系统与控制中的矩阵理论(2)(1)
矩阵不等式理论及其在控制理论中的应用
矩阵不等式理论及其在控制理论中的应用矩阵不等式理论是现代数学中的一个重要分支,其在控制理论领域中扮演着重要角色。
本文将介绍矩阵不等式理论的基本概念,讨论其在控制理论中的应用,并探讨相关研究的前沿发展。
一、矩阵不等式理论的基本概念1.1 矩阵基础知识在讨论矩阵不等式理论之前,我们首先需要了解一些矩阵的基础知识。
矩阵是由一些数构成的矩形阵列,可以表示为$m\times n$的矩阵$A$:$A=[a_{ij}]_{m\times n}$,其中$a_{ij}$表示第$i$行第$j$列元素。
1.2 矩阵不等式定义矩阵不等式是对矩阵中元素的一种约束条件。
常见的矩阵不等式有大于等于不等式、小于等于不等式、严格大于不等式和严格小于不等式。
比如对于两个矩阵$A$和$B$,$A\geq B$表示对应元素满足$a_{ij}\geq b_{ij}$。
二、矩阵不等式理论在控制理论中的应用2.1 线性矩阵不等式线性矩阵不等式是矩阵不等式理论的重要应用之一。
在控制理论中,通过线性矩阵不等式可以描述线性系统的性能和稳定性。
线性矩阵不等式的求解可以通过线性矩阵不等式方法或凸优化方法来实现。
2.2 非线性矩阵不等式除了线性矩阵不等式,非线性矩阵不等式也在控制理论中起到关键作用。
非线性矩阵不等式可以描述非线性系统的性能和稳定性。
然而,非线性矩阵不等式的求解相较于线性矩阵不等式更加复杂,需要运用数值计算和最优化等方法。
2.3 随机矩阵不等式随机矩阵不等式是指矩阵不等式中包含随机变量的情况。
在控制理论中,随机矩阵不等式可用于描述带有随机干扰的系统的性能和鲁棒稳定性问题。
随机矩阵不等式的求解方法包括最优化方法和随机矩阵计算方法。
三、矩阵不等式理论的前沿发展矩阵不等式理论在控制理论中的应用仍在不断发展。
近年来,针对矩阵不等式理论的研究趋势主要体现在以下几个方面:3.1 非线性矩阵不等式的求解算法改进由于非线性矩阵不等式的求解复杂度较高,需要运用数值计算和最优化等方法。
矩阵理论在控制系统中的应用 - 济南大学

矩阵理论在控制系统中的应用崔士军学院:控制学院 专业:控制理论与控制工程 学号:2009010201摘要:本文主要介绍矩阵理论在控制领域中的应用,主要介绍了连续时间线性时不变系统零输入响应运动分析,即给定线性定常系统的自治方程,如何利用数学模型,求解线性定常系统的零输入响应问题。
是矩阵理论中约当标准形和对角线标准形在线性系统理论中的一个很典型的应用。
一.问题的提出:为了定量地和精确地确定出控制系统运动的变化规律,以便为系统的实际运动过程作出估计。
需要从其数学模型出发,分析系统运动过程和状态。
1. 线性系统状态方程:从数学的角度上,就是相对于给定的初绐状态x0和外输入u ,来求解方程(1)和(2)的解,即系统响应。
解的存在性和唯一条件如果系统A(t)、B(t)的所有元在时间定义区间[ ]上均为 t 的实值连续函数,而输入u(t)的元在时间定义区间[ ]上是连续实函数,则其状态方程的解x(t)存在且唯一。
2. 连续时间线性时不变系统零输入响应运动分析给定线性定常系统的自治方程:并称其为矩阵指数函数。
[])2(0)0(:)1()()()(:0000≥=+=∈=+=t x x Bu A t t t x t x u t B t A x x x x 时不变时变ααt t ,0αt t ,0k k k k At tA t A At I e n n n n A n x t x x A ∑∞==+++=⨯⨯≥==0!122!21,0,)1(0)0( 的矩阵函数定义常阵为维状态向量为其中x x由(1)所描述的线性定常系统的零输入响应的表达式为:3. 解的含义:(1)如果将 t 取为某个固定值,那么零输入响应 , 即为状态空间中由初始状态 经线性变换 所导出的一个变换点。
因此系统的自由运动就是由初态出发,并由 的各时刻的变换点所组成的一条轨迹。
(2)自由运动轨迹的形态,即零输入响应形态,是由矩阵指数函数 所唯一地决定。
矩阵函数在控制理论中的应用-09李学慧

矩阵函数在控制理论中的应用—连续时间线性时不变系统状态观测器设计李学慧(学院:控制科学与工程 专业:检测技术与自动化装置 学号:2009010190)摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用。
随着科技的发展,自动控制理论跨入了一个新的阶段——现代控制理论。
它主要研究具有高性能、高精度的多变量变参数系统的最优控制问题,而研究多变量系统的主要工具是矩阵理论。
因此,矩阵理论及其矩阵函数理论在现代控制理论中有着广泛而重要的应用。
现代控制理论设计反馈控制系统采用状态反馈.因此,可以说现代控制理论的基础是状态反馈问题。
状态变量的选取和确定是至关重要的。
设计位置控制系统时,通常选取负荷的位置()y t 作为状态1()x k 、速度()y t 作为状态2()x k ,因为负荷的位置容易测量,检测元件的造价较低。
而对于测速系统来说,检测元件的成本是很高的。
对于有些复杂系统,往往无法直接观测相应的状态。
在控制对象的状态无法观测,或者观测状态所需的测量元件造价过高时,利用控制对象的输入和输出间接地推定相应的状态变量,称为状态观测器。
