2014年西北工业大学考研821自动控制原理试题
西北工业大学考试试题(A卷)-----答案 (20140624)
八、(本题10分)电路如图所示,设运放为理想运放,三极管的 。 (1) 求出三极管的C、B、E各极的电位值; (2) 若电压表的读数为200mV,试求三极管的电流放大系数
的值。
【解】(1)利用虚短、虚断的概念得:
(2)三极管的β值:
故电流放大系数为
九、(5分)电路如图4所示,试合理连线,引入合适组态的反馈满足要求:减小放大电路从信 号源索取的电流,并增强带负载能力。
等于各级电压放大倍数之积; B)
等于输入级的输入电阻; C)
等于输出级的输出电阻; D)
等于各级电压放大倍数之和。 (6)用恒流源电路代替差动放大电路中的射极电阻
,可以提高电路的( D ) A)|
|; B)|
|; C)
; D) 。 (7)下图所示电路中,晶体管能够取得合适的静态工作点的电路为( B
)。
又有 故
六、(本题8分) 图6所示电路中,三端稳压器LM78L15的1、3端电压 U13≥4V才能正常工作,最大输出电流为0.1A;输入电压UI=35V,A 为理想运放。试回答:1.若R1=R2=1kΩ,则UO为多少?2.若R2为 负载电阻,求其电流的表达式?R1的最小值为多少?若R1=300Ω, 则R2的最大值为多少?
1.UO=30V;(2分) 2.;(2分) ;(2分) R1=300Ω时,,(2分) 七、(本题15分)(作业4-6 ) 电路见图P4-6(a)。已知和管的,,, kΩ,,, 。 (1) 若,求; (2) 若,试画出波形图; (3) 若,试求允许的最大变化范围;
解: (1)
(2) 其波形如图P4-6(b)所示。
;C)2β; D)1+β (11)功率放大电路的最大输出功率是 ( A )。
西北工业大学《827信号与系统》历年考研真题汇编
目 录2014年西北工业大学827信号与系统考研真题(回忆版)2011年西北工业大学432信号与系统(A)考研真题2010年西北工业大学827信号与系统(A)考研真题2009年西北工业大学信号与系统(B)考研真题2008年西北工业大学827信号与系统(A)考研真题2007年西北工业大学432信号与系统(A)考研真题2006年西北工业大学432信号与系统(A)考研真题2005年西北工业大学信号与系统考研真题2004年西北工业大学432信号与系统考研真题2003年西北工业大学432信号与系统考研真题2002年西北工业大学536信号与系统考研真题版)西北工业大学201!年攻波硕士学位删究生入学专试试题试题名称:信号与系统(A )说 明:明节答迎•律七在答题维上科目代码:432 第I 页共』页—、口o 分)系统如图1-1欧不,请何该系统是若为:即KI 的? <4分)以}因果的?(4分〉线性的? C4^J E )时求先的,《4分) 壬)稳定的? 3分〉;并蚀分别说叫厕的-二、f 15分)某螃性时不变系统当轿人叫,)肘,扎亨状态痢应为:fP [|.,(心话别如园3-2.圈3-3和国3足所:芥.⑴ 用图解法求Y (»; <12分,f2)吗招丫口心的散学表达式.I分)COSift^r七』-广5}宙+门-]1-<“"奸丁),成中T 为常数L 试利用脂积的性质求彼系玩的冲噩响应h ⑴、"20分旧物系统如图3-1所示,系统输入』。
