洗衣机模糊控制matlab仿真
洗衣机模糊控制仿真实验报告
洗衣机模糊控制仿真实验报告一、实验目的本实验旨在通过对洗衣机运行过程的模糊控制仿真实验,帮助学生更好地了解模糊控制的基本原理和实现方法。
二、实验原理洗衣机模糊控制系统主要包括模糊控制器、模糊推理机和输出规则等三个部分。
模糊控制器是模糊系统的核心部分,其主要作用是将输入信号转化为模糊集,并将控制输出信号转化为真实输出信号。
模糊控制器的输入为洗衣机工作状态的一些参数,例如水位、温度等,输出为洗衣机运行状态的一些控制命令,例如加热、搅拌等。
模糊推理机是由一系列规则组成的系统,它负责根据输入的模糊集和一组先验规则,进行模糊推理,得到控制输出信号的模糊集,即模糊控制器的中间变量。
输出规则主要为控制输出信号的模糊集赋值,即将模糊集中各个元素映射到真实输出信号的取值范围内。
三、实验步骤1、建立洗衣机的模糊控制系统模型,包括模糊控制器、模糊推理机和输出规则等。
2、设置洗衣机的运行参数,例如水位、温度等,作为模糊控制器的输入。
3、根据洗衣机的运行状态,制定一组先验规则,作为模糊推理机的输入,并进行模糊推理。
4、根据模糊推理得到的控制输出信号的模糊集,进行输出规则的映射,得到洗衣机的真实控制命令。
5、根据洗衣机的控制命令,模拟洗衣机的工作流程。
6、对洗衣机的工作流程进行仿真实验,并记录实验结果。
四、实验结果分析经过多次实验,得到了洗衣机的模糊控制系统的优化参数,能够实现洗衣机的良好控制。
通过对实验结果的分析,可以发现,模糊控制系统可以有效地调节洗衣机的运行状态,使其在不同的工作状态下保持稳定且高效的运行。
同时,模糊控制系统也具有很强的适应性和鲁棒性,可以自适应地调节参数,应对各种不同的运行环境。
五、实验总结本实验通过模拟洗衣机的工作流程,对模糊控制系统的基本原理和实现方法进行了深入探究,能够有效地帮助学生掌握模糊控制系统的设计和应用方法。
同时,在实验过程中,也需要注意对实验数据和结论的分析和总结,以便更好地优化模糊控制系统的参数和性能,实现最佳控制效果。
模糊控制系统课件4.4(FIS的设计与仿真)

坐标区
网格,可 填入3-100 之间的数 字
主菜单Options之下有两个子菜单:Plot(画图) 和Color Map(填色),都是关于绘图的。
实验一:用GUI设计Mamdani型FIS
洗衣机利用分光光度计传感器,通过检测洗涤液的
透明程度等方法,测出洗涤液中的污泥含量x∈[0,100]% 和油脂含量y∈[0,100]%。模糊控制规则根据x和y的数 据,选定洗涤时间t∈[0,60](分钟)。因为只考虑洗涤时 间,可以用双输入-单输出模糊控制器完成任务。
4.4 FIS的设计与仿真
启动MATLAB后,在主窗口键入fuzzy,回车。
模糊子集
把模糊推理系统改成T-S(Sugeno)型: File→New FIS…→Sugeno
线性函数
这两个编辑 框不允许填 入内容
相当于Mamdani推理中的蕴涵、综合、清晰化 三者的综合结果
模糊规则编辑器
以液位控制系统为例。
④if level is okay and rate is positive then valve is close slow
⑤if level is okay and rate is negative then valve is open slow 根据上述模糊规则,编辑这个“液位模糊控制器” 的仿真模型。
实验二:用GUI设计Sugeno型FIS
例:双输入(x和y)、单输出(u)系统,四条 模糊规则。
R1 : if R2 : if R3 : if R4 : if
x is x1 then u1 x 1; x is x2 and y is y1 then u 2 0.1x 4 y 1.2; x is x2 and y is y2 then u3 0.9 x 0.7 y 9; x is x3 and y is y2 then u4 0.2 x 0.1 y 0.2
智能控制实验-模糊控制
实验一 洗衣机的模糊控制仿真一、实验目的本实验要求在学生掌握模糊控制器基本工作原理和设计方法基础上,熟悉MALAB 中的模糊控制工具箱,能针对实际问题设计模糊控制器,建立模糊控制系统,训练学生综合运用计算机来解决一些实际问题的能力。
二、实验设备计算机一台、MATLAB 软件三、实验要求设计一个模糊控制器,根据衣物的泥污和油污程度,输出衣物的洗涤时间,通过改变控制参数的大小,观察模糊控制的性能。
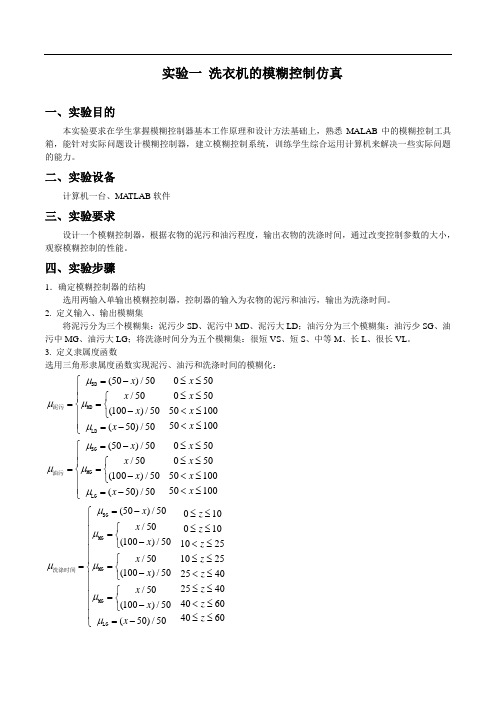
四、实验步骤1.确定模糊控制器的结构选用两输入单输出模糊控制器,控制器的输入为衣物的泥污和油污,输出为洗涤时间。
2. 定义输入、输出模糊集 将泥污分为三个模糊集:泥污少SD 、泥污中MD 、泥污大LD ;油污分为三个模糊集:油污少SG 、油污中MG 、油污大LG ;将洗涤时间分为五个模糊集:很短VS 、短S 、中等M 、长L 、很长VL 。
