天文导航系统
天文导航发展趋势及其关键技术

K e r : Cee t l vg to ; De eo me t e d Ke e h oo is y wo ds lsi iain a Na v lp n n ; Tr yT c lge n
天文导航是利用对 自然天体的测量来确定 自 身的位置和航 向的导航技术。由于天体的位置是已 知的, 利用光学系统测量天体相对于导航用户参考
采用C MOS P 天体 敏感 器代 替 C D敏 感器 , S A C
提高辐射阻抗 、扩大的动态范围;采用大视场 、小 焦距且经过严格标校后 的高精度光电摄像系统,以
・9 3 0・
现代导航
2 1 生 01
33开 发人造 天体射 电导 航技 术 ‘
跟踪器等高精度天文导航系统使得天文 导航技术
设备简单造价低 ,便于推广应用,适用范围广的本
参考文献:
质特征,并为高精度、全天候天文导航技术的实现 [】 房建成,宁晓琳. 1 天文 导航原理及应用[ I .北京:北京 提供了条件 。 航 空航天大学 出版社, 0 6 20
实现高精度天文导航 。
32 发展 射 电技术 ,开 发全 天候导 航 系统 . 天文 导航 可分 为星光 导航 和射 电天文 导航 ,星 光导 航在天 体辐 射 的可见 光波 段实施 观测 ,射 电天 文导 航 则是 在天 体辐 射 的无 线 电信 号( 电信号) 射 波 段实 施测量 。星光 导航 由于受 气象条 件影 响严重 ,
候 高精 度天 文 导航 的必然选 择 。然 而 ,射 电天 文技
23基 于“ . 多星 矢量 定位技 术” 的大 视场 天文
导航 系统
术的特征之一,是 以地固基线作为地方矢量,并且 基线长度甚长,不便于在运动载体上直接应用 ,必 须消除地固矢量的制约, 研究不需要地固地方矢量
环月探测器自主天文导航系统的可观度分析
中 国 空 间 科 学 技 术
CH I ESE PA CE S EN CE N D N S CI A TEC H N 0 I( G Y )
20 0 7年 l 2月 第 6 期
环月 探 测 器 自主 天文 导航 系统 的可 观 度 分 析
量 测 系 统 的 可 观 性 , 反 映 了 系 统 通 过 测 量 有 限 时 间 内 的 观 测 量 确 定 系 统 状 态 的 能 力 。 而 只 有 系
统 是 可观测时 滤波 才是稳 定 的 ,若 导航 系统不 可观测 就 不能 估计 轨道 。所 以 ,判 断导 航 系统能 否满
足 任务要 求 的第 一 步 ,就 足分析 其 町观性【 。 】
月惯 坐标 系下分别 记 为 L M、L 和 L ( 图 1 : 见 ) 则 月球一 探 测器一 恒 星形成 的夹 角
器 一恒星 、月球 一探 测器 一太 阳两个 位置 面 ,雷达 测高 仪可获 得 月心距 ,通 过位 置面 和距离 信息 的组 合可 以解算 出探 测器 的位 置 。
若 假定 探测 器在 环月段 保持 严格 对月定 向状 态 ,此 时紫外 敏感 器的 中心 视场对 准月 球 中心 ,探测 器的本 体坐 标 系和轨 道 坐标 系重 合 。通过 敏感 器可 以测量 得 到月心 方 向单位 矢量 、恒 星方 向单 位矢 最 和太 阳方 向单位 矢量 。在
较 ,在 基 于误 差协方 差 阵的 可观性 分析 方法 基础上 ,提 出 了以谱 半径 定 义的可观 度 分析 方
法 ,并 证 明 了定 义 的 可 观 度 指 标 与 系统 导 航 精 度 的 关 系 ,说 明 其 能 够 定 量 描 述 系统 可 观 的 程 度 。 最后 仿 真 验 证 了这 种 可观 度 分 析 方 法 的 可 行 性 。
现代天文导航及其关键技术
现代天文导航及其关键技术一、本文概述Overview of this article随着科技的飞速进步和全球化的日益加深,天文导航作为一种古老而精确的导航技术,在现代社会中仍发挥着不可替代的作用。
天文导航不仅在海洋航行、空间探索等领域占据重要地位,而且在民用航空、卫星通信等方面也有着广泛的应用。
本文旨在全面介绍现代天文导航技术的发展现状、关键技术及其应用前景,以期为相关领域的研究者和实践者提供有价值的参考。
With the rapid progress of technology and the deepening of globalization, astronomical navigation, as an ancient and precise navigation technology, still plays an irreplaceable role in modern society. Astronomical navigation not only occupies an important position in fields such as ocean navigation and space exploration, but also has extensive applications in civil aviation, satellite communication, and other fields. This article aims to comprehensively introduce the current development status, key technologies, andapplication prospects of modern astronomical navigation technology, in order to provide valuable references for researchers and practitioners in related fields.文章首先将对天文导航的基本原理和历史发展进行简要回顾,以便读者对其有一个整体的认识。
