ATGM332D双模接收机模块使用说明
ATGM332D双模接收机模块使用说明
ATGM332D双模接收机模块使用说明1.模块特性-支持GPS和北斗双模导航系统,可同时接收两种系统的导航信号。
-采用高灵敏度的接收机芯片,能够在复杂的环境下保持稳定的导航性能。
-低功耗设计,适用于电池供电的应用场景。
-支持UART串口和I2C总线两种通信接口。
-内置了高精度的时钟和计数器,可提供精确的时间和位置信息。
2.接口定义-VCC:供电电压输入,一般为3.3V。
-GND:地线。
-TXD/RXD:UART串口通信接口。
-SDA/SCL:I2C总线通信接口。
3.模块接线-将VCC接至供电电压,一般为3.3V。
-将GND接至地线。
-根据需要选择UART串口通信接口或I2C总线通信接口,并将TXD/RXD或SDA/SCL接至相应的引脚。
4.模块使用流程-上电后,等待模块初始化完成。
-配置模块的工作模式和接收频率,可以通过UART串口或I2C总线发送相应的命令。
-等待模块锁定卫星信号,获取到有效的导航数据。
-根据需要进行导航定位、路径规划等操作。
5.命令说明-ATGM332D模块支持一系列的AT指令,可通过UART串口或I2C总线发送。
-常用的命令包括:-AT+CGPS:设置GPS模式。
-AT+CBDS:设置北斗模式。
-AT+CGNSPWR:设置模块的电源状态。
-AT+CGNSINF:获取当前的导航信息。
-AT+CGPSSTATUS:获取GPS的状态信息。
6.注意事项-在使用过程中,应避免模块与其他电子设备的干扰,尽量选择空旷的地方进行测试。
-模块的天线应正确安装,确保能够接收到卫星信号。
-模块的供电电压应稳定,不得低于最低工作电压,否则可能导致模块无法正常工作。
-在进行导航定位时,应尽量选择开阔的地方,以确保能够接收到足够的卫星信号。
7.应用领域-ATGM332D双模接收机模块广泛应用于车载导航、船舶导航、航空导航、军事应用等领域。
-可用于车辆定位、路径规划、航行导航、军事作战等应用场景。
总结:ATGM332D双模接收机模块是一款高性能的双模导航接收机模块,具有高灵敏度、高精度和低功耗的特点。
基于STM32F407的智能配送小车
基于 STM32F407的智能配送小车摘要:本小车利用QMC5883L电子罗盘模块实时获取行进角度,对比初始方位角,通过微调保持小车的行进方向与配送路径航向基本一致,避免偏航。
利用SIM900A短信模块和LD3320D语音模块等无线通信技术,当物品到达目的地后,系统自动向收货人发送短信,告知物品送达。
本小车的设计打造出一种新的更加安全,可靠的配送方式,避免了交叉感染的风险,增加了配送效率。
关键词:智能小车;GPS定位;图像识别;无线通信一、引言近年来,随着现代化技术的发展,人们生活的便捷化和智能化,人们对于生活物质服务的要求也越来越高。
对于物件快递的配送,外卖的送达等服务的要求也日益剧增。
随着配送行业的不断发展,纯人工配送已经无法满足现实的需求了,并且由于新冠疫情的不断蔓延,来自隔离社区或医院的刚需市场的拉动,无人配送技术已经可以应用到医学领域,小物件配送、外卖配送等领域,实现零接触运输。
二、基于STM32F407ZET6的智能配送小车1.总体设计方案选择了STM32F407ZET6作为主控芯片,功能强大、集成度高,首先实现了一些基本的功能,小车根据上位机的控制指令通过控制直流电机、LD3320、SIM900A等模块完成前后左右运动、加减速、语音控制、短信发送,其次是电子罗盘的实现,采用 QMC588具有高分辨的磁阻传感器,使小车行驶过程中进行精度微调,再者就是GPS定位导航功能的实现,搭配相应的外围模块,实现小车位置信息的采集,并反馈给上位机,以便对其进行准确的定位和跟踪,此外,接受上位机发送的路径信息,与自身的位置坐标对比后,确定小车的行驶方向和路径,在避障系统的辅助下,控制小车行驶到预先约定的位置,最后的是摄像头OV2640的实现,主要是对路况进行颜色识别。
2.硬件设计STM32F407ZET6是本次设计的控制核心板,其次主要分为SIM900A短信测试模块、语音测试模块、4WD-L298P电机模块、HC-SR04超声波模块、QMC5883L电子罗盘、GPS_ATGM332D定位导航、OV2640图像识别等主要模块。
GM3 GPRS模块说明书

USR-GM3 GPRS模块说明书目录USR-GM3说明书 (1)1.快速入门 (3)1.1.产品测试硬件环境 (3)1.2.数据传输测试 (3)2.产品概述 (5)2.1.产品简介 (5)2.2.产品特点 (5)2.3.模块基本参数 (6)2.4尺寸描述 (7)3.产品功能 (8)3.1.用户配置流程 (8)3.2.工作模式 (9)3.1.1网络透传模式 (9)3.1.1.1模式说明 (9)3.1.2HTTPD模式 (10)3.1.2.1模式说明 (10)3.1.3短信透传模式 (10)3.1.3.1模式说明 (10)3.2注册包功能 (10)3.2.1功能描述 (10)3.3心跳包机制 (11)3.3.1功能描述 (11)3.4透传云功能 (11)3.4.1功能描述 (11)3.5串口工作方式 (11)3.5.1RS485功能 (11)3.5.2类RFC2217 (11)3.6指示灯状态指示 (12)3.7固件升级 (12)3.8低功耗模式 (12)4设置方法 (13)4.1A T指令配置 (13)4.1.1AT指令模式 (13)4.1.2串口AT指令 (14)4.1.3网络AT指令 (14)4.1.4短信AT指令 (14)4.2A T指令集 (14)5免责声明 (19)6更新历史 (19)1.快速入门USR-GM3是为实现串口与互联网通过GPRS网络相互传输数据而开发的产品,可以通过简单的AT指令进行设置从而轻松使用本产品实现串口到网络的双向数据透明传输。
