遥测数据处理软件
飞行器遥测数据处理方法的研究和开发
飞行器遥测数据处理方法的研究和开发第一章绪论随着航空航天工业的快速发展,飞行器的种类和数量不断增加,而飞行器的安全运行和科学探索离不开遥测技术的支持。
遥测数据处理方法是保障飞行器顺利运行和科学探索的关键技术之一,在飞行器设计和开发过程中发挥着重要的作用。
本文主要对飞行器遥测数据处理方法的研究和开发进行探讨和总结。
第二章遥测数据传输方法为了实现对飞行器的信息监测和控制,需要采集各种传感器获得的数据,将其转换为数字信号,并进行压缩、整合和传输。
目前常见的遥测数据传输方法包括有线传输和无线传输两种:2.1 有线传输有线传输是指通过对传感器的信号进行模数转换后,采用电缆、光缆等有线传输介质,将遥测数据传输到地面的数据接收设备。
有线传输具有传输速度快、传输质量稳定、噪声和干扰较小等优势。
但是,由于有线传输需要使用电缆或光缆等线材,因此在极端环境条件下,如高温、低温、电磁干扰等,有线传输容易出现故障,并且需要建立完善的传输线路,增加了工程成本。
2.2 无线传输无线传输是指将遥测数据通过无线信道直接传输到地面的接收设备,常用的传输介质包括微波、红外线、激光、卫星等。
无线传输具有克服传输距离限制、适应极端环境等优势。
但是,由于无线传输受到天气、电磁干扰、传输距离等因素的影响,因此传输质量不如有线传输稳定,传输速度也较慢。
第三章遥测数据处理方法无论是有线传输还是无线传输,采集到的遥测数据都需要进行处理和分析,才能使得数据更具有意义和价值。
在遥测数据处理过程中,目前主要应用的处理方法包括以下几种:3.1 实时处理实时处理是指将传感器采集到的数据实时进行数字信号处理,然后将处理后的结果通过数据传输系统传输到地面处理中心进行处理和分析。
实时处理主要用于对数据快速处理和响应,适用于快速采集、传输数据以及紧急控制等情况。
3.2 离线处理离线处理是指将传感器采集到的数据先存储起来,然后在后期进行批量处理。
离线处理主要用于对大量数据的处理与分析,适用于需要长时间进行数据积累和分析的需求。
python 归一化遥测解析
python 归一化遥测解析在遥测解析中,归一化是将原始数据转换为标准化范围的过程。
在Python中,归一化遥测解析是指利用Python编程语言来解析和处理遥测数据,并将数据进行归一化处理。
首先,我们需要明确遥测数据的含义。
遥测数据是指通过传感器或设备收集的实时数据,例如温度、湿度、压力等。
这些数据通常具有不同的范围和单位,而归一化可以将它们转换为统一的标准范围,以便更好地进行分析和比较。
在Python中,可以使用各种库和方法来实现归一化遥测解析。
一个常用的方法是使用scikit-learn库中的MinMaxScaler类。
该类可以将数据缩放到给定的最小值和最大值范围内。
我们可以通过以下步骤来进行归一化遥测解析:1. 导入必要的库:首先,我们需要导入scikit-learn库中的MinMaxScaler类和其他必要的库。
2. 准备数据:将收集到的遥测数据存储在一个数据集中,通常是一个二维数组或DataFrame对象。
3. 创建MinMaxScaler实例:使用MinMaxScaler类创建一个归一化器实例。
4. 拟合数据:使用fit方法将数据拟合到归一化器中。
这将计算出数据的最小值和最大值。
5. 转换数据:使用transform方法将数据转换为归一化后的版本。
这将使得数据的范围在指定的最小值和最大值之间。
下面是一个简单的示例代码:```from sklearn.preprocessing import MinMaxScaler# 准备数据telemetry_data = [[23.5, 45.2, 1023.6], [25.1, 42.8, 987.2], [21.8, 43.9, 1005.3]]# 创建MinMaxScaler实例scaler = MinMaxScaler()# 拟合数据scaler.fit(telemetry_data)# 转换数据normalized_data = scaler.transform(telemetry_data)print(normalized_data)```以上代码中,我们首先导入MinMaxScaler类,然后准备遥测数据。
遥测信息
遥测中将对象参量的近距离测量值传输至远距离的测量站来实现远距离测 量
目录
01 定义
03 建立研究中心
02 处理方法
遥测信息,是指在遥测中将对象参量的近距离测量值传输至远距离的测量站来实现远距离测量,其中的测量 值就是遥测信息。
定义
遥测信息,是指在遥测中将对象参量的近距离测量值传输至远距离的测量站来实现远距离测量,其中的测量 值就是遥测信息。
L频段传输信道和X频段传输信道采用符合CCSDS建议的AOS协议的处理方法。更进一步地,所述实时遥测信息 和其他低速遥感信息由所述L频段发射机一起向所述地球站传输;延时遥测信息和中分辨光谱成像仪的遥感信息由 所述X频段发射机一起向所述地球站传输。
建立研究中心
背景
研究方向
多年来,军用遥测系统一直处于封闭和半封闭状态。随着航天事业的逐步对外开放,遥测系统也逐步走向世界, 并与国际遥测标准接轨,遥测信息的交流日益增强。但由于历史原因,遥测研制和应用中所获取的大量信息,大多 封闭在局部环境中,而且遥测信息的利用率又非常之低。由于管理体制的原因,限制了横向的信息交流,致使遥测 信息资源不能得到有效的综合利用。因此造成了许多部门和单位之间的重复性和低水平的劳动。
为了解决以上技术问题,提供一种遥测信息处理方法,应用于中低轨卫星全球大容量遥测中,所述遥测信息 处理方法至少包括下列步骤:通过一遥测源对所有遥测信息统一采集、量化和格式编排;经不同副载波将所述遥 测源初步处理的遥测信息调制到不同的频段后,再分别通过相应的频段传输信道传输;以及由一地球站对所有频 段通道下传的遥测信息统一处理。其中,遥测源为一数据管理计算机;所有遥测信息包括实时遥测信息以及延时 遥测信息。
遥测信息研究中心是遥测事业向集团化发展的必然结果,它应该进行如下的研究工作.
