一种远距离自动报靶方法和装置
一种自动报靶装置[实用新型专利]
![一种自动报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/daf0ff5e65ce050877321377.png)
专利名称:一种自动报靶装置专利类型:实用新型专利
发明人:李允水
申请号:CN201020221147.0申请日:20100601
公开号:CN201697560U
公开日:
20110105
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种自动报靶装置,包括靶板、靶杆、靶机、护板和数据同步显示屏,其中,靶机的两侧设置有倒伏传动轴,靶板下端固定设置有靶杆,靶板周边可以进一步设置有靶框,靶机内进一步设置有信号发射模块、控制模块和数据采集模块,数据同步显示屏上进一步设置有语音模块、信号接收模块和显示模块;靶机上进一步设置有4个传感器,各传感器位于同一水平面上,且呈三角形分布。
位于三角形两个底角位置的两个传感器,其与三角形底边的夹角为15-75度,优选为45度;护板包括橡胶板、钢板和立柱,护板位于靶机的前方。
本实用新型结构简单,使用方便,报靶准确,统计效率高,利于射击训练。
申请人:李允水
地址:266100 山东省青岛市崂山区枣山东路39号
国籍:CN
更多信息请下载全文后查看。
一种无线远、近距离射击视频报靶装置[实用新型专利]
![一种无线远、近距离射击视频报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/5007266dec3a87c24028c4f6.png)
专利名称:一种无线远、近距离射击视频报靶装置专利类型:实用新型专利
发明人:习开东
申请号:CN200620079794.6
申请日:20060914
公开号:CN200962018Y
公开日:
20071017
专利内容由知识产权出版社提供
摘要:本实用新型涉及无线远、近距离射击视频报靶装置。
可调三脚支架与高倍数远视望远镜连接,高像素彩色或黑白摄像机的摄像镜头与远视望远镜的观察后镜头相连,射击靶的射击信号是由光信号传递给高倍数远视望远镜的观察前镜头,高像素彩色或黑白摄像机的图像信号与图像处理显示器连接。
结构简单,使用方便、适用于新型多元化室内外靶场的远、近距离视频报靶。
克服了图像显示器有线传输、野外靶场不易安装的缺陷,保证了摄像机的安全,不受天气环境的影响。
给射击者带来了很大方便,提高了训练效率。
远、近视距为15m-3000m,广泛应用于警察、军队、民兵、射击俱乐部等单位射击使用。
具有一定的社会和经济效益。
申请人:习开东
地址:710075 陕西省西安市碑林区建设西路169号西藏办事处西楼
国籍:CN
代理机构:西安西达专利代理有限责任公司
代理人:刘华
更多信息请下载全文后查看。
自动报靶方法与设备
自动报靶方法与设备一、背景:目前, 在部队射击训练、考核和比赛中, 示靶、检靶和成绩记录主要依靠人工完成, 这样不但效率低、可靠性差, 而且存在安全隐患【1】。
因而在很大程度上影响报靶的结果,不仅判靶效率低,而且不利于射击者准确地了解自己的成绩,不利于打靶水平的提高。
射击精度是衡量枪械类轻武器性能的一个重要指标,因此,对自动报靶方法与系统的研究具有非常重大的意义。
二、自动报靶的分类:为适应科技强军的需要,国内有许多单位对自动报靶系统进行研究,相继开发出多类射击自动报靶系统。
根据自动报靶的技术实现原理,可分为电极埋入方式、光电传感方式、图象处理方式和声电定位方式四种方式。