本章是针对USR-GM3产品的快速入门介绍,建议用户系统的阅读本章并按照指示操作一遍,将会对模块产品有一个系统的认识,用户也可以根据需要选择你感兴趣的章节阅读。
针对特定的细节和说明,请参考后续章节。
如果在使用过程中有使用上的问题,可以提交到我们的客户支持中心:1.1. 产品测试硬件环境在测试之前我们需要使用GM3的测试底板,然后为了测试串口到网络的数据传输,我们需要使用电脑通过串口连接到GM3的测试底板上,鉴于现在有些电脑没有硬件串口,所以我们使用USB转RS232线进行连接。
光接收机模块操作及调试
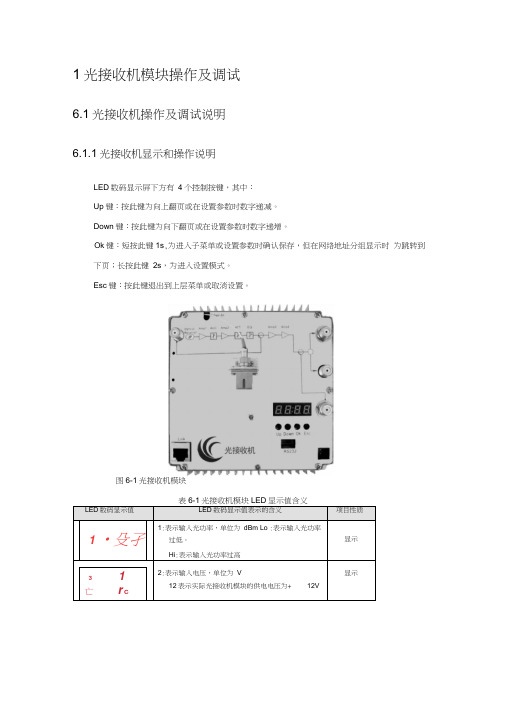
1光接收机模块操作及调试6.1光接收机操作及调试说明6.1.1光接收机显示和操作说明LED数码显示屏下方有4个控制按键,其中:Up键:按此键为向上翻页或在设置参数时数字递减。
Down键:按此键为向下翻页或在设置参数时数字递增。
Ok键:短按此键1s,为进入子菜单或设置参数时确认保存,但在网络地址分组显示时为跳转到下页;长按此键2s,为进入设置模式。
Esc键:按此键退出到上层菜单或取消设置。
图6-1光接收机模块1输入光功率(不可设置)2:输入电压(不可设置)3:机壳温度(不可设置)4:输出电平(不可设置)AGC :自动增益模式(不可设置)A1 : OUT1和0UT2端口下行衰减(可设置),长按Ok键出现数字闪烁,再按Up、Down键调节(设置范围0〜15 dB,步进为1dB,此项用来调节输出电平大小,衰减值加1dBm, 输出电平减1 dBm),短按Ok保存且退出闪烁设置状态。
E1: OUT1和OUT2端口下行均衡(可设置),长按Ok键出现数字闪烁,再按Up、Down键调节(设置范围0〜15 dB,步进为1dB,此项是对光接收机高低频输出电平进行差值补偿,均衡值加1dBm,差值减小1 dBm ),短按Ok保存且退出闪烁设置状态。
C:射频频道数(可设置),长按Ok键出现数字闪烁,再按上下键调节(设置范围1〜99, 步进为1,设置不同的值会影响输出电平的精度,此项通常使用出厂默认设置),短按Ok保存且退出闪烁设置状态。
BASE:设备基本信息,短按Ok键进入后,依次显示以下内容:P/H/G :分别是IP地址,子网掩码,网关等网络地址,其设置方法相同且如下:一个有效的网络地址格式为 A.B.C.D ,在这里是分组显示和设置的1)进入显示条目2)按设置(长按Ok键>2s),到条目内容闪动,进入设置状态3)按Down/Up设置网络地址A组内容4)按Ok (短按)切换到网络地址B显示,按Down/Up设置5)按Ok (短按)切换到网络地址C显示,按Down/Up设置6)按Ok (短按)切换到网络地址D显示,按Down/Up设置7)按Ok (短按)保存以上显示内容,回到显示条目,取消闪烁。
基于Arduino和ATGM336H模块的GPS+北斗双模定位数据传输系统设计-电子信息
毕业设计(论文)题目基于Arduino和AT GM336H模块的GPS+北斗双模定位数据传输系统设计学生毕业设计(论文)原创性声明本人以信誉声明:所呈交的毕业设计(论文)是在导师的指导下进行的设计(研究)工作及取得的成果,设计(论文)中引用他(她)人的文献、数据、图件、资料均已明确标注出,论文中的结论和结果为本人独立完成,不包含他人成果及为获得重庆工程学重庆工程学院本科生毕业设计ABSTRACT 院或其它教育机构的学位或证书而使用其材料。
与我一同工作的同志对本设计(研究)所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
毕业设计(论文)作者(签字):年月日重庆工程学院本科生毕业设计摘要摘要本设计采用Arduino系列的Atmega单片机作为控制核心,通过与ATGM336H模块和北斗模块进行串口通信,实现了GPS数据和北斗数据的双重获取,单片机在获取到相应的信息后,会将自己的数据显示到LCD上,这样用户就可以通过LCD来观看自己的定位信息。
经过实验测试,本设计在定位精准度方面可以达到10m范围内,对比其他常用的定位系统,本设计具有相同精度的同时,在成本及便携性方面均有更强的优势,同时对于科研中定位系统的研发也具有一定的指导意义。
