Beckhoff HMI解决方案
BeckhoffHMI解决方案
CX
TwinCAT PLC HMI
• Target Visulization
PC BK or BC
ห้องสมุดไป่ตู้BX
Target Visulization运行于CE系 统的CX控制器中,CX控制器中 需安装TwinCAT Target VisuCE 软件包,通过CX控制器的显示接 口和USB接口外接显示器和鼠标 键盘等外设实现界面的监控。
• 可选图库控件丰富,可作出 多种多样的动态效果
• 功能强劲,多语言、报表、 趋势、配方…等较易实现
• 针对Beckhoff控制通讯需要 建立专用的Tag(除ZenOn) ,并需要做相应的配置
• 价格相对较贵
第三方触摸屏
• 功能介于前两者之间,鉴于 其结合硬件后的价格适中, 选择它的用户较多
• 开发界面的分辨率受到硬件 限制,改用不同尺寸的硬件 需要重新排列画面组件
b、编辑简便快捷,无需建立专用Tag,可直接调用PLC中定义 的任何变量;
c、支持多种HMI常用功能:基本元件(矩形、椭圆、多边形、 弧、位图、按钮、表格、趋势图、棒图、指针等);动态图 形(文本显示、可见/不可见、水平垂直移动、旋转、缩放 等;输入(文本输入、画面切换、语言切换、执行外部程序 等;
TwinCAT PLC HMI
• Visulization
Visulization运行于安装有
TwinCAT的PC,集成在
PC
TwinCAT PLC Contrl中,若需
独立于 TwinCAT PLC Control
全屏运行,则需在PC中再安装
TwinCAT_PLC_HMI软件包。
BK or BC BX
• 大部分触摸屏与Beckhoff控 制器通讯只支持Modbus RTU或Modbus TCP协议, 使用Modbus RTU通讯一般 要求用户自己制作通讯线缆
twincat eni文件生成方法-概述说明以及解释
twincat eni文件生成方法-概述说明以及解释1.引言1.1 概述Twincat是一款由德国Beckhoff公司开发的自动化软件平台,它可以用于控制工程、运动控制、HMI(人机界面)和数据采集等领域。
在Twincat 中,eni文件是一种重要的配置文件,它包含了工程项目的各种信息,如硬件配置、通信设置、变量声明等。
在本文中,我们将重点讨论Twincat eni文件的生成方法。
通过了解如何生成eni文件,我们可以更好地理解Twincat工程项目的配置过程,提高工程开发的效率和质量。
同时,掌握eni文件的生成方法也有助于我们更好地应用Twincat软件平台,实现自动化控制系统的设计和实施。
因此,本文对于Twincat开发者和工程师具有重要的参考价值。
1.2文章结构文章结构部分主要描述了整篇文章的组织结构和内容安排。
在本文中,文章结构如下:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 Twincat eni文件的概念和作用2.2 Twincat eni文件生成方法2.3 Twincat eni文件的应用场景3. 结论3.1 总结Twincat eni文件生成的重要性3.2 未来发展趋势展望3.3 结束语通过以上结构,读者可以清晰地了解到本文将分为引言、正文和结论三个部分,每个部分具体包含的主题内容。
文章结构的合理安排有助于读者更好地理解文章内容,同时也能够使文章看起来更有条理和逻辑。
1.3 目的Twincat eni文件生成方法是为了帮助工程师更有效地创建ENI文件,提高开发效率和质量。
通过了解ENI文件的概念和作用,以及掌握生成方法,工程师可以更好地理解和控制设备和控制系统之间的通讯方式。
同时,本文旨在指导工程师在实际项目中如何应用Twincat eni文件,以满足不同的应用场景需求。
最终,本文旨在强调Twincat eni文件生成的重要性,并展望其未来发展趋势,为读者提供全面的知识和实践指导。
倍福科技自动化产品和应用案例

4通道热电偶输入模块, EL3314-0010
高精度, 开路识别
仿真 复杂控制
2011/11/9
EL3602-0010
型号电压-75…+75 mV, 测 量错误< ±0.05 % at 25 °C
全量程、 50 Hz 滤波)
数字万用表模块
EL3681
EL3125
2通道模拟量输入模块 0…20 mA, 超采样差分输
2011/11/9
7
倍福科技自动化技术应用领域---测试测量仪器
测试测量 机器人 仿真 复杂控制
2011/11/9
高级调试诊断 测试测量仪器 图像视觉 运动控制&机器人
仿真
复杂控制
8
倍福科技自动化产品---测试测量状态监测领域
测试测量
机器人
震动
噪声
温度 重量
油体分析 能量监测
仿真
复杂控制
2011/11/9
问题。 § 高效率的软件接口,无需实施CPU之间的复杂通讯。
仿真
复杂控制
2011/11/9
27
倍福科技自动化产品---机器人控制运动学模型
测试测量 机器人 仿真 复杂控制
2011/11/9
Cartesian Portal Roll kinematic (H-Bot)
Scara
Shear kinematic 2D Parallel kinematic
Scalability
Multicore Realtime
Supporting Standards
Supplements
Experience
Connectivity
Openess
Beckhoff吹瓶机界面简介
• 标准移模曲线:
设定速度:越大越快 减速度:越小,时间3越长 加速度:越小,时间1越长 爬行速度 自锁电压
1
2
3
4
5
实际曲线输出:
面板,带 控制功能
EtherCAT总线
可以多个站 点,接线方 便,线更少 通过总线技术, 甚至可以直接带 伺服电机。机械 手或全电动可 用。
断电保持型检测 数据
管理页面
系统信息 可以设置任何需 要的语言
其它设置 单位设置,系统 自动转换
在任何页面点击该 按钮可以快速切换 语言,操作方便
泰文
英文
截屏按钮
方便的截屏功能, 可以截取任何屏幕 画面,帮助故障诊 断
保存到U盘,就可 以发送给任何需 要的人
最多可以设 置5个用户级 别 简单易用的 Windows用 户属性页面
工程师设置其它人员不开放时间页面时间页面左右设置值对拷功能定时加热页面吹气曲线页面最多可以20段可以设置任何复杂的吹气曲线横坐标和纵坐标自动适应检测页面可以检测油温螺杆压力电流力矩等任何需要检测的变量同时具备报警功能断电保持型检测数据管理页面可以设置任何需要的语言其它设置单位设置系统自动转换系统信息在任何页面点击该按钮可以快速切换语言操作方便英文截屏按钮方便的截屏功能可以截取任何屏幕画面帮助故障诊保存到u盘就可以发送给任何需要的人最多可以设置5个用户级简单易用的windows用户属性页面配方页面可以从usb下载上载实时的输入输出检测显示了线号不需要接线图就可以知道是哪条线报警页面调校及轴设置页面如何调校一个轴请先确认已经切换到了调校模式
The end , Thank You!