3. 定义隶属度函数选用三角形隶属度函数实现泥污、油污和洗涤时间的模糊化:(50)/50050/50050(100)/505010050100(50)/50x x x x x x x x μμμμ=-⎧≤≤⎪≤≤⎧⎪==⎨⎨-<≤⎩⎪⎪<≤=-⎩SD MD 泥污LD (50)/50050/50050(100)/505010050100(50)/50x x x x x x x x μμμμ=-⎧≤≤⎪≤≤⎧⎪==⎨⎨-<≤⎩⎪⎪<≤=-⎩SG MG 油污LG(50)/50010/50010(100)/501025/501025(100)/5025402540/504060(100)/504060(50)/50x z x z x z x z x z z x z x z x μμμμμμ=-⎧≤≤⎪⎧≤≤⎪=⎨⎪-<≤⎩⎪≤≤⎧⎪==⎨⎨-<≤⎩⎪⎪≤≤⎧⎪=⎨<≤-⎪⎩⎪≤≤=-⎩SG MG MG 洗涤时间MG LG实验结果:实验分析:6.模糊推理因模糊控制规则表对称,所以上图为input1 和input2分别为50时input2和input1与洗涤时间的关系。
唐浦华智能控制实验报告
实验报告(计算机类)课程名称: 智能控制课程代码: 106003599学生所在学院: 机械工程学院年级/专业/班:机电12(3)-2 学生姓名:吴丽学号: 3320120193208实验总成绩:任课教师:唐浦华开课学院: 机械工程学院实验中心名称:5A-107.西华大学实验报告(计算机类)开课学院及实验室: 机械工程学院 实验时间 : 年 月 日一、实验目的和任务采用matlab 仿真,进行验证性实验并分析。
二、验仪器、设备及材料Pc 机,matlab 软件,洗衣机模糊控制系统仿真程序三、实验原理及步骤以洗衣机洗涤时间的模糊控制系统设计为例,其控制是一个开环的模糊决策过程,模糊控制按以下步骤进行:① 确定模糊控制器的结构; ② 定义输入、输出模糊集; ③ 定义隶属度函数; ④ 建立模糊控制规则; ⑤ 建立模糊控制表; ⑥ 模糊推理; ⑦仿真实例。
四、实验结果① 污泥和油脂隶属度函数设计仿真结果,如图一; ② 洗涤时间隶属度函数设计仿真结果,如图二;图一图二③洗衣机模糊控制系统仿真结果:五、实验结果分析西华大学实验报告(计算机类)开课学院及实验室:机械工程学院实验时间:年月日采用matlab仿真,进行验证性实验并分析。
二、验仪器、设备及材料Pc机,matlab软件,模糊PID仿真程序三、实验原理及步骤被控对象为G(s)=133/(s2+25s)采样时间为1ms,采用z变换进行离散化,离散化后的被控对象为Y(k)=-den(2)y(k-1)-den(3)y(k-2)+num(2)u(k-1)+num(3)u(k-2)位置指令为幅值为1.0的阶跃信号,r(k)=1.0。
仿真时,先运行模糊推理系统设计程序chap4_7a.m,实现模糊推理系统fuzzpid.fis,并将此模糊推理系统调入内存中,然后运行模糊控制程序chap4_7b.m。
四、实验结果①模糊控制程序chap4_7a.m仿真结果:②模糊控制程序chap4_7b.m仿真结果:五、实验结果分析西华大学实验报告(计算机类)开课学院及实验室:机械工程学院实验时间:年月日并采用matlab仿真,进行验证性实验并分析。
基于MATLAB的洗衣机模糊控制设计
基于MATLAB的洗衣机模糊控制设计MATLAB是一种功能强大的数学软件,可以用于模糊控制设计。
在本文中,我们将介绍如何使用MATLAB来设计一个基于模糊控制的洗衣机控制系统。
首先,我们需要定义洗衣机模糊控制系统的输入和输出变量。
在一个简单的洗衣机系统中,输入变量可以是衣物的脏度和水位,而输出变量可以是洗衣机的清洗时间和水温。
接下来,我们需要建立一个模糊控制器模型。
模糊控制器是一个基于模糊逻辑的控制器,能够处理模糊输入和输出变量。
在MATLAB中,我们可以使用Fuzzy Logic Toolbox来建立一个模糊控制器模型。
我们首先需要定义模糊输入变量的隶属函数。
在这个例子中,我们可以定义脏度变量的隶属函数为"低","中"和"高",水位变量的隶属函数为"低","中"和"高"。
然后,我们需要定义模糊输出变量的隶属函数。
在这个例子中,我们可以定义清洗时间变量的隶属函数为"短","适中"和"长",水温变量的隶属函数为"低","中"和"高"。
接下来,我们需要定义输入和输出变量之间的模糊规则。
在这个例子中,我们可以定义以下规则:规则1:如果脏度是低和水位是低,那么清洗时间是短和水温是低。
规则2:如果脏度是低和水位是中,那么清洗时间是适中和水温是中。
规则3:如果脏度是低和水位是高,那么清洗时间是长和水温是中。
规则4:如果脏度是中和水位是低,那么清洗时间是适中和水温是中。
规则5:如果脏度是中和水位是中,那么清洗时间是适中和水温是中。
规则6:如果脏度是中和水位是高,那么清洗时间是长和水温是高。
规则7:如果脏度是高和水位是低,那么清洗时间是长和水温是中。
规则8:如果脏度是高和水位是中,那么清洗时间是长和水温是高。
模糊控制的Matlab仿真实例
其他例子
模型Shower.mdl―淋浴温度调节模糊控制系统仿真; 模型slcp.mdl―单级小车倒摆模糊控制系统仿真; 模型 slcp1.mdl―变长度倒摆小车模糊控制系统仿
真; 模型 slcpp1.mdl—定长、变长二倒摆模糊控制系
统仿真; 模型slbb.mdl―球棒模糊控制系统仿真; 模型sltbu.mdl―卡车智能模糊控制倒车系统仿真; 模型sltank2.mdl ― 用子系统封装的水箱控制仿