关键字:定位系统 GPS定位北斗定位 Arduino单片机重庆工程学院本科生毕业设计ABSTRACTABSTRACTIn this design, Arduino series Atmega single chip microcomputer is used as the control core. Through serial communication with ATGM336H module and Beidou module, dual acquisition of GPS data and Beidou data is realized. After acquiring the corresponding information, the single chip microcomputer will display its own data on the LCD, so that users can watch their positioning information through the LCD. Through experimental tests, the design can reach a range of 10m in positioning accuracy. Compared with other commonly used positioning systems, the design has the same accuracy and has stronger advantages in cost and portability. At the same time, it has certain guiding significance for the research and development of positioning systems in scientific research.Keywords: positioning system; GPS positioning; Beidou positioning; Arduino ; microcontroller重庆工程学院本科生毕业设计目录目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 研究背景与意义 (1)1.2 国内外发展现状 (2)1.3 本文的研究内容及章节安排 (3)2 系统方案设计 (5)2.1 系统可行性分析 (5)2.2 系统问题分析 (6)2.3 系统框架设计 (6)2.4 元器件选型 (7)3 系统硬件电路设计 (8)3.1 供电电路设计 (8)3.2 微处理的选型 (8)3.3 外部时钟设计 (10)3.4 定位模块的选择与设计 (10)3.5显示模块的设计 (11)3.6 Arduino产品简介 (11)4 系统软件设计 (16)4.1 NEMA协议分析 (16)4.2 定位模块串口通信部分软件设计 (17)4.3 显示部分软件设计 (19)5 系统测试 (23)5.1 硬件调试 (23)5.2 硬件仿真 (23)5.3 硬件电路测试 (25)6 总结 (27)参考文献 (28)致谢 (29)附录 (30)重庆工程学院本科生毕业设计目录附录1 电路原理图 (30)附录2 源程序 (31)重庆工程学院本科生毕业设计 1 绪论1 绪论1.1 研究背景与意义随着社会进入了二十一世纪,我们已经进入了一个新的时代-自动化时代。
小型化双高频头接收机模块使用说明
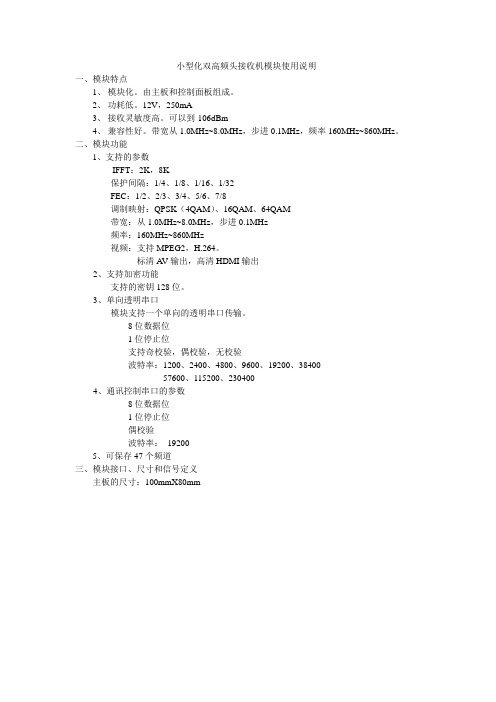
小型化双高频头接收机模块使用说明一、模块特点1、模块化。
由主板和控制面板组成。
2、功耗低。
12V,250mA3、接收灵敏度高。
可以到-106dBm4、兼容性好。
带宽从1.0MHz~8.0MHz,步进0.1MHz,频率160MHz~860MHz。
二、模块功能1、支持的参数IFFT:2K,8K保护间隔:1/4、1/8、1/16、1/32FEC:1/2、2/3、3/4、5/6、7/8调制映射:QPSK(4QAM)、16QAM、64QAM带宽:从1.0MHz~8.0MHz,步进0.1MHz频率:160MHz~860MHz视频:支持MPEG2,H.264。
标清A V输出,高清HDMI输出2、支持加密功能支持的密钥128位。
3、单向透明串口模块支持一个单向的透明串口传输。
8位数据位1位停止位支持奇校验,偶校验,无校验波特率:1200、2400、4800、9600、19200、3840057600、115200、2304004、通讯控制串口的参数8位数据位1位停止位偶校验波特率:192005、可保存47个频道三、模块接口、尺寸和信号定义主板的尺寸:100mmX80mmA、接收板及其接口B、接收板接口及信号说明四、模块之间连接1、按键板的控制串口的发送端与主板串口的接收端连接按键板的控制串口的接收端与主板串口的发送端连接按键板的控制串口的地与主板串口的地连接2、按键板的LCD接口与LCD板的LCD接口用扁线连接,1脚与1脚对应3、主板和按键板都要接上12V电源,LCD板不用再接电源五、按键、菜单操作菜单1上电开机进入菜单1,3个LED灯全亮,按键不起作用。
和主板子通讯上后进入菜单2菜单2加载最近一个频道,如果是开机,就是上次关机前使用的频道, 这些显示的信息1秒钟刷新一次,LED根据信号质量来决定几个灯亮,质量越好,亮的灯就越多。
