运动控制器说明
乐创自动化技术 MPC05GA 运动控制器 说明书

9 高速平面轨迹运动........................................................33
9.1 功能描述............................................................................................33 9.2 参数说明............................................................................................33 9.3 编程实现............................................................................................34
8 人机界面........................................................................31
8.1 协议及系统设置................................................................................31 8.2 地址....................................................................................................31 8.3 MPC05GA 的基本功能示例.............................................................32
IIห้องสมุดไป่ตู้
MPC05GA 运动控制器用户手册
MPC2860运动控制器用户手册说明书
MPC2860运动控制器用户手册(1.3版)版权申明成都乐创自动化技术股份有限公司保留所有权利成都乐创自动化技术股份有限公司(以下简称乐创自动化)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权利。
乐创自动化不承担由于使用本手册或本产品不当,所造成直接的、间接的、附带的或相应产生的损失或责任。
乐创自动化具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或间接地复制、制造、加工、使用本产品及其相关部分。
前言感谢购买MPC2860运动控制器!MPC2860是从本公司研制的一款高性能通用控制器。
本手册介绍了关于MPC2860的规格、使用方法,使用前请充分理解MPC2860的使用功能。
安全警告注意以下警告,以免伤害操作人员及其他人员,防止机器损坏。
◆下面的“危险”和“警告”符号是按照其事故危险的程度来标出的。
◆下列符号指示哪些是禁止的,或哪些是必须遵守的。
指示一个潜在的危险情况,如果不避免,将导致死亡或严重伤害。
危险指示一个潜在的危险情况,如果不避免,将导致轻度或中度伤害,或物质损坏。
这个符号表示禁止操作。
这个符号表示须注意的操作。
警告常规安全概要请查看下列安全防范措施以避免受伤害并防止对本产品或任何与其相连接的产品造成损伤。
为避免潜在的危险,请按详细说明来使用本产品。
使用正确的电源线。
请使用满足国家标准的电源线。
正确地连接和断开。
先将控制卡输出连接至转接板,再将电机、驱动器连接到转接板,最后开启电源。
断开时先关闭外部电源,再断开电机、驱动器与转接板的连接,最后断开控制卡与转接板的连接。
当有可疑的故障时不要进行操作。
如果您怀疑本产品有损伤,请让有资格的服务人员进行检查。
不要在的湿的/潮湿环境下操作。
不要在爆炸性的空气中操作。
保持产品表面清洁和干燥。
防止静电损伤。
静电释放(ESD)可能会对运动控制器及其附件中的元件造成损伤。
为了防止ESD,请小心处理控制器元件,不要触摸控制器上元器件。
迈科讯 AMC8300运动控制器 硬件使用手册说明书

产品说明书AMC8300运动控制器硬件手册AMC8300硬件使用手册(文档版本)文档版本版本号修订日期修订内容V1.12016.12.13初稿V1.22017.1.6增加转接板接口定义V1.32017.2.23修改了2.2的图序号V1.42017.7.31增加台州亿丰驱动器接线图V1.52017.10.31增加禾川、研控、儒竞驱动器接线图第一章概述 (5)1.1简介 (5)1.2产品特点 (6)1.3型号说明 (7)1.4硬件规格 (7)1.5控制器外观与安装尺寸 (8)第二章控制模式 (9)2.1控制模式与接线 (9)2.1.1Alone(AMC+VGA)模式 (9)2.1.2A+PC模式 (11)2.2系统控制架构 (13)2.2.1八轴同步/异步开路脉冲控制 (13)2.2.2八轴闭回路电压(速度命令)输出控制 (14)2.2.3近端数字输入输出 (15)2.2.4远端数字输入输出 (15)2.2.5模数转换器(8组ADC) (16)2.2.6数模转换器(8组DAC) (16)第三章使用说明 (17)3.1开箱检查 (17)3.2安装环境 (17)3.3准备工作 (17)第四章硬件说明 (19)4.1控制器型号规格参数说明 (19)4.2接口信号定义 (21)4.2.1Axis(8个轴轴控信号) (22)4.2.2Ethernet A+PC模式网口 (23)4.2.3RS232&RS422连接终端 (23)4.2.4VGA标准接口 (23)4.2.5EtherCAT专用总线接口 (23)4.3滤波板 (24)4.3.1接口五说明 (24)4.4转接板 (25)4.4.1GPIO与LIO引脚定义 (26)4.4.2GPIO说明 (27)4.4.3232接口说明 (28)4.4.4RS485接口说明 (29)4.4.5MPG接口说明 (29)4.5远端串行RIO&ARIO板 (30)第五章驱动器接线与参数设置 (33)5.1英威腾伺服驱动器 (33)5.1.1英威腾DA100伺服驱动器连接示意图 (33)5.1.2英威腾DA100伺服驱动器绝对式编码器配线图 (33)5.1.3英威腾DA100伺服驱动器驱动器参数设置 (34)5.1.4英威腾DA200伺服驱动器连接示意图 (36)5.1.5英威腾DA200伺服驱动器绝对式编码器配线图 (36)5.1.6英威腾DA200伺服驱动器驱动器参数设置 (37)5.2台达伺服驱动器 (39)5.2.1台达ASDA_A2系列伺服驱动器连接示意图 (39)5.2.2台达ASDA_B2系列伺服驱动器连接示意图 (40)5.2.3台达ASDA_A2、ASDA_B2驱动器绝对式编码器配线图 (40)5.2.4台达ASDA_A2伺服驱动器参数设置 (41)5.3山洋伺服驱动器 (43)5.3.1山洋R2驱动5668连接示意图 (43)5.3.2山洋驱动器绝对式编码器配线图 (44)5.3.3山洋伺服驱动器参数设置 (44)5.4图科I GD伺服驱动器 (46)5.4.1图科iGD系列伺服驱动器连接示意图 (46)5.4.2图科驱动器绝对式编码器配线图 (47)5.4.3图科伺服驱动器参数设置 (47)5.5松下伺服驱动器 (48)5.5.1松下A4、A5伺服驱动器连接示意图 (48)5.5.2松下A4、A5驱动器绝对式编码器配线图 (49)5.5.3松下A4驱动器参数配置 (49)5.5.4松下A5驱动器参数配置 (49)5.6迈信伺服驱动器 (51)5.6.1迈信Maxsine EP3系列伺服驱动器连接示意图 (51)5.6.2迈信驱动器绝对式编码器配线图 (52)5.6.3迈信驱动器参数配置 (52)5.7多摩川伺服驱动器 (53)5.7.1多摩川TAMAGAWA TA系列伺服驱动器连接示意图 (53)5.7.2多摩川TAMAGAWA TA系列驱动器绝对式编码器配线图 (54)5.7.3多摩川TAMAGAWA TA系列驱动器参数配置 (54)5.8高创CDHD伺服驱动器 (55)5.8.1高创CDHD系列伺服驱动器连接示意图 (55)5.8.2高创驱动器绝对式编码器配线图 (56)5.9.1欧瑞伺服驱动器连接示意图 (57)5.9.2欧瑞驱动器绝对式编码器配线图 (58)5.10台州亿丰伺服驱动器 (59)5.10.1台州亿丰伺服驱动器连接示意图(标准版) (59)5.10.2台州亿丰伺服驱动器连接示意图(进阶版) (60)5.10.3台州亿丰伺服驱动器绝对式编码器配线图(标准版) (61)5.10.4台州亿丰伺服驱动器绝对式编码器配线图(进阶版) (61)5.11研控伺服驱动器 (62)5.11.1研控AS1伺服驱动器连接示意图 (62)5.11.2研控AS1伺服驱动器绝对式编码器配线图 (63)5.11.3研控AS1伺服驱动器驱动器参数设置 (63)5.12禾川伺服驱动器 (64)5.12.1禾川SV-X3伺服驱动器连接示意图 (64)5.12.2禾川SV-X3伺服驱动器绝对式编码器配线图 (65)5.12.3禾川SV-X3伺服驱动器驱动器参数设置 (65)5.13上海儒竞伺服驱动器 (66)5.13.1上海儒竞SE A2伺服驱动器连接示意图 (66)5.13.2上海儒竞SE A2伺服驱动器绝对式编码器配线图 (66)附录一:系统更新说明 (67)第一章概述1.1简介由本公司所开发的AMC(Intelligent Motion Control Chip)运动控制平台,运用DDA原理由PGE(Pulse Generator)①均匀送出各轴脉波移动量,实现八轴定位及同动/不同动控制。
PMC100B控制器用户手册