预备知识一 定义:设有线性定常系统0(,,)A B C ∑=的状态x 是不能直接量测的,若存在另一个动态系统g ∑,满足如下条件:(1)g ∑以0∑的输出y 和输入u 作为输入量;(2)g ∑的输出ˆ()t x满足 ˆlim[()()]0(1)t t t →∞-=x xˆ()t x为g ∑的状态,则称g ∑是0∑的状态观测器。
二 构造观测器的一般原则:(1)观测器g ∑必须以原受控系统0∑的输出y 和输入u 作为输入。
(2)为使观测器g ∑满足(1)式,则要求原受控系统0∑是状态完全能观的,或其不能观部分是渐近稳定的。
(3)观测器的输出ˆ()t x 应有足够快的逼近的()t x 的速度,因此要求应有足够的频带。
(4)观测器g ∑应有较好的抗干扰性。
(5)观测器g ∑的结构应尽可能简单,即g ∑的维数应尽可能低。
天津大学《矩阵论与控制系统分析》2020年考研专业课复试大纲

课程名称:矩阵论与控制系统分析
一、适用范围
本复试大纲适用于申请报考"控制科学与工程"学科,初试考数学卷的各专业考生的复试笔试。
二、考试的内容及比例
要求学生掌握矩阵论的基本理论,控制系统的数学模型,线性系统的时域分析法,并能进行应用。
(1)线性空间及其子空间、线性变换。
(2)矩阵的Jordan 标准形,多项式矩阵及其初等变换,Smith 标准形及不变因子。
(3)向量与矩阵的范数,几种常用的向量范数与矩阵范数,矩阵的谱半径及其性质。
(4)哈密尔顿-凯莱定理,最小多项式及其性质。
(5)自动控制系统的一般概念,控制系统微分方程的建立与求解,脉冲响应与阶跃响应,控制系统的传递函数,控制系统的结构图。
(6)系统时间响应的性能指标,一阶系统与二阶系统时域分析,线性系统的稳定性分析(劳斯与赫尔维茨稳定判据)与稳态性能分析、稳态误差计算。
考试内容比例为"矩阵论"与"控制系统分析"约各占50%。
三、试卷题型与比例
概念题:20%;简答及分析题:40%;设计与计算题40%。
矩阵论在控制系统中的应用 高等代数解决方案

矩阵论在控制系统中的应用高等代数解决方案矩阵论作为高等代数的重要分支,广泛应用于各个领域,其中包括控制系统。
控制系统是一种以矩阵为基础的数学模型,通过使用矩阵论中的相关方法和技巧可以解决控制系统的设计与分析问题。
本文将探讨矩阵论在控制系统中的应用,并提供相关的高等代数解决方案。
控制系统是用于操控和管理一定范围内的实体或者过程的系统,常见的控制系统包括自动驾驶系统、机器人控制系统、工业自动化控制系统等。
这些控制系统通常由传感器、执行器、控制器以及相关的算法和软件组成,通过对输入信号的采集和处理,控制系统能够实现对输出信号的准确控制。
而矩阵论在控制系统中的应用则是通过研究和分析矩阵间的关系和性质来实现对控制系统的优化和改进。
首先,矩阵论在控制系统中的应用之一是状态空间分析。
状态空间是一种表示系统动态行为的数学模型,通过将系统的状态和输入输出关系用矩阵形式表示,可以方便地进行系统的分析和控制。
在状态空间分析中,我们可以使用矩阵的特征值和特征向量来确定系统的稳定性和响应特性。
例如,可以利用矩阵特征值的实部判断系统是否稳定,并通过特征向量来描述系统的响应模式。
此外,状态空间模型中的状态转移矩阵和控制矩阵也可以通过矩阵运算和特征分解得到,从而对系统进行参数优化和控制器设计。
其次,矩阵论在控制系统中的应用之二是线性时不变系统的传递函数描述。
线性时不变系统是一种常见的控制系统模型,通过输入信号和系统的传递函数之间的关系,可以得到输出信号的解析表达式。
在传递函数描述中,矩阵的乘法和逆运算经常用于传递函数的推导和计算。
例如,在求解系统的零点和极点时,可以将传递函数表示成分子多项式和分母多项式的比值形式,进而使用矩阵的特征值和特征向量来求解系统的零点和极点。
此外,矩阵的行列式和行列式的性质也常常用于传递函数的稳定性判断和振荡特性分析。
最后,矩阵论在控制系统中的应用之三是多变量系统的分析和设计。
当控制系统中存在多个输入和多个输出时,需要使用多变量控制技术来实现对系统的精确控制。
控制论常用的矩阵不等式

控制论常用的矩阵不等式控制论是一门研究如何通过控制手段来实现系统稳定、优化和鲁棒性的学科,而矩阵不等式则是控制论中常用的数学工具之一。
本文将介绍控制论中常用的几种矩阵不等式,并讨论其在控制系统设计中的应用。
1. 线性矩阵不等式(LMI)线性矩阵不等式是控制论中最常用的矩阵不等式之一。
它的形式为:$$A(x)X+B(x)Y+C^{T}(x)YC(x)<0$$其中,$A(x)$、$B(x)$、$C(x)$均为实系数矩阵函数,$X$、$Y$均为矩阵变量。
该不等式表示的是矩阵函数$A(x)$、$B(x)$、$C(x)$构成的线性系统对应的闭环系统是渐进稳定的,即对任意的初值$x_0$,系统的输出$y(t)$都会收敛到零。
2. Lyapunov矩阵不等式Lyapunov矩阵不等式是控制论中另一种常用的矩阵不等式。
它的形式为:$$A^{T}P+PA<-Q$$其中,$A$为系统的状态转移矩阵,$P$为对称正定矩阵,$Q$为对称正定矩阵。
