自主紧急制动系统避撞策略的研究_李霖
《基于制动和转向的智能车避撞控制研究》范文
《基于制动和转向的智能车避撞控制研究》篇一一、引言随着智能交通系统的快速发展,自动驾驶汽车逐渐成为未来交通的重要趋势。
避撞系统作为自动驾驶汽车的核心技术之一,对于提高行车安全性和减少交通事故具有重要意义。
本文将重点研究基于制动和转向的智能车避撞控制技术,探讨其原理、方法及实际应用。
二、智能车避撞控制技术概述智能车避撞控制技术主要通过传感器、控制器和执行器等设备实现车辆的自主避障和避撞。
其中,制动和转向是两种主要的避撞手段。
制动系统通过调整车辆制动力度,使车辆减速或停车,以避免碰撞;转向系统则通过改变车辆的行驶方向,使车辆绕过障碍物。
这两种手段在智能车避撞控制中相互配合,共同保障行车安全。
三、制动和转向的避撞控制原理1. 制动避撞控制原理制动避撞控制主要通过传感器检测车辆与障碍物之间的距离,当距离小于安全阈值时,控制系统会发出制动指令,调整制动力度,使车辆减速或停车,以避免碰撞。
此外,制动系统还可以根据障碍物的速度、大小和类型等信息,进行智能化的制动策略调整,提高避撞效果。
2. 转向避撞控制原理转向避撞控制主要通过传感器检测车辆周围的障碍物信息,通过算法计算出最佳的转向路径和转向角度,使车辆绕过障碍物。
转向避撞控制需要考虑车辆的动力学特性、道路条件、车速等因素,以确保转向过程的稳定性和安全性。
四、智能车避撞控制的实现方法1. 传感器技术传感器是智能车避撞控制的核心设备之一,主要用来检测车辆周围的障碍物信息。
常用的传感器包括雷达、激光雷达、摄像头等。
这些传感器可以提供障碍物的位置、速度、大小等信息,为控制系统提供决策依据。
2. 控制器设计控制器是智能车避撞控制的核心部分,主要负责接收传感器的信息,根据一定的算法计算出最佳的避撞策略,并发出指令给执行器。
控制器设计需要考虑多种因素,如传感器的精度、执行器的性能、车辆的动力学特性等。
3. 执行器技术执行器是智能车避撞控制的最终环节,主要负责执行控制器的指令。
《基于制动和转向的智能车避撞控制研究》范文
《基于制动和转向的智能车避撞控制研究》篇一一、引言随着科技的飞速发展,智能车辆技术已成为当今研究的热点。
其中,避撞控制作为智能车辆安全行驶的关键技术之一,其研究具有重要的理论意义和实际应用价值。
本文将针对基于制动和转向的智能车避撞控制进行研究,旨在提高智能车辆的行驶安全性和稳定性。
二、智能车避撞系统概述智能车避撞系统是一种集成了多种传感器、控制器和执行器的复杂系统。
其中,传感器用于获取车辆周围的环境信息,控制器根据获取的信息进行决策,执行器则负责实施控制动作。
在避撞控制中,制动和转向是两种主要的执行动作。
三、制动避撞控制研究制动避撞控制是智能车避撞控制的重要组成部分。
在紧急情况下,通过合理控制制动系统,使车辆迅速减速,以避免碰撞事故的发生。
3.1 制动系统模型制动系统模型是研究制动避撞控制的基础。
该模型应包括制动器的结构、工作原理以及制动力的产生和传递过程。
通过建立精确的制动系统模型,可以为后续的避撞控制研究提供有力的支持。
3.2 制动策略研究制动策略是指导制动避撞控制的关键。
根据不同的环境信息和车辆状态,制定合理的制动策略,使车辆在保证安全的前提下,尽可能地减小制动距离。
目前,常见的制动策略包括预见性制动、紧急制动等。
四、转向避撞控制研究转向避撞控制是另一种重要的避撞控制方式。
通过控制车辆的转向系统,使车辆在避免碰撞的同时,保持稳定的行驶轨迹。
4.1 转向系统模型转向系统模型是研究转向避撞控制的基础。
该模型应包括转向器的结构、工作原理以及转向力的产生和传递过程。
通过建立精确的转向系统模型,可以更好地理解转向避撞控制的原理和实现方法。
4.2 转向策略研究转向策略是指导转向避撞控制的关键。
根据环境信息和车辆状态,制定合理的转向策略,使车辆在避免碰撞的同时,保持稳定的行驶状态。
常见的转向策略包括路径规划、车道保持等。
五、制动与转向的协调控制研究在实际应用中,制动和转向往往需要协调配合,以实现最佳的避撞效果。
一种车辆自主紧急制动控制系统和控制方法[发明专利]
![一种车辆自主紧急制动控制系统和控制方法[发明专利]](https://img.taocdn.com/s3/m/ee7e9602998fcc22bdd10d41.png)
专利名称:一种车辆自主紧急制动控制系统和控制方法专利类型:发明专利
发明人:俄文娟,丁延超,郑四发,许述财,王枫
申请号:CN202011086241.4
申请日:20201012
公开号:CN112298132A
公开日:
20210202
专利内容由知识产权出版社提供
摘要:本发明涉及一种车辆自主紧急制动控制系统和控制方法。
车辆自主紧急制动控制系统包括车载感知设备、前方障碍物信息处理单元、路面状态信息处理单元、决策控制单元和制动执行单元。