另外,市售的自动报靶系统根据检测手段可分为:金属片(或其他导电体)连通检测和图像识别两种方式。
1、电极埋入式自动报靶系统1.1电极埋入式自动报靶系统的工作原理工作原理:是在特制靶体的生产过程中,利用特殊的工艺,将一个由电极组成的二维网格埋入靶体的夹层里面。
当在垂直和水平方向上,每两根电极之间的间隔小于弹丸直径时,每次弹丸击穿靶体都会切断至少两根的电极。
通过测量不同编号的电极间电阻值变化就能确定弹丸击中靶体的位置,进而形成弹点坐标,判定环数。
1.2电极埋入式自动报靶系统的优缺点:①优点:响应速度快;报靶精度高。
②缺点:这种判靶方式是一次性的,每次射击后靶体即告报废。
因此,电极埋入式报靶系统成本过高。
2、光电传感方式自动报靶系统2.1光电传感方式自动报靶系统的工作原理:是在光电传感式自动报靶系统中,在靶体的四周以垂直方向和水平方向对应安装两套高灵敏度的光电收发装置(如发光二极管和感光二极管)。
这两组排列密集的发光器件所发出的光线将靶划分为矩阵式的网格状。
每个小网格对应着靶上的一个方形区域。
每一组垂直方向和水平方向光电器件编号的组合,就是靶上对应点的坐标。
在每组相邻的光电器件间距小于弹丸直径的情况下,每次弹丸通过靶体的瞬间,都会在垂直方向和水平方向上切断至少两根的光线,光线的明暗变化又使感光器件的电气参数(如输出电平)发生变化。
自动报靶装置[实用新型专利]
![自动报靶装置[实用新型专利]](https://img.taocdn.com/s3/m/c3ae1df459eef8c75ebfb3b0.png)
专利名称:自动报靶装置
专利类型:实用新型专利
发明人:朱德晓,朱德万,张娉申请号:CN200820301059.4申请日:20080605
公开号:CN201242401Y
公开日:
20090520
专利内容由知识产权出版社提供
摘要:本实用新型所涉及一种自动报靶装置,包括控制终端和靶标,靶标主要由导电底板和靶面构成,靶面包括若干块相互隔离的靶区,控制终端根据脉冲信号发生在哪一块靶区与导电底板之间来判断命中环数,进行实时报靶。
所述靶面包括沿圆周方和径向分割成的若干个相互隔离的靶区,导电底板向后延伸出若干个止档杆,止档杆的同侧间隔的固定有两个绝缘空心环,这两个空心环恰好能够使每个靶区上固定的垂直于靶面的支杆穿入,位于两个空心环间的支杆上还套有一回位弹簧,在止档杆的顶端还连有一在靶区受力下压时能够与支杆顶端接触的接触头。
申请人:朱德晓
地址:541004 广西壮族自治区桂林市桂林电子科技大学尧山校区B121
国籍:CN
代理机构:桂林市持衡专利商标事务所有限公司
代理人:廖世传
更多信息请下载全文后查看。
一种远距离自动报靶方法和装置
说明书摘要一种轻武器射击自动报靶的方法和装置,所述的方法包括:图像采集,弹孔识别,成绩判别,结果输出。
在弹孔识别步骤,本发明设计了快速的局部图像曲面特性分析方法,能够有效的去除复杂环境下图像变化检测结果中的大量噪声,并通过进一步时域分析的方法确认最终弹孔;在结果输出步骤,提供真实靶显示和模拟靶显示两种途径,通过模拟靶技术,可以在提高用户体验的同时,有效的节省成本。
所述的装置包括:多个长焦镜头和CCD摄像机,图像处理工控机,用于控制和显示的触摸屏。
本发明对于环境具有良好的适应性,即使在比较恶劣的天气,比如大风,有雾,低照度等情况下,仍具有良好的性能。
权利要求书1,一种轻武器射击自动报靶的方法和装置,其特征在于包括如下步骤:步骤S1:用户通过触摸屏选择靶车位置,装置控制靶车到达指定距离,同时选择对应距离的长焦镜头和CCD摄像机将采集到的靶面图像通过采集卡传输的图像处理工控机。