遥测数据实时处理软件系统及其应用
和 U P通信相结合 的方式满足 了试 飞实时监控任 务的要求, 灵活运用视 图驱动程序 简化 了系统的扩展 与维护工作。整个 D 并
系统 操 作 简 单 、 行 稳定 可 靠 , 试 飞 实 时监 控 提 供 了重 要手 段 。 运 为
关键词
飞行试验
遥测 数据
实时处理 A
TPU P C/ D
程序 , 图 1 如 所示 。
前端服 务程 序运 行 于 服 务 器 上 , 要 完成 对 解 主 调后 的遥测 P M 数 据 进 行 采集 、 始 数 据存 盘 , C 原 根
据预先 提供 的带 头文件 完成 对 P M数 据 的取 位 、 C 拼
21 0 0年 7月 8 日收 到
图 1 系统组成与功能
⑥
2 1 SiT c. nn. 0 0 c. eh E gg
ห้องสมุดไป่ตู้
遥测数据实时处理软件 系统及其 应用
祁 春 段 宝元
( 国飞 行 试 验 研 究 院 , 安 70 8 ) 中 西 10 9
摘
要
介绍 了遥测数据 实时处理软件 系统的组成及 功能 , 并着 重阐述 了系统 的 网络通 信 与工 作流程 。该 系统采用 了 T P C
最直接 、 准确 、 终 的试验 手段 … , 有 技 术 综 合 最 最 具 性强 、 险性 大 、 资 大 、 期 长等 特 点 _ 。遥 测 数 风 耗 周 2 J
控 计算 机 , 视 图驱 动程 序 和 图形 显 示 程 序使 用 。 供
原 始数 据 存 盘 是 以逻 辑 数 据 帧 的形 式 保 存 在 本 地
磁盘上 , 其数据结构如 图 2 示 , 所 横排数 据称为子
SIROVISION岩体遥测和结构分析系统文字说明
SIROVISION岩体遥测和结构分析系统SIROVISION岩体遥测和结构分析系统是应用于矿山和岩体工程领域的三维数字摄影测量和岩体结构分析系统。
利用数码相机获取地质体的图像,通过SIROVISION专用软件对图像处理获取目标岩体的三维空间坐标后,对岩体结构(如断层、裂隙、节理和结构面等)进行参数分析,为实现地质结构的数字编录、岩体稳定分析、爆破设计评估等工作提供了一套快速、高效和安全的全套数据信息采集与处理工具。
系统硬件分地表和地下两类,共用同一款软件SIRO5。
系统还可用于对物体进行三维空间建模,为诸如建立数字化矿山、天然或人工边坡及其它建筑物的管理服务。
SIROVISION技术是澳大利亚联邦科学与工业研究组织(CSIRO)的勘探与采矿研究所在联邦政府科研支持下经过近15年持续研发的产物,其地下立体成像系统经由国际知名航空模拟器生产商CAE公司进行工业设计,使得产品美观、高效、耐用,为当前国际上所特有。
自产品推出至2012年,已在国际上拥有数百个客户,包括世界上7大矿业公司:如Rio Tinto、Xstrata、Newcrest Mining Ltd等。
经SIRO5软件处理的数据文件格式支持国际上常用矿山数字化软件,如:Datamine(Studio),Surpac, Vulcan 和 MineSight 以及AutoCAD等。
国内用户包括中南大学,四川大学,长沙矿山研究院等单位。
技术优势:●大幅度减少工程地质师的现场工作量;●安全获取地质师无法到达区域的岩体信息;●快速,精确,详尽的岩体结构统计分析与报告。
适用对象:●岩土工程师(结构模型、断裂带分析、岩层分析、滑坡体监测等)●地质工程师(快速获得岩体的倾向、倾角、绘制岩脉和矿物图)●矿山测量工程师(岩体三维空间数据图,计算开挖量,爆破设计及破裂程度分析,超挖体积计算(合同监管))●岩石力学科研人员。
VFP、CASS软件在遥测水位、雨量数据处理的应用
据量是相当大的 , 运行 1 次要几 十秒 的时间。
1 2 查漏 、 缺 . 补
由于遥测水位是
1 2h制换算成 2 ; 如果 水位 异常 , 以上一个水位数 4h制 ③ 则
据来代替。同时为 了能让 程序使 用者 了解程 序转 换进度 情 况 , 地用了一句打印语 句 : 1 2 A 转 换 1 共 l 特 @ 2,5S Y , +a — l
tm(t(ec ) ) , r s rc ( ) + 行 已转 换 至 lr s ({n ) )+ i r +a i i ra ( ) h m( r  ̄
3,+ , 6 9 0 1 1 21 . 0 0, ,
4,+ , 1 . 0 0, 1 2 6 9 0 0,
即顺序号 , 编码 , 坐标 Y 坐标 , , 高程 。 可 以利用这个 “ 简码 识别 ” 功能来 生 成水 位 过程 线 图。 数据格式文件 中 ,炳 ” “ 表示 画的是 直线 , “+” 表示该 点与上
一
由于 原始数 据文件 和转换后 的数据 文件格 式都很有 规
则, 因此只需 要 根据 原 始 文件 中的 测 站代 码 ( 本 例 中 的 如
6 6 1即为笔者单位 的旧县水位 站的遥测 代码 ) 90 替换 为转换 后的测站文件名即可( 如转换后 的数据 文件 中的“ 3 02 0 62 3 0 ” 即为旧县水位站的整编资料成果文件名 ) 。 在转换过程中应注意 : 将 月的英文转换 为数 字 ; 将 ① ②
难免会 因为种种意想不到 的原 因而造 成数据丢 失 , 特别 是雷 雨 天气数据更容 易丢失 , 因此我们需要检 查一下原 始数据文 件 的丢失情 况 , 以便将丢失 的数据进行插补 。
基于插件技术实现遥测数据事后处理系统软件
总第174期2008年第12期舰船电子工程Ship Electronic Enginee ring Vol.28No.12138 基于插件技术实现遥测数据事后处理系统软件3张 东 吴晓琳(92941部队96分队 葫芦岛 125000)摘 要 针对不同型号导弹遥测数据事后处理方法存在差异,系统软件需要不断进行调整的问题,引入插件技术,将各类数据处理方法通过动态链接库设计成插件,方便软件的修改和功能扩充,满足遥测数据事后处理软件多样化特点,提高系统软件二次开发效率。
