关于不同类型缓和曲线的判断及起点、终点曲率半径的计算方法
缓和曲线各参数计算公式
用回旋线(放射螺旋型)作为缓和曲线。
回旋线是一种曲率随曲线长度成比例变化的曲线,不仅可以使线形更加美观,而且与驾驶员匀速转动方向盘由圆曲线驶入直线或者由直线驶入圆曲线的轨迹线相符合。
其基本公式为:rl=A2;
其中:r—回旋线上某点曲率半径(m);
l—回旋线上其点到原点的曲线长(m);
A—回旋线参数;
由于rl是长度的二次方,故令C=A2,A表征曲率变化的缓急程度,因此在缓和曲线上,r随l的变化而变化,在缓和曲线的终点处,l=L s,r=R,RLs=A2,即A=√(RLs);
其中:R—回旋线所连接的圆曲线半径;
Ls—回旋线形的缓和曲线长度。
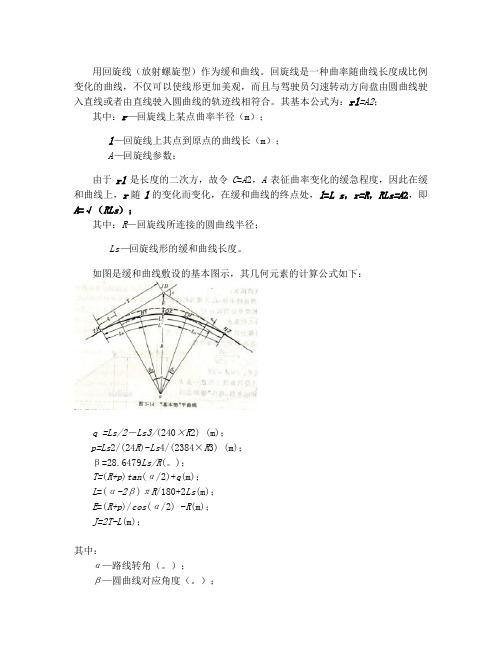
如图是缓和曲线敷设的基本图示,其几何元素的计算公式如下:
q =Ls/2-Ls3/(240×R2) (m);
p=Ls2/(24R)-Ls4/(2384×R3) (m);
β=28.6479Ls/R(。
);
T=(R+p)tan(α/2)+q(m);
L=(α-2β)πR/180+2Ls(m);
E=(R+p)/cos(α/2) -R(m);
J=2T-L(m);
其中:
α—路线转角(。
);
β—圆曲线对应角度(。
);
q—偏移值(m);
p—原曲线与直线偏移值(m);
T—切线长(m);
E—外移值(m);
J—里程差(m);
[式中α为路线设计参数,R值对于设计道路可查相关规范]。
非完整缓和曲线起始点曲率半径问题

非完整缓和曲线起始点曲率半径问题
一、是否为非完整缓和曲线?
用A^2=R*Ls公式来验证
A为已知缓和曲线参数;
R为缓和曲线所接圆曲线的半径;
Ls为已知该段缓和曲线的长度;
当等式成立即为完整缓和曲线,否则即为非完整缓和曲线;
二、非完整缓和曲线起始点曲率半径计算(起点与终点计算方法相同):
1、计算第一线元终点对应的完整缓和曲线长度:
L=A^2/R
2、计算对应的第一线元完整缓和曲线舍弃段的长度L1:
L1=L-L S
3、计算得出第一线元缓和曲线(非完整)起点曲率半径R1:
R1=A^2/L1
A为已知缓和曲线参数;
R为已知缓和曲线所接圆曲线的半径;
Ls为已知该段缓和曲线的长度;
L为计算该段完整缓和曲线的长度;
L1该段完整缓和曲线舍弃段的长度;
R1第一线元缓和曲线起点(非完整)曲率半径。
缓和曲线圆曲线计算公式

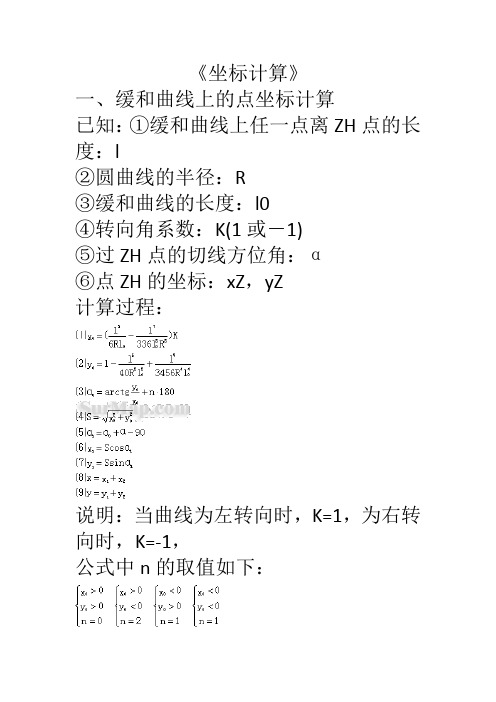
缓和曲线、竖曲线、圆曲线、匝道(计算公式)一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”) 求:①线路匝道上点的坐标:xy②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x0时sgn(x)=1,当x=0时sgn(x)=0。
缓和曲线的计算方法三种课件

b0
20
ls 3R
此外还有极坐标法、弦线支距法、长弦偏角 法。
缓和曲线的计算方法三种
要注意:点是位于缓和曲线上,还是位于圆曲线上。
位于缓和曲线
位于圆曲线
缓和曲线的计算方法三种
(1)当点位于缓和曲线上,有:
x y
l l5
40
R
2
l
2 s
l3 l7 6 Rl s 336 R
3l
3 s
(2)当点位于圆曲线上,有:
xRsinq yR(1c os)p
缓和曲线的计算方法三种
2、偏角法(整桩距、短弦偏角法) 要注意:点是位于缓和曲线,还是位于圆曲线。
位于圆曲线 位于缓和曲线
缓和曲线的计算方法三种
2、偏角法(整桩距、短弦偏角法)
(1)当点位于缓和曲线上,有:
总偏(常 角量 )0 6lR s
偏角
l2 ls2
0
距离:用曲线长l来代替弦长。放样出第1点后, 放样第2点时,用偏角和距离l交会得到。
缓和曲线的计算方法三种
(2)当点位于圆曲线上
方法:架仪HY (或YH),后视ZH(或HZ),拨角b0,即找 到了切线方向,再按单圆曲线偏角法进行。
缓和曲线的计算方法三种
(2)测设方法。(见例题)
例题:如图,设某公路的交点桩号为K0+518.66,右 转角αy=180018'36",圆曲线半径R=100m,缓和曲 线长ls=10m,试测设主点桩。(作为实习课内容)
解:(一)计算测设元素
p=0.04m;q=5.00m;
02lR s 1800205153
缓和曲线的计算方法三种
2、回旋缓和曲线(spiral curve)基本公式
圆曲线、缓和曲线计算方法

● 圆曲线方法一:sin (1cos )180i i i i i i x R y R l R ϕϕϕπ⎧⎪=⎪=-⎨⎪︒⎪=⋅⎩——i l 为待定点i P 至起点间的弧长i ϕ为i l 所对的圆心角R 为曲线半径方法二:11802l A R π︒=⋅⋅ 2sin l R A =⋅00cos(/)sin(/)x x l A y y l A =+⋅+-⎧⎨=+⋅+-⎩起点方位角左减右加起点方位角左减右加——00(,)x y 为圆曲线起点坐标方法三:180l A R π︒=⋅ 00cos(/)sin(/)x x R B A y y R B A =+⋅+-⎧⎨=+⋅+-⎩——l 为圆曲线上任意一点距起点距离00(,)x y 为圆曲线圆心坐标B 为圆心到圆曲线起点的方位角,A 为任意点对应的圆心角● 缓和曲线522030406l x l R l ly Rl ⎧=-⎪⎪⎨⎪=⎪⎩——l 为曲线上任一点至起点的曲线长R 曲线半径0l 为缓和曲线全长圆曲线、缓和曲线计算方法1、直线段:先由JD1以及JD2的坐标算出JD1到JD2的方位角,即直线段方位角A ,故可算出HZ 、ZH 坐标及其直线段各点坐标。
