《弹塑性分析》PPT课件
合集下载
压力容器厚壁圆筒的弹塑性应力分析PPT课件
3/9/2021
厚壁圆筒的弹塑性应力分析
Page - 13
则平衡方程(不计体力)为
dr r 0
dr
r
dz 0
dz
(2-5)
3/9/2021
厚壁圆筒的弹塑性应力分析
Page - 14
几何方程为
rd du r, u r, zd dw z
(2-6)
变形协调方程
d d r1 r(d du ru r)1 r(r)
3/9/2021
厚壁圆筒的弹塑性应力分析
Page - 25
(2)两端封闭的筒体(筒体端部有端盖) 轴向应力由轴向平衡条件求得
(R o 2 R i2 )zR i2 p iR o 2 p o
即
3/9/2021
z
Ri2pi Ro2po Ro2 Ri2
c3
(2-19)
厚壁圆筒的弹塑性应力分析
Page - 26
(c)
3/9/2021
厚壁圆筒的弹塑性应力分析
Page - 24
将 c1 、c2 值代入式(2-13),得两端开
口的厚壁圆筒的位移表达式
u 1 E(R i2R p io 2 R R o 2 i2 p o)r 1 ER i( 2 R R o o 2 2( p iR i2)p ro)
(2-18)
t r
1 E
t r
( t
1Ri2Ro2(pi po
E
Ro2 Ri2
)
3/9/2021
厚壁圆筒的弹塑性应力分析
Page - 29
下面列出厚壁圆筒各种受力情况(两端封闭)弹性 状态下的应力及位移计算公式
(1)厚壁圆筒同时作用内、外压
( pi 0, p00)时
工程弹塑性力学课件
工程弹塑性力学课件
目 录
• 弹塑性力学基础 • 弹性力学基本理论 • 塑性力学基本理论 • 工程应用实例 • 工程弹塑性力学展望
01
弹塑性力学基础
弹塑性力学定义
弹塑性力学
弹塑性力学是一门研究材料在弹 性极限和塑性极限内应力、应变 行为的科学。它广泛应用于工程 领域,为各种结构设计和分析提
供理论基础。
有限差分法
将物体的位移表示为离散的点的 差分形式,通过求解这些点的位 移来近似求解整个物体的位移。
边界元法
将物体的边界离散化为有限个小 的单元,通过求解这些单元的力 学行为来近似求解整个物体的边 界力学行为。
03
塑性力学基本理论
塑性力学基本概念
01
02
03
塑性力学
塑性力学是研究材料在达 到屈服点后,发生不可逆 变形时行为和特性的学科 。
边界元法
通过在边界上离散化求解微分方程的方法,可以减少未知数的数量 ,提高求解效率。
有限差分法
将微分方程转化为差分方程,通过迭代求解的方法得到近似解。
04
工程应用实例
桥梁工程弹塑性分析
总结词
桥梁结构稳定性
详细描述
桥梁工程弹塑性分析主要关注桥梁结构的稳定性,通过分 析桥梁在不同载荷下的弹塑性响应,评估其承载能力和安 全性。
总结词
材料非线性
详细描述
桥梁工程中的材料多为金属或复合材料,这些材料的弹塑 性行为呈现出非线性特征。在分析过程中,需要考虑材料 在不同应力水平下的弹塑性变形和破坏。
总结词
结构优化设计
详细描述
基于弹塑性分析的结果,可以对桥梁结构进行优化设计, 提高其承载能力和稳定性,同时降低制造成本和维护成本 。
目 录
• 弹塑性力学基础 • 弹性力学基本理论 • 塑性力学基本理论 • 工程应用实例 • 工程弹塑性力学展望
01
弹塑性力学基础
弹塑性力学定义
弹塑性力学
弹塑性力学是一门研究材料在弹 性极限和塑性极限内应力、应变 行为的科学。它广泛应用于工程 领域,为各种结构设计和分析提
供理论基础。
有限差分法
将物体的位移表示为离散的点的 差分形式,通过求解这些点的位 移来近似求解整个物体的位移。
边界元法
将物体的边界离散化为有限个小 的单元,通过求解这些单元的力 学行为来近似求解整个物体的边 界力学行为。
03
塑性力学基本理论
塑性力学基本概念
01
02
03
塑性力学
塑性力学是研究材料在达 到屈服点后,发生不可逆 变形时行为和特性的学科 。
边界元法
通过在边界上离散化求解微分方程的方法,可以减少未知数的数量 ,提高求解效率。
有限差分法
将微分方程转化为差分方程,通过迭代求解的方法得到近似解。
04
工程应用实例
桥梁工程弹塑性分析
总结词
桥梁结构稳定性
详细描述
