挖掘机控制系统的PLC控制
挖掘机plc控制系统
目录1、绪论 (1)1.1 设计挖掘机控制系统的意义 (1)1.2 挖掘机控制系统的概述 (1)2、系统工作原理 (2)3、挖掘机控制系统的硬件配置 (2)3.1 PLC简介 (2)3.2 CPU处理模块 (3)3.3 挖掘机控制系统的I/O分配 (4)3.4 挖掘机控制系统的外部接线 (5)4、挖掘机控制系统软件设计 (6)4.1编程软件介绍 (6)4.2挖掘机控制系统程序设计及分析 (6)4.2.1程序的设计 (6)4.2.2程序分析 (7)5、挖掘机控制系统监控界面的设计 (8)5.1 组态软件的概述 (8)5.2 定义数据词典 (9)5.3 用户界面的制作 (10)5.4命令语言的编写 (11)6、程序调试 (13)7、实验体会 (14)参考文献 (14)附录Ⅰ程序梯形图 (14)挖掘机控制系统霍圆沈阳航空航天大学北方科技学院摘要:随着我国经济的高速发展,城镇化建设的快速推进,这就需要大量的土木工程,而挖掘机作为土木工程施工机械的一种,就显得越来越重要。
本系统就是通过PLC控制来实现挖掘机模拟运行。
本文在介绍挖掘机的工作原理的基础上,采用PLC对下位机进行控制,包括硬件和软件的设计,实现了挖掘机的自动和手动控制,使挖掘机能够完成预先设计好的动作。
在PLC设计的基础上,本文又采用了组态王6.53对挖掘机控制系统进行上位端设计,使操作人员对挖掘机运行进行远程实时监控,增加了生产安全性。
关键词:挖掘机;组态王;PLC1、绪论1.1 设计挖掘机控制系统的意义挖掘机这一工具,在如今高速发展的中国被广泛应用于建筑行业、道路施工等多个方面,为我们的生产生活带来了诸多方便。
但有时会因操作不当或是突发状况而发生事故,甚至造成人员伤亡,对驾驶员的生命造成威胁。
所以,发展挖掘机的自动化就显得尤为重要,一个好的控制系统不仅仅可以提高工作的效率,而且还可以减少事故伤害和经济损失,可谓是一举多得。
1.2 挖掘机的概述挖掘机应用面广,使用量大,在工程机械市场占有很重要的地位,目前已成为工程机械第一主力机,挖掘机模仿人体构造,有大臂小臂和手腕,能扭腰旋转和行走,具有较长的臂和杆,可做空间六自由度动作,配装上各种工作装置能进行立体作业这种带有类似人类基因的挖掘机已成为人类工程建设中的主要伙伴之一,也被称为土建机械手,是建设机器人的代表正因为挖掘机通用性强,作业范围广,所以被认为是多功能的工程机械挖掘机和液压传动紧密地联系在一起,挖掘机作业动作多,运动复杂多样,所需功率大,而液压传动的特点是功率密度大,布置简单灵活,操纵容易方便,很适合挖掘机多处需要动力驱动各种工作装置的要求,是挖掘机理想的传动装置,是挖掘机基础, 同时,挖掘机对液压技术也提出了各种各样更高层次的性能要求,推动了液压技术的发展,促进了液压元件高压化多样化小型化发展从某些方面而言,挖掘机引领着液压技术发展的潮流此外,挖掘机作业过程中要求高效快速,因为作业动作的复杂性和操纵控制的困难性,只有采用先进的电子控制才能解决,所以挖掘机又成为工程机械中采用电子技术的代表,对发动机液压泵阀和马达都要控制,从个别控制发展到全面综合控制,从人工选择控制发展到智能自动控制许多的IT(信息)技术光测和光控技术以及远距离通讯( CT通信)技术等都已用于挖掘机上。
基于PLC的煤矿掘进机电控系统设计

基于PLC的煤矿掘进机电控系统设计摘要:掘进机的关键构成是电控系统,该系统与液压系统相互合作,以实现掘进机的各项作业,以及实现对各种系统的控制,如报警系统、照明系统等。
通常情况下,该设备所处的工作环境多具有温度较高、湿度较大、粉尘量较大及较强的电磁干扰等特点,掘进机的传统电控系统不具备较高的可靠性,也无法达到较低的故障率。
关键词:PLC控制技术;煤矿掘进机;系统;设计与传统的掘进机电控系统相比,笔者所介绍的电控系统具备更高的安全度、更低的故障率。
以模块化设计为根本,促使硬件升级,实施故障自诊断,方便检修,使矿井下的工作需求得以满足。
该系统目前在实际生产中已得到广泛运用,且工作状态良好。
1PLC技术说明PLC作为一种新型的控制器,以其信息传输方便、逻辑能力强、安全系数高、体积小等优点,取代了传统的继电器控制器,在继电器集成中得到了广泛的应用。
PLC可编程逻辑控制器(可编程逻辑控制器,简称PLC),它采用一类可编程的存储器,用来在其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出的机械或生产过程控制的各种类型进行操作。
PLC用可编程控制器取代继电器控制系统中大量的中间继电器、时间继电器、计数器等装置,使控制柜的设计、安装、接线工作量大大降低。
采用顺序控制设计方法设计了可编程控制器的梯形图程序。
这种编程方法很有规律,很容易掌握。
对于复杂的控制系统,梯形图的设计比同一功能的继电器系统电路图时间要少得多。
PLC可编程控制器的用户程序,可以在实验室模拟测试中,用一个小开关输入信号来模拟,通过在LED上的发光二极管可以观察到输出信号的状态。
在系统的安装和布线完成后,通过修改程序,可以解决现场系统调试过程中发现的问题,而且系统的时间比中继系统少。
PLC是基于继电器和计算机技术,它已逐渐成为微处理器的核心器件。
通过自动控制技术、通信技术、计算机技术等,全面加强了PLC自身的应用效果。
PLC在液压挖掘机节能中的运用探讨

PLC在液压挖掘机节能中的运用探讨企业的青睐。
液压挖掘机具有以下六大系统:传动系统,主要有液压传动、液力传动以及气压传动三种方式,优点包括灵活性高、运动平稳、控制方便、使用周期长等;动力系统,柴电机通过对油门开度的控制以实现调节转动的目的;元件系统,对液压泵的控制都是通过调节摆角实现的;阀控系统,用先导阀控制先导油液,再用先导油液控制换向阀的主阀芯;执行系统;控制系统。
1.2 PLCPLC全称Programmable Logic Controller,是可编程逻辑控制器,也称可编程控制器件,主要用于执行逻辑运算、顺序控制、定时、计数以及算术操作等用户指令,同时通过数字或模拟信号输入或输出的方式控制机械的运行。
PLC实际上是一种专门应用在工业控制的计算机系统,它的硬件设备在结构和外观上和普通的家用一体机类似,主要结构包括电源、CPU、存储器、接口电路、功能模块和通信模块。