2、缓和曲线:以HZ 、ZH 为起点,缓和曲线上任意一点离HZ 、ZH 距离为l ,利用公式522003040()6l x l R l l R ly Rl ⎧=-⎪⎪⎨⎪=⎪⎩为缓和曲线全长,为圆曲线半径算出该点的相对起点坐标,利用arctan y x算出该点相对起点的方位角B ,再根据线路走向及直线段方位角可算出该点的方位角C (顺时针加,逆时针减),用可求出该点相对起点的距离D ,最后用00cos sin x x D C y y D C =+⎧⎨=+⎩可求出该点的坐标。
(00(,)x y 为缓和曲线起点的坐标)3、圆曲线:用上述方法求出圆曲线两端点HY 、YH 坐标,算出HY 到YH 的方位角F ,以及两点间的距离E ,用12arccos ER可算出两端点连线与起点到圆心连线的夹角G ,根据线路走向求出起点到圆心的方位角H (H=F+/-G ),00(,)x y 圆曲线为起点坐标,根据00cos sin x x R H y y R H=+⎧⎨=+⎩,求出圆心坐标。
公路缓和曲线原理及缓和曲线计算公式

一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。
1.缓和曲线的作用1)便于驾驶员操纵方向盘2)乘客的舒适与稳定,减小离心力变化3)满足超高、加宽缓和段的过渡,利于平稳行车4)与圆曲线配合得当,增加线形美观2.缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。
S=A2/ρ(A:与汽车有关的参数)ρ=C/sC=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3.回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R,l h=s 则 l h=A2/R4.缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ρ,a s=Δa/t≤0.62)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s)3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
发布日期:2012-01-31 作者:李秋生浏览次数:1494)从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5.直角坐标及要素计算1)回旋线切线角(1)缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
缓和曲线)计算公式

高速公路的线路(缓和曲线)计算公式一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:x Z,y Z计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反x Z,y Z为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:x Z,y Z计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反x Z,y Z为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:S Z④变坡点高程:H Z⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y ②待求点的切线方位角:αT计算过程:。
缓和曲线曲率半径 的计算
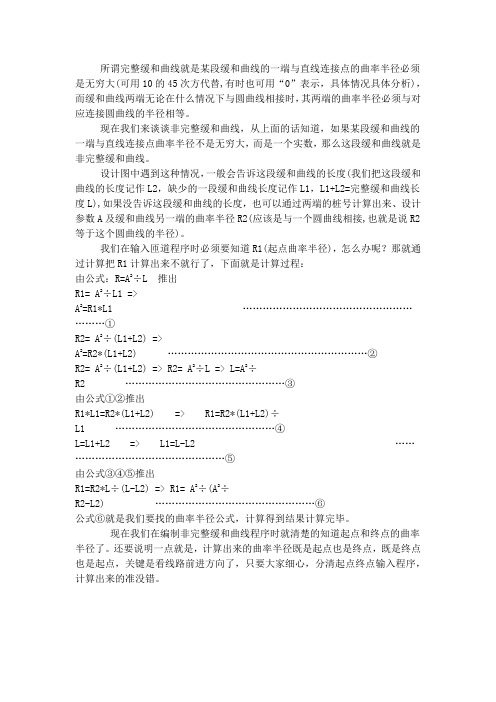
所谓完整缓和曲线就是某段缓和曲线的一端与直线连接点的曲率半径必须是无穷大(可用10的45次方代替,有时也可用“0”表示,具体情况具体分析),而缓和曲线两端无论在什么情况下与圆曲线相接时,其两端的曲率半径必须与对应连接圆曲线的半径相等。
现在我们来谈谈非完整缓和曲线,从上面的话知道,如果某段缓和曲线的一端与直线连接点曲率半径不是无穷大,而是一个实数,那么这段缓和曲线就是非完整缓和曲线。
设计图中遇到这种情况,一般会告诉这段缓和曲线的长度(我们把这段缓和曲线的长度记作L2,缺少的一段缓和曲线长度记作L1,L1+L2=完整缓和曲线长度L),如果没告诉这段缓和曲线的长度,也可以通过两端的桩号计算出来、设计参数A及缓和曲线另一端的曲率半径R2(应该是与一个圆曲线相接,也就是说R2等于这个圆曲线的半径)。