步骤S2:融合图像变化检测,图像局部曲面特征分析以及时域分析三种方法进行弹孔检测。
步骤S21:首先通过一个三点算法对靶面倾斜以及抖动情况进行计算,将输入图像进行校正和对准。
通过将当前输入图像与在线更新的靶面历史图像进行比较,获取发生变化的部分。
步骤S22:通过对图像的局部曲面特征进行分析,将图像分割为弹孔区域和非弹孔区域。
步骤S23:利用时域信息对初步检测到的弹孔进行验证,增加弹孔检测的准确性。
步骤S3:通过提取的环线信息,弹孔位置和尺寸计算射击成绩,成绩包括环数和方位。
步骤S4:将自动报靶结果实时显示到界面上,同时进行语音报靶。
并提供成绩打印功能。
2,根据权利要求1所述的轻武器射击自动报靶装置,其特征在于包括长焦镜头(P1),CCD摄像机(P2),图像处理工控机(P3),用于显示和控制的触摸屏(P4),摄像机支架(P5),靶道(P6),靶车(P7),靶纸(P8)。
3,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于使用多个长焦镜头和CCD摄像机采集不同距离的靶面图像,通过CCD面积,靶车距离,靶面面积计算出所需要的镜头的焦距,保证靶面采集到的图像具有很好的清晰度,又保证靶面在视野中有足够的面积。
自动射击报靶装置
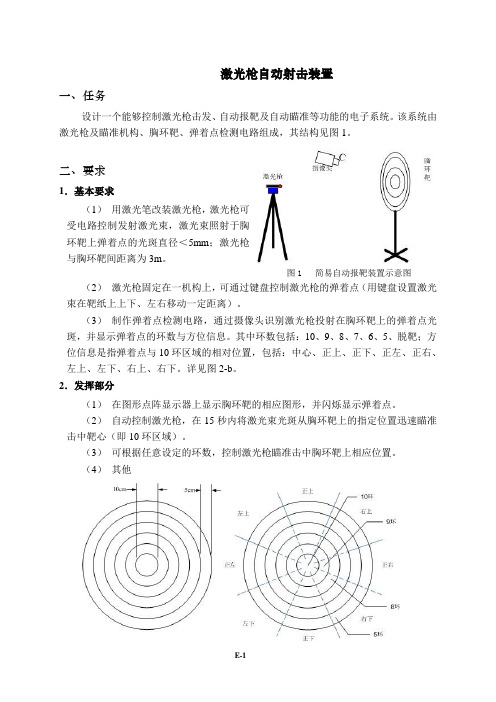
激光枪自动射击装置一、任务设计一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
该系统由激光枪及瞄准机构、胸环靶、弹着点检测电路组成,其结构见图1。
二、要求1.基本要求(1)用激光笔改装激光枪,激光枪可受电路控制发射激光束,激光束照射于胸环靶上弹着点的光斑直径<5mm;激光枪与胸环靶间距离为3m。
图1 简易自动报靶装置示意图(2)激光枪固定在一机构上,可通过键盘控制激光枪的弹着点(用键盘设置激光束在靶纸上上下、左右移动一定距离)。
(3)制作弹着点检测电路,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。
其中环数包括:10、9、8、7、6、5、脱靶;方位信息是指弹着点与10环区域的相对位置,包括:中心、正上、正下、正左、正右、左上、左下、右上、右下。
详见图2-b。
2.发挥部分(1)在图形点阵显示器上显示胸环靶的相应图形,并闪烁显示弹着点。
(2)自动控制激光枪,在15秒内将激光束光斑从胸环靶上的指定位置迅速瞄准击中靶心(即10环区域)。
(3)可根据任意设定的环数,控制激光枪瞄准击中胸环靶上相应位置。
(4)其他2-a 胸环靶尺寸2-b胸环靶环数及方位信息示意图2 胸环靶示意图三、说明1.激光枪可以由市场上的激光笔改造,由电路控制击发;每次击发使光斑维持3~5s时间,但此期间不得移动光斑。
2.可采用步进电机、舵机或直流电机等机构对激光枪进行两维控制,以实现瞄准。
激光枪及相关机构可由支架支撑。
3.胸环靶是在不反光的白纸画有一组相距5cm的同心圆(线宽不超过1mm),最内圆环直径10cm,圆环内为10环区域,从最内环至最外环间分别为9、8、7、6、5环区域,最外环外为脱靶。
胸环靶上不允许设置摄像头以外的传感器。
4.当激光枪的弹着点落在胸环靶的环线上时,报靶时采取就高不就低的原则。
例如,弹着点在8环与9环之间的环线上时,则认为是9环。
5.在不影响靶纸上圆环线的前提下,允许在靶纸上做标记。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种远距离自动报靶方法和装置公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]说明书摘要一种轻武器射击自动报靶的方法和装置,所述的方法包括:图像采集,弹孔识别,成绩判别,结果输出。