PLC的工作原理可以分为三个阶段,第一阶段是输入采样,第二阶段是用户程序执行,第三阶段是输出刷新阶段。
PLC的功能特点为使用方便、功能强大、性价比高、配套设施齐全;可靠性高、安装工作量少一级维修方便等。
2 节能原理液压挖掘机的主要动力来源是发动机,通过发动机驱动并通过液压传动到施工设备上,因此决定液压挖掘机节能效果的关键在于发动机和液压泵功率的匹配程度,匹配程度越高,系统对能量的利用率也就越高,而匹配程度越低,系统对能量的利用率则越低,另外,较高的匹配度也有助于对PLC整体系统稳定性的提升。
针对当前的常规液压泵和发动机在匹配程度上存在的问题,此节能控制系统在进行发动机以及泵的功率匹配过程中,应将泵的功率曲线设定至发动机的功率曲线之上,然后控制发动机的油门,检测发动机转速,以这样的方式控制电流,再调节泵的排量,实现的方式主要是调节减压阀的电液比例,如此就能够保证泵在输出功率上能够始终在一个特定的、微小的范围内不断变化,绝不会超出这一区域,这样一来,泵的工作状态就会持续维持在比发动机功率低的情况下,由此也可以保证泵在工作时完全吸收发动机的功率,从而实现节能的要求。
基于欧姆龙PLC的挖掘机控制系统设计与实现

图 3 挖掘机机部分 P L C梯 形 图
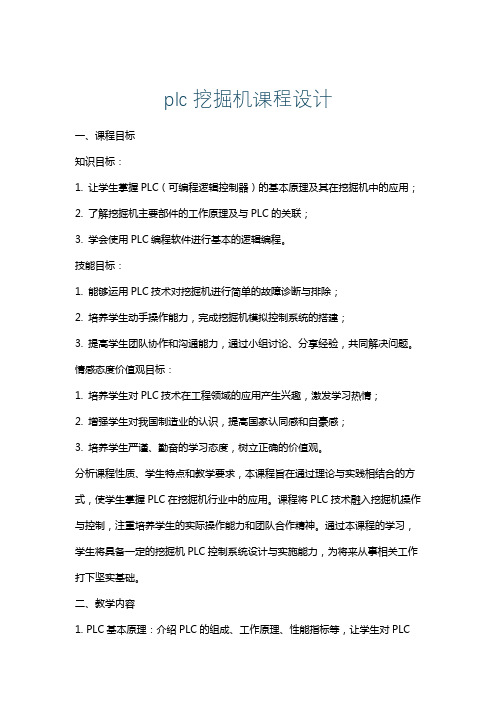
l 、 铲 斗 油缸 2 、 小臂 油 缸 3 、 大臂 油缸 4 、 中心接 头 5 、 回转 轴 承 6 、 回转装置 7 、 燃 油箱 8 、 液压油箱 9 、 控制阀 1 0 、 泵 装 置 1 l 、 发动机 l 2 、 散热 器 l 3 、 油冷 却 器 l 4 、 蓄 电池 1 5 、 行 走 装 置 l 6 、 减 震阀 l 7 、 先导截流阀 l 8 、 行 走先导阀 1 9 、 前端/ 回 转 先 导 阀 图 l 挖 掘 机 系统 的 基 本 结 构 图
科技 论坛
民营科技2 0 1 5 年第1 期
基于欧姆龙 P L C的挖掘机控制系统设 计与实现
刘 姝 廷 ’ 任 家 葆
( 1 . 沈 阳工 学院 , 辽 宁 抚顺 l 1 3 1 2 2 ; 2 . 沈阳工学院, 辽 宁 抚顺 l 1 3 1 2 2 ) 摘 要: 挖 掘机被广泛的使 用在 工程 建设 中 , 上位机采用组态王软件 , 下位机采用 O MR O N P L C对挖掘机 系统进行控制 , 介绍 了 自
2 挖掘机 系统的控制方案 本 系统 主 要 是 通 过 P L C实 现 挖 掘 机 实 物 教 学 模 型控 制 , 通过 控制j个直流 电机 的正反转来实现挖掘机 的基本动作。P L C采用 欧姆龙 C P 1 H 一 4 0 D R型 号,挖掘机控 制系统 主电路 原理图 如图 2
图3挖掘机机部分plc梯形图l铲斗油缸2小臂油缸3大臂油缸4中心接头5回转轴承6回转装置7燃油箱8液压油箱9控制阀10泵装置1l发动机l2散热器l3油冷却器l4蓄电池15行走装置l6减震阀l7先导截流阀l8行走先导阀19前端回转先导阀图l挖掘机系统的基本结构图2挖掘机系统的控制方案本系统主要是通过plc实现挖掘机实物教学模型控制通过控制j个直流电机的正反转来实现挖掘机的基本动作
plc课程设计--挖掘机
PLC课程设计报告设计题目:挖掘机班级:2010级电气(1)班专业:姓名:指导教师:目录一、PLC的发展史 (2)二、设计要求 (5)三、PLC各I/O口的功能 (6)四、硬件接线原理图 (7)五、软件程序设计 (8)六、动作调试过程 (10)七、设计心得体会 (10)八、参考文献 (11)一、P LC的发展史可编程控制器(Programmable Controller)是计算机家族中的一员,是为工业控制应用而设计制造的。
早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制随着技术的发展这种装置的功能已经大大超过了逻辑控制的范围,因此,今天这种装置称作可编程控制器,简称PC。
但是为了避免与个人计算机(Personal Computer)的简称混淆,所以将可编程控制器简称PLC。
(1) PLC 的由来在60 年代,汽车生产流水线的自动控制系统基本上都是由继电器控制装置构成的。
当时汽车的每一次改型都直接导致继电器控制装置的重新设计和安装。
随着生产的发展,汽车型号更新的周期愈来愈短,这样,继电器控制装置就需要经常地重新设计和安装,十分费时,费工,费料,甚至阻碍了更新周期的缩短。
为了改变这一现状,美国通用汽车公司在1969 年公开招标,要求用新的控制装置取代继电器控制装置,并提出了十项招标指标,即:1.编程方便现场可修改程序;2.维修方便采用模块化结构;3.可靠性高于继电器控制装置;4.体积小于继电器控制装置;5.数据可直接送入管理计算机;6.成本可与继电器控制装置竞争;7.输入可以是交流115V;8.输出为交流115V 2A 以上能直接驱动电磁阀接触器等;9.在扩展时原系统只要很小变更;10.用户程序存储器容量至少能扩展到4K。
1969 年,美国数字设备公司(DEC)研制出第一台PLC,在美国通用汽车自动装配线上试用,获得了成功。
任务书-挖掘机的PLC控制设计
南湖学院毕业设计任务书课题名称:挖掘机的PLC控制设计学生姓名:义雅峰系别:机械与电子工程系专业:机械设计制造及其自动化指导教师:李荣华2012 年 12 月 16 日1、主题词、关键词挖掘机、PLC控制、电气控制2、毕业设计内容要求挖掘机是一种广泛使用的大型工程机械,它主要由电气控制系统、液压系统、冷却系统、行走机构、运输机构等组成。
分析研究挖掘机系统的工作特点及控制要求,分析其原继电器-接触器控制系统的缺点,进行技术改造,基于PLC控制,设计其电气控制系统。
基本要求如下:⑴.挖掘机控制及工艺调研分析;⑵.列出具体控制要求;确定控制方案;⑶.绘制挖掘机电气系统的主电路图;⑷.PLC选择及I/O地址分配;⑸.绘制控制系统PLC的I/O口外围接线图;⑹.编写PLC控制程序(梯形图、语句表程序等);⑺.完善相关保护(如温度保护等)、联锁和报警系统;⑻.选择控制电路的电器元件,列出元器件明细表;⑼.撰写毕业设计说明书(论文)。