Beckhoff Blow Molding Controller
第6章_TwinCAT库文件

6. TwinCAT库文件 (172)6.1. 温控库 (172)6.1.1. 简介 (172)6.2. 控制工具箱TcPlcControllerToolbox.lib (172)6.2.1. 滤波 (172)6.2.2. PID (174)6.2.3. PWM输出 (175)6.2.4. 设定点发生器SetpointGeneration (176)6.3. 调用Windows和TwinCA T功能的库TcUtility.lib (177)6.3.1. 调用Windows的功能 (177)6.3.2. 读取IP地址和修改注册表 (178)6.3.3. 启动和停止应用程序 (179)6.3.4. 内存操作 (180)6.3.5. 调用TwinCAT System Manager的功能 (181)6.3.6. BCD码转换 (181)6.4. EtherCAT主站和从站的控制TcEtherCAT.lib (182)6.4.1. EtherCAT状态切换 (182)6.4.2. EtherCAT从站的参数设置 (186)6.4.3. EtherCAT数据包统计 (190)6.4.4. EtherCAT诊断 (190)6.5. 其它有用的库 (190)第171页共1001 页2013-10-256.TwinCAT库文件6.1. 温控库例程及文档:“\配套文档\第6章_TwinCA T库文件\1 温控库\\温度库例子V1.1\说明”作者是倍福广州分公司的Swen Chen。
1,使用DEMO程序之前,请观看视频“\温度库例子V1.1\说明\温度库说明_Swen.exe”。
2,温控所需要的库文件在“\温度库例子V1.1\Lib\TcTempCtrl.lib”。
3,详细的温控库说明:“\温度库例子V1.1\说明\TcPlcLibTempControl.CHM”。
4,BECKHOFF的温控解决方案:“\配套文档\第6章_TwinCA T库文件\1 温控库\基于PC的温度控制解决方案.pdf”。
BECKHOFF产品简明操作指南_彩色
BECKHOFF产品简明操作指南_彩色1.BECKHOFF控制器操作指南(a)上电和初始化控制器:将控制器连接到电源,并确保所有必需的电缆正确连接。
然后,按下电源按钮启动控制器。
在初始化过程完成后,可以通过配置软件进一步配置控制器。
(b)配置IO接口:BECKHOFF控制器通常具有多个IO接口,用于连接不同类型的传感器和执行器。
可以使用配置软件为每个IO接口分配正确的功能,并设置相应的参数。
(c) 编程控制器:使用BECKHOFF提供的编程软件进行控制器编程。
BECKHOFF支持多种编程语言和开发环境,如TwinCAT和CODESYS。
根据您的需求选择合适的工具,并使用其提供的函数和API进行编程。
2.BECKHOFF伺服驱动器操作指南(a)连接伺服驱动器:将伺服驱动器连接到控制器,并确保所有必需的电缆正确连接。
在连接完成后,将伺服驱动器的电源开关打开。
(b)配置驱动器参数:使用BECKHOFF提供的配置软件进行驱动器参数的配置。
参数包括控制模式、加速度、速度限制等。
根据您的应用需求进行适当的参数设置。
(c)运行伺服系统:完成驱动器参数配置后,您可以开始运行伺服系统。
使用控制器上的操作面板或编程软件发送运动指令,驱动伺服电机运动。
3.BECKHOFF触摸屏操作指南(a)启动触摸屏:将触摸屏连接到控制器,并确保所有必需的电缆正确连接。
将电源开关打开,触摸屏将自动启动。
(b)配置触摸屏界面:BECKHOFF触摸屏可以根据用户需求进行界面配置。
可以使用触摸屏软件进行界面设计,包括添加按钮、文本框、图表等元素。
您可以根据需要创建多个界面,并在触摸屏上进行切换。
(c)与控制系统交互:使用触摸屏上的按钮、滑块等元素与控制系统进行交互。
触摸屏可以接收用户输入,并将相应的指令发送给控制器。
同时,它还可以显示控制系统的状态信息,如传感器值、报警信息等。
综上所述,BECKHOFF产品的操作相对简单,通过正确的连接和配置,您可以轻松地实现各种工业自动化应用。
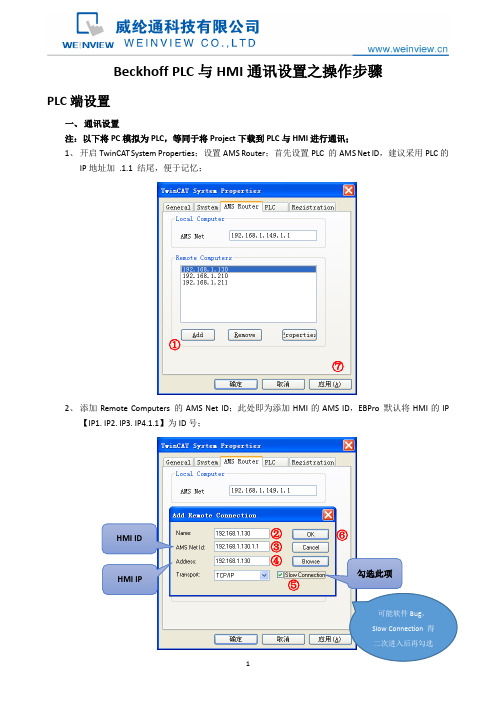
Beckhoff PLC与HMI通讯设置之操作步骤_20150129
③
④
12
⑥
⑤ ⑥
⑦ ⑥
13
新建一个位元件: 意事项: 1、 定义数组变量下标须从 0 开始,如: ascAxProcess: ARRAY [0..10] OF T_HMIaxProcess 2、 会连续占用多个寄存器的控件,需定义为二维数组变量类型,如 PLC 控制、移动图形、动画、 数据群组、XY 曲线等; 3、 可通过“标签编辑器”编辑、新增所需要之变量;如下举例,新增二维数组变量:
IP 地址加 .1.1 结尾,便于记忆;
① ⑦
2、 添加 Remote Computers 的 AMS Net ID;此处即为添加 HMI 的 AMS ID,EBPro 默认将 HMI 的 IP 【IP1. IP2. IP3. IP4.1.1】为 ID 号;
HMI ID HMI IP
② ③ ④
⑤
1
⑥
②
①
在“PLC 控制”中,新增“PLC 切换基本窗口” 寄存器:
15
③ ④
⑤
②
③
①
④
⑤
16
9
点击“导入”按钮:
①
②
③
④
导入成功,点击“确定”,然后 “离开”;
10
提示不支持的 数据类型
导入成功,查看 到所有的 Tag
① ②
11
三、 创建界面 建立一个数值输入元件: 选择“PLC 名称”—>选择“标签”—>直接选择所需要的 Tag;或者通过“寻找”,查找到所需要的 标签;支持模糊查询:即输入不完整的 tag,搜寻到符合条件的 tag;
勾选此项