第一排代表的意义:01:频道号,340.0M:代表频率,单位为M2.0M:频道带宽*:当前正在录像,#没有录像L:代表频率锁定,如果频率没有锁定就是U第二排代表意义:26.6dB:信噪比,单位为dB-99.9dBm:高频头的输入功率,单位为dBmExit健:录像功能。
便于智能化管理的公共垃圾桶的设计与实现
2022年 / 第1期 物联网技术670 引 言垃圾的处理问题已经成为全球性问题[1]。
随着人工智能技术的成熟以及人们生活水平的提高,人们也愈发追求智能化的生活。
智能家居、智慧城市发展迅速,而垃圾桶作为生活中不可缺少的工具之一,并未随着智慧城市的发展而得到快速改进,很多公众场所仍然使用着传统的大型垃圾桶。
传统垃圾桶露天放置,装满后若不及时清理,容易散发异味和滋生细菌,甚至污染环境[2-4]。
目前,市面上出现的智能垃圾桶,如自动翻盖垃圾桶[5]、踢碰感应垃圾桶、自动报满垃圾桶[6-7],它们功能单一、价格昂贵,而且适用范围小,大多只满足于家用。
针对以上问题,本文设计了一款基于智能化管理的公用垃圾桶。
该智能垃圾桶以Arduino 作为主控,结合一系列传感器感知垃圾桶的状态信息,通过ESP8266模块将状态信息及时上传到服务器,环保部门可以通过微信小程序实时查看垃圾桶的信息,若垃圾桶装满而产生溢出或桶内温度过高、桶内起火等情况则自动报警。
1 系统构成本设计主要具有定位、自动开盖、语音提示、判断垃圾桶是否装满等功能。
单片机通过ESP8266模块将垃圾桶的编号、状态等信息与服务器进行数据交互,微信小程序获取服务器的数据后在用户端显示状态信息。
用户或环卫部门可以通过访问微信小程序得知垃圾桶状态,并且可以统筹规划特定区域内垃圾桶的摆放。
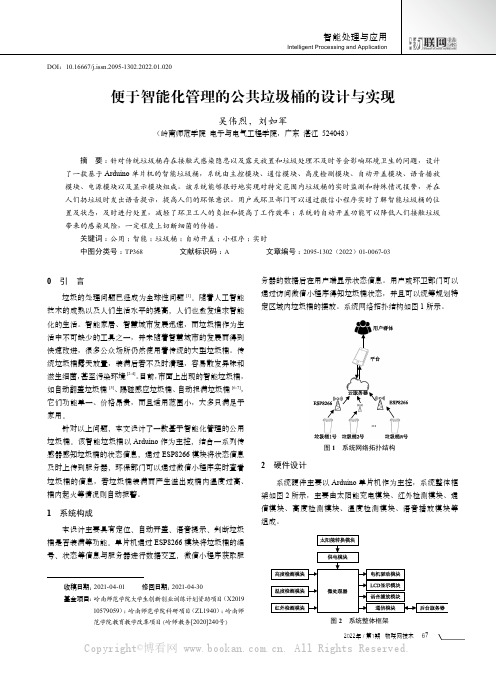
系统网络拓扑结构如图1所示。
图1 系统网络拓扑结构2 硬件设计系统硬件主要以Arduino 单片机作为主控,系统整体框架如图2所示,主要由太阳能充电模块、红外检测模块、通信模块、高度检测模块、温度检测模块、语音播放模块等 组成。
图2 系统整体框架吴伟烈,刘如军(岭南师范学院 电子与电气工程学院,广东 湛江 524048)摘 要:针对传统垃圾桶存在接触式感染隐患以及露天放置和垃圾处理不及时等会影响环境卫生的问题,设计了一款基于Arduino 单片机的智能垃圾桶,系统由主控模块、通信模块、高度检测模块、自动开盖模块、语音播放模块、电源模块以及显示模块组成。
基于STM32的智能火灾监测及灭火系统设计

河南科技Henan Science and Technology 信息技术总778期第八期2022年4月基于STM32的智能火灾监测及灭火系统设计徐崇奇解建国毕佳琦潘广禄(山东农业大学,山东泰安271018)摘要:近年来火灾频发,尤其是森林、丘陵等地区成为火灾的高发地区,其不仅会造成大量的财产损失,还会对人群造成严重的伤害,甚至引发一系列生态问题,破坏大自然生态平衡。
传统的火情监控方式耗时耗力,且一般不能及时处理险情,极易造成不可挽回的损失。
基于此,本研究设计并制作了以STM32为核心板的智能火灾监测及灭火小车系统。
其采用履带式底盘,可在丘陵等地形复杂的环境中前行,在合理有效避障的过程中检测火源并进行初步灭火,利用透射模块将北斗定位发送至阿里云平台,实现火情信息的实时监测传输,经试验测试,该系统稳定高效,对当今火灾防护研究与探索具有一定的现实价值和意义。
关键词:火源搜索;自动避障;履带底盘;超声波避障;无线通信中图分类号:TP368.1;TP23文献标志码:A文章编号:1003-5168(2022)8-0029-05 DOI:10.19968/ki.hnkj.1003-5168.2022.08.006Design of STM32Based Intelligent Fire Monitoring and Fire Suppres⁃sion SystemXU Chongqi XIE Jianguo BI Jiaqi PAN Guanglu(Shandong Agricultural University,Tai′an271018,China)Abstract:In recent years,fires are frequent,especially in forest,hilly areas and other areas have become fire-prone areas,which not only cause a lot of property damage,but also bring serious injuries to people and even cause a series of ecological problems to destroy the ecological balance of nature.Based on the background that traditional fire monitoring methods are time-consuming