为简单起见,我们直接利用系统里已经编辑好的 模糊推理系统,在它的基础上进行修改。这里我 们采用与tank . fis中输入输出变量模糊集合完 全相同的集合隶属度函数定义,只是对模糊规则 进行一些改动,来学习模糊工具箱与仿真工具的 结合运用。对于这个问题,根据经验和直觉很显 然可以得到如下的模糊度示 波器
冷水阀子系统
这个仿真模型的输出是用示波器来表示的,如 图所示。通过示波器上的图形我们可以清楚地 看到温度和水流量跟踪目标要求的性能。
水温示波器
水流示波器
水温偏差区间模糊划分及隶属度函数
水流量偏差区间模糊划分及隶属度函数
输出对冷水阀控制策略的模糊化分及隶属度函数
选Edit菜单,选择Rules, 弹出一新界面Rule Editor. 在底部的选择框内,选择相应的 IF…AND…THEN 规则,点击Add rule 键,上部 框内将显示相应的规则。本例中用9条左右的规 则,依次加入。如下图所示:
模糊逻辑工具箱仿真结果
模糊规则浏览器用于显示各条模糊控制规则对 应的输入量和输出量的隶属度函数。通过指定 输入量,可以直接的显示所采用的控制规则, 以及通过模糊推理得到相应输出量的全过程, 以便对模糊规则进行修改和优化。
这样的结果与实际情况还是有些不符。通常顾客都是给15%的 小费,只有服务特别好或特别不好的时候才有改变,也就是说, 希望在图形中间部分的响应平坦些,而在两端(服务好或坏) 有凸起或凹陷。这时服务与小费是分段线性的关系。例如,用 下面 MATLAB 语句绘出的下图的情况。
基于Matlab的洗衣机模糊控制 - 副本

基于MATLAB的洗衣机模型模糊设计控制一、问题描述随着现代社会生活节奏的不断加快和人们生活水平的不断提高,人们对各种方便、快捷的家用电器需求量越来越大,为了提高人们的生活效率,全自动洗衣机应运而生。
洗衣机的技术发展日新月异,产品类型众多,但是从总体来看,人们对洗衣机的基本要求应该是:省时、省电、省水、磨损率小、操作方便、功能完善等。
模糊控制洗衣机不仅实现了洗衣机的全面自动化,也提高了洗衣的质量,具有很强的实用性和较好的发展前景。
本设计就是围绕着智能洗衣机进行研究。
本课题的主要目的就是设计一个比较合理的洗衣机模糊控制器,这种采用模糊控制的洗衣机能够自动检测洗衣桶内水的脏污程度和污渍性质(油污或者泥污);能自动预选洗涤时间,并适时调整这些运行参数,以达到最佳的洗涤效果。
二、解决方案本课题的主要是通过模糊控制来对洗衣机进行控制,通过MATLAB对其仿真。
课题的主要目的是设计一个比较合理的洗衣机模糊控制器,这种采用模糊控制的洗衣机能够自动检测洗衣桶内水的脏污程度和污渍性质(油污或者泥污);能自动预选水位和洗涤时间,并能够进行整个洗涤过程中实施监控,并适时调整这些运行参数,以达到最佳的洗涤效果。
模糊控制器的组成框图如图1所示图1三、实现步骤本设计选用两输入单输出模糊控制器。
控制器的输入为衣物的污泥和油脂,输出为洗涤时间。
将污泥分为3个模糊集:SD(污泥少),MD (污泥中),LD (污泥多);将油脂分为3个模糊集:NG (油脂少),MG (油脂中),LG (油脂多);将输出的洗涤时间分为5个模糊集:VS (很短),S (短),M (中等),L (长),VL (很长)。
1、定义隶属函数污泥含量选用如下隶属函数:()()()()()()⎪⎪⎩⎪⎪⎨⎧-=⎩⎨⎧-=-==50/5050/10050/50/50x x x x x x x μLDMD SD μμμ污泥1005010050500500≤<≤<≤≤≤≤x x x x采用三角隶属函数可实现污泥的模糊化采用Matlab 仿真,如图2所示。
洗衣机的神经网络模糊控制器的设计研究实验使用说明

mbhsyc.m 目标样本和样本的差值比较仿真
实验使用说明
实验——洗衣机的神经网络模糊控制器的设计研究,具体实验环境描技术Ghost XP
版本 SP3简体中文版
软件环境
实验所应用的软件是MATLAB R2007a。MATLAB是美国Mathworks公司1982年推出的数学软件,它具有强大的数值计算能力和优秀的数据可视化能力。MATLAB软件针对各种学科相继推出了功能各异的工具箱,本实验主要应用它开发的神经网络工具箱。MATLAB中的神经网络工具箱编写完备、简单易用,因此是神经网络领域内人员的重要工具。实验中的软件版本号为MATLAB R2007a。
程序编写及运行
编写:
实验中的程序都在M文件中编写。单击MATLAB R2007a 中的File―New―M-File 即可进入文本编辑窗口,输入实验中的程序。输完程序后,单击保存按钮,在对话框中输入文件名,文件名开头必须是字母。把编写好的M文件放入到MATLAB安装文件夹下的work文档中。
运行:
打开MATLAB软件,单击File—Open—文件名。打开该文件编辑窗口,再单击Debug—Run即可运行该文件。即可清晰地看到对应网络训练的过程以及函数逼近曲线和误差曲线图。
文件功能说明:
syyb.m 实验样本的仿真
mbyb.m 目标样本的仿真
洗衣机模糊控制建模

智能控制课程作业模糊控制理论实验报告题目洗衣机系统模糊控制建模与仿真班级姓名学号2014年3月13日一.实验目的通过设计洗衣机洗涤时间的模糊控制系统,理解模糊控制的基本原理。
