linux驱动程序编写基础(精选)
linux驱动开发(一)

linux驱动开发(⼀)1:驱动开发环境要进⾏linux驱动开发我们⾸先要有linux内核的源码树,并且这个linux内核的源码树要和开发板中的内核源码树要⼀直;⽐如说我们开发板中⽤的是linux kernel内核版本为2.6.35.7,在我们ubuntu虚拟机上必须要有同样版本的源码树,我们再编译好驱动的的时候,使⽤modinfo XXX命令会打印出⼀个版本号,这个版本号是与使⽤的源码树版本有关,如果开发板中源码树中版本与modinfo的版本信息不⼀致使⽆法安装驱动的;我们开发板必须设置好nfs挂载;这些在根⽂件系统⼀章有详细的介绍;2:开发驱动常⽤的⼏个命令lsmod :list moduel 把我们机器上所有的驱动打印出来,insmod:安装驱动rmmod:删除驱动modinfo:打印驱动信息3:写linux驱动⽂件和裸机程序有很⼤的不同,虽然都是操作硬件设备,但是由于写裸机程序的时候是我们直接写代码操作硬件设备,这只有⼀个层次;⽽我们写驱动程序⾸先要让linux内核通过⼀定的接⼝对接,并且要在linux内核注册,应⽤程序还要通过内核跟应⽤程序的接⼝相关api来对接;4:驱动的编译模式是固定的,以后编译驱动的就是就按照这个模式来套即可,下⾯我们来分下⼀下驱动的编译规则:#ubuntu的内核源码树,如果要编译在ubuntu中安装的模块就打开这2个#KERN_VER = $(shell uname -r)#KERN_DIR = /lib/modules/$(KERN_VER)/build# 开发板的linux内核的源码树⽬录KERN_DIR = /root/driver/kernelobj-m += module_test.oall:make -C $(KERN_DIR) M=`pwd` modulescp:cp *.ko /root/porting_x210/rootfs/rootfs/driver_test.PHONY: cleanclean:make -C $(KERN_DIR) M=`pwd` modules cleanmake -C $(KERN_DIR) M=`PWD` modules这句话代码的作⽤就是到 KERN_DIR这个⽂件夹中 make modules把当前⽬录赋值给M,M作为参数传到主⽬录的Makefile中,实际上是主⽬录的makefile中有⽬标modules,下⾯有⼀定的规则来编译驱动;#KERN_VER = $(shell uname -r)#KERN_DIR = /lib/modules/$(KERN_VER)/build我们在ubuntu中编译内核的时候⽤这两句代码,因为在ubuntu中为我们保留了⼀份linux内核的源码树,我们编译的时候直接调⽤那个源码树的主Makefile以及⼀些头⽂件、内核函数等;了解规则以后,我们设置好KERN_DIR、obj-m这两个变量以后直接make就可以了;经过编译会得到下⾯⼀些⽂件:下⾯我们可以使⽤lsmod命令来看⼀下我们ubuntu机器现有的⼀些驱动可以看到有很多的驱动,下⾯我们使⽤insmod XXX命令来安装驱动,在使⽤lsmod命令看⼀下实验现象可以看到我们刚才安装的驱动放在了第⼀个位置;使⽤modinfo来打印⼀下驱动信息modinfo xxx.ko这⾥注意vermagic 这个的1.8.0-41是你⽤的linux内核源码树的版本号,只有这个编译的版本号与运⾏的linux内核版本⼀致的时候,驱动程序才会被安装注意license:GPL linux内核开元项⽬的许可证⼀般都是GPL这⾥尽量设置为GPL,否则有些情况下会出现错误;下⾯使⽤rmmod xxx删除驱动;-------------------------------------------------------------------------------------5:下⾯我们分析⼀下驱动。
Linux驱动之USB鼠标驱动编写
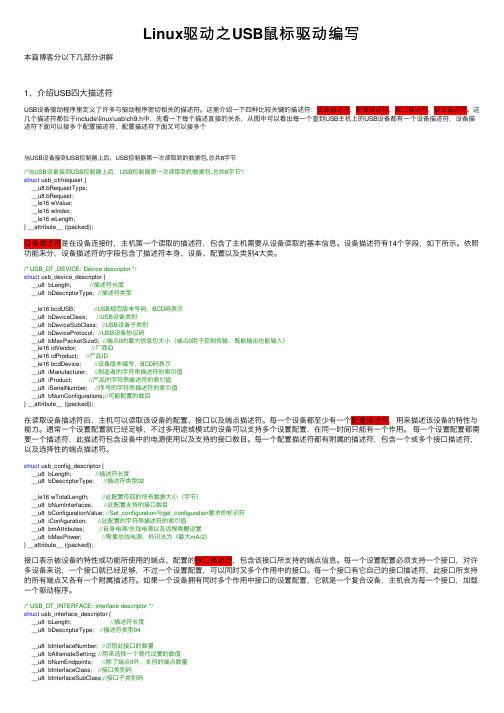
Linux驱动之USB⿏标驱动编写本篇博客分以下⼏部分讲解1、介绍USB四⼤描述符USB设备驱动程序⾥定义了许多与驱动程序密切相关的描述符。
这⾥介绍⼀下四种⽐较关键的描述符:设备描述符、配置描述符、接⼝描述符、端点描述符。
这⼏个描述符都位于include\linux\usb\ch9.h中,先看⼀下每个描述直接的关系,从图中可以看出每⼀个查到USB主机上的USB设备都有⼀个设备描述符,设备描述符下⾯可以接多个配置描述符,配置描述符下⾯⼜可以接多个当USB设备接到USB控制器上后,USB控制器第⼀次读取到的数据包,总共8字节/*当USB设备接到USB控制器上后,USB控制器第⼀次读取到的数据包,总共8字节*/struct usb_ctrlrequest {__u8 bRequestType;__u8 bRequest;__le16 wValue;__le16 wIndex;__le16 wLength;} __attribute__ ((packed));设备描述符是在设备连接时,主机第⼀个读取的描述符,包含了主机需要从设备读取的基本信息。
设备描述符有14个字段,如下所⽰。
依照功能来分,设备描述符的字段包含了描述符本⾝、设备、配置以及类别4⼤类。
/* USB_DT_DEVICE: Device descriptor */struct usb_device_descriptor {__u8 bLength; //描述符长度__u8 bDescriptorType; //描述符类型__le16 bcdUSB; //USB规范版本号码,BCD码表⽰__u8 bDeviceClass; //USB设备类别__u8 bDeviceSubClass; //USB设备⼦类别__u8 bDeviceProtocol; //USB设备协议码__u8 bMaxPacketSize0; //端点0的最⼤信息包⼤⼩(端点0⽤于控制传输,既能输出也能输⼊)__le16 idVendor; //⼚商ID__le16 idProduct; //产品ID__le16 bcdDevice; //设备版本编号,BCD码表⽰__u8 iManufacturer; //制造者的字符串描述符的索引值__u8 iProduct; //产品的字符串描述符的索引值__u8 iSerialNumber; //序号的字符串描述符的索引值__u8 bNumConfigurations;//可能配置的数⽬} __attribute__ ((packed));在读取设备描述符后,主机可以读取该设备的配置、接⼝以及端点描述符。
一、如何编写LinuxPCI驱动程序
⼀、如何编写LinuxPCI驱动程序PCI的世界是⼴阔的,充满了(⼤部分令⼈不快的)惊喜。
由于每个CPU体系结构实现不同的芯⽚集,并且PCI设备有不同的需求(“特性”),因此Linux内核中的PCI⽀持并不像⼈们希望的那么简单。
这篇简短的⽂章介绍⽤于PCI设备驱动程序的Linux APIs。
1.1 PCI驱动程序结构PCI驱动程序通过pci_register_driver()在系统中"发现"PCI设备。
事实上,恰恰相反。
当PCI通⽤代码发现⼀个新设备时,具有匹配“描述”的驱动程序将被通知。
详情如下。
pci_register_driver()将设备的⼤部分探测留给PCI层,并⽀持在线插⼊/删除设备[因此在单个驱动程序中⽀持热插拔PCI、CardBus和Express-Card]。
pci_register_driver()调⽤需要传⼊⼀个函数指针表,从⽽指⽰驱动程序的更⾼⼀级结构体。
⼀旦驱动程序知道了⼀个PCI设备并获得了所有权,驱动程序通常需要执⾏以下初始化:启⽤设备请求MMIO / IOP资源设置DMA掩码⼤⼩(⽤于⼀致性DMA和流式DMA)分配和初始化共享控制数据(pci_allocate_coherent())访问设备配置空间(如果需要)注册IRQ处理程序(request_irq())初始化non-PCI(即LAN/SCSI/等芯⽚部分)启⽤DMA /处理引擎当使⽤设备完成时,可能需要卸载模块,驱动程序需要采取以下步骤:禁⽌设备产⽣irq释放IRQ (free_irq())停⽌所有DMA活动释放DMA缓冲区(包括流式DMA和⼀致性DMA)从其他⼦系统注销(例如scsi或netdev)释放MMIO / IOP资源禁⽤该设备下⾯⼏节将介绍这些主题中的⼤部分。
其余部分请查看LDD3或<linux/pci.h>。