的敏业叶变换F (j*》以及11J 问>y(t)~X(t)COSr» £I 顷九}乘法器西北工业大学2011年攻读硕士学位研究生入学君试试题试题名称「信号与系统(A)科目代码:432说呱所有答题一供吗在答题纸上弟2页兵4弟图3-3叫、HQ分)图4-【区示系统.r.U)=12V,LTH,O1F.R,=3Q.R^2Q b R.1Q.坤升美s断升时.搦电捋已经处干起余*1o时.升美sfflrr:求s件]mm<i)总两端电压的客状态响曲.%(“m林(2)R,两端电翼的零输入响应.5>16分此西北工业大学20]I年攻读硕士学在研究生入学考试试题试题名称:信导与系统(A)科目代码:432说明:所有答魅•律”在答逅纸上第3页共,1页图4-]五」20分)在连瓣时间系统中.RG电路可以构成将通滤波嚣:在抽样素统中.可以利用也容的充放电特性来构成吓关电容滤波器■图5-1-个开美屯容就波簪的原理小摄图,屯容CI和C2两靖的起始电压为零,如果在nT时茉,开美黝接通,英咻而百订十9虬开关$1断开,维接通<n^0)t电容Cl和C2的充放电时间近小于「(1)对于激励*和响晌写出侔IS-1所示系统的爸分方程:门3图5-1西北工业大学20】I年攻读硕士学位研究生入学考试拭题试题名称,信号与系统(对科目代码:432说明:所亏答.腿神写在答题纸上第』讯其4训F若粉入代耳浏卜叫),求系统的零状态响应孔曲丁)槌分L六、<20分〕已知:.y J jj)-6)].-u(ji+6}"W(Jt+l)-求;J1J s(n)=i<14)⑵而出序列瓦皿(65»七、"。
《自动控制原理》西北工业大学参考题整理
《自动控制原理》西北工业大学参考题整理西北工业大学《自动控制原理》参考习题1-3、1-4;2-1(c)&(d)、2-6、2-8、2-10、2-11、2-12、2-133-1、3-3、3-4、3-6、3-7、3-9、3-11、3-13、3-15、3-16、3-17、3-21、3-22、3-23、3-24、3-28(1)、3-38、3-394-2、4-3(1)&(3)5-1、5-2(1)、5-3、5-6、5-9(1)&(2)&(3)、5-11(1)、5-13(1)~(4)6-2、6-3、6-4、6-5(1)、6-6、6-7、6-8、6-10(1)、6-12、6-13、6-16第一章习题及答案1-3、1-41-3 题1-3图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
题1-3图 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
西工大821自动控制原理-4习题及答案-第四章 根轨迹法习题及答案

1 西工大821自动控制原理第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4)(2)(1()()(*+++=s s s K s H s G试证明点311j s +-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图解4-1所示。
对于31j s +-=,由相角条件=∠)()(11s H s G=++-∠-++-∠-++-∠-)431()231()131(0j j jππππ-=---632满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:1431231131)(*11=++-⋅++-⋅++-=j j j K s H s G )(解出 : 12*=K , 238*==K K 4-2 已知开环零、极点如图4-22所示,试绘制相应的根轨迹。
(a) (b) (c) (d)(e) (f) (g) (h)题4-22图 开环零、极点分布图2解 根轨如图解4-2所示:4-3 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。