桥梁工程弹塑性分析主要关注桥梁结构的稳定性,通过分 析桥梁在不同载荷下的弹塑性响应,评估其承载能力和安 全性。
总结词
材料非线性
详细描述
桥梁工程中的材料多为金属或复合材料,这些材料的弹塑 性行为呈现出非线性特征。在分析过程中,需要考虑材料 在不同应力水平下的弹塑性变形和破坏。
总结词
结构优化设计
详细描述
基于弹塑性分析的结果,可以对桥梁结构进行优化设计, 提高其承载能力和稳定性,同时降低制造成本和维护成本 。
弹塑性本构模型理论课件

。
材料屈服强度影响规律
屈服强度定义
材料开始发生明显塑性变形的最小应力值,反映了材料抵抗塑性变 形的能力。
屈服强度对弹塑性行为的影响
屈服强度越大,材料抵抗塑性变形的能力越强,进入塑性阶段所需 的应力水平越高,材料的塑性变形能力越差。
屈服强度的影响因素
材料的晶体结构、化学成分、温度、应变速率等都会影响屈服强度 的大小。
材料弹性模量影响规律
弹性模量定义
01
材料在弹性阶段内,应力与应变之比,反映了材料抵抗弹性变
形的能力。
弹性模量对弹塑性行为的影响
02
弹性模量越大,材料的刚度越大,相同应力作用下产生的弹性
变形越小,进入塑性阶段所需的应力水平越高。
弹性模量的影响因素
03
材料的晶体结构、化学成分、温度等都会影响弹性模量的大小
弹性阶段
材料在受力初期表现出弹性行为,应 力与应变呈线性关系,卸载后无残余 变形。
屈服阶段
当应力达到屈服强度时,材料进入塑 性阶段,应力不再增加但应变继续增 加,卸载后有残余变形。
强化阶段
材料在塑性阶段表现出应变硬化特性 ,随着塑性应变的增加,屈服强度逐 渐提高。
理想弹塑性模型
无强化阶段的弹塑性模型,屈服后应 力保持恒定,应变无限增加。
通过实验测定金属材料的弹性模量、屈服强度、硬化模量等参 数,为模拟提供准确数据。
利用有限元软件建立金属材料的弹塑性行为模型,进行加载、 卸载等模拟过程。
将模拟结果与实验结果进行对比,验证弹塑性本构模型在金属 材料行为模拟中的准确性和可靠性。
实例二:混凝土结构弹塑性损伤评估
损伤模型选择
针对混凝土结构的损伤特点,选择合适 的弹塑性损伤本构模型,如塑性损伤模
12 旋转圆盘-弹塑性分析
( rp r b)
塑性区: 平面应力状态: z=0 体积不可压缩:z= -(r+) 形变理论:(r-z):(-z)=r: 连续条件:r=rp时:u连续
土木工程与力学学院 · 罗文波
18
弹塑性力学
位移分量:
u
sr
2E
1
5 2 2 2 r p p
b
h
土木工程与力学学院 · 罗文波
2
弹塑性力学
弹性本构方程:
r
1 ( r ) E
1 ( r ) E
( r ) E
z
几何方程:
du r dr u r
边界条件:
r
S
Fr
u Su u
土木工程与力学学院 · 罗文波
19
l 3( 3 ) e 8
超速工序:0p 0 e
1 3 1.118 1 2 1.146
土木工程与力学学院 · 罗文波
17
弹塑性力学
4. 位移分量:
=1/2,ij=e ij
弹性区: u r 1 ( ) r E
4 2 r r r s 5 p 5 p 2 2 3 u pr E 2 32 32 r 48 r
3
弹塑性力学
2.解答:
由几何方程得应变协调方程: 将本构方程代入上式得:
d r r 0 dr
d d - r ) 0 dr dr
(1 )( r ) r (
由平衡方程:
取:
d ( r r ) 2 r 2 0 dr r (r ) r r r d 2 2 r (r) 称为应力函数。 dr
第十七章-弹塑性分析详解
b
s
max s
理想弹塑性模型
P
h
开始屈服
max
M W
M bh2
6
(+) Pl 4
b
s
max s
理想弹塑性模型
M e sW
P
h
(+) Pl 4
b
进入屈服
s
max
M W
M bh2
2e
6
max s s
理想弹塑性模型
M
2( h 2
e)b s
•
1 (h 22
e)
W'
sz
(h2 4
e2 )b s
2 3
b
s
e2
P
h
整截面屈服
(+) Pl 4
M e=0
h2 (
4 Mu
e2 )b s
h2 4
b
s
2 3
b
se2
b
s
s
理想弹塑性模型
Mu 6 1.5 Me 4
P
塑性铰 的形成
塑性铰(plastic hinge)的力学模型
Mu
Mu