如果PCI⼦系统没有配置(没有设置CONFIG_PCI),下⾯描述的⼤多数PCI函数都被定义为内联函数,要么完全空,要么只是返回⼀个适当的错误代码,以避免在驱动程序中出现⼤量ifdefs。
Linux视频设备驱动编程(v4l2编程)
Linux视频设备驱动编程(v4l2编程)一.什么是video4linuxVideo4linux2(简称V4L2),是linux中关于视频设备的内核驱动。
在Linux 中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头在/dev/video0下。
二、一般操作流程(视频设备):1. 打开设备文件。
int fd=open(”/dev/video0″,O_RDWR);2. 取得设备的capability,看看设备具有什么功能,比如是否具有视频输入,或者音频输入输出等。
VIDIOC_QUERYCAP,struct v4l2_capability3. 选择视频输入,一个视频设备可以有多个视频输入。
VIDIOC_S_INPUT,struct v4l2_input4. 设置视频的制式和帧格式,制式包括PAL,NTSC,帧的格式个包括宽度和高度等。
VIDIOC_S_STD,VIDIOC_S_FMT,struct v4l2_std_id,struct v4l2_format5. 向驱动申请帧缓冲,一般不超过5个。
struct v4l2_requestbuffers6. 将申请到的帧缓冲映射到用户空间,这样就可以直接操作采集到的帧了,而不必去复制。
mmap7. 将申请到的帧缓冲全部入队列,以便存放采集到的数据.VIDIOC_QBUF,struct v4l2_buffer8. 开始视频的采集。
VIDIOC_STREAMON9. 出队列以取得已采集数据的帧缓冲,取得原始采集数据。
VIDIOC_DQBUF10. 将缓冲重新入队列尾,这样可以循环采集。
VIDIOC_QBUF11. 停止视频的采集。
VIDIOC_STREAMOFF12. 关闭视频设备。
close(fd);三、常用的结构体(参见/usr/include/linux/videodev2.h):struct v4l2_requestbuffers reqbufs;//向驱动申请帧缓冲的请求,里面包含申请的个数struct v4l2_capability cap;//这个设备的功能,比如是否是视频输入设备struct v4l2_input input; //视频输入struct v4l2_standard std;//视频的制式,比如PAL,NTSCstruct v4l2_format fmt;//帧的格式,比如宽度,高度等struct v4l2_buffer buf;//代表驱动中的一帧v4l2_std_id stdid;//视频制式,例如:V4L2_STD_PAL_Bstruct v4l2_queryctrl query;//查询的控制struct v4l2_control control;//具体控制的值下面具体说明开发流程(网上找的啦,也在学习么)打开视频设备在V4L2中,视频设备被看做一个文件。
linux驱动开发知识点总结

linux驱动开发知识点总结Linux驱动开发是指在Linux操作系统下开发和编写设备驱动程序的过程。
Linux作为一种开源操作系统,具有广泛的应用领域,因此对于驱动开发的需求也非常重要。
本文将从驱动程序的概念、驱动开发的基本步骤、常用的驱动类型以及驱动开发的注意事项等方面进行总结。
一、驱动程序的概念驱动程序是指控制计算机硬件和软件之间通信和交互的程序。
在Linux系统中,驱动程序负责与硬件设备进行交互,实现对硬件的控制和管理。
二、驱动开发的基本步骤1. 确定驱动的类型:驱动程序可以分为字符设备驱动、块设备驱动和网络设备驱动等。
根据具体的硬件设备类型和需求,选择合适的驱动类型。
2. 编写设备注册函数:设备注册函数用于向系统注册设备,使系统能够识别和管理该设备。
3. 实现设备的打开、关闭和读写操作:根据设备的具体功能和使用方式,编写设备的打开、关闭和读写操作函数。
4. 实现设备的中断处理:如果设备需要进行中断处理,可以编写中断处理函数来处理设备的中断请求。
5. 编写设备的控制函数:根据设备的需求,编写相应的控制函数来实现对设备的控制和配置。
6. 编译和安装驱动程序:将编写好的驱动程序进行编译,并将生成的驱动模块安装到系统中。
三、常用的驱动类型1. 字符设备驱动:用于控制字符设备,如串口、打印机等。
字符设备驱动以字符流的方式进行数据传输。
2. 块设备驱动:用于控制块设备,如硬盘、U盘等。
块设备驱动以块为单位进行数据传输。
3. 网络设备驱动:用于控制网络设备,如网卡。
网络设备驱动实现了数据包的收发和网络协议的处理。
4. 触摸屏驱动:用于控制触摸屏设备,实现触摸操作的识别和处理。
5. 显示驱动:用于控制显示设备,实现图像的显示和刷新。
四、驱动开发的注意事项1. 熟悉硬件设备的规格和寄存器的使用方法,了解硬件设备的工作原理。
2. 确保驱动程序的稳定性和可靠性,避免出现系统崩溃或死机等问题。
3. 对于需要频繁访问的设备,要考虑性能问题,尽量减少对硬件的访问次数。
如何编写Linux设备驱动程序

Ke wo d y rs: L n x S s e i u y t m;D v c r v r e i e D i e
0 引言
w i e c oe等。如何把系统调用和驱动 程序关联起来 , rt 、l s 这 需要 了解一个 非常关键的数 据结 构:i e o ea i n 。 f l— p r t o s 这个
—
样对硬件设备进行操作。设备驱动程序是 内核的一 部分 ,
①对设备初始化和释放 ;
它完成以下功 能: ②把数据传送到硬 件和从硬件读取数据 ; ④读 取应用程序传送给设备 文件的数据和 回送 应用程 序请求 的数据 ; ④检查和处理设备 出现 的错误。
2 实 例 剖 析
f l ’i ec a b f i tc u t ( ie f l ,hr u ,n o n )
关 键 词 :Ln x 作 系统 ; 备 驱 动 程 序 iu 操 设
中图分类号 :T 3 4 P1
文献标识码 : A
文章编号 : 6 1 49 一 20 )— 09 0 1 7 — 7 2 (088 09 — 2
Ab t c : T e o c p o i u d v c d i e s a i t o u e , a d h n h i t r a m c a i m a d h s r t h c n e t f L n x e i e r v r w s n r d c d a n t e t e n e n l e h n s s n t e
1 iu e i r e 的概 念 l xd vc di r n e v
结构的每一个成员的名字都对应着一个系统调用。 用户进程 利用系统调用在对设备 文件进行诸如 ra/rt edwie操作时, 系统调 用通过设备文件 的主设 备号找 到相应 的设备 驱动程
linux设备驱动程序的设计与实现

linux设备驱动程序的设计与实现
Linux设备驱动程序的设计与实现是一个涉及底层系统编程和硬件交互的复杂过程。
下面是一个简单的步骤指南,以帮助你开始设计和实现Linux设备驱动程序:
1. 了解硬件:首先,你需要熟悉你要驱动的硬件设备的规格和特性。
这包括硬件的内存空间、I/O端口、中断请求等。
2. 选择驱动程序模型:Linux支持多种设备驱动程序模型,包括字符设备、块设备、网络设备等。
根据你的硬件设备和需求,选择合适的驱动程序模型。
3. 编写Makefile:Makefile是一个文本文件,用于描述如何编译和链接你的设备驱动程序。
它告诉Linux内核构建系统如何找到并编译你的代码。
4. 编写设备驱动程序:在Linux内核源代码树中创建一个新的驱动程序模块,并编写相应的C代码。
这包括设备注册、初始化和卸载函数,以及支持读写和配置硬件的函数。
5. 测试和调试:编译你的设备驱动程序,并将其加载到运行中的Linux内核中。
使用各种测试工具和方法来验证驱动程序的正确性和稳定性。
6. 文档和发布:编写清晰的文档,描述你的设备驱动程序的用途、用法和已知问题。
发布你的代码以供其他人使
用和改进。
linux 开发新驱动步骤

linux 开发新驱动步骤Linux作为一款开源的操作系统,其内核源码也是开放的,因此,许多开发人员在Linux上进行驱动开发。
本文将介绍在Linux上进行新驱动开发的步骤。