该不等式表示的是系统的Lyapunov函数$V(x)=x^{T}Px$满足$V(x)leqslant-alpha x^{T}x$,其中$alpha$是正常数。
3. Riccati矩阵不等式Riccati矩阵不等式也是控制论中常用的矩阵不等式之一。
它的形式为:$$A^{T}P+PA-PBR^{-1}B^{T}P<-Q$$其中,$A$、$B$为系统的状态转移矩阵和输入矩阵,$P$为对称正定矩阵,$R$为对称正定矩阵。
该不等式表示的是系统的最优控制输入满足线性方程$u=-R^{-1}B^{T}Px$。
4. Schur矩阵不等式Schur矩阵不等式是控制论中最基本的矩阵不等式之一。
它的形式为:$$Mprec N$$其中,$M$、$N$为两个对称矩阵,$prec$表示矩阵的部分序。
该不等式表示的是矩阵$N-M$是正定的。
总之,矩阵不等式在控制论中具有广泛的应用,可以用于系统稳定性分析、最优控制设计和鲁棒性分析等领域。
现代控制理论+2-3+系统的传递函数矩阵 (1)

解:
(sΙ − A )
−1
-1
G (s ) = C(sI − A ) B + D
1 1 0 s = 0 1 0
s s −1 = = 0 s + 2 0
s (s + 2 ) 1 s+2
1 1 s (s + 2 ) 1 0 = s 1 0 1 0 s+2
求传递函数矩阵 的表达式
A = [0 1; 0 -2]; B = [1 0; 0 1]; C= [1 0; 0 1]; D = 0; sys = ss(A,B,C,D) tf (sys)
返回
Transfer function from input 1 to output... 1 #1: s #2: 0 Transfer function from input 2 to output... 1 #1: --------s^2 + 2 s 1 ----s+2
1 0 1 x1 1 0 u1 x = + , x 2 0 − 2 x2 0 1 u2
1 s G (s ) = 0 1 s (s + 2 ) 1 s+2
y1 1 0 x1 y = 0 1 x 2 2
前页
一、定义及表达式
零初始条件下,输出向量的拉氏变换式与输入向量 的拉氏变换式之间的传递关系——传递函数矩阵。
(t ) = Ax(t ) + Bu(t ) ⇒ sX(s ) = AX(s ) + BU(s ) x y (t ) = Cx(t ) + Du(t ) ⇒ Y(s ) = CX(s ) + DU(s )
管理学原理复习题目(有答案)
管理学原理复习题目(有答案)《管理学原理》复习参考题第一部分选择题一、单项选择题(在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在题后的括号内。
)1.在组织的五个基本要素中,管理的媒介是( )A人与物B.信息C.机构D.目的2.在组织的内部要素中,表明为什么要有这个组织的要素是( )A.人与物B.信息C.机构D.目的3.管理的主体是( ) A.管理者B.组织C.人D.管理机构4.美国管理学家彼德·德鲁克认为,管理者的第—个责任是( )A.管理管理者B.管理一个组织C.管理工作和工人D.从事管理活动5.管理过程中的首要职能是( ) A. 人员配备B.组织C.计划D.指导与控制'6.管理的核心是A建立组织机构B.协调人力物力C.协调入际关系D.尽力减少支出7.管理是一种艺术,是强调管理的A.精确性B.延续性C.随意性D.实践性8. 马克思主义关于管理问题的基本观点是( )A.辩证唯物主义观点B.管理二重性观点C. 系统的观点D.发展的观点9.管理学原理区别于专门管理学的特点在于( ) A.历史性B.科学性C.一般性D.实践性10.管理学属于边缘性学科,这说明管理学的特点是( )A.一般性B.多样性C.实践性D.历史性11.管理是一种A.经济现象B.自然现象C.社会文化现象D.科学现象12.一般说来,组织的外部要素是A可以控制的B无法控制的C.部分可控的D.无法判断!13.管理学应属于( )。
A.社会科学B.边缘科学C.经济学D.自然科学14.管理的五大基本职能是( )。
A.计划、组织、协调、领导、控制B.计划、组织、人员配备、指导与领导、控制C. 计划、组织、协调、人员配备、控制D.计划、组织、人员配备、领导、控制15.管理学形成的标志是( )A.泰罗科学管理理论B法约尔管理过程理论C韦伯理想行政组织理D梅奥的霍桑实验结论16.管理产生的萌芽阶段时间是( )A.19世纪末20世纪初B.18世纪到19世纪末C.6000年以前D.本世纪30年代17.在管理理论萌阶段,论述企业所有权和管理权问题的经济学家是A.亚当·斯密B.马基雅维利C.塞缪尔·纽曼D.亨利·普尔:18.点燃美国“管理运动”火花的是A.泰罗B. 斯隆C.亨利·唐纳D.亨利·普尔19.美国出现的管理运动的主要组成部分是( )A.科学管理B.管理科学C.霍桑实验D.行为科学20.泰罗由于对管理理论的卓绝贡献而被后人称为( )A.过程理论鼻祖B.组织理论之父C.科学管理之父D.行为科学创始人21.科学管理理论的中心问题是A作业标准化B计件工资制C职能工长制D提高劳动生产率22.法约尔的代表著作是A《科学管理原理》B《国富论》C《工业管理和一般管理》D《君主论》23.马克斯·韦伯认为宜于作为理想组织体系的基础的权力是( )A.理性——合法权力B.超凡的权力C.传统的权力D.继承的权力@24.企业中存在着“非正式组织”的观点来源于( )A.现代管理理论B.管理过程理论C.科学管理理论D.霍桑试验结论25.现代管理科学主要是服务于( A.控制B.预测C.决策D.技术26.法约尔提出的原则有( )。