另外,须完成3000单词的与毕业设计课题相关的外文资料翻译。
3、文献查阅指引⑴.挖掘机⑵.电气设计手册⑶.电机与拖动⑷.电气控制技术⑸.PLC控制⑹.其它有关设计手册、设备及元器件选型手册4、毕业设计论文进度安排第1周:明确任务,资料搜集等前期准备;第2、3周:阅读相关文献及知识准备;第4、5周:内容要求第⑴、⑵项;第6、7周:内容要求第⑶、⑷项;第8—10周:内容要求第⑸、⑹项;第11周:内容要求第⑺项;第12周:内容要求第⑻项;第13、14周:内容要求第⑼项。
教研室意见:设计任务内容具有一定的工程实际价值,能训练学生对所学机电控制相关知识进行灵活运用,同时还满足科学的思维方式和正确设计思想培养的目的,符合机自专业要求,同意该毕业设计任务下达。
负责人签名:2012年 12月16日。
挖掘机控制系统的PLC控制

挖掘机控制系统的PLC控制————————————————————————————————作者:————————————————————————————————日期:个人收集整理勿做商业用途挖掘机控制系统的PLC控制摘要随着我国经济的高速发展,大规模土木工程建设越来越多,这就需要大量的土石方施工机械为其服务,而挖掘机作为土石方施工机械的一种,显得越来越重要。
本系统就是通过PLC实现挖掘机实物教学模型控制。
本文在介绍挖掘机的工作原理的基础上,采用PLC对下位机进行控制,包括硬件和软件的设计,实现了挖掘机的自动和手动控制,使挖掘机能够完成预先设计好的动作,提高工作效率,节约成本,把人从枯燥的工作中解放出来.在此设计的基础上,本文采用了组态王6。
52对挖掘机控制系统进行上位端设计,使操作人员对挖掘机进行远程监控,远离危险区域,避免在危险区域中施工造成不必要的人员伤亡。
最后本系统采取了相应的抗干扰措施,提高了系统的工作稳定性,使挖掘机达到了较为理想的控制效果。
关键词:挖掘机;组态王;PLC目录1 绪论 (1)1。
1 课题的背景 (1)1.1。
1 挖掘机的发展及应用 (1)1。
1。
2 挖掘机的现状及动向 (1)1。
1.3 挖掘机的分类 (2)1。
1。
4 PLC的发展及应用 (2)1.2 课题的目的和意义 (3)1.3 课题研究的主要内容 (4)2 挖掘机控制系统的硬件设计 (5)2.1 系统的工作原理 (5)2。
2 硬件设计的理论基础 (5)2.2.1 PLC的工作原理 (5)2.2.2 直流电机的工作原理 (7)2.3 PLC的选型 (8)2.4系统的资源分配 (8)2.5 系统的外部接线图 (9)2。
6 硬件的抗干扰措施 (10)3 挖掘机控制系统的软件设计 (12)3.1 PLC编程语言的概述 (12)3.2 挖掘机控制系统程序的设计 (13)3.2.1自动控制的设计 (13)3。
2。
2 手动控制的设计 (22)3。
PLC 在液压挖掘机中的节能应用
PLC 在液压挖掘机中的节能应用:液压挖掘机由于其工作状况复杂,能量损失巨大,节能技术研究一直是现代液压挖掘机技术发展的热点和方向。
液压挖掘机的动力系统多采用发动机驱动、液压传动的形式,因此发动机与液压泵的功率匹配恰当与否决定着系统能量利用率的高低及系统工作的平稳性。
方法:通过控制发动机的油门和检测发动机的转速,控制器发出控制电流,通过电液比例减压阀调节泵的排量。
单斗液压挖掘机发动机微机节能控制系统:单斗液压挖掘机是工程机械主要产品之一,具有作业灵活方便, 适应范围广等优点。
但由于单斗液压挖掘机作业工况复杂, 作业过程中负荷变化频繁, 变化范围大, 因而存在着不少环节的能量损失, 其中主要有发动机-变量泵系统的非经济性匹配运行产生的损失、液压系统压力油的流量损失和压力损失。
这些损失不仅浪费了能量,而且引起液压系统发热, 工作性能恶化。
为此, 单斗液压挖掘机的节能控制一直为人们所重视。
方法:该单斗液压挖掘机控制系统采用负荷传感,即以液压系统压力为判断信号, 判断挖掘机的工作状态, 由微机根据挖掘机所处的不同状态, 通过步进电机控制发动机油门, 使发动机稳定在要求的转速附近工作。
国内挖掘机行业的概况及其发展趋势:液压挖掘机是一种大功率设备,其能量的总利用率仅为20%左右。
当今世界,能源短缺,油价不断上涨。
节省燃油,提高操作效率,就意味着提高了设备的性价比,增强了设备的市场竞争力。
对于液压挖掘机,节能的目的不光是提高燃油利用率,提高设备的操作效率,还在于提高了设备的可靠性,从而达到降低使用成本的效果。
采用节能技术后,可以使动力系统与负载所需功率更好地匹配,减少液压系统功率损失,提高发动机功率的利用率,降低了发动机和液压元件的工作强度,从而提高设备在使用中的可靠性。
在液压挖掘机上实现发动机- 泵的功率匹配,主要是提高泵对发动机输出功率的吸收能力,在采用转矩控制或者转速感应控制实现泵-发动机精确匹配下,泵把吸收的发动机功率尽可能多地转化为液压能,实现节能效果。
燕山大学挖掘机plc控制

挖掘机PLC控制的实现课程名称:工厂电气与PLC控制技术指导教师:姚建涛,张庆玲,赵玉勤班级:工程机械小组成员:曹现超,李婧,陈晨2012-6-26挖掘机PLC控制的实现曹现超李婧陈晨摘要:随着生产的日益发展,机械的自动化程度要求越来越高,尤其是工程机械发面,而PLC控制技术在生产生活中应用相当广泛,该项目通过对工程机械中的挖掘机进行简单的电气改造,运用继电器、电阻、开关、二极管、传感器等元件并进行PLC软件编程,实现手自动转换功能,并实现简单挖掘移动动作程序控制,从而实现简单的自动化控制,提高了生产效率,有很大的发展空间。
一、项目介绍1、项目题目:典型工程机械的PLC控制实现2、工作内容:以工程机械中比较典型的设备作为控制对象,运用PLC结合继电器、电阻、开关、二极管、传感器等元器件,学生自主设计控制电路,并使用面包板搭接实验电路;检测电路的通断及可控性;掌握PLC编程软件的使用方法,运用所学PLC编程语言编写控制程序;调试程序完成对工程设备的控制。