我们在输入匝道程序时必须要知道R1(起点曲率半径),怎么办呢?那就通过计算把R1计算出来不就行了,下面就是计算过程:由公式:R=A2÷L 推出R1= A2÷L1 =>A2=R1*L1 ……………………………………………………①R2= A2÷(L1+L2) =>A2=R2*(L1+L2) ……………………………………………………②R2= A2÷(L1+L2) => R2= A2÷L => L=A2÷R2 …………………………………………③由公式①②推出R1*L1=R2*(L1+L2) => R1=R2*(L1+L2)÷L1 …………………………………………④L=L1+L2 => L1=L-L2 ……………………………………………⑤由公式③④⑤推出R1=R2*L÷(L-L2) => R1= A2÷(A2÷R2-L2) …………………………………………⑥公式⑥就是我们要找的曲率半径公式,计算得到结果计算完毕。
公路缓和曲线计算公式讲解

公路缓和曲线计算公式讲解公路缓和曲线是指在设计公路线形时为了使车辆在曲线上能够顺利转弯而采用的一种曲线形式。
在公路设计中,缓和曲线的设计是非常重要的,因为它直接关系到车辆在曲线上的安全行驶和舒适性。
在本文中,我们将对公路缓和曲线的计算公式进行详细的讲解,希望能够帮助大家更好地理解和应用这一知识。
一、缓和曲线的类型。
在公路设计中,常见的缓和曲线类型有三种,分别是圆曲线、过渡曲线和螺旋曲线。
圆曲线是一种由圆弧组成的曲线形式,它的曲率是恒定的。
过渡曲线是一种由直线段和圆弧段组成的曲线形式,它的曲率是逐渐变化的。
螺旋曲线是一种由圆弧和直线段交替组成的曲线形式,它的曲率也是逐渐变化的。
在实际的公路设计中,我们需要根据具体的情况选择合适的缓和曲线类型,以确保车辆在曲线上的安全行驶和舒适性。
二、缓和曲线的计算公式。
1. 圆曲线的计算公式。
在公路设计中,圆曲线的计算是非常常见的。
圆曲线的计算公式如下:L = (V^2) / (127R)。
其中,L表示圆曲线的长度(单位,米),V表示车辆的设计速度(单位,公里/小时),R表示圆曲线的半径(单位,米)。
根据这个公式,我们可以计算出圆曲线的长度,从而确定圆曲线的位置和形状。
2. 过渡曲线的计算公式。
过渡曲线是一种由直线段和圆弧段组成的曲线形式,它的计算公式如下:L = (V^2) / (a)。
其中,L表示过渡曲线的长度(单位,米),V表示车辆的设计速度(单位,公里/小时),a表示过渡曲线的加速度(单位,米/秒^2)。
根据这个公式,我们可以计算出过渡曲线的长度,从而确定过渡曲线的位置和形状。
3. 螺旋曲线的计算公式。
螺旋曲线是一种由圆弧和直线段交替组成的曲线形式,它的计算公式比较复杂。
螺旋曲线的计算需要考虑曲线的曲率变化和车辆的行驶轨迹,因此通常需要借助计算机软件来进行精确计算。
三、缓和曲线的设计原则。
在公路设计中,缓和曲线的设计需要遵循一些基本原则,以确保车辆在曲线上的安全行驶和舒适性。
公路工程测量放线圆曲线、缓和曲线(完整缓和曲线、非完整缓和曲线)计算解析
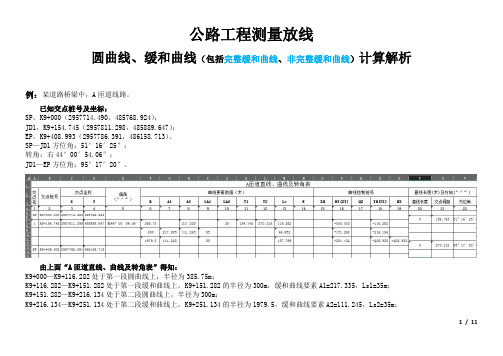
公路工程测量放线圆曲线、缓和曲线(包括完整缓和曲线、非完整缓和曲线)计算解析例:某道路桥梁中,A匝道线路。
已知交点桩号及坐标:SP,K9+000(2957714.490,485768.924);JD1,K9+154.745(2957811.298,485889.647);EP,K9+408.993(2957786.391,486158.713)。
SP—JD1方位角:51°16′25″;转角:右44°00′54.06″;JD1—EP方位角:95°17′20″。
由上面“A匝道直线、曲线及转角表”得知:K9+000—K9+116.282处于第一段圆曲线上,半径为385.75m;K9+116.282—K9+151.282处于第一段缓和曲线上,K9+151.282的半径为300m,缓和曲线要素A1=217.335,Ls1=35m;K9+151.282—K9+216.134处于第二段圆曲线上,半径为300m;K9+216.134—K9+251.134处于第二段缓和曲线上,K9+251.134的半径为1979.5,缓和曲线要素A2=111.245,Ls2=35m;1 / 11K9+251.134—K9+408.933处于第三段圆曲线上,半径为1979.5m。
求:K9+130、K9+200、K9+230、K9+300的中桩坐标,切线方位角,左5米边桩的坐标,右10米边桩的坐标。
解:首先,我们知道要求一个未知点的坐标,必须知道起算点坐标,起算点至未知点的方位角,起算点至未知点的直线距离,然后利用坐标正算的计算公式,就可以直接求出未知点的坐标。
那么,关于圆曲线和缓和曲线(包括完整缓和曲线和非完整缓和曲线)的计算,我们需要知道如何求出起算点至圆曲线或缓和曲线上某点的方位角和直线距离。
下面,先列出关于圆曲线和缓和曲线中角度和距离计算的相关公式。
2 / 113 / 11y 轴。
过圆曲线上任意点P 的切线与ZY —JD 相交,夹角(切线角)为β,ZY —P 与ZY —JD 的夹角(弦切角)为α,ZY —P 的弧长为L ,ZY —P 的直线距离为d ,圆曲线的半径为R 。
公路缓和曲线段原理及缓和曲线计算公式

公路缓和曲线段原理及缓和曲线计算公式一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。