天文导航基础(四)

探测器上自身携带的量测设备,通过观测天体 进行天文导航的方法。
5.4深空探测器的自主天文导航
天文导航作为辅助导航手段
水手9号拍摄的火卫二图像
海盗号的天文导航
5.4深空探测器的自主天文导航
海盗号的天文导航
水手9号的天文导航
5.4深空探测器的自主天文导航
旅行者号的拍摄的海王星及其卫星
5.4深空探测器的自主天文导航
深空探测器天文导航的关键技术和发展趋势 • 一类是与自主天文导航理论和方法相关的关键技术; • 一类是与导航系统硬件相关的关键技术。
天文导航理论 状态方程的精确建模 新型测量原理和相应量测方程的建立 先进滤波方法及相应的理论在天文导航中的应用 天文组合导航方法
5.4深空探测器的自主天文导航
天文导航系统技术
观测量示意图
5.1.3基于 “日-地-月”导航
通过观测日-地-月信息,确定地心赤道惯性坐标系下的 航天器位置矢量。
几何关系及观测量示意图
5.1.3基于 “日-地-月”导航
几何关系示意图
5.1.4基于星光折射的天文导航方法
• 通过星光折射间接敏感地平方法,是80年代初发 展起来的一种航天飞行器低成本自主定位方案。
5.4深空探测器的自主天文导航
观测量及观测方程
行星的视角
恒星仰角
5.4深空探测器的自主天文导航
观测量及观测方程
掩星观测
5.4深空探测器的自主天文导航
观测量及观测方程
一个近天体和一个远天体间的夹角
夹角确定的位置面
5.4深空探测器的自主天文导航
观测量及观测方程
两个近天体间的夹角确定位置面
两个近天体间的夹角
5.5射电天文导航
船用天文导航设备的工作原理及其应用方法介绍
船用天文导航设备的工作原理及其应用方法介绍导航是航海中的重要环节,而天文导航作为传统的导航方法之一,在航海史上扮演着重要的角色。
船用天文导航设备通过观测天体的位置、运动和亮度等参数,并根据天体导航规则和天体表进行计算,以确定船舶的位置和方向。
本文将详细介绍船用天文导航设备的工作原理以及应用方法。
一、船用天文导航设备的工作原理船用天文导航设备主要基于天体的位置和运动进行导航计算。
其工作原理可以分为以下几个步骤:1. 天体观测:船舶上安装有天文仪器,如船舶六分仪、船舶光电全球定位仪等,用于观测天体的位置、亮度和运动等相关参数。
观测通常在夜晚进行,以确保天体的可见性。
2. 计算观测数据:根据观测到的天体数据,包括天体的赤经、赤纬、视差和时间等,利用导航星表和计算公式进行计算。
导航星表是按照天体在天空中的位置和亮度等参数编制的一份详细表格,它能够帮助确定观测到的天体的身份和位置。
3. 确定位置和方向:通过观测数据的计算,船用天文导航设备能够确定船舶的准确位置和航向。
其中,船舶的位置是通过天体的赤经和赤纬计算得出,而航向则是通过天体的方位角和高度角计算得出。
二、船用天文导航设备的应用方法1. 天文纬度法:航海中常用的一种船用天文导航方法是天文纬度法。
该方法是根据某一天体(通常是北极星)在天空中的位置,结合仪器观测数据进行计算,确定船舶所处的纬度。
通过在不同时间观测同一天体的高度角,结合天文表和计算公式,可以推算出船舶的纬度。
2. 天文经度法:天文经度法是通过观测不同天体间的角距离,结合测量时间和观测数据进行计算,确定船舶所处的经度。
在进行观测时,需要准确测量天体的视差、方位角和高度角等参数,并据此进行计算。
天文经度法的精度较高,但观测过程较繁琐,需要船员具备一定的天文观测技能和知识。
3. 光电全球定位仪(GPS)辅助:随着现代技术的发展,船用天文导航设备通常结合GPS导航系统进行使用,以提高导航的准确性和可靠性。
天文导航的原理和应用pdf
天文导航的原理和应用pdf1. 引言天文导航是一种利用天体的位置和运动来确定地球或其他天体位置的方法。
天文导航的原理基于天体的固有属性和运行轨迹,通过观测和测量天体的位置和运动,可以确定导航者所处位置的方法。
本文将介绍天文导航的基本原理和其在实际应用中的具体场景。
2. 天文导航的基本原理天文导航的基本原理是利用天体的位置和运动来确定导航者所处位置的方法。
具体而言,天文导航依赖于以下几个关键要素:• 2.1 天体位置测量导航者需要准确地测量天体的位置。
这通常通过使用天文仪器如望远镜进行观测,并结合星表等工具来确定天体的准确位置。
• 2.2 天体运动测量天体的位置随时间变化,因此导航者需要测量天体的运动。
这可以通过观测天体在不同时刻的位置来实现,然后利用数学模型推算天体的运动轨迹。
• 2.3 天体运动模型为了准确地推算天体的位置和运动轨迹,导航者需要建立一定的天体运动模型。
这个模型可以基于天体的物理性质和行星力学原理来构建,并结合天文观测数据进行校准和验证。
• 2.4 导航计算方法最后,导航者需要利用测量到的天体位置和运动信息,结合天体运动模型,进行导航计算。
这个计算过程可以通过数学模型和算法来实现,以确定导航者所处的位置。
3. 天文导航的应用场景天文导航在实际应用中有广泛的应用场景。
以下列举了几个常见的应用场景:• 3.1 航空航天导航天文导航在航空航天领域有着重要的应用。
航空器和宇宙飞船可以通过测量天体的位置和运动来确定自身的位置,从而进行准确的导航和定位。
• 3.2 地理导航天文导航也可以应用于地理导航。
通过观测和测量地球上不同位置的天体,如太阳、北极星等,可以确定观测地点的经纬度等地理信息,从而实现导航和定位。
• 3.3 海上导航在海上航行中,天文导航可以帮助船舶准确地确定自身的位置。
通过测量太阳、月亮和恒星等天体的位置和运动,船舶可以使用天文仪器和导航工具确定自己的经度和纬度。
• 3.4 太空探索天文导航在太空探索中也具有重要的应用。