二、控制要求1、挖掘机控制器接线说明P1:接plc输出0,控制左轮前进 P2:接plc输出1,控制左轮后退P3:接plc输出2,控制主臂抬起 P4:接plc输出3,控制主臂下降P5:接plc输出4,控制前臂抬起 P6:接plc输出5,控制前臂下降P7:接plc输出6,控制右轮前进 P8:接plc输出7,控制右轮后退GND:接PLC实验箱的GND A/HPO:接PLC输入1,手动 /自动切换A/H:接PLC的输出8,为手动控制开关提供电源2、操作要求:1)先手动将主臂下降到极限位置,前臂下降到极限位置。
2)编写自动程序,当自动开关接通时:1.挖掘机向前行走1.5S后停止。
2.挖掘机的主臂抬起1s后(假设遇到限位开关时)停止运动(0.5秒钟),挖掘机进行挖土的动作3.大臂下降1S(假设碰到小臂下限位开关)后停止0.5s,小臂接着下降1s(假设碰到小臂下限位开关)后,小臂抬起1S后大臂抬起,完成挖土动作。
PLC润滑控制器在大型挖掘机上的应用(1)

铜 业 工 程 2007 3文章编号:1009-3842(2007)03-0032-02PLC 润滑控制器在大型挖掘机上的应用田灵华,蔡学军(江西铜业集团公司德兴铜矿,江西德兴 334224)摘 要:介绍了江西铜业集团公司德兴铜矿在采矿主体设备大型进口挖掘机上成功应用PLC 自动润滑控制系统代换原有进口和国产系统的创新成果经验。
该系统有效地解决了原系统的缺陷,大大地提高了系统的作业效率,效益显著,具有推广价值。
关键词:PLC ;控制器;挖掘机;应用中图分类号:TD422.2文献标识码:B德兴铜矿是年采剥总量7000余万t 的特大型低品位露天铜矿,其采矿主体设备主要采用YZ-35牙轮钻机、斗容13m 3、16.8m 3和19.9m 3的大型进口挖掘机和载重量达150~190t 的进口自卸汽车。
目前国际上铜价居高不下,市场竞争激烈,因而提高设备效率与降低成本的压力巨大。
该矿采矿作业数十辆大型自卸汽车采用耗资数千万元引进的卫星定位卡车自动调度系统,为了更有效地发挥大型现代化技术装备的效率,进一步降低系统的作业成本,提高大型挖掘机的装载效率与行走速度、减少故障是待攻克的关键之一。
笔者针对原有润滑系统存在的问题成功地将PLC 润滑系统应用于大型挖掘机上,取得了明显效果。
1 原润滑系统存在问题德兴铜矿进口挖掘机的润滑系统采用两种控制器,一种是进口件,一种是国产件,其自动润滑原理相同。
由于挖掘机作业时振动大,加之润滑室内油污严重,酸性水气对设备腐蚀严重,导致进口件定时器弹簧生锈、齿轮易损坏,该进口备件为非通用件,继电器易脱落。
每台挖掘机使用3台控制器,都存在同一弊端:3台控制器经常会同时工作,造成供风压力降低而使之停机,严重影响其正常作业。
尤其是在行走过程中,更易发生这一故障。
以上问题导致其作业效率不高,成本升高。
收稿日期:2007-07-14进口控制器采用微型电机带动刻度盘,通过调节刻度盘上的时间定位孔插销来控制油泵注油时间周期;国产控制器采用分立元件可控硅、单结晶体管及继电器等,通过调整一电位计来控制油泵注油时间周期,通过调整另一电位计来控制故障报警时间。
plc挖掘机课程设计
plc挖掘机课程设计一、课程目标知识目标:1. 让学生掌握PLC(可编程逻辑控制器)的基本原理及其在挖掘机中的应用;2. 了解挖掘机主要部件的工作原理及与PLC的关联;3. 学会使用PLC编程软件进行基本的逻辑编程。
技能目标:1. 能够运用PLC技术对挖掘机进行简单的故障诊断与排除;2. 培养学生动手操作能力,完成挖掘机模拟控制系统的搭建;3. 提高学生团队协作和沟通能力,通过小组讨论、分享经验,共同解决问题。
情感态度价值观目标:1. 培养学生对PLC技术在工程领域的应用产生兴趣,激发学习热情;2. 增强学生对我国制造业的认识,提高国家认同感和自豪感;3. 培养学生严谨、勤奋的学习态度,树立正确的价值观。
分析课程性质、学生特点和教学要求,本课程旨在通过理论与实践相结合的方式,使学生掌握PLC在挖掘机行业中的应用。
课程将PLC技术融入挖掘机操作与控制,注重培养学生的实际操作能力和团队合作精神。
通过本课程的学习,学生将具备一定的挖掘机PLC控制系统设计与实施能力,为将来从事相关工作打下坚实基础。
二、教学内容1. PLC基本原理:介绍PLC的组成、工作原理、性能指标等,让学生对PLC有全面的认识。
教材章节:《自动化控制技术》第3章“可编程逻辑控制器原理”2. 挖掘机主要部件及其与PLC的关联:分析挖掘机各部件的工作原理,阐述PLC在其中的作用。
教材章节:《工程机械》第2章“挖掘机结构与工作原理”3. PLC编程软件的使用:学习PLC编程软件的基本操作,掌握逻辑编程方法。
教材章节:《可编程逻辑控制器应用》第4章“PLC编程软件的使用”4. 挖掘机PLC控制系统设计:结合实际案例,讲解挖掘机PLC控制系统的设计方法和步骤。
教材章节:《自动化控制系统设计》第6章“PLC控制系统设计实例”5. 挖掘机故障诊断与排除:介绍挖掘机常见故障,分析故障原因,学会运用PLC技术进行诊断与排除。
教材章节:《工程机械故障诊断与维修》第3章“挖掘机故障诊断与维修”6. 挖掘机模拟控制系统搭建:分组进行模拟控制系统搭建,培养学生的动手操作能力和团队协作精神。
PLC在工程机械上的应用

PLC在工程机械上的应用摘要如今,PLC在很多行业中都投入了使用,也确实带来了诸多的便利,且对于建筑行业而言也并不例外。
本文以土方开挖机为例,对PLC在工程机械上的应用提出了探讨、分析。
关键词PLC;工程机械;应用本文主要以建筑工程施工中所应用到的可连续工作的土方开挖机为例,进行了PLC在工程机械上的应用分析。
由于土方开挖机始终工作在条件恶劣的环境中,且单次作业的持续时间非常的长,这就使得在传统人工操作中其性能得不到最大程度的发挥,而将PLC应用其中,通过提高土方开挖机的自动化水平,能够在很大程度上提升其性能。
1土方开挖机的控制功能概述该土方开挖机所必须具备的几项基本控制功能应当包括挖掘链右摆控制、挖掘链左摆控制,挖掘链下降控制、挖掘链上升控制,翻转架下放控制、翻转架上升控制,浮动控制,手动与自动模式切换控制,挖坑与挖壕选项控制,以及转向、换挡、急停等十六项基本控制功能。
在该文中,还要将无线控制回路应用其中,实现车内控制与车外遥控控制均能用作土方开挖机操控。
1.1土方开挖机车上控制回路要依据土方开挖机车内的传感器信号输入以及电位器信号输入,来对开挖机进行动作控制,该动作应当包括行驶动作以及专业作业动作两个方面。