1.缓和曲线的作用1)便于驾驶员操纵方向盘2)乘客的舒适与稳定,减小离心力变化3)满足超高、加宽缓和段的过渡,利于平稳行车4)与圆曲线配合得当,增加线形美观2.缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。
S=A2/ρ(A:与汽车有关的参数)ρ=C/sC=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3.回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R,l h=s 则 l h=A2/R4.缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ρ,a s=Δa/t≤0.62)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s)3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4)从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5.直角坐标及要素计算1)回旋线切线角(1)缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
缓和曲线

缓和曲线:曲线上任意点P 的曲率半径ρ与该点至原点ZH 的曲线长l 成反比,曲线方程为:ρ=A 2l (1-1) 式中,A 为缓和曲线参数。
缓和曲线终点HY 的曲线长为L hy ,曲率半径为R ,带入(1-1)公式可求得缓和曲线参数为:A =√RL hy (1-2)基本型平曲线由“第一缓和曲线+圆曲线+第二缓和曲线”组成。
其中第一缓和曲线的起点半径ρZH =∞,终点半径ρHY =R;第二缓和曲线的起点半径ρYH =R,终点半径ρHZ =∞.在上图所示切线之距坐标系x ′ZHy ′中,设缓和曲线上任意点P 的曲率半径为ρ,曲率半径ρ偏离纵轴y'的偏角为β(P 点的计算偏角),微分弧长dl ,则缓和曲线的微分方程为ρ= dl dβ (1-3) 代入(1-1)得dβ=dl ρ=l A 2dl (1-4)对上式进行积分得 β=l 22A 2 (1-5)在HY 点,l =L 1,再利用(1-2)公式得β=L 12R (1-6)设缓和曲线任意点P的切线支距坐标为x',y',则微分弧长dl在切线支距坐标系x′ZHy′的x'与y'轴的投影微分长度为dx′=dl cosβdy′=dl sinβ(1-7)代入(1-3)得dx′=ρcosβdβdy′=ρsinβ dβ(1-8)由(1-5)求得l=A√2β,再代入(1-1)公式得ρ=√2β(1-9)则dx′=√2βcosβdβdy′=√2βsinβ dβ(1-10)对上式进行积分,得到以偏角β为自变量的切线支距坐标积分公式:x′=A√2∫cosβ√ββdβy′=A√2∫sinβ√ββQdβ将其变换为以线长l为自变量的切线支距坐标积分公式:x′=∫cosl2 2A2ld ly′=∫sinl2 2A2lQd l(2)圆曲线内移值与切线增量公式在直线与圆曲线之间插入缓和曲线时,在第一缓和曲线端,应将原有圆曲线向内移动距离p1才能使圆曲线与第一缓和曲线链接,切线增长了距离q1,称p1为圆曲线内移值,q1为切线增量;第二缓和曲线端的内移值为p2,切线增量为q2。
缓和曲线

缓和曲线一、作用线形缓和、行车缓和、超高加宽缓和、离心加速度逐渐变化。
通过曲率的变化,适应汽车转向操作的行驶轨迹及路线的顺畅,便于车辆遵循;离心加速度逐渐变化,不致产生侧向冲击力,乘客感觉舒适;超高横坡度逐渐变化,减少行车振荡,使行车更加平稳;与圆曲线配合得当,线形连续光滑,构成美观与视觉协调的最佳线形。
二、基本公式缓和曲线采用回旋线:2A r l ⋅=三、几何要素曲率半径:r =回旋线长:2A s l r ==圆曲线夹角:222A 2s sl l rβ==P 点坐标:(x ,y )P 点曲率圆的内移值:cos p y r r β=+- P 点弦偏角:arctan 3y x βδ=≈ P 点弦长:()a sin /3y β=长切线长T L :L T cos x y β=- 短切线长T K :K T sin y β=四、最小长度(1)按离心加速度变化率3min 47sV L R α=(2)操作反应时间13.6s L V t =⋅(t=3~5) (3)满足超高缓和段要求is B L P∆= (4)美观要求:R/9~R各级公路缓和曲线最小长度城市道路缓和曲线最小长度五、缓和曲线计算设计速度V/(km/h) 120 100 80 60 40 30 20 缓和曲线最小长度/m 100 85 70 60 40 30 20设计速度V/(km/h) 80 60 50 40 30 20 缓和曲线最小长度/m 70 50 45 35 2520(1)确定s l按第四点确定 (2)计算主要参数32()2240S S l l q m R =- 243()242688S S l l p m R R =-028.6479()SL Rβ=度 ()()2S T R p tgq m