⑴ )15.0)(12.0()(++=s s s Ks G⑵ )3)(2()5()(*+++=s s s s K s G⑶ )12()1()(++=s s s K s G解 ⑴ )2)(5(10)15.0)(12.0()(++=++=s s s Ks s s K s G系统有三个开环极点:01=p ,22-=p ,53-=p ① 实轴上的根轨迹:(]5,-∞-, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=--=πππϕσ,33)12(373520k a a图解4-2 根轨迹图3③ 分离点:021511=++++d d d 解之得:88.01-=d ,7863.32-d (舍去)。
④ 与虚轴的交点:特征方程为 010107)(23=+++=k s s s s D令 ⎩⎨⎧=+-==+-=010)](Im[0107)](Re[32ωωωωωj D k j D 解得⎩⎨⎧==710k ω与虚轴的交点(0,j 10±)。
西北工业大学821自动控制原理重难点解析课程讲义

G G G G G G G G G G G G G G G G G G G G H 1 2 3 4+ 1 2 4+ 2 3 4 5+ 2 4 5- 3 4 6- 2 4 6 2 s )= Φ( 1- G H + G G G G H + G G G H 2 2 1 2 3 4 1 1 2 4 1 【 例6 】 已知系统结构图, 求 C ( s ) = ? ) R ( S
西北工业大学 8 2 1自动控制原理重难点解析篇
第 1讲 控制系统的数学模型
拉普拉斯变换有关内容 拉氏变换的几个重要定理 ( 1 ) 线性性质 L [ a f ( t )± b f ( t ) ]= a F ( s )± b F ( s ) 1 2 1 2 ( 2 ) 微分定理 L [ f ′ ( t ) ]= s ·F ( s )- f ( 0 )
2 t / 2 - a t e
1 1 / s
2 1 / s 3 1 / s
1 / ( s + a )
2 2 / ( s + ω ω) 2 2 s / ( s + ω)
s i n t ω c o s t ω
线性定常微分方程求解 【 例1 】 R- C电路计算 u R i + u r= c
· i = c u u ( t )= E ·1 ( t ) c r 0
考试点( w w w . k a o s h i d i a n . c o m ) 名师精品课程 电话: 4 0 0 6 8 8 5 3 6 5
其中初条件引起的自由响应部分 C C - 41 1 1 - ( s + 5 ) 1 2 C = + = + ( s )= 0 ) s + 1 s + 4 3s + 1 3s + 4 ( s + 1 ) ( s + 4
C i m 1 =l
西北工业大学自动控制原理模拟题与答案胡祝兵
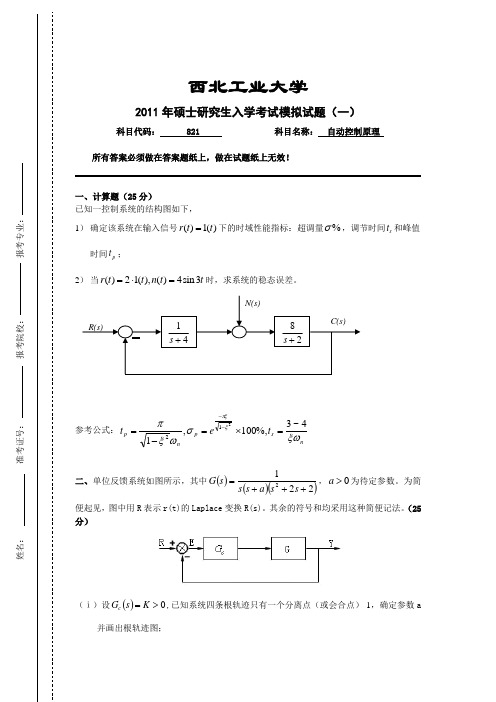
西北工业大学2011年硕士研究生入学考试模拟试题(一)科目代码: 821 科目名称: 自动控制原理所有答案必须做在答案题纸上,做在试题纸上无效!一、计算题(25分)已知一控制系统的结构图如下,1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调节时间s t 和峰值时间p t ;2) 当()21(),()4sin3r t t n t t =⋅=时,求系统的稳态误差。
参考公式:ns p np t et ξωσωξπξπξ4~3%,100,1212=⨯=-=--二、单位反馈系统如图所示,其中()()()2212+++=s s a s s s G ,0>a 为待定参数。
为简便起见,图中用R 表示r(t)的Laplace 变换R(s)。
其余的符号和均采用这种简便记法。