与普通铰相比,塑性铰
是个概念或力学模型
s,进入屈服阶段,接着还有强化阶段,最后进入局部变
形阶段,然后破坏。
认为屈服就破坏,这是弹性设计的概念。按照 弹性设计的构件工作时只允许发生弹性变形。 安全性与经济性的平衡:工程师必须考虑的问题 弹塑性设计:充分利用材料的塑性变形,化有害 为有利。
塑性材料应力应变关系
column beam
joint
N2
P cos2 1 2 cos3
P
N3 1 2 cos3
弹塑性力学课件-10塑性极限分析
s ij ij
1 2
s
ij
ui x j
s
ji
u j xi
体力为零时:
Fiui*dS
s
ij
* ij
dV
ST
V
13
虚功率原理:在外力作用下处于平衡的变形体,若给物 体一微小的虚变形(位移)。则外力的虚功率必等于应 力的虚功率。
fiui*dV
设机动允许的位移(速度)场 u * i
q ij*
破坏载荷: k Pi 应力场: s * ij
虚功率原理:
k Piui*dS
s
*
ij
i*j
dV
ST
V
s*
s s ij
*
ij
ij
s ij
l Piui*dS s iji*jdV
ST
V
k l
ST
s l
16
三.塑性极限分析定理
2. 上限定理:
机动允许的位移(速度)场:满足破坏机构条件(几何 方程和位移、速度边界条件),外力做功为正的位移 (速度)场。 [ 放松极限条件,选择破坏机构,并使载荷在其位移场上 做功为正]
破坏载荷:机动允许的位移场所对应的载荷。k P
k :机动允许载荷系数
限:Pl+= kP
(3)在多个破坏荷中取最小值: Plmin+
(4)检查:若内力场是静力允许的,即不违背极限条件, 则解:)Plmin+ =Pl 。否则: Plmin+ 为Pl 的一个上限解(近似
21
§10-3 梁的塑性极限分析
一.静定梁的极限分析
弹塑性分析.

能力谱方法
剪力(Vb) 和顶点位移(UN) 关系曲线-能力曲线
– 建立能力谱曲线:对结构进行Pushover 分析,得到结构的基底
能力谱法
roof
F
Capacity Curve
Capacity Spectrum
Vbase
Pushover Analysis
Sa
transform
Vbase
roof
MDOF System
Sd SDOF System
Pushover方法的基本原理
多自由度的荷载-位移关系转换为使用单自由度体系的加速度-位移方式表现的能力谱 (capacity spectrum),地震作用的响应谱转换为用ADRS(Acceleration-Displacement Response Spectrum)方式表现的需求谱(demand spectrum)。
Pushover方法的实施步骤
目标位移的求解
– 等效单自由度方法(N2方法)。将原结构等效为一弹塑性单自由度体 系,确定等效刚度、屈服荷载、屈服位移和等效自振周期。从已知的弹 性反应谱中按照等效周期可以得到结构的等效弹性位移。通过计算得到 将弹性反应谱转化为弹塑性反应谱的折减系数以及结构的延性系数,利 用等效弹性位移和反应谱折减系数以及结构延性系数就可以计算得出结
*
f y ,eq
Q* y M*
f0,eq Sa (Teq )
Sa (Teq )M *
f y ,eq Q* y 由强度折减系数谱与延性系数之间关系
R
f0,eq
T ( u 1 ) 1 Tc R u
T<Tc T Tc
计算结构的弹塑性位移
能力谱法
弹塑性力学(浙大通用课件)通用课件

塑性力学
研究材料在塑性状态下应 力和应变行为的科学。
塑性力学的基本假 设
塑性变形是连续的,且不改变物质的性质。 塑性变形过程中,应力和应变之间存在单值关系,且该关系是连续的。 塑性变形过程中,材料内部的应力状态是稳定的,不会出现应力振荡或波动。
塑性力学的基本方程
应力平衡方程
在塑性状态下,物体的内部应力场满 足平衡方程,即合力为零。
应变协调方程
本构方程
在塑性状态下,应力和应变之间的关 系由本构方程描述,该方程反映了材 料的塑性行为特性。
在塑性状态下,物体的应变状态满足 应变协调方程,即应变是连续的。
塑性力学的边值问题
01
塑性力学中的边值问题是指给定 物体的边界条件和初始条件,求 解物体内部的应力和应变状态的 问题。
02