and labor-intensive and gener⁃ally fail to deal with dangerous situations in a timely manner,which can easily cause a series of irrepa⁃rable losses,we designed and fabricated an intelligent fire monitoring and fire extinguishing cart system with STM32as the core board.The cart adopts a crawler chassis,which can be applied to travel in hilly and other terrain with complex environment.It can detect the fire source in the process of reasonable and effective obstacle avoidance,carry out preliminary fire extinguishing and use the transmission module to send the Beidou positioning to Ali cloud platform to realize the real-time monitoring and transmission of fire information.Keywords:fire search;automatic obstacle avoidance;crawler chassis;ultrasonic obstacle avoidance;wire⁃less communication0引言目前,我国的火灾形势总体比较严峻。
基于物联网技术的盲人出行辅助装置设计
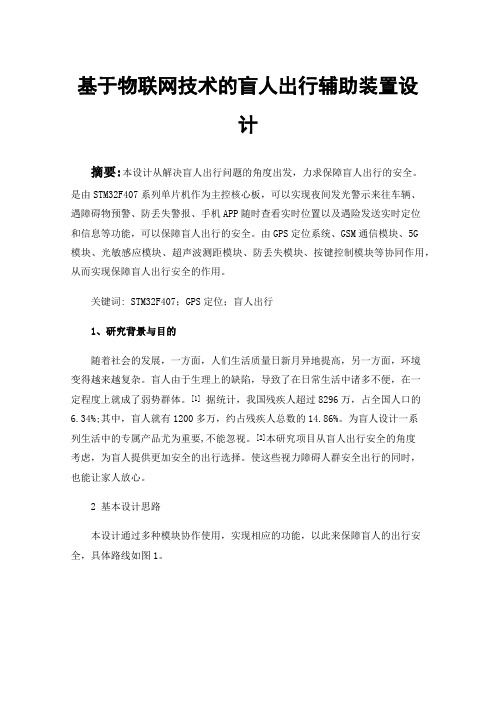
基于物联网技术的盲人出行辅助装置设计摘要:本设计从解决盲人出行问题的角度出发,力求保障盲人出行的安全。
是由STM32F407系列单片机作为主控核心板,可以实现夜间发光警示来往车辆、遇障碍物预警、防丢失警报、手机APP随时查看实时位置以及遇险发送实时定位和信息等功能,可以保障盲人出行的安全。
由GPS定位系统、GSM通信模块、5G模块、光敏感应模块、超声波测距模块、防丢失模块、按键控制模块等协同作用,从而实现保障盲人出行安全的作用。
关键词: STM32F407;GPS定位;盲人出行1、研究背景与目的随着社会的发展,一方面,人们生活质量日新月异地提高,另一方面,环境变得越来越复杂。
盲人由于生理上的缺陷,导致了在日常生活中诸多不便,在一定程度上就成了弱势群体。
[1]据统计,我国残疾人超过8296万,占全国人口的6.34%;其中,盲人就有1200多万,约占残疾人总数的14.86%。
为盲人设计一系列生活中的专属产品尤为重要,不能忽视。
[2]本研究项目从盲人出行安全的角度考虑,为盲人提供更加安全的出行选择。
使这些视力障碍人群安全出行的同时,也能让家人放心。
2 基本设计思路本设计通过多种模块协作使用,实现相应的功能,以此来保障盲人的出行安全,具体路线如图1。
图1:总体设计框图3.硬件选择(1)STM32F407ZGT6芯片选用ST(意法半导体)推出的STM32F407系列芯片。
它是ST(意法半导体)推出了以基于ARM Cortex™-M4为内核的高性能微控制器,其采用了90 纳米的NVM 工艺和ART(自适应实时存储器加速器,Adaptive Real-Time MemoryAccelerator™)。
选用此芯片可以大大提高本项目的效率,使定位、测距等功能更加精确。
(2)HC-SR04超声波模块HC-SR04超声波测距Q模块可提供2cm-400cm 的非接触式距离感测功能,测距精度可达高到的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
ATGM332D双模接收机模块使用说明
GPS only、BDS only、GPS&BDS <1s (开阔地)
重捕获首次定位时间
定位更新率
1Hz(默认) 最高 10Hz
GPS only、BDS only、GPS&BDS 20ns
的授时精度
杭州中科微电子有限公司
9
BDS/GPS 双模接收机模块
ATGM332D
串口特性
波特率范围:4800 bps ~115200 bps,默认 9600bps,
频段
L1,1575.42MHz;B1,1561.098MHz
通道数目
32 通道
GPS only、BDS only、GPS&BDS -148dBm 冷启动捕获灵敏度
GPS only、BDS only、GPS&BDS -160dBm
跟踪灵敏度
GPS&BDS 定位精度
2.5m(CEP50%,开阔地)
GPS only
注:客户可选择模块是否内置天线检测功能。
杭州中科微电子有限公司
12
BDS/GPS 双模接收机模块
ATGM332D
3 用户接口