第一步:确定驱动类型和接口在进行驱动开发前,需要确定驱动类型和接口。
驱动类型包括字符设备驱动、块设备驱动、网络设备驱动等。
接口包括设备文件、系统调用、ioctl等。
根据驱动类型和接口的不同,驱动开发的流程也有所不同。
第二步:了解Linux内核结构和API驱动开发需要熟悉Linux内核的结构和API。
Linux内核由许多模块组成,每个模块都有自己的功能。
API是应用程序接口,提供了许多函数和数据结构,开发人员可以使用这些函数和数据结构完成驱动开发。
第三步:编写驱动代码在了解了Linux内核结构和API后,就可以编写驱动代码了。
驱动代码需要按照Linux内核的编码规范编写,确保代码风格统一、可读性好、可维护性强等。
在编写代码时,需要使用API提供的函数和数据结构完成相应的功能。
第四步:编译驱动代码和内核模块驱动代码编写完成后,需要编译成内核模块。
编译内核模块需要使用内核源码中的Makefile文件。
编译完成后,会生成一个.ko文件,这个文件就是内核模块。
第五步:加载和卸载内核模块内核模块编译完成后,需要加载到Linux系统中。
可以使用insmod命令加载内核模块,使用rmmod命令卸载内核模块。
在加载和卸载内核模块时,需要注意依赖关系,确保依赖的模块已经加载或卸载。
第六步:调试和测试驱动开发完成后,需要进行调试和测试。
可以使用printk函数输出调试信息,在/var/log/messages文件中查看。
测试时需要模拟各种可能的情况,确保驱动程序的稳定性和可靠性。
Linux驱动开发需要掌握Linux内核结构和API,熟悉驱动类型和接口,按照编码规范编写驱动代码,并进行编译、加载、调试和测试。
只有掌握了这些技能,才能进行高效、稳定和可靠的驱动开发。
Linux设备驱动开发入门-Read
Linux设备驱动开发入门本文以快捷而简单的方式讲解如何像一个内核开发者那样开发linux设备驱动源作者: Xavier Calbet版权:GNU Free Documentation License 翻译: 顾宏军()中文版权:创作共用.署名-非商业用途-保持一致知识准备要开发Linux 设备驱动,需要掌握以下知识:•C 编程 需要掌握深入一些的C 语言知识,比如,指针的使用,位处理函数,等。
•微处理器编程 需要理解微机的内部工作原理:存贮器地址,中断,等。
这些内容对一个汇编程序员应该比较熟悉。
Linux 下有好几种不同的设备。
为简单起见,本文只涉及以模块形式加载的字符设备。
使用2.6.x 的内核。
(特别是Debian Sarge 使用的2.6.8内核。
)用户空间和内核空间当你开发设备驱动时,需要理解“用户空间”和内核空间之间的区别。
1:2:3:4:5:6:7:8:9:10:11:12:13:14:15:16:17:18:19:20:21:22:23:24:25:•内核空间 :Linux 操作系统,特别是它的内核,用一种简单而有效的方法管理机器的硬件,给用户提供一个简捷而统一的编程接口。
同样的,内核,特别是它的设备驱动程序,是连接最终用户/程序员和硬件的一坐桥或者说是接口。
任何子程序或者函数只要是内核的一部分(例如:模块,和设备驱动),那它也就是内核空间的一部分。
•用户空间. 最终用户的应用程序,像UNIX 的shell 或者其它的GUI 的程序(例如,gedit),都是用户空间的一部分。
很显然,这些应用程序需要和系统的硬件进行交互。
但是,他们不是直接进行,而是通过内核支持的函数进行。
它们的关系可以通过下图表示:图1: 应用程序驻留在用户空间, 模块和设备驱动驻留在内核空间26:27:28:29:30:31:32:33:34:35:36:37:38:39:40:用户空间和内核空间之间的接口函数内核在用户空间提供了很多子程序或者函数,它们允许用户应用程序员和硬件进行交互。
Linux I2C设备驱动编写
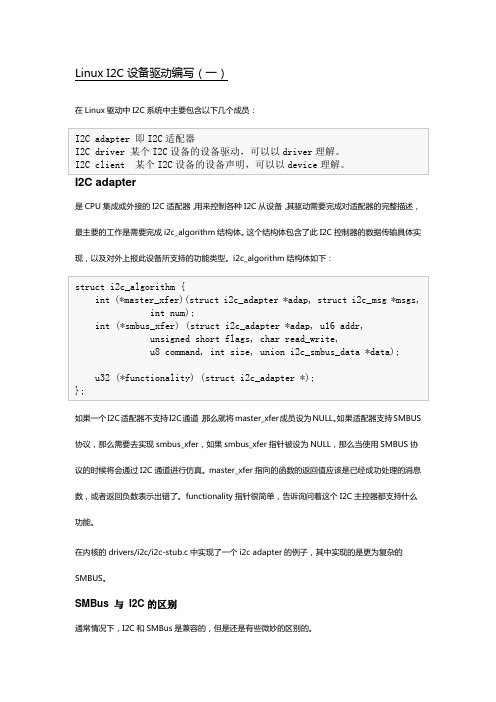
Linux I2C设备驱动编写(一)在Linux驱动中I2C系统中主要包含以下几个成员:如果一个I2C适配器不支持I2C通道,那么就将master_xfer成员设为NULL。
如果适配器支持SMBUS 协议,那么需要去实现smbus_xfer,如果smbus_xfer指针被设为NULL,那么当使用SMBUS协议的时候将会通过I2C通道进行仿真。
master_xfer指向的函数的返回值应该是已经成功处理的消息数,或者返回负数表示出错了。
functionality指针很简单,告诉询问着这个I2C主控器都支持什么功能。
在内核的drivers/i2c/i2c-stub.c中实现了一个i2c adapter的例子,其中实现的是更为复杂的SMBUS。
SMBus 与I2C的区别通常情况下,I2C和SMBus是兼容的,但是还是有些微妙的区别的。
时钟速度对比:在电气特性上他们也有所不同,SMBus要求的电压范围更低。
I2C driver具体的I2C设备驱动,如相机、传感器、触摸屏、背光控制器常见硬件设备大多都有或都是通过I2C 协议与主机进行数据传输、控制。
结构体如下:如同普通设备的驱动能够驱动多个设备一样,一个I2C driver也可以对应多个I2C client。
以重力传感器AXLL34X为例,其实现的I2C驱动为:这里要说明一下module_i2c_driver宏定义(i2c.h):module_driver():理解上述宏定义后,将module_i2c_driver(adxl34x_driver)展开就可以得到:这一句宏就解决了模块module安装卸载的复杂代码。
这样驱动开发者在实现I2C驱动时只要将i2c_driver结构体填充进来就可以了,无需关心设备的注册与反注册过程。
I2C client即I2C设备。
I2C设备的注册一般在板级代码中,在解析实例前还是先熟悉几个定义:下面还是以adxl34x为例:这样ADXL34X的i2c设备就被注册到了系统中,当名字与i2c_driver中的id_table中的成员匹配时就能够出发probe匹配函数了。
如何编写Linux下的USB键盘驱动
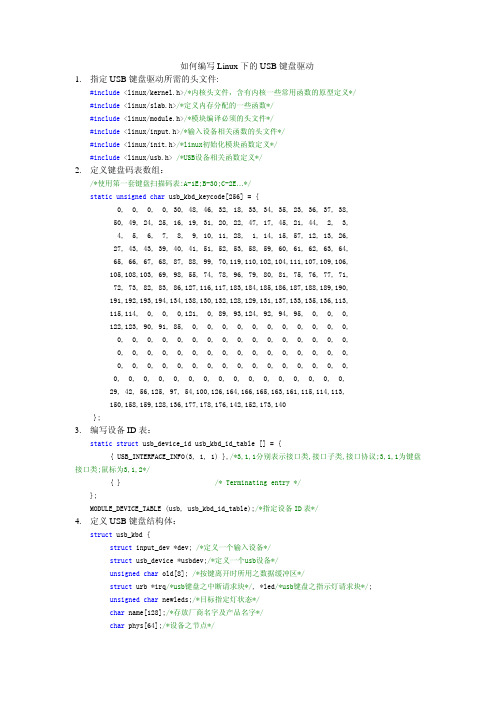
{
int result = usb_register(&usb_kbd_driver);/*注册USB键盘驱动*/
if (result == 0) /*注册失败*/
info(DRIVER_VERSION ":" DRIVER_DESC);
return result;
}
7. 编写模块卸载函数(每个驱动都会有一个卸载函数,由 module_exit 调用):
/*若同时只按下1个按键则在第[2]个字节,若同时有两个按键则第二个在第[3]字节,类推最多 可有6个按键同时按下*/ for (i = 2; i < 8; i++) { /*获取键盘离开的中断*/
if (kbd->old[i] > 3 && memscan(kbd->new + 2, kbd->old[i], 6) == kbd->new + 8) {/* 同时没有该KEY的按下状态*/
if (usb_kbd_keycode[kbd->old[i]]) {
input_report_key(kbd->dev, usb_kbd_keycode[kbd->old[i]], 0); } else
info("Unknown key (scancode %#x) released.", kbd->old[i]); }
接口类;鼠标为3,1,2*/
{}
/* Terminating entry */
};
MODULE_DEVICE_TABLE (usb, usb_kbd_id_table);/*指定设备 ID 表*/
4. 定义 USB 键盘结构体:
2-Linux驱动和内核模块编程

设备驱动的Hello World模块 设备驱动的 模块
模块卸载函数
static void __exit cleanup_function(void) { /* 释放资源 */ } module_exit(cleanup_function);
在模块被移除前注销接口并 释放所有所占用的系统资源
标识这个代码是只用于模块卸载( 标识这个代码是只用于模块卸载 通过使编译器把它放在 特殊的 ELF 段) 原型: 原型:#define __exit __attribute__ ((__section__(“.exit.text”)))
查看已加载模块
lsmod cat /proc/modules.