可能软件 Bug, Slow Connection 得 二次进入后再勾选
kl2794beckhoff工作原理

kl2794beckhoff工作原理
Beckhoff KL2794是一款高精度、高可靠性的数据采集模块。
它的工作原理可以简单
地概括为,将传感器采集到的模拟信号转换为数字信号,并通过总线传输至主机让主机进
行处理。
具体而言,KL2794通过内置的ADC(模数转换器)将模拟量信号转换为数字量信号,
并根据其采样频率和分辨率进行滤波和处理,以保证采集数据的精度和稳定性。
此外,
KL2794还配备了独立的刻度模块,可以在不同量程下对信号进行线性校准,进一步提高采集数据的准确性。
KL2794的数据传输采用了高速总线技术,如Profibus、CANopen、Ethernet等,以确保数据的实时性和快速性。
具体而言,KL2794通过总线发送采集数据,并在主机端接收处理指令以及配置信息,以实现数据的自动化采集和处理。
总体来说,KL2794的工作原理是将传感器采集到的模拟信号进行数字化、滤波处理并通过总线传输至主机端进行处理和展示,以实现高精度、高可靠性的数据采集和处理任务。
它的应用范围广泛,涵盖了工业自动化、机器人控制、医疗设备、环境监测、能源管理等
众多领域,可以为用户提供高效、可靠、精确的数据采集和处理服务。
twincat2教程案例
twincat2教程案例
Twincat 2是Beckhoff公司开发的一款用于工业自动化控制系统的软件平台。
它结合了PLC、运动控制、HMI、数据采集等功能,为工业自动化系统提供了全面的解决方案。
下面我将从不同的角度为你介绍一些Twincat 2的教程案例。
1. PLC编程,Twincat 2提供了丰富的PLC编程功能,可以实现逻辑控制、数据处理、通讯等功能。
在学习Twincat 2的PLC编程时,可以通过案例来深入理解其编程语言和逻辑结构,例如实现一个简单的流水线控制系统、温度控制系统等。
2. 运动控制,Twincat 2支持多轴运动控制,可以实现各种复杂的运动控制应用,如机械臂、输送带、注塑机等。
可以通过案例学习如何配置运动控制系统、编写运动控制程序、调试运动轴等。
3. HMI设计,Twincat 2提供了丰富的HMI设计功能,可以创建直观友好的人机界面。
通过案例学习如何设计HMI界面、实现数据显示、操作按钮、趋势图等功能。
4. 数据采集与分析,Twincat 2支持实时数据采集和分析,可
以帮助用户监控生产过程、分析生产数据。
可以通过案例学习如何配置数据采集设备、编写数据分析程序、实现报表生成等功能。
通过以上不同方面的案例学习,可以全面了解Twincat 2的功能和应用,提升工程师在工业自动化领域的技能和应用水平。
希望以上介绍对你有所帮助。
伺服系统在工业机器人的应用

伺服系统在工业机器人的应用工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。
而其中,工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。
一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。
伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服系统是以变频技术为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。
伺服系统除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
广义的伺服系统是精确地跟踪或复现某个给定过程的控制系统,也可称作随动系统。
狭义伺服系统又称位置随动系统,其被控制量(输出量)是负载机械空间位置的线位移或角位移,当位置给定量(输入量)作任意变化时,系统的主要任务是使输出量快速而准确地复现给定量的变化。
伺服系统的结构组成机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
伺服系统组成原理框图1、比较环节比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2、控制器控制器通常是计算机或PID(比例、积分和微分)控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行环节执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象被控对象指被控制的物件,例如一个机械手臂,或是一个机械工作平台。
5、检测环节检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
BECKHOFF基于PLCopen的运动控制解决方案

动态修改
Only segment points needed. The intermediate points are calculated depending on the actual function in the NC
20
TwinCAT NC PTP—电子凸轮指令
• MC_CamScaling的指令的功
优点:该方法曲线的实现方法比较简单,不需要编程者有数学建模能力,在凸轮编辑 中根据工艺描点即可
17
TwinCAT NC PTP-—WriteFunctionPoint
该凸轮表 中定义了4 个点 该凸轮曲 线是通过 凸轮工具 描点法实 现的,比较 简单. 该凸轮表 的每个位 置点都可 以在程序 中修改其 位置,以满 足曲线的 变化
能 1.能够动态的拉伸或收缩X轴和 Y轴大小. 2.能够灵活的修改X轴或Y轴的 起始位置. 3.可以灵活的选择何时生效变化 结果.