PMC100B运动控制器说明书目 录第一章 概要.....................................................................................................................................3 第二章 控制器使用说明.................................................................................................................4 第三章 编程说明 (13)2.1 PMC100B 指令系统功能................................................................................................13 2.2 PMC100B 指令系统变量 (13)2.2.1 S 变量....................................................13 2.2.2 M 变量....................................................14 2.3 PMC100B 指令表............................................................................................................14 2.4 PMC100B 指令说明.. (17)2.4.1 2.4.1 指令参数说明指令参数说明..............................................17 2.4.2 2.4.2 指令系统详细解释指令系统详细解释..........................................17 运动控制指令类(motion).......................................17 命令控制类指令(Command).......................................18 跳转类指令(Jump).............................................21 逻辑类指令(Logic)..............................................22 运算类(Arithmetic).............................................24 数据传送类指令(Data).........................................25 2.5程序格式规范...................................................................................................................26 2.6 变量使用说明..................................................................................................................26 2.8 结束语 (28)、610个通用输入点 个输出点PMC100控制器可以控制驱动一路步进电机PMC100控制器PMC100步进电机控制器第一章第一章 概要概要敬爱的用户:你好!非常感谢您使用。
科威自控运动控制器 HM系列参考手册说明书
黄石市科威自控有限公司资料编号:20210901-V14第一章安全注意事项 (1)第二章运动控制器选型 (3)2.1主要功能 (3)2.2型号说明 (4)第三章运动控制器安装与尺寸 (5)3.1运动控制器安装 (5)3.1.1安装场所 (5)3.1.2环境条件 (5)3.1.3安装方向与间隔 (5)3.2运动控制器尺寸 (6)第四章运动控制器接口 (7)4.1电源配线 (7)4.2状态识别 (8)4.3开关量输入 (8)4.4开关量输出 (9)第五章PLC 功能 (11)5.1软元件介绍 (11)5.1.1输入输出继电器[X],[Y] (12)5.1.2辅助继电器[M] (13)5.1.3状态继电器[S] (14)5.1.4定时器[T] (15)5.1.5计数器[C] (17)5.1.6数据寄存器[D] (22)5.1.7扩展寄存器[R] (24)5.1.8变址寄存器[V],[Z] (25)5.1.9标记指针[P],[I] (26)5.1.10常数[K],[H] (28)5.1.11掉电保护 (28)5.2基本逻辑指令 (28)5.2.1[LD],[LDI],[OUT]指令 (30)5.2.2[AND],[ANI]指令 (31)5.2.3[OR],[ORI]指令 (32)5.2.4[LDP],[LDF],[ANDP],[ANDF],[ORP],[ORF]指令 (33)5.2.5[ORB]指令 (34)5.2.6[ANB]指令 (35)5.2.7[MPS],[MRD],[MPP]指令 (36)5.2.8[MC],[MCR]指令 (39)5.2.9[INV]指令 (41)5.2.10[ALT]指令 (42)5.2.11[PLS],[PLF]指令 (43)目录5.2.13对应计数器软元件C的[OUT],[RST]指令 (45)5.2.14[NOP],[END]指令 (46)5.2.15编程注意事项 (47)5.3步进顺控指令 (48)5.3.1[STL],[RET]指令 (48)5.3.2分支与汇合 (49)5.3.3循环与跳转 (50)5.3.4步进指令应用示例 (50)5.4常规功能指令 (52)5.4.1条件跳转[CJ] (54)5.4.2子程序调用[CALL]/子程序返回[SRET] (56)5.4.3主程序结束[FEND] (57)5.4.4循环范围开始[FOR]/循环范围结束[NEXT] (58)5.4.5监视定时器[WDT] (60)5.4.6开始比较[LD□] (61)5.4.7并联比较[OR□] (62)5.4.8串联比较[AND□] (63)5.4.9数据比较[CMP] (64)5.4.10区域比较[ZCP] (65)5.4.11传送[MOV] (66)5.4.12成批传送[BMOV] (68)5.4.13多点传送[FMOV] (70)5.4.14高低字节交换[SWAP] (72)5.4.15两个数据交换[XCH] (73)5.4.16批次复位[ZRST] (74)5.4.17反向传送[CML] (76)5.4.18加法[ADD] (77)5.4.19减法[SUB] (78)5.4.20乘法[MUL] (79)5.4.21除法[DIV] (80)5.4.22加1[INC],减1[DEC] (82)5.4.23求平均值[MEAN] (83)5.4.24逻辑与[WAND],逻辑或[WOR],逻辑异或[WXOR] (84)5.4.25求负[NEG] (87)5.4.26开方[SQR] (89)5.4.27循环左移[ROL],循环右移[ROR] (90)5.4.28带进位循环左移[RCL],带进位循环右移[RCR] (92)5.4.29位左移[SFTL],位右移[SFTR] (94)5.4.30字左移[WSFL],字右移[WSFR] (96)5.4.31移位读出[SFRD] (99)5.4.32移位写入[SFWR] (100)5.4.33整型转浮点[FLT] (101)5.4.34浮点转整型[INT] (102)5.4.36二进制转BCD[BCD] (104)5.4.37十六进制转ASCII[ASCI] (105)5.4.38ASCII转十六进制[HEX] (106)5.4.39浮点比较[ECMP] (107)5.4.40浮点区域比较[EZCP] (108)5.4.41浮点加法[EADD] (109)5.4.42浮点减法[ESUB] (110)5.4.43浮点乘法[EMUL] (111)5.4.44浮点除法[EDIV] (112)5.4.45浮点十进制转浮点二进制[EBIN] (113)5.4.46浮点二进制转浮点十进制[EBCD] (114)5.4.47浮点开方[ESQR] (116)5.4.48浮点SIN运算[SIN] (117)5.4.49浮点COS运算[COS] (118)5.4.50浮点TAN运算[TAN] (119)5.4.51浮点ASIN运算[ASIN] (120)5.4.52浮点ACOS运算[ACOS] (121)5.4.53浮点ATAN运算[ATAN] (122)5.4.54浮点RAD运算[RAD] (123)5.4.55浮点DEG运算[DEG] (124)5.4.56输入输出刷新[REF] (125)5.4.57PID控制[PID] (127)5.5中断系统 (130)5.5.1中断资源介绍 (130)5.5.2中断执行流程 (130)5.5.3中断指令[EI],[IRET],[DI] (132)5.5.4中断嵌套 (133)5.5.5定时器中断 (134)5.5.6外部输入中断 (135)5.5.7系统软中断 (136)5.5.8高级中断 (137)5.6虚拟示波器 (141)5.6.1触发方式 (141)5.6.2触发单元 (142)5.6.3触发门限 (142)5.6.4采样周期 (142)5.6.5采样点数 (142)5.6.6记录起始寄存器序号 (143)5.6.7记录区间起始寄存器序号 (144)5.6.8记录区间终止寄存器序号 (144)5.6.9示波器状态设置/显示 (145)5.6.10当前采样点 (145)5.6.11通道工作模式 (145)5.7特殊辅助继电器[M],特殊数据寄存器[D] (147)5.7.1特殊辅助继电器[M]功能一览表 (147)5.7.2特殊辅助寄存器[D]功能一览表 (154)第六章通信功能 (161)6.1通信原理 (161)6.1.1通信方式 (161)6.1.2网络系统结构 (162)6.2串口初始化[UINIT] (164)6.3计算机链接协议 (166)6.3.1通信格式 (166)6.3.2任务调度配置 (169)6.3.3通信示例 (171)6.4MODBUS协议 (173)6.4.1通信格式 (173)6.4.2软元件通信地址 (174)6.4.3MODBUS指令 (174)6.4.4通信示例 (184)6.5自由协议 (185)6.5.1任务调度配置 (185)6.5.2自由协议指令 (187)6.5.3通信示例 (189)6.6其他协议 (191)第七章扩展模块 (192)7.1扩展寄存器 (192)7.2模拟量模块 (193)7.2.1模块规格 (193)7.2.2模块读写控制 (195)7.2.3输入模拟量 (196)7.2.4输出模拟量 (196)7.3开关量模块 (198)7.3.1模块规格 (198)7.3.2模块读写控制 (200)第八章运动控制 (201)8.1运动控制指令 (201)8.2运动轴对象 (202)8.2.1运动轴定义 (202)8.2.2运动输入轴参数配置 (203)8.2.3运动输出轴参数配置 (204)8.3单轴基本运动 (217)8.3.1回原点[HOME] (218)8.3.2点动[JOG] (221)8.3.3定位[PSOUT] (225)8.3.4制表[PTAB] (227)8.3.6插补[IPL] (238)8.3.7定速定长输出[DPLSY] (240)8.3.8加减速定长输出[DPLSR] (242)8.3.9相对定位[DDRVI] (244)8.3.10绝对定位[DDRVA] (246)8.3.11中断定位[DDVIT] (248)8.3.12变速输出[DPLSV] (250)8.3.13高速读出[DHMOV] (252)8.3.14高速比较置位[DHSCS] (253)8.3.15高速比较复位[DHSCR] (255)8.3.16高速区间比较[DHSZ] (257)8.3.17高速表格比较输出[DHSCT] (259)8.4单轴关联运动 (261)8.4.1电子齿轮[GEAR] (261)8.4.2电子凸轮[CAM] (264)8.4.3追剪正程/滚切制表[PCTAB] (283)8.4.4追剪返程制表[PBTAB] (289)安全警告和标识第一章安全注意事项警告标识含义该标识表示若操作错误则可能发生“死亡或重伤”该标识表示若操作错误则可能发生“人身伤害或财产损害”安全标识含义该图形表示“不可实施”的内容该图形表示“必须实施”的内容切勿在有水的地方、存在腐蚀性、引火性气体的环境内以及可燃物旁使用,容易发生火灾不要在振动和冲击激烈的地方使用不要用湿手进行接线和设备操作切勿将手伸入运动控制器内部不要使导线受到损伤或承受过大的外力、重压、受夹切勿用裸手检查伺服接线故障,容易引发触电应在尘埃较少,不会接触到油、水的地方放置请进行正确的接线,否则可能发生火灾或故障导线应连接好,通电部位须通过绝缘套做到绝缘运动控制器必须实际接地外部应设置紧急停止电路,以确保紧急时可及时地停止运转、切断电源运动控制器的移动、接线、检查等要在切断电源并确保放电结束后没有触电危险的前提下进行必须设置过电流保护装置、漏电断路器、温度防护装置以及紧急停止装置安全注意事项不要在运动控制器上放置重物不要使运动控制器受到较强的冲击不要频繁地开、关主电源不要对运动控制器进行长时间极限情况测试切勿自行改造、分解、修理严格按照正确的安装方法安装运动控制器确保运动控制器在规定的温度和湿度范围内运行发生故障时请清除故障、确保安全后再重新运行运动控制器发生故障时请切断电源第二章运动控制器选型2.1主要功能●掉电数据保存掉电保存数据功能,运动控制器可以在断电时自动保存用户数据。
DVP-15MC系列运动控制器操作手册说明书

DVP -15MC 系列运动控制器操作手册DVP-15MC 系列运动控制器操作手册地址:上海市浦东新区民夏路238号邮编:201209电话:(021)5863-5678传真:(021)5863-0003网址:DVP-0199410-042020/01/13上海电话:(021)6301-2827传真:(021)6301-2307武汉电话:(027)8544-8265传真:(027)8544-9500济南电话:(0531)8690-7277传真:(0531)8690-7099乌鲁木齐电话:(0991)6118-160传真:(0991)6118-289沈阳电话:(024)2334-1612传真:(024)2334-1163南昌电话:(0791)8625-5010传真:(0791)8625-5102长沙电话:(0731)8827-7881传真:(0731)8827-7882郑州电话:(0371)6384-2772传真:(0371)6384-2656西安电话:(029)8669-0780传真:(029)86690780-8000长春电话:(0431)8892-5060传真:(0431)8892-5065合肥电话:(0551)6281-6777传真:(0551)6281-6555南宁电话:(0771)5879-599传真:(0771)2621-502北京电话:(010)8225-3225传真:(010)8225-2308成都电话:(028)8434-2075传真:(028)8434-2073南京电话:(025)8334-6585传真:(025)8334-6554厦门电话:(0592)5313-601传真:(0592)5313-628天津电话:(022)2301-5082传真:(022)2335-5006重庆电话:(023)8806-0306 传真:(023)8806-0776杭州电话:(0571)8882-0610传真:(0571)8882-0603广州电话:(020)3879-2175传真:(020)3879-2178太原电话:(0351)4039-475传真:(0351)4039-047哈尔滨电话:(0451)5366-0643传真:(0451)5366-0248绵密网络 专业服务中达电通已建立了48个分支机构及服务网点,并塑建训练有素的专业团队,提供客户最满意的服务,公司技术人员能在2小时内回应您的问题,并在48小时内提供所需服务。
运动控制器“原点返回”的14种模式及参数说明
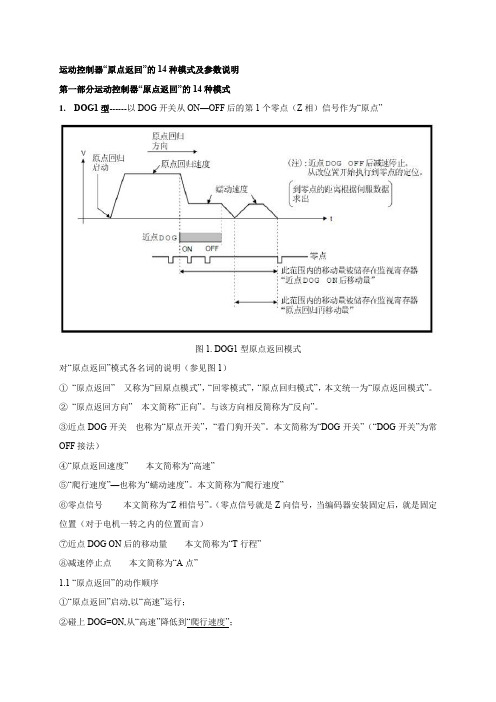
运动控制器“原点返回”的14种模式及参数说明第一部分运动控制器“原点返回”的14种模式1.DOG1型------以DOG开关从ON—OFF 后的第1个零点(Z相)信号作为“原点”图1. DOG1型原点返回模式对“原点返回”模式各名词的说明(参见图1)①“原点返回”---又称为“回原点模式”,“回零模式”,“原点回归模式”,本文统一为“原点返回模式”。
②“原点返回方向”---本文简称“正向”。
与该方向相反简称为“反向”。
③近点DOG开关---也称为“原点开关”,“看门狗开关”。
本文简称为“DOG开关”(“DOG开关”为常OFF接法)④“原点返回速度”------本文简称为“高速”⑤“爬行速度”—也称为“蠕动速度”。
本文简称为“爬行速度”⑥零点信号-------本文简称为“Z相信号”。
(零点信号就是Z向信号,当编码器安装固定后,就是固定位置(对于电机一转之内的位置而言)⑦近点DOG ON后的移动量------本文简称为“T行程”⑧减速停止点------本文简称为“A点”1.1 “原点返回”的动作顺序①“原点返回”启动,以“高速”运行;②碰上DOG=ON,从“高速”降低到“爬行速度”;③当DOG从ON---OFF,从“爬行速度”减速停止,速度降为零。
又从“零速”上升到“爬行速度”,当检测到第1个“Z相信号”时,该“Z相信号”位置就是“原点”。
同时该轴停止在原点位置上。
(从“减速停止点A”到“Z相)信号”点是定位过程,所以能够精确定位)1.2 “原点返回”不能正常执行的原因(1)从“原点返回启动位置”到“减速停止点A”这一区间内如果没有经过“Z相信号”点一次,(Z相通过信号M2406+20N),系统会产生报警(ZCT)并减速停止。
(ZCT)(错误代码120). “原点返回”不能正常执行。
(这种情况是“原点返回启动位置”到“DOG”距离很短。
走完DOG的行程还没经过“Z相信号”,系统无法识别“Z相信号”位置。
东方电气 EAC200 系列运动控制器 使用手册说明书