(25分)(ⅰ)设()0>=K s G c ,已知系统四条根轨迹只有一个分离点(或会合点)-1,确定参数a并画出根轨迹图;14s +82s +R(s)N(s)C(s)(ⅱ)确定根轨迹和虚轴的交点并由此确定使闭环系统稳定的K 值。
(ⅲ)确定系统输出无衰减振荡分量时的闭环传递函数。
三、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。
(25分)1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。
计算超调量%σ和调节时间s t四、某火炮指挥系统结构如下图所示,()(0.21)(0.51)KG s s s s =++系统最大输出速度为2r/min ,输出位置的容许误差小于2,(25分)求:1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41()0.081c s G s s +=+,试计算相位裕量。
()G s ()R s ()E s ()C s五、已知系统的结构图如图所示。
(25分)(ⅰ)求出系统的闭环脉冲传递函数。
《自动控制原理》(卢京潮,西北工业大学)第八章习题及答案[1]
![《自动控制原理》(卢京潮,西北工业大学)第八章习题及答案[1]](https://img.taocdn.com/s3/m/8d525e39580216fc700afdd2.png)
&1 ⎤ ⎡ 0 0 1 ⎤ ⎡ x1 ⎤ ⎡0⎤ ⎡x ⎢x ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ & ⎢ 2 ⎥ = ⎢ − 2 − 3 0 ⎥ ⎢ x 2 ⎥ + ⎢ 2⎥ u ⎢ &3 ⎥ 2 − 3⎥ ⎣0 ⎦⎢ ⎣0 ⎥ ⎦ ⎣x ⎦ ⎢ ⎣ x3 ⎥ ⎦ ⎢ ⎡ x1 ⎤ ⎥ y = x1 = [1 0 0]⎢ ⎢ x2 ⎥ ⎢ ⎣ x3 ⎥ ⎦
181
由上式,可列动态方程如下
⎡ &1 ⎤ ⎢0 ⎡x 1 ⎥ ⎢x ⎢ & 0 ⎢ 2 ⎥ = ⎢0 R f + K bCm a m ⎢ &3 ⎥ ⎦ ⎢0 − ⎣x La J m ⎢ ⎣
⎤ 0 ⎥ ⎥ 1 La f m + J m R a ⎥ ⎥ − La J m ⎥ ⎦
⎡ x1 ⎤ ⎢ ⎢ x ⎥ + ⎢0 ⎢ 2 ⎥ ⎢0 ⎢ ⎦ ⎢ ⎣ x3 ⎥ ⎢ Cm
182
⎡ ⎢ 0 由上式可得变换矩阵为 T = ⎢ 0 ⎢C ⎢ m ⎢ ⎣ Jm
8-2
1 0
⎤ 0 ⎥ 1 ⎥ f ⎥ 0 − m⎥ Jm ⎥ ⎦
&& + 6 & & + 11y & + 6 y = 6u 。式中 u 和 y 分别为系统输入、输 设系统微分方程为 & y y
出量。试列写可控标准型(即矩阵 A 为友矩阵)及可观测标准型(即矩阵 A 为友矩阵转置) 状态空间表达式,并画出状态变量图。 解: 由题意可得:
0⎤ ⎥ et ⎦
187
( sI − A) −1
⎡s + 1 0 ⎤ =⎢ s − 1⎥ ⎣ 0 ⎦
(NEW)西北工业大学《827信号与系统》历年考研真题汇编

2007年西北工业大学432信号与系统(A) 考研真题
2006年西北工业大学432信号与系统(A) 考研真题
2005年西北工业大学信号与系统考研真题
2004年西北工业大学432信号与系统考研真 题
2003年西北工业大学432信号与系统考研真 题
2002年西北工业大学536信号与系统考研真 题
2014年西北工业大学827信号与系统考研真 题(回忆版)
2011年西北工业大学432信号与系统(A) 考研真题
2010年西北工业大学827信号与系统(A) 考研真题
2009年西北工信号与系统(A) 考研真题
目 录