天文导航的原理及应用
天文导航的原理及应用1. 引言天文导航是一种利用天体进行导航的方法。
它基于天体的位置、轨道和光学特性来确定航向和位置。
天文导航在航海、航空、航天和地质勘探等领域有着广泛的应用。
2. 天文导航的原理天文导航的原理基于天体的观测和测量。
以下是几种常用的天文导航原理:2.1 天体定位通过观测天空中的星体,可以获得它们的位置和轨道信息。
根据已知星体的位置和轨道,可以计算出观测者所处的位置和航向。
2.2 天体测距利用视差原理和测距方法,可以通过测量天体在不同观测点的位置差异来计算观测者与天体的距离。
借助测距原理,可以确定观测者的位置。
2.3 天体引导天体引导是指利用天体的运动来确定观测者的航向。
参考星体的位置和运动特征,观测者可以通过调整航向,使得参考星体始终保持在某个特定的位置。
2.4 天体光学特性天体的光学特性可以提供导航信息。
例如,太阳的位置和亮度变化可以用于季节和时间的测量,而极光则可以用于确定地理位置。
3. 天文导航的应用天文导航在以下领域有着重要的应用:3.1 航海天文导航在航海中扮演着至关重要的角色。
通过观测太阳、星星、月亮等天体,并结合地平仪和天体测距仪等工具,船舶可以确定自己的位置和航向。
3.2 航空在航空领域,天文导航被广泛应用于仪表飞行。
飞行员可以通过观测星星、月亮和太阳等天体,辅之以无线电导航系统,准确确定飞机的位置和航向。
3.3 航天天文导航在航天探测任务中起着重要的作用。
航天器可以利用天体的引力和光学信息,确定自己的轨道和位置,从而进行精确的航天飞行和控制。
3.4 地质勘探天文导航也被应用于地质勘探中的导航和定位。
通过观测地球上的星体和太阳,地质勘探人员可以确定自己的位置和方向,从而进行地质勘察和地质调查。
4. 结论天文导航作为一种利用天体进行导航的方法,具有广泛的应用前景。
通过观测和测量天体的位置、轨道和光学特性,可以准确地确定观测者的位置和航向。
天文导航在航海、航空、航天和地质勘探等领域都发挥着重要的作用,为人类探索和发展提供了重要的帮助。
基于国产DSP的天文导航系统硬件设计
• 148•针对天文导航数据量大,处理速度要求高等特点,本文介绍了基于国产数字信号处理器FT-C6713/400的硬件设计方案,使用FPGA 及MCU 配合完成接口通信及星敏感器电机控制功能。
经测试,该系统能满足天文导航的需求,实现恒星目标的准确捕获及跟踪。
天文导航以空间位置已知、不可毁灭的自然天体作为导航信标,通过对天体的观测来确定飞行器的位置、航向和姿态等信息的导航技术。
具有隐蔽性好,工作稳定,定位、定向精度高,无累积误差等优点。
为了扩展天文导航定位技术的应用领域,天文导航设备目前正向体积小的嵌入式系统方向发展。
本文介绍了一种基于国产数字信号处理器(D S P )F T-C6713/400的天文导航系统硬件设计方案,DSP 是一种专门针对数字信号进行实时高速解算的特殊处理器,具有极强的处理性能、高度的灵活性和可编程性,同时外围集成了丰富的片上外设,可以方便的实现与外围设备的接口,缩小系统硬件平台的体积。
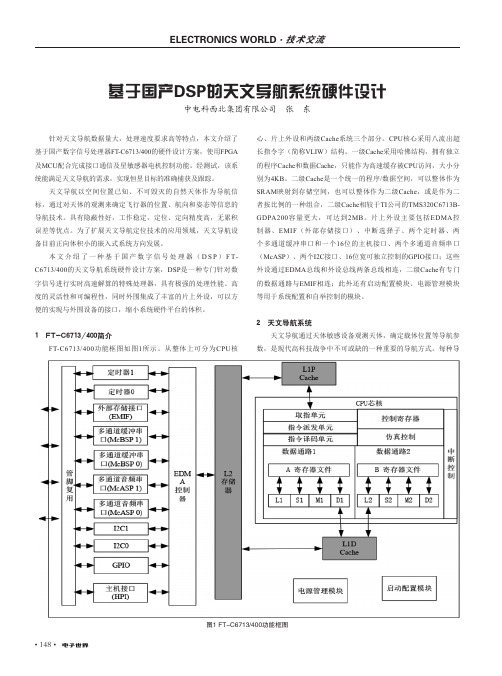
1 FT-C6713/400简介FT-C6713/400功能框图如图1所示。
从整体上可分为CPU 核心、片上外设和两级Cache 系统三个部分。
CPU 核心采用八流出超长指令字(简称VLIW )结构。
一级Cache 采用哈佛结构,拥有独立的程序Cache 和数据Cache ,只能作为高速缓存被CPU 访问,大小分别为4KB 。
二级Cache 是一个统一的程序/数据空间,可以整体作为SRAM 映射到存储空间,也可以整体作为二级Cache ,或是作为二者按比例的一种组合,二级Cache 相较于TI 公司的TMS320C6713B-GDPA200容量更大,可达到2MB 。
片上外设主要包括EDMA 控制器、EMIF (外部存储接口)、中断选择子、两个定时器、两个多通道缓冲串口和一个16位的主机接口、两个多通道音频串口(McASP )、两个I2C 接口、16位宽可独立控制的GPIO 接口;这些外设通过EDMA 总线和外设总线两条总线相连,二级Cache 有专门的数据通路与EMIF 相连;此外还有启动配置模块、电源管理模块等用于系统配置和自举控制的模块。
导航分系统介绍

A(φA,λA)
B( φB,λB)
M3(φ03,λ 03)
M1(φ01, λ01)
M2(φ02,λ02)
C(φC,λC)
三标方位法 8
2 地文导航(Terrestrial Navigation )
➢ 特点:这种导航简单、可靠;但受气象条件影响比较 严重,在能见度低的情况下很难测到目标,无法进行 导航。在无物标的大海、沙漠中利用这种方法导航也 很困难。
d dS d
K
W
B
S
22
1 1
d dScosK
dW dSsinK
d d W /c o s d d W c o d s ta n K c o d s
1 2d 1 2ta K n c do tsa K n 1 2sed c 11
3 推位导航(DR, Dead reckoning)
a dV dt
V ds dt
t
V
V0
adt
0
t
S
S0
Vdt
0
这种不依赖外界信息,只靠对载体(vehicle)本身的惯性测量来完
成导航任务的技术称作惯性导航。
14
4 惯性导航(INS-Inertial navigation )
用什么测量加速度大小?加速度计 ( accelerometer )
离距离分作别图为求出k点,和过cpkkN。点c b以作推方算位船线位的c垂为线基L准L,’就按是此天真文方船位位和
线。
30
6 天文导航(Celestial navigation )
天文导航的特点:
(1)天文导航系统是自主式系统,不需要地面设备; (2)不受人工或自然形成的电磁场的干扰; (3)不向外辐射电磁波,隐蔽性好;
组合导航技术的发展

EKF)对INS旳速度、位置、姿态以及传感器误差进 行最优估计,并根据估计成果对INS进行输出或者反 馈校正。
6、卫星导航与惯性导航组合方式(续)
松组合旳主要优点
4.3 脉冲星导航
➢ 脉冲星是太阳系以外旳遥远 天体,它们旳位置坐标,如 恒星星表一样构成一种高精 度惯性参照系;
➢ 脉冲星按一定频率发射稳定 旳脉冲信号,其长久稳定度 好于最稳定旳铯原子钟。
➢ 脉冲星能够提供绝好旳空间参照基准和时间基准,所以脉 冲星是空间飞行器旳极好旳天然导航信标。
4、天文导航(续)
系统旳容错功能。 ➢ 提升导航系统旳抗干扰能力,提升完好性。
6、卫星导航与惯性导航组合方式
6.1 涣散组合(Loosely-Coupled Integration)
松组合基本概念
➢ 松 组 合 又 称 级 联 Kalman 滤 波 (Cascaded Kalman Filter)方式。
➢ 观察量——INS和GNSS输出旳速度和位置信息旳差 值;
➢ 另外,因为没有GLONASS卫星旳精确轨道源数 据 , 故 无 法 测 定 精 度 。 与 GPS 相 比 这 是 GLONASS旳个一主要缺陷。
2、卫星导航旳发展即存在旳问题
2.2 卫星导航存在旳问题(续)
3)GALILEO存在旳主要问题
“伽利略计划”是由欧盟委员会和欧洲空间局共同发起并 组织实施旳欧洲民用卫星导航计划,它受多个国家政策 和利益旳制约,政策具有摇摆性。 因为欧盟受美国旳影响极大,“伽利略计划”本身旳独立 性值得怀疑; GALILEO计划目前已经延后,考虑到目前旳金融危机 ,未来旳GALILEO怎样发呈现在还看不清楚。
导航技术

无线电导航:(radio navigation)天文导航(celestial navigation)惯性导航(Inertial Navigation)其他导航:红外激光电视雷达制导等卫星导航(Satellite Navigation)导航分类导航是一个技术门类的总称,它是引导飞机、船舶、车辆以及个人(总称作运载体)安全、准确地沿着选定的路线,准时到达目的地的一种手段。
导航的基本功能是回答:我现在在哪里?我要去哪里?如何去?无线电导航主要利用电磁波传播的基本特性:电磁波在在均匀理想媒质中,沿直线(或最短路径)传播;电磁波在自由空间的传播速度是恒定的;电磁波在传播路线上遇到障碍物或在不连续媒质的界面上时会发生反射。
通过导航台对无线电波的接收、发射和处理,能测量出所在载体相对于导航台的方向、距离、距离差、速度等导航参量(几何参量)z通过测量无线电导航台发射信号(无线电电磁波)的时间、相位、幅度、频率参量,可确定运动载体相对于导航台的方位、距离和距离差等几何参量,从而确定运动载体与导航台之间的相对位置关系,实现对运动载体的定位和导航。
z优点:不受时间、天气限制,精度高,作用距离远方,定位时间短,设备简单可靠;z缺点:必须辐射和接收无线电波而易被发现和干扰,需要载体外的导航台支持,一旦导航台失效,与之对应的导航设备无法使用;同时易发生故障.无线电导航天文导航经常与惯性导航、多普勒导航系统组成组合导航系统。
这种组合式导航系统有很高的导航精度,适用于大型高空远程飞机和战略导弹的导航。
在低空飞行时因受能见度的限制较少采用天文导航,但对于高空远程轰炸机、运输机和侦察机作跨越海洋、通过极地、沙漠上空的飞行,天文导航则很适用。
根据天体来测定飞行器位置和航向的航行技术。
天体的坐标位置和它的运动规律是已知的,测量天体相对于飞行器参考基准面的高度角和方位角就可以计算出飞行器的位置和航向。
天文导航系统是自主式系统,不需要地面设备,不受人工或自然形成的电磁场的干扰,不向外辐射电磁波,隐蔽性好,定向、定位精度高,定位误差与时间无关,因而天文导航得到广泛应用。
一种姿态机动辅助下的天文导航系统偏差自校准方法
21 年 1 00 月
宇 航 学 报
J u n lo to a tc o r a fAsrn uis
Vo . 131
No. 1
J n ay 2 1 a u r 0 0
一
种 姿 态 机 动 辅 助 下 的天 文 导 航 系统 偏 差 自校 准方 法
除 系 统 误 差 对 自主 导 航 精 度 的 影 响 , 出 了 一种 姿 态 机 动 辅 助 下 的偏 差 自校 准 导 航 滤 波 方 法 , 以紫 外 地 球 敏 感 提 并 器 测 量 偏 差 为 例 , 计 了 导航 滤 波 算 法 。数 学仿 真 和 半 物 理仿 真 结 果 表 明 , 方 法 能显 著地 提 高 自主 导航 精 度 。 设 该 关 键 词 : 自主 导 航 ;紫 外 敏 感 器 ; 自校 准 滤 波 中图 分 类 号 :V 4 .2 29 3 文 献 标 识 码 :A 文章 编 号 :10—38 2 1 )1 030 0012 (000 . 9—5 0
导航 方法 , 针对 成 像 型地 球 敏 感 器测 量 偏 差 设 计 了 自校 准滤 波算法 , 并通 过 数 学 仿 真 对方 法 的有 效 性
收 稿 日期 :091.4 修 回 日期 :091-1 20 —01; 20 .1 0
9 4
宇航 学 报
第 3 卷 1
W t ]=0 E[ t W ( ) () , W( ) t ]= Q( ) ( ) t 2 卫 星轨道 动力 学 模 型 中除 中心 引 力项 外 , 考 仅 虑 。 项摄 动 , 引力加 速度 的分量形 式为 :
度、 描述 被测 目标相 关特 性 的模 型 精度 、 导航 算法 等
1 基 于 紫外敏 感器 和星 敏 感器 的 自主 导航
无人机结构与系统课件:组合导航系统