卸载驱动模块 卸载模块
从内核中卸载模块可以用rmmod工具.
注意,如果内核认为该模块任然在使用状态, 注意,如果内核认为该模块任然在使用状态,或 者内核被禁止移除该模块,则无法移除该模块。 者内核被禁止移除该模块,则无法移除该模块。
内核打印函数
隐藏硬件细节,提高应用软件的可移植性 提供安全性 开发模式 内核态驱动 用户态驱动
提供机制,而不是提供策略
机制:驱动程序能实现什么功能 策略:用户如何使用这些功能
设备的分类和特点Biblioteka 设备分类字符设备(char device) 字符设备 块设备(block device) 块设备 网络设备(network device) 网络设备
MODULE_LICENSE()---模块许可证声明 模块许可证声明
模块许可证(LICENSE)声明描述内核模块的许可权限 如果不声明LICENSE,模块被加载时,将收到内核被污染(kernel tainted)的警告
动手写一个内核模块
linux驱动编程初级+makefile

驱动编程1 模块的概述 (2)2 source insight 加载内核源码方法 (2)3 模块makefile的编写 (3)4 模块makefile编写方法 (4)5 在X86上运行模块: (5)6 编写模块 (5)7 模块的加载进内核命令 (5)8 最简单的上层调用+ 调用驱动方法 (6)9 复杂框架上层应用+驱动调用方法 (7)10 复杂框架字符设备创建并注册过程 (7)11 file_operations常用函数 (9)12 同步互斥操作 (10)13 同步互斥函数总结 (10)14 阻塞IO编程流程 (11)15 轮询操作上层select 下层poll (12)16 信号处理 (12)17 中断 (13)18 中断新模型--上半部中断和下半部中断的实现 (14)19 内核定时器编程 (15)20 内核延时函数 (15)21 内核源代码中头文件分配方式 (15)22 linux内核管理和内核的内存管理 (16)23 设备io端口和io内存访问–如何控制led的亮灭 (16)24 * 驱动-设备分离思想编程————内核进阶 (18)25 驱动-设备分离-核心最小架构 (18)26 驱动设备分离思想- 上层架构(基于封装) (20)27 头文件总结 (24)28 设置系统自启动命令u-boot (24)第一天需要理清的东西1)模块的概念,模块与应用的区别2)模块主要的组成头文件、module_init() modoule_exit() module_lisence()3)模块的如何编辑,如何编译,如何加载到内核中运行使用makefile4)模块驱动编写,必须通过上层应用程序调用。
1模块的概述模块是内核的一部分,为了防止内核太大,把它放在文件系统里面。
也可以在编译内核的直接编译进内核。
1,存储位置可以在开始时编译进内核,也可以编译进模块,最后加载2、运行时环境在哪个内核树下编译,就对应这个运行环境3、模块的编译问题:前提条件是需要对应的内核源码树,或者必须有对应的内核版本匹配4、模块编译使用makefile 注意makefile的编写2source insight 加载内核源码方法在windows下创建工程,使用source insight查看内核代码:2.1 先将内核源码拷到对应的文件夹2.2 在source insight 里添加工程,筛选需要添加的文件注意选择按照树来添加,然后按照remove来踢出不需要的文件夹2.3 最后同步3模块makefile的编写模块的编译:1)、模块编译的核心语句:$(MAKE) -C $(KERNELDIR) M=$(PWD) modules-C :进入内核源码树M= : 返回到当前目录,再次执行该目录下的makefileeg: /tnt/abc.c -----> abc.ko1、在/tnt目录下敲make,只有/tnt目录下的Makefile被调用2、目的是要进入到内核源码树中,一进一回,-C来进,M=带着内核源码树中的makefile的功能回来了-------内核源码树中Makefile的目标:obj-y:汇集了所有编译进内核的目标文件obj-m:汇集了所有编译成模块的目标文件3、回来过后,我们只有确定obj-m变量的集合4、make modules告诉内核的makefile,只做编译模块的功能4模块makefile编写方法ifeq ($(KERNELRELEASE),)KERNELDIR := /work/linux-2.6.35-farsightPWD := $(shell pwd)modules:$(MAKE) -C $(KERNELDIR) M=$(PWD) modulesinstall:$(MAKE) -C $(KERNELDIR) M=$(PWD) modules_installclean:rm -rf .tmp_versions *.ko *.o .*.cmd *.mod.c *.order *.symvers.PHONY: modules cleanelseobj-m := ex1.oendif以上是makefile的内容,●注意原来的内核目录树不要进行make clean 或者make distclean●KERNELDIR 表示模块加载在哪个内核的文件夹(又叫内核源码树),●$(MAKE) -C $(KERNELDIR) M=$(PWD) modules 表示进入该内核文件夹,将顶层makefile 中的内容带回,再重新执行一次该makefile 将obj-m := ex1.o 编译,并执行make modules (并只编译ex1.c ,不编译其它模块)●$(MAKE) -C $(KERNELDIR) M=$(PWD) modules_install 表示执行顶层makefile的modules install 标签下的命令●安装的位置原来默认在/lib 下面,所以需要修改其到我们制作的根文件系统下/work/rootfs/在顶层Makefile位置搜索:MODLIB修改为:●obj-m := ex1.o 你需要编译的.c的文件名****************************此时简单的编译环境已经搭建完毕******************* ****************************执行make ***********************************************执行make install *******************在/work/rootfs/lib/modules/2.6.35/extra即可找到该模块.ko*****************************************************************************搭建好环境,保证虚拟机与板子与计算机网络连通,并设置板子u-boot 从nfs挂载,启动内核,并成功通过nfs 加载rootfs,此时环境完毕,进入/work/rootfs/lib/modules/2.6.35/extra ,找到模块,加载卸装模块操纵5在X86上运行模块:修改Makefile中的内核源码树的目录X86下的内核源码树:/lib/modules/2.6.35-22-generic/build如果没有在控制台上交互,默认是看不到信息的,需要dmesg这个命令去查看6编写模块模块最小组成如下:●注意:module_init module_exit 必须放在末尾●注意:函数的原型返回值●头文件7模块的加载进内核命令insmodrmmodlsmod8最简单的上层调用+ 调用驱动方法8.1 首先在module_init(abc) abc函数中注册设备register_chrdev(注册设备号,上层可见的设备名,操作封装)该函数完成设备注册,在板子上用cat /proc/devices 便可以看见该设备8.2 完成fops 操作的封装●注意格式●必须在函数后面声明该结构体●头文件#include <linux/fs.h>8.3 查看到该字符设备后,创建设备节点,则上层通过设备字符名与该设备号绑定mknod /dev/hf_char c 245 0ls /dev/ 可以查看注册的所有设备节点8.4 此时上层应用的open(”hf_char”,O_RDWR),即可完成该设备的打开,即可以完成上层应用于下层驱动相关fops 的操作。
第3章linux程序设计基础精品PPT课件

3.3 Gdb调试器
应用程序的调试是开发过程中必不可少的环节 之一。Linux下GNU的调试器称之为GDB。
GDB调试的是可执行文件而不是源程序。 在用gdb调试之前,必须使用带有-g编译选项
的gcc命令来编译源程序。 gdb 所提供的一些功能:
监控程序中变量的值. 配置断点以使程序在指定的代码行上停止执行. 一行行的执行程序代码
:e 创建新文件
:n 加载新文件
:! command 执行shell命令
3.2 Linux下编译器
1、程序编译四个过程:
1)预处理—分析命令及语法 2)将预处理后的文件转换成汇编语言 3)由汇编变为目标代码(机器代码)生成.o的文件 4)连接目标代码,生成可执行程序
3.2 Linux下编译器
2、Gcc编译选项解析
3.3 Gdb调试器
Gdb命令语法: ➢ gdb [options] Gdb使用 ➢ gdb myprogram
3.3 Gdb调试器
3.3 Gdb调试器
3.3 Gdb调试器
3.3 Gdb调试器
Do you have any questions?
The end!