2014年西北工业大学827信号与系统考研真题(回忆版) 2011年西北工业大学432信号与系统(A)考研真题 2010年西北工业大学827信号与系统(A)考研真题 2009年西北工业大学信号与系统(B)考研真题 2008年西北工业大学827信号与系统(A)考研真题 2007年西北工业大学432信号与系统(A)考研真题 2006年西北工业大学432信号与系统(A)考研真题 2005年西北工业大学信号与系统考研真题 2004年西北工业大学432信号与系统考研真题 2003年西北工业大学432信号与系统考研真题 2002年西北工业大学536信号与系统考研真题
西北工业大学 自动控制原理考研真题

2013西工大821自动控制原理专业课回忆版共6道大题:1.常规时域题,利用程序框图,r(t),n(t),tr,等求三个未知数k1,k2,t2.常规根轨迹题目,用到D来求原式子,然后加入gc画出根轨迹图3.求稳态cst的,教案上习题应用,好像是分别求模值大小和角度即可4.常规pid校正,不过第二问让文字分析描述本题中的三频段5.常规题,第一问z变换就可以算出,第二问i型求误差6.常规利用na,gs求k和t,算出即可2012西北工业大学自动控制原理回忆版第一题:典型闭环系统加入了前馈控制并且含有未知数t,典型闭环控制开环增益k未知。
(1)当未知数t k为何值是系统等幅震荡(2)当系统为一阶无差系统求满足的t k(3)利用闭环主导极点化简系统方程求超调量和调节时间第二题:直接给出特征方程:三次,含有未知数k t(1)系统有三重负实根确定k t(2)利用求出来的t确定k从0——无穷的根轨迹(参数根轨迹)其中求出渐近线,和分离点第三题:系统两个转接频率2和18中间斜率为—20且高频延长线交为12,初始相角和末都是—180第一问画出概略对数幅频曲线。
第二问确定开环传函第三问是求截止频率和相角裕度第四问忘了第四题:不是典型的校正题没做出来其中给出了校正图G1(S)未知知和G(S)=1除(S+1)串联.让确定函数其中要求在n(t)干扰下的误差为0和kv为12还有就是保持截止频率而增大相角裕度为40但是根据G(s)我不知怎么求截止频率第五题:常规题但是其中有利用到差分方程求误差第六题:典型的1+N(a)G(s)=0不过N(a)是含有虚部的那个4mpeih那个求自震频率和幅值和K变化时对两者影响2014年西工大821自动控制原理考研真题回忆版第一题,三问,1,求K的范围2,好像求误差3.求前馈校正的Gc.第二题,大家都知道是根轨迹的,不过这次好像很多问,对我个人能力来说,比往年难多了,根轨迹要做了前两问才可以开始画,求渐近线,出始角,和虚轴交点。
西工大、西交大自动控制原理自动控制理论1-2章答案

第一章
第一章
▪ 1-8
▪ 解:被控对象:传送装置。被控量:输出谷物湿度。给 定量:期望的谷物湿度。
▪ 工作原理:由反馈通道的湿度测量装置测量加水后出口 处的输出谷物湿度,并将这个信号反馈到到调节器。如 果输出谷物的湿度与设在调节器中的希望谷物适度不一 致,则产生偏差信号,通过调节器控制增大或减小阀门 的开度,从而改变加水量的大小,使谷物湿度向减小偏 差的方向变化。顺馈控制的湿度测量装置测量的是加水 前鼓舞的湿度。这个信号有顺馈通道输入到调节器,根 据信号反应的适度情况控制阀门的开度。如果入口处谷 物较干,可适当开启阀门,增大进水量,反之则减小进 水量。
18
16
14
12
Amplitude
10
8
6
4
2
0
0
2
4
6
8
10
12
14
16
18
20
Time (sec)
第二章
▪ (2) :x t 2 e0.5t sin 3 t
3
2
系统的特征根为:1,2
1 2
3 2
j
方程的模态为:e1,2t
e
1 2
3 2
j
t
,
或者e
1 2
t
sin
3
t与e-
1 2
t
cos
3 t.