•MC_ReadCamTableSlaveDyn amics. 1.通过输入主轴位置,计算出相 应Cam Table表的从轴位置. 2.由以上得到从轴位置,可以在 凸轮表的任一位置去启动凸轮曲 线.
BECKHOFF基于PLCopen的运动控制解决方案
Drive Technology
10.01.2013
1
TwinCAT NC PTP 功能
普通定位运动(Point to Point) 电子齿轮同步 数字凸轮开关
凸轮轴
运动叠加(合成)
飞剪
2
TwinCAT NC PTP--PLCopen 功能块概览
Done MC-Stop
Done
Homing MC_Stop MC_Home Standstill MC_Power
倍福运动控制技术介绍

Beckhoff 运动控制实现方式TwinCAT NC PTP,NCI,CNC
逻辑运算 与处理
PLC NC PTP
位置,速度 加速度控制
路径规划 闭环控制
同步,凸轮 飞剪等
通用插补
PLC NC PTP
NC I
NC PTP
NC I
CNC
TWINCAT –PC Control PLC/NC PTP/CNC
1 D+ SSI data input D+ 4 CL+ Clock output CL+
5 D- SSI data input D8 CL- Clock output CL21
Beckhoff运动控制—驱动解决方案 编码器----增量式编码器
KL5101
22
Beckhoff运动控制—驱动解决方案 编码器----增量式编码器
自动化新技术
BECKHOFF运动控制产品介绍
Drive Technology
18.12.20ห้องสมุดไป่ตู้2
1
运动控制器 --基于Windows XP 和CE的IPC EPC
IPC 嵌入式PC
2
运动控制系统基石---现场总线及I/O
3
适用于高动态定位任务的驱动系统
直线伺服电机 ALxxxx
同步伺服电机 AM2000/AM3xxx
Interpolated
…
AccelerationProfile
数字式紧凑型伺服驱 动器 AX5xxx
数字式紧凑型伺服驱 动器 AX20xx
Drive Technology
18.12.2012
4
AX5000 | 数字式紧凑型伺服驱动器
倍福hmi强制类型转换

倍福hmi强制类型转换摘要:一、引言二、倍福hmi 的概念与作用三、强制类型转换的意义四、倍福hmi 强制类型转换的具体实现五、强制类型转换带来的优势与挑战六、总结正文:一、引言作为人机界面(HMI) 的一种,倍福hmi 在工业自动化领域得到了广泛应用。
然而,在实际操作过程中,倍福hmi 的强制类型转换问题也不容忽视。
本文将对倍福hmi 强制类型转换进行详细解析。
二、倍福hmi 的概念与作用倍福hmi,即倍福人机界面,是德国倍福公司生产的一款高性能人机界面产品。
它具有丰富的硬件和软件功能,可以实现对工业现场设备的实时监控、操作和管理。
倍福hmi 在工业自动化领域的主要作用是提高生产效率、降低操作复杂度和保障生产安全。
三、强制类型转换的意义在倍福hmi 的编程过程中,强制类型转换是一个重要的概念。
强制类型转换是指将一种数据类型的值转换为另一种数据类型的过程。
通过强制类型转换,倍福hmi 可以实现不同数据类型之间的相互转换,从而满足不同场景下的编程需求。
四、倍福hmi 强制类型转换的具体实现在倍福hmi 中,强制类型转换可以通过类型转换函数来实现。
例如,将一个整数类型的值转换为浮点数类型,可以使用如下代码:```浮点数= 整数* 1.0```同样地,将一个浮点数类型的值转换为整数类型,可以使用如下代码:```整数= 浮点数// 1.0```其中,“//”表示整数除法,结果为整数。
五、强制类型转换带来的优势与挑战强制类型转换为倍福hmi 带来了诸多优势,如提高了程序的灵活性,简化了编程过程等。
然而,强制类型转换也存在一定的挑战,如可能导致数据精度丢失、增加程序出错的风险等。
因此,在实际编程过程中,需要根据具体需求合理使用强制类型转换。
六、总结倍福hmi 强制类型转换是倍福hmi 编程过程中一个重要的概念。
德国倍福2013年新产品简介

01 2013随着 Windows 7 的问世,多点触摸屏在 PC 上的应用也越来越受到人们的欢迎。
而多点投射式电容触控技术主要应用于工业领域。
显示器正面使用一块防眩光玻璃板构成。
即使带了手套也能够轻松响应触摸操作。
即使手指间的距离只有 1 cm ,五只手指也能够被单独检测出来。
这两种系列的多触点控制面板专为控制柜安装以及安装臂安装而设计。
CP29xx 系列嵌入式面板的前面板防护等级为 IP 65,后面板防护等级为 IP 20。
CP39xx 系列控制面板适合安装臂安装,所有表面的防护等级均为 IP 65。
操作人员可在距离工业 PC 远达 50 m 的地方操作带 DVI/USB 扩充接口的控制面板。
新产品:用于多触点控制面板的安装臂适配器用于 CP3xxx 系列控制面板的安装臂适配器可旋转且可向前和向后倾斜 20°。
带 48-mm 管的标准安装臂系统可与适配器连接。
安装臂可从(C9900-M750)上方或(C9900-M751)下方选配安装。
CP2xxx 和 CP3xxx系列多触点控制面板带安装臂适配器 C9900-M750和 USB 接口 C9900-E274 的CP39xx 系列控制面板CP29xx 系列嵌入式控制面板后视图2使用第三代 Intel ® Core™ i5 和 i7 的 PC高性能控制面板:采用 Intel ® ®的 CP77xx 系列面板型 PCBeckhoff 将第三代 Intel ® Core™ i5 和 Core™ i7 处理器引入到其最新的基于工业 PC 的控制技术中。