关键词 插件技术;接口;动态链接库;遥测数据处理中图分类号 TP31Sys tem of Telemet ry Dat a Processing Based on Plug 2in Tech nologyZ ha ng D ong Wu Xia olin(Unit 96,No.92941Troop s of PLA ,Huludao 125000)Abs tra ct Because the methods of telemetr y data proce ssing is diffe rent with the va ried missiles ,the system sof twa re is of ten required continual adjustment.The plug 2in technology is int roduced to solve t his problem.The modification and acce s 2sorial f unctio n of sof twa re is realized with t he plug 2ins of met hods based on dyna mic 2link librar y technolog ,which sa tisf ied t he diver sification of system sof twa re ,a nd the efficiency of wor k is improved.Ke y w ords plug 2in ,interface ,dynamic 2link libra ry ,telemetr y da ta p rocessing Class N umber TP311 引言遥测数据事后处理是导弹武器系统试验中不可缺少的重要环节,它将通过无线电遥测技术获取的导弹试验数据,进行各种变换处理,得到被试导弹系统各工作状态参数和环境参数的结果数据,为导弹武器系统的性能和故障分析提供依据[1]。
民机试飞遥测实时数据处理软件设计与研发
民机试飞遥测实时数据处理软件设计与研发民机试飞遥测实时数据处理软件设计与研发引言:随着民用航空行业的快速发展,民机试飞的重要性日益凸显。
试飞阶段是验证民机设计性能、安全性和可靠性的关键时期,其中遥测数据的处理尤为重要。
遥测数据能够提供试飞中各种参数和状态的实时信息,为试飞工程师和研发团队提供评估和决策依据。
为了高效处理和分析试飞遥测数据,设计和研发一款实时数据处理软件至关重要。
一、试飞遥测数据的特点试飞过程中的遥测数据量大、频率高且多样化。
试飞飞机会安装许多传感器,例如加速度计、速度计、气流角传感器等,采集各种数据,包括飞机的状态、性能参数、动力系统数据等。
这些数据通常以模拟信号或数字信号的形式进行传递,需要通过数据处理软件进行实时解析。
二、实时数据处理软件需求分析为了满足试飞遥测数据处理的需求,我们需要设计和研发一款实时数据处理软件,该软件应具备以下核心功能:1. 数据接收与解析:软件能够接收试飞现场传输的遥测数据,并对其进行解析,提取所需数据。
2. 数据存储与管理:软件能够将解析后的数据存储到数据库中,同时建立合理的数据结构进行管理,便于后续的查询和分析。
3. 数据处理与分析:软件能够对试飞遥测数据进行预处理和分析,提供相关的计算模型和算法,以实现对数据的处理和评估。
4. 实时监控与显示:软件能够实时监控试飞过程中的数据变化,提供直观的图形界面用于显示关键参数和状态,使工程师和研发团队可以及时检查和评估试飞的情况。
5. 报警与异常处理:软件能够检测到试飞过程中可能的异常情况,并发出相应的报警提示,帮助工程师及时处理问题。
6. 数据导出与共享:软件能够将试飞遥测数据导出为各种格式,以方便与其他团队、部门或机构进行数据共享和分析。
三、软件设计与研发基于以上需求分析,我们可以开始设计和研发这款实时数据处理软件。
软件的设计应遵循以下原则:1. 前后端分离:将数据接收、解析和处理等核心功能放在后端,前端则主要负责数据显示和用户交互。
五款GNSS数据处理软件基线解算结果研究
文章编号:1674-9146(2016)02-0050-03全球导航卫星系统(Global Navigation Satellite System ,GNSS )泛指所有的卫星导航系统,主要包括美国GPS 、俄罗斯Glonass 、欧洲Galileo 、中国BDS (北斗卫星导航系统)。
GNSS 是一个多系统、多层面、多模式的复杂组合系统。
随着GNSS 系统的发展,作为当前控制测量的主要技术手段,相应的数据处理软件也层出不穷,各有特色。
现就国内常用的5款GNSS 数据处理软件:美国天宝的TBC (Trimble Business Center )、瑞士徕卡的LGO (Leica Geo Office )、南方测绘的GNSS 数据处理与平差软件(简称SOUTH )、中海达的HGO (Hi -Target Geomatics Office )、华测的CGO (CHC Geomatics Office )在基线数据解算设置和成果质量方面进行比较分析,为工程测量中GNSS 数据处理和软件的选用提供参考。
15款软件简介及选用版本1)TBC 是Trimble 的新一代后处理软件,不仅能够处理GNSS 数据,还可以处理全站仪、水准仪、3D 扫描仪数据,集成了功能强大的可视工具和建模工具,利用多种视图全面反映数据信息,全新的处理算法保证其处理速度,并提供了灵活的处理配置方案。
本次分析选用2.2版本。
2)LGO 是徕卡测量系统的一款商业数据处理软件,具有功能强大、易使用、数据分析能力强、处理速度快等特点。