•
x0
•
x1
f1
•
x0
•
x1
K1 x1
K1 x1
f
2
•
xi
•
x0
K2
xi x0
f1
•
x0
•
x1
西北工业大学自动控制原理2001-2010
西北工业大学 2003 年硕士研究生入学考试试题
试题名称:自动控制原理 说 明:所有试题一律写在答题纸上 试题编号: 427 第 1 页 共 3 页
1. 本题 20 分 系统结构图如图 1 所示
(1) 确定使系统稳定的 a 值范围; (2) 在 r (t ) 1(t ) 作用下,要求系统的稳态误差 e ss 0 ,确定相应的 a 值; (3) 在满足(2)的条件下,求系统的截止频率 c 和相角裕度 。
2
(2)使系统稳定且为欠阻尼状态时的 K D 范围; (3)系统具有最佳阻尼比( 0.707 )的 K D 值及此时的系统闭环传递函数。
3. (此题 15 分)
已知单位反馈的最小相角系统,其开环 对数幅频特性如图 2 所示,试确定 (1)系统闭环传递函数; ; (2)系统的超调量 %,调节时间 t S ( 5 %) 。 (3)概略绘出系统开环幅相特性曲线(要求给出 0 时的渐近线)
2.(25 分) 系统结构图如图 2 所示 (1) 绘制当 K 0 0 变化时的系统根轨迹(求 出渐近线,分离点,与虚轴交点) ,确定使系 统稳定的开环增益 K 的取值范围; (2) 若已知闭环系统的一个极点为 1 1 ,试确 定系统的闭环传递函数。
西北工业大学 2004 年硕士研究生入学考试试题
Gc ( s )
0.05s 1 0.005s 1
试验证校正后系统是否满足要求。
西北工业大学 2004 年硕士研究生入学考试试题
试题名称:自动控制原理(A 卷) 说 明:所有答题一律写在答题纸上 试题编号: 427 第 3 页 共 3 页
Gc ( s )
*
(2 s 1)( s 1) (20 s 1)(0.01s 1)
2014考研西北工业大学《821自动控制原理》模拟题解析部分

专业课模拟题解析课程第1讲模拟题一解析(一)一、(25分)某系结构图如下图所示,该系统的单位阶跃响word文档可自由复制编辑word 文档 可自由复制编辑 应如右图。
(1)求该系统结构图中未知参量v,k,T.(2)当T 不等于零时,求a 的值,使该系统的单位斜坡误差1ss e = 考点:(1)阶跃响应的导数是脉冲响应,脉冲响应的s 域表达式就是系统的传递函数。
(2)稳态误差的算法解:,a s K Ts s a s K s v+=++=Φ)()1()()(word 文档 可自由复制编辑或者 (2)由梅森公式可得,该系统的误差传递函数为:221()21(1)e s ss s a s s a s s φ+==+++++ ⎪⎩⎪⎨⎧===1110T v K ⎪⎩⎪⎨⎧===0210T v Kword 文档 可自由复制编辑22220011lim *()*lim **12e s s s s s s s s s s a sφ→→+==++ a=1二、(25分)已知系统结构图,K *= 0→∞,绘制系统根轨迹并确定: (1)使系统稳定且为欠阻尼状态时开环增益 K 的取值范围; (2) 当3λ =-5 时,1,2λ=?相应 K=?解:*()(2)(4)K G s s s s =++*81K K v ⎧=⎨=⎩word 文档 可自由复制编辑① 实轴上的根轨迹:[-∞,-4], [-2,0]② 渐近线: ③ 分离点:整理得:舍去第二个结果,可得: ④ 虚轴交点:111024d d d ++=++231280d d ++=120.845; 3.155d d =-=-0.845*24 3.08d d K d d d =-=++=*32*()(2)(4)680D s s s s K s s s K =+++=+++=使系统稳定且为欠阻尼状态时开环增益 K 的取值范围:(2)由题意,可用长除法进行运算:32*(5)(3)=+++s s s=+++2()68D s s s s K*8158 1.875K K===word文档可自由复制编辑word 文档 可自由复制编辑则三、(25分)已知最小相角系统 L(w) 如图所示,试确定(1) 开环传递函数G(s);(2) 由 γ 确定系统的稳定性;(3) 将 L(w) 右移10倍频,讨论对系统的影响。