车载感知设备采集第一类参数和第二类参数;前方障碍物信息处理单元基于第一类参数获得障碍物信息;路面状态信息处理单元基于第二类参数获得路面状态信息;决策控制单元根据障碍物信息、路面状态信息和车辆的制动踏板信息做出制动决策;制动执行单元根据制动决策进行预警或控制车辆的制动系统执行制动动作。
车辆自主紧急制动控制方法由该车辆自主紧急制动控制系统执行。
本发明综合考虑路面状态信息和障碍物信息实现车辆制动的控制,可有效地避免车辆与障碍物发生碰撞。
申请人:清华大学苏州汽车研究院(相城)
地址:215134 江苏省苏州市相城区渭塘镇爱格豪路19号中汽零大厦
国籍:CN
代理机构:苏州创元专利商标事务所有限公司
代理人:孙仿卫
更多信息请下载全文后查看。
汽车主动安全系统中的预碰撞制动优化研究
汽车主动安全系统中的预碰撞制动优化研究随着汽车行业的快速发展,汽车安全已成为消费者购买车辆时最重要的考虑因素之一。
作为汽车主动安全系统的核心组成部分,预碰撞制动系统在避免和减轻交通事故中的伤害方面起着关键作用。
为了提高预碰撞制动系统的效率和可靠性,研究人员不断努力进行优化研究。
预碰撞制动系统是一种自动化的紧急制动系统,通过利用传感器和计算机控制,检测到即将发生碰撞的危险,并对车辆进行紧急制动,以减少碰撞的严重程度或完全避免碰撞。
为了使预碰撞制动系统优化,以下几个方面需进行研究。
首先,研究人员需要优化预碰撞制动系统的传感器技术。
传感器是预碰撞制动系统的核心组成部分,负责探测车辆前方的障碍物或其他车辆。
为了准确地检测并判断潜在的碰撞风险,研究人员需要开发更高精度和更快速的传感器技术。
例如,利用雷达、摄像头和激光雷达等先进传感器,可以提高系统对障碍物形状和距离的识别能力,从而更准确地预测和判断可能发生碰撞的危险。
其次,预碰撞制动系统的控制算法也需要进行优化研究。
控制算法决定了系统对碰撞风险的识别和响应方式。
目前,常用的控制算法包括刹车压力和刹车时间的调整。
然而,这些算法并不能适应所有交通场景和驾驶行为。
因此,研究人员需要开发更加智能和自适应的控制算法,在不同情况下动态调整刹车压力和刹车时间,以确保系统能够及时、精确地响应潜在的碰撞风险。
此外,预碰撞制动系统的性能评估也是研究人员需要关注的一个重要方面。
性能评估可以帮助研究人员了解系统的准确性、可靠性和实用性。
通过对系统进行模拟实验和真实道路试验,可以评估预碰撞制动系统在各种交通场景和不同驾驶行为下的性能表现。
通过与现有标准和规范进行对比,可以确定系统的优点和缺点,并提出改进建议。
最后,预碰撞制动系统的人机交互界面也需要研究人员的关注。
人机交互界面可以帮助驾驶员更好地理解系统的功能和工作原理,并与系统进行有效的交互。
通过设计直观、简单并且易于理解的用户界面,驾驶员可以更好地感知来自预碰撞制动系统的警告和提示,并做出正确决策。
《基于制动和转向的智能车避撞控制研究》范文

本文研究了基于制动和转向的智能车避撞控制技术,提出了一种有效的避撞控制策略。该策略通过融合传感器数据、路径规划和决策算法等技术,实现对车辆周围环境的实时监测和识别,并通过制动和转向等手段调整车辆状态,以避免碰撞事故的发生。实验结果表明,该策略具有较高的有效性和可靠性,具有重要的应用价值。
2.路径规划:根据传感器数据和车辆当前状态,利用路径规划算法计算最优行驶路径。
3.决策算法:根据路径规划和传感器数据,运用决策算法判断是否需要采取制动或转向等措施来避免碰撞。
4.制动和转向控制:根据决策结果,通过制动和转向控制系统调整车辆状态,以实现避撞目的。
五、实验与结果分析
为了验证本文提出的基于制动和转向的智能车避撞控制策略的有效性,我们进行了实车实验和仿真实验。实验结果表明,该策略可以实时监测碰撞事故的发生。此外,该策略还可以根据不同路况和车况进行自适应调整,提高智能车辆的稳定性和安全性。
未来研究方向包括进一步提高传感器数据的准确性和可靠性,优化路径规划和决策算法,以及研究更加智能的避撞控制策略,以适应更加复杂的交通环境和更加严格的安全要求。此外,还可以将该技术与其他智能驾驶技术相结合,如自动驾驶、车联网等,以提高智能车辆的整体性能和安全性。
三、相关技术研究综述
在智能车避撞控制领域,制动和转向控制技术是两个重要的研究方向。制动控制技术主要关注如何通过调整车辆制动力来控制车速和车辆状态,以避免碰撞。转向控制技术则主要关注如何通过调整车辆转向角度来改变车辆行驶轨迹,以避开障碍物。此外,传感器技术、路径规划算法、决策算法等也是智能车避撞控制领域的重要研究方向。
四、基于制动和转向的避撞控制策略研究
本文提出了一种基于制动和转向的智能车避撞控制策略。该策略通过融合传感器数据、路径规划和决策算法等技术,实现对车辆周围环境的实时监测和识别。当系统检测到潜在碰撞风险时,会通过制动和转向等手段调整车辆状态,以避免碰撞事故的发生。