矩阵理论在机械控制系统中的应用实践
矩阵理论在机械控制系统中的应用实践导言机械控制系统是现代工业生产中不可或缺的重要组成部分,其最终目的是通过对机械设备的控制,实现预定的运动轨迹和操作效果。
而在机械控制系统的设计与实践中,矩阵理论起到了重要的作用。
本文将探讨矩阵理论在机械控制系统中的具体应用实践,并展示了矩阵理论在提高机械控制系统性能和效率方面的显著优势。
一、矩阵理论的基本概念矩阵理论是现代线性代数中的重要分支,它主要研究各种类型的矩阵及其相应的运算规则。
在机械控制系统中,我们通常将各种运动参数抽象成二维矩阵的形式,并利用矩阵运算来实现对机械设备的控制。
下面我们将介绍几个常用的矩阵概念和运算规则。
1.1 矩阵表示在机械控制系统中,我们通常将机械设备的各种运动参数表示为一个矩阵。
例如,对于一个三自由度机械臂,我们可以将其位置、速度和加速度分别表示为三个矩阵,即位置矩阵、速度矩阵和加速度矩阵。
1.2 矩阵运算在机械控制系统中,我们通常通过矩阵运算来实现对机械设备的精确控制。
例如,通过对位置矩阵和速度矩阵进行加减乘除等运算,可以实现对机械设备的位置和速度控制;通过对加速度矩阵进行微分和积分运算,可以实现对机械设备的加速度和力矩控制。
二、矩阵理论在机械控制系统中的应用实践在机械控制系统的设计与实践中,矩阵理论被广泛应用,并取得了显著的成果。
下面我们将介绍几个矩阵理论在机械控制系统中的具体应用实践。
2.1 轨迹规划在机械控制系统中,轨迹规划是一个重要的研究方向。
通过对机械设备的位置、速度和加速度进行矩阵运算,可以实现对机械设备运动轨迹的精确规划。
例如,对于一个经典的工业机械臂,可以通过对其位置矩阵和速度矩阵进行矩阵乘法运算,从而得到实现指定轨迹运动所需的驱动信号。
2.2 摆动控制在某些机械控制系统中,需要对机械设备进行精确的摆动控制。
通过对机械设备的位置、速度和加速度进行矩阵运算,可以实现对机械设备摆动参数的精确控制。
例如,对于一个振动台,可以通过对其位置矩阵和速度矩阵进行矩阵加减运算,从而实现对振动频率和振幅的精确控制。
(精校版)矩阵在自动控制中的应用+
完整word版,矩阵在自动控制中的应用+编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(完整word版,矩阵在自动控制中的应用+)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为完整word版,矩阵在自动控制中的应用+的全部内容。
矩阵理论在控制中的应用吴祥 矩阵5班 201022070738摘要:本文就控制中的常见问题进行了讨论,并应用矩阵,对控制中的一些问题进行描述,运用矩阵的线性变换对控制理论中一些问题的求解进行了简化。
关键字:状态空间、对角标准型、约当标准型 1、引言20世纪60年代,随着计算机技术的进步,航空航天技术和综合自动化的发展需要,推动了以状态空间为基础,最优控制为核心,主要在时域研究多输入多输出系统的现代控制理论的诞生。
经典控制理论是以系统的输入输出为研究依据,其基本数学模型为线性定常高阶微分方程、传递函数。
对线性定常离散系统,其数学模型为线性定常高阶微分方程、脉冲传递函数。
这些模型仅仅描述系统输入、输出之间的外部特性,不能揭示系统的内部物理状态量的运动规律.若要揭示系统内部特性,就引入了状态空间。
2、用矩阵来建立状态空间假设单输入、单输出线性定常n 阶连续系统,n 个状态变量为1x ,2x ……。
n x .其状态方程的一般形式为:'111112211'221122222'1122.............................n n n n n n n nn n n x a x a x a x b u x a x a x a x b u x a x a x a x b u=++++=++++=++++输出方程为1122......n n n y c x c x c x b u =++++其向量—矩阵法方程形式的状态空间表达式为:'11111121'21222222'12....................n n n n nn n n nx x b a a a a a a x x b u a a a x x b ⎡⎤⎡⎤⎡⎤⎛⎫⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎢⎥ ⎪=+⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎢⎥⎢⎥ ⎪⎝⎭⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦1212[.....]..n n x x y c c c Du x ⎡⎤⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦简单记为:'x Ax Bu =+ (1-1) y Cx Du =+ (1—2)其中1—1和1-2叫做状态空间.1—1式叫做状态方程,1-2式叫做输 出方程。