边值问题可以通过求解微分方程 或积分方程来解决,具体方法取 决于问题的具体形式和条件。
04
材料弹塑性性质
材料弹性性质
弹性模量
材料在弹性变形阶段所表现出的 刚度,反映了材料抵抗弹性变形
的能力。
泊松比
描述材料在受到压力时横向膨胀 的程度,反映了材料在弹性变形
阶段的横向变形特性。
弹性极限
材料在弹性变形阶段所能承受的 最大应力,超过该应力值材料将
发生不可逆的塑性变形。
材料塑性性 质
屈服点
解析法的优点是精度高、理论严 谨,但缺点是适用范围较窄,对
于复杂问题难以得到解析解。
有限元法
有限元法是一种将连续的求解域离散化为有限个小的单元,通过求解这些小单元的 解来逼近原问题的求解方法。
它适用于各种复杂的几何形状和边界条件,能够处理大规模的问题,并且可以方便 地处理非线性问题。
建筑结构大震下弹塑性分析讲义(PPT60张)
建筑结构大震下弹塑性分析
中国建筑科学研究院
PKPMCAD工程部
弹塑性分析目的、意义 弹塑性分析方法 弹塑性分析的具体实现
弹塑性分析目的、意义
三水准设防中的“大震不倒” 两阶段设计中的“第二阶段弹塑性变形验算” 强震下变形验算的基本问题: 计算薄弱层位移反应和变形能力;通过改 善结构均匀性和加强薄弱层使得层间位移角满 足限值要求。
影响系数 层间位移角 周期-最大位移角曲线
周期-影响系数曲线 需求谱曲线 周期-加速度曲线 能力曲线
1/105
等效单自由度体系验算曲线
T
• 4。抗倒塌验算的其它方法——弹塑性分析可以按设定 的方式考虑结构的倒塌机制。如下图所示,当结构由 于外部原因,在局部失去支撑,此时分析结构的现状。
应进行弹的单层钢筋混凝 土柱厂房的横向排架
2) 7 9 度时楼层屈服强度系数小于0.5 的钢 筋混凝土框架结构 3) 高度大于150m 的钢结构
4) 甲类建筑和9 度时乙类建筑中的钢筋混凝 土结构和钢结构 5) 采用隔震和消能减震设计的结构
宜进行弹塑性变形验算的结构
结构薄弱部位的判断
1。最大层间位移、最大有害层间位移所在的楼层; 2。层间位移、有害层间位移超过规范限值的楼层; 3。结构构件塑性铰、剪力墙破坏点比较集中的部位; 4。结构局部变形较大的部位; 5。结构弹塑性反应力突变的部位。
薄弱部位
薄弱层
结构抗倒塌验算
• 1。需求谱曲线(周期-影响系数曲线)——结构在静 力推覆分析过程中,随着结构的破坏、结构阻尼的增 加、结构自振周期的变化,反映出结构在设计烈度大 震下的弹塑性最大水平地震影响系数曲线。该曲线综 合反映了结构弹塑性变形过程中地震作用变化的情况。 2。能力曲线(周期-加速度曲线)——基于等效单质点体 系综合统计出的结构周期加速度曲线。随着结构进入 弹塑性状态,结构的自振周期、顶点加速度反应也发 生变化,当该曲线穿过需求普曲线时,说明结构能够 抵抗设计烈度的大震,否则就认为不能抵抗设计烈度 的大震情况。越早穿过需求普曲线,说明结构抵抗大 震的能力越强,当曲线趋于水平时,说明结构接近破 坏、倒塌;
中国建筑科学研究院
PKPMCAD工程部
弹塑性分析目的、意义 弹塑性分析方法 弹塑性分析的具体实现
弹塑性分析目的、意义
三水准设防中的“大震不倒” 两阶段设计中的“第二阶段弹塑性变形验算” 强震下变形验算的基本问题: 计算薄弱层位移反应和变形能力;通过改 善结构均匀性和加强薄弱层使得层间位移角满 足限值要求。
影响系数 层间位移角 周期-最大位移角曲线
周期-影响系数曲线 需求谱曲线 周期-加速度曲线 能力曲线
1/105
等效单自由度体系验算曲线
T
• 4。抗倒塌验算的其它方法——弹塑性分析可以按设定 的方式考虑结构的倒塌机制。如下图所示,当结构由 于外部原因,在局部失去支撑,此时分析结构的现状。
应进行弹的单层钢筋混凝 土柱厂房的横向排架
2) 7 9 度时楼层屈服强度系数小于0.5 的钢 筋混凝土框架结构 3) 高度大于150m 的钢结构
4) 甲类建筑和9 度时乙类建筑中的钢筋混凝 土结构和钢结构 5) 采用隔震和消能减震设计的结构
宜进行弹塑性变形验算的结构
结构薄弱部位的判断
1。最大层间位移、最大有害层间位移所在的楼层; 2。层间位移、有害层间位移超过规范限值的楼层; 3。结构构件塑性铰、剪力墙破坏点比较集中的部位; 4。结构局部变形较大的部位; 5。结构弹塑性反应力突变的部位。