α=++0(2)2()180S S L R l m παβ=-+ 0(2)180y L R παβ=- ()sec()2S E R p R m α=+-2()S S S D T L m =-(3)桩号确定课本公式: ZH 桩号=JD 桩号-Ts HY 桩号=ZH 桩号+ls YH 桩号=HY 桩号+Ly HZ 桩号=YH 桩号+ls QZ 桩号=HZ 桩号-Ls/2 JD 桩号=QZ 桩号+Ds/2其他公式 ZH 桩号=JD 桩号-Ts HY 桩号=ZH 桩号+ls HZ 桩号=YH 桩号+ Ls-ls YH 桩号=HY 桩号-ls QZ 桩号=YH 桩号-Ls/2+ls JD 桩号=QZ 桩号+Ds/2六、习题平原区某高速公路有一弯道,其形式为直线-缓和曲线-圆曲线-缓和曲线-直线,其中两端缓和曲线长度相同,圆曲线半径R=250m ,交点JD 桩为K17+568.38,转角38o 30’00’’,计算行车速度为80km/h ,使计算该平曲线的5个基本桩号。
缓和曲线知识与计算公式
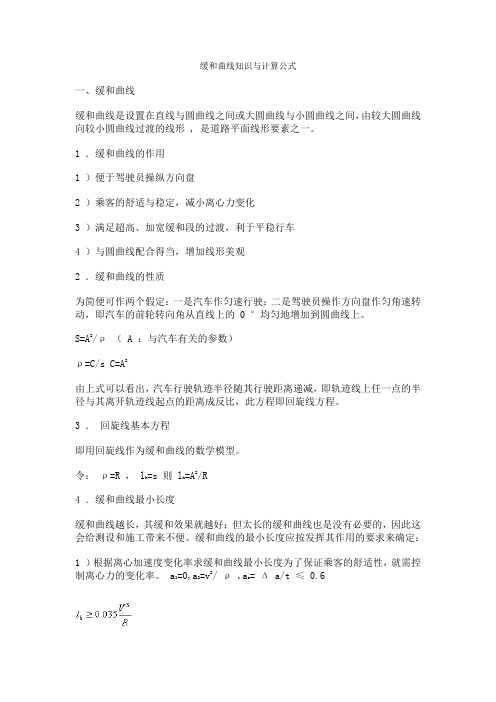
缓和曲线知识与计算公式一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形 , 是道路平面线形要素之一。
1 .缓和曲线的作用1 )便于驾驶员操纵方向盘2 )乘客的舒适与稳定,减小离心力变化3 )满足超高、加宽缓和段的过渡,利于平稳行车4 )与圆曲线配合得当,增加线形美观2 .缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0 °均匀地增加到圆曲线上。
S=A2/ρ( A :与汽车有关的参数)ρ=C/s C=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3 .回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R , lh =s 则 lh=A2/R4 .缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1 )根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ ρ ,as= Δ a/t ≤ 0.62 )依驾驶员操纵方向盘所需时间求缓和曲线长度 (t=3s)3 )根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4 )从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3° ——29° 之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5 .直角坐标及要素计算1 )回旋线切线角( 1 )缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
曲线及缓和曲线计算公式
《坐标计算》一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:。
缓和曲线的概念

缓和曲线的概念一、引言缓和曲线是道路工程中的基本概念之一,其作用是使道路在水平和垂直方向上的曲率变化平滑,从而提高行车舒适性和安全性。
本文将从定义、分类、设计原则、计算方法以及实际应用等方面进行详细阐述。
二、定义缓和曲线是指在两条直线或两条曲线相接处,为了使车辆行驶方便、安全而设计的一段过渡曲线。
其作用是通过逐渐增加或减少曲率的方式,将两段不同半径或不同方向的道路连接起来。
缓和曲线可以分为水平缓和曲线和垂直缓和曲线两种类型。
三、分类1. 水平缓和曲线:指在水平方向上连接两条不同半径的圆弧或直线段之间的过渡段。
2. 垂直缓和曲线:指在垂直方向上连接两条不同坡度的道路之间的过渡段。
根据坡度变化形式可分为三种类型:圆形垂直缓和曲线、抛物线垂直缓和曲线以及倒梯形垂直缓和曲线。
四、设计原则缓和曲线的设计应遵循以下原则:1. 平滑性原则:缓和曲线应该是平滑的,不应有急转弯或急变坡,以确保行车舒适性和安全性。
2. 安全性原则:缓和曲线的半径应根据车速、车型、路况等因素确定,以确保行车安全。
3. 经济性原则:缓和曲线的设计应当考虑工程成本,尽可能节约材料和人力资源。
4. 美观性原则:缓和曲线的设计应当符合美学要求,与周围环境相协调,营造出美观的道路景观。
五、计算方法1. 水平缓和曲线计算方法:(1)根据道路设计速度确定水平曲率半径;(2)计算过渡长度L=K*R,其中K为过渡曲率系数,一般取0.06~0.08;(3)计算过渡段两端点处的切线方向角,并将其与前后道路段的方向角相比较,确定过渡段两端点处的转角;(4)根据转角大小确定过渡段内部各点处的切线方向角。
2. 垂直缓和曲线计算方法:(1)根据前后道路的坡度及设计速度确定过渡段长度L;(2)根据过渡段长度L和坡度变化形式,确定垂直曲率半径R;(3)计算出过渡段两端点处的高程值,并将其与前后道路段的高程值相比较,确定过渡段两端点处的转角;(4)根据转角大小确定过渡段内部各点处的高程值。
平曲线认识
