和机动性。
2. 机身设计:考虑到飞行器的结构强度和重量的平衡,使用轻质且强度高的材料,以实现飞行器的结构刚度和稳定性。
3. 电机设计:根据所需的推力和转速要求,选择合适的电机,并配置相应的驱动和控制系统。
四、控制系统设计1. 姿态控制:采用惯性测量单元(IMU)获取飞行器的姿态信息,通过PID控制算法实现稳定的悬停飞行和精确的操控。
2. 导航系统:利用全球定位系统(GPS)和陀螺仪传感器获取飞行器的位置和速度信息,实现精确的导航和定位。
3. 通信系统:设计一套可靠的数据传输系统,将飞行器采集到的数据传输到地面控制器,并接收指令以实现远程操控。
4. 紧急情况处理:设计一套自主判断机制,当飞行器遇到故障或紧急情况时,能够自动触发返航程序,确保飞行器的安全。
五、能源系统设计1. 电源选择:根据需求选择合适的电池类型和容量,以提供飞行器所需的电力。
2. 能效优化:通过优化电机和电子元件的功耗,减少能源的消耗,延长飞行器的续航时间。
3. 充电系统:设计一套快速充电系统,以提高电池的充电效率和充电速度,减少充电时间。
六、飞行器性能测试设计完成后,对飞行器进行性能测试,验证其实际飞行性能和稳定性。
小型四旋翼低空无人飞行器综合设计

3、传感器应用
传感器技术在小型四旋翼低空无人飞行器中扮演着重要的角色。通过使用多种 传感器,可以实现飞行器的定位、导航、控制等功能。为了保证数据的准确性 和可靠性,需要对传感器进行定期校准和维护。
实验结果与分析
通过仿真实验,本次演示提出的混合控制方法取得了显著的实验效果。在轨迹 跟踪实验中,飞行器能够快速准确地跟踪给定的轨迹,具有良好的动态性能和 稳定性。此外,通过与单一控制方法的对比实验,本次演示提出的混合控制方 法在跟踪精度和稳定性方面均表现出明显的优势。
结论与展望
本次演示针对四旋翼无人飞行器的非线性控制问题,提出了一种基于鲁棒控制 和滑模控制的混合控制方法。通过仿真实验验证了该方法的有效性。然而,仍 然存在一些不足之处,例如对飞行器的动态特性分析不够准确、控制系统的实 时性有待提高等。
设计思路
1、总体设计
小型四旋翼低空无人飞行器主要由机身、旋翼、遥控器等部分组成。机身采用 轻量化材料制成,以减小飞行器的重量,便于携带;旋翼则由四个电机驱动, 以实现飞行器的稳定飞行;遥控器则用于控制飞行器的飞行轨迹和高度。
2、硬件设计
硬件配置是小型四旋翼低空无人飞行器的核心部分,主要包括电池、传感器、 遥控设备等。电池选用高容量、轻量化的锂离子电池,以延长飞行器的续航时 间;传感器则采用GPS、加速度计、陀螺仪等,以实现飞行器的定位、导航和 控制;遥控设备则选用2.4GHz遥控器,以实现遥控设备的无线传输。
小型四旋翼低空无人飞行器综 合设计
01 引言
03 参考内容
目录
微型四旋翼飞行器的系统设计
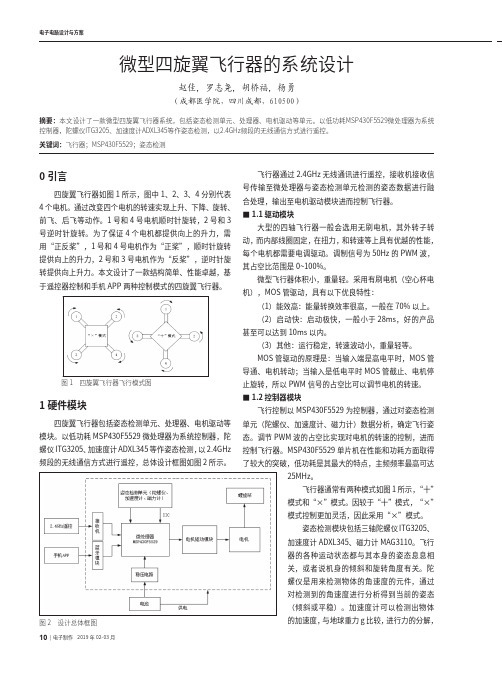
10 | 电子制作 2019年02-03月用“正反桨”,1号和4号电机作为“正桨”,顺时针旋转提供向上的升力,2号和3号电机作为“反桨”,逆时针旋转提供向上升力。
本文设计了一款结构简单、性能卓越,基于遥控器控制和手机APP 两种控制模式的四旋翼飞行器。
图1 四旋翼飞行器飞行模式图1 硬件模块四旋翼飞行器包括姿态检测单元、处理器、电机驱动等模块。
以低功耗MSP430F5529微处理器为系统控制器,陀螺仪ITG3205、加速度计ADXL345等作姿态检测,以2.4GHz 频段的无线通信方式进行遥控,总体设计框图如图2所示。
动,而内部线圈固定,在扭力,和转速等上具有优越的性能,每个电机都需要电调驱动。
调制信号为50Hz 的PWM 波,其占空比范围是0~100%。
微型飞行器体积小,重量轻。
采用有刷电机(空心杯电机),MOS 管驱动,具有以下优良特性:(1)能效高:能量转换效率很高,一般在70%以上。
(2)启动快:启动极快,一般小于28ms,好的产品甚至可以达到10ms 以内。
(3)其他:运行稳定,转速波动小,重量轻等。
MOS 管驱动的原理是:当输入端是高电平时,MOS 管导通、电机转动;当输入是低电平时MOS 管截止、电机停止旋转,所以PWM 信号的占空比可以调节电机的转速。
■1.2 控制器模块飞行控制以MSP430F5529为控制器,通过对姿态检测单元(陀螺仪、加速度计、磁力计)数据分析,确定飞行姿态。
调节PWM 波的占空比实现对电机的转速的控制,进而控制飞行器。
MSP430F5529单片机在性能和功耗方面取得了较大的突破,低功耗是其最大的特点,主频频率最高可达25MHz。