课件下载后可自由编辑,如有不m编辑器的使用
3.1 Vim编辑器的使用
2)查询命令
注:从文件头向文件尾为向前; 从文件尾向文件头为向后
/abc 向前查询abc
?abc 向后查询abc
n 向前继续查询
N 向后继续查询
3) 其他
:set nu 显示行号
:set nonu 取消显示行号
之处可根据本节内容进行提问
Thank you for coming and listening,you can ask questions according to this section and this courseware can be downloaded and edited freely
Linux驱动之LCD驱动编写

Linux驱动之LCD驱动编写在这篇博客中已经分析了编写LCD驱动的步骤,接下来就按照这个步骤来字尝试字节编写LCD驱动。
⽤的LCD屏幕为tft 屏,每个像素点为16bit。
对应与红绿蓝分别为565。
1、分配⼀个fb_info结构2、设置fb_info结构3、硬件相关的操作,配置LCD时钟、配置IO端⼝、配置LCD寄存器。
4、最终注册fbinfo结构到registered_fb数组要理解LCD的⼯作原理,需要了解LCD的时钟,在TFT的LCD中有如下的时钟。
这个⼏个时钟数据在配置LCD寄存器时都说需要设置的。
1、VCLK:两个像素之间的时钟,即两个像素隔多长时间才能显⽰下⼀个像素2、HSYNC:⽔平同步时钟,即第⼀⾏像素点显⽰完成之后隔多长时间才能开始下⼀⾏的显⽰3、VSYNC:垂直⽅向的同步时钟,也叫帧同步信号,即⼀帧数据显⽰完成之后(⼀帧数据表⽰⼀个屏幕显⽰完成,即⼀个显存的数据全部取完),过多长下⼀帧数据才开始显⽰本节需要⽤到的函数:void *dma_alloc_writecombine(struct device *dev, size_t size, dma_addr_t *handle, gfp_t gfp); //分配DMA缓存区给显存//返回值为:申请到的DMA缓冲区的虚拟地址,若为NULL,表⽰分配失败,则需要使⽤dma_free_writecombine()释放内存,避免内存泄漏//参数如下://*dev:指针,这⾥填0,表⽰这个申请的缓冲区⾥没有内容//size:分配的地址⼤⼩(字节单位)//*handle:申请到的物理起始地址//gfp:分配出来的内存参数,标志定义在<linux/gfp.h>,常⽤标志如下://GFP_ATOMIC ⽤来从中断处理和进程上下⽂之外的其他代码中分配内存. 从不睡眠.//GFP_KERNEL 内核内存的正常分配. 可能睡眠.//GFP_USER ⽤来为⽤户空间页来分配内存; 它可能睡眠.分配⼀段DMA缓存区,分配出来的内存会禁⽌cache缓存(因为DMA传输不需要CPU)它和 dma_alloc_coherent ()函数相似,不过 dma_alloc_coherent ()函数是分配出来的内存会禁⽌cache缓存以及禁⽌写⼊缓冲区dma_free_writecombine(dev,size,cpu_addr,handle); //释放缓存//cpu_addr:虚拟地址,//handle:物理地址释放DMA缓冲区, dev和size参数和上⾯的⼀样struct fb_info *framebuffer_alloc(size_t size, struct device *dev); //申请⼀个fb_info结构体,//size:额外的内存,//*dev:指针, 这⾥填0,表⽰这个申请的结构体⾥没有内容int register_framebuffer(struct fb_info *fb_info);//向内核中注册fb_info结构体,若内存不够,注册失败会返回负数int unregister_framebuffer(struct fb_info *fb_info) ;//注销内核中fb_info结构体本节需要⽤到的结构体:fb_info结构体如下:struct fb_info {... ...struct fb_var_screeninfo var; //可变的参数struct fb_fix_screeninfo fix; //固定的参数... ...struct fb_ops *fbops; //操作函数... ...char __iomem *screen_base; //显存虚拟起始地址unsigned long screen_size; //显存虚拟地址长度void *pseudo_palette;//假的16⾊调⾊板,⾥⾯存放了16⾊的数据,可以通过8bpp数据来找到调⾊板⾥⾯的16⾊颜⾊索引值,模拟出16⾊颜⾊来,节省内存,不需要的话就指向⼀个不⽤的数组即可 ... ...};其中操作函数fb_info-> fbops 结构体写法如下:static struct fb_ops s3c_lcdfb_ops = {.owner = THIS_MODULE,.fb_setcolreg = my_lcdfb_setcolreg,//设置调⾊板fb_info-> pseudo_palette,⾃⼰构造该函数.fb_fillrect = cfb_fillrect, //填充矩形,⽤/drivers/video/ cfbfillrect.c⾥的函数即可.fb_copyarea = cfb_copyarea, //复制数据, ⽤/drivers/video/cfbcopyarea.c⾥的函数即可.fb_imageblit = cfb_imageblit, //绘画图形, ⽤/drivers/video/imageblit.c⾥的函数即可};固定的参数fb_info-> fix 结构体如下:struct fb_fix_screeninfo {char id[16]; //id名字unsigned long smem_start; //framebuffer物理起始地址__u32 smem_len; //framebuffer长度,字节为单位__u32 type; //lcd类型,默认值0即可__u32 type_aux; //附加类型,为0__u32 visual; //画⾯设置,常⽤参数如下// FB_VISUAL_MONO01 0 单⾊,0:⽩⾊,1:⿊⾊// FB_VISUAL_MONO10 1 单⾊,1:⽩⾊,0:⿊⾊// FB_VISUAL_TRUECOLOR 2 真彩(TFT:真彩)// FB_VISUAL_PSEUDOCOLOR 3 伪彩// FB_VISUAL_DIRECTCOLOR 4 直彩 __u16 xpanstep; /*如果没有硬件panning就赋值为0 */ __u16 ypanstep; /*如果没有硬件panning就赋值为0 */ __u16 ywrapstep; /*如果没有硬件ywrap就赋值为0 */ __u32 line_length; /*⼀⾏的字节数 ,例:(RGB565)240*320,那么这⾥就等于240*16/8 */ /*以下成员都可以不需要*/ unsigned long mmio_start; /*内存映射IO的起始地址,⽤于应⽤层直接访问寄存器,可以不需要*/__u32 mmio_len; /* 内存映射IO的长度,可以不需要*/__u32 accel;__u16 reserved[3];};可变的参数fb_info-> var 结构体如下:structfb_var_screeninfo{ __u32xres; /*可见屏幕⼀⾏有多少个像素点*/__u32 yres; /*可见屏幕⼀列有多少个像素点*/__u32 xres_virtual; /*虚拟屏幕⼀⾏有多少个像素点 */__u32 yres_virtual; /*虚拟屏幕⼀列有多少个像素点*/__u32 xoffset; /*虚拟到可见屏幕之间的⾏偏移,若可见和虚拟的分辨率⼀样,就直接设为0*/ __u32 yoffset; /*虚拟到可见屏幕之间的列偏移*/__u32 bits_per_pixel; /*每个像素的位数即BPP,⽐如:RGB565则填⼊16*/__u32 grayscale; /*⾮0时,指的是灰度,真彩直接填0即可*/struct fb_bitfield red; //fb缓存的R位域, fb_bitfield结构体成员如下://__u32 offset; 区域偏移值,⽐如RGB565中的R,就在第11位//__u32 length; 区域长度,⽐如RGB565的R,共有5位//__u32 msb_right; msb_right ==0,表⽰数据左边最⼤, msb_right!=0,表⽰数据右边最⼤struct fb_bitfield green; /*fb缓存的G位域*/struct fb_bitfield blue; /*fb缓存的B位域*/ /*以下参数都可以不填,默认为0*/struct fb_bitfield transp; /*透明度,不需要填0即可*/__u32nonstd; /* != 0表⽰⾮标准像素格式*/__u32 activate; /*设为0即可*/__u32height; /*外设⾼度(单位mm),⼀般不需要填*/__u32width; /*外设宽度(单位mm),⼀般不需要填*/__u32 accel_flags; /*过时的参数,不需要填*//* 除了pixclock本⾝外,其他的都以像素时钟为单位*/__u32pixclock; /*像素时钟(⽪秒)*/__u32 left_margin; /*⾏切换,从同步到绘图之间的延迟*/__u32right_margin; /*⾏切换,从绘图到同步之间的延迟*/__u32upper_margin; /*帧切换,从同步到绘图之间的延迟*/__u32lower_margin; /*帧切换,从绘图到同步之间的延迟*/__u32hsync_len; /*⽔平同步的长度*/__u32 vsync_len; /*垂直同步的长度*/__u32 sync;__u32 vmode;__u32 rotate;__u32reserved[5]; /*保留*/}1.