《基于制动和转向的智能车避撞控制研究》

《基于制动和转向的智能车避撞控制研究》一、引言随着智能交通系统的快速发展,自动驾驶汽车技术正日益受到全球关注。
作为智能车关键技术之一,避撞控制的研究尤为关键。
基于制动和转向的智能车避撞控制系统通过传感器、数据处理以及先进的算法实现对周围环境的感知和响应,从而确保车辆在行驶过程中的安全性。
本文将重点研究基于制动和转向的智能车避撞控制技术,探讨其原理、方法及实际应用。
二、智能车避撞控制系统的基本原理智能车避撞控制系统主要基于传感器技术、数据处理以及控制算法实现。
系统通过雷达、激光雷达、摄像头等传感器对周围环境进行实时感知,获取车辆与周围物体的距离、速度等信息。
然后,通过数据处理算法对这些信息进行加工、分析和处理,判断是否存在碰撞风险。
一旦系统判断出存在碰撞风险,将启动避撞控制策略,通过制动或转向等方式,避免或减轻碰撞。
三、制动和转向在避撞控制中的作用在智能车避撞控制系统中,制动和转向是两种主要的避撞方式。
当系统检测到前方有障碍物且距离较近时,为了避免碰撞,通常会优先采用制动的方式。
通过控制车辆的刹车系统,使车辆减速或停车,从而避免碰撞。
然而,在某些情况下,如障碍物突然出现或道路条件复杂时,仅靠制动可能无法完全避免碰撞。
此时,转向技术将发挥重要作用。
通过控制车辆的转向系统,使车辆在保持稳定的前提下进行转向,从而避开障碍物。
四、避撞控制算法研究避撞控制算法是智能车避撞控制系统的核心。
目前,常用的避撞控制算法包括基于规则的算法、基于优化的算法和基于学习的算法等。
基于规则的算法主要通过设定一系列规则来实现避撞控制,如设定安全距离、安全速度等。
基于优化的算法则通过优化控制参数,使车辆在避障过程中的能耗、时间等达到最优。
而基于学习的算法则通过机器学习等技术,使车辆在不断学习的过程中提高避障能力。
五、实际应用及挑战智能车避撞控制系统在实际应用中已取得显著成效。
通过实车测试和模拟实验,验证了其在实际道路环境中的有效性和可靠性。
汽车紧急制动防误踩油门智能系统的研究
汽车紧急制动防误踩油门智能系统的研究摘要:随着汽车制造技术的提高和智能化的快速发展,人们对汽车安全性能的要求也越来越高。
尤其是在紧急情况下,及时而准确地采取措施成为最重要的因素之一。
本文将重点研究汽车紧急制动防误踩油门智能系统,通过分析目前紧急制动技术的现状和问题,提出了一种基于智能算法的系统设计方案。
该系统通过传感器采集车辆的各种参数,并经过处理和分析得出相应的控制信号,从而在紧急情况下自动启动制动系统,防止误踩油门导致事故的发生。
实验结果表明,该系统能够有效地提高车辆的安全性能,减少事故发生的可能性。
1. 引言随着汽车数量的不断增加和道路交通的不断加剧,汽车安全性能的重要性日益凸显。
紧急制动是一种常见的安全措施,可以在紧急情况下迅速停车,避免事故的发生。
由于人们在紧急情况下的反应时间和判断能力有限,误踩油门导致事故的情况时有发生。
研究一种能够自动启动紧急制动的智能系统具有重要的意义。
2. 现有技术的问题目前,已有一些紧急制动技术被广泛应用于汽车上,如ABS(防抱死制动系统)和EBD (电子制动力分配系统)。
这些技术依赖于驾驶员的操作,当驾驶员没有正确使用或误操作时,仍然无法达到预期的效果。
特别是在紧急情况下,驾驶员可能反应不及时或判断错误,这对行车安全构成了严重的威胁。
3. 系统设计方案为了解决以上问题,本文提出了一种基于智能算法的汽车紧急制动防误踩油门智能系统。
该系统主要由传感器、处理器和控制单元组成。
传感器用于采集车辆的各种参数,如车速、加速度、刹车踏板的状态等。
传感器采集到的数据经过处理器的处理和分析,得出相应的控制信号。
控制单元则根据这些信号自动启动制动系统,从而防止误踩油门导致事故的发生。
4. 系统的实现与测试为了验证系统的有效性,我们进行了一系列的实验。
我们使用模拟器模拟了不同的紧急情况,通过人工操作进行对比测试。
然后,我们使用真实的汽车进行了路试,对系统进行了进一步的验证。
实验结果表明,该系统能够在紧急情况下及时而准确地启动制动系统,有效地防止误踩油门导致事故的发生。
驾驶员制动和转向避撞极限
驾驶员制动和转向避撞极限
李霖;朱西产;陈海林
【期刊名称】《同济大学学报(自然科学版)》
【年(卷),期】2016(044)011
【摘要】结合驾驶员避撞行为特征和车辆动力学特性,对驾驶员的制动和转向避撞极限进行了研究,得到了制动避撞和转向避撞的临界TTC(time-to-collision)值,并对比分析了两种避撞方式的适用性以及道路摩擦系数、重叠率等因素的影响.结果表明,转向避撞在高相对速度、低附着系数、低重叠率等工况下相比于制动避撞更有优势.