飞行器通常有两种模式如图1所示,“十”模式和“×”模式。
因较于“十”模式,“×”模式控制更加灵活,因此采用“×”模式。
姿态检测模块包括三轴陀螺仪ITG3205、加速度计ADXL345、磁力计MAG3110。
基于WIFI的智能多功能微型四旋翼飞行器设计
基于WIFI的智能多功能微型四旋翼飞行器设计摘要:本文基于WIFI无线传输技术,通过建立四旋翼飞行器的空气动力数学模型,结合实际需求分析,通过单片机总控,各功能模块有机整合,优化软硬件设计,完成最终制作调试,实现飞行器的自由巡航、悬停、降落和视频探测等功能,达到了预期设计目标。
关键词:WIFI;四旋翼;飞行器1.引言四旋翼飞行器是一种可以实现垂直起降的旋翼式无人飞行器,具有操控简单,体积小,机动性强,启动快,方便拍摄等优点,能及时地将诸如地震、矿难等特殊现场第一手资料传送回控制中心,帮助我们了解现场状况并作出正确判断[1]。
国外对旋翼式飞行器的研究较多且较深入,我国在该领域的研究起步较晚,成果相对较弱,并且侧重点有所不同,有的侧重数学建模,有的侧重自动控制与研发等等[2]。
本文于是针对自然灾害等特殊现场设计了一种基于WIFI的智能多功能四旋翼飞行器,采用独立控制的四旋翼,升力更大,同时可狭小空间内起降,还具有机械结构简单、机动灵活、操控性高及成本低等优势。
2.建立动力学模型2.1 坐标变换四旋翼飞行器的四个旋翼都高速旋转,其所受的空气动力比较复杂,要建立非常准确的空气动力学模型比较困难,为了简化四旋翼飞行器的数学模型,可忽略其弹性形变[3]。
为了相对准确的描述飞行器运动状态,建立三维数学坐标系,也叫机体坐标系。
OX轴指向地平面方向,由右手定则确定OY轴和OZ轴的方向。
用原点O表示飞行器的重心,则OX轴指向飞行器的前方,OY轴指向飞行器的右方,OZ轴指向飞行器的上方。
地面三维坐标系与机体坐标系之间存在三个欧拉角:偏航角ψ(沿Z轴方向)、滚动角φ(沿X轴方向)和俯仰角q(沿Y轴方向)。
两个坐标系之间的关系如下:,,(1)可进一步的转换矩阵得:(2)经计算可得如下坐标转换公式:(3)经过坐标转换后对其进行数学建模则相对简单。
2.2 建立数学模型该飞行器在机体坐标系下的受力可表示为[4]:(4)转移到地面坐标系上的线位移运动方程可表示为:(5)因该飞行器飞行速度相对较低,则空气阻力系数可以忽略不计。
四旋翼飞行器设计资料
四旋翼飞行器的设计查重98%四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制单元,给出了飞行控制系统的硬件设计,研究了设计中的关键技术;由于采用贴片封装和低功耗的元器件,使飞行器具有重量轻、体积小、功耗低的优点;经过多次室内试验,该硬件设计性能可靠,能满足飞行器起飞、悬停、降落等飞行模态的控制要求.一.微小型四旋翼飞行器的发展前景根据微小型四旋翼飞行器发展现状和相关高新技术发展趋势,预计它将有以下发展前景。
1 )随着相关研究进一步深入,预计在不久的将来小型四旋翼飞行器技术会逐步走向成熟与实用。
任务规划、飞行控制、无 G P S 导航、视觉和通信等子系统将进一步健全和完善,使其具有自主起降和全天候抗干扰稳定飞行能力。
它未来的主要技术指标:任务半径 5 k m,飞行高度 1 0 0 m,续航时间 1 h ,有效载荷约 5 0 0 g ,完全能够填补目前国际上在该范围内侦察手段的空白。
2 )未来的微型四旋翼飞行器将完全能够达到美国国防预研局对 M A V基本技术指标的要求。
随着低雷诺数空气动力学研究的深入,以及纳米和 M E MS 技术的发展,四旋翼 M A V必然取得理论和工程上的突破。
它将是一种有 4个旋翼的可飞行传感器芯片,是一个集成多个子系统 ( 导航与控制、动力与能源、任务与通信等子系统) 的高度复杂ME M S系统;不但能够在空中悬停和向任意方向机动飞行,还能飞临、绕过甚至是穿过目标物体。
此外,它还将拥有良好的隐身功能和信息传输能力。
3 )微小型四旋翼飞行器的编队飞行与作战应在未来的战争中,微小型四旋翼飞行器的任务之一将是对敌方进行电子干扰并攻击其核心目标。
单个微小型飞行器的有效载荷量毕竟有限,难以有效地完成任务,而编队飞行与作战不仅可以极大地提高有效载荷量,还能够增强其突防能力。
四旋翼微型飞行器设计
四旋 翼 微 型 飞 行 器 设 计
张广 玉 , 张 洪涛 李 隆 球 , 王 , 林
( 哈尔滨工业大学 机 电工程学院 , 黑龙江 哈尔滨 100 ) 50 1