能够输入GNSS 、全站仪和水准仪测量数据,并进行组合处理及平差。
平差模块采用与知名处理软件Bernese 相同的MOVE3平差内核,使用者能够根据需要对卫星系统、采样率、电离层模型等进行设置,以获得最优的测量结果。
本次分析选用8.4版本。
3)SOUTH 能够处理南方公司的静态GPS 数据和各种国内外GPS 接收机RINEX 标准格式数据。
应用OLE技术实现遥测数据处理结果报告自动化生成
第2 6卷
第 2期
飞行器 测 控学 报
J u n lo p c c atTT&C c n lg o r a fS a e r f Te h oo y
Vo . 6 N . 12 o 2
Ap . 0 7 r2 0
Hale Waihona Puke 20 0 7年 4月 手写 , 而是利用计算机通过 wo 文档处理软件编写 , r d 但仍存在 2方面问题 。一是易 出现输入错 误 , 浪费
时间; 二是处理人员在用 Wo 软件编写报告时 , r d 难免对报告的版面格式进行删改 , 如字体 、 譬 字号 、 页码 以及表格设置等。以上 因素导致每次生成 的遥测处理结果报告难 以实现版面格式的完全统一。本文借助 O E技术 , L 采用 c+ udr +B i e 编程语言与 Wo 文档处理软件相结合 的方法 , l r d 通过编程实现了遥测数据处 理结果报告 的自动排版和报告输出, 同时将遥测参数表和曲线图导人到报告中的指定位置 , 改善了报告生 成质量。实践证明, 该软件在靶场遥测数据处理任务中取得明显效果 , 提高了数据处理工作 的效率。
应 用 OL E技 术 实 现 遥 测 数 据 处 理 结 果
报 告 自动 化 生成
张 东 吴 晓琳
( 24 部队 ・ 991 辽宁葫芦岛 ・ 20 0 15 0 )
摘
要
主要介 绍在 遥测数据 处理 结果报 告 自动化 生成软 件的开发设计 中 , 用对 象链接 与嵌入 ( L ) 利 O E 技术 实
r s l rp rs e u t e ot .Au o t ee t aa p o e sn e u trp r tp s t n d r p r o t u u cin e i lme t d tmai t lmer d t r c s i g r s e o y e et g a e o u p t n t sa mpe n e . c y l t i n t f o r Ap l ai n n r n e t s h w a h u l y a d e ce c f h e o t r i nf a t r v d b e s f a e p i t si a g e t s o t tt e q ai f in y o e r p rsa e sg i c l i o e y t ot r . c o s h t n i t i n y mp h w
MODIS遥感数据产品处理流程与大气数据获取
MOD IS遥感数据产品处理流程与大气数据获取刘忠①,凌峰①,张秋文②(①华中科技大学数字流域工程中心遥感与空间信息科学研究所,湖北武汉430074;②东京大学空间信息科学研究中心,日本东京)摘要:MODIS是美国NASA的ESE计划中最重要的传感器。
它具有36个通道,空间分辨率为250~1000m,是新一代的图谱合一的遥感仪器。
它的数据在地球长期观测、地球环境监测、自然灾害监测方面具有广泛的应用前景和重大意义。
本文首先对EOS计划和MODIS仪器的特性进行概述,然后对MODIS的数据产品进行了介绍,再以大气为主,描述了MODIS原始数据到0级数据、1级、2级及更高级产品的处理流程和算法。
重点介绍了由0级数据到2级数据的处理过程和IMAPP及其处理结果,并简要的把IMAPP的处理过程与DAAC的进行对比,最后对IMAPP的大气产品进行了详细说明。
关键词:MODIS;IMAPP;DAAC;大气产品中图分类号:P237.3 文献标识码:A 文章编号:1000-3177(2005)78-0052-061 引 言地球观测系统EOS(Earth Observing System)是ESE计划(Earth Science Enterprise)的核心。
EOS包括一系列卫星、自然科学知识组成和一个数据系统,支持一系列极地轨道和低倾角卫星对地球的陆地表面、生物圈、大气和海洋进行长期观测。
该计划将提供至少18年的地表连续观测,为系统地研究地球提供科学的数据。
该计划要解决的科学问题包括地球辐射收支,温室气体的来源与沉降,云和气溶胶对气候的影响,海洋科学研究,土地利用变化,火山、火灾监测。
其主要任务是对地球及其大气的主要状态参数进行高精度量测,同时开始长期监测人类活动对环境的影响。
EOS的目标是检测地球当前的状况,监测人类活动对地球和大气的影响,预测短期气候异常、季节性乃至年际气候变化,改进灾害预测,长期监测气候与全球变化。
Inpho和MapMatrix在无人机遥感数据处理中的对比研究
Inpho和MapMatrix在无人机遥感数据处理中的对比研究作者:汪思梦朱大明王德智杨永明来源:《安徽农业科学》2016年第11期摘要介绍了2款著名的摄影测量系统——国外的Inpho和国内的MapMatrix系统(含MapMatrix、DATMatrix和EPT)在无人机遥感影像处理中的流程、软件特点和优势,并以资阳市雁江区1∶1 000无人机航空摄影中某一块数据进行试验,对比分析两款系统实际处理流程和精度。
主要结论如下:①Inpho和MapMatrix系统在处理1∶1 000无人机遥感数据时,空中三角测量精度和DOM成图精度、影像质量均能达到国标要求,两者平面精度相差不大,高程精度Inpho相对较好;②Inpho系统软件集成性高、操作性好,空中三角测量性能强、自动化程度高,MapMatrix系统需要调用PATB,处理数据量和效率没有Inpho高,需要人工编辑大量争议点;③MapMatrix在镶嵌成图和编辑方面更加便捷、高效。