利用多种导航卫星信号有利于误差补偿提高导航定位的精 度和可靠性。
► 系统误差——轨道系统误差、卫星钟差、多路径误 差…;
► 随机误差——信号随机误差、轨道随机误差、钟差随 机误差…;
► 有色噪声——太阳光压、随时间变化的钟差…; ► 异常误差——周跳、变轨误差…。
➢ 此外,因为没有GLONASS卫星的精确轨道源数据, 故无法测定精度。与GPS相比这是GLONASS的个一 主要缺陷。
3)GALILEO存在的主要问题
➢ “伽利略计划”是由欧盟委员会和欧洲空间局共同发起并 组织实施的欧洲民用卫星导航计划,它受多个国家政策和 利益的制约,政策具有摇摆性。
➢ 由于欧盟受美国的影响极大,“伽利略计划”本身的独立 性值得怀疑;
的容错功能。 ➢ 提高导航系统的抗干扰能力,提高完好性。
(4)多传感器组合导航系统
多传感器组合导航系统是指传感器数目多于两个的组合导 航系统,GPS/INS/Loran-C、GPS/Glonass/INS、 GPS/JTIDS/INS等都是实用的例子。在不少应用场合 传感器数目可能大于等于4个,例如GPS/INS/ DNS/Loran-C和GPS/INS/JTIDS/TAN/SAR等。 优点: • 实时性好、容错性强和精度高。 • 未来发展趋势。
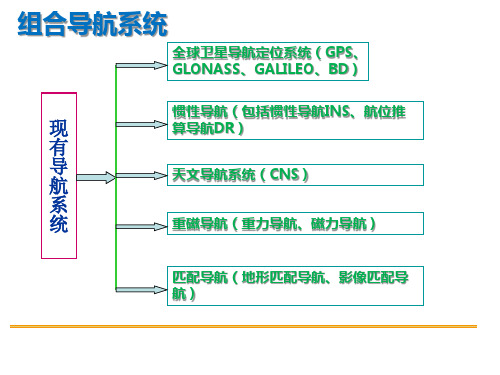
组合导航系统
全球卫星导航定位系统(GPS、 GLONASS、GALILEO、BD)
惯性导航(包括惯性导航INS、航位推
现
算导航DR)
有
导 航
天文导航系统(CNS)
系
统
重磁导航(重力导航、磁力导航)
匹配导航(地形匹配导航、影像匹配导 航)
1.卫星导航存在的问题
1)美国GPS可能存在问题
低轨地球卫星自主天文导航基本原理
低轨地球卫星自主天文导航基本原理
一、简介
低轨地球卫星自主天文导航是基于太阳、月亮和星空的恒星导航系统,主要用于水陆空多种运动目标的定位、导航、控制、精确跟踪、跟踪控制。
它与GPS、北斗、GLONASS等卫星定位导航系统相比,具有安全可靠、开
放共享的特点,使用成本低,能够满足航空、海洋、军事等高精度定位、
导航、控制等要求。
二、原理
低轨地球卫星自主天文导航系统主要由控制系统及本地仪器组成,其
中本地仪器负责接收星空信号,并根据观测结果,计算出天文点位置、航向、距离、速度等数据,并实时反馈给控制系统;控制系统则负责处理本
地仪器反馈的数据,并将其输入到相关的导航软件中,以实现对运动目标
的定位、导航和控制。
三、优势
1.安全可靠:低轨地球卫星自主天文导航系统使用天文恒星作为参照,不受地球电磁波的干扰,因此,安全可靠,适应环境广,可以在任何地点
使用。
2.开放共享:低轨地球卫星自主天文导航系统无需购买任何类型的设备,只需安装天文恒星软件。
天文导航基础(一)
因此菲尔德和彼得堡之间的大圆弧航线(黄色弧)距离是4318个海里,该 航线所需的时间为4318/500=8.636h=8h38m。
角的余弦公式
1 cos (A) = - cos(B)cos(C) + sin(B)sin(C)cos(a) 2 cos (B) = - cos(A)cos(C) + sin(A)sin(C)cos(b) 3 cos (C) = - cos(A)cos(B) + sin(A)sin(B)cos(c)
典型自主导航系统定位精度比较(根据 Frank Tai,Peter D.Noerdlinger)
1.5天文导航的发展现状及应用
• 天文导航系统的体系结构 • 天文导航在不同平台的应用
• 射电天文导航技术的应用
• 水平基准的发展现状
• 世界军事大国对天文导航技术的认识
1.6现代天文导航的发展的关键技术
s3 A1
A2
s1 s2
S2
S1
90 A1
90
90 A2
90 S3
2.1球面三角
导航三角形
导航三角形(通常是
90 Dec
GP
N
LHA
指斜三角形)是地球表面
上由北极N,观测者假定 位置AP,天体投影点GP构 成的球面三角形。所有的 天文导航都是在导航三角
赤道
90 LATAPDec来自天文导航基础第一章
绪
论
第一章 绪论
主要内容
• • • • • • 1.1天文导航概念 1.2课程的目的、意义 1.3天文导航的特点 1.4天文导航发展简史 1.5天文导航的发展及应用 1.6天文导航的关键技术
第一章 绪论
1.1 什么是天文导航?
【国家自然科学基金】_天文导航系统_基金支持热词逐年推荐_【万方软件创新助手】_20140802
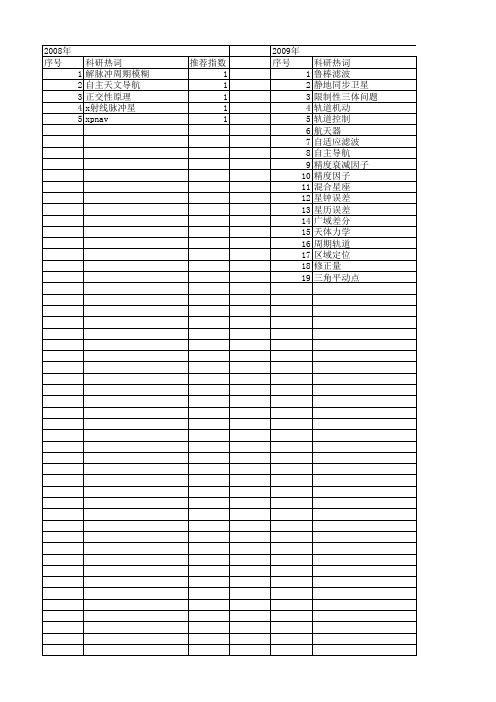
2011年 科研热词 脉冲星 天文导航 遥测接收机 质心提取 计时观测 解调 虚拟无线电 自主导航 自主定位 自主天文导航 组合模式 组合导航 空间碎片 相位模糊度 满二叉树 深组合 有效圆边缘点检测 月球车天文导航 月球车 时延 数字信号处理 捷联惯导 惯性导航系统 惯性/天文组合导航 导航 姿态组合 太阳图像 天文观测 天文导航系统 圆拟合法 同步轨道卫星 同步 卫星激光测距 千赫兹白天测距 加性四元数 zernike矩 xpnav ekf 推荐指数 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
科研热词 组合导航 精度分析 星敏感器 天文导航 卡尔曼滤波 鲁棒滤波 高超声速飞行器 误差角组合 误差补偿 角度观测 观测值 螺旋矢量 自主定轨 联邦滤波 红外地平仪 空天飞行器 移动通信 照相天体测量 煤矿通信 激光测距 极大似然估计 星间定向观测 星体跟踪器 时间,方法 时间 无线频段 无线电设备 方法 整平 数据分析,技术 数据分析 捷联惯导 抗差估计 扩展卡尔曼滤波 惯性导航系统 惯性/天文组合导航 平动点 导航星座 对偶四元数 安装误差标定 天文定位 天体测量学 半物理仿真 加性误差 其它诸多方面 位置+方位修正 二维倾角传感器 sins/gps/cns kalman滤波 halo轨道