掌握模糊控制系统MATLAB建模与仿真的方法。
二.实验原理洗衣机洗涤时间的模糊控制是一个开环模糊决策过程,其基本原理框图如图1-1所示。
它的核心部分是模糊控制器,模糊控制器的控制律由计算机程序来实现。
图1-1 系统原理框图系统选用两输入单输出的模糊控制器。
控制器的输入为衣物的污泥量x和油脂量y,输出为洗涤时间z。
将污泥分为3个模糊集:SD(污泥少),MD(污泥中),LD(污泥多);将油脂分为3个模糊集:NG(油脂少),MG(油脂中),LG(油脂多);将洗涤时间分为5个模糊集:VS(很短),S(短),M(中等),L(长),VL很长。
首先,定义输入x,y变量,输出z变量的隶属函数。
根据“污泥越多,油脂越多,洗涤时间越长”;“污泥适中,油脂适中,洗涤时间适中”;“污泥越少,油脂越少,洗涤时间越短”的规律建立洗衣机模糊规则表。
然后,根据模糊规则进行模糊推理并得到洗涤时间的模糊集合。
最终,利用重心法对模糊系统反模糊化,将洗涤时间的推理结果转化成精确值z输出。
三.实验内容利用MATLAB软件实现上述洗衣机系统模糊控制的建模与仿真。
1.建立x,y,z的隶属函数洗衣机系统变量x,y,z的隶属函数分段表达式,如式1-1所示。
()()()()()()()()()()()()()()()()SD MD LD NG MG LGVS 50/50050/50050100/505010050/505010050/50050/5005011100/505010050/505010010/10010Sx x x x x x x x x x x y y y y y y y y y y y z z z z μμμμμμμμμμμ=-≤≤⎧⎪≤≤⎧⎪⎪==⎨⎨-<≤⎪⎩⎪⎪=-<≤⎩=-≤≤⎧⎪≤≤⎧⎪⎪==-⎨⎨-<≤⎪⎩⎪⎪=-<≤⎩=-≤≤=污泥油脂洗涤时间()()()()()()()()()VL /1001025/15102510/15102540/15254025/15254060/20406040/204060M L z z z z z z z z z z z z z z z z z μμμ⎧⎪≤≤⎪⎧⎪=⎨⎪-<≤⎪⎩⎪⎪-≤≤⎧⎪⎪=⎨⎨-<≤⎪⎪⎩⎪-≤≤⎧⎪⎪=⎨⎪-<≤⎪⎩⎪⎪=-≤≤⎩在MATLAB 中,定义本系统为一个Mamdani (普通)型模糊控制系统,命名为a 。
基于matlab的洗衣机模糊控制器的设计及仿真

基于matlab 旳洗衣机模糊控制器旳设计及仿真 以洗衣机洗涤时间旳模糊控制系统设计为例,其控制原理是根据衣物上污泥和油脂旳限度,调节洗涤时间,该控制是一种开环旳模糊决策过程,模糊控制按如下环节进行:
1. 拟定模糊控制器旳构造
选用两输入单输出旳模糊控制器。
控制器旳输入为衣物旳污泥和油脂,输出 为洗涤时间。
2. 定义输入、输出旳模糊集
将污泥分为3个模糊集:SD (污泥少),MD (污泥中),LD (污泥多),取 值为[0,100];将油脂分为3个模糊集:NG (油脂少),MG (油脂中),LG (油脂多),取值为[0,100];将洗涤时间分为5个模糊集:VS (很短),S (短),M (中档),L (长),VL (很长),取值为[0,60]。
3. 定义输入、输出从属函数
选用如下三角形从属函数可实现污泥旳模糊化。
采用Matlab 进行仿真,污泥从属函数仿真成果如图1所示。
选用如下三角形从属函数实现油脂旳模糊化,如图2所示。
⎪⎪⎩⎪⎪⎨⎧≤<-=⎩⎨⎧≤<-≤≤=≤≤-==1005050/)50()(1005050/)100(50050/)(50050/)50()(x x x x x x x x x x x LD MD SD μμμμ污泥⎪⎪⎩⎪⎪⎨⎧≤≤-=⎩⎨⎧≤<-≤≤=≤≤-==100
5050/)50()(1005050/)100(50050/)(50050/)50()(y y y y y y y y y y y LG MG NG μμμμ油脂
图1污泥从属函数图2油脂从属函数。
基于MATLAB模糊洗衣机设计
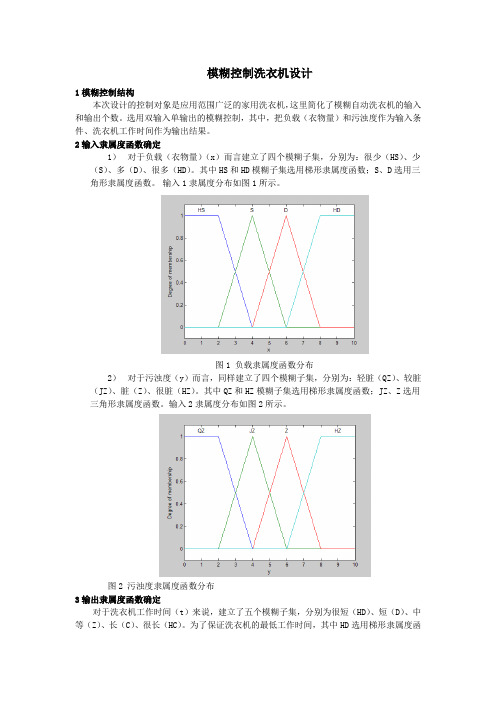
模糊控制洗衣机设计1模糊控制结构本次设计的控制对象是应用范围广泛的家用洗衣机,这里简化了模糊自动洗衣机的输入和输出个数。
选用双输入单输出的模糊控制,其中,把负载(衣物量)和污浊度作为输入条件、洗衣机工作时间作为输出结果。
2输入隶属度函数确定1)对于负载(衣物量)(x)而言建立了四个模糊子集,分别为:很少(HS)、少(S)、多(D)、很多(HD)。
其中HS和HD模糊子集选用梯形隶属度函数;S、D选用三角形隶属度函数。
输入1隶属度分布如图1所示。
图1 负载隶属度函数分布2)对于污浊度(y)而言,同样建立了四个模糊子集,分别为:轻脏(QZ)、较脏(JZ)、脏(Z)、很脏(HZ)。
其中QZ和HZ模糊子集选用梯形隶属度函数;JZ、Z选用三角形隶属度函数。
输入2隶属度分布如图2所示。
图2 污浊度隶属度函数分布3输出隶属度函数确定对于洗衣机工作时间(t)来说,建立了五个模糊子集,分别为很短(HD)、短(D)、中等(Z)、长(C)、很长(HC)。