时钟频率明显提升、图形处理器性能明显改进。
多核处理器可与专为配合其使用而开发的 TwinCAT 3 组合使用。
具有高计算能力和低能耗的控制面板:Beckhoff 坚固耐用型 CP77xx 系列面板型 PC 在一个轻薄小巧、防水防尘的铝制机箱(防护等级为 IP 65)内集成了一台 TFT 显示器和一台 PC 。
市面上常见HMI品牌介绍
市面上常见HMI品牌介绍1. 欧姆龙(Omron):欧姆龙是一家在工控和自动化领域具有丰富经验的国际公司,其HMI 产品系列广泛应用于自动化生产线、工业流水线等领域。
欧姆龙的HMI产品具有易于操作、高可靠性和可扩展性等特点,可帮助企业提高生产效率和降低成本。
2. 西门子(Siemens):西门子是一家享有盛誉的德国工业自动化和数字化公司,其HMI产品系列被广泛应用于工业控制、过程控制和制造执行系统中。
西门子的HMI 产品拥有先进的人机界面和多功能显示屏,可以方便操作人员实时掌握生产状态和数据,提高系统的可靠性和效率。
3. 艾默生(Emerson):艾默生是一家全球领先的工业技术和自动化解决方案提供商,其HMI 产品被广泛应用于化工、石油、制药等行业。
艾默生的HMI产品具有先进的人机界面、高分辨率的显示屏和强大的数据处理能力,可以帮助用户实时监控和控制各种工艺参数,提高生产效率和安全性。
4. 壳牌(Beckhoff):壳牌是一家德国工控自动化领域的知名品牌,其HMI产品广泛应用于工业控制和过程控制系统中。
壳牌的HMI产品具有先进的图形界面、高性能的处理器和丰富的通信接口,可以实时监控和控制各种生产参数,提高生产效率和质量。
5. 威纶达(Weintek):威纶达是一家台湾知名的HMI品牌,其产品系列广泛应用于自动化领域。
威纶达的HMI产品具有用户友好的界面、高清晰度的显示屏和灵活可扩展的功能,可以满足各种行业的需求。
6. 三菱电机(Mitsubishi Electric):三菱电机是一家全球知名的工业自动化公司,其HMI产品广泛应用于工厂自动化和机器人系统中。
三菱电机的HMI产品具有直观易用的人机界面、高亮度的显示屏和丰富的通信接口,可以方便操作人员实时监控和控制设备,提高生产效率和灵活性。
以上介绍的品牌只是市面上常见的一部分,每个品牌的产品特点和应用领域均有所不同,用户可以根据自己的需求选择合适的HMI品牌。
如何正确使用Beckhoff产品_2006.01

如何正确使⽤Beckhoff产品_2006.01 BECKHOFF⾃动化新技术倍福中国2006年全国销售会议资料如何正确使⽤BECKHOFF 产品(硬件部分)2006年1⽉⽬录第四章正确使⽤Beckhoff 产品(硬件部分) (5)4.1 综述 (5)4.1.1 K-bus 本地总线控制技术 (5)4.1.2 Lightbus 总线技术 (5)4.1.3 通⽤现场总线技术 (5)4.1.4 TwinCAT 实时核技术 (6)4.1.5 EtherCAT 实时以太⽹技术 (6)4.1.5.1 I/O层超⾼速实时以太⽹ (6)4.1.5.2 ⼯作原理 (6)4.1.5.3 端⼦实现以太⽹ (6)4.1.5.4 协议 (7)4.1.5.5 性能 (7)4.1.5.6 EtherCAT 替代PCI (8)4.1.5.7 拓扑结构 (8)4.1.5.8 分布时钟 (8)4.1.5.9 热连接 (8)4.1.5.10 诊断 (9)4.1.5.11 总线端⼦ (9)4.1.5.12 开放性 (9)4.2 产品分类 (9)4.2.1 IPC 类产品 (9)4.2.2 嵌⼊式 PC CX1000 类产品 (10)4.2.3 现场总线类产品 (10)4.2.4 驱动技术类产品 (13)4.2.5 TwinCAT 类产品 (13)4.3 常见问题问答 (14)4.3.1 IPC 类 (14)A001. 使⽤⼯控机应注意的问题 (14)产品中常见技术术语的定义和解释(CP-Link,ADS) (15)A002. BeckhoffA003. 如何解决⼯控机和CX系列的耐温问题? (16)A004. 如何使⼯控机保持安全运⾏ (16)4.3.2 嵌⼊式 PC CX1000 类 (17)B001. 如何恢复 CX1000 /doc/61b15de9daef5ef7ba0d3cb9.html 的出⼚设置 (17)B002. CX1000 系统的供货时间是多长? (18)B003. 什么情况下选⽤ /doc/61b15de9daef5ef7ba0d3cb9.html 和 Windows XP 嵌⼊式操作系统? (18) B004. 如何选择闪存⼤⼩(Windows /doc/61b15de9daef5ef7ba0d3cb9.html /Windows XP 嵌⼊式)? (18) B005. 什么情况下使⽤ 16/32 MB 和 64/128 MB 内存? (19)B006. 什么情况下使⽤ CF 卡和 IBM 微型驱动硬盘? (19)B007. 哪⾥可以找到 CX1000 的技术⽂档资料? (19)B008. 哪些选件(如:现场总线接⼝、附加的串⾏接⼝) 是预安装件,哪些选件可单独订货? (19)B009. CX1000 系统可以连接多少个现场总线接⼝,如何对它们进⾏组态? (20)B010. 能否使⽤ 2 个 CX1000 CPU ⽤于冗余系统? (20)B011. 