薄弱部位
薄弱层
结构抗倒塌验算
• 1。需求谱曲线(周期-影响系数曲线)——结构在静 力推覆分析过程中,随着结构的破坏、结构阻尼的增 加、结构自振周期的变化,反映出结构在设计烈度大 震下的弹塑性最大水平地震影响系数曲线。该曲线综 合反映了结构弹塑性变形过程中地震作用变化的情况。 2。能力曲线(周期-加速度曲线)——基于等效单质点体 系综合统计出的结构周期加速度曲线。随着结构进入 弹塑性状态,结构的自振周期、顶点加速度反应也发 生变化,当该曲线穿过需求普曲线时,说明结构能够 抵抗设计烈度的大震,否则就认为不能抵抗设计烈度 的大震情况。越早穿过需求普曲线,说明结构抵抗大 震的能力越强,当曲线趋于水平时,说明结构接近破 坏、倒塌;
《弹塑性分析》课件

未来研究将更加关注多物理场耦合的弹塑性分析,如结构-流体-热等多物理场的相互作用 ,需要发展更为复杂和高效的数值方法。
新材料和新工艺的弹塑性分析
随着新材料和新工艺的出现,对新材料和新工艺的弹塑性分析将成为未来的重要研究方向 ,包括对超弹性、粘弹性、粘塑性等方面的研究。
人工智能在弹塑性分析中的应用
人工智能技术在许多领域都取得了显著的成果,未来可以将人工智能技术应用于弹塑性分 析中,如利用机器学习算法进行模型预测和优化等。
03
建立每个单元的平衡方程,通过求解这些方程得到整个系统的
近似解。
弹塑性分析的有限元模型
材料属性
考虑材料的弹性模量、泊松比、屈服强度等 参数。
初始条件
设定模型在分析开始时的状态,如初始应变 、初始应力等。
边界条件
根据实际情况设定模型的边界条件,如固定 、自由、受压等。
载荷
根据实际情况施加适当的载荷,如集中力、 分布力等。
在建立弹塑性本构模型时,还需要考虑材料的 硬化或软化行为,以及温度、应变速率等对材 料力学行为的影响。
Hale Waihona Puke 03弹塑性分析的有限元方法
有限元方法的基本原理
离散化
01
将连续的物理系统离散成有限个小的单元,每个单元具有特定
的形状和大小。
近似解
02
用数学模型描述每个单元的行为,并使用近似解代替精确解。
平衡方程
弹塑性分析
目 录
• 弹塑性分析概述 • 弹塑性本构模型 • 弹塑性分析的有限元方法 • 弹塑性分析的实例 • 弹塑性分析的展望与挑战
01
弹塑性分析概述
弹塑性材料的定义与特性
弹塑性材料
弹性
塑性
弹塑性材料的特性
新材料和新工艺的弹塑性分析
随着新材料和新工艺的出现,对新材料和新工艺的弹塑性分析将成为未来的重要研究方向 ,包括对超弹性、粘弹性、粘塑性等方面的研究。
人工智能在弹塑性分析中的应用
人工智能技术在许多领域都取得了显著的成果,未来可以将人工智能技术应用于弹塑性分 析中,如利用机器学习算法进行模型预测和优化等。
03
建立每个单元的平衡方程,通过求解这些方程得到整个系统的
近似解。
弹塑性分析的有限元模型
材料属性
考虑材料的弹性模量、泊松比、屈服强度等 参数。
初始条件
设定模型在分析开始时的状态,如初始应变 、初始应力等。
边界条件
根据实际情况设定模型的边界条件,如固定 、自由、受压等。
载荷
根据实际情况施加适当的载荷,如集中力、 分布力等。
在建立弹塑性本构模型时,还需要考虑材料的 硬化或软化行为,以及温度、应变速率等对材 料力学行为的影响。
Hale Waihona Puke 03弹塑性分析的有限元方法
有限元方法的基本原理
离散化
01
将连续的物理系统离散成有限个小的单元,每个单元具有特定
的形状和大小。
近似解
02
用数学模型描述每个单元的行为,并使用近似解代替精确解。
平衡方程
弹塑性分析
目 录
• 弹塑性分析概述 • 弹塑性本构模型 • 弹塑性分析的有限元方法 • 弹塑性分析的实例 • 弹塑性分析的展望与挑战
01
弹塑性分析概述
弹塑性材料的定义与特性
弹塑性材料
弹性
塑性
弹塑性材料的特性
弹塑性力学PPT课件精选全文

◆ 体力分量指向同坐标轴正向一致取正,反之负。
.
*
⑾.静力边界条件
◆ 一个客观的弹塑性力学问题,在物体边界上 任意一点的应力分量和面力分量必定满足这 组方程。
◆ 面力分量指向同坐标轴正向一致取正,反之 取负。
.
*
◆ 当边界面与某一坐标轴相垂直时,应力分量 与相应的面力分量直接对应相等。
.