摘 要 : 对 常规 无人飞行 器尺寸较 大 , 针 无法适 用 于 室 内狭 小空 间飞 行 的 问题 , 计 了一 种 四 设
旋翼微 型 飞行 器 . 建立 了微型 飞行 器的动 力 学模 型 , 绍 了组成 飞行 器的 相 关硬 件. 建 了由三轴 介 构
陀螺仪 、 三轴加 速度计 和三 轴磁 力计组 成的姿 态测 量 系统 , 出 了姿 态解算 的 具体 步 骤. 用 了互 给 使
补 滤波 器对 陀螺 测量误 差进行 矫 正 , 并给 出 了互补 滤波 器融合 系数 的确 定方法 . 用基 于欧拉 角反 采 馈 的 PD控制 器进行 姿 态控制 , 需建立 复杂 的控 制 系统 模 型. 飞行 器 最 大尺 寸 1 m, 量 2 I 无 该 5c 重 2 g 可垂 直起 降和 悬停 , 用 于狭 小空 间的侦察任 务. , 适 关键 词 : 四旋翼 ; 型飞行 器 ;姿 态测量 ; 微 互补 滤 波器 ;PD控 制 器 I
s t p T e h r w r f h e il sd s r e .T e at u e me s r me t y t m o ss f r x a y o c p e . h a d a e o e v h ce i e c b d h t t d a u e n s u t i i s e c n i so t a ilg r s o e, t a i
a tix a c e e o tr a d a ti xa g eo t r ra ila c lr mee n ra i lma n tmee .Th t t d lo t m t d i e c b d i ea l A o e at u e a g r h meho sd s r e n d t i. i i i c m— p e n a y fl ri e o c re tt e e r fg r a u e n .Themeh d o ee mi i g t e f so o f ce t l me tr t sus d t o r c h  ̄o so y o me s r me t i e t o fd tr n n h u in c e i n i o o l me a y fle s gv n Th ti d o to y t m s a PI c n r l r b s d o l ra ge e d a k, fc mp e ntr tr i ie . i e at u e c n r ls se i D o tol a e n Eu e n l s fe b c t e wi o tt e n e o c e t o lx mo e fc n r ls se t u h e d t r ae c mp e d lo o to y t m.T e ma i m ie o e v h ce i 5 c n i tr ,a d h h x mu sz ft e i l s1 e tme e s n h t e weg to i h i r ms h ih fwh c s22 g a .Th co Ai hil a ef r v ri a a e f,l n i g a d h v rn e Mir rVe c e c n p ro m etc lt k o a d n n o e g,wh c i ih
微型四旋翼无人机控制系统设计与实现

微型四旋翼无人机控制系统设计与实现微型四旋翼无人机控制系统设计与实现一、引言随着无人机技术的快速发展,微型四旋翼无人机因其体积小、机动性强、操作简单等特点而备受关注。
本文将介绍微型四旋翼无人机的控制系统设计与实现,包括硬件结构设计、飞行控制算法、遥控器与无人机的通信以及飞行状态监测等方面的内容。
二、硬件设计微型四旋翼无人机的硬件结构由四个电机和相应的螺旋桨组成,同时还包括飞控、电池、传感器和通信模块等。
电机通过螺旋桨产生推力,控制无人机的飞行方向和姿态。
飞控是无人机的大脑,通过接受传感器数据并进行计算,控制电机输出相应的信号以实现飞行任务。
虽然整个系统设计较为复杂,但由于无人机体积小,所以硬件结构相对较简单。
三、飞行控制算法微型四旋翼无人机的飞行控制算法通常包括姿态控制和高度控制两部分。
姿态控制通过测量无人机的姿态角度,并计算出所需的姿态角度偏差,然后通过PID控制器调整电机的转速,从而实现姿态的稳定控制。
在姿态控制的基础上,高度控制通过测量无人机的高度,并计算出所需的高度偏差,然后通过PID控制器控制推力大小来调整飞行高度。