矩阵理论在控制系统稳定性分析中的应用

矩阵理论在控制系统稳定性分析中的应用【摘要】在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,随着科技的发展,自动控制理论跨入了一个全新的阶段——现代控制理论,它主要研究具有高性能、高精度的多变量变参数系统的最优控制问题,而研究多变量系统的主要工具是矩阵理论。
因此,矩阵理论及其矩阵函数理论在现代控制理论中有着广泛而重要的应用。
本文主要介绍了矩阵理论在控制系统稳定性分析中的应用,重点讨论了两种李亚普诺夫方法。
【关键词】线性定常系统;非线性定常系统;矩阵函数;矩阵理论;雅可比矩阵1.引言一个自动控制系统要能正常工作,必须是一个稳定的系统。
例如,电压自动调节系统中保持点击电压为恒定的能力;电机自动调速系统中保持电机转速为一定的能力以及火箭飞行中保持航向为一定的能力等。
稳定性的定义为:当系统受到外界干扰后,显然它的平衡被破坏,但在外扰消失以后,它仍有能力自动地在平衡态下继续工作。
一个动态系统的稳定性,通常指系统的平衡状态是否稳定。
简单地说,是指系统在扰动消失后,由初始偏差状态恢复到原平衡状态的性能,它是系统的一个自身动态属性。
如果一个系统不具有上述特性,则称为不稳定系统。
稳定性和能控性、能观测性一样,均是系统的结构性质。
稳定性是子弹控制系统能否正常工作的先决条件,因此判别系统的稳定性及如何改善其稳定性是系统分析和综合的首要问题。
1892年,俄国学者李亚普诺夫在他的博士论文“运动稳定性的一般问题”中借助平衡状态稳定与否的特征对系统或系统运动稳定性给出了严格定义,提出了解决稳定性问题的一般理论,即李亚普诺夫稳定性理论。
该理论基于系统的状态空间描述法,是对单变量、多变量、线性、非线性、定常、时变系统稳定性分析皆适用的通用方法,是现代稳定性理论的重要基础和现代控制理论的重要组成部分。
基于输入-输出描述法描述的是系统的外部特性,因此,经典控制理论中的稳定性一般指输出(外部)稳定性;状态空间描述法不仅描述了系统的外部特性,且全面揭示了系统的内部特性,因此,借助平衡状态稳定与否的特征所研究的系统稳定性指状态(内部)稳定性。
矩阵理论在信号系统中的应用
五邑大学研究生矩阵理论论文矩阵理论在信号系统中的应用摘要:在20世纪50年代蓬勃兴起的航天技术的推动下,现代控制理论在上世纪60年代开始形成并得到了迅速的发展。
现代控制理论的重要标志和基础就是状态空间方法。
现代控制理论用状态空间法描述输入、状态、输出等各种变量间的因果关系。
不但反映系统输入与输出的外部特性,而且揭示了系统内部的结果特性,可以研究更复杂而优良的控制算法。
现代控制理论及使用于单变量控制系统,有适用于多变量控制系统,既可以用于线性定常系统,又可以用于线性时变系统,还可用于复杂的非线性系统。
本文主要介绍了连续时间线性时不变系统零输入响应运动分析,如何利用数学模型,求解线性定常系统的零输入响应问题。
是矩阵理论中约当标准形和对角线标准形在线性系统理论中的一个很典型的应用。
状态与状态变量:系统在时间域中运动信息的集合称为状态。
确定系统状态的一组独立(数目最少的)变量称为状态变量。
它是能完整地确定地描述系统的时间行为的最少的一组变量。
状态向量:如果n 个状态变量用()1x t 、()2x t 、…()n x t 表示,并把这些状态变量看做是向量X (t )的分量,则向量X (t )称为状态向量,记为()()()()12n x t x t X t x t ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦或者()()()()12T n X t x t x t x t =⎡⎤⎣⎦状态空间:以状态变量()1x t 、()2x t 、…()n x t 为坐标轴构成的n 维空间。
状态方程:描述系统的状态变量之间及其和系统输入量之间关系的一阶微分方程组线性系统:满足叠加原理的系统具有线性特性零输入响应:若输入的激励信号为零,仅有储能元件的初始储能所激发的响应,称为零输入响应。
一、线性系统状态方程:A :表示系统内部状态关系的系数矩阵B :表示输入对状态作用的输入矩阵从数学的角度上,就是相对于给定的初绐状态x0和外输入u (t ),来求解状态方程的解,即系统响应。
控制论中的矩阵运算及其应用

控制论中的矩阵运算及其应用当我们谈到控制论时,很多人会感到困惑,可能是因为控制论的应用范围非常广泛,而我们在平时的生活中并没有直接接触过。
控制论是指在包含各种自然科学和社会科学研究的一个学科体系,它不仅仅是一个科学,它还是一个哲学,是一个人工智能的基础。
其中,矩阵运算是控制论中的基础工具之一,接下来,我们着重探讨控制论中的矩阵运算及其应用。
一、矩阵的定义及性质在控制论中,矩阵是关键的工具之一。
矩阵可以定义为一个表格,其中的元素可以是数字、符号或函数。