在弹孔识别步骤,本发明设计了快速的局部图像曲面特性分析方法,能够有效的去除复杂环境下图像变化检测结果中的大量噪声,并通过进一步时域分析的方法确认最终弹孔;在结果输出步骤,提供真实靶显示和模拟靶显示两种途径,通过模拟靶技术,可以在提高用户体验的同时,有效的节省成本。
所述的装置包括:多个长焦镜头和CCD摄像机,图像处理工控机,用于控制和显示的触摸屏。
本发明对于环境具有良好的适应性,即使在比较恶劣的天气,比如大风,有雾,低照度等情况下,仍具有良好的性能。
权利要求书1,一种轻武器射击自动报靶的方法和装置,其特征在于包括如下步骤:步骤S1:用户通过触摸屏选择靶车位置,装置控制靶车到达指定距离,同时选择对应距离的长焦镜头和CCD摄像机将采集到的靶面图像通过采集卡传输的图像处理工控机。
步骤S2:融合图像变化检测,图像局部曲面特征分析以及时域分析三种方法进行弹孔检测。
步骤S21:首先通过一个三点算法对靶面倾斜以及抖动情况进行计算,将输入图像进行校正和对准。
通过将当前输入图像与在线更新的靶面历史图像进行比较,获取发生变化的部分。
步骤S22:通过对图像的局部曲面特征进行分析,将图像分割为弹孔区域和非弹孔区域。
步骤S23:利用时域信息对初步检测到的弹孔进行验证,增加弹孔检测的准确性。
步骤S3:通过提取的环线信息,弹孔位置和尺寸计算射击成绩,成绩包括环数和方位。
步骤S4:将自动报靶结果实时显示到界面上,同时进行语音报靶。
并提供成绩打印功能。
2,根据权利要求1所述的轻武器射击自动报靶装置,其特征在于包括长焦镜头(P1),CCD摄像机(P2),图像处理工控机(P3),用于显示和控制的触摸屏(P4),摄像机支架(P5),靶道(P6),靶车(P7),靶纸(P8)。
3,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于使用多个长焦镜头和CCD摄像机采集不同距离的靶面图像,通过CCD面积,靶车距离,靶面面积计算出所需要的镜头的焦距,保证靶面采集到的图像具有很好的清晰度,又保证靶面在视野中有足够的面积。
4,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于图像采集设备,图像处理设备,以及用于显示和控制的触摸屏均安放在射击位,便于安装和管理。
5,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于使用了图像变化检测、图像局部特性分析以及时域分析三种方法进行弹孔检测,保证了弹孔检测方法的环境适应性和准确性。
6,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于使用一个三点算法对靶面倾斜以及抖动情况进行计算,将输入图像进行校正和对准。
7,根据权利要求5所述的弹孔检测方法,其特征在于基于图像局部曲面特征分析的弹孔分割方法,通过一种快速的曲面特征分析计算方法,将图像分割成为弹孔区域和非弹孔区域。
消除了图像变化检测中由于环境影响而引起的大量噪声。
8,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于结果输出中提供真实靶与模拟靶两种方式。
9,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于,同一张靶纸可以多次利用,通过模拟靶技术,每个人只看到自己的射击成绩,而不会受到前面的人射击成绩的干扰。