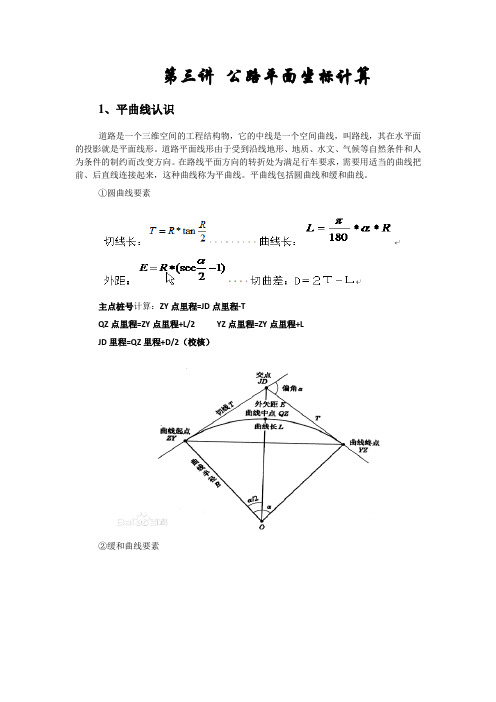
第三讲公路平面坐标计算1、平曲线认识道路是一个三维空间的工程结构物,它的中线是一个空间曲线,叫路线,其在水平面的投影就是平面线形。
道路平面线形由于受到沿线地形、地质、水文、气候等自然条件和人为条件的制约而改变方向。
在路线平面方向的转折处为满足行车要求,需要用适当的曲线把前、后直线连接起来,这种曲线称为平曲线。
平曲线包括圆曲线和缓和曲线。
①圆曲线要素主点桩号计算:ZY点里程=JD点里程-TQZ点里程=ZY点里程+L/2 YZ点里程=ZY点里程+LJD里程=QZ里程+D/2(校核)②缓和曲线要素切线长: 外距:曲线长:()s s 18022180l aR l a R L h +=+-=πβπ切线加长:q =/2-3/(240R2)圆曲线相对切线内移量:p = 2/(24R)切曲差 Dh = 2T -Lh上式中:α 为线路转向角;β0为缓和曲线角; 其中q 、p 、β0缓和曲线参数。
ZH 桩号 = JD 桩号-T HY 桩号 = ZH 桩号+QZ 桩号 = HY 桩号+L/2YH 桩号 = QZ 桩号+L/2 = HY 桩号+L = ZH 桩号++LHZ 桩号 = YH 桩号+= ZH 桩号+LhJD 桩号 = ZY 桩号-Th +Dh (检核)m)2)((q tgp R T ++=α)(m 2sec)(R p R E -+=αLs Ls Ls Ls Ls Ls注意:上面计算需要大家掌握主点桩号计算,五大主点:ZH、HY、QZ、YH、HZ,还会遇到一些特殊点例如起点QD、终点ZD、公切点GQ。
可以判断下图即可。
重点知识必须掌握(线元法基础):直线:曲率为0,起终点半径无穷大。
圆曲线:具有一定曲率半径的圆弧,半径为固定值。
缓和曲线:在直线与圆曲线之间或两个不同半径的圆曲线之间设置的曲率连续变化的曲线(指从直线上半径无穷大到圆曲线的定值之间曲率半径逐渐变化的过渡段),我国公路缓和曲线的形式采用回旋线。
(曲率为半径的倒数)A1,A2——缓和曲线参数R——圆曲线半径Ls1,Ls2——缓和曲线长度一段完整缓和曲线满足公式:A²=R x Ls1,A²=R x Ls2入缓和曲线:从ZH点到HY点,A固定不变,随着Ls1的增大,半径从∞减小到R出缓和曲线:从YH点到HZ点,A固定不变,随着Ls2的减小,半径从R增大到∞如果A²≠R x Ls,那么这段缓和曲线是不完整的,叫做不完整缓和曲线。
公路缓和曲线段原理及缓和曲线计算公式
公路缓和曲线段原理及缓和曲线计算公式一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。
1.缓和曲线的作用1)便于驾驶员操纵方向盘2)乘客的舒适与稳定,减小离心力变化3)满足超高、加宽缓和段的过渡,利于平稳行车4)与圆曲线配合得当,增加线形美观2.缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。
S=A2/ρ(A:与汽车有关的参数)ρ=C/sC=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3.回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R,l h=s 则 l h=A2/R4.缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ρ,a s2)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s)3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4)从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5.直角坐标及要素计算1)回旋线切线角(1)缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
βx=s2/2Rl h(2)缓和曲线的总切线角β=l h2)缓和曲线直角坐标任意一点P处取一微分弧段ds,其所对应的中心角为dβxdx=dscosβxdy=dssinβx3)缓和曲线常数(1)主曲线的内移值p及切线增长值q内移值:p=Y h-R(1-cosβh)=l h2/24R切线增长值:q=X h-Rsinβh=l h/2-lh3/240R2(2)缓和曲线的总偏角及总弦长总偏角:βh=l h/2R总弦长:C h=l h-l h3/90R2O为圆曲线的圆心,圆曲线所对圆心角(等于公路偏角)。
关于不同类型缓和曲线的判断及起点终点曲率半径的计算方法

目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。
关于这点,相关的课本教材上没有明确的讲述,网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。
第一:先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈.1.当对于单独一段缓和曲线从其完整与否来讲是分为完整与不完整两类;当对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言)又有对称缓和曲线与不对称缓和曲线之分。