【总页数】6页(P1743-1748)
【作者】李霖;朱西产;陈海林
【作者单位】同济大学智能型新能源汽车协同创新中心,上海201804;上海国际汽车城(集团)有限公司,上海201804;同济大学智能型新能源汽车协同创新中心,上海201804;上海国际汽车城(集团)有限公司,上海201804
【正文语种】中文
【中图分类】U461.9
【相关文献】
1.一种基于驾驶员制动行为的车辆主动避撞模型研究 [J], 刘志强;张春雷;倪婕;朱伟达
2.基于驾驶员特性的主动避撞分级制动策略与验证 [J], 胡远志;杨喜存;刘西;黄玲
3.基于驾驶员反应时间的自动紧急制动避撞策略 [J], 郑刚;俎兆飞;孔祚
4.基于驾驶员反应时间的自动紧急制动避撞策略 [J], 郑刚;俎兆飞;孔祚
5.智能汽车极限工况下联合制动与转向的自动紧急避撞研究 [J], 来飞;黄超群;董红亮;陈涛;赵树廉
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车自动紧急制动系统行人避障策略及仿真
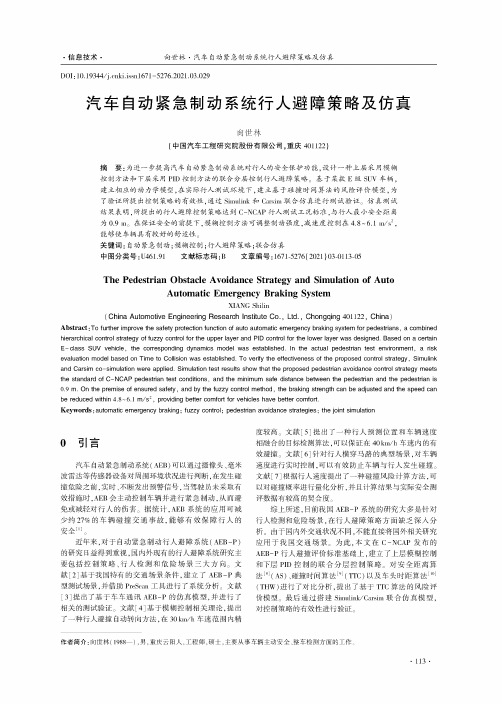
表2部分模糊规则
△s
△V0
ar
Z0
Z0
N2
Z0
N10
N7
P1
N1
Z0
P1
N9
N7
P2
N2
N1
P2
N8
N6
P3
N3
N1
P3
N7
N4
P4
N4
N1
P4
N6
N2
P5
N5
N0
P5
N5
N1
P6
N6
N1
P6
N4
N0
P7
N7
N1
P7
N3
N0
2.3 AEB-P下层PID制动控制系统
下层PID控制系统将期望减速度以制动管路压力信 号的形式传递到车辆制动系统,实现对车辆的速度控制。 期望减速度以及期望减速度与实际减速度两者之间的差 值作为PID控制器输入参数,制动管路压力值作为PID 控制器输出参数,以期望减速度和实际减速度的差值作为 误差控制参数,得出PID控制器的比例参数kp = 5,积分参 数ki = 15,微分参数k“=0。
I
行人信息
|行态识别] MK评估
I模糊控制I
7车信息
下层PID控制|
3
制动管路 压力控制
图1 AEB-P系统工作原理
2.2 AEB-P上层模糊控制系统
本文建立的模糊控制器输入参数为车辆与行人纵向 相对速度=0-"2,km/h)以及车辆与行人相对距 离As(m)o模糊输入参数、输出参数的语言变量可以划 分为"10(负大)-N1(负小)、Z0(零)、P1(正小)-P7(正 大)。As的论域范围为[0,80],采用Z0、P1、P2、P3、P4、 P5、P6、P7这8个变量描述(图2)。A"”的论域范围为 [-150,0],采用 Z0、"1、"2、"3、"4、"5、"6、"7、"8、"9、 "10这11个语言变量进行描述(图3)。输出量期望减速 度 a,(m/s2)的论域为[-10,0],采用 Z0、"1、"2、"3、"4、 "5、"6、"7这8个变量描述(图4)。
一种车辆主动紧急避撞的控制方法、装置及存储介质与流程

一种车辆主动紧急避撞的控制方法、装置及存储介质与流程引言车辆紧急避撞技术是现代汽车安全系统中的重要组成部分。
为了提高车辆的主动安全性能,本文介绍了一种车辆主动紧急避撞的控制方法、装置及存储介质与流程。
背景随着道路交通密度的增加,车辆之间的碰撞事故频繁发生。
为了减少交通事故的发生以及提高驾驶的安全性,研发一种车辆主动紧急避撞的控制方法和装置尤为重要。
目标本文的目标是设计一种能够实现车辆主动紧急避撞的控制方法,通过该方法,车辆能够快速、准确地识别潜在的碰撞威胁,并采取相应的措施来避免事故的发生。
方法本文提出的车辆主动紧急避撞的控制方法包括以下几个步骤:1.传感器数据获取:车辆安装了多个传感器用于感知周围环境,包括雷达、摄像头、激光雷达等。
2.数据预处理:对传感器采集到的原始数据进行预处理,包括滤波、去噪、坐标转换等,以提高数据质量和准确度。
3.碰撞威胁检测:利用机器学习和计算机视觉技术,对预处理后的数据进行分析和处理,以检测潜在的碰撞威胁。
4.碰撞威胁评估:根据检测到的碰撞威胁,对其进行评估和分类,确定威胁的严重程度和优先级。
5.决策制定:基于碰撞威胁的评估结果,车辆系统会自动制定相应的避撞策略,例如刹车、转向等,以尽量避免碰撞的发生。
6.控制指令输出:根据制定的避撞策略,车辆系统会生成相应的控制指令,通过车辆的控制系统将指令传达给相应的执行器。
7.实时控制:车辆系统根据检测到的碰撞威胁和制定的避撞策略,实时监控车辆状态并调整控制指令,以确保最佳的避撞效果。
装置及存储介质为了实现上述车辆主动紧急避撞的控制方法,需要配备以下装置和存储介质:•传感器装置:包括雷达、摄像头、激光雷达等,用于获取周围环境的数据。
•控制装置:负责处理传感器数据并执行避撞策略,通过控制指令控制车辆行动。
•存储介质:用于存储传感器数据、避撞策略和控制指令等信息,可以是内置的存储器或外部存储设备。
流程以下是车辆主动紧急避撞的流程示意图:graph LRA[传感器数据获取] -- B[数据预处理]B -- C[碰撞威胁检测]C -- D[碰撞威胁评估]D -- E[决策制定]E -- F[控制指令输出]F -- G[实时控制]1.传感器数据获取:车辆上的传感器会实时获取周围环境的数据。
《基于制动和转向的智能车避撞控制研究》