10,根据权利要求1所述的轻武器射击自动报靶的方法和装置,其特征在于,在射击成绩打印模块,可以手动的添加漏检的弹孔以及删除多检的弹孔。
从而保证了系统的完善性。
说明书一种远距离自动报靶方法和装置技术领域本发明机器视觉与自动化领域,具体涉及一种用于轻武器射击的远距离智能自动报靶的方法和装置。
背景技术在轻武器射击训练和比赛中,由于人工报靶效率和准确度较低,并且存在一定的危险性,自动报靶正在起着越来越重要的作用。
传统的基于声纳原理和电子靶等方式自动报靶技术普遍存在着成本高的问题,不利于在部队,射击场等场合的广泛应用。
随着图像处理技术的发展和计算机处理速度的提高,基于图像的方式逐渐受到人们的重视。
目前存在的基于图像的自动报靶系统中,存在着一些显着的问题。
首先,弹孔识别算法的环境适应性较差,主要是针对室内以及比较好的室外环境。
算法主要是通过简单的阈值分割,将弹孔区域从靶面图像中分割出来,用于后面的分析。
在比较复杂的室外环境中,靶面的不同区域由于受到光照,风吹等影响,仅仅依靠阈值分割很难准确的分割出弹孔。
另一个显着的缺点是,为了保证图像质量,图像采集设备通常安装在靶位附近,因为存在由于跳弹等现象造成设备损坏的问题,在户外靶场中还会涉及到设备安全的问题。
另外,设备安装的时候需要进行布线施工,成本较高。
发明内容现有技术存在着对环境适应性较差和设备安装管理不便的问题。
本发明的目的是提供一种环境适应能力强的自动报靶方法以及便于安装和管理的自动报靶装置为了实现上述目的,本发明提供了远距离的自动报靶装置,通过多个长焦镜头和CCD相机采集多个距离的靶面图像。
解决了系统安装与安全防护的问题。
通过融合图像变化检测,局部曲面形状分析以及时域分析的方法,提供了一种具有良好环境适应性的自动报靶方法。
本发明的轻武器射击远距离自动报靶方法和装置包括:步骤S1:用户通过触摸屏选择靶车位置,装置控制靶车到达指定距离,同时选择对应距离的长焦镜头和CCD摄像机将采集到的靶面图像通过采集卡传输的图像处理工控机。
步骤S2:融合图像变化检测,图像局部曲面特征分析以及时域分析三种方法进行弹孔检测。
步骤S21:首先通过一个三点算法对靶面倾斜以及抖动情况进行计算,将输入图像进行校正和对准。
通过将当前输入图像与在线更新的靶面历史图像进行比较,获取发生变化的部分。
步骤S22:通过对图像的局部曲面特征进行分析,将图像分割为弹孔区域和非弹孔区域。
步骤S23:利用时域信息对初步检测到的弹孔进行验证,增加弹孔检测的准确性。
步骤S3:通过提取的环线信息,弹孔位置和尺寸计算射击成绩,成绩包括环数和方位。
步骤S4:将自动报靶结果实时显示到界面上,同时进行语音报靶。
并提供成绩打印功能。
附图说明以下结合附图对以上自动报靶方法和装置的具体实施过程进行详细说明,以更清楚的描述本发明的上述特征和优点。
在以下的附图中:图1示出本发明方法流程图图2示出本发明装置结构示意图图3 示出本发明图像局部分析的八邻域示意图图4 示出本发明图像局部分析的灰度曲线图5 示出本发明基于面积分析局部曲面形状的示意图图6 示出本发明图像局部分析涉及的曲面形状图7 示出本发明的显示界面图8 示出模拟靶显示方式具体实施方式下面将结合附图,对本发明加以详细说明,应当指出的是,所描述的实施例仅旨在对本发明进行理解,而对其不起任何限定作用。
基于三点的靶面偏移和倾斜计算方法本实施例使用了三点算法对对靶面倾斜以及抖动情况进行计算,以解决在户外大风情况下的靶面剧烈抖动问题。
首先,通过图像分割获取靶纸中间十环内的白色白色区域,然后,通过轮廓拟合计算出十环的圆,所得到的圆心即靶的中心,这是第一个点A 。