在按照预先制定的任务完成开外作业时,还要针对过程中可能出现的异常、失误进行警报提醒,并做出相应的弥补处理,比如中断操作。
除了这些作业动作控制,还应当有换挡、转向、油门调节、制动等控制能力。
1.2土方开挖机无线遥控回路以遥控的方式实现对土方开挖机的控制,要将控制信号发送至PLC,通过PLC来做出进一步的控制;同时,PLC还要将与开挖机状态相关的主要数据发送给遥控控制器,并实现即时同步,这样才能够保证开挖机的状态始终处于操作人员的控制之下。
在使用遥控器对开挖机进行操作控制的时候,控制器还应当针对控制命令给出合理性提示,再者就是当开挖机在作业过程当中出现异常情况时,也应当发出警报,并提供相应的决策建议。
挖掘机控制系统讲解

挖掘机控制系统沈阳航空航天大学北方科技学院摘要:进入21世纪以来,随着我国经济的高速发展,大规模土木工程建设越来越多,这就需要大量的土石方施工机械为其服务,而挖掘机作为土石方施工机械的一种, 显得越来越重要。
本系统就是通过PLC实现挖掘机实物教学模型控制。
本文在介绍挖掘机的工作原理的基础上,采用PLC对下位机进行控制,包括硬件和软件的设计,实现了挖掘机的自动和手动控制,使挖掘机能够完成预先设计好的动作,提高工作效率,节约成本,把人从枯燥的工作中解放出来。
在此设计的基础上,本文采用了组态王6.52对挖掘机控制系统进行上位端设计,使操作人员对挖掘机进行远程监控,远离危险区域,避免在危险区域中施工造成不必要的人员伤亡。
最后本系统采取了相应的抗干扰措施,提高了系统的工作稳定性,使挖掘机达到了较为理想的控制效果。
关键词:挖掘机;组态王;PLC1、绪论1.1、挖掘机的发展动态挖掘机应用面广,使用量大,在工程机械市场占有很重要的地位,目前已成为工程机械第一主力机,挖掘机模仿人体构造,有大臂小臂和手腕,能扭腰旋转和行走,具有较长的臂和杆,可做空间六自由度动作,配装上各种工作装置能进行立体作业这种带有类似人类基因的挖掘机已成为人类工程建设中的主要伙伴之一,也被称为土建机械手,是建设机器人的代表正因为挖掘机通用性强,作业范围广,所以被认为是多功能的工程机械挖掘机和液压传动紧密地联系在一起,挖掘机作业动作多,运动复杂多样,所需功率大,而液压传动的特点是功率密度大,布置简单灵活,操纵容易方便,很适合挖掘机多处需要动力驱动各种工作装置的要求,是挖掘机理想的传动装置,是挖掘机基础, 同时,挖掘机对液压技术也提出了各种各样更高层次的性能要求,推动了液压技术的发展,促进了液压元件高压化多样化小型化发展从某些方面而言,挖掘机引领着液压技术发展的潮流此外,挖掘机作业过程中要求高效快速,因为作业动作的复杂性和操纵控制的困难性,只有采用先进的电子控制才能解决,所以挖掘机又成为工程机械中采用电子技术的代表,对发动机液压泵阀和马达都要控制,从个别控制发展到全面综合控制,从人工选择控制发展到智能自动控制许多的IT(信息)技术光测和光控技术以及远距离通讯( CT通信)技术等都已用于挖掘机上。
PLC技术在起重机械电气控制系统中的应用探究

PLC技术在起重机械电气控制系统中的应用探究1. 引言1.1 PLC技术概述PLC技术是一种基于工业控制现代化需求而发展起来的自动控制技术,全称为可编程逻辑控制器。
它是一种数字计算技术,能够对输入信号进行逻辑运算、数据处理、对输出信号进行控制,并能实现自动化控制。
PLC系统主要由中央处理器(CPU)、输入/输出模块、存储器和通信模块等组成,能够满足各种工业领域的自动化控制需求。
PLC技术的应用范围非常广泛,几乎涵盖了所有需要自动化控制的领域,包括工厂生产线、机器设备、交通运输系统等。
其优势在于可编程性强、适应性好、可靠性高、稳定性强、易于维护和升级等特点,使其得到了广泛的应用和推广。
在工程领域中,PLC技术在起重机械电气控制系统中的应用尤为突出。
通过PLC技术,起重机械的电气控制系统能够实现精确的控制和准确的运行,提高了起重机械的运行效率和安全性。
PLC技术还可以实现对起重机械的远程监控和故障诊断,大大方便了起重机械的管理和维护。
PLC技术已经成为现代起重机械电气控制系统的重要组成部分,对促进起重机械行业的发展起到了积极的推动作用。
1.2 起重机械电气控制系统概述起重机械是指用来吊装和移动重物的机械设备,如大型吊车、起重机等。
起重机械的电气控制系统是指控制起重机械运行的电气系统,包括电机、传感器、控制器等组成的系统。
起重机械电气控制系统的主要功能是实现吊钩的上升、下降、前进、后退等动作,并确保吊运物品的安全和稳定。
起重机械电气控制系统一般由传感器、执行器、控制器等组成。
传感器用于监测吊运物品的重量、位置等信息,执行器用于控制吊钩的动作,控制器则负责对传感器和执行器进行控制和调节。
起重机械电气控制系统还具有自动化、远程监控、故障诊断等功能,能够提高起重机械的运行效率和安全性。
1.3 研究背景随着工业自动化水平的不断提高,起重机械在吊重、卸重和移动方面的要求也越来越高。
传统的电气控制系统往往无法满足这些复杂的控制需求,因此需要一种更加先进的控制技术来实现起重机械的精确控制。
掘进机PLC控制系统改进
:掘进机PLC控制系统改进本文通过可编程控制器对掘进机电控系统进行控制和改进,充分利用了可编程控制器的优点,最后改进并设计了PLC控制方法。
关键词:PLC;电控系统;掘进机现代社会要求制造业对市场需求作出迅速的反应,生产出小批量、多品种、多规格、低成本和高质量的产品,为了满足这一要求,生产设备和自动生产线的控制系统必须具有极高的可靠性和灵活性,可编程控制器(Programmable Logic Controller,PLC)正是顺应这一要求出现的,它是以微处理器为基础的通用工业控制装置。
他具有变成方法简单、功能强、适应性强、可靠性高、体积小和低功耗等许多优点,已经成为机电一体化的重要手段和发展方向。
1、悬臂式掘进机电控系统的基本要求1).在掘进机非司机操作侧必须设置能紧急停止运转的紧急停止按钮;2).应具有开机音响报警、延时接通油泵及切割电机的功能;3).应该为在掘进工作面和转载点进行照明用的掘进机前灯、尾灯提供照明电源;4).应设置支护闭锁开关;5).应设置水压继电器;6).在掘进机后部转载点应设置音响报警信号发送装置以及能紧急停止运转的按钮;7).应设置机载瓦斯检测报警断电仪;8).在强烈振动工况下能正常可靠地工作。