由此看来,完整与对称与否是针对缓和曲线两个方面来看待区分的。
2.缓和曲线我们的测量教材上讲述的其实就是完整缓和曲线,也可以知道缓和曲线上:各个点的半径是不同的,起点到终点的半径值过度是从正无穷大到所接圆曲线半径之过度如从ZH向HY方向;或者是从所接圆曲线半径值向正无穷大过度的,如从YH向HZ方向。
那么由此可以不难判断出来,完整缓和曲线就是符合上述特征的,那么不完整的缓和曲线就是不符合上述特征的,但是线路上的平曲线设计时候一般缓和曲线不单独存在的,整体上缓和曲线前或后一般都是要连接一个圆曲线的,那么不完整缓和曲线其实就是在完整缓和曲线上截取的一段,一般就是去掉了半径无穷大的那端而是从某个点开始的半径值向所接圆曲线半径值过度的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。
关于这点,相关的课本教材上没有明确的讲述,网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。
第一:先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈.1.当对于单独一段缓和曲线从其完整与否来讲是分为完整与不完整两类;当对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言)又有对称缓和曲线与不对称缓和曲线之分。
由此看来,完整与对称与否是针对缓和曲线两个方面来看待区分的。
2.缓和曲线我们的测量教材上讲述的其实就是完整缓和曲线,也可以知道缓和曲线上:各个点的半径是不同的,起点到终点的半径值过度是从正无穷大到所接圆曲线半径之过度如从ZH向HY方向;或者是从所接圆曲线半径值向正无穷大过度的,如从YH向HZ方向。
那么由此可以不难判断出来,完整缓和曲线就是符合上述特征的,那么不完整的缓和曲线就是不符合上述特征的,但是线路上的平曲线设计时候一般缓和曲线不单独存在的,整体上缓和曲线前或后一般都是要连接一个圆曲线的,那么不完整缓和曲线其实就是在完整缓和曲线上截取的一段,一般就是去掉了半径无穷大的那端而是从某个点开始的半径值向所接圆曲线半径值过度的。
3.对称与不对称缓和曲线是相对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言),当两个缓和曲线长度相等时候则称之为对称缓和曲线,自然此时的切线长、缓和曲线参数A值都是相等的,反之不相等就称为不对称缓和曲线,自然切线长、缓和曲线是不相等的。
第二:由此可以看出对于缓和曲线而言,对称与否很容易分辨判断无需赘述,完整与否不易区分,也是这里重点要说的问题.1.完整与不完整缓和曲线的区别判断方法:综上所述,完整缓和曲线与不完整缓和曲线的判断其实就在于验证完整缓和曲线参数方程A^2=R*Ls这个等式成立与否就可。
(A为已知的缓和曲线参数,R为缓和曲线所接圆曲线的半径,Ls为该段缓和曲线的长度)理论上,当该式子成立时候,那就是完整缓和曲线无疑,当不成立时候那就可判断为不完整缓和曲线了。
实际工作操作时候验证方法如下:先把R* Ls的乘积进行开平方然后看所得到的结果是否与所提供的缓和曲线参数A值相等。
2.完整缓和曲线与不完整缓和曲线起点终点的曲率半径的判断与计算:线路设计上的缓和曲线一般不会单独存在的,连续的缓和曲线起点或终点必定有一端都是要接圆曲线的,那么缓和曲线一端的半径值必定就是圆曲线的半径值了,求半径的问题就变成只需求出另外一端半径就可以了.上面说过首先判断出该缓和曲线是否是完整的办法,那么当是完整缓和曲线时候,起点或终点两端的半径,必定一端是无穷大,一端就是圆曲线半径了;那么当判断是不完整缓和曲线时,一端半径就是圆曲线半径,另一端的半径就绝对不能是无穷大了的,理论上应该是该端点的半径值要小于无穷大而大于所接圆曲线的半径值,那么该怎么求出来呢?此时就牵涉到了不完整缓和曲线的参数方程:A^2=[(R大*R小)÷(R大-R小)]*Ls由上方程可以看出,R大就是我们所需要求的这端半径了,R小自然就是该不完整缓和曲线所接的圆曲线半径了。
A为该不完整缓和曲线参数,R小为所接圆曲线半径,Ls为该不完整缓和曲线的长度,这些图纸都提供的有了,只需按照上面的不完整缓和曲线的参数方程进行解方程就可得到另一端的半径值了,也就是R大=(A^ 2*R小)÷(A^2-R小*Ls)就可以的。
只要是正值那就OK了!!!2.很有必要再说说不完整缓和曲线中的一个特例------卵形曲线卵形曲线是不完整缓和曲线中的一种特殊情况,对于卵形曲线的定义是:两端同转向圆曲线中间所夹的那段同转向不完整缓和曲线就叫卵形曲线,也就是指那段缓和曲线前后各有个圆曲线相接,并且三段曲线的转向相同用上述判断复核是那么这段缓和曲线一般都是不完整的那么符合这样特征的就是卵形曲线,那么此时卵形曲线必定是符合不完整缓和曲线的参数方程的:A^2=[(R大*R小)÷(R大-R小)]*Ls那么此时卵形曲线的起点或终点这两端的半径就分别是所接两个圆曲线的半径值!也就是R大和R小.半径值就是无需求的,直接用卵形曲线所接前后两个圆曲线的半径值就可了.其实关于不完整缓和曲线一端半径求算方法这点,在夏夜的“轻松测量系统软件电脑版”的菜单上也就有这个工具,懒得列方程解算的,不妨直接用软件计算也可嘛,我上述只是讲述了下手工计算的方法.至此,对于缓和曲线的特征判断与半径计算应该有个清晰的眉目了吧,那么在使用程序计算线路坐标的时候,遇见缓和曲线就先判断是否完整,然后用上述方法很快就可判断到起点或终点的曲率半径了。