以这个点为圆心,倍的十环所对应的圆的半径为半径画圆,与靶子的头部交与左右两点B 、C ,通过这三个点。
设基准图像中三个点的位置为A1、B1、C1,通过点A 与A1的差可以计算出靶面的偏移量,通过直线BC 与直线B1C1的夹角可以计算出靶面的倾斜角度。
设B 、C 、B1、C1的坐标分别为(x 1,y 1)、(x 2,y 2)、(x 3,y 3)、(x 4,y 4),直线BC 和B1C1的倾角分别为2121tan y y x x α-=-(1)4343tan y y x x β-=-(2)从而,靶面的倾斜角度θ为:|tan tan |= arctan 1tan *tan αβθαβ-+(3)接下来通过偏移量与倾斜角度可以将靶面图像与之前的图像进行对齐,从而有助于后面的处理。
这个基于三点的靶面偏移和倾斜计算方法,计算量小,不易受噪声影响。
基于图像局部曲面特征分析的弹孔分割方法在图像处理中,x ,y 是图像宽度和高度方向的离散坐标值,z 是(x,y )点的灰度值,(x,y,z )就构成了三维空间曲面上的点的笛卡尔坐标,因此,二维的图像可以看作是一个三维空间的曲面来分析。
曲面形状有9种情况,如图6所示,对于弹孔检测的应用来说,我们需要检测图中的第9种情况,也就是凹椭球曲面点。
在图像中,每一个点有8个领域点,也就是有四个方向,如图3所示。
我们只要保证每个方向的曲率L k 均满足0L k >,便可以认为,这是一个凹椭球面上的点。
以当前点为中心,我们在每个方向上取五个点,它们的灰度值便构成了一条曲线,如图4所示。
设四条曲线分别为i c ,1,2,3,4i =,每个方向定义一个标志i ,1,2,3,4f i =,用来标记在这个方向上是否为一个下凹曲线。
设曲线上五个点的灰度值分别为,1,2,3,4,5i p i =,我们定义判断当前点四个方向上的是否为下凹的标志位。
1335242341,2,3,4222i p p p p p p true p p p ConcaveFlag i false +++⎧<≤≤⎪==⎨⎪⎩且且其他 (4) 计算出四个标志位后,我们定义只有当四个标志位,1,2,3,4i ConcaveFlag i =均为true 的时候,才认为当前点是一个凹椭球曲面点。
我们已经得到了曲面的凹凸性判别结果,但这只是定性的判断,由于误差的影响,图像中非弹孔区域也可能出现一些凹椭球曲面点,因此,我们要利用另外一个信息,那就是曲面的弯曲程度,也就是曲率,弹孔区域的椭球面的曲率较大。
传统的计算曲率的方法速度很慢,我们通过一个近似的方法来对弯曲程度进行判断,从而达到快速判别弹孔的目的。
我们使用曲线所围成的面积来计算曲率,如图5所示, A1,A2,A3,A4为四个小梯形的面积,A5是大梯形的面积,A 是曲线所围成的面积。
我们定义曲面弯曲程度的判决准则为式(5),其中T 是A 区域的面积的一个阈值。
最终的椭球曲面检测算法的判别准则为式(6)。
51234true A A A A A T ConcaveArea false ---->⎧=⎨⎩其他(5)1335242341,2,3,4222i p p p p p p true p p p ConcaveArea true ConcaveFlag i false+++⎧<≤≤=⎪==⎨⎪⎩且且且其他(6) 当,1,2,3,4i ConcaveFlag i =均为true 时,这是一个凹椭球曲面点,即一个弹孔点。
在计算时,并不需要对每一个点都进行四个方向的检测才最终确定这是不是一个椭球曲面点,当任何一个方向上的标志为不为真时,我们就可以认为这个点不是椭球曲面点,从而节省了很大的计算量。