写驱动程序:(驱动设置:参考⾃带的LCD平台驱动drivers/video/s3c2410fb.c )1.1 步骤如下:在驱动init⼊⼝函数中:1)分配⼀个fb_info结构体2)设置fb_info 2.1)设置固定的参数fb_info-> fix 2.2) 设置可变的参数fb_info-> var 2.3) 设置操作函数fb_info-> fbops 2.4) 设置fb_info 其它的成员3)设置硬件相关的操作 3.1)配置LCD引脚 3.2)根据LCD⼿册设置LCD控制器 3.3)分配显存(framebuffer),把地址告诉LCD控制器和fb_info4)开启LCD,并注册fb_info: register_framebuffer() 4.1) 直接在init函数中开启LCD(后⾯讲到电源管理,再来优化) 控制LCDCON5允许PWREN信号, 然后控制LCDCON1输出PWREN信号, 输出GPB0⾼电平来开背光, 4.2) 注册fb_info在驱动exit出⼝函数中:1)卸载内核中的fb_info2) 控制LCDCON1关闭PWREN信号,关背光,iounmap注销地址3)释放DMA缓存地址dma_free_writecombine()4)释放注册的fb_info1.2 具体代码如下:#include <linux/module.h>#include <linux/kernel.h>#include <linux/fs.h>#include <linux/init.h>#include <asm/io.h> //含有iomap函数iounmap函数#include <asm/uaccess.h>//含有copy_from_user函数#include <linux/device.h>//含有类相关的处理函数#include <linux/fb.h> //含有fb_info结构体定义//#include <asm/dma-mapping.h> //含有dma_free_writecombine宏定义#include <linux/dma-mapping.h> //含有dma_free_writecombine宏定义#include <linux/platform_device.h>//含有平台设备总线模型相关变量#include <linux/mm.h>#include <linux/slab.h>//#include <linux/module.h>//#include <linux/kernel.h>//#include <linux/errno.h>//#include <linux/string.h>//#include <linux/mm.h>//#include <linux/slab.h>//#include <linux/delay.h>//#include <linux/fb.h>//#include <linux/init.h>//#include <linux/dma-mapping.h>//#include <linux/interrupt.h>//#include <linux/workqueue.h>//#include <linux/wait.h>//#include <linux/platform_device.h>//#include <linux/clk.h>//#include <asm/io.h>//#include <asm/uaccess.h>//#include <asm/div64.h>//#include <asm/mach/map.h>//#include <asm/arch/regs-lcd.h>//#include <asm/arch/regs-gpio.h>//#include <asm/arch/fb.h>/*lcd控制寄存器放在⼀个结构体⾥⾯*/struct lcd_regs {unsigned long lcdcon1;unsigned long lcdcon2;unsigned long lcdcon3;unsigned long lcdcon4;unsigned long lcdcon5;unsigned long lcdsaddr1;unsigned long lcdsaddr2;unsigned long lcdsaddr3;unsigned long redlut;unsigned long greenlut;unsigned long bluelut;unsigned long reserved[9];unsigned long dithmode;unsigned long tpal;unsigned long lcdintpnd;unsigned long lcdsrcpnd;unsigned long lcdintmsk;unsigned long lpcsel;};static struct fb_info *s3c_mylcdfb_info;//fb_info结构体static volatile unsigned long *gpbcon;//GPB0⽤于lcd背光的控制static volatile unsigned long *gpbdat;//GPB0⽤于lcd背光的控制static volatile unsigned long *gpccon;static volatile unsigned long *gpdcon;static volatile unsigned long *gpgcon;//GPG4⽤于lcd电源static volatile struct lcd_regs* lcd_regs;//lcd寄存器static u32 pseudo_palette[16]; //调⾊板内存/* from pxafb.c */static inline unsigned int chan_to_field(unsigned int chan, struct fb_bitfield *bf){chan &= 0xffff; //取出16bit的数据chan >>= 16 - bf->length; //return chan << bf->offset;}static int s3c_mylcdfb_setcolreg(unsigned int regno, unsigned int red,unsigned int green, unsigned int blue,unsigned int transp, struct fb_info *info){unsigned int val;if (regno > 16)return1;/* ⽤red,green,blue三原⾊构造出val */val = chan_to_field(red, &info->var.red);val |= chan_to_field(green, &info->var.green);val |= chan_to_field(blue, &info->var.blue);//((u32 *)(info->pseudo_palette))[regno] = val;pseudo_palette[regno] = val;return0;}static struct fb_ops s3c_mylcdfb_ops = { //操作函数结构体.owner = THIS_MODULE,.fb_setcolreg = s3c_mylcdfb_setcolreg,//待会设置,这个是调⾊板,如果使⽤⼩于16bit的像素需要⽤到 .fb_fillrect = cfb_fillrect,.fb_copyarea = cfb_copyarea,.fb_imageblit = cfb_imageblit,};static int lcd_drv_init(void){/*1、分配⼀个fb_info*/s3c_mylcdfb_info = framebuffer_alloc(0,NULL);//size为额外分配的⼤⼩,这⾥不需要,所以设为0if(s3c_mylcdfb_info==NULL){printk("unframebuffer_alloc\n");return1;}/*2、设置*//*2.1 设置固定的参数*/strcpy(s3c_mylcdfb_info->fix.id, "mylcd");//名字//s3c_mylcdfb_info->fix.smem_start = ;//显存的物理起始地址,后⾯设置s3c_mylcdfb_info->fix.smem_len = 480*272*16/8;//单位为字节,每个像素点占⽤16bit :565,显存的⼤⼩ s3c_mylcdfb_info->fix.type = FB_TYPE_PACKED_PIXELS;//LCD类型,填充像素的类型 tft//s3c_mylcdfb_info->fix.type_aux= //附加的LCD类型,不需要设置s3c_mylcdfb_info->fix.visual = FB_VISUAL_TRUECOLOR;//视觉类型,选择真彩⾊s3c_mylcdfb_info->fix.line_length = 480*16/8; //⼀⾏的长度,单位为字节// s3c_mylcdfb_info->fix.mmio_start = //控制lcd的寄存器的物理地址// s3c_mylcdfb_info->fix.mmio_len = //控制lcd的寄存器的⼤⼩/*2.2 设置可变的参数*/s3c_mylcdfb_info->var.xres = 480;//x⽅向的分辨率s3c_mylcdfb_info->var.yres = 272;//y⽅向的分辨率s3c_mylcdfb_info->var.xres_virtual = 480;//x⽅向的虚拟分辨率s3c_mylcdfb_info->var.yres_virtual = 272;//y⽅向的虚拟分辨率s3c_mylcdfb_info->var.bits_per_pixel = 16;//每个像素的⼤⼩,单位为bits3c_mylcdfb_info->var.grayscale = 0;//灰度值s3c_mylcdfb_info->var.red.length = 