《基于制动和转向的智能车避撞控制研究》一、引言随着汽车技术的快速发展和人工智能技术的深入应用,智能车避撞控制系统成为了一个热门且具有挑战性的研究领域。
这一技术可以有效提升驾驶安全性和舒适性,降低交通事故发生率。
本文旨在研究基于制动和转向的智能车避撞控制技术,探讨其系统架构、工作原理及性能优化,为智能车避撞控制系统的研发提供理论支持和实践指导。
二、智能车避撞控制系统的基本架构智能车避撞控制系统主要由环境感知、决策规划、控制执行等部分组成。
其中,环境感知通过传感器获取车辆周围环境信息,如道路状况、障碍物等;决策规划根据感知信息制定避撞策略,如制动或转向等;控制执行则根据决策规划结果,通过控制车辆的制动系统和转向系统来实现避撞。
三、制动系统在避撞控制中的作用制动系统是智能车避撞控制系统的重要组成部分,其主要作用是在发现潜在碰撞危险时,通过降低车速或停车来避免碰撞。
在避撞控制过程中,制动系统需要根据实时感知的环境信息和决策规划结果,快速、准确地调整制动力,以实现最佳的避撞效果。
此外,制动系统还需要与其他控制系统协同工作,以保证车辆的稳定性和舒适性。
四、转向系统在避撞控制中的作用转向系统在智能车避撞控制中同样发挥着重要作用。
当车辆面临侧向碰撞危险时,转向系统可以根据决策规划结果,通过调整车辆的行驶方向,使车辆避开障碍物。
转向系统的响应速度和精度直接影响到避撞效果和车辆稳定性。
因此,转向系统需要与制动系统、决策规划等其他系统紧密配合,以实现最佳的避撞效果。
五、基于制动和转向的避撞控制策略基于制动和转向的避撞控制策略主要包括以下几种:1. 制动优先策略:在发现潜在碰撞危险时,首先通过制动系统降低车速或停车,以避免碰撞。
当制动无法避免碰撞时,再考虑采用转向等其他措施。
2. 制动与转向协同策略:根据实时感知的环境信息和决策规划结果,同时调整制动系统和转向系统,以实现最佳的避撞效果。
这种策略可以提高车辆的稳定性和舒适性,但需要更复杂的控制系统和算法支持。
《基于制动和转向的智能车避撞控制研究》
《基于制动和转向的智能车避撞控制研究》篇一一、引言随着智能交通系统的快速发展,自动驾驶汽车逐渐成为未来交通的重要趋势。
避撞系统作为自动驾驶汽车的核心技术之一,其重要性不言而喻。
本文旨在研究基于制动和转向的智能车避撞控制技术,以提高智能车的安全性和行驶稳定性。
二、研究背景及意义近年来,随着人工智能、传感器技术和控制理论的发展,智能车避撞控制技术取得了显著的进步。
基于制动和转向的避撞控制策略是实现智能车安全行驶的关键技术之一。
研究该技术不仅有助于提高智能车的安全性,降低交通事故率,还有助于提升智能车的行驶效率和驾驶体验。
三、制动和转向避撞控制技术研究1. 制动避撞控制技术制动避撞控制技术主要通过控制车辆的制动系统,使车辆在遇到危险时能够及时减速或停车,从而避免碰撞。
该技术主要依赖于雷达、激光雷达和摄像头等传感器获取周围环境信息,结合车辆的动力学模型和驾驶者的意图,计算出最优的制动策略。
在实际应用中,需考虑制动系统的响应速度、制动力矩等因素。
2. 转向避撞控制技术转向避撞控制技术主要通过控制车辆的转向系统,使车辆在遇到危险时能够及时改变行驶方向,从而避免碰撞。
该技术主要依赖于高精度地图、导航系统和传感器融合等技术,实现对周围环境的感知和判断。
在计算最优转向策略时,需考虑车辆的动力学特性、道路条件、驾驶者的意图等因素。
四、基于制动和转向的避撞控制策略研究在实际应用中,制动和转向避撞控制技术往往需要相互配合,以实现最优的避撞效果。
本文提出一种基于制动和转向的智能车避撞控制策略,该策略主要包括以下几个步骤:1. 环境感知:通过雷达、激光雷达和摄像头等传感器获取周围环境信息,识别出潜在的碰撞风险。
2. 危险评估:结合车辆的动力学模型和驾驶者的意图,对潜在碰撞风险进行评估,确定避撞策略的优先级。
3. 制动控制:根据危险评估结果,计算出最优的制动策略,并控制车辆的制动系统实施制动。
4. 转向控制:在必要时,结合高精度地图、导航系统和传感器融合等技术,计算出最优的转向策略,并控制车辆的转向系统实施转向。
《基于算法融合的自动紧急制动控制策略研究》
《基于算法融合的自动紧急制动控制策略研究》一、引言随着智能交通系统的不断发展,汽车的安全性能已经成为重要的研究领域。
自动紧急制动系统(AEBS)是其中一种关键技术,可以有效地降低交通事故发生率并减少伤亡程度。
为了进一步增强AEBS系统的性能,本研究着重探讨基于算法融合的自动紧急制动控制策略,以实现对环境的精准感知、准确的判断以及及时的制动反应。
二、背景及意义自动紧急制动系统是现代汽车安全技术的重要组成部分,它能够实时监测车辆周围的环境,当系统检测到潜在碰撞风险时,会自动进行制动以避免或减轻碰撞造成的损害。
然而,传统的AEBS系统在复杂多变的交通环境中仍存在误判、反应迟钝等问题。
因此,研究基于算法融合的自动紧急制动控制策略具有重要的现实意义。
三、算法融合技术概述算法融合技术是利用多种算法的优点,通过一定的策略将它们组合起来,以实现更优的系统性能。
在自动紧急制动系统中,算法融合主要包括传感器数据融合、决策算法融合以及控制策略优化等方面。
这些技术能够提高系统的感知精度、判断准确性和反应速度。
四、算法融合的自动紧急制动控制策略研究(一)传感器数据融合传感器数据融合是算法融合的基础。
本研究采用多传感器融合技术,包括雷达、激光雷达、摄像头等,以实现对车辆周围环境的全方位感知。