*
2、几何假设——小变形条件
(1)在弹塑性体产生变形后建立平衡方程时,可以 不考虑因变形而引起的力作用线方向的改变;
从而使得平衡条件与几何变形条件线性化。
(2)在研究问题的过程中可以略去相关的二次及二 次以上的高阶微量;
假定物体在受力以后,体内的位移和变形是微小 的,即体内各点位移都远远小于物体的原始尺寸,而 且应变( 包括线应变与角应变 )均远远小于1。根据 这一假定:
.
*
五、 弹塑性力学的基本假设
(1)连续性假设:假定物质充满了物体所占有的 全部空间,不留下任何空隙。
(2)均匀性与各向同性的假设:假定物体内部各点 处,以及每一点处各个方向上的物理性质相同。
1、物理假设:
(3)力学模型的简化假设: (A)完全弹性假设 ;(B)弹塑性假设。
可归纳为以下几点: 1.建立求解固体的应力、应变和位移分布规律的 基本方程和理论; 2.给出初等理论无法求解的问题的理论和方法, 以及对初等理论可靠性与精确度的度量; 3.确定和充分发挥一般工程结构物的承载能力, 提高经济效益; 4.为进一步研究工程结构物的强度、振动、稳定 性、断裂等力学问题,奠定必要的理论基础。
理论上可证明:当一点的应力状态确定时,经推导 必可求出三个实根,即为主应力,且主应力彼此正交。
.
.
*
⑾.静力边界条件
◆ 一个客观的弹塑性力学问题,在物体边界上 任意一点的应力分量和面力分量必定满足这 组方程。
◆ 面力分量指向同坐标轴正向一致取正,反之 取负。
.
*
◆ 当边界面与某一坐标轴相垂直时,应力分量 与相应的面力分量直接对应相等。
.
*
2、几何假设——小变形条件
(1)在弹塑性体产生变形后建立平衡方程时,可以 不考虑因变形而引起的力作用线方向的改变;
从而使得平衡条件与几何变形条件线性化。
(2)在研究问题的过程中可以略去相关的二次及二 次以上的高阶微量;
假定物体在受力以后,体内的位移和变形是微小 的,即体内各点位移都远远小于物体的原始尺寸,而 且应变( 包括线应变与角应变 )均远远小于1。根据 这一假定:
.
*
五、 弹塑性力学的基本假设
(1)连续性假设:假定物质充满了物体所占有的 全部空间,不留下任何空隙。
(2)均匀性与各向同性的假设:假定物体内部各点 处,以及每一点处各个方向上的物理性质相同。
1、物理假设:
(3)力学模型的简化假设: (A)完全弹性假设 ;(B)弹塑性假设。
可归纳为以下几点: 1.建立求解固体的应力、应变和位移分布规律的 基本方程和理论; 2.给出初等理论无法求解的问题的理论和方法, 以及对初等理论可靠性与精确度的度量; 3.确定和充分发挥一般工程结构物的承载能力, 提高经济效益; 4.为进一步研究工程结构物的强度、振动、稳定 性、断裂等力学问题,奠定必要的理论基础。
理论上可证明:当一点的应力状态确定时,经推导 必可求出三个实根,即为主应力,且主应力彼此正交。
.
桁架弹塑性分析..
F1 F3
P s A 2 cos
继续加载,杆1、3也达到屈服,结构丧失承载能力。 极限载荷Pl: Pl s A(1 2 cos )
Pl 1 2 cos Pe 1 2 cos3
•A点位移Δ分析
P小于或等于Pe时,
y 2l
当Pe <P<Pl时,
卸载: 杆1,2和3均发生弹性变形。设卸载量为 P
2 y P A(1 2 cos )
3
,
1 3
P cos2 A(1 2 cos )
3
,
Pl EA(1 2 cos3 )
Pl
3
杆中应力
2 s
P A(1 2 cos )
| 2 | s ,
2r s (1 P / Pe ) 0,
?