5;//红⾊像素占⽤的长度,单位bits3c_mylcdfb_info->var.green.length = 6;//绿⾊像素占⽤的长度,单位bits3c_mylcdfb_info->var.blue.length = 5;//蓝⾊像素占⽤的长度,单位bits3c_mylcdfb_info->var.red.offset= 11;//红⾊像素在16bit中的偏移值s3c_mylcdfb_info->var.green.offset= 6;//绿⾊像素在16bit中的偏移值s3c_mylcdfb_info->var.blue.offset=0;//蓝⾊像素在16bit中的偏移值s3c_mylcdfb_info->var.red.msb_right= 0;//低位在前还是⾼位在前,⼀般⾼位在前,也就是⼩端模式s3c_mylcdfb_info->var.green.msb_right= 0;s3c_mylcdfb_info->var.blue.msb_right=0;s3c_mylcdfb_info->var.activate = FB_ACTIVATE_NOW;//使⽤默认参数,显存⽴刻⽣效/*2.3 设置操作函数*/s3c_mylcdfb_info->fbops = &s3c_mylcdfb_ops;/*2.4 其它的⼀些设置 */s3c_mylcdfb_info->pseudo_palette = pseudo_palette;//调⾊板的地址//s3c_mylcdfb_info->screen_base = ;//显存的虚拟基地址s3c_mylcdfb_info->screen_size = 480*272*16/8;//单位为字节,每个像素点占⽤16bit :565,显存的⼤⼩/*3、硬件相关的操作 *//*3.1、配置GPIO⽤于LCD*/gpbcon = ioremap(0x56000010, 8);//将实际的寄存器地址转换为虚拟地址gpccon = ioremap(0x56000020 , 4);gpdcon = ioremap(0x56000030 , 4);gpgcon = ioremap(0x56000060 , 4);gpbdat = gpbcon + 1;*gpccon = 0xaaaaaaaa; /* GPIO管脚⽤于VD[7:0],LCDVF[2:0],VM,VFRAME,VLINE,VCLK,LEND */*gpdcon = 0xaaaaaaaa; /* GPIO管脚⽤于VD[23:8] */*gpbcon &= ~(3); /* GPB0设置为输出引脚 */*gpbcon |= 1;*gpbdat &= ~1; /* 输出低电平关闭LCD背光 */*gpgcon |= (3<<8); /* GPG4⽤作LCD_PWREN 电源*//*3.2、根据LCD⼿册设置LCD控制器,⽐如VCLK的频率等 */lcd_regs = ioremap(0X4D000000 , sizeof(struct lcd_regs));/** bit[17:8] : VCLK = HCLK / [(CLKVAL+1) x 2]* 10M = 100M/[(CLKVAL+1) x 2]* CLKVAL = 4** bit[6:5] :PNRMODE = 11显⽰模式,选择TFT模式** bit[4:1] :BPPMODE = 1100;像素=16bit 565** bit[0] :ENVID = 0;先关闭LCD控制器*/lcd_regs->lcdcon1 = (4<<8) | (3<<5) | (0x0c<<1);///** [31:24] : VBPD = 帧同步信号发出后,过多长时间开始显⽰数据,单位为⾏,理解为1⾏的时间* 看LCD⼿册tvb = VBPD + 1 = 2;所以VBPD = 1** [23:14]:LINEVAL + 1= 272;,所以LINEVAL = 271;垂直⽅向尺⼨,多少⾏** [13:6]:VFPD = ⼀帧的数据传输完成之后,过多长时间开始下⼀帧数据的帧同步信号,单位为⾏,理解为1⾏的时间 * 看LCD⼿册tvf = VFPD + 1 = 2;所以VFPD = 1** [5:0]:VSPW = 帧同步信号的脉冲宽度,单位为⾏* 看LCD⼿册tvp = VSPW + 1 =10;所以VSPW = 9*/lcd_regs->lcdcon2 = (1<<24) | (271<<14) | (1<<6) | (9<<0);/** [25:19]:HBPD = ⾏同步信号发出后,经过多少个VCLK,才发送像素的数据,单位为VCLK* 看LCD⼿册thb = HBPD + 1 = 2;所以HBPD=1** [18:8]:HOZVAL + 1 = 480,所以 HOZVAL = 479;⽔平⽅向尺⼨,多少列**[7:0]:HFPD = ⼀⾏的像素数据传输完成之后,经过多长时间,才能发送下⼀个⾏同步信号,单位为VCLK*看LCD⼿册thf = HFPD + 1 = 2;所以HFPD = 1;*/lcd_regs->lcdcon3 = (1<<19) | (479<<8) | (1<<0);/** [7:0]:HSPW = ⾏同步信号的脉冲宽度,单位为VCLK* 看LCD⼿册thp = HSPW + 1 = 41;所以HSPW = 40**/lcd_regs->lcdcon4 = (40<<0);/** [11] :FRM565 = 1;16位模式的格式 R:G:B = 5:6:5* [10] :INVVCLK = 0;VCLK在哪个边沿取数据 = 0表⽰下降沿取数据* [9] :INVVLINE = 1;⾏同步信号是否需要反转= 1需要反转* [8] :INVVFRAME = 1;帧同步信号是否需要反转= 1需要反转* [7] :INVVD = 0; 数据是否需要反转* [6] :INVVDEN = 0; 数据使能信号是否需要反转* [5] :INVPWREN = 0;电源使能信号是否需要反转* [4] :INVLEND = 0;⾏结束信号是否需要反转* [3] :PWREN = 0;电源使能信号,先不使能* [2] :ENLEND = 1;//⾏结束信号先使能* [1:0] :BSWP 、HWSWP = 0 1;字节内部不需要交换,字节间需要交换*/lcd_regs->lcdcon5= (1<<11) | (3<<8) | (1<<2) | (1<<0);/*3.3、显存和调⾊板设置 *//**利⽤dma_alloc_writecombine分配⼀块连续的显存*/s3c_mylcdfb_info->screen_base = dma_alloc_writecombine(NULL,s3c_mylcdfb_info->screen_size,(&(s3c_mylcdfb_info->fix.smem_start)),GFP_KERNEL);//返回虚拟地址if(s3c_mylcdfb_info->screen_base==NULL) //如果显存分配失败,直接返回{printk("undma_alloc_writecombine\n");return1;}/**将显存的地址告诉LCD控制器(物理地址)*/lcd_regs->lcdsaddr1 = (s3c_mylcdfb_info->fix.smem_start >> 1) & (~(3<<30));//起始地址lcd_regs->lcdsaddr2 = ((s3c_mylcdfb_info->fix.smem_start + s3c_mylcdfb_info->screen_size) >> 1) & 0x1fffff;//结束地址lcd_regs->lcdsaddr3 = (480*16/16); /* ⼀⾏的长度(单位: 2字节) *///s3c_lcd->fix.smem_start = xxx; /* 显存的物理地址 *//* 启动LCD */lcd_regs->lcdcon1 |= (1<<0); /* 使能LCD控制器 */lcd_regs->lcdcon5 |= (1<<3); /* 使能LCD本⾝电源 */*gpbdat |= 1; /* 输出⾼电平, 使能背光 *//*4、注册LCD*/register_framebuffer(s3c_mylcdfb_info);printk("register_framebuffer\n");return0;}static void lcd_drv_exit(void){unregister_framebuffer(s3c_mylcdfb_info);lcd_regs->lcdcon1 &= ~(1<<0); /* 关闭LCD本⾝ */*gpbdat &= ~1; /* 关闭背光 */dma_free_writecombine(NULL, s3c_mylcdfb_info->fix.smem_len, s3c_mylcdfb_info->screen_base, s3c_mylcdfb_info->fix.smem_start);iounmap(lcd_regs);iounmap(gpbcon);iounmap(gpccon);iounmap(gpdcon);iounmap(gpgcon);framebuffer_release(s3c_mylcdfb_info);}module_init(lcd_drv_init);module_exit(lcd_drv_exit);MODULE_LICENSE("GPL");2.重新编译内核,去掉默认的LCDmake menuconfig ,进⼊menu菜单重新设置内核参数:进⼊Device Drivers-> Graphics support:<M> S3C2410 LCD framebuffer support //将⾃带的LCD驱动设为模块, 不编进内核中然后make uImage 编译内核make modules 编译模块为什么要编译模块?因为LCD驱动相关的⽂件也没有编进内核,⽽fb_ops⾥的成员fb_fillrect(), fb_copyarea(), fb_imageblit()⽤的都是drivers/video下⾯的3个⽂件,所以需要这3个的.ko模块,如下图所⽰:3.挂载驱动将编译好的LCD驱动模块和drivers/video⾥的3个.ko模块放⼊nfs⽂件系统⽬录中然后烧写内核, 先装载3个/drivers/video下编译好的模块,再来装载LCD驱动模块挂载LCD驱动后, 如下图,可以通过 ls -l /dev/fb* 命令查看已挂载的LCD设备节点:4.测试运⾏测试有两种:echo hello> /dev/tty1 // LCD上便显⽰hello字段cat Makefile>/dev/tty1 // LCD上便显⽰Makeflie⽂件的内容4.1使⽤上节的键盘驱动在LCD终端打印命令⾏vi /etc/inittab //修改inittab, inittab:配置⽂件,⽤于启动init进程时,读取inittab添加->tty1::askfirst:-/bin/sh //将sh进程(命令⾏)输出到tty1⾥,也就是使LCD输出信息然后重启,insmod装载3个/drivers/video下编译好的模块,再来insmod装载LCD驱动模块,tty1设备便有了,就能看到提⽰信息:如下图,我们insmod上⼀节的键盘驱动后,按下enter键,便能在LCD终端上操作linux了从上图可以看到按下enter键,它就启动了⼀个进程号772的-sh进程,如下图发现这个-sh的描述符都指向了tty1:以上内容转载⾃。