2、悬臂式掘进机电控系统的控制要求1).设备控制信号:在司机操作台上,要求能启动各个设备和电机,而且要求油泉电机、转载电机、板运输机的正向启动和切割电机的启动带自维持。
对于在各设备和电机启动之前,其控制交流电源变压器要求绝缘良好,如有绝缘不好现象,则各电机的控制电源不能得电(由绝缘保护器输出闭锁)。
另外各个电机都有各自的漏地和过热保护,切割电机还有过载、断相和短路保护。
2).各个设备或电机工作过程及关系首先必须启动油泵电动机使油路先工作,方可启动其它电动机。
a.油泵电动机:当油温、液位均处于正常状态时,可以通过操作台启动它。
只有当它启动后,其它电机的控制电源才能得电。
当液位过低或油温过高时它必须延时断电。
挖掘机控制系统的PLC控制

挖掘机控制系统的PLC控制摘要随着我国经济的高速发展,大规模土木工程建设越来越多,这就需要大量的土石方施工机械为其服务,而挖掘机作为土石方施工机械的一种, 显得越来越重要。
本系统就是通过PLC实现挖掘机实物教学模型控制。
本文在介绍挖掘机的工作原理的基础上,采用PLC对下位机进行控制,包括硬件和软件的设计,实现了挖掘机的自动和手动控制,使挖掘机能够完成预先设计好的动作,提高工作效率,节约成本,把人从枯燥的工作中解放出来。
在此设计的基础上,本文采用了组态王6.52对挖掘机控制系统进行上位端设计,使操作人员对挖掘机进行远程监控,远离危险区域,避免在危险区域中施工造成不必要的人员伤亡。
最后本系统采取了相应的抗干扰措施,提高了系统的工作稳定性,使挖掘机达到了较为理想的控制效果。
关键词:挖掘机;组态王;PLC目录1 绪论 (1)1.1 课题的背景 (1)1.1.1 挖掘机的发展及使用 (1)1.1.2 挖掘机的现状及动向 (1)1.1.3 挖掘机的分类 (2)1.1.4 PLC的发展及使用 (2)1.2 课题的目的和意义 (3)1.3 课题研究的主要内容 (4)2 挖掘机控制系统的硬件设计 (5)2.1 系统的工作原理 (5)2.2 硬件设计的理论基础 (5)2.2.1 PLC的工作原理 (5)2.2.2 直流电机的工作原理 (7)2.3 PLC的选型 (8)2.4系统的资源分配 (8)2.5 系统的外部接线图 ..................................................................... 错误!未定义书签。
2.6 硬件的抗干扰措施 (10)3 挖掘机控制系统的软件设计 (12)3.1 PLC编程语言的概述 (12)3.2 挖掘机控制系统程序的设计 (13)3.2.1自动控制的设计 (13)3.2.2 手动控制的设计 (22)3.3 软件的抗干扰措施 (24)4 人机界面的设计 (25)4.1 组态软件的介绍 (25)4.2 挖掘机监控系统的创建过程 (26)4.2.1 挖掘机监控系统设备的连接 (26)4.2.2 挖掘机监控系统数据变量的设计 (27)4.2.3 图形画面的制作及动画连接 (30)4.2.4 挖掘机监控系统的脚本程序 (33)5 挖掘机控制系统的调试 (35)5.1 硬件和软件的调试 (35)5.2组态监控软件和下位机的调试 (35)结论..................................................................................................... 错误!未定义书签。
基于PLC的挖掘机控制答辩稿

导师: 专业: 班级: 姓名: 学号:
课题研究的意义
我们这次的设计任务就是运用欧姆龙PLC和组态王仿 真软件来实现对挖掘机的整个自动控制过程的模拟和监控。 本文采用PLC对下位机进行控制,包括硬件和软件的 设计,实现了挖掘机的自动和手动控制,使挖掘机能够完 成预先设计好的动作,提高工作效率,节约成本。 本文采用了组态王6.53对挖掘机控制系统进行上位端 设计,我们需要运用组态王软件与PLC通讯连接,利用组 态王对其进行仿真模拟,通过制作相关的监控画面,再把 挖掘机的静态画面动态连接起来以此实现挖掘机实物模型 控制及远程监控。
挖掘机工作的顺序流程图
Page
4
PLC的外部接线图
Page 5
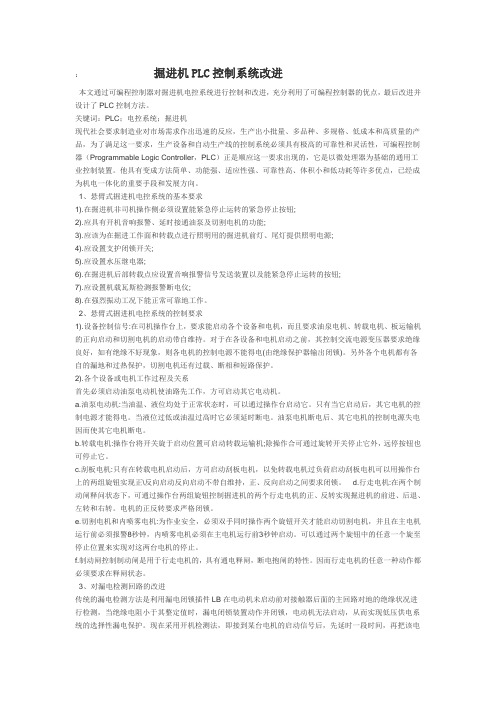
I/O分配表
输入 0.00 0.01 启动SQ1开关 停止SQ3开关 输出 100.00 100.01 100.02 100.03 100.04 100.05 100.06 100.07 控制挖掘机左轮前进 控制挖掘机左轮后退 控制挖掘机主臂抬起 控制挖掘机主臂下降 控制挖掘机主臂左转 控制挖掘机主臂右转 控制挖掘机右轮前进 控制挖掘机右轮后退
主臂左转连接
Page
15
挖掘机运行过程中模拟的动画界面
挖掘机实体与仿真动作一致
动态演示
Page
16
设计小结
由于挖掘机动作的精度无法精准的控制,再加上实际 测量的误差,现实模型和组态监控画面并不能达到完全一 致,但经过不断的运行调试,挖掘机模型基本能实现PLC 手动控制及顺序自动控制挖掘机动作过程并通过上位计算 机监控组态画面的目标,满足了设计任务书的要求。
Page
11
绘制静态画面
静态画面 图中出现三个挖掘机 的车身和四个主臂,但在 动画连接时是顺次出现, 当一个显示时,其他的均 被设置为隐含,具体的设 置见动画连接部分。 组态王中的静态画面 主要是通过工具箱绘制的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
挖掘机控制系统的PLC控制工学部工学一部专业自动化班级 4418501 学号 200413185018 姓名刘聪指导教师李姣负责教师李姣沈阳航空工业学院北方科技学院2008年7月沈阳航空工业学院北方科技学院毕业设计,论文,摘要随着我国经济的高速发展,大规模土木工程建设越来越多,这就需要大量的土石方施工机械为其服务,而挖掘机作为土石方施工机械的一种, 显得越来越重要。
本系统就是通过PLC实现挖掘机实物教学模型控制。