一个$ m × n$的矩阵由$m$行和$n$列构成,通常记作$A_{m×n}$,其中$A_{i,j}$表示在第$i$行和第$j$列的元素。
例如,下面是一个$ 2×3$的矩阵:$$\begin{bmatrix} 1& 2& 3\\ 4& 5& 6 \end{bmatrix}$$矩阵的迹是指对角线上的元素之和,它可以用Tr($A$)表示。
对于一个$n×n$的矩阵$A$,如果对于每个$i=1,2,…,n$,$A_{i,j}=A_{j,i}$,那么它就是一个对称矩阵。
如果一个矩阵$A$的元素全为0,那么它就是一个零矩阵,一般记作$0_{m×n}$。
矩阵的加法和减法是按照相同位置的元素相加或相减。
例如,对于两个$ m × n $的矩阵$A$和$B$,它们的加法$A+B$可以表示为:$$(A+B)_{i,j} = A_{i,j}+B_{i,j}$$矩阵还可以进行常数乘法,即将一个常数$k$与矩阵的每个元素相乘。
例如,对于一个$m × n$的矩阵$A$和一个常数$k$,它们的乘积$ kA$可以表示为:$$kA_{i,j} = k \cdot A_{i,j}$$二、矩阵乘积的定义和性质在控制论中,矩阵乘积是非常重要的一种运算,它可以表示多个线性变换的复合运算。
对于两个矩阵$A_{m × n}$和$B_{n × p}$,它们的乘积$C_{m × p}$定义为:$$ C_{i,j} = \sum ^{n}_{k=1} A_{i,k}B_{k,j} $$例如,对于两个矩阵:$$ A = \begin{bmatrix} 1& 2\\ 3& 4 \end{bmatrix}, \quad B = \begin{bmatrix} 3& 4\\ 5&6 \end{bmatrix} $$它们的乘积$AB$可以表示为:$$ AB = \begin{bmatrix} 1& 2\\ 3& 4 \end{bmatrix} \begin {bmatrix} 3& 4\\ 5&6 \end{bmatrix} = \begin {bmatrix}23&34\\ 53&70 \end{bmatrix}$$矩阵乘积还有很多重要的性质。
现代控制理论课件传递函数矩阵的实现完整版

ΣAi ,Bi ,Ci ,则Gs的实现为:
清华大学 现代控制理论 课件 (自动化系 石宗英)
31/54
11.3 传递函数矩阵的实现
A1 0
0
B1 0
0
A
0
A2
0
,
B
0
B2
0
0
0
Al
0
0
Bl
C C1 C2
Cl
该实现的维数为
l
n ri r l
i 1
例:p.291 例9.10.3
0
0
1
i
,
Bi
0 1
cimi 2 ci1
清华大学 现代控制理论 课件 (自动化系 石宗英)
21/54
11.2 标量传递函数的实现
则Gs的实现ΣA,B,C 为:
A1 0 0
B1
A
0
A2
0
,
B
B2
0 0 Ar
Br
C C1 C2 Cr
清华大学 现代控制理论 课件 (自动化系 石宗英)
A4
0
0
B3 B4
C
C1 0
0 C2
C3 0
0 C4
清华大学 现代控制理论 课件 (自动化系 石宗英)
26/54
11.3 传递函数矩阵的实现
对所求得的实现ΣA,B,C 进行可控性可观性 结构分解,可得到Gs的最小实现,即ΣA,B,C 的可控且可观部分ΣAco ,Bco ,Cco 。
清华大学 现代控制理论 课件 (自动化系 石宗英)
A~B~
A~ n1B~
清华大学 现代控制理论 课件 (自动化系 石宗英)
9/54
矩阵控制原理
矩阵控制原理
矩阵控制原理是一种控制系统设计方法,它利用矩阵运算来描述和分析系统的动态行为。
通过矩阵控制原理,可以将复杂的系统分解为多个子系统,并将其表示为矩阵方程。
在矩阵控制原理中,常用的矩阵包括状态矩阵、输入矩阵和输出矩阵。
状态矩阵描述系统的状态变量,输入矩阵表示控制输入的加权关系,输出矩阵定义系统的输出与状态变量之间的关系。
通过对状态矩阵、输入矩阵和输出矩阵进行运算,可以得到系统的传递函数。
传递函数可以用于分析系统的稳定性、响应特性以及设计控制器等方面。
基于矩阵控制原理,可以设计多种控制器,例如比例控制器、积分控制器、微分控制器以及PID控制器等。
这些控制器可以通过调节权重矩阵的数值来改变系统的响应特性。
矩阵控制原理在现代控制系统中得到了广泛的应用。
它可以用于控制电力系统、机械系统、化工系统、自动化系统等各种工程领域。
通过运用矩阵控制原理,可以实现系统的稳定性、精确性和鲁棒性,提高系统的性能和可靠性。
总之,矩阵控制原理是一种重要的控制系统设计方法,它通过矩阵运算来描述和分析系统的动态行为,为控制系统的设计和优化提供了有效的工具和方法。
《现代控制理论》习题册
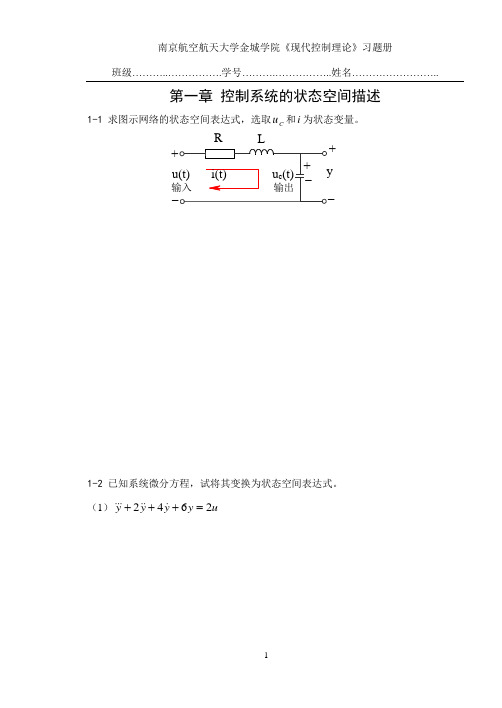
第一章 控制系统的状态空间描述1-1 求图示网络的状态空间表达式,选取C u 和i 为状态变量。
RL +1-2 已知系统微分方程,试将其变换为状态空间表达式。
(1)u y y y y 2642=+++(2)u u y yy 237+=++(3)u u u y y yy 23745++=+++(4)u u u u y y y y 81786116+++=+++1-3试画出如图所示系统的状态变量图,并建立其状态空间表达式。