关键词无人机遥感;DOM;Inpho;MapMatrix;空中三角测量中图分类号 S127文献标识码 A文章编号 0517-6611(2016)11-264-04无人机遥感(UAV-RS)是利用先进的无人驾驶飞行技术、遥感传感器技术、遥测遥控技术、通信技术、IMU定位定姿技术、GNSS定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取国土、资源、环境、事件等空间遥感信息,并进行处理、建模和分析的先进新兴航空遥感技术解决方案[1-2]。
无人机遥感系统由无人机飞行平台、飞行控制系统、地面监控系统和数据处理与应用分析系统组成。
无人机遥感具有低成本、可重复使用、灵活机动、高时效、分辨率高等特点,正逐步成为卫星遥感、有人机遥感和地面遥感的有效补充,给遥感技术提供了新的平台[3-4]。
无人机遥感由于使用质量较轻的无人机飞行平台,不同于传统航空摄影测量,其获取的数据易受到气候、任务载荷、相机质量等因素的影响,导致飞机姿态不稳定,获取的影像质量会有些不足,如影像重叠度不规则、相幅小、像片数量多、影像倾斜角和旋偏角过大、影像有明显畸变等[7]。
Inpho和MapMatrix在无人机遥感数据处理中的对比研究
Inpho和MapMatrix在无人机遥感数据处理中的对比研究汪思梦;朱大明;王德智;杨永明【摘要】介绍了2款著名的摄影测量系统——国外的Inpho和国内的MapMatrix系统(含MapMatrix、DATMatrix和EPT)在无人机遥感影像处理中的流程、软件特点和优势,并以资阳市雁江区1∶1 000无人机航空摄影中某一块数据进行试验,对比分析两款系统实际处理流程和精度.主要结论如下:①Inpho和MapMatrix系统在处理1∶1 000无人机遥感数据时,空中三角测量精度和DOM 成图精度、影像质量均能达到国标要求,两者平面精度相差不大,高程精度Inpho相对较好;②Inpho系统软件集成性高、操作性好,空中三角测量性能强、自动化程度高,MapMatrix系统需要调用PATB,处理数据量和效率没有Inpho高,需要人工编辑大量争议点;③MapMatrix在镶嵌成图和编辑方面更加便捷、高效.【期刊名称】《安徽农业科学》【年(卷),期】2016(000)011【总页数】4页(P264-267)【关键词】无人机遥感;DOM;Inpho;MapMatrix空中三角测量【作者】汪思梦;朱大明;王德智;杨永明【作者单位】昆明理工大学国土资源工程学院,云南昆明650093;昆明理工大学国土资源工程学院,云南昆明650093;中国地质大学(武汉)信息工程学院,湖北武汉430074;昆明理工大学国土资源工程学院,云南昆明650093【正文语种】中文【中图分类】S127无人机遥感(UAV-RS)是利用先进的无人驾驶飞行技术、遥感传感器技术、遥测遥控技术、通信技术、IMU定位定姿技术、GNSS定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取国土、资源、环境、事件等空间遥感信息,并进行处理、建模和分析的先进新兴航空遥感技术解决方案[1-2]。
无人机遥感系统由无人机飞行平台、飞行控制系统、地面监控系统和数据处理与应用分析系统组成。
采用C/S结构的遥测数据处理系统及其实现技术
特别 是当前流行 的商用 成品技术 ( O S 越 来越 多的在 军工试 CT)
验领域 中的应用及飞行 试验对 数据处 理 的需 求牵 引 , 遥测 数据 处理 系统 及其 集成技术 有了很大的发展 。 本 文简要 介绍最新研制的飞行试验通用遥测数据处理 系统
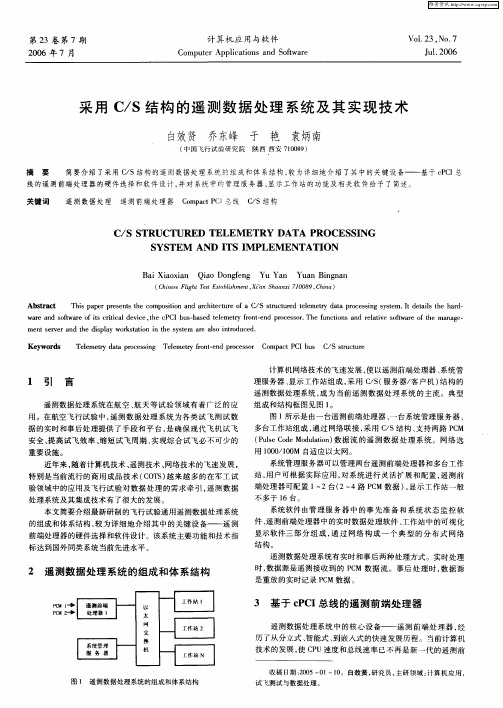
系统 软件由管理 服务 器 中的事 先 准备 和 系统 状 态监 控软 件、 遥测前端处理器 中的实时数据处理软件 、 工作站 中的可视化 显 示软件三部 分组 成 , 过 网络构 成 一 个典 型 的 分布 式 网络 通
me t ev ra d t e d s ly w rsa in i h y t m a e as n r d c d n re n h i a o k tt n t e s se r lo ito u e . s p o Ke wo d y rs T l mer aa p o e sn Tee t r n — n rc s o C mp c CIb s C S sr cu e e e t d t rc s i g y l mer fo t d p o e s r y e o at P u / t t r u
计算机 网络技术 的飞速发展 , 以遥测前端 处理 器 、 使 系统管
1 引 言
遥测数据处理系统在航 空 、 航天等 试验领域 有着 广泛 的应 用。在航空飞行试验 中, 遥测 数据处理 系统 为各类试 飞测试 数 据的实时和事后处理提供 了手段 和平 台 , 确保现 代飞机试 飞 是
多 台工作站组成 , 通过 网络联接 , 采用 C S结构 、 / 支持两路 P M C ( us oeMouao ) P l C d dlt n 数据 流 的遥测 数据 处理 系统 。网络 选 e i
航天器CCSDS遥测数据包处理方法研究
航天器CCSDS遥测数据包处理方法研究
杜冬梅
【期刊名称】《电讯技术》
【年(卷),期】2007(47)2
【摘要】根据空间数据协商委员会(CCSDS)制定的标准,采用分包遥测数据格式,可利用航天器有限的遥测波道资源,合理、分时地将航天器各子系统的信息向地面传输,这就对地面遥测数据处理提出了新的、更高的要求.文中通过对CCSDS标准中分包遥测数据格式的分析,提出了解包思路和地面遥测数据处理系统的实现方法,并结合有关实战任务验证了该方法的合理性和可靠性.