本文在介绍挖掘机的工作原理的基础上,采用PLC对下位机进行控制,包括硬件和软件的设计,实现了挖掘机的自动和手动控制,使挖掘机能够完成预先设计好的动作,提高工作效率,节约成本,把人从枯燥的工作中解放出来。
在此设计的基础上,本文采用了组态王6.52对挖掘机控制系统进行上位端设计,使操作人员对挖掘机进行远程监控,远离危险区域,避免在危险区域中施工造成不必要的人员伤亡。
最后本系统采取了相应的抗干扰措施,提高了系统的工作稳定性,使挖掘机达到了较为理想的控制效果。
关键词:挖掘机;组态王;PLCI沈阳航空工业学院北方科技学院毕业设计,论文,AbstractWith the rapid developmant of china economic,more and more large-scale civil engineering construction, requires a large amount of earthand stone for construction machinery.And excavators and construction machinery as a kind of earth is becoming increasingly important.The system is to achieve excavator kind of teaching model control by PLC.Based on the principle of the work on excavators, on the basis of a PLC which including hardware and software design for the next crew to control, the excavator achieves the automatic and manual control so that the excavators complete pre-designed actions to improve Efficiency,and to cost savings.The human will liberated from the boring work.In this design on the basis of this paper,the Kingview 6.52 pair of excavators top-control system was designed to enable operators of excavators to remot monitoring,to stay away from dangerous areas,and to avoid the dangerous region in the construction of unnecessary staffCasualties.Finally this system to take the corresponding anti-jamming measures to improve the stability of the system work so that the excavator will control the effects more perfectly than before.Keywords: excavator;king view;PLCII沈阳航空工业学院北方科技学院毕业设计,论文,目录1 绪论 ..................................................................... ...................................................... 1 1.1 课题的背景 ..................................................................... (1)1.1.1 挖掘机的发展及应用 ..................................................................... .. (1)1.1.2 挖掘机的现状及动向 ..................................................................... .. (1)1.1.3 挖掘机的分类 ..................................................................... .. (2)1.1.4 PLC的发展及应用 ..................................................................... ...................... 2 1.2 课题的目的和意义 ..................................................................... ............................ 4 1.3 课题研究的主要内容 ..................................................................... ........................ 4 2 挖掘机控制系统的硬件设计 ..................................................................... .................. 5 2.1 系统的工作原理 ..................................................................... ................................ 