完全卸载时残余应变:
1r 3r
2r yr / l
P / Pe 1 s 0, 2E cos
P EA(1 2 cos )
3
( P s A) 2 EAcos
当
杆1和3进入塑性变形状态
Ql Qe
由于杆2始终不受力,此时继续加载,变形无限制。故
x s l1 / sin
x s l /(E sin cos )
• 不同加载路径的影响
路径1: 加竖向载荷至极限状态,保持竖向位移不变,再加水平载荷至极限状态
B C D 加载 步1 B C D
已知:三杆材料相同,弹性模量均为E; 横截面积相同,均为A,l1=l3,l2=l,试 讨论杆系的极限载荷和A点的铅垂位移 Δ。 l 解:在载荷P 较小时,杆系处于弹 性状态,各杆轴力为:
《弹塑性力学》幻灯片

弹塑性力学根本方程
• 弹塑性力学的根本方程是: • 〔1〕平衡方程; • 〔2〕几何方程。 • 〔3〕本构方程。 • 前两类方程与材料无关,塑性力学与弹性力学的主要
区别在于第三类方程
1.2 弹塑性力学开展历史
• 1678年胡克〔R. Hooke〕提出弹性体的变形和 所受外力成正比的定律。
• 19世纪20年代,法国的纳维〔C. I. M. H. Navier 〕、柯西〔A. I. Cauchy〕和圣维南〔A. J. C. B. de Saint Venant〕等建立了弹性理论
M r F
2.2.4 三重积
• 三重标量积:
u1 u2 u3 U(VW)v1 v2 v3 (UV)W
w1 w2 w3
• 称为三重标量积或框积,是以U、V、W 为边的平行六面体的体积或体积的负值。 可用[U,V,W]来表示。
U ( V W ) ( U W ) V ( U V ) W
2.2.5 标量场和矢量场
• 函数 (x1,x2,x3)c 称为一个标量场,
梯度 grade1x1e2x2e3x3 (,,)
x1 x2 x3
• 构成矢量场, 垂直于 =常数的外表。
• 矢量的散度:
Vv1v2v3 x1 x2 x3
• 矢量的旋度:
e1
e2
e3
Vcurl/V x1 /x2 /x3
v1
v2
v3
2.3 张量
• 1.3.1 指标记法和求和约定 • 1.3.2 ij 符号〔Kronecker符号〕 • 1.3.3 ijk 符号〔交织张量〕 • 1.3.4 坐标变换 • 1.3.5 笛卡尔张量 • 1.3.6 张量性质
2.3.1 指标记法和求和约定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6
(+) Pl 4
b
s
maxs
理想弹塑性模型
Me sW a
14
P
h
(+) Pl 4
b
进入屈服
s
max
M W
M bh2
2e
6
maxs
s
理想弹塑性模型
M 2 ( h 2 e ) b s• 1 2 ( h 2 e ) as W z ' ( h 4 2 e 2 ) b s 3 2 b 15 s e 2
塑性铰
Mu
Mu
C
Pu
Mu
只有一种可能的 可动机构情况
根据虚功原理
P u••2 lM u•M u•M u•
外力虚功
a
内力虚功
Pu
6 Mu 2l4
例题 AB
需要2个塑性铰,
P
D 才能成可动机构
a
aC a
A,B,C都可能成为 塑性铰
P
有三种可能的可
动机构情况
Mu
Mu Mu P
2
2
第一种: A, B处出现塑性铰
第十七章 简单弹塑性问题
▪概述 ▪简单桁架的弹塑性分析 ▪圆轴的弹塑性扭转 ▪梁的弹塑性弯曲
a
2
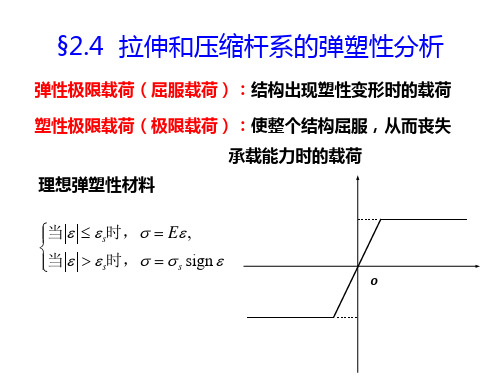
§17-1 概述
• 到现在为止,研究的材料性能都是考虑弹性阶 段,强度问题为:
max[]nu
极限应力 抗拉强度或抗压
强度(脆性)
脆性材料过了 b就发生了脆性断裂,可是塑性材料过了 s,进入屈服阶段,接着还有强化阶段,最后进入局部变
P
h
整截面屈服
(+) Pl 4
M e=0(h4 M2 u e2h)4b2bs s 3 2bse2 a
b
s
s
理想弹塑性模型
Mu 6 1.5
Me 4
16
P
塑性铰 的形成
a
17
塑性铰(plastic hinge)的力学模型
Mu
Mu
与普通铰相比,塑性铰
是个概念或力学模型
能承受弯矩Mu 单向铰
注意Mu的方向
赠言
子曰:知之者不如好之者,好之者不如乐之者。
《论语·雍也篇》
孔子说:知道学问不如喜好它,喜好它不如以它为快
乐。
孟子曰:羿之教人射,必志于彀;学者亦必志于彀。
大匠诲人必以规矩,学者也必以规矩。
彀(gou):张满弓弩
《孟子·告子上》