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 32 43 44 45 46 47 48 49 50
船用天文导航设备的导航精度与准确性评估
船用天文导航设备的导航精度与准确性评估在航海领域中,天文导航一直是一项重要的技术,用于帮助船舶确定自身的位置和航向。
船用天文导航设备是通过观测天体的位置和方向,结合船上的导航仪器,来进行航行导航的一种方式。
但是,对于这种导航方式的准确性和精度评估,一直是重要的研究课题。
导航精度和准确性是评估船用天文导航设备效果的重要指标。
导航精度是指导航设备所测量的位置与实际位置之间的偏差。
准确性则是指导航设备所测量的位置与真实位置之间的误差。
评估这两个指标的方法一般包括实验验证和数学分析。
在实验验证方面,可以通过在真实航行中使用船用天文导航设备,并与其他导航方式进行对比,来评估其导航精度和准确性。
在这种实验中,船舶的位置和航向是通过卫星导航系统(如GPS)来测量的,并且与天文导航结果进行对比。
通过比较两者的偏差和误差,可以得出船用天文导航设备的导航精度和准确性。
数学分析是另一种评估船用天文导航设备导航精度和准确性的方法。
在这种方法中,需要考虑观测误差、定位精度、天体位置精度等多个因素,并通过数学模型来计算导航结果的准确性。
这种评估方法需要准确的数学知识和分析技巧,并且需要大量的观测数据和实验结果作为基础。
在船用天文导航设备的导航精度和准确性评估中,还需要考虑到其他一些因素。
首先是观测条件的影响。
观测天体的条件可能会受到天气、亮度、船舶姿态等因素的影响,这些因素都会对导航结果产生一定的影响。
其次是设备本身的性能和精度。
不同的设备具有不同的特点和性能,这也会对导航结果产生一定的影响。
因此,在评估导航精度和准确性时,需要综合考虑这些因素。
船用天文导航设备的导航精度和准确性评估对于航海安全和航行效率具有重要意义。
准确的导航结果可以帮助船舶在海上确定准确的位置和航向,进而避免潜在的危险和减少航行时间。
因此,船用天文导航设备的导航精度和准确性评估的研究工作具有重要的现实意义和应用价值。
总结而言,船用天文导航设备的导航精度和准确性评估是一项重要的研究工作。
天文导航系统

3
2天文导航的分类源自分 类 一按照峰值光谱和光谱范围进 行分类: 1、星光导航:观测天体的 可见光进行导航 2、射电天文导航:接收天 体辐射的射电信号(不可见 光)进行导航
分 类 二
按照跟踪的星体数目进行分类: 1、单星导航:航向基准误差 大而定位精度低 2、双星导航:两颗星体的方 位角差越接近90°,定位精度 越高 3、三星导航:用来确定航天 器在三维空间中的位置
7
4
天文导航发展趋势
高精度定位定向 全天候导航 自动化导航
探讨不用垂线基准或采用 粗略垂线基准进行精确天 文定位的新导航方法,发 展小型化高精度垂直陀螺 仪,加强天文导航中信息 融合理论的应用研究等, 对提高天文导航精度具有 重要意义。
射电天文导航要解决的 关键技术主要包括:研 究和发现新的射电源; 研制小型化及高灵敏度 接收天线;射电源中心 确认技术和红外天文探 测技术等。
天文导航以其定向精度高、 可靠性好及稳定性优越的 特点,被广泛地应用于军 事领域。
二战前,天文定位是主要的导航手段, 几乎全部战船都配备各种天文仪表、天 文钟和手持航海六分仪。二战后,潜艇 用的天文导航也发展起来了。同时,各 种大型水面舰艇使用的星体跟踪器也不 断取得技术突破。
6
3
天文导航在军事上的应用
4
2
天文导航的优点
天文导航建立在天体惯性系框架基础之上,具有直接、自然、可靠、精确 等优点,拥有无线电导航无法比拟的独特优越性。
天文导航的天体敏感器

23/104
2.3.1恒星敏感器简介 ——恒星敏感器性能要求
④抗干扰、抗空间辐射能力强。 • 恒星敏感器敏感微弱星光信息,杂散光的干扰不但对成像 质量影响很大,甚至会使星敏感器不能正常工作,因此必 须采用遮光罩来抑制杂散光,增强抗干扰能力。 • 通常面向空间应用的仪器必须具有抗辐射能力,恒星敏感 器也不例外。
天文与深空导航学
主讲:魏二虎 教授
1/104
目录
第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 天文与深空导航的理论基础 天文导航的天体敏感器 高轨地球卫星自主天文导航 深空探测器的自主天文导航原理与方法 VLBI技术用于深空探测器导航的原理与方法 USB技术用于深空探测器导航的原理与方法 脉冲星测量技术用于深空探测器自主导航的原 理与方法 其他导航技术在深空探测中应用与国内外深空 探测计划
16/104
2.3.1恒星敏感器简介
• 恒星敏感器(简称星敏感器)是当前广泛应用的天体敏感器, 它是天文导航系统中一个很重要的组成部分。 • 它以恒星作为姿态测量的参考源,可输出恒星在星敏感器 坐标下的矢量方向,为航天器的姿态控制和天文导航系统 提供高精度测量数据。
17/104
2.3.1恒星敏感器简介
恒 星 敏 感 器
太 阳 敏 感 器
行 星 敏 感 器
雷 达 成 像 敏 感 器
光 学 成 像 敏 感 器
微 波 雷 达
激 光 雷 达
陀 螺
加 速 度 计
倾 角 传 感 器
15/104
2.3恒星敏感器
2.3 恒星敏感器 2.3.1 恒星敏感器简介 2.3.2恒星敏感器分类 2.3.3恒星敏感器结构 2.3.4恒星敏感器的工作原理
航空航天工程师的航天器通信和导航系统
航空航天工程师的航天器通信和导航系统航空航天工程师是一门充满挑战的职业,他们致力于设计和构建航空航天器,其中一个重要的领域是航天器通信和导航系统。