四、遥控器与无人机的通信遥控器是无人机和操作员之间的重要媒介,通过遥控器操作,操作员可以实现对无人机的遥控飞行。
遥控器通过无线通信方式与无人机进行数据的传输,包括指令的发送和无人机状态的接收。
在通信方面,常用的方式有无线电通信和蓝牙通信,通过指令的传输和接收,操作员可以实时了解无人机的状态,从而对无人机进行精确的操作和控制。
五、飞行状态监测飞行状态监测是无人机飞行过程中的重要环节,通过监测无人机的各项指标来实时反馈无人机的飞行状态。
常见的监测指标包括无人机的姿态角度、高度、速度、电池电量等,这些指标可以通过传感器的测量得到。
操作员通过监测无人机的飞行状态,可以及时调整飞行控制算法参数,以确保无人机的顺利飞行。
六、结论通过本文的介绍,我们对微型四旋翼无人机的控制系统设计与实现有了初步的了解。
四旋翼飞行器控制系统硬件电路设计
四旋翼飞行器控制系统硬件电路设计首先,在硬件电路设计中,关键是选择合适的传感器。
常用的传感器包括加速度计、陀螺仪和磁力计等。
加速度计用于测量飞行器的线性加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向。
这些传感器需要与处理器进行接口连接,并能够提供准确的数据。
因此,在硬件电路设计中,需要选取高性能的传感器,同时设计稳定可靠的电路板。
其次,处理器是控制系统的核心。
处理器的选择应综合考虑性能、功耗和成本等因素。
常用的处理器有单片机和微处理器。
单片机适用于简单的控制任务,如姿态控制和飞行模式切换等。
而微处理器适用于复杂的控制任务,如路线规划和数据处理等。
在硬件电路设计中,处理器需要与传感器和电调进行接口连接,并能够高效地处理控制指令。
此外,处理器还需要具备足够的计算能力和存储空间,以便实现飞行控制算法和数据记录功能。
电调是控制电机转速的关键组件。
通常,四旋翼飞行器需要四个电调以控制四个电机的转速。
电调需要接收处理器发送的PWM信号,并将其转换为适当的电机转速。
在硬件电路设计中,电调需要具备快速响应的能力,并能够输出稳定的PWM信号。
此外,电调还需要有适当的保护机制,以避免过载和短路等故障。
最后,电机是驱动飞行器旋转的关键组件。
电机的选择应综合考虑功率和效率等因素。
常用的电机有无刷电机和有刷电机。
无刷电机具有高效率和长寿命等优点,因此在硬件电路设计中通常选择无刷电机。
电机需要与电调进行接口连接,并能够输出适当的推力。
此外,电机还需要具备足够的扭矩和转速范围,以应对不同的飞行任务。
总之,四旋翼飞行器控制系统硬件电路设计涉及多个组件的选择和接口设计等方面。
在设计过程中,需要综合考虑传感器、处理器、电调和电机等因素,以实现飞行器的控制能力和飞行稳定性。
四旋翼飞行器设计方案
四旋翼飞行器设计方案四旋翼飞行器设计方案一、项目背景为了满足近年来快递、悬停摄影、新闻采集等领域对于无人机需求的不断增加,我们设计了一款四旋翼飞行器。
该飞行器具有稳定、灵活、高效的特点,可广泛应用于各种领域。
二、设计要求1. 飞行器稳定性要求高,能够在不同天气和环境条件下稳定飞行2. 飞行器的机动性要好,能够完成各种复杂动作3. 飞行器具有自主导航、避障和悬停等功能4. 飞行器的载荷能力要较强,能够携带相机等设备进行悬停摄影和新闻采集5. 飞行器的续航能力要长,能够在一次充电之后持续飞行时间较长三、设计方案1. 结构设计:a. 飞行器采用四旋翼结构,旋翼通过电机、螺旋桨和转子连接器连接。
b. 飞行器机体由轻质材料制成,以减轻整体重量。
c. 飞行器具有折叠设计,方便携带和存放。
2. 稳定性设计:a. 飞行器配备三轴陀螺仪和加速度计,能够实时感知飞行姿态,保持平稳飞行。
b. 飞行器的旋翼具有可调节桨叶角度的功能,能够在飞行时根据需要调整旋翼的角度,提高飞行稳定性。
3. 机动性设计:a. 飞行器的旋翼速度可调节,能够实现前进、后退、上升、下降、转弯等各种动作。
b. 飞行器配备高精度数传遥控系统,能够精确控制飞行器的动作,保证飞行器的机动性。
4. 功能设计:a. 飞行器配备GPS导航系统,能够实现自主导航功能,能够根据预设的路径自动飞行。
b. 飞行器配备避障传感器,能够感知前方障碍物,自动避开,确保安全飞行。
c. 飞行器具有悬停功能,能够在空中静止悬停,保持稳定飞行。
5. 载荷能力设计:a. 飞行器结构坚固,能够承载相机等设备进行悬停摄影和新闻采集。
b. 飞行器具有电池可更换设计,能够根据需要调整电池数量,提高载荷能力。
6. 续航能力设计:a. 飞行器采用高效能源管理系统,能够在一次充电之后持续飞行时间较长。