西北工业大学信号与系统827考研真题

2014西工大信号与系统827回忆版
信号与系统今年的出题是60分的小型大题,每题六分,和90分的综合大题,每题十五分大概写写,具体题号忘了
一
给定电路求自然频率及微分方程
将Sa(t)分解成cos(t)的基本形式
求离散信号的卷积和求连续信号的卷积
求信号能量
判断系统等价不等价分析线性时不变
有些基本题忘了,其他的都比较基础吧。
二
给定sgnt函数和sa(t)求两信号卷积后的值
给定信号流图求z域稳定,系统函数,和稳态响应
给定系统框图,用状态变量分析稳定
求系统初值和终值。
这个题出的很巧妙
电路s域分析
s域抽样和z域离散互换很有难度。
《自动控制原理》(卢京潮,西北工业大学)第二章习题及答案
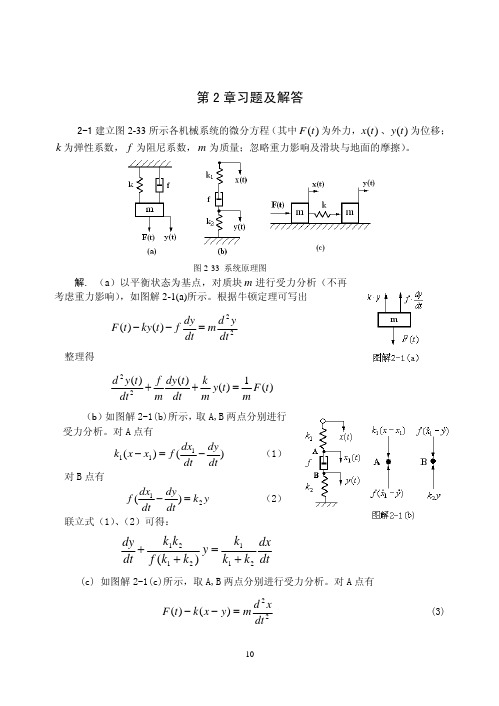
2-1 建立图 2-33 所示各机械系统的微分方程 (其中 F (t ) 为外力,x (t ) 、 y (t ) 为位移;
k 为弹性系数, f 为阻尼系数, m 为质量;忽略重力影响及滑块与地面的摩擦) 。
图 2-33 系统原理图
解. (a)以平衡状态为基点,对质块 m 进行受力分析(不再 考虑重力影响) ,如图解 2-1(a)所示。根据牛顿定理可写出
微分方程为
duc2 du r2 3 du c 1 2 du r 1 u + + = + + 2 2 ur c 2 2 2 2 dt CR dt C R dt CR dt C R
(c) 由图解 2-2(c)可写出
U r ( s ) = R1 [ I1 ( s ) + I 2 ( s ) ] + ( Ls + R2 ) I 2 ( s )
对 B 点有
dx1 dy − ) dt dt
(1)
f(
dx1 dy − ) = k2 y dt dt
(ቤተ መጻሕፍቲ ባይዱ)
联立式(1) 、 (2)可得:
k1 k 2 k1 dx dy + y= dt f (k1 + k 2 ) k1 + k 2 dt
(c) 如图解 2-1(c)所示,取 A,B 两点分别进行受力分析。对 A 点有
2
图 2-37 单摆系统
将上式中非线性项 sin θ 在平衡点 θ 0 = 0 附近进行泰勒级数展开, 取一次近似有
sin θ = sin θ 0 +
d sin θ |θ0 ⋅Δθ = sin θ 0 + cos θ 0 ⋅ Δθ dt
将 θ 0 = 0 代入上式,得: sin θ − sin θ 0 = Δθ 。代入原方程可得线性化后的单摆方程
西工大、西交大自动控制原理答案

第一章
湿度测量装置
输入谷物浓度 输出谷物浓度
调节器
给定 湿度
阀门
传送装置
湿度测量装置
LOGO
第一章
▪ 1-10:
▪ 提示:以叠加性和均匀性来判定是否是线性系
统:以系数是否与自变量有关判定是否定常系
统。
▪
解:1:
阻、 电容、 电感。 流过这三种阻抗元件的电
流i与电压u的关系是
▪ 电阻: u Ri ;
▪ 电容: du 1 i ;
▪
dt C
▪ 电感:u L di
。
dt
LOGO
▪
对以上各等式两边作拉氏变换(零初始
条件), 得:
▪
电阻:
▪
U(s)=RI(s)
▪ 可见电阻R的复阻抗仍为R。
动伺服电动机带动绞盘转动,将大门向上提起。与此同
时,和大门连在一起的电刷也向上移动,使得偏差电压
逐渐减小,直到桥式测量电路达到平衡,电动机停止转
动,大门达到开启位置。反之,当合上关门开关时,电
动机带动绞盘使大门关闭,从而可以实现大门远距离开
闭自动控制。系统方框图如所示。
LOGO
LOGO
第一章