目录第一章概述.............................................................................................................................. - 1 -1.1EAC200系列运动控制器简述..................................................................................... - 1 -1.2 EAC200系列运动控制器命名规范及订货信息............................................................... - 1 -1.3 EAC200系列运动控制器技术规格及工作环境参数....................................................... - 6 -1.4安全注意事项.................................................................................................................... - 7 -1.4.1 安全信息定义........................................................................................................ - 7 -1.4.2 警告标示................................................................................................................ - 7 -1.4.3 安全指导................................................................................................................ - 7 -第二章运动控制器硬件介绍.................................................................................................. - 8 -2.1控制器外形结构................................................................................................................ - 8 -2.2外形尺寸及安装方式........................................................................................................ - 9 -2.2.1外形尺寸................................................................................................................. - 9 -2.2.2控制器安装方式................................................................................................... - 10 -2.3运动控制器本体部分...................................................................................................... - 10 -2.3.1控制器本体运行状态指示及系统工作状态 ....................................................... - 10 -2.3.2 DIP拨码开关 ........................................................................................................ - 11 -2.3.3控制器本体对外接口........................................................................................... - 12 -2.3.4控制器输入(DI) ............................................................................................... - 14 -2.3.5控制器输出(DO).............................................................................................. - 15 -2.3.6 数字量DI/DO接线图.......................................................................................... - 16 -2.4运动控制器数字量拓展IO部分 .................................................................................... - 17 -2.4.1控制器数字量拓展IO运行状态指示及系统工作状态 ..................................... - 17 -2.4.2 DI 16*DC24............................................................................................................ - 17 -2.4.3 DO 16*DC24 .......................................................................................................... - 19 -2.4.4 DI 8*DC24+DO 8*DC24 ......................................................................................... - 21 -第三章控制器软件功能........................................................................................................ - 25 -3.1概述.................................................................................................................................. - 25 -3.2 控制器软件功能及设置................................................................................................. - 25 -I3.2.1网页设置功能....................................................................................................... - 25 -3.2.2 U盘更新功能 ....................................................................................................... - 27 -3.3上位机软件CODESYS ...................................................................................................... - 28 -3.3.1概述....................................................................................................................... - 28 -3.3.2 CODESYS的安装 ................................................................................................... - 28 -3.3.3基本界面............................................................................................................... - 33 -3.3.4示例程序安装....................................................................................................... - 33 -3.3.5设备描述文件的安装与更新............................................................................... - 35 -3.3.6 库文件的安装与更新.......................................................................................... - 37 -3.3.7创建一个示例程序............................................................................................... - 38 -第四章故障分析与解决........................................................................................................ - 66 -附录1:......................................................................................................................................... - 67 -CmpEuraFunctions组件库说明: ........................................................................................ - 67 -枚举数据定义:............................................................................................................ - 67 -结构体数据定义:........................................................................................................ - 68 -函数定义:.................................................................................................................... - 68 -附录2:......................................................................................................................................... - 73 -Modbus RTU使用说明:...................................................................................................... - 73 -概述:............................................................................................................................ - 73 -Modbus RTU 主站及其实现: ..................................................................................... - 73 -Modbus RTU 从站及其实现: ..................................................................................... - 77 -敬告用户:.................................................................................................................................... - 83 -II第一章概述本章简要介绍了EAC200系列运动控制器主要特点。
CM25说明书

CM25L 系列运动控制器(步进电机控制器)说明书北京时代超群科技有限公司1. 安全须知★★ 在使用本控制系统前,请您仔细阅读本手册后再进行相关的操作。
仔细阅读本操作说明书,以及用户安全须知,采取必要的安全防护措施。
如果用户有其他需求,请与本公司联系。
工作环境及防护1. 控制系统的工作环境温度为0-40℃,当超出此环境温度时系统可能会出现工作不正常甚至死机等现象。
温度过低(零下)时,液晶显示器将会出现不正常显示的情况。
2. 相对湿度应控制在0-85%。
3. 在高温、高湿、腐蚀性气体的环境下工作时,必须采取特殊的防护措施。
4. 防止灰尘、粉尘、金属粉尘等杂物进入控制系统。
5. 应防护好控制系统的液晶屏幕(易碎品):使其远离尖锐物体;防止空中的物体撞到屏幕上;当屏幕有灰尘需要清洁时,应用柔软的纸巾或棉布轻轻擦除。
系统保修说明保修期:非人为损坏,主板保修1年。
液晶屏保修6个月,面膜按键(属于易耗品)保修期为3个月。
以下情况不在保修范围内:任何违反使用要求的人为故障或意外故障;带电插拔系统联接插座而造成的损坏;自然灾害等原因导致的损坏;未经许可,擅自拆卸、改装、修理等行为造成的损坏。
控制系统功能改变或完善(升级),恕不另行通知。
2.概述本公司最新研制的“运动控制器”,驱动装置采用细分步进电机或交流伺服电机,配备液晶显示器,全封闭触摸式操作键盘。
该系统具有可靠性高,精度高,噪音小,操作方便等特点。
本控制器可控制单个步进或伺服电机运动,可实现点位、直线的操作。
具有计数器、循环跳转(分绝对和条件)、子程序、变量等功能。
支持中文、文字指令。
简单、清晰的参数给您的操作带来方便和快捷。
一条指令有一到三个功能。
系统组成数控系统主要由以下几部分组成:l 液晶显示器(分辨率:192×64)l 专用运动控制芯片(信号输出为:5V TTL)l 输入/输出(10路光电隔离24V输入,16路光电隔离24V输出)l 用户加工程序存储器(单轴40个程序,两轴28个程序)l 单轴程序行数80行l 两轴程序行数70行l 薄膜按键阵列(28键)2.3 技术指标l 最小数据单位0.001mml 最大数据尺寸±9999.999mml快速点位运动限速2400mm/min (脉冲当量为0.001毫米时)l 最高加工速度限速2400mm/min (脉冲当量为0.001毫米时)l 单轴最高脉冲输出频率45KHzl 两轴最高脉冲输出频率30KHzl 控制轴数1/2轴l 电子齿轮分子:1-9999,分母:1-9999l 系统主要功能自动、手动、程序编辑、系统参数、自检、设置等 外观尺寸外形尺寸:长172,宽94,厚30嵌入孔尺寸:长162,宽84,前面板厚4开机画面客户可自己设计好开机画面,通过RS232下载到控制器上。
cp6203 使用手册
CP6203使用手册一、产品概述CP6203是一款高性能、易于使用的可编程运动控制器,适用于各种需要精确运动控制的应用场景,如机械加工、机器人、自动化生产线等。
它采用先进的运动控制算法,可以实现高精度的速度和位置控制,同时支持多种运动轴和电机驱动方式,具有高度的灵活性和可扩展性。
二、安装与连接1.安装:请根据CP6203的安装指南,将控制器安装在稳定的支撑面上,并确保通风良好。
2.连接:将电机驱动器和电机连接到控制器上,确保连接牢固。
同时,将传感器和其他外围设备连接到控制器的相应接口上。
三、主要功能与特点1.支持多种运动轴和电机驱动方式,如步进电机、伺服电机等。
2.支持多种控制模式,如点位控制、连续轨迹控制等。
3.高精度的速度和位置控制,保证运动的稳定性和准确性。
4.支持多种编程语言和开发环境,方便用户进行二次开发和定制。
5.丰富的输入输出接口,支持多种传感器和执行器。
6.支持在线编程和调试功能,方便用户进行现场调试和升级。
四、操作面板说明1.电源开关:控制器的电源开关,用于开启或关闭控制器。
2.LED指示灯:指示控制器的工作状态和报警信息。
3.按键:用于选择不同的操作模式和控制运动轴的运动状态。
4.显示屏幕:显示当前的运动状态和控制参数。
五、编程与设置1.编程语言:支持多种编程语言,如C、C++、VB等,方便用户进行二次开发和定制。
2.编程环境:提供友好的用户界面和开发环境,方便用户进行编程和调试。
3.参数设置:支持多种参数设置,如运动轴参数、控制模式参数等,方便用户进行个性化配置。
4.程序上传与下载:支持程序的上下载功能,方便用户进行程序的上传和调试。
六、故障排除与维护1.当控制器出现故障时,首先检查电源是否正常连接,保证电源电压符合要求。
2.检查电机驱动器和电机是否正常工作,排除因电机问题引起的故障。
3.检查传感器和其他外围设备是否正常工作,排除因外围设备问题引起的故障。
4.根据控制器的报警信息进行故障排除,如报警代码、报警提示等。
TC55H系列运动控制器
TC55H 系列运动控制系统(1-4轴)说明书北京多普康自动化技术有限公司扫一扫,加关注!掌握最新资讯,最新优惠!了解更多成功案例!咨询热线:4006-033-880官网:淘宝旗舰店:/阿里巴巴品牌工业城:/一、操作篇1.概述TC55H是北京多普康全新开发的新产品,可控制4个进给轴,1个模拟主轴,16路输入,8路输出,USB接口,支持U盘文件操作和程序运行,支持G代码编程。
1.1主要功能自动:自动加工运行,单段程序执行手动:手动高低速运行,手脉控制,当前选中轴程序回零,全部回程序零点,机械回零程序:编辑,读入,删除,另存,新建参数:控制参数,速度参数,输入参数,输出参数,厂值恢复USB:导入程序或开机图片密码:登陆用户,退出用户,修改密码外部手动:控制电机正反转,启动、暂停、报警、急停等程序指令:G指令和M指令隔离I/0口:带有与系统隔离的输入输出口模拟主轴输出:可接1路0~10V模拟主轴脉冲输出:4轴脉冲差分输出程序编辑:自动解释编辑指令1.2系统组成控制系统主要有以下部分组成● 3.5寸彩色液晶屏,分辨率320*240●触点按键阵列●4轴差分脉冲输出●输入/输出(16路光电隔离24V输入,8路光电隔离24V输出,单通道额定500mA)●1路模拟量主轴输出●1个面板型手轮,增量×1,×10,×100●1个USB接口,可插入U盘●最大程序行5000行,程序内存容量128M,可存100个加工程序1.3技术指标最小数据单位:0.001mm编程范围:±99999.999mm控制轴数:1~4轴(X,Y,Z,C)联动轴数:X,Y,Z,C轴可做直线插补,X,Y可做圆弧插补主轴数:1轴(S)各轴最大进给速度:9000mm/min(当脉冲当量为0.001mm时)插补:直线/圆弧电子齿轮:分子:1~99999,分母:1~999991.4尺寸z外形尺寸:长×宽×厚172×94×48mmz嵌入口尺寸:长×宽162×84mm,前面板厚4mm2.按键定义3.显示及操作方式3.1主界面系统上电后,跳过开机画面进入主界面,主界面显示坐标轴的位置,坐标的运行速度F及倍率,主轴的运行速度S及倍率,输入、输出口的状态。