通过数据预处理、特征提取和决策层融合等技术手段,提高传感器数据的准确性和可靠性。
(二)决策算法融合决策算法是AEBS系统的核心部分。
本研究采用多种决策算法进行融合,包括基于规则的决策算法、基于机器学习的决策算法和基于优化理论的决策算法等。
这些算法能够根据不同的交通环境和车辆状态,进行准确的判断和决策。
(三)控制策略优化控制策略是AEBS系统实现自动制动的关键。
本研究通过对传统控制策略进行优化,引入智能控制、模糊控制等先进控制方法,以实现对制动过程的精准控制。
同时,结合决策算法的输出,制定合理的制动策略,确保系统在各种交通环境下都能做出及时、准确的反应。
紧急制动系统分层控制策略研究
关键词:紧急制动系统;车辆稳定性;分层控制;模糊控制
1 引言
随着汽车保有量增高,由驾驶员缺乏经 验、注意力不集中、疲劳驾驶等造成的碰撞 事故比例逐年增大。紧急工况下,制动辅助 系统可有效的降低碰撞事故的发生,使用前 碰 撞 预 警 FCW 与 自 动 避 撞 辅 助 系 统 AEB 使 追 尾 碰 撞 伤 害 发 生 率 分 别 降 低 了 20%、 45%[1],因此,紧急制动系统相关研究得到广 泛关注。信度,而触发过晚无法有效避免碰 撞事故发生。可见,AEB 系统控制策略的研 究对于自动避撞辅助系统具有重要意义。
2 紧急制动系统工作阶段与模式
当紧急工况发生时,紧急制动系统提前 对制动系统进行准备并且对驾驶员提供可能 发生碰撞的报警。如果驾驶员在紧急的情况
下作出了反应,但是制动力不足,那么制动 系统会提供剩余的制动力来达到最佳的目标 制动力以避免碰撞。当危险程度升级,而驾 驶员未采取制动时,系统进行自动紧急制动, 避免碰撞发生。
行紧急制动系统触发与工作模式判断。
模糊控制器输入量为驾驶员激进程度与
碰撞时间,输出为车辆紧急危险度,同时引
商用车自动紧急刹车系统避撞策略分析
商用车自动紧急刹车系统避撞策略分析摘要:我国近年来高发的交通安全事故时刻提醒着交通出行的安全问题,其中尤其是商用车若出现交通事故则可能会造成不可挽回的重大损失。
面对提升车辆安全性能的要求,本文对商用车自动紧急刹车系统的避撞展开研究分析。
基于对驾驶人驾驶车辆过程中的自动紧急刹车避撞应用感受进行调查,研究紧急刹车所具有的特性,并提出了基于碰撞时间倒数下的避撞举措,以期为商用车的自动紧急刹车系统避撞研究提供参考。
关键词:商用车;自动紧急刹车;避撞引言:依托于发达的交通道路,促使我国社会经济获得了良好的发展机遇,而汽车制造行业同样借助于这样的优势实现了多元发展。
其中以商用车为例,作为满足货物与人员运输的重要交通工具,商用车占总机动车保有量总数的占比不断提升。
但是随之而来的就是在商用车运行过程中可能会发生的碰撞事故,引发安全问题,对人民大众的人身安全造成了威胁,因此探究商用车的自动紧急刹车避撞至关重要。
1 商用车自动紧急刹车应用感受为了更好的研究商用车所具有的自动紧急刹车系统是否具有良好的避撞功能,就需要对商用车的驾驶员主观应用感受进行分析,这是由于驾驶员本身的行为差异相对较大,在驾驶商用车的过程中,受到不同环境影响对危险的感知能力存在差异,因此在驾驶车辆过程中的安全影响因素不定,主观安全感知也将会受到影响,则对驾驶员的安全感知差异进行分析,则能够更好的因人而异做出相适配的自动紧急刹车系统避撞处理。
通过问卷调查,共计发放500份调查问卷,以驾驶物流车、大型客货运车辆的驾驶员为主进行问卷调查,在问卷中设置了是否发生驾驶事故的主观问题,并设计了有关天气、路段、疲劳驾驶、酒后驾驶以及照明等影响因素的分析,从以上内容对驾驶员的主观驾驶感受进行研究。
共计回收468份调查问卷,其中有效问卷数量为442份。
调查结果显示,其中大多数驾驶员认为造成碰撞安全事故发生的主要原因包括行车路复杂、酒驾、疲劳驾驶三个方面的因素,其中超过80%的驾驶员认为在驾驶过程中饮酒可能会促使驾驶员无法正确评估路面交通状况而出现频繁急刹车的现象[1]。
自动驾驶车辆的紧急刹车与避障系统设计和性能验证
自动驾驶车辆的紧急刹车与避障系统设计和性能验证
李宜冬
【期刊名称】《大众汽车》
【年(卷),期】2024()2
【摘要】本文提出一种基于深度学习的障碍物识别算法,能准确识别前方车辆、行人等障碍物,并实时计算刹车和转向控制。
该算法已集成到自动驾驶车辆的AEB系统中,并经过多种实地试验,包括不同场景,如前方车辆制动、行人横穿道路等。
试验结果显示,AEB系统能有效避免碰撞,显著提升车辆行驶安全性。
【总页数】3页(P0004-0006)
【作者】李宜冬
【作者单位】江苏省宿迁市宿豫区财政局
【正文语种】中文
【中图分类】U
【相关文献】
1.自动驾驶车辆自主避障和路径规划技术综述
2.面向低速自动驾驶车辆的避障规划研究
3.基于前车意图识别的自动驾驶车辆实时避障换道策略研究
4.基于激光雷达的车辆避障与紧急刹车系统的研究
5.基于自适应预瞄路径的自动驾驶车辆寻迹和避障控制
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽 车 工 程 Automotive Engineering
2015 ( Vol. 37 ) No. 2
2015030
自主紧急制动系统避撞策略的研究
李 马志雄 霖, 朱西产, 董小飞,
( 同济大学汽车学院, 上海 201804 )