本文将重点探讨航空航天工程师在航天器通信和导航系统方面的工作。
一、航天器通信系统的设计与开发航天器通信系统是确保航天器与地面控制中心之间进行可靠和高效通信的关键组成部分。
航空航天工程师将使用尖端技术和创新的思维来设计和开发这些系统。
1. 信号传输与处理航空航天工程师负责设计有效的信号传输和处理方法,以确保航天器与地面之间的数据传输准确无误。
他们使用激光通信、无线电波和卫星通信等技术,将传感器数据、导航信息和通信信号传输到地面控制中心。
2. 信号强度和频率管理航天器通信系统需要处理各种环境条件下的信号强度和频率管理。
航空航天工程师负责设计和开发系统,以保持信号的稳定和可用性,即使在面临干扰或其他不利情况下,也能保持通信的无缝连接。
3. 数据安全与隐私保护航天器通信系统中的数据安全和隐私保护至关重要。
航空航天工程师致力于开发加密和认证技术,以确保敏感信息的安全传输,并保护航天器免受黑客攻击和未经授权的访问。
二、航天器导航系统的研究与应用航天器导航系统用于确保航天器在任何时候都能够准确地确定自身位置和方向,为导航任务提供支持。
航空航天工程师在以下方面进行研究和应用:1. 惯性导航系统惯性导航系统基于航天器内部传感器来测量和跟踪航行状态。
航空航天工程师负责设计高精度和稳定的惯性导航系统,以确保航天器在没有外部引导的情况下仍能准确导航。
2. 卫星导航系统全球定位系统(GPS)和其他卫星导航系统为航天器提供了准确的位置和时间信息。
航空航天工程师研究和应用卫星导航系统,以确保航天器在航行过程中始终具备可靠的导航性能。
3. 天文导航系统天文导航系统利用星体和其他天文观测指标来确定航天器的位置和方向。
航空航天工程师通过研究天文学理论和应用先进的天文测量仪器,开发出高精度的天文导航系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
天文导航系统一、天文导航的定义与分类天文导航系统是利用对自然天体的测量来确定自身位置和航向的导航技术。
由于天体位置是已知的,测量天体相对于导航用户参考基准面的高度角和方位角就可计算出用户的位置和航向。
天文导航系统不需要其他地面设备的支持,所以是自主式导航系统。
不受人工或自然形成的电磁场的干扰,不向外辐射电磁波,隐蔽性好,定位、定向的精度比较高,定位误差与定位时刻无关,因而得到广泛应用。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
天文导航系统的分类:按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。
二、天文导航的优点天文导航建立在天体惯性系框架基础之上,具有直接、自然、可靠、精确等优点,拥有无线电导航无法比拟的独特优越性。
(1 )自主性强,无误差积累。
天文导航以天体作为导航基准,被动地接收天体自身辐射信号,进而获取导航信息,是一种完全自主的导航方式,而且其定位误差和航向误差不随时间的增加而积累,也不会因航行距离的增大而增大。
(2 )隐蔽性好,可靠性高。
作为天文导航基准的天体,其空间运动规律不受人为破坏,不怕外界电磁波的干扰,具有安全、隐蔽、生命力强等特点,从根本上保证了天文导航系统最完备的可靠性。
现代战争对制信息权的争夺,使战场电磁环境十分复杂,当敌方实施强力无线电干扰,使卫星导航等无线电导航系统无法正常工作时,启用天文导航,对于保证己方的战略核打击威力及战斗优势,具有重要意义。
3)适用范围大,发展空间广。
天文导航不受地域、空域和时域的限制,是一种在整个宇宙内处处适用的导航技术,发展空间极其广阔。
技术成熟后可实现全球、昼夜、全天侯、全自动天文导航。
(4 )设备简单,便于推广应用。
天文导航不需要设立陆基台站,更不必向空中发射轨道运行体,设备简单,工作可靠,不受别人制约,便于建成独立自主的导航体制。
在战争情况下将是一种难得的精确导航定位与校准手段。
(5 )导航过程时间短,定向精度最高。
天文导航完成一次定位、定向过程只需1 ~2min,当采用光电自动瞄准定向时,只需15s 而且天文导航在所有导航系统中定向精度最高。
不仅能够为未来战场武器系统提供精确实时的航向和惯导校正信息,而且可作为未来空天高速飞行器的导航保障手段之一。
三、天文导航在军事上的应用天文导航以其定向精度高、可靠性好及稳定性优越的特点,被广泛地应用于军事领域。
从一般的航海六分仪到自动的星体跟踪器,到潜艇专用的天文导航潜望镜定位系统,又到飞机、导弹的天文定位系统,进而到卫星与航天飞机的星体跟踪器与空间六分仪。
天文导航不仅能够独立地为运载体提供航向、位置信息,而且还可用于航空航天和航海领域对惯导系统的定位误差校正。
(1)潜艇舰船的天文导航。
二战前,天文定位是主要的导航手段,几乎全部战船都配备各种天文仪表、天文钟和手持航海六分仪。
二战后,潜艇用的天文导航也发展起来了。
同时,各种大型水面舰艇使用的星体跟踪器也不断取得技术突破。
1990年美国海空发展中心、诺思罗普公司联合推出了新一代星光—惯性捷联式组合导航系统,采用全息多焦点广角透镜和C C D 焦平面阵列实现了星体昼夜观测定位。
稍后,美国波尔光电公司,也研制出新型C C D 昼夜星体跟踪系统,白天测+2.5 等星,夜间测+3.5 等星,精度达5 角秒。
前苏联列宁格勒国立光学机械厂研制并装备G 级弹道导弹核潜艇的1 2 M 天文导航潜望镜定位精度为0.9 海里,航向精度6〜7角分。
在“台风”级、D-皿级、阿尔法级和维克托-皿级等型核潜艇上也装备有天文定位系统,在M 级战略导弹核潜艇和Y 级核动力潜艇上装有较先进的“鳕眼”星光—射电组合导航系统。