GSN系列运动控制器用户手册说明书

GSN系列运动控制器用户手册R1.12019.03版权申明固高科技有限公司 保留所有权力固高科技有限公司(以下简称固高科技)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权力。
固高科技不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
固高科技具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
运动中的机器有危险!使用者有责任在机器中设计有效的出错处理和安全保护机制,固高科技没有义务或责任对由此造成的附带的或相应产生的损失负责。
联系我们固高科技(深圳)有限公司地 址:深圳市高新技术产业园南区深港产学研基地西座二楼W211室电 话:************* 26737236 26970824 传 真:*************电子邮件:********************** 网 址:固高科技(香港)有限公司地 址:香港九龍觀塘偉業街108號絲寶國際大廈10樓1008-09室電 話:+(852) 2358-1033 傳 真:+(852) 2719-8399 電子郵件:******************* 網 址:臺灣固高科技股份有限公司地 址:台中室西屯區台中港路三段97號7樓之3 電 話:+886-4-23588245 傳 真:+886-4-23586495電子郵件:***********************文档版本前言感谢选用固高运动控制器为回报客户,我们将以品质一流的运动控制器、完善的售后服务、高效的技术支持,帮助您建立自己的控制系统。
固高产品的更多信息固高科技的网址是。
在我们的网页上可以得到更多关于公司和产品的信息,包括:公司简介、产品介绍、技术支持、产品最新发布等等。
您也可以通过电话(0755-26970817)咨询关于公司和产品的更多信息。
技术支持和售后服务您可以通过以下途径获得我们的技术支持和售后服务:电子邮件:**********************;电话:0755-26970843发函至:深圳市高新技术产业园南区园深港产学研基地西座二楼W211室固高科技(深圳)有限公司邮编:518057用户手册的用途用户通过阅读本手册,能够了解GSN系列运动控制器的基本结构,正确安装运动控制器,连接控制器与电机控制系统,完成运动控制系统的基本调试。
HMC616 运动控制器硬件手册说明书

HMC616运动控制器硬件手册Version1.1版权说明本手册版权归深圳市浩川自动化技术有限公司所有,未经浩川自动化公司书面许可,任何人不得翻印、翻译和抄袭本手册中的任何内容。
涉及HMC控制器软件的详细资料以及每个指令的介绍和例程,请参阅VBASIC软件手册。
本手册中的信息资料仅供参考。
由于改进设计和功能等原因,浩川自动化公司保留对本资料的最终解释权!内容如有更改,恕不另行通知!调试机器要注意安全!请务必在机器中设计有效的安全保护装置,并在软件中加入出错处理程序,否则所造成的损失,浩川自动化公司没有义务或责任对此负责。
目录HMC616运动控制器硬件手册 (1)第一章控制器简介 (1)1.1连接配置 (1)1.2安装和编程 (2)1.3产品特点 (2)第二章硬件描述 (3)2.1HMC616系列型号规格 (3)2.1.1订货信息: (3)2.2HMC616接线 (4)2.2.1电源接口: (5)2.2.2通讯接口: (5)2.2.3RS232接口: (6)2.2.4通用输入信号: (7)2.2.5通用输出: (8)2.2.6ADDA信号 (9)2.2.7U盘接口信号: (9)2.2.8轴接口信号: (9)第三章扩展模块 (12)第四章常见问题 (12)第五章硬件安装 (13)5.1HMC616安装 (13)第一章控制器简介HMC是浩川自动化推出的独立式运动控制器型号简称。
HMC616系列控制器支持最多达24轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等;采用优化的网络通讯协议可以实现实时的运动控制。
单个电脑最多支持达256个HMC控制器同时链接。
1.1连接配置典型连接配置图HMC运动控制器支持以太网,USB,CAN,485等通讯接口,通过CAN总结可以连接各个扩展模块,从而扩展输入输出点数或运动轴(CAN总线两端需要并接120欧姆的电阻)。
HMC运动控制器支持U盘保存或读取数据(30x系列除外)。
欣灵 CAM 运动专用控制器 用户手册说明书

欣灵电气股份有限公司CAM运动专用控制器用户手册版本号V1.1欣灵电气股份有限公司目录CAM电子凸轮 (1)1.功能概述 (2)1-1.追剪概述 (2)1-2.追剪机械环境要求 (4)1-3.飞剪概述 (4)1-4.飞剪机械环境要求 (5)1-5.自定义凸轮概述 (6)2.指令应用 (7)2-1.指令软件应用简介 (7)2-2.凸轮绑定[CAMFUN] (10)2-3.凸轮初始化[CAMRST] (11)2-4.凸轮原点抓取[CAMORG] (12)2-5.色标抓取[CAMGET] (13)2-6.凸轮测速[CAMSPD] (14)2-7.凸轮虚拟速度[CAMVIR] (15)2-8.运动控制库[CAMLIB] (16)3.系统配置 (16)3-1.S1参数配置表(凸轮参数) (16)3-2.S0参数配置表(凸轮标志位) (21)4.应用与案例 (23)4-1.追剪应用与调试 (23)4-2.飞剪应用与调试 (24)4-3.追剪飞剪案例解析 (25)4-4.自定义凸轮应用 (30)4-6.自定义函数曲线应用 (32)5.注意事项 (35)6.常见问题 (36)附录 (39)附录1:凸轮状态及报警信息 (39)附录2:高速计数配置 (40)附录3:脉冲配置 (40)附录4:中断入口地址分配 (41)附录5:寄存器容量范围 (41)CAM电子凸轮本手册主要介绍CAM系列可编程专用控制器的电子凸轮控制功能,内容主要包括追剪、飞剪指令用法、自定义凸轮使用、指令参数配置以及相关线圈和寄存器等。
电子凸轮在包装印刷、连续生产等有着较为广泛的应用,其中飞剪和追剪是其中应用较为广泛的两种电子凸轮,针对追剪飞剪应用,CAM专用指令方便快速构建完成项目。
1.功能概述2.指令介绍3.系统配置4.应用与案例5.注意事项6.常见问题附录送料编码器压辊追剪裁切模组主传动近限位原点远限位追剪伺服在包装印刷行业中,需要在运动过程中实现多轴联动、实时相对同步等功能,CAM 系列PLC 具有追剪、飞剪功能以及自定义电子凸轮功能,通过简单配置相应寄存器和调用电子凸轮功能块可以快速构建追剪、飞剪以及复杂电子凸轮项目应用。
面板型运动控制器说明书
面板型运动控制器使用说明书一、概述篇 (3)二、连接篇 (5)三、操作篇 (7)1.自动执行 (11)1.1实际运行 (11)1.2空运行 (11)1.3单步执行 (12)1.4终止程序 (12)2手动操作 (13)2.1手动高速 (13)2.2点动操作 (14)2.3回程序零 (14)2.4回机械零 (14)3程序管理 (16)3.1程序编辑 (16)3.2程序读入 (18)3.3程序删除 (19)3.4程序保存 (20)4参数设置 (20)4.2系统自检 (23)4.3 IO设置 (26)4.4用户管理 (28)四、编程篇 (30)五、附录篇 (52)一、概述篇面板型运动控制器(数控系统)采用高性能32位CPU,驱动装置采用细分步进电机或交流伺服电机,配备液晶显示器,全封闭触摸式操作键盘。
该系统具有可靠性高,精度高,噪音小,操作方便等特点。
本控制器可控制1-3个电机运动,可实现点位、直线插补、圆弧插补等操作。
具有循环、跳转及简易PLC 等功能。
简单、清晰的参数带给您方便和快捷的操作。
输入/输出的设置功能可方便您的使用和维修,适用于各类的1-3轴运动装置。
产品特点开机画面可自行修改控制器或上位计算机双模式编程独立24V电源反接保护 IO光耦隔离输出短接保护手动正反转可同步外部开关控制简易PLC逻辑参数区密码可设定适用产品类型●数控钻床系统、数控车床系统、数控铣床系统、数控磨床系统●裁剪机控制系统、切割机控制系统、焊接控制系统、点胶机控制系统、送料控制系统●位移台、一维控制平台、二维控制平台、三维控制平台●螺纹机控制系统、锁螺丝机控制系统●喷涂生产线控制系统、装配生产线控制系统、记米器控制系统技术特点●自动执行:可实现实际运行、空运行、单段执行、终止程序、启动和暂停功能●手动操作:可实现手动高、低速、点动操作、回程序零、回机械零等操作。
●程序管理:可实现对程序进行编辑、读入、删除、保存功能。
●参数设置:可设置与加工、操作有关的各个控制参数,使加工效果达到最佳状态。
威世 2805 4 象限 pwm 运动控制器 用户手册说明书