为了保证洗衣机的最低工作时间,其中HD选用梯形隶属度函数,其余则为三角形隶属度函数,输出1的隶属度分布如图3所示。
图3 工作时间的隶属度函数分布4模糊规则建立根据经验(衣服越多,越污浊,则洗涤时间越长。
反之则相反)可以归纳总结出如下16条规则,如表1所示。
表1 模糊控制规则表5输出模糊量清晰化本次选用的清晰化方法为最大隶属度平均值法(mom)6测试分别随机选取三组输入测试1)x=1、y=22)x=5、y=63)x=8、y=97模糊控制程序%模糊控制程序clcclear all;close all;a=newfis('xiyiji');%新建模糊控制f1=1;a=addvar(a,'input','x',[0,10*f1]); %建立模糊输入负载的隶属度函数a=addmf(a,'input',1,'HS','trapmf',[0,0,2*f1,4*f1]);a=addmf(a,'input',1,'S','trimf',[2*f1,4*f1,6*f1]);a=addmf(a,'input',1,'D','trimf',[4*f1,6*f1,8*f1]);a=addmf(a,'input',1,'HD','trapmf',[6*f1,8*f1,10*f1,10*f1]);f2=1;a=addvar(a,'input','y',[0,10*f2]); %建立模糊输入污浊度的隶属度函数a=addmf(a,'input',2,'QZ','trapmf',[0,0,2*f2,4*f2]);a=addmf(a,'input',2,'JZ','trimf',[2*f2,4*f2,6*f2]);a=addmf(a,'input',2,'Z','trimf',[4*f2,6*f2,8*f2]);a=addmf(a,'input',2,'HZ','trapmf',[6*f2,8*f2,10*f2,10*f2]);f3=1;a=addvar(a,'output','t',[0,60*f3]); %建立模糊输时间的隶属度函数a=addmf(a,'output',1,'HD','trapmf',[0,0,10*f3,20*f3]);a=addmf(a,'output',1,'D','trimf',[10*f3,20*f3,30*f3]);a=addmf(a,'output',1,'Z','trimf',[20*f3,30*f3,45*f3]);a=addmf(a,'output',1,'C','trimf',[30*f3,45*f3,60*f3]);a=addmf(a,'output',1,'HC','trimf',[45*f3,60*f3,60*f3]);%建立模糊规则库,共16条规则rulelist = [1 1 1 1 1;1 2 1 1 1;1 32 1 1;1 4 3 1 1;2 1 1 1 1;2 2 2 1 1;2 3 3 1 1;2 4 4 1 1;3 1 2 1 1;3 2 3 1 1;3 34 1 1;3 4 5 1 1;4 1 3 1 1;4 2 4 1 1;4 35 1 1;4 45 1 1];a=addrule(a,rulelist);%showrule(a) % 显示模糊规则a1=setfis(a,'DefuzzMethod','mom'); % 设置清晰化函数为mom writefis(a1,'xiyiji'); % 储存模糊文件a2=readfis('xiyiji'); % 读取模糊文件disp('负载x范围:[0,10],污浊度y范围:[0,10]');x=input('负载:'); %输入负载y=input('污浊度:'); %输入污浊度t=evalfis([x,y],a2); %调用模糊控制函数t=ceil(t); %取整fprintf('工作时间t为%d分钟\n',t); %输出工作时间figure(1); %显示模糊控制器plotfis(a2);figure(2); %显示输入1的隶属度plotmf(a,'input',1);figure(3); %显示输入2的隶属度plotmf(a,'input',2);figure(4); %显示输出1的隶属度plotmf(a,'output',1);。
智能控制实验

实验一 模糊控制器设计与实现实验名称:模糊控制器设计与实现实验教学的指导思想和教学目的:本实验是在学生掌握模糊控制器基本工作原理和设计方法基础上,阅读有关参考书利用MATLAB 中Fuzzy toolboxes 设计模糊控制器,并建立模糊控制系统。
实验教学的基本要求:要求学生通过上机实习,熟悉MATLAB 的基本操作命令、simulink 和模糊控制工具箱的使用,掌握利用MATLAB 设计模糊控制器的基本方法,为以后利用计算机进行模糊控制系统分析与设计打下良好的基础。
实验步骤:模糊控制位置跟踪被控对象为首先运行模糊控制器程序chap4_2.m ,并将模糊控制系统保存在a2之中。
然后运行模糊控制的Simulink 仿真程序,位置指令取正弦信号,仿真结果如图4-10所示。
模糊控制位置跟踪的Simulink 仿真程序见chap4_3.mdl 。