前苏联在其靶场测量船上安装的光学自动定向仪,采用光电倍增管作为星体敏感元件,高度轴和方位轴的检测精度为6 角秒,白天测+2.0 等星,夜间测+3.5 等星。
1993 年下水的法国建造的凯旋级弹道导弹核潜艇上装有M92 型光电潜望镜(六分仪)。
俄罗斯航空母舰的导航设备中,除无线电导航设备外,与惯导组合的天文导航设备有:两套光学自动定向仪(即星体跟踪器)和一套无线电六分仪,以及一套天文校正用的计算机系统。
(2)空天武器的天文导航。
随着天文导航技术的不断发展提高,其应用范围也从航海扩展到航空航天。
天文导航现已应用于远程飞机导航、弹道导弹制导和航天飞机导航,将来也将应用于空天飞机等新一代航天武器导航中。
美国B 5 2 远程轰炸机上装有M D - 1 天文自动罗盘,在B 5 7 远程轰炸机上装有光电六分仪K S - 8 5 ,高度观测范围为5°〜70°,观测精度为4'方位精度为0.3°。
1 9 7 0 年美国在超音速运输机上装备天文- 惯性-多普勒组合导航系统。
后来研制的N A S - 2 6 型天文- 惯性组合导航系统安装在B 2 轰炸机等先进战机上。
1965 年美国首先将星光/ 惯性制导用于三叉戟导弹上,射程增加到7400km,命中精度提高到0.37km前苏联也将天文/惯性制导设备用于SS-N-8 导弹上,大大提高了命中精度。
如今,天文制导已是各种导弹、精确制导炸弹必不可少的制导方式之一。
卫星和宇宙飞船等航天器利用其上安装的星体敏感器、红外地平仪和空间六分仪等设备来实现天文导航, 保障飞行。
深空探测航天器的自主导航系统更加离不开天文导航。
因为在星际航行时, 无线电导航和G P S 都无法使用, 只能依靠天文导航或惯性导航, G P S 只用于深空探测航天器近地段的导航。
虽然地面站遥测是精度最高、应用最广的深空探测器的导航方法,但它不能自主,必须依赖地面站的支持,必须保证可靠的无线电通信能力。
一旦当地面台站发生阻塞就无法完成导航任务。
而且探测器上必须装备复杂、昂贵的测控和通信设备,增加了任务成本。
目前基于电荷耦合器件(CCD )的高精度星体跟踪器可达到角秒级精度, 这使得天文导航系统在航天器自主定轨方面得到进一步的发展。
天文导航经常与惯性导航、多普勒导航系统组成组合导航系统。
这种组合式导航系统有很高的导航精度, 适用于大型高空远程飞机和战略导弹的导航。
把星体跟踪器固定在惯性平台上并组成天文-惯性导航系统时, 可为惯性导航系统的状态提供最优估计和进行补偿, 从而使得一个中等精度和低成本的惯性导航系统能够输出高精度的导航参数四、天文导航的发展趋势1.天文导航技术发展趋势天文导航技术总体发展趋势是提高定位定向精度与导航定位的自动化、智能化水平,实现昼夜导航、全天侯导航和全球导航。
(1)高精度定位定向。
目前的天文导航方法是以当地垂线为基准测量天体的天顶距而进行定位的。
定位精度主要取决于垂线基准精度和天文仪器测量精度(含轴角测量和星体检测精度)。
探讨不用垂线基准或采用粗略垂线基准进行精确天文定位的新导航方法,发展小型化高精度垂直陀螺仪,加强天文导航中信息融合理论的应用研究等,对提高天文导航精度具有重要意义。
(2)昼夜导航。
实现昼夜连续的天文导航定位,具有十分重要的军事意义。
被测星体的星光通过光学系统后被聚焦在靶面上的星像是直径不大于0 . 0 5 m m 的光点。
只要靶面上的星像照度大于星像传感器的阀值,便可检测到星体。
夜间测星是易于做到的。
而白天由于阳光透过大气层时的散射与折射,使天空背景变得很亮,星光难以检测。
因此从明亮的天空背景中检测比较弱的星体信号是实现昼夜天文导航的关键技术。
此外,高质量成像技术、高精度复合控制技术、不同峰值光谱的星光检测技术、昼夜星光自动跟踪技术等也是实现昼夜导航应发展的重点。
(3)全天候导航。
不良天气条件下的星光检测技术研究是实现全天侯天文导航的关键。
射电天文导航要解决的关键技术主要包括:研究和发现新的射电源;研制小型化及高灵敏度接收天线;射电源中心确认技术和红外天文探测技术等。
(4)自动化导航。
自动化的天文导航主要需要解决对星体的自动捕获、自动跟踪、自动检测;定位定向自动解算,其技术难点是自动捕获跟踪星体与自动检测星体。
目前,自动捕获跟踪星体的数学模型已经建立,关键是提高跟踪精度以减小星像在视场中的抖动。
2.组合导航各种导航系统都有各自的优缺点,它们的基本原理决定了它们中的任何一种都不可能取代其他导航系统而独占导航领域。
为了使它们扬长避短,优势互补,因此出现了组合导航系统的概念。
组合导航系统不是各种导航系统的简单集合,它是把参与组合的惯性导航、天文导航、卫星导航(G P S)、无线电导航等各种导航设备通过中心计算机形成一个有机整体,采用综合数据处理与信息融合技术,通过误差校正,得到导航定位信息的优化值;利用故障自动检测和软件控制,实现不同工作方式的自动转换。
当某一设备发生故障时,系统可自动判断并立即转到另一工作方式,以保证导航不中断,从而提高了系统可靠性。
“天文/ 惯性”或“天文/ 惯性/ 卫星”组合导航系统是目前天文导航与其它导航进行组合的主要形式。
在组合导航系统中,天文导航的作用相当于校正仪器。
利用天文导航或卫星导航误差有界性(收敛性)的特点来克服惯导误差随时间发散的缺点。
惯导系统获得校准信号后,除了修正掉已经积累的误差外,还有助于惯导计算机分析出陀螺仪和加速度计的零点漂移误差,有助于提高惯导系统自身短时导航精度。
在天文/ 惯性/ 卫星组合导航系统中,惯导能提供运载体精确的经纬度、水平基准与三维速度,以及横摇、纵摇、翻滚等姿态信息,但它的误差随时间积累;天文导航隐蔽性好,自主性强,定向精度高,然而易受天气和低空限制。
卫星导航系统(G P S )则是全球、全天候、连续、实时、高精度的导航定位系统,但其频带窄,载体在做较高机动时容易丢失信号,导航信息受制于人且数据率较低。