最后解释下,说曲率其实就是半径的倒数,程序中经常见到这个概念,千万不要把曲率和半径混为一谈导致程序计算错误了!以上所述是本人愚见,欢迎各位不吝赐教,共同学习交流,将课本理论与现实实践相结合,正确顺利使用线元法(积木法)坐标计算程序,为坐标计算做好数据准备,从而正确快速的计算出线路坐标,当然也欢迎测友与本人(点击顶部本人名字查看注册信息可找到)联系探讨,合作交流,共同进步!应用全站仪进行三角高程测量的新方法摘要:使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
经过长期摸索,总结出一种新的方法进行三角高程测量。
这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
关键词:全站仪三角高程测量新方法相关站中站:工程测量在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。
但精度较低,且每次测量都得量取仪器高,棱镜高。
麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
经过长期摸索,总结出一种新的方法进行三角高程测量。
这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法如图一所示,设A,B为地面上高度不同的两点。
已知A点高程HA,只要知道A 点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。
图一图中:D为A、B两点间的水平距离а为在A点观测B点时的垂直角i为测站点的仪器高,t为棱镜高HA为A点高程,HB为B点高程。
V为全站仪望远镜和棱镜之间的高差(V=Dtanа)首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则h AB=V+i-t故HB=HA+Dtanа+i-t (1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距离很短时,才比较准确。
当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:1、全站仪必须架设在已知高程点上2、要测出待测点的高程,必须量取仪器高和棱镜高。
二、三角高程测量的新方法如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。
如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。
首先由(1)式可知:HA=HB-(Dtanа+i-t) (2)上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。
但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。
从(2)可知:HA+i-t=HB-Dtanа=W(3)由(3)可知,基于上面的假设,HA+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。
这一新方法的操作过程如下:1、仪器任一置点,但所选点位要求能和已知高程点通视。
2、用仪器照准已知高程点,测出V的值,并算出W的值。
(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值。
施测前不必设定。
)3、将仪器测站点高程重新设定为W,仪器高和棱镜高设为0即可。
4、照准待测点测出其高程。
下面从理论上分析一下这种方法是否正确。
结合(1),(3)HB′=W+D′tanа′(4)HB′为待测点的高程W为测站中设定的测站点高程D′为测站点到待测点的水平距离а′为测站点到待测点的观测垂直角从(4)可知,不同待测点的高程随着测站点到其的水平距离或观测垂直角的变化而改变。
将(3)代入(4)可知:HB′=HA+i-t+D′tanа′(5)按三角高程测量原理可知HB′=W+D′tanа′+i′-t′(6)将(3)代入(6)可知:HB′=HA+i-t+D′tanа′+i′-t′ (7)这里i′,t′为0,所以:HB′=HA+i-t+D′tanа′(8)由(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。
也就是说我们采取这种方法进行三角高程测量是正确的。
综上所述:将全站仪任一置点,同时不量取仪器高,棱镜高。
仍然可以测出待测点的高程。
测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。
整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。