ATGM332D 通过 UART 接口输出 NMEA 协议格式的定位数据,UART 接口的波
特率默认为 9600bps,起始位 1 位,数据位 8 位,停止位 1 位,无校验位。
2.3 PIN 排列图
杭州中科微电子有限公司
5
BDS/GPS 双模接收机模块
ATGM332D
2.4 管脚定义
引脚 编号
名称
I/O
描述
电气特性
1
保留
悬空
2
保留
悬空
3
TIMEPULSE O 秒脉冲输出
GPS+北斗BD双模接收机模块ATGM330B
BD2/GPS双模接收机模块ATGM330B规格书版本更新历史版本日期更新内容1.0 2012/11/20 初稿1功能描述1.1概述ATGM330B是高灵敏度BD2/GPS双模接收机模块,支持GPS和BD2的单系统定位和双系统联合定位。
其中的射频前端芯片和基带芯片全部为本公司独立研发,拥有自主知识产权。
ATGM330B包含32个跟踪通道,可以同时接收所有的GPS和BD2可见卫星。
ATGM330B可以直接替换REB-3571LP,ZYM-GA71等多款GPS模块,主要接口信号Pin-Pin兼容,安装孔一致。
1.2关键特性z高灵敏度:-160dBmz支持BD2、GPS的单系统定位和双系统联合定位z低功耗:小于280mW(双模连续跟踪并且定位)1.3应用z车载导航z个人手持导航z授时2技术描述2.1外观尺寸(单位:mm )2.2 PCB layout2.3管脚定义引脚编号名称I/O 描述电气特性1 VCC 系统电源直流 3.3V±5%2 GND 系统地3 nBOOT I 程序升级使用。
如不用,可悬空。
TTL电平;Vih≥0.7*Vcc;Vil≤0.3*Vcc4 RXD1 I 串行数据输入或用户自定TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA5 TXD1 O 导航数据输出或用户自定义TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA6 TXD2 O 串口输出或用户自定义TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA7 RXD2 I 串行数据输入或用户自定TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA8 nPWRDN I 系统电源控制如不用,可悬空。
POWER ON=1 系统默认;POWER OFF=09 GPIO1 I/O10 GND 系统地11 RF-GND PWR 模拟地12 RF-GND PWR 模拟地13 RF-GND PWR 模拟地14 RF-GND PWR 模拟地15 RF-GND PWR 模拟地16 RF-GND PWR 模拟地17 RF-IN I 天线信号输入18 RF-GND PWR 模拟地19 ANT_PWR PWR 天线电源以天线要求决定20 VCC_RF PWR 输出电源+3.3V,可给天线供电21 VCC_BACKUP PWR RTC及SRAM后备电源提供+3.0~+4.2V电源以保证GPS热启动22 nRESET I 系统复位如不用,可悬空。
汽车乘客下车防撞警示装置的设计
工业技术科技创新导报 Science and Technology Innovation Herald82DOI:10.16660/ki.1674-098X.2019.06.082汽车乘客下车防撞警示装置的设计①邓晶晶 胡治伟 夏诗雨 范悉荣 李卫 许佳帅(湖南第一师范学院教育科学系 湖南长沙 410205)摘 要:一种汽车乘客下车防撞警示装置基于北斗+GPS双模定位模块,通过对Arduino开发板的研究,智能控制舵机和语音单元,给出了针对乘客下车安全问题的解决方案。
采用的北斗+GPS双模定位模块能够迅速而准确的采集车辆的定位数据,并且实时传输给Arduino主控板从而计算出车速,并给出相应控制指令。
这使得汽车乘客下车防撞警示装置在产品功能上具有实时、准确的特点。
关键词:警示系统 下车安全 Arduino开发板 定位模块中图分类号:U463.6;TP368.1 文献标识码:A 文章编号:1674-098X(2019)02(c)-0082-03Abstract: anti-collision device for passengers alighting is based on Beidou+GPS dual-mode positioning module. Combination of Arduino development board, intelligent control of steering gear and voice unit, a solution for passengers alighting safety is given. The Beidou+GPS dual-mode positioning module, which we used is able to accurately collect vehicle positioning data, and transmit it to the Arduino main control board in real time. As a result, to calculate the vehicle speed, and to give the corresponding control instructions.Key Words: Warning system; Getting off safety; Arduino development board; Positioning module①基金项目:湖南省大学生研究性学习和创新性实验计划,汽车乘客下车安全警示系统(项目编号:2017864)。