4-Quadrant PWMFor combination with:Brushless DC-ServomotorsMotion ControllerGeneral information 1) Can be changed over the RS232 port (factory setting: command velocity is analog).2)Preset value. Can be changed over the RS232 port.Note: The Motion Controller is supplied with detailed operating instruction manual for easy installation and start-up.The MCBL 2805 was designed for Faulhaber brushless DC-Servomotors with linear hall sensors. This means that, even without an external encoder, low speed and positioning with a resolution up to 1/1000th of a revolution is possible. The motion controller is based on a power-ful 16-Bit micro controller with excellent fi ltering quality. Maximum Power:Velocity Control: High performance speed synchronization andthe lowest possible torque variance even in the most demanding of applications. A PI-controller makes sure that the command position is accurately achieved. Velocity Profi les: Ramping, triangular, trapezoidal, and more complex combined motion profi les are available to the user.Positioning Mode: Positioning with high resolution including limit switches and zero referencing.Additional Modes: For example, Stepper Motor Mode, to synchro-nize multiple motors.Torque Controlling: Achieved through current limiting. Saving and Running Program Sequences: For stand-alonep ositioning applications and to relieve the host PC.Modern Technology in Miniature Format:High effi ciency Amplifi er with high range PWM frequencies Power MOSFETS with low input resistanceUnique temperature supervision of the power MOSFETS Powerful 16-bit micro controller RS232 InterfaceOn-board memory (EEPROM)Inputs and Outputs:Command Value Input: For inputing command speed values in digital or analog form. This input can also interpret a reference mark signal. Depending on the mode, a frequency signal or an incremental encoder can be connected at this input.Fault Output (Open Collector): This output can also be programmed as a direction of rotation input, a digital input, or a reference mark input. RS232 Interface: For connecting a host PC and controlling program sequences.An additional digital input.The inputs are suitable for controlling program sequences.Specifi cations subject to change without notice1628 T 012 B K11551628 T 024 B K11552036 U 024 B K11552444 S 024 B K11553056 K 012 B K11553056 K 024 B K11553564 K 024 B K1155OptionsFaulhaber offers the optional Multiplexer Board to operate mul-tiple motion controllers from one host PC.To accomodate the customers specialized needs we offer factory preconfi guring of modes and parameters to fi t the application. The Faulhaber Motion Manager is available for download from the internet at or upon request.Adapters for IE2 – xx Encoders allow for simple attatchment to mounting railings.Ordering informationThis Motion Controller is exclusively d esigned for the control of the following motors and can be ordered with motor or on its own.K1155 indicates motor with linear Hall sensors for implementation with MCBL 2805.Note: the no-load speed is approx. 20% lower when used in combination with the MCBL 2805.ProgrammingA complete ASCII command set is available for programming and operating the motion controllers. All that is necessary is a terminal program such as the ‘hyperterminal’ provided with the Windows operating system. The Faulhaber Motion Manager program is available for users of Windows 95/98/ME and NT, 2000, XP . This program makes confi guration and operation easy and allows the user to perform an online graphic analysis of the performance of the drive.Additional Modes Stepper Motor Mode Gearing ModeAnalog Voltage Positioning Mode External EncoderVoltage Regulator ModeSpecifi cations subject to change without notice。
XC606单轴步进电机控制器说明书V2.1

⑸在当前行按【插入】键,本行会显示『暂停指令』,按【上移】和【下移】键可以选
择用户需要的指令,输入参数后,按【确认】,就完成了本条指令的编辑。
⑹当用户完成所有的指令编写后,可以按【上页】和【下页】键,浏览用户任务的每一
行。
⑺按【ESC】键,可以退出『任务编写』,返回上一级。
用户指令如下表所示:
序 号
公参共数参名称数如下表所参示数:范围
手动增量 1-999999
脉冲方式 单脉冲 或者 双脉冲 起跳频率 60-50000 升降曲线 0-9 手动速度 60-50000 回零速度 60-50000
V2.1
功能描述 手动左移或者右移时每次所走的量,单位可以是长 度在(手动mm模)式,,圈如,果度短,按脉【冲左。移】或【右移】键就运 行本参数设定的量,如果长按【左移】或【右移】 键,按下去时运行,抬起来时停止。 脉冲方式要与驱动器保持一致,默认为单脉冲 电机启动时的频率,当设定的升降曲线的时间较长 时起跳频率应设低,反之则设高点。在电机可正常 运行的情况下低点较好。 曲长线,曲0 线的升0-降9 依速次时加间长最。短,曲线 9 的升降速时间最 此处以显示方式为脉冲作例子。 此处以显示方式为脉冲作例子。