b. 飞行器具有低能耗设计,能够减少能源消耗,延长飞行时间。
四、总结通过以上设计方案,我们设计出了一款稳定、灵活、高效的四旋翼飞行器。
一种基于STM32 的微型四旋翼飞行器硬件设计方案
直径,将整体硬质合金刀具的切削能力发挥极致。
再结合MachineDNA 反馈回来的机床参数,对程序进行优化处理。
因此,使用Vortex 旋风铣与MachineDNA系统编制出的NC 程序,可将CAM 软件、刀具和机床三者的潜能最大限度地释放,使加工效率与质量得到较大的提升,解决传统不锈钢深腔加工所没法实现的技术瓶颈。
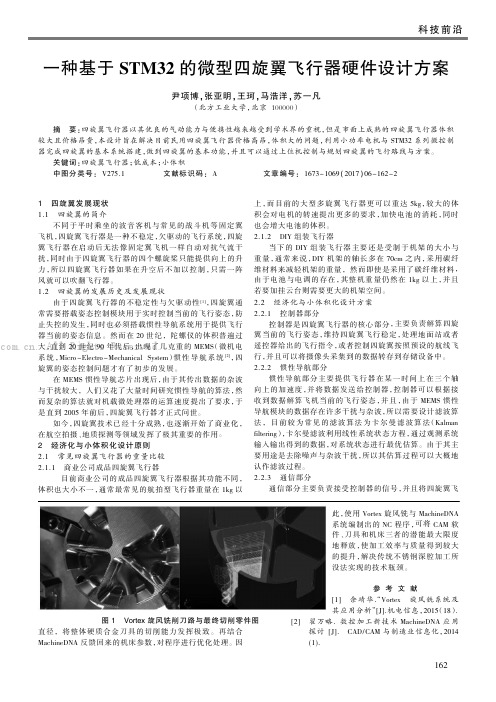
参考文献[1]余靖华.“Vortex 旋风铣系统及其应用分析”[J].机电信息,2015(18).[2]翟万略.数控加工新技术MachineDNA 应用探讨[J].CAD/CAM 与制造业信息化,2014(1).图1Vortex 旋风铣削刀路与最终切削零件图1四旋翼发展现状1.1四旋翼的简介不同于平时乘坐的波音客机与常见的战斗机等固定翼飞机,四旋翼飞行器是一种不稳定,欠驱动的飞行系统,四旋翼飞行器在启动后无法像固定翼飞机一样自动对抗气流干扰,同时由于四旋翼飞行器的四个螺旋桨只能提供向上的升力,所以四旋翼飞行器如果在升空后不加以控制,只需一阵风就可以吹翻飞行器。
1.2四旋翼的发展历史及发展现状由于四旋翼飞行器的不稳定性与欠驱动性[1],四旋翼通常需要搭载姿态控制模块用于实时控制当前的飞行姿态,防止失控的发生,同时也必须搭载惯性导航系统用于提供飞行器当前的姿态信息。
然而在20世纪,陀螺仪的体积普遍过大,直到20世纪90年代后,出现了几克重的MEMS (微机电系统,Micro -Electro -Mechanical System )惯性导航系统[2],四旋翼的姿态控制问题才有了初步的发展。
在MEMS 惯性导航芯片出现后,由于其传出数据的杂波与干扰较大,人们又花了大量时间研究惯性导航的算法,然而复杂的算法就对机载微处理器的运算速度提出了要求,于是直到2005年前后,四旋翼飞行器才正式问世。
如今,四旋翼技术已经十分成熟,也逐渐开始了商业化,在航空拍摄、地质探测等领域发挥了极其重要的作用。
2经济化与小体积化设计原则2.1常见四旋翼飞行器的重量比较2.1.1商业公司成品四旋翼飞行器目前商业公司的成品四旋翼飞行器根据其功能不同,体积也大小不一,通常最常见的航拍型飞行器重量在1kg 以上,而目前的大型多旋翼飞行器更可以重达5kg ,较大的体积会对电机的转速提出更多的要求,加快电池的消耗,同时也会增大电池的体积。
小型四旋翼无人机组机方案设计

一、小型四旋翼无人机总体架构典型的小型四旋翼无人机,一般由机械部分(机架),动力部分(包括电机、电子调速器、电调连接板、桨叶、电池),电子部分(包括飞控板、通信模块、遥控器接收机、PPM编码板)组成。
(一)机械部分机架考虑到编队飞行对实验室空间的要求,希望机架能够尽量的小。
根据与蔡国伟老师对电机与桨叶(后文提到)的搭配进行讨论后,决定将机架的大小设定为轴距255mm,边距180mm(由6寸桨的大小决定)。
1,底板 2,中间机架板 3,顶板整个机体由底板、中间机架板、顶板连接而成(通过尼龙螺柱和螺丝);底板安置电池、xbee模块、遥控器接收机、电调连接板,中间机架板安置4个电调、pixhawk飞控板,顶板用于安置定位系统标记点(同时起到保护、隐藏pixhawk 飞控板及走线的作用);为便于安装,所有开孔、镂空均根据拟选器件匹配设计;拟采用碳2mm厚3K纤维板加工。
另设计四个保护罩如下(可用于避免桨叶受损或伤人):4,保护罩(二)动力部分(1)电机一般而言,小型四旋翼无人机(轴距250mm左右)选用KV2000左右(配5-6寸桨)的电机。
经过对比讨论后,拟选用飓风D2206 KV1900无刷直流电机(配6寸桨)。
之所以选用这款电机是因为这款电机能够提供较大的拉力,同时该电机的工作电流处在一个比较小的区间,单个电机重量仅为27.5g。
飓风D2206 KV1900参数表飓风D2206 KV1900实物图(2)电子调速器电子调速器用于驱动无刷直流电机,比较重要的参数是工作电流,刷新频率,重量。
一般而言,市面上可售的大部分电子调速器的刷新频率都大于400hz,符合要求。
根据上文所选电机的工作电流,综合考虑重量要求,与蔡国伟老师沟通后,拟选用好盈XRotor-10A电子调速器。