【总页数】5页(P176-180)
【作者】杜冬梅
【作者单位】西北工业大学,西安,710072;西安卫星测控中心,西安,710043
【正文语种】中文
【中图分类】TN919
【相关文献】
SDS遥测包处理分析 [J], 杜国明;陈逢田
2.航天器动作状态的可视化遥测方法研究 [J], 顾征;杨孟飞;薛博;张伍;彭兢;邹昕;陈丽平;王彤
SDS分包遥测在航天器通信中的设计及应用 [J], 梁磊;易予生;陈春亮
4.基于遥测数据的航天器长期性能预示方法研究 [J], 房红征;马好东;罗凯;韩立明;
熊毅
5.基于InSQL数据库的航天器遥测数据存储方法研究 [J], 朱玛;
因版权原因,仅展示原文概要,查看原文内容请购买。
分布式网络遥测数据处理系统软件设计
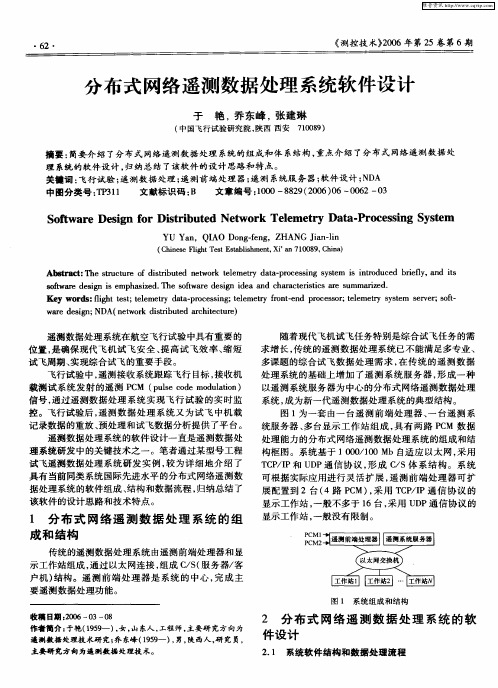
1 分 布 式 网 络 遥 测 数 据 处 理 系统 的 组 成 和 结构
传统 的遥测 数据处 理 系统 由遥测 前端 处理 器和 显
示工作 站组成 , 过 以太 网连接 , 通 组成 C S 服务 器/ /( 客 户机 ) 结构 。遥 测前 端 处 理 器 是 系统 的 中心 , 成 主 完 要遥测 数 据处理 功能 。
w ed s ; D ( e okds iue c i cue r a ei N A n t r ir tda ht tr) n g w tb r e
遥测 数据 处理 系统 在航 空飞 行试验 中具 有重 要 的 位置 , 是确 保 现代 飞机 试 飞安 全 、 高试 飞效 率 、 短 提 缩 试 飞周期 、 现综合 试 飞 的重 要 手段 。 实 飞行试 验 中 , 遥测 接收 系统 跟踪 飞行 目标 , 收 机 接 载测 试 系统 发 射 的遥 测 P M ( us o emouai ) C p l c d d l o e tn 信号 , 过遥 测数 据处 理 系统 实 现 飞行 试 验 的实 时 监 通 控 。飞行试 验后 , 遥测 数 据 处 理 系 统 又 为试 飞 中机 载 记 录数据 的重放 、 预处 理 和试 飞数据 分析 提供 了平 台 。 遥测 数据 处理 系统 的软件设 计 一直是 遥 测数据 处 理 系统研 发 中的关键 技术 之 一 。笔者通过 某 型号 工程 试 飞遥测 数据 处理 系统 研 发 实 例 , 为 详 细地 介 绍 了 较 具有 当前 同类 系统 国际 先进水 平 的分 布式 网络遥 测数 据 处理 系统 的软件 组成 、 结构 和数 据流程 , 归纳 总结 了 该 软件 的设计 思路 和技 术特 点 。
理 系统 的软 件设 计 , 归纳 总 结 了该软 件 的设 计思路 和特 点 。 关键词 : 飞行试 验 ; 测数 据 处理 ; 遥 遥测 前端 处理 器 ; 测 系统服 务 器 ; 件设 计 ; D 遥 软 N A 中 图分 类 号 :P 1 T31 文 献标识 码 : B 文 章编 号 :0 0— 8 9 2 0 ) 6— 0 2— 3 10 8 2 ( 0 6 0 0 6 0
基于客户机/服务器模式的弹箭遥测应用软件
Ab ta tW i h rwigo edma do rjci l t aa tr,d t rt,o lxt f h a sr c : t te o n f h e n f oetet e r prmees aa aecmpei o ep — h g t p l e me y y t
曹 雾 , 张景 鹏 , 张 洪
( 安机 电信 息研 究所 , 西 陕西 西 安 706) 1 0 5
摘 要 : 随着对弹箭遥测参数、 数据速率、 以及外场实时可视数据处理的要求 日 益提高, 计算机的工作量越来
越大 , 为遥测数据 处理软件再像 以往的单 P 单模块运行模式 势必不能满足遥测数据处理 的需要 。因此 , 作 C、 采 用客户机/ 服务 器模式 和多线程技术的遥测数据采集与处理 软件来对 遥测 数据进行接收 、 送 、 储和显示 , 传 存 该 方法可 以有效降低遥测数据采集服务器 的负担 , 便于多个客户端 同时进行 遥测数据的监控 , 满足弹箭遥测 网络
化发展的需要 。
关键 词 : 遥测数据采集; 客户机/ 服务器模式; 用户报协议; 多线程
中 图分类 号 : 1 1 文献 标志 码 : 文章 编号 :0819 {080- 1-4 T ̄1 A 10—1420 )3 0 7 0 0
P o t eT l tyAp l ainS f r ae nCl n/ evrMo e rjci ee r pi t ot eB sdo i tS re d l e l me c o wa e