中科微 ATGM332D-5N 用户手册说明书
BDS/GNSS全星座定位导航模块ATGM332D-5N用户手册杭州中科微电子有限公司杭州市滨江区江南大道3850号创新大厦10楼电话:*************传真:*************网站:版本更新历史版本日期更新内容1.0 2015/7/01 初稿1.1 2015/12/1 增加产品选购说明;增加订单型号说明;增加同系列单GPS模块,单BDS模块的功能说明;增加Flash、在线升级协议等特性说明修订有源天线应用电路图;增加无源天线应用电路图;修改联系电话为技术支持电话;其他文本完善;1.2 2016/7/15 文本完善1.3 2018/1/15 文本完善1.4 2018/2/08 删除授时指标1.5 2018/9/21 修订有源天线应用说明1.6 2018/11/20 文本完善1 功能描述1.1 概述ATGM332D-5N 系列模块是12X16尺寸的高性能BDS/GNSS 全星座定位导航模块系列的总称。
该系列模块产品都是基于中科微第四代低功耗GNSS SOC 单芯片—AT6558,支持多种卫星导航系统,包括中国的BDS (北斗卫星导航系统),美国的GPS ,俄罗斯的GLONASS ,欧盟的GALILEO ,日本的QZSS 以及卫星增强系统SBAS (WAAS ,EGNOS ,GAGAN ,MSAS )。
AT6558是一款真正意义的六合一多模卫星导航定位芯片,包含32个跟踪通道,可以同时接收六个卫星导航系统的GNSS 信号,并且实现联合定位、导航与授时。
ATGM332D-5N 系列模块具有高灵敏度、低功耗、低成本等优势,适用于车载导航、手持定位、可穿戴设备,可以直接替换Ublox NEO 系列模块。
1.2 产品选购型号多模功能电源接口特性G P SB D SG L O N A S S2.7V ~3.6V1.65V ~3.6VU A R T 1U A R T 2F l a s hT C X O天线检测天线过流保护前置S A W 外置L N AATGM332D-5N-11●●●●●●●●● ●ATGM332D-5N-21●●●●●●●●● ●ATGM332D-5N-31●●●●●●●●●● ●ATGM332D-5N-51●●●●●●●●●● ●ATGM332D-5N-71●●●●●●●●●●●●1.3 性能指标⚫出色的定位导航功能,支持BDS/GPS/GLONASS卫星导航系统的单系统定位,以及任意组合的多系统联合定位,并支持QZSS和SBAS系统⚫支持A-GNSS⚫冷启动捕获灵敏度:-148dBm⚫跟踪灵敏度:-162dBm⚫定位精度:2.5米(CEP50)⚫首次定位时间:32秒⚫低功耗:连续运行<25mA(@3.3V)⚫内置天线检测及天线短路保护功能注1:以上性能指标适用于ATGM332D-5N-11、ATGM332D-5N-31、ATGM332D-5N-51、ATGM332D-5N-71模块。
基于YOLOv8算法智能无人救生艇
基于YOLOv8算法智能无人救生艇摘要:溺水事故在中国是一个严重的问题,每年都造成大量的死亡和伤亡,大部分溺水事故发生在水库、池塘、河流、溪边和湖泊等地。
为了减少溺水死亡人数和人力成本,本文提出了一种智能化的无人救生艇,旨在改善传统救生圈存在的问题。
该救生艇可以自动监测水域情况,并提供自动救援,有效提高救生效率和减少人为风险。
本研究的结果将有助于改善溺水事故的预防和救援技术,保护人们的生命安全。
1.引言:溺水是全球每年造成数万人死亡的重大公共安全问题。
然而,在面对复杂的救援场景时,如何高效地进行溺水救援成为了一个艰巨的任务。
传统类型的救生圈存在一些常见问题,无法满足实际需求。
针对这一问题,本论文提出了一种基于YOLOv8算法的智能无人救生艇,旨在解决当前市场上救生装备的局限性。
该智能无人救生艇具备远程遥控、夜视功能、实时影像传输、人体红外感应和太阳能供电等功能。
它能够快速、准确地自动识别溺水者的位置,并实现无人化的救援操作。
通过采用YOLOv8算法,该系统可实现对落水者的监测和定位,提供精准而迅速的救援响应。
这将为溺水者提供有效救援并降低救援行动所面临的风险。
本论文旨在探讨和设计一种先进的救援装备,以解决溺水救援中的困难和挑战。
该研究的成果将为溺水事故的预防和救援工作提供有力支持,并为改善公共安全做出重要贡献。