好盈XRotor系列电子调速器参数表好盈XRotor-10A电子调速器实物图(3)电调连接板电调连接板,其本质为一块电源配电板,用于简化电池与电调、电调与飞控之间的电气连接,同时可以避免导线拆装时的反复焊接。
微型四旋翼飞行控制器设计
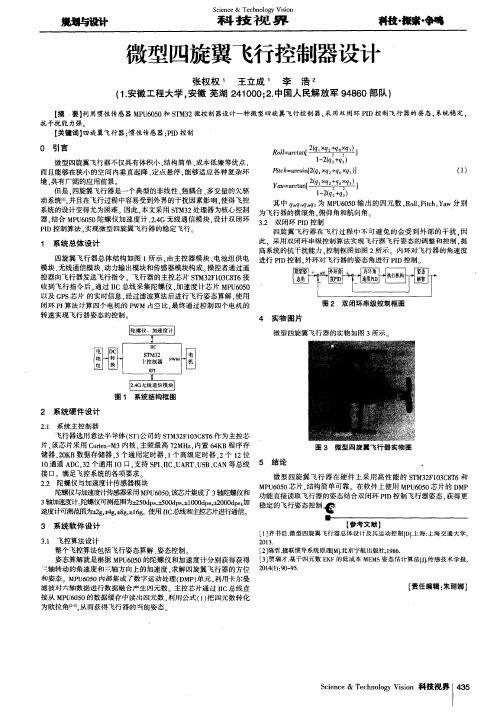
飞行器选用意法半 导体 ( s T ) 公 司的 s T M3 2 F l O 3 c 8 T 6作 为主控 芯 片. 该芯 片采用 C o r t e x — M 3内核 . 主频最高 7 2 M H z . 内置 6 4 K B程序存 储器 , 2 0 K B数据存储 器, 3 个通用 定时器 , 1 个 高级定时器 . 2 个 l 2 位 1 0 通道 A D C , 3 2 个通用 I O口, 支持 S P I 、 I I C 、 U A R T 、 U S B 、 C A N等总线 接口 满足飞控系统的各项要求 2 . 2 陀螺仪与加速度计传感器模块 陀螺仪与加速度计传感器采用M P U 6 0 5 0 . 该芯片集成了 3 轴陀螺仪和 3 轴加速度计。 陀螺仪可测范围为± 2 5 0 d p s ,  ̄ 5 0 0 d p s ,  ̄ 1 0 O O d p s ,  ̄ 2 0 0 0 d p s ; 加 速度计可测范围为± 2 g ,  ̄ 4 g , ± 8 g ,  ̄ 1 6 g 。使用 I I C总线和主控芯片进行通信。
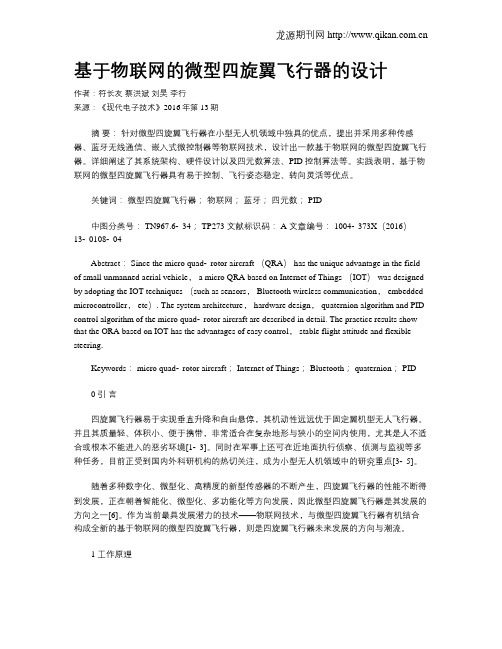
图 3 微 型 四 旋 翼飞 行 器 实 物 图
5 结论 微 型 四旋 翼 飞行器 在硬件 上采 用高性 能 的 S T M 3 2 F 1 0 3 C 8 T 6和 M P U 6 0 5 0 芯 片, 结构简单可靠 。在软件 上使用 MP U 6 0 5 0 芯片的 D M P 功能直接读取 飞行器 的姿态结合双闭环 P I D控制 飞行器 姿态 . 获得 更 稳定的飞行姿 态控制 【 参考文献 】
S c i e n c e& Te c h n o l o 视 界
科技・ 探索・ 争鸣
微型四旋翼飞行控制器设计
张权 权 王立成 , 李 浩2 ( 1 . 安徽 工程 大学 , 安徽 芜 湖 2 4 1 0 0 0 ; 2 . 中国 人 民解 放 军 9 4 8 6 0部 队 )
基于物联网的微型四旋翼飞行器的设计
基于物联网的微型四旋翼飞行器的设计作者:符长友蔡洪斌刘昊李行来源:《现代电子技术》2016年第13期摘要:针对微型四旋翼飞行器在小型无人机领域中独具的优点,提出并采用多种传感器、蓝牙无线通信、嵌入式微控制器等物联网技术,设计出一款基于物联网的微型四旋翼飞行器。
详细阐述了其系统架构、硬件设计以及四元数算法、PID控制算法等。
实践表明,基于物联网的微型四旋翼飞行器具有易于控制、飞行姿态稳定、转向灵活等优点。
关键词:微型四旋翼飞行器;物联网;蓝牙;四元数; PID中图分类号: TN967.6⁃34; TP273 文献标识码: A 文章编号: 1004⁃373X(2016)13⁃0108⁃04Abstract: Since the micro quad⁃rotor aircraft (QRA) has the unique advantage in the field of small unmanned aerial vehicle, a micro QRA based on Internet of Things (IOT) was designed by adopting the IOT techniques (such as sensors, Bluetooth wireless communication, embedded microcontroller, etc). The system architecture, hardware design, quaternion algorithm and PID control algorithm of the micro quad⁃rotor aircraft are described in detail. The practice results show that the ORA based on IOT has the advantages of easy control, stable flight attitude and flexible steering.Keywords: micro quad⁃rotor aircraft; Internet of Things; Bluetooth; quaternion; PID0 引言四旋翼飞行器易于实现垂直升降和自由悬停,其机动性远远优于固定翼机型无人飞行器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数, 其运算量大。为了避免计算三角函数, 采用姿态四 元数控制。与欧拉角控制一样, 先求姿态差, 再把姿态 差输入到 PID 控制器来控制油门变化量。当前姿态记 转, 即姿态差, 记为 d, 则有:
c ⊗ d = t ⇔ c-1 ⊗ d = c-1 ⊗ t ⇔ d = c-1 ⊗ t
108 doi: 10.16652/j.issn.1004⁃37 39 卷第 13 期
现代电子技术 Modern Electronics Technique
Jul. 2016 Vol. 39 No. 13
基于物联网的微型四旋翼飞行器的设计
符长友 1,蔡洪斌 2,刘
static long SumNick=0, SumRoll=0; static long IntegralFehlerNick=0; static long IntegralFehlerRoll=0; delay_ausschalten=0; static unsigned int RcLostTimer; static unsigned int modell_fliegt=0; …… }
的 ARM@CortexTM_M3 32 ⁃ bit 的 RISC 内 核 , 其频率为 设。其中, 包含 3 个通用 16 b 定时器、 2 个 12 b ADC 和 1 个 PWM 定 时 器 , 还包含标准、 先进的通信接口: 1个 和 1 个 USB 接口 , 其电路设计如图 3 所示。
[8]
3
3.1
硬件设计
系统主控制器 系统主控制器采用 STM32F103, 该芯片采用高性能
3.3
磁力计传感器 磁 力 计 传 感 器 采 用 HMC5883, 该器件是一款表面
贴装的高集成模块, 并带有数字接口的弱磁传感器芯 片。包括最先进的高分辨率磁阻传感器, 并附带霍尼韦 尔专利的集成电路包括自动消磁驱动器、 放大器、 偏差 校准, 能 使 罗 盘 精 度 控 制 在 1°~2° 的 12 b ADC , 能在 ±8 高斯的磁场中实现 5 毫高斯分辨率 [10]。其采用 I2C 总 所示。 3.4
6⁃7] 器朝着期望的方向飞行 [1, 。
。
随着多种数字化、 微型化、 高精度的新型传感器的 不断产生, 四旋翼飞行器的性能不断得到发展, 正在朝 着智能化、 微型化、 多功能化等方向发展, 因此微型四旋 翼飞行器是其发展的方向之一 。作为当前最具发展潜
收稿日期: 2015⁃10⁃16
[6]
基金项目: 国 家 863 计 划 项 目 (2015AA016010) ; 四川省院士
2
系统架构
基于物联网的微型四旋翼飞行器由微型四旋翼飞
省自贡市科技创新苗子工程项目 (2015CXM07) ;
行器与智能飞行控制系统 (一款安装在智能手机上的管
第 13 期
符长友, 等: 基于物联网的微型四旋翼飞行器的设计
109
理软件) 构成, 二者之间通过蓝牙 (BlueTooth) 进行数据
通信, 如图 1 所示。智能飞行控制系统把智能手机既作 遥控器, 也作接收器。用户通过操作智能飞行控制系统 来管理、 控制微型四旋翼飞行器的飞行: 垂直上升、 垂直 下降、 向左移动、 向右移动、 向前移动、 向后移动、 空中悬 停、 空中滚转、 紧急停机等, 并且微型四旋翼飞行器的飞 行姿态及相关数据同时也会实时显示在智能飞行控制 系统上。微型四旋翼飞行器通过蓝牙无线方式接收智 能飞行控制系统发来的控制指令控制四个直流电机, 以 实现用户所需的飞行姿态。
Abstract:Since the micro quad⁃rotor aircraft (QRA) has the unique advantage in the field of small unmanned aerial vehi⁃
wireless communication,embedded microcontroller,etc) . The system architecture,hardware design,quaternion algorithm and IOT has the advantages of easy control,stable flight attitude and flexible steering.