[ 摘要] 本文中提出了一种新的自主紧急制动系统避撞策略 。 首先基于真实交通工况中驾驶员的紧急制动 行为构建了危险估计模型; 然后开发了两级预警两级制动的避撞策略, 它根据危险估计模型计算出的危险等级选取 相应的介入方式。PreScan 仿真结果表明, 该策略可有效避免碰撞或减轻碰撞的程度 。
[9 ] 在较短的时间内做出正确的判断和反应 。 文献 [ 10] 在检测到有碰撞危险存在但危险 中的研究表明,
因此, 本文中只选用 40km / h 以下的数据进行分析。 6] 7] , 另外根据文献[ 和文献[ 驾驶员的制动行为与 TTC 的倒 数 ( TTC - 1 ) 密 切 相 关, 因 此, 本文中选用 -1 TTC 代替 TTC , 最终得到驾驶员紧急制动开始时 TTC - 1 与本车速度之间的关系, 同时对数据进行线 性拟合, 并求出 90% 的预测区间 ( 见图 5 ) 。 其中 50 百分位线是通过线性拟合得到, 可认为约有 50% 的 驾驶员在 TTC 达到该线时已经采取了紧急制动操 作。可以看出, 驾驶员紧急制动开始时的 TTC 值并 不是一个定值, 而是与自车速度成一定关系, 这点与 8] 文献[ 中得出的结论一致。5 百分位线和 95 百分
-1 位线包围区域为驾驶员紧急制动开始时刻 TTC 值 95 百分位线表示当 TTC - 1 达到该 的 90% 预测区间, -1
曲线所表示的值时, 估计约有 95% 的驾驶员已经采 取了制动。而 5 百分位线表示只有约 5% 的驾驶员 在 TTC 达到该曲线所表示的值时采取了紧急制动 操作。
-1
程度不高时, 也应该给予驾驶员提示性的警告, 告诉 驾驶员危险类型和危险方位等更具体的信息。因此, 本文中采用提示性预警加碰撞预警两级预警策略。
关键词: 主动安全; 自主紧急制动系统; 避撞策略; 危险工况; 危险估计; PreScan
A Research on the Collision Avoidance Strategy for Autonomous Emergency Braking System
Li Lin,Zhu Xichan,Dong Xiaofei & Ma Zhixiong
2015 ( Vol. 37 ) No. 2
李霖, 等: 自主紧急制动系统避撞策略的研究
[5 ]
, 结果如图 2 所示, 最典型的 6 类危险工
况共有 303 例, 占所有危险工况总数的 70% 。 本文 中采用这 303 例危险工况来分析驾驶员行为。 在这 303 例危险工况中, 所有驾驶员都采取制
· 170 ·
汽
车
工
程
2015 年( 第 37 卷) 第 2 期
3
3. 1
AEB 避撞策略研究
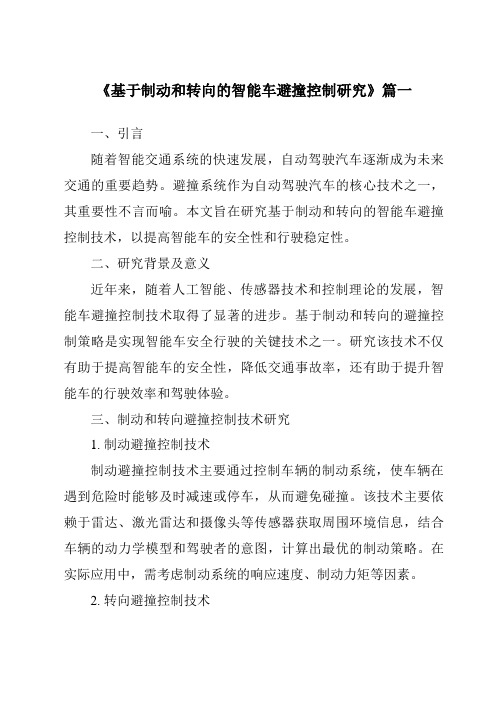
图3 图1 通过 VDR 采集真实交通场景
紧急制动平均减速度绝对值分布及拟合曲线
另外, 分析驾驶员在紧急制动开始时刻的 TTC ( timetocollision) 值, 这里驾驶员紧急制动开始时刻 定义为车辆制动响应开始时刻, 并未考虑制动器带 来的延迟。实际上由于制动器响应延迟的影响, 驾 驶员开始紧急制动的时刻应比本文中得出的时刻更 早, 但为分析方便, 将制动器延迟时间归入驾驶员反 应时间的范畴, 不作为一个单独的因素进行分析。 TTC 是指同一路径上同向行驶的两车保持当前速度 直到碰撞发生所需要的时间, 即 TTC = - x r / v r v r 含义如图 4 所示。 式中 x r 、 为数据提取方便准确, 在计算驾驶员紧急制动 开始时的 TTC 值时, 只选用前车减速工况。 同时, 由于用于工况采集的车辆行驶范围主要集中在城 市, 所有危险工况基本都分布在车速 40km / h 以下, ( 1)
50 百分位线、 95 百分位线和 5 百分位线的表达 式分别为 TTC - 1 = 1. 1184 - 0. 0131 v f TTC - 1 = 1. 7609 - 0. 0128 v f TTC
-1
( 2) ( 3) ( 4)
= 0. 476 - 0. 0134 v f
本文中主要利用 TTC 来判断危险等级并进行 -1 危险区域的划分。当 TTC 值高于 95 百分位线时, 危险等级极高, 进入危险区域 Ⅴ。 考虑到当车速较 高时, 驾驶员通过转向操作回避碰撞的趋势增
2
驾驶员紧急制动行为特征提取
通过 VDR 采集获得了总计约 4 000 例触发工
况, 对这些数据进行人工筛选, 去掉没有碰撞危险的 工况, 最终得到 8 例事故和 1 200 例危险工况。然后 通过主观评价对这 1 200 例危险工况的危险程度进 行分级, 从中挑选出共计 430 例危险程度较高的工 况, 并将它们按照 NHTSA 提出的 37 类预碰撞场景 进行分类
AEB 介入策略
如图 6 所示, 把驾驶员所处的交通环境按照危 1 表示碰撞无法回 险程度 ( 0 表 示 没 有 碰 撞 危 险,
图4 相关参数定义
AEB 系 避) 划分为 Ⅰ - Ⅴ 5 个区域。 在区域 Ⅰ 时, 统没有检测到碰撞发生的危险, 系统无任何动作。 AEB 系统监测到有碰撞危险, 在区域Ⅱ时, 但危险程 度较低, 系统采用基于图像的提示性预警提醒驾驶 员危险的存在。 在区域 Ⅲ 时, 危险等级上升到较高 水平, 此时系统向驾驶员发出碰撞预警提醒驾驶员 碰撞将要发生, 采用声音和图像双重警告。 在区域 Ⅳ时, 碰撞的危险很高, 系统在发出碰撞预警的同时 采用部分制动。在区域Ⅴ时, 碰撞的危险极高, 碰撞 AEB 系统采用完全制动。 即将发生甚至无法避免, 传统的 AEB 系统只在危险等级较高时发出预警, 即 , 只有碰撞预警 通常是简单的灯光闪烁或者蜂鸣声, 这些信息是二元的, 包含的危险信息较少, 并且留给 驾驶员的时间很短, 根据这些信息驾驶员通常很难