现有的现场总线接⼝能否既⽤于 Windows /doc/61b15de9daef5ef7ba0d3cb9.html ⼜能⽤于Windows XP 嵌⼊式系统? (20)B012. 什么情况下使⽤ CX1000 带 TwinCAT (PLC 或 NC PTP) 软件的全版本(包括编程/组态⼯具) 或使⽤只安装有运⾏核软件的版本? (20)B013. 需要在我的 CX1000 中注册 TwinCAT (PLC 或 NC PTP 运⾏核) 吗?(20)B014. 当更换⼀套新的 CF 卡时,需要重新注册 TwinCAT (PLC 或 NC PTP 运⾏核) 吗? (20)B015. 在我⽤ CF 卡安装新的映像(更新)后,CX1000 如何检测我在 CX1000 上安装有 TwinCAT PLC (或 NC PTP 运⾏核)?(20)B016. 在 CX1000 上使⽤ TwinCAT NC PTP,可以运⾏多少个轴? (20)B017. CX1000 可以运⾏ TwinCAT NCI 吗? (20)B018. 哪些可视化软件可以⽤于 Windows /doc/61b15de9daef5ef7ba0d3cb9.html 和 Windows XP 嵌⼊式操作系统? (21)B019. 什么情况下使⽤ SCADA 软件和微软开发⼯具? (21)B020. Windows /doc/61b15de9daef5ef7ba0d3cb9.html 和 Windows XP 嵌⼊式映像为何不同,它们之间的区别是什么? (21)B021. 我的应⽤程序可以使⽤多少 RAM ? (21)B022. 我可以更新新的映像版本吗? 如何做? (21)B023. CX1000 的性能如何? (21)B024. 哪些型号的控制⾯板可以⽤于 CX1000? (22)B025. CX1000 可以连接多少个本地端⼦ CX1000? (22)B026. CX1000 中如何与 UPS 系统连线? (22)B027. CX1000 的启动时间是多少? (22)B028. 什么类型的设备可以连接到 USB 接⼝? (22)B029. CX1000 完成了哪些认证并取得了哪些认证证书? (22)B030. CX1000 除可以运⾏于 Windows 操作系统以外,还可以运⾏于哪些操作系统? (22)B031. CX1000 系统能预安装⽤户⾃⼰定制的映像吗? (23)B032. 可以同时使⽤ CX1000-N002 (2xRS232) 和 CX1000-N005 (2xRS422/485) 模块吗? (23)B033. 为什么在样本中出现的导向开关不可⽤? (23)4.3.3 现场总线类 (24)C001. 如何正确设定现场总线的波特率?组⽹时应注意的问题。
基于 PC 的激光切割控制解决方案
Beckhoff®、TwinCAT®、EtherCAT®、Safety over EtherCAT®、TwinSAFE® 和 XFC® 是德国倍福自动化有限公司的注册商标。本手册中所使用的其它名称 可能是商标名称,任何第三方为其自身目的而引用,都可能触犯商标所有者的权利。
Debugging
TcCOM
TcCOM
Task
PLC
Call
TcCOM
NC Task
TcCOM
TcCOM
TwinCAT Real-time Kernel
Task
C++ Module
Task
Task
CNC
TcCOM
Task
Байду номын сангаас
TcCOM
Call Simulink® Module
Call PLC
TcCOM
Task
N10 Z[DIST_CTRL SET_POS=30] N20 Z[DIST_CTRL ON] … Nxx Z[DIST_CTRL OFF]
预先设定随动高度为 30 启动随动控制
关闭随动
这种 CNC 随动的控制方案,只需要客户编写极少量的 PLC 代码就可以完成。为客户快速开发原型机提供了可能。并且 由于该功能是内核级别的功能,已经得到了非常严格的测试,运行非常稳定。这对于随动控制非常重要,因为不稳定 的随动系统,会引起切割头撞板事故,情况严重的可能损害切割头。
Set position of interpolator (PCS)
+
BECKHOFF基于PLCopen的运动控制解决方案

TwinCAT NC PTP—电子凸轮指令
应用案例:膜包机,卸箱机
14
TwinCAT NC PTP-—WriteFunction
建立凸轮数据表的数组,该数组内数据的数量根据客户工艺曲线的需要.如 512,1024,4096个. 通过自己进行数学建模,通过分段函数的方式,实现各类复杂曲线.本质上复杂 的工艺曲线如旋切,追剪以及各类特殊工艺曲线都是由这种方法实现的. 该类凸轮曲线的优点是:非常灵活,可以满足一切工艺曲线的需求.
绝对值定位:执行机构移动到设定的坐 标位置,实现绝对值定位。
相对值定位:执行机构移动设定的位置 值,是一种增量的定位方式.
Drive Technology 10.01.2013 5
TwinCAT NC PTP- --点到点叠加运动
叠加运动指令 该指令用于伺服轴运动过程中进行一个点到点位置的叠加.
Drive Technology 10.01.2013 6
21
TwinCAT NC PTP—MC_CamScaling
MC_CamScaling的指令的效果
CamScaling可以 看成是动态修改曲 线的指令.
不仅仅是使用 offset,主从轴 scaling的方式改变 凸轮曲线.
还可以通过上述的 WriteFunctionPoi nt或 WriteFunction改 变曲线.