解:被控对象:仓库大门。被控量:大门的实际位置。给 定量:开关位置。比较元件:电桥电路。放大元件:放 大器。执行元件:伺服电动机。
▪ 系统工作原理:
当合上开门开关时,电桥会测量出开门位置与大门实际
位置间对应的偏差电压,偏差电压经放大器放大后,驱
第二章
▪ 2-11: ▪ 解:对(1)式取拉氏变换得:
G
s
C E
s s
2014年西北工业大学自动化学院复试大纲--946专业综合(2014年推免用)[试题]
![2014年西北工业大学自动化学院复试大纲--946专业综合(2014年推免用)[试题]](https://img.taocdn.com/s3/m/62fbc1cecf2f0066f5335a8102d276a20129605e.png)
自动化学院硕士研究生录取综合考试大纲0 00000每道小题20分,每位考生共需做100分值题目000000一(40分)000001、传感器的静动态特性、常用传感器的基本工作原理与测量电路。
000002、常用非电量(常用工业量)检测的基本原理。
00000参考书目:0000(1) 郁有文等编著.《传感器原理及工程应用》(第三版).西安电子科技大学出版社.000000(2) 徐科军等编著.《传感器与检测技术》.电子工业出版社.000000(3) 陈明.《传感器原理与检测技术》.西北工业大学出版社.000000二(40分)000001、微机原理:计算机基础;中断的基本概念;输入输出接口电路。
000002、单片机原理及其接口技术。
0000(1) 中断结构与中断流程。
复习要点:a) CPU对中断的处理流程,中断标志寄存器IFR、中断允许寄存器IER和中断屏蔽位INTM的作用;b) 编写中断服务程序ISR时应遵循的原则;0000(2) 异步串行数据通信。
复习要点:a) 异步串行数据通信的数据帧格式;b) 起始位的作用,收发双方波特率差异的允许范围。
00003、常用计算机及外设接口总线基本概念及构成。
0000参考书目:0000(1) 牛小兵,许爱德,王丹.《DSP控制器实用教程》.北京:国防工业出版社.2007.000000(2) 谢拴勤主编.《DSP控制器原理》.电子工业出版社出版.2008.000000三(40分)000001、掌握线性系统的三种分析方法:时域、根轨迹和频率域分析方法;并能熟练应用其判断、分析和计算线性系统的稳定性、动态性能和稳态误差;掌握反馈校正和复合校正的作用,并能利用这些方法来提高和改善系统的性能。
000002、掌握线性系统频率特性的有关概念:能够熟练地绘制系统的开环对数频率特性;理解稳定裕度的意义和计算方法;理解三频段的概念,了解频率域串联校正的方法和步骤。
00000参考书目:0000(1) 卢京潮主编.《自动控制原理》.西北工业大学出版社.00000(2) 刘慧英主编.《自动控制原理》.考研教案.西北工业大学出版社.00000四(40分)000001、电机知识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年西北工业大学考研821自动控制原理试题
一、
1.求K的范围
2.好像求误差
3.求前馈校正的Gc.
二、根轨迹的
这次好像很多问,,比往年难多了,根轨迹要做了前两问才可以开始画,求渐近线,出始角,和虚轴交点。
最后一问,负实轴上有一根0.5.求闭环传递函数,超调量,Ts.和当时我太紧张,都没有做好,
三、求截止频率,和相角裕度。
具体的忘记了。
四、校正,但是今年的难了,还好多问,重点看看第五章校正部分的,每个点都弄懂,今年的考滞后校正的。
五、朱利判据,求K范围。
开始给了个差分方程。
第一求误差的,第六题,考得还是函数分析法的,第一问求K对稳定性的影响,还有今年考了两个非线性系统的串联,如果串联不好,这道题目就难做了,线性的是一型三阶的,幅相曲线好画的。
文章来源:西北工业大学考研网,转载请注明出处,更多资料请关注
文彦考研论坛。