前言
原稿收到日期为 2013 年 4 月 28 日, 修改稿收到日期为 2013 年 7 月 24 日。
2015 ( Vol. 37 ) No. 2
李霖, 等: 自主紧急制动系统避撞策略的研究
· 169 ·
况的 AEB 系统的避撞策略。 首先利用可视化行车 记录仪对真实的交通工况进行采集, 并对采集到的 工况进行筛选和分类得到典型的危险工况, 接着对 典型危险工况下驾驶员的紧急制动行为进行分析, 然后按照驾驶员的紧急制动行为分析结果建立危险 估计模型和避撞策略, 最后通过 PreScan 建模仿真对 所提出的 AEB 避撞策略进行了验证。
1
真实交通工况的采集
图2
危险工况分类结果
获取我国真实的交通工况和驾驶员行为பைடு நூலகம்开发 适合我国的 AEB 系统避撞策略的前提。 出租车具 有运营时间长, 运行道路覆盖范围广等特点, 因此特 别适用于快速获取真实的交通工况。 从 2008 年开 始, 课题组通过在数辆出租车和警车上安装可视化 车辆行驶记录仪( video drive record,VDR) 对上海市 嘉定区的真实交通场景进行采集 ( 图 1 ) 。VDR 内置 一个摄像头记录车辆前方视野的道路交通影像, 其 他一些信息如车辆速度和纵向与侧向加速度等也同 时记录。本文中所用的 VDR 在纵向或侧向加速度 绝对值大于 0. 4 g 时触发, 只记录触发前 15s 和触发 后 5s 的数据。
School of Automotive Studies,Tongji University,Shanghai 201804
[ Abstract] A new collision avoidance strategy for an autonomous emergency braking system is proposed in this paper. Firstly a risk assessment model is established based on the emergency braking behavior of driver in real traffic scenarios. Then a collision avoidance strategy with two levels of warning and two levels of braking intensity is developed ,which chooses corresponding ways of interventions according to the risk level calculated with risk assessment model. Simulation results with PreScan show that the strategy proposed can effectively avoid collisions or mitigate the severity of collisions. Keywords: active safety; autonomous emergency braking system ; collision avoidance strategy; risk scenario; risk assessment; PreScan ECE 也发布了 AEB 法规。在法 车安全性评价体系, AEB 已经成为当前主动安全技 规和标准的推动下, 术的研究热点。 自动紧急制动系统 ( autonomous emergency braking system,AEB ) 是重要的主动安全技术, 该系统 在检测到车辆前方出现碰撞危险时, 通过声音和图 像等方式向驾驶员发出警告, 提醒驾驶员采取措施 。 回避碰撞 如果驾驶员没有及时对警告信号做出正 确反应, 碰撞危险变得十分紧急时, 系统通过自动制 动来回避碰撞或减轻碰撞程度。 AEB 系统具有很大的安全潜力。 EuroNCAP 的 AEB 可以避免 27% 的交通事故, 研究表明, 同时能 大幅降 低 碰 撞 事 故 中 人 员 受 伤 害 的 程 度。 因 此, AEB 受到了各国政府和评价机构的高度重视, EuroNCAP 从 2014 年开始把 AEB 场地测试结果纳入整 1] 目前国外对 AEB 的研究较多。文献[ 中基于 日本交通事故统计数据开发了一种带三级制动的避 2] 撞策略。文献[ 中基于专业驾驶员的紧急制动特 3]中对 征对 AEB 的介入策略进行了研究。 文献[ AEB 系统的技术要求、 成本和安全收益做了详细分 析。现在已有一些较为成熟的 AEB 产品进入市场, safety ) [4] 等。 但 比如 VOLVO 的城市安全系统 ( city驾驶员的 是由于不同国家和地区的交通环境不同, 驾驶习惯有很大差异, 因此国外已有的研究成果并 不能直接应用于我国。 而国内针对 AEB 的研究还 非常少, 目前没有成熟的研究成果。 据此, 本文中着眼于建立兼容我国特殊交通工