图4-10 正弦位置跟踪s 50s 400)(2+=s G实验二 洗衣机模糊控制器的设计与仿真实验名称:洗衣机模糊控制器的设计与仿真实验目的:掌握洗衣机模糊控制器的设计步骤以及MATLAB 仿真实现实验步骤:(1)模糊控制器的结构选用单变量二维模糊控制器。
控制器的输入为衣物的污泥和油脂,输出为洗涤时间。
(2)定义输入输出模糊集将污泥分为三个模糊集:SD (污泥少),MD (污泥中),LD (污泥多),取值范围为[0,100]。
(3)定义隶属函数选用如下隶属函数:采用三角形隶属函数实现污泥的模糊化,如图4-11所示。
采用Matlab 仿真,可实现污泥隶属函数的设计,仿真程序为chap4_4.m将油脂分为三个模糊集:NG (无油脂),MG (油脂中),LG (油脂多),取值范围为[0,100]。
选用如下隶属函数:采用三角形隶属函数实现污泥的模糊化,如下图4-12所示。
仿真程序同污泥隶属函数。
⎪⎪⎩⎪⎪⎨⎧≤<-=⎩⎨⎧≤<-≤≤=≤≤-==1005050/)50()(1005050/)100(50050/)(50050/)50()(x x x x x x x x x x x LD MD SD μμμμ污泥⎪⎪⎩⎪⎪⎨⎧≤≤-=⎩⎨⎧≤<-≤≤=≤≤-==1005050/)50()(1005050/)100(50050/)(50050/)50()(y y y y y y y y y y y LG MG NG μμμμ油脂图4-12 油脂隶属函数将洗涤时间分为三个模糊集:VS (很短),S (短),M (中等),L (长),VL (很长),取值范围为[0,60]。
模糊PID控制及其MATLAB仿真讲解
模糊PID控制及其MATLAB实现姓名:专业班级:学号:授课教师:摘要PID(比例积分微分)控制具有结构简单、稳定性能好、可靠性高等优点,尤其适用于可建立精确数学模型的控制系统。
而对于一些多变量、非线性、时滞的系统,传统的PID控制器并不能达到预期的效果。
随着模糊数学的发展,模糊控制的思想逐渐得到控制工程师们的重视,各种模糊控制器也应运而生。
而单纯的模糊控制器有其自身的缺陷—控制效果很粗糙、控制精度无法达到预期标准。
但利用传统的PID控制器和模糊控制器结合形成的模糊自适应的PID控制器可以弥补其缺陷;它将系统对应的误差和误差变化率反馈给模糊控制器进而确定相关参数,保证系统工作在最佳状态,实现优良的控制效果。
论文介绍了参数自适应模糊PID控制器的设计方法和步骤。
并利用MATLAB 中的SIMULINK 和模糊逻辑推理系统工具箱进行了控制系统的仿真研究,并简要地分析了对应的仿真数据。
关键词: 经典PID控制; 模糊控制; 自适应模糊PID控制器; 参数整定; MATLAB仿真ABSTRACTPID(Proportion Integration Differentiation) control, with lots of advantages including simple structure, good stability and high reliability, is quite suitable to establish especially the control system which accurate mathematical model is available and needed. However, taken multivariable, nonlinear and time-lag into consideration, traditional PID controller can not reach the expected effect.Along with the development of Fuzzy Mathematics, control engineers gradually pay much attention to the idea of Fuzzy Control, thus promoting the invention of fuzzy controllers. However, simple fuzzy controller has its own defect, where control effect is quite coarse and the control precision can not reach the expected level. Therefore, the Fuzzy Adaptive PID Controller is created by taking advantage of the superiority of PID Controller and Fuzzy Controller. Taken this controller in use, the corresponding error and its differential error of the control system can be feed backed to the Fuzzy Logic Controller. Moreover, the three parameters of PID Controller is determined online through fuzzification, fuzzy