A
B Feed
Ratio B:A 2:1
8
TwinCAT电子齿轮同步—龙门钻床
9
TwinCAT NC PTP—电子凸轮指令 Camming
• 主从轴之间非线性耦合 • 凸轮设计遵循 VDI guideline 2143 • 凸轮设计工具 TwinCAT cam design editor
Hmi解决方案

Hmi解决方案
《HMI解决方案:提升生产效率的关键》
在工业自动化领域,HMI(Human Machine Interface)解决方
案起着非常重要的作用。
HMI可以将人与机器连接起来,使
操作人员能够直观地监控和控制生产过程,同时也帮助生产管理人员进行数据分析和决策。
通过HMI解决方案,企业可以
实现生产效率的提升,减少人为错误,降低成本并提高安全性。
HMI解决方案的关键在于提供直观、易用的用户界面,使操
作人员能够快速、准确地获取所需的信息并进行相应的操作。
在设计HMI界面时,需考虑到不同操作人员的需求,确保界
面清晰明了,操作流程简单顺畅。
同时,HMI解决方案还要
兼顾实时性和稳定性,确保在生产过程中能够及时反映最新的数据和状态,实现准确的生产控制。
除此之外,HMI解决方案还应该提供强大的数据采集和分析
功能,帮助生产管理人员进行生产过程的监控和优化。
通过实时的数据分析,企业管理人员可以及时发现问题并采取相应的措施,提高生产效率和质量。
综上所述,HMI解决方案在工业自动化生产中扮演着重要角色。
它不仅帮助操作人员实现生产过程的监控和控制,还为生产管理人员提供了重要的数据支持,帮助他们进行生产过程的优化和决策。
因此,选择适合自身生产需求的HMI解决方案,将成为企业提升生产效率的关键之一。
步科触摸屏常见问题

目录前言错误!未定义书签。
一.软件类问题61.EV5000软件能在Vista或Win7系统下运行62.如何在线修改用户等级密码,IP地址,波特率等系统参数?63.用户权限和用户等级的区别?94.HMI的上传密码忘记了怎么办?在线修改的密码忘记了怎么办?95.离线模拟的时候为什么不能修改系统时间?96.任务栏是否可以去掉?如何弹出快选窗口?107.EV5000软件新建工程后系统自带的窗口分别有什么作用,可以删掉吗?108.如何使用操作员确认功能?129.打开工程时,提示:【系统不存在的字体文件】怎么办?1310.HMI能支持什么语言?1411.报警和事件的区别?1412.报警和事件显示元件里面的地址怎么设置?报警和事件查询怎么做?1413.事件查询为什么记录少一条?1514.如何让事件记录里面的时间和PLC里面的时间同步?1515.为什么选择了存储但是历史事件存储不了?1616.如何清除事件显示?1717.如何防止HMI里面的程序被上传?1818.如何更换HMI型号以及注意事项?1819.如何更换PLC类型,程序会丢失吗?2020.怎么更换串口?2121.如何同时打开多个工程/跨工程复制粘贴?2222.HMI的LOGO图片能更换成其他图片?2323.如何屏蔽系统报警信息PLC No Responnse?2424.如何屏蔽系统报警信息Socket Connect Error?2425.HMI提示RTC Device error的原因和处理方法2526.系统信息如何自定义?例如把PLC No Response改为:通讯无响应2527.系统滚动条的宽度如何设置?2628.如何使用软件自带的群组键盘?如何输入中/英文?2629.如何使光标在数值输入元件/文本输入元件之间随意移动?3030.是否支持反编译功能?HMI里上传的PKG文件反编译时会出现(1.3以下版本无法反编译)的对话框,要如何解决?3231.如何实现多语言切换?3232.显示负数少了一位,这是怎么回事,需要怎么设置?3533.如何对单个元件进行加密?3534.如何实现比例转换?3635.如何用PLC地址控制画面切换?3736.用PLC控制实现画面切换,为何不能再次进入设置的画面?3837.内部节点(如LB,LW,RB,RW等)的含义?3938.如何清除RW区域?4039.EV5000软件里面棒图支持浮点数吗?4040.如何查找/替换PLC地址?4141.如何快速复制多个相同的元件?4242.用直接窗口调用画面,目标画面显示不全怎么回事?4343.指示灯,按钮等元件显示不了,而离线模拟正常?4344.HMI可以在不断电的情况下重新启动吗?4345.后台元件如文本库,事件等元件的导入/导出注意事项4346.HMI用SD卡或U盘记录的后缀为CSV的文件用什么软件能打开?4447.如何触发报警声音?4448.EV5000支持哪几种格式的图片,如何导入各种图片?4649.EV5000软件里位图和向量图的区别?4750.在软件中可以修改位图和向量图吗?4851.支持视频输入的制式有哪几种?4852.当背光灯关闭以后,怎么通过PLC地址来点亮背光灯?4853.进行文本输入时,输入后的汉字都变成了乱码,这是怎么回事?4954.PLC控制里的报表输出,打印出来都是水平方式,如何实现垂直打印?5055.密码输入正确后如何直接跳转到相应的画面,不需要再按确定?5056.宏指令有几种触发方式?5057.宏指令编译时提示“warning: no newline at end of file”怎么办?5558.调用了宏指令后出现"System Cash:SegV",这是什么原因?5559.刚编辑过的工程,为什么关闭EV5000软件后还不能重命名?5660.EV5000软件能打开easybuild500做的工程吗?5661.如何使用索引寄存器来实现间接寻址?56二.通讯类问题571.PLC和HMI通讯不上怎么办?572.为什么翻页后画面上的元件不能同时显示出来,有的要几秒以后才显示出来?583.为什么HMI和下位机通讯慢?如何提高?584.怎么使图片不失真?595.HMI的USB驱动在哪里?596.PLC no response:XX-XX-X的意思?607.工程无法下载的因素有哪些?608.如何通过HMI地址来判断下位机通讯正常与否?619.U盘和SD卡的推荐型号6210.U盘和SD卡是否被HMI识别?6311.HMI支持哪些品牌的摄像头?6412.HMI需要用直连还是交叉网线?6413.HMI三个串口的通讯方式?6414.怎么进入Setup界面6415.打印功能如何设置?6516.HMI是不是只能和PLC通讯?6517.屏和PLC通讯上了,但是有些数值显示“****”怎么回事?6618.和S7-200通讯,为什么无法显示VD地址的值?6619.