1-4 已知系统的传递函数,试建立其状态空间表达式,并画出状态变量图。
(1)61161)(232+++++=s s s s s s G (2)6513)(22++++=s s s s s G(3))3()1(4)(2++=s s s s G (4)13332)(232+++++=s s s s s s G1-5 已知系统233)()(2+++=s s s s U s Y ,试求其能控标准型和对角标准型。
1-6 已知系统传递函数,试用并联法求其状态空间表达式。
(1)61161)(23+++=s s s s G (2)2545)(23+++=s s s s G1-7 试求下列状态方程所定义系统的传递函数。
⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21212121211001101142510x x y y u u x x x x1-8 试将下列状态方程化为对角标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=106510(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=1751326712203010(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=01161161000101-9 试将下列状态方程化为约当标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=102112(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=357213*********(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=100452100010第二章 线性控制系统状态空间表达式的解2-1 试求下列系统矩阵A 对应的状态转移矩阵。
协作控制中常用的矩阵理论
∀d
n
ij
xj, 从
该方程可以看出, 每一个单元均接收来自自身的 负反馈, 该项可以保证系统的渐近稳定性质 ; 而 来自其他单元的正反馈项则反映了智能体之间的 相互作用和影响。特别地 , 若 D 为不可约矩阵, 则整个协作系统中的多个智能体彼此之间可以互 相传递信息, 从而协同合作完成任务。
Abstract: Mat rix t heory in cooperat ive cont rol is summ ar ized and analyzed in t his paper in a de t ailed w ay. And non negat ive mat rix theory is applied in t he st abilit y analysis of a kind of cooper at ive syst em t hrough and ex ample. Key words: coo perative cont rol; non neg at ive m atr ix ; Met zler m atrix 近年来, 多智能体协作控制( 通过对系统施加 控制作用使多个实体协同合作, 最终实现共同的 目标 ) 在诸如军事作战系统、 航空运输系统等领域 极其广泛的应用引发了多个研究学科关于协作控 制的研究关注。而在协作控制的理论研究中 , 矩 阵理论扮演着非常重要的作用, 本文对协作控制 中常用的矩阵及其相关性质进行了分析和总结。 1 协作控制中常用的矩阵 1 1 非负矩阵 1. 1. 1 非负矩阵的定义及其可约 / 不可约性质 若一个矩阵 A = ( aij ) m n 的所有元素均大于 等于 0 , 则称 A 为非负矩阵。特别地, 如 果 A = ( aij ) m n 的所有元素都大于 0 , 则称 A 为正矩阵。 对于非负方阵 A , 如果存在一个置换矩阵 P, 使得 F 11 0 T P A P= , 其中 F 11 , F 22 均 为方阵 , 则 * F 22 称 A 为可约矩阵; 否则为不可约矩阵。对于可约 T 矩阵 A , 一定存在整数 p 及置换矩阵 P , 使 P A P E 11 E 21 0 E 22 0 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020年8月6日5时53分
北京科技大学自动化学院自动化系
8
§1 向量范数
内积空间和酉空间:通过内积定义了向量的长度。 线性空间有“长度”?---->“范数”
若V 是实内积空间,x, y V为任意向量,a 为实数域 R 中任一 元素,则V 中向量的长度具有下列三个基本性质:
证明:(1)当 x 时,则 1,2, ,n 不全为零,从而
n
x 1
i 0;
i 1
(2) 对于任何 a C ,则Biblioteka nnax 1
ai
a
i
a
x; 1
i 1
i 1
(3) 若 y 1,2, ,n Cn 为任意向量,则
n
n
x y 1
i i
( i
i )
x 1
y
1
i 1
i 1
即三角不等式成立。
常见的向量范数