reasoning and defuzzification of the fuzzy system to maintain better working condition than the traditional PID controller.Meanwhile,the design method and general steps are introduced of the Parameter self-setting Fuzzy PID Controller. Eventually, the Fuzzy Inference Systems Toolbox and SIMULINK toolbox are used to simulate Control System. The results of the simulation show that Self-organizing Fuzzy Control System can get a better effect than the Classical PID controlled evidently.Keywords: Classic PID control; Fuzzy Control; Parameters tuning; the Fuzzy Adaptive PID Controller; MATLAB simulation目录第一章绪论 (1)1.1 研究的背景及意义 (1)1.2 经典PID控制系统的分类与简介 (2)1.2.1 P控制 (2)1.2.2 PI控制 (2)1.2.3 PD控制 (2)1.2.4 比例积分微分(PID)控制 (2)1.3 模糊逻辑与模糊控制的概念 (3)1.3.1 模糊控制相关概念 (3)1.3.2 模糊控制的优点 (4)1.4 模糊控制技术的应用概况 (4)1.5 本文的研究目的和内容 (5)第二章PID控制 (6)2.1 PID的算法和参数 (6)2.1.1 位移式PID算法 (6)2.1.2 增量式PID算法 (7)2.1.3 积分分离PID算法 (7)2.1.4 不完全微分PID算法 (8)2.2 PID参数对系统控制性能的影响 (9)2.2.1 比例系数K P对系统性能的影响 (9)2.2.2 积分时间常数T i对系统性能的影响 (9)2.2.3 微分时间常数T d对系统性能的影响 (9)2.3 PID控制器的选择与PID参数整定 (10)2.3.1 PID控制器的选择 (10)2.3.2 PID控制器的参数整定 (10)第三章模糊控制器及其设计 (11)3.1 模糊控制器的基本结构与工作原理 (11)3.2 模糊控制器各部分组成 (11)3.2.1 模糊化接口 (11)3.2.2 知识库 (12)3.2.3 模糊推理机 (12)3.2.4 解模糊接口 (13)3.3模糊推理方式 (13)3.3.1 Mamdani模糊模型(迈达尼型) (13)3.3.2 Takagi-Sugeno模糊模型(高木-关野) (13)3.4模糊控制器的维数确定 (14)3.5 模糊控制器的隶属函数 (15)3.6模糊控制器的解模糊过程 (17)3.7 模糊PID控制器的工作原理 (18)第四章模糊PID控制器的设计 (19)4.1 模糊PID控制器组织结构和算法的确定 (19)4.2 模糊PID控制器模糊部分设计 (19)4.2.1 定义输入、输出模糊集并确定个数类别 (19)4.2.2 确定输入输出变量的实际论域 (20)4.2.3 定义输入、输出的隶属函数 (20)4.2.4 确定相关模糊规则并建立模糊控制规则表 (20)第五章模糊PID控制器的MATLAB仿真 (24)5.1 模糊PID控制的仿真 (24)5.1.1 FIS编辑器 (24)5.1.2 隶属函数 (25)5.1.3 模糊规则库 (25)5.2 对模糊控制器编程仿真 (27)第六章结语 (31)参考文献 (32)第一章绪论1.1 研究的背景及意义随着越来越多的新型自动控制应用于实践,其控制理论的发展也经历了经典控制理论、现代控制理论和智能控制理论三个阶段。
模糊控制实验
实验一洗衣机模糊控制器设计实验二模糊PD控制器设计一、实验目的1.熟悉模糊控制的特征、结构以及学习算法2.掌握用MATLAB实现神经网络控制系统仿真的方法。
3.学习分析模糊控制器和常规PID的混合结构。
二、实验设备和条件计算机系统Matlab仿真软件三、实验原理和操作步骤众所周知,传统的PID控制器是过程控制中应用最广泛最基本的一种控制器,它具有简单、稳定性好、可靠性高等优点。
PID调节规律对相当多的工业控制对象,特别是对于线性定常系统控制是非常有效的。
其调节过程的品质取决于PID控制器各个参数的整定。
同时我们也注意到,考虑到模糊控制实现的简易性和快速性,通常以系统误差e和误差变化de为输入语句变量,因此它具有类似于常规的PD控制器特性。
经典的模糊PD控制器结构图如图所示,其中需要实现引入增益K和d K分别对误差信号及其变化率信号进行规范处理,使得其值域P范围与模糊变量的领域吻合,然后对这两个信号模糊化后的出的信号(d E E ,)进行模糊推理,并将得到的模糊化量解模糊化,得出变量U ,通过规范化增益u K 后就可以得出控制信号)(t u 。