linux驱动基础知识
1.驱动程序:使硬件工作的软件驱动程序为操作硬件提供良好内部接口驱动程序为应用程序提供了访问设备的机制2.字符设备字符设备是一种按字节来访问的设备,字符驱动则负责驱动字符设备,这样的驱动通常实现open, close, read和write 系统调用。
顺序访问3.块设备只能一次传送一个或多个长度是512字节( 或一个更大的2 次幂的数)的整块数据。
块和字符设备的区别仅仅是驱动的与内核的接口不同。
随机访问4.块(block)设备和字符(character)设备的区别块设备有缓冲,因此能选择响应请求的顺序以提高性能,读的时候是一块一块的读。
块设备能随机访问。
存储设备一般是块设备。
字符设备没有缓冲,按顺序读取。
比如键盘,鼠标都是字符设备。
大多数设备都是字符设备,因为大多数设备都不需要块设备类型的缓冲。
5.网络接口任何网络事务都通过一个接口来进行, 一个接口通常是一个硬件设备(eth0), 但是它也可以是一个纯粹的软件设备, 比如回环接口(lo)。
一个网络接口负责发送和接收数据报文。
6.Linux内核功能的划分1)进程管理内核负责创建和销毁进程, 并处理它们与外部世界的联系(输入和输出). 不同进程间通讯(通过信号, 管道, 或者进程间通讯)对整个系统功能来说是基本的, 也由内核处理. 另外, 调度器, 控制进程如何共享CPU, 是进程管理的一部分. 更通常地, 内核的进程管理活动实现了多个进程在一个单个或者几个CPU 之上的抽象.2)内存管理计算机的内存是主要的资源, 处理它所用的策略对系统性能是至关重要的. 内核为所有进程的每一个都在有限的可用资源上建立了一个虚拟地址空间. 内核的不同部分与内存管理子系统通过一套函数调用交互, 从简单的malloc/free 对到更多更复杂的功能. 3)文件系统Unix 在很大程度上基于文件系统的概念; 几乎Unix 中的任何东西都可看作一个文件. 内核在非结构化的硬件之上建立了一个结构化的文件系统, 结果是文件的抽象非常多地在整个系统中应用. 另外, Linux 支持多个文件系统类型, 就是说, 物理介质上不同的数据组织方式. 例如, 磁盘可被格式化成标准Linux 的ext3 文件系统, 普遍使用的FAT 文件系统, 或者其他几个文件系统.4)设备控制几乎每个系统操作最终都映射到一个物理设备上. 除了处理器, 内存和非常少的别的实体之外, 全部中的任何设备控制操作都由特定于要寻址的设备相关的代码来进行. 这些代码称为设备驱动. 内核中必须嵌入系统中出现的每个外设的驱动, 从硬盘驱动到键盘和磁带驱动器5)网络网络必须由操作系统来管理, 因为大部分网络操作不是特定于某一个进程: 进入系统的报文是异步事件. 报文在某一个进程接手之前必须被收集, 识别, 分发. 系统负责在程序和网络接口之间递送数据报文, 它必须根据程序的网络活动来控制程序的执行. 另外, 所有的路由和地址解析问题都在内核中实现7.驱动程序的两大任务作为系统调用的一部分而执行,运行在进程上下文。
Linux底层驱动开发从入门到精通的学习路线推荐

Linux底层驱动开发从入门到精通的学习路线推荐Linux底层驱动开发是一项涉及操作系统核心的技术,对于想要深入了解Linux系统内部工作原理的开发人员来说,是一门重要的技能。
本文将为你推荐一条学习路线,帮助你从入门到精通掌握Linux底层驱动开发。
一、基础知识学习阶段在开始学习Linux底层驱动开发之前,你需要掌握一些基础知识。
以下是你可以参考的学习路线:1.1 Linux操作系统基础学习Linux操作系统的基础知识是理解和使用Linux底层驱动的前提。
可以选择阅读《鸟哥的Linux私房菜》等入门书籍,了解Linux的基本概念、命令行操作等。
1.2 C语言编程C语言是Linux底层驱动开发的主要语言。
建议学习《C Primer Plus》等经典教材,掌握C语言的基本语法和编程技巧。
1.3 Linux系统编程学习Linux系统编程是理解Linux内核和驱动开发的关键。
推荐学习《Linux系统编程手册》等教材,学习Linux系统调用、进程管理等知识。
1.4 数据结构与算法良好的数据结构和算法基础对于优化和设计高效的驱动程序至关重要。
可以学习《算法导论》等经典教材,掌握数据结构和常用算法的原理和实现。
二、Linux内核了解与分析阶段在掌握了基础知识后,你需要进一步了解Linux内核和驱动的工作原理。
以下是你可以参考的学习路线:2.1 Linux内核源码阅读通过阅读Linux内核源码,你可以深入了解Linux的内核机制和实现细节。
可以选择《深入理解Linux内核》等相关书籍,逐步学习Linux内核代码的组织结构和关键部分。
2.2 设备驱动模型了解Linux内核的设备驱动模型对于编写高效且可维护的驱动程序至关重要。
可以学习Linux设备驱动模型的相关文档和教程,例如Linux Device Drivers (LDD)等。
2.3 内核调试与分析工具掌握一些常用的内核调试和分析工具是进行底层驱动开发的必要技能。
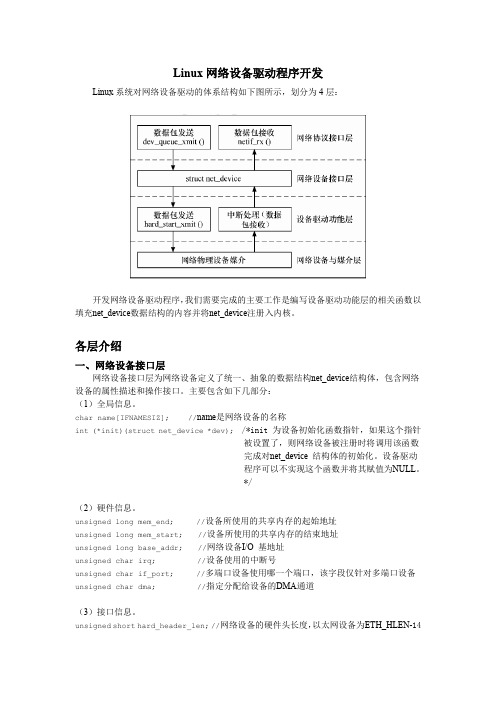
Linux网络驱动开发步骤
加载: int xxx_init_module(void) {
... /* 分配net_device结构体并对其成员赋值 */ xxx_dev = alloc_netdev(sizeof(struct xxx_priv), "sn%d",xxx_init);
if (xxx_dev == NULL) /* 分配net_device失败 */
二、设备驱动功能层
net_device 结构体的成员(属性和函数指针)需要被设备驱动功能层的具体数值 和函数赋予。对于具体的设备xxx,工程师应该编写设备驱动功能层的函数,这些函 数形如xxx_open()、xxx_stop()、xxx_start_xmit()、xxx_hard_header()、xxx_get_stats()、 xxx_tx_timeout()、xxx_poll()等。
设备驱动功能层的函数模板
void xxx_init(struct net_device *dev)
{ /*设备的私有信息结构体*/ struct xxx_priv *priv;
/* 检查设备是否存在和设备所使用的硬件资源 */ xxx_hw_init();
/* 初始化以太网设备的公用成员 */ ether_setup(dev);
unsigned short type;
//接口的硬件类型
unsigned mtu;
//最大传输单元(MTU)
unsigned char dev_addr[MAX_ADDR_LEN]; //存放设备的硬件地址
unsigned char broadcast[MAX_ADDR_LEN]; /*存放设备的广播地址, 以太网设备的广播
如何编写驱动程序
如何编写驱动程序编写驱动程序是一项相对复杂的任务,它与硬件交互并与操作系统进行通信。
在这篇文章中,我将提供一个简要的指南,帮助您了解如何编写驱动程序。
驱动程序是操作系统的一部分,用于管理和控制硬件设备。
它们允许操作系统与硬件交互,并提供硬件访问的接口。
驱动程序不仅仅是通过读写硬件寄存器来实现的,还需要处理中断请求、DMA、内存映射和其他底层硬件访问。
以下是编写驱动程序的一般步骤:1.硬件设备的了解:要编写一个驱动程序,首先需要了解所要驱动的硬件设备的工作原理和规范。
这包括它的寄存器布局、通信方式、中断请求等。
也可以查找相关的文档和参考资料。
2.操作系统的了解:每个操作系统都有自己的驱动程序开发框架和API。
要编写驱动程序,必须熟悉所使用的操作系统。
这包括操作系统的内核机制、设备管理、中断处理程序和设备驱动接口等。
3.驱动程序的架构设计:在开始编写驱动程序之前,需要设计一个驱动程序的架构。
这包括确定驱动程序的基本功能、组织结构和接口。
在这一阶段,可以考虑使用合适的设计模式,如观察者模式或策略模式。
4.编写设备初始化代码:设备初始化代码负责初始化硬件设备并确保它在操作系统中正确识别和配置。
这通常包括读写设备寄存器、设置中断请求、设置DMA等。
5.编写设备访问代码:设备访问代码负责实现驱动程序的主要功能,如读写数据、处理中断请求并与操作系统进行通信。
这可能涉及到编写ISR(中断服务例程)处理中断,实现设备驱动接口等。
6.进行驱动程序测试:在编写完驱动程序之后,应该对其进行测试以确保其正确性和稳定性。
可以编写一些测试用例来验证驱动程序是否按预期工作。
7.驱动程序的部署和调试:一旦驱动程序测试通过,就可以将其部署到操作系统中。
在部署过程中,可能需要进行一些调试和优化,以确保驱动程序的性能和可靠性。
可以使用调试工具来帮助定位和修复错误。
编写驱动程序需要一定的硬件和软件知识,并且需要耐心和细心来处理底层问题。