孟子说:后羿教人射箭,必意向拉满弓。学习者也要
“拉满弓”。大匠人以规a矩教诲人,学习者也要守1 规
可变机构
N度超静定梁 N+1个塑性铰
a
21
超静定梁极限载荷的确定
P
3 Pl 16
A
Mu
C
5 Pl 32
P
C
1度超静定梁 2个塑性铰=极限状 态
B 塑性铰先出现在A
静定梁
C出现塑性铰时,梁
a
失去承载能力 Pu 22
利用极限定理确定极限载荷
极限定理:在各种可能的机构中,形成机构最 小的载荷,就是结构的极限载荷。
方法: (1)设定梁成为可动机构的所有可能塑性铰情况 (2)利用虚功原理,计算每种可动机构的极限载荷 (3)选取所有极限载荷中最小者,为结构的极限载荷
虚功原理:外力在任何可能位移上所作的虚功恒 等于内力在虚位移导致的虚变形上所作的虚功。
a
23
P
需要2个塑性铰,
A
B
才能成可动机构
C
只有A,C可能成为
Mu
Mu
P
P • a M u • M u • M u •
P 3Mu a
a
26
比较知,三种情况中,最小者为
Pu
3 Mu a
作业:17.5,17.12(e)
a
27
本章小结
• 构件的弹塑性设计 • 理想弹塑性模型 • 弹性极限载荷,极限载荷 • 塑性铰 • 极限定理
a
28
a
29
a
30
大学课件出品 版权归原作者所有 联系QQ :910670854 如侵权,请告知,吾即删 更多精品文档请访问我的个人主页
杆3 首先进入塑性,这时
P
P esA(12co3s) :弹性极限载荷
a
9
继续增大载荷,1,2,3 杆全部进入塑性:
12 s
Pu 2N1cos N3 sA(12cos )
Pu 12cos Pe 12co3s
a
3
1
2
P
10
§17-3 圆轴的弹塑性扭转
扭矩T
Te
TR Ip
Te R Ip
s
Te
s
R
Ip
a
11
扭矩T
s
Tu
s
r s
T dA 2 2d
r 0
2
2
s
r
d
R r
2
2 s d
Tu
2 3
s
R3
s (4 R 3 r 3 )
6
a
12
§17-4 梁的弹塑性弯曲
P
h
弹性范围
max
M W
M bh2
6
(+) Pl 4
b
s
m axs
a
理想弹塑性模型13
P
h
开始屈服
max
M W
M bh2
N1
N2
P
2cos
1
2
N1 A
1
两杆同时进入塑性,
12s, N 1sA
这P 时 2sA , co P su:极限载荷
Pmax[P]
Pu n
a
2
B P
P Pu
B点向下 无限运动
8
2N1co sN3P 平衡方程
l3
l1
cos
协调方程
N1
N2
Pco2s 12co3s
P
N3 12co3s
3
1
2
梁弯曲时,总轴力为零,
N A
s d A A s d A s(A A ) 0
确定塑性中性轴的位置
A A A 2
有一个对称轴截面的塑性中性轴不一定是 这个对称轴;有两个对称轴截面的塑性中 性轴就是其中一个对称轴。
T形梁的弹性中性轴与塑性中性轴不重合
a
20
塑性铰与机构
P
P
静定梁 一个塑性铰
形阶段,然后破坏。
a
3
认为屈服就破坏,这是弹性设计的概念。按照 弹性设计的构件工作时只允许发生弹性变形。 安全性与经济性的平衡:工程师必须考虑的问题
弹塑性设计:充分利用材料的塑性变形,化有害 为有利。
塑性材料应力应变关系
a
4
column beam
joint
Joint with short link
钢结构:较好的抗震性能,易于建造,造型优美
Joint 通过塑性变形消耗大部分能量,从而增强 抗震作用。
a
5
几种简化弹塑性应力应变关系
s
s
线弹性应力应 变关系
理想弹塑性模型
双线性模型
s
s
a
6
简单构件:杆、扭转轴、梁 更复杂结构的弹塑性行为要借助有限元 等数值分析工具来计算。
a
7
§17-2 简单桁架的弹塑性分析
a
18
载荷极限
极限弯矩对应的外载荷称为极限载荷
Mu
Pu
l 4
形状系数
Pu 4Mu/l
弹性应力: M
Wz
塑性应力:
s
Mu Ws
W z 抗弯截面模量
Wz
bh 2 6
Ws
塑性截面抗弯模量
Ws
bh 2 4
Ws kWz
k Ws 6 1.5 Wz 4
[p530]表1对常见的截面给出了形状系数k。
a
19
塑性中性轴
P
P • 2 a • P • a M u • 2 M u • 2 M u •P
a
M 5 25 a
u
Mu
P
第二种:
2
A, C处出现塑性铰
2
Mu Mu
P
P • 2 a • P • a M u • M u • M u • 2P
4
Mu a
Mu
Mu
P
第三种:
B, C处出现塑性铰