sn l n i l o ueo e ainmo e S a s ee tyd t c ust na dp d l p r t d . owec n u etlmer aaaq iio n r cs o t r a e C g o i
遥测数据处理方法(上)
遥测数据处理方法(上)
江帆;军华
【期刊名称】《计算机自动测量与控制》
【年(卷),期】1993(000)002
【摘要】本文以工程应用为目的,系统地介绍了遥测数据处理方法。
文中介绍的各种处理方法是目前数字化遥测系统中最常用的一些方法,所列举的部分实例读者可以直接引用。
【总页数】8页(P22-29)
【作者】江帆;军华
【作者单位】不详;不详
【正文语种】中文
【中图分类】V557.3
【相关文献】
1.潮水河站遥测数据处理方法研究 [J], 费国松;潘杰;韦忠
2.基于XTCE的卫星遥测数据处理方法 [J], 刘洋;李宗德;丁雪静;戴媛媛;何晓苑
3.基于莱特准则和小波变换的遥测数据处理方法 [J], 孙永帅;王少云
4.靶场遥测数据处理方法的分析研究 [J], 赵圣占;杨若红
5.靶场遥测数据处理方法的分析研究 [J], 王大志;
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥测数据处理软件
我们能够提供全面的遥测数据处理和分析软件,这些软件从体系结构上分成以下层次:
-供用户开发遥测数据处理软件的应用程序接口API
Acroamatics公司提供遥测数据处理软件应用程序接口API,用户能够用API编写访问Acroamatics各种遥测板卡的程序,程序能够对遥测板卡进行设置和控制.
API由能够进行连接编译的库文件和包括C语言源程序代码头文件组成,也包括一些驱动程序和服务程序.
通过七个软件库来实现API的各种功能,其中五个动态连接库,两个静态连接库.
-供用户进行遥测数据处理编程的专用遥测语言
遥测数据处理编译器实时显示命令语言:用户可以用这个语言写遥测设置文件来控制数据显示.用户能够用遥测数据处理机编译器提出或修改通过设置菜单系统进行的数据实时显示.实时数据显示的功能包括曲线显示,棒型条显示,数据刷显示.
tdpg:遥测数据处理机发生器TDPG是Acroamatics遥测数据处理机系统一个软件.可以用它为遥测数据处理构造设置程序.Tdpg是一个软件许可证,当你购买遥测数据处理机时,tdpg包括在软件包中.tdpg设置语言要比遥测数据处理机编译器tdpc抽象,它能对PCM数据流,帧格式,PCM字进行操作,能够编制处理函数实现自己的处理算法.
软件配置程序:用户可以用这个程序修改和定制遥测数据处理的配置文件.
-770/880 pcm系统处理软件Mpxtdp
这个软件是针对770/880 PCM系统开发的,它除了能够以窗口菜单方式实现基本的数据处理功能外,还与770/880 PCM系统的机载程序数据库交联,能够自动将770/880 PCM机载数据库的相关内容加载到数据处理数据库中.
-与NI公司LabVIEW软件的接口
Acroamatcs公司提供了与NI公司LabVIEW软件的编程接口,用户可以通过这个接口用LabVIEW软件编制自己的虚拟仪表处理程序.
-遥测数据处理与分析系统Htdp
HTDP遥测数据处理与分析软件分三个部分:
◆遥测参数属性库管理系统
遥测参数属性库管理系统是按照IRIG TMATS(IRIG106标准)设计的,它符合接收/处理系统所需要的参数,以便采集、处理和显示从试验项目/源收到的遥测数据。
该数据库管理系统为用户和试验靶场之间以及靶场之间传递信息提供了一个公共的定义和格式。
属性定义了,设置接收和处理设备所需的信息也就确定了。
该参数属性根据数据的结构可以划分成如下几类:
一般信息:建立顶层程序定义,标识数据源。
传输属性:定义一个射频链路,对一般信息组中标识的每个射频链路都有一个组。
磁带源属性:标识一个磁带数据源。
多路复用/调制属性:描述FM/FM,FM/PM或PM/PM多路传输特征,每个多路传输波形必须有唯一的属性集,对模拟量测量,与工程单位转换的关系放在本组。
数字数据属性:本属性分为三个组:PCM格式属性,PCM测量说明和1553总线数据属性。
PCM格式属性:定义PCM数据格式特征,包括帧和嵌入格式,每种PCM 格式将有一个单独的格式属性组。
PCM测量说明:定义将PCM测量、格式及数据转换(量化)连系在一起的各个PCM测量对象。
1553总线数据属性:规定PCM编码的1553总线格式特征。
PAM属性:含有PAM系统的定义,包括PAM格式特征和测量属性,还有PAM格式中被测量的工程单位转换的途径。
数据转换属性:含有本系统中所有测量结果的数据转换信息,包括量化数据和从原始数据到工程单位的转换定义。
◆通用遥测数据处理系统
HTDP遥测数据处理系统总结了目前遥测界常用的遥测数据处理方法,采用窗口菜单方式对遥测数据进行处理.