对于酉空间向量 x 1,2, ,n Cn
1-范数 2-范数 ∞-范数
n
x 1
i
i 1
n
x 2
i 2
i 1
p-范数
x
max
1in
i
1
x
p
n i1
i
p p
(1 p )
2020年8月6日5时53分
北京科技大学自动化学院自动化系
11
常见的向量范数
n
1-范数
x 1
i
i 1
2020年8月6日5时53分
北京科技大学自动化学院自动化系
12
常见的向量范数
1-范数: p=1
2-范数: p=2
∞-范数:
x lim p
x
p
max 1in
i
证明:当 x 时,显然成立。故只需对非零向量加以证明。
Discrete- event systems
Hybrid systems
2020年8月6日5时53分
北京科技大学自动化学院自动化系
4
系统与控制中的矩阵理论
Linear systems (T. Kailath) 特征值与特征向量,矩阵对角化,矩阵求逆,矩阵函数, 多项式矩阵,史密斯标准型,子空间, …
Second generation: Digital Control
Technology: Digital computers Theory: State-space design,Kalman filtering,Optimal control,H∞
Third generation: Networked control
Technology: Embedded computers, Wireless and wireline networks, Software
Theory: Multi-agent, Consensus, flocking, cooperative, …
2020年8月6日5时53分
北京科技大学自动化学院自动化系
6
课程内容 1/4
Introduction to linear matrix inequalities (LMIs) System stability and performance
➢ Lyapunov stability ➢ Dissipativity ➢ KYP lemma ➢ Bounded real lemma ➢ Positive real lemma
3
系统与控制中的矩阵理论
Second generation: Digital Control
Linear systems
√
Nonlinear systems
Optimal control
Estimation
System identification
Robust control
√
Adaptive control √
北京科技大学自动化学院自动化系
5
课程内容 1/4
向量范数,矩阵范数 向量和矩阵的极限 矩阵幂级数 矩阵函数 矩阵的微分与积分 常用矩阵函数的性质 矩阵函数的应用一:微分方程 矩阵函数的应用二:线性系统的能控性与能观性
(《矩阵分析引论》第四章,罗家洪 华南理工大学)
2020年8月6日5时53分
北京科技大学自动化学院自动化系
➢ H∞
➢ H2
2020年8月6日5时53分
北京科技大学自动化学院自动化系
7
课程内容 1/4
Some useful lemmas
➢ Schur complement ➢ Dualization lemma ➢ Projection lemma ➢ Elimilation lemma
State-feedback control Dynamic output-feedback control
(1) 当 x 时,都有| x | 0;
(2) | ax|| a | | x | ; (3) | x y|| x | | y|。
2020年8月6日5时53分
北京科技大学自动化学院自动化系
9
向量范数
定义1:(向量范数)
设 V是数域 P 上的线性空间。若对于V 中的任一向量x ,都有 一非负实数 x 与之对应,并且满足下列三个条件:
Adaptive control (P. A. Ioannou) 向量及矩阵范数,矩阵不等式,矩阵方程,矩阵函数,正 定矩阵,矩阵对角化, …
Robust control (K. Zhou) 子空间,特征值及特征向量,矩阵求逆,广义逆,矩阵微 积分,矩阵范数,奇异值分解,LMI,…
2020年8月6日5时53分
(1) 正定性:当x 时,都有 x 0;
(2) 齐次性: 对于任何 a P,有 ax a x ; (3) 三角不等式:对于任何 x, y V,都有
xy x y 则称非负实数 x 为向量 x 的范数。简言之,向量的范数是定
义在线性空间上的非负实值函数。
2020年8月6日5时53分
北京科技大学自动化学院自动化系
系统与控制中的矩阵理论
自动化系 丁大伟
ustb_automation@
2020年8月6日5时53分
北京科技大学自动化学院自动化系
1
研究范围
系统理论 控制理论
矩阵理论
本课程内容 =系统与控制 矩阵
控制理论的发展阶段
First generation: Analog Control
Technology: Feedback amplifiers Theory: Frequency domain analysis—Bode, Nyquist, Evans, …