FU Changyou1,CAI Hongbin2,LIU Hao1,LI Xing1
cle,a micro QRA based on Internet of Things (IOT) was designed by adopting the IOT techniques (such as sensors,Bluetooth
为 C, 目 标 姿 态 记 为 t, 从当前姿态转到目标姿态的旋 (1)
假定姿态差为小量, 三角函数可以用小角替换。根
据四元数表示姿态的意义, 由式 (2) 可知 x d , y d , z d 为各轴 得到控制油门变化量。由于是 PID 控制器, 式 (4) 中的 力矩系数可以忽略掉。
ìw q = cos ( θ 2 ) ï ïx q = x ω ⋅ sin ( θ 2 ) í ïy q = y ω ⋅ sin ( θ 2 ) ï z = z ⋅ sin ( θ 2 ) î q ω = K P ⋅ z d, n - K d ⋅( z d, n - z d, n - 1) ìz m ï = K P ⋅ y d, n - K d ⋅( y d, n - y d, n - 1) íy m ï x = K P ⋅ x d, n - K d ⋅( x d, n - x d, n - 1) î m
(专 家) 工作站基金项目 (2014YSGZZ01) ; 企业信 息化与物联网测控技术四川省高校重点实验室 项 目(2013WZY03); 2015 年 四 川 省 大 学 生 创 新 创业训练计划项目 (201510622004) ; 2015 年 四 川 物联网工程专业课程体系的改革与实践项目
文章编号:1004⁃373X (2016) 13⁃0108⁃04
Design of micro quad⁃rotor aircraft based on IOT
2. School of Computer Science and Engineering,University of Electronic Science and Technology of China,Chengdu 610054,China) (1. School of Computer Science,Sichuan University of Science & Engineering,Zigong 643000,China;
72 MHz, 内置高速存储器、 增 强 型 I/O 口 和 丰 富 的 外 SPI 接口、 2 个 I2C 接口、 3 个 USART 接口、 1 个 CAN 接口 3.2 陀螺仪与加速度计传感器 陀螺仪与加速度计采用 MPU6050。该芯片集成了
线与外部主控制器进行数据通信。其电路原理如图 5 蓝牙通信模块 蓝牙通信采用 BF4030 无线模块, 其支持蓝牙 4.0 标
PID control algorithm of the micro quad⁃rotor aircraft are described in detail. The practice results show that the ORA based on Keywords:micro quad⁃rotor aircraft;Internet of Things;Bluetooth;quaternion;PID
3 轴 MEMS 陀螺仪、 3 轴 MEMS 加速度计以及 1 个可扩展
的 数 字 运 动 处 理 器(Digital Motion Processor, DMP)。
准协议的双模蓝牙模组, 也支持 BT3.0 Classic 模式以及 BT4.0 BLE 模式。该模块遵循 BT4.0 蓝牙规范, 具有工
[3⁃5]
1
工作原理
微型四旋翼飞行器有四个交叉, 且在同一高度的旋
翼以相对的两个旋翼为一组进行配置。这两组旋翼以 相反的方向旋转, 通过改变电机的输出功率来改变转子 的转速, 以达到改变升力并产生运动的目的。同步减少 或增加四个旋翼的转速就能产生垂直运动, 即垂直下降 或垂直上升。以相反的方向改变一组旋翼的转速, 就能 使俯仰角改变并同时产生相应的横向运动; 以相反的方 向改变另一组旋翼的转速能使滚动角改变并同时产生 侧向运动; 每组旋翼的反向力矩差产生偏航角转动。通 过改变上述三个角的角度, 就可以控制微型四旋翼飞行
图1
基于物联网的微型四旋翼飞行器系统功能图
3 轴加速度计、 3 轴磁力计传感器、 蓝牙无线通信模块、 USB 接口稳压电源、 空心杯电机、 状态显示 LED 灯等组 成, 其系统功能如图 2 所示。
微型四旋翼飞行器由系统主控制器、 3 轴陀螺仪、
图3
STM32F103 电路设计图
图2
微型四旋翼飞行器系统功能图 图4 MPU6050 电路设计图
110
现代电子技术
é1 ê1 ΔT = ê ê-1 ë-1 -1 1 1 -1
2016 年第 39 卷
业级设计、 传输距离远、 数据稳定等特点, 支持标准 BT3.0 + EDR 、 标 准 BT4.0 BLE 协 议 、 SPP 协 议 , 也支持 I C, SPI, UART 通信接口 。其电路设计如图 6 所示。
飞行控制核心程序 飞行控制核心程序部分代码如下:
void MotorRegler (void) { int motor, pd_erg, h, tmp_int; int GierMischant, GasMischant; //电机数值, PI 计数值 //偏航数值, 油门数值 //俯仰、 滚转积分 //俯仰误差积分 //滚转误差积分 //延迟接通, 延迟关闭 //飞行时间 //俯仰均衡