5 2.2 硬件设计的理论基础 ..................................................................... (5)2.2.1 PLC的工作原理 ..................................................................... .. (5)2.2.2 直流电机的工作原理 ..................................................................... ................. 7 2.3 PLC的选型 ..................................................................... ........................................ 8 2.4系统的资源分配 ..................................................................... ................................. 9 2.5 系统的外部接线图 ..................................................................... .......................... 10 2.6 硬件的抗干扰措施 ..................................................................... .......................... 10 3 挖掘机控制系统的软件设计 ..................................................................... ................ 12 3.1 PLC编程语言的概述 ..................................................................... .. (12)3.2 挖掘机控制系统程序的设计...................................................................... . (13)3.2.1自动控制的设计 ..................................................................... (13)3.2.2 手动控制的设计 ..................................................................... .. (22)3.3 软件的抗干扰措施 ..................................................................... ...................... 24 4 人机界面的设计 ..................................................................... ................................... 25 4.1 组态软件的介绍 ..................................................................... .............................. 25 4.2 挖掘机监控系统的创建过程...................................................................... . (26)4.2.1 挖掘机监控系统设备的连接 ..................................................................... . (26)III沈阳航空工业学院北方科技学院毕业设计,论文,4.2.2 挖掘机监控系统数据变量的设计 (27)4.2.3 图形画面的制作及动画连接 ..................................................................... . (30)4.2.4 挖掘机监控系统的脚本程序 ..................................................................... . (34)5 挖掘机控制系统的调试 ..................................................................... ....................... 365.1 硬件和软件的调试 ..................................................................... .......................... 36 5.2组态监控软件和下位机的调试 ..................................................................... .. (36).................................................................... ......................................................... 38 结论致谢 ..................................................................... .. (39)参考文献 ..................................................................... .. (40)IV沈阳航空工业学院北方科技学院毕业设计,论文,1 绪论1.1 课题的背景1.1.1 挖掘机的发展及应用挖掘机是用来开挖土壤的施工机械,主要用于工程建设,如:公路、桥梁、建筑、养殖池、地下工程、抢险开挖等等,挖掘机主要特点是力气大,效率高,能完成人力所不能完成的工程,提高工作效率。