使用了宏指令后,HMI的切换窗口的速度变慢了,有时还会出现死机,这是为什么?6620.与S7-300通讯时使用MPI适配器与MT5020-MPI的区别?6721.MT4000/5000系列的HMI能和工控机连接吗?能作为工控机的显示器吗?6722.如何实现屏的远程下载和监控?67三.硬件类问题711.HMI上系统时间不准怎么办?712.时间不能保存,屏上显示的时间不对?713.HMI的配方寄存器里的数据断电后就没了,是怎么回事?714.为什么HMI上电烧保险丝?725.元件触控无效,怎样解决?726.HMI触摸没有反应或者触摸不灵敏,会是哪些方面的原因?727.U盘或者SD卡使用完后,可以直接从HMI上直接拔掉吗?728.HMI对U盘的格式有要求吗?739.HMI屏幕变暗,怎么处理?7310.黑屏,白屏,花屏的原因7311.HMI与其他设备通讯时,串口发热,这是怎么回事,如何解决?7412.HMI面板指示灯含义?74四.其他类问题741.打印出来是乱码,不能正常工作,请问是什么原因?742.HMI与PLC直接在线模拟时,可以读PLC内部的数据,就是不能修改,这是为什么?74B的主从接口有什么区别?754.HMI是否带操作系统?755.现场干扰会对HMI产生哪些影响,怎么排除干扰?75一.软件类问题1.EV5000软件能在Vista或Win7系统下运行兼容Vista和Win7操作系统使用Vista操作系统的时候请注意:1. 支持64位操作系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BX
DVI/USB
CX
TwinCAT PLC HMI
• PLC HMI Web
PC
TwinCAT
BK or BC
BX
JVM
TwinCAT PLC HMI Web运行于 安装有TwinCAT的PC或CE系统 的CX控制器中,PC或CX控制器 中需安装TwinCAT PLC Web软 件包并作IIS等相应配置。客户端 PC只需安装JVM(Java虚拟机) 即可通过以太网(Internet)监控 PC或CX中的界面。
• • • 可选图库控件丰富,可作出 多种多样的动态效果 功能强劲,多语言、报表、 趋势、配方…等较易实现 针对Beckhoff控制通讯需要 建立专用的Tag(除ZenOn) ,并需要做相应的配置 价格相对较贵
第三方触摸屏
• 功能介于前两者之间,鉴于 其结合硬件后的价格适中, 选择它的用户较多 开发界面的分辨率受到硬件 限制,改用不同尺寸的硬件 需要重新排列画面组件 大部分触摸屏与Beckhoff控 制器通讯只支持Modbus RTU或Modbus TCP协议, 使用Modbus RTU通讯一般 要求用户自己制作通讯线缆
• Target Visulization
运行于支持Target Visulization的EPC平台,操作系统为 WindowsCE
• TwinCAT PLC HMI Web(新)
运行于以上任一平台,要求客户端支持JVM(Java虚拟机)
TwinCAT PLC HMI
• 界面开发
a、利用集成于TwinCAT PLC Control中的Visulization编辑器就 可以开发界面; b、编辑简便快捷,无需建立专用Tag,可直接调用PLC中定义 的任何变量; c、支持多种HMI常用功能:基本元件(矩形、椭圆、多边形、 弧、位图、按钮、表格、趋势图、棒图、指针等);动态图 形(文本显示、可见/不可见、水平垂直移动、旋转、缩放 等;输入(文本输入、画面切换、语言切换、执行外部程序 等;
TwinCAT HMI
• 与PLC Control集成,使用简 单快捷,无需建立专用Tag ,可直接调用PLC中任何变 量 开发同一界面程序可运行于 不同平台,只需稍作配置即 可实现 实现多语言功能比较繁琐, 需要进行相关XML文件编辑 CE平台下有部分功能无法实 现(历史趋势、报警…等)
SCADA软件
CX
SCADA监控组态软件
• 基于TwinCAT ADS通讯
MoviCon(意大利PROGEA)、ZenOn(奥地利CopaData)、组态王(北京亚控)、力控(北京三维力控)
• 基于OPC(OLE for Process Control)通讯
所有支持OPC接口的SCADA软件(WinCC、Intouch、组 态王、 MoviCon、 ZenOn、iFix…等等)
TwinCAT PLC HMI
• Visulization
Visulization运行于安装有 TwinCAT的PC,集成在 TwinCAT PLC Contrl中,若需 独立于 TwinCAT PLC Control 全屏运行,则需在PC中再安装 TwinCAT_PLC_HMI软件包。
PC BK or BC
SCADA监控组态软件
• 基于TwinCAT ADS通讯
组态软件基于Beckhoff TwinCAT ADS通讯开发了相应的 驱动,用户在安装驱动并做简单配置后就可以实现与 Beckhoff控制器的通讯。
SCADA监控组态软件
• 基于OPC通讯
Beckhoff控制器需要安装OPC Server(CE)并做配置,组 态软件需要配置OPC Client。
第三方触摸屏
• Modbus通讯(Modbus RTU或Modbus TCP)
Proface、DELTA、Hitech、Weinview、eView…等等 所有支持标准Modbus通讯的触摸屏均可以与Beckhoff的支持 Modbus的控制器或模块通讯,通讯双方需做简单的Modbus 配置。
三者比较
HMI解决方案
Beckhoff控制器如何实现人机界面
实现人机界面的几种方式
• • • • TwinCAT PLC HMI(Visualization) SCADA(监控组态软件) 第三方触摸屏 高级语言开发
TwinCAT PLC HMI
• Visulization
运行于安装TwinCAT的PC平台,操作系统为WindowsXP或 Windows2000
BX
CX
TwinCAT PLC HMI
• Target Visulization
PC BK or BC
Target Visulization运行于CE系 统的CX控制器中,CX控制器中 需安装TwinCAT Target VisuCE 软件包,通过CX控制器的显示接 口和USB接口外接显示器和鼠标 键盘等外设实现界面的监控。
••Biblioteka •• ••
最后一种HMI解决方案
功能强大的
高级语言编程