全帧显示
飞行试验任务准备阶段, 在机载采集系统和遥测地面站系统帧格式和参数通道调试时,往往需要观察遥测全帧的结构和运行情况,HTDP系统可以以10进制、16进制和百分比三种方式显示全帧数据,这三种方式可以任意组合,显示画面随组合的不同而发生变化。
选择参数数据的滚动显示
实时或事后对选择的参数以十进制,十六进制,二进制,百分比方式进行物理量或码值的显示.对于1553B 数据还可以进行嵌套式显示.
选择参数的时间历程曲线显示
实时或事后对选择的参数以时间历程曲线方式进行显示,对于某一段曲线还可以进行放大.
选择参数的分路存盘
为了将遥测数据进行有选择的保存或通过存储媒介传递遥测数据,对选择的参数以十进制,十六进制,二进制,百分比方式进行物理量或码值的分路存储,存储格式可以是文本方式,也可以是二进制格式.可以一个参数存到一个文件也可以多个参数存到一个文件.
选择参数的网络广播
为了在遥测终端进行专门计算或图形显示的需要,可以实时或事后对选择的参数以十进制,二进制,十六进制,百分比等方式进行物理量或码值的网络广播,网络,广播端口可以选择.
◆动态信号处理和模态参数识别系统
在飞机的试验工作中,有许多项目,包括地面共振试验,风洞和飞行颤振试验,以及非定常空气动力和抖振响应测量,都涉及动态信号的处理.
动态信号处理包括动态信号数据采集,数字谱分析和频率响应函数测量与估计.模态参数识别包括频域和时域的单模态和多模态以及多输入/多输出的模态识别.
动态信号的采集与显示
动态信号也是作为遥测参数插在遥测数据帧中.在机载方面,770 PCM系统具有的高采样率和并行采集能力是动态信号处理的基础.动态信号的采集与显示就是从遥测数据帧中将动态信号挑出,并按照一定规律排序、处理,以曲线的形式显示.曲线显示可以是在时域上也可以是频域上。
具体在那个域上显示根据处理函数的不同而不同。
当处理函数为F(t)时是在时域上。
这时横坐标是样本的时间,纵坐标可以是:振幅(amplitude),实部(real);当处理函数为非F(t)时,处理在频域上。
这时横坐标范围是处理的频率范围,纵坐标在处理函数为:F(f),Gxy,H时,可以是:振幅(amplitude),相位(phase),A+P:振幅(amplitude)+相位(phase),实部(real),虚部(imaginary),R+I:实部(real)+虚部(imaginary),尼奎斯特(Nyquist);处理函数为其他函数时,纵坐标只可以是:振幅(amplitude),实部(real)。
特殊的是:当选择Y轴内容为尼奎斯特(Nyquist)时,横坐标内容为实部(real),纵坐标内容为虚部(imaginary)。
每一个曲线显示窗口的顶部为动态信号参数的物理含义和物理单位。
极点计算(POLE)
极点计算(POLE)包括:极点初始(INIT),极点计算(Start),极点选择(Select)。
操作时应先运行“极点计算”,屏幕上会显示出计算出的极点结果.
画面上左侧为信息描述区,右侧为计算结果显示区。
右侧分上下两部分显示区域,上侧区域为选择好的极点显示区域,横坐标为频率,纵坐标为阻尼;下侧区域为所有计算出的极点结果,横坐标为处理的频率范围,纵坐标为自由度范围。
画面上浅灰色的曲线为频响函数曲线。
画面左部描述:
Criterion stabilization : 判定稳定性;
LEGEND: 图标符号:绿色的“+”表示被选中的极点;
粉红色的“*”表示稳定的极点;
桔黄色的“*”表示半稳定的极点;
白色的“I”表示不稳定的极点;
图标符号的下面为算法描述。
当第一次运行时,操作时如没有先运行“极点计算”,而是先运行了“极点初始”,那么显示画面上将没有极点计算结果,只有频响函数FRF曲线。
模态显示(MODAL)
模态显示的前提是极点已经计算过了,才能运行此项功能。
内容有:"存盘选择的极点(sel-pole)","存盘计算的极点(cal-pole)","存盘分析的极点(ana-pole)","删除mode(del-pole)","显示mode表","显示FRF曲线"。
若选择的试验是第一次创建的,首先,在已经运行过极点计算的基础上,分别点击:"存盘选择的极点(sel-pole)","存盘计算的极点(cal-pole)","存盘分析的极点(ana-pole)",三个功能菜单,然后才可以点击:"显示mode表","显示FRF曲线"菜单;
留数计算(Residues)
留数计算(Residues):此项菜单功能必须在:“极点计算(POLE)”“模态显示(MODAL)”两项功能都执行完后才能进行。
显示画面上分左右两个区域:左区域为信息描述区;右区域为计算结果表,画面上绿线为测量曲线,红线为合成结果曲线。
横坐标为频率,纵坐标为阻尼。
MCK计算(MCK)
MCK计算(MCK)功能必须在:“极点计算(POLE)”,“模态显示(MODAL)”,“余数计算(Residues)”三项功能都执行完后才能进行。
显示画面上分左右两个区域:左区域为信息描述区;右区域为计算结果表,画面上矩形框大小代表相应计算结果大小。
横坐标为选择的模态,纵坐标为M(质量),C(阻尼),K(刚度)。
—飞行实时监视和事后重演系统(由北京思壮为主开发)
遥测通用数据处理系统将选择的参数经过处理后通过网路进行广播,用户可以在实时监视工作站对飞行的飞机及地空环境实施三维模型仿真,航迹监视,座舱仪表显示仿真,及部分数据的监视.所选择的参数包括GPS单独数传参数和770 PCM系统通过异步串行卡采集的GPS数据.
部分数据的监视
航迹监视
三维飞机飞行模型及飞行环境仿真
三维飞行座舱仿真。