V2.1
5
功能描述 在每个用户任务开始编写之前请先确 定是以何种单位显示。默认为脉冲。 如果用户选择的显示方式是圈,度,或 者长度(mm),用户任务开始编写之前 请先根据实际情况输入本参数,否则用 户所设定的速度,和位移量是不对的。 如果用户选择的显示方式是长度 (mm),用户任务开始编写之前请先根 据实际情况输入本参数,否则用户所设 定的速度,和位移量是不对的。 程控:电机根据用户编写的任务中的指 令执行; 直控:按键抬起来停止,按下运行,可 设定步数,当设定步数走完后,即使按 键没抬起,仍然会停止,当步数没走完 抬起来也停止。当步数设为 0 时,一直 执行按下运行,抬起停止。 直控按键为外部按键时,接在左键和右
运动控制器

发展趋势
发展趋势
由于下游机械设备厂商对运动控制器的强劲需求,中国通用运动控制器(GMC)市场容量预计会在2014年达 到10.65亿美金,而CNC运动控制器市场规模将会达到12.39亿美金。
专家认为:机床,纺织机械,橡塑机械,印刷机械和包装机械行业约占中国运动控制市场销售额的80%以上, 现在和将来都会是运动控制器的主要市场。而食品饮料机械,烟草机械,医疗设备和科研设备行业对运动控制器 的需求由于和人民生活紧密相关,这些终端消费一直处于稳定增长中,所以这一类机械行业对运动控制器的需求 是稳定增长的。
电气运动控制是由电机拖动发展而来的,电力拖动或电气传动是以电动机为对象的控制系统的通称。运动控 制系统多种多样,但从基本结构上看,一个典型的现代运动控制系统的硬件主要由上位机、运动控制器、功率驱 动装置、电动机、执行机构和传感器反馈检测装置等部分组成。其中的运动控制器是指以中央逻辑控制单元为核 心、以传感器为信号敏感元件、以电机或动力装置和执行单元为控制对象的一种控制装置。
虽然电子和半导体机械设备行业在2008年底受到了一些冲击,但运动控制器在电子和半导体机械中的应用一 直在增长,2009年和2010年由于对电子制造业的庞大资金投入和终端消费的拉动,运动控制器在电子和半导体机 械设备中的销售强劲反弹。中国作为全世界最重要的电子制造业基地之一,电子制造,电子组装和半导体设备的 需求和产量都稳定增长,这些产业在相当长的时间内都不会大规模转移到其他成本更低的国家,所以今后几年运 动控制器在电子和半导体机械设备行业的销售还会保持较快增长。
基于PC总线的以DSP和FPGA作为核心处理器
基于PC总线的以DSP和FPGA作为核心处理器的开放式运动控制器,这类运动控制器以DSP芯片作为运动控制 器的核心处理器,以PC机作为信息处理平台,运动控制器以插卡形式嵌入PC机,即“PC+运动控制器”的模式。
简易单轴运动控制器使用说明书

简易单轴运动控制器使用说明书该款简易单轴运动控制器SAMC(Simple Axis Motion Controller)不需编程,提供多种运动方式:单向单次、往返单次、单向连续、往返连续,自动回原点等,参数设置合理简单,工作中实时显示位置状态,适用于单轴步进电机的各种场合控制应用,如自动送料、自动冲床、自动剪板机、器件编带、商标印刷、切标机、切带机、化妆品封尾等。
一、性能指标:1.输出脉冲频率:20KHz。
2.位置最大设置值999900脉冲。
3.速度最小设置值100Hz、加速度最小设置值100Hz/s。
二、电气特性:1.工作电源:DC24V。
2.输入检测口:5V开关信号(IO1\IO2\IO3\IO4,TTL电平)。
3.输出控制口:P+、P-、D+、D-、E+、E-都是差分输出,当用作单端时,可利用Vcc(+5V)与P+、D+、E+配合使用。
三、使用操作说明控制器底端有六个按键,分别是MODE、SET、SHIFT、UP、RUN、STOP分别表示模式、设定、移位、上加、运行、停止。
控制器通电(24V)以后,数码管全部显示零。
1.位移设定按下MODE键,则显示1,表示位移设定模式,如需进入该模式,则按下SET键,此时百位闪烁(位移、速度、加速度的设置值规定都是100的整数倍,所以位移、速度、加速度都是从百位开始设置),每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT 键,则千位开始闪烁,同样方法完成各位设置。
当位移值设定好以后,则再次按下SET键,此时设定的位移值成功被CPU读取。
位移初始默认值是40000。
2.最大速度设定再次按下MODE键,则显示2,表示最大速度设定模式,最大速度表示位移进给过程中最大进给速度,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。
当最大速度设定好以后,则再次按下SET键,此时设定的最大速度成功被CPU读取。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动控制器说明
控制器平面图:
硬件说明:
1、控制器采用DSP+FPGA双核方案,实现高速高精度控制;
2、丰富的IO口:通用DI 24路+每个轴2路DI,共32路DI输入。
通用DO 16路+每个轴
2路DO,共24路DO输出;
3、支持4路5V AB正交脉冲输入,输入频率最大支持4M;
4、支持1路24V AB正交脉冲输入,输入频率最大支持500K;
5、支持4路高速AB脉冲输出,输出频率可达4M;
6、内置5V电压,为外部5V编码器提供电源;
7、支持RS485-RTU通讯;
8、电源指示灯、运行指示灯、告警指示灯和通讯指示灯;
9、预留硬件:RS232接口、Can总线接口和2路±10V模拟量输入。
软件说明:
1、支持DI、DO通过相应寄存器来选择功能,功能分配目前是根据客户非标定制,不支持
客户自定义,支持常开或者常闭选择;
2、脉冲接收模式支持:脉冲+方向;CW+CCW;AB相正交脉冲;
3、脉冲输出支持AB脉冲正交5V差分输出,频率可限制;
4、支持客户定制非标功能开发:飞剪功能、追剪功能、对位功能等运动控制功能;
5、支持自动化行业非标功能定制和成套解决方案。
控制器中的电子齿轮和电子凸轮可以大大地简化机械设计,而且可以实现许多机械齿轮与凸轮难以实现的功能。
电子齿轮可以实现多个运动轴按设定的齿轮比同步运动,这使得运动控制器在定长剪切和无轴转动的套色印刷方面有很好地应用。
另外,电子齿轮功能还可以实现一个运动轴以设定的齿轮比跟随一个函数,而这个函数由其他的几个运动轴的运动决定;一个轴也可以以设定的比例跟随其他两个轴的合成速度。
电子凸轮功能可以通过编程改变凸轮形状,无需修磨机械凸轮,极大简化了加工工艺。
这个功能使运动控制器在机械凸轮的淬火加工、异型玻璃切割和全电机驱动弹簧等领域有良好的应用。
控制器适用领域:
控制器可以运用于印刷包装设备行业、新型机床行业、电子半导体设备行业、机器人行业、纺织服装设备行业、医疗器械设备行业等行业中。
控制器接线说明:
Axis轴接线引脚定义:
1 -------------------------------- EGND
2 -------------------------------- DIR+(输出5V差分)
3 -------------------------------- GND
4 -------------------------------- PULSE+(输出5V差分)
5 -------------------------------- 5V
6 -------------------------------- EZ+(输入5V差分)
7 -------------------------------- EB+(输入5V差分)
8 -------------------------------- EA+(输入5V差分)
9 -------------------------------- FGND
10 -------------------------------- E24V
11 -------------------------------- 保留
12 -------------------------------- DIR-(输出5V差分)
13 -------------------------------- PULSE-(输出5V差分)
14 -------------------------------- 保留
15 -------------------------------- 保留
16 -------------------------------- EZ-(输入5V差分)
17 -------------------------------- EB-(输入5V差分)
18 -------------------------------- EA-(输入5V差分)
19 -------------------------------- EGND
20 -------------------------------- 保留
21 -------------------------------- 保留
22 -------------------------------- 保留
23 -------------------------------- DO0
24 -------------------------------- DO1
25 -------------------------------- DI0
26 -------------------------------- DI1
控制器脉冲输入:
控制器DI输入:。