2.基于YOLOv8算法智能无人救生艇系统构建2.1机械设计(1)结构外形设计智能无人救生艇设计结合了救生圈及游泳学习用的浮板相结合,其头部模仿了现代快艇设计理念,前部的三角光滑曲面设计有利于智能救生艇快速移动救援,根据流体力学效应,这种形状可以减小水的阻力面积,有效提高移动速度,做成曲面,有效增加与水接触面积,起到增加浮力作用。
尾部结合了圆形救生圈,圆形的尾部在水面上所占据的表面积比其他形状在水面上所占据的表面积大,从而让智能救生艇获得到更大的浮力。
结构外形设计如图1图2所示:图1产品渲染图图2产品设计手稿(2)动力系统设计新型动力系统结构是结合了倍增空气机结构和倍增中空出风结构设计的一套水下动力系统,中空的动力结构设计相对于传统的船舶的动力系统在安全、维修、干扰等方面都有一个很好的优化。
ATGM331C双模接收机模块使用说明_V1.3
60
备份电源
Vbat
2.0
3.0
备份电源(Vbat)电流
Ibat
20
输入引脚
Vil
Vih
0.7*Vcc
输出引脚
Vol
Io=-12mA
Voh
Vcc-0.5
Io=12mA
天线短路保护电流
Iant
50
电源来自ANT_PWR(=3.3V) short
天线开路电流
Iant
1
电源来自ANT_PWR(=3.3V) open
提供+3.0~+4.2V 电源以保
证 GPS 热启动
I地 I地 I地 I 天线信号输入 I地 O 输出电源 I 天线电源
+3.3V,可给天线供电 与外接有源天线电源一致, 对于 3.3V 的有源天线可以 直接连接到 18 脚。
悬空 悬空 悬空 悬空 悬空 悬空
杭州中科微电子有限公司
7
BD2/GPS 双模接收机模块
2
BD2/GPS 双模接收机模块
ATGMபைடு நூலகம்31C
1 功能描述
1.1 概述
ATGM331C 是高灵敏度 BD2/GPS 双模接收机模块,支持 GPS 和 BD2 的单系 统定位和双系统联合定位。其中的射频前端芯片和基带芯片全部为本公司独立研 发,拥有自主知识产权。ATGM331C 包含 32 个跟踪通道,可以同时接收所有的 GPS 和 BD2 可见卫星。ATGM331C 可以直接替换 U-blox LEA-6T/6R 等多款 GPS 模块,主要接口信号 Pin-Pin 兼容,安装孔一致。
20
21
22
23
24
25
26
27
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ATGM332D双模接收机模块使用说明
ATGM332D双模接收机模块是一种集成了GPS和GLONASS双模接收功能的模块。
它采用了高性能的UBLOX芯片,具有高灵敏度和高准确度的定位能力。
本文将为您详细介绍ATGM332D双模接收机模块的使用说明。
一、模块特点
1.双模接收功能:支持GPS和GLONASS双模接收,具有更广泛的卫星覆盖范围和更快的定位速度。
2.高性能芯片:采用UBLOX芯片,具有卓越的定位性能和稳定性。
3.高灵敏度:支持-167dBm的超高灵敏度,能够在弱信号环境下进行定位。
4.低功耗设计:采用低功耗设计,适用于电池供电的应用场景。
5.小尺寸:模块体积小巧,方便嵌入各种设备中。
二、模块参数
1.接收频率:GPSL1频段和GLONASSL1频段
2.接收灵敏度:-167dBm
3.定位精度:水平位置精度<2.5m,速度精度<0.1m/s
4.支持卫星系统:GPS、GLONASS
5.工作温度范围:-40℃~+85℃
6.工作电压:3.0V~3.6V
三、模块接口
1.VCC:工作电压输入口,接3.3V电源。
2.GND:地线,接地。
3.TXD:串口发送数据线,连接到主控设备的接收端口。
4.RXD:串口接收数据线,连接到主控设备的发送端口。
5.PPS:脉冲秒信号输出,可以用来同步其他设备。
四、模块使用
1.接口连接:将模块的VCC接到3.3V电源,GND接到地线,TXD和RXD分别连接到主控设备的发送和接收端口。
2.命令控制:通过主控设备向模块发送命令,控制模块的功能和参数设置。
可以使用串口连接主控设备,并发送AT指令进行控制。
例如,通过发送AT+GPS=1来开启GPS功能。
3.数据接收:主控设备通过串口接收从模块发送过来的数据,解析数据可以获取定位信息和其他相关信息。
4.其他功能:模块还具有其他功能,如AGPS辅助定位、绝对位置保持等。
可以根据需要进行相应的设置和使用。
五、注意事项
1.模块在使用时需要注意防静电,避免模块损坏。
2.模块应安装在能够接收到GPS/GLONASS信号的区域,尽量避免阻挡物。
3.在使用模块时应保证模块的供电稳定,并避免电压波动。
4.在进行串口通信时,应配置正确的波特率和数据格式,以确保数据的正确传输和解析。
六、应用领域
1.智能交通:用于车载导航、交通监控等系统。
2.物联网:用于物联网设备的定位和追踪功能。
3.定位服务:用于提供定位服务和应用。
4.军事领域:用于军事定位和导航系统。
总结:
ATGM332D双模接收机模块是一款性能优越的GPS/GLONASS双模接收模块,具有高灵敏度、低功耗、小尺寸等特点。
本文通过介绍其特点、参数、接口和使用说明,希望能够帮助用户更好地了解和使用该模块。