四、实验内容假设受控对象模型为24.228()(0.5)( 1.648.456)G s s s s =+++设计一模糊控制器使其超调量不超过1%,输出的上升时间<0.3。
步骤1. 确定e ,de 和u 的论域 3. 规则的制定4. 推理方法的确定利用MATLAB 的Toolbox 工具1. 根据系统实际情况,选择e ,de 和u 的论域 e range : [-1 1] de range: [-0.1 0.1] u range: [0 2]2. e ,de 和u 语言变量的选取e 8个:NB,NM,NS,NZ,PZ,PS,PM,PBde 7个:NB,NM,NS,Z,PS,PM,PBU 7个:NB,NM,NS,Z,PS,PM,PL模糊规则确定eU NB NM NS NZ PZ PS PM PB PB PL PM NM NM NM NL NL NBPM PL PM NM NM NM NS NS NBPS PL PM NS NS NS NS NM NBZ PL PM PS Z Z NS NM NB deNS PL PM PS PS PS PS NM NBNM PL PL PS PS PM PM NM NBNB PL PL PL PM PM PM NM NB 隐含和推理方法的制定隐含采用‘mamdani’方法: ‘max-min‘推理方法,即‘min‘ 方法去模糊方法:面积中心法。
基于MATLAB的洗衣机模糊控制设计毕业设计

毕业设计基于MATLAB的洗衣机模糊控制设计摘要模糊控制洗衣机不仅实现了洗衣机的全面自动化,也提高了洗衣的质量,具有很强的实用性和较好的发展前景。
本设计的主要目的是设计一个比较合理的洗衣机模糊控制器,这种采用模糊控制的洗衣机能够通过洗衣桶内水的脏污程度和污渍性质(油污或者泥污)来自动预选水位和洗涤时间,以达到最佳的洗涤效果。
本文主要研究了基于MATLAB的洗衣机模糊控制。
首先介绍了模糊控制的基本原理,明确本设计中所要控制的变量,即水位和洗涤时间。
其次,定义了输入、输出模糊集,结合实际情况定义了隶属函数,然后建立模糊控制规则,给出模糊控制表,进行了模糊推理。
最后采用Simulink对该系统进行仿真,通过仿真曲线可以看出,文中采用的模糊控制方法是正确而有效的。
关键词:模糊控制;模糊集;隶属函数;控制规则;模糊推理AbstractFuzzy control of washing machine does not only achieve a fully automated washing machine, but also improve the quality of laundry; it has a strong practicality and a good development prospect.The main purpose of this design is to design a more reasonable washing machine fuzzy controller, fuzzy control of washing machine can automatically detect the dirty level of laundry bucket and the nature of stain (oil or sediment); it also can automatically pre-selected water level and washing time to achieve the best water quality.This paper mainly studies what based on the MATLAB fuzzy control of washing machines. First, it introduces the basic principles of fuzzy control, clearly the variables of this design to control, those are water level and washing time; Second, define the input and output fuzzy sets, and define the membership function combined the actual conditions, and then create the fuzzy control rules, give the fuzzy control table, then use these to the fuzzy reasoning. Finally, Simulink simulates the system; the simulation curves show that the text used in fuzzy control method is correct and effective.Key words:fuzzy control; fuzzy sets; the membership function; control rules; the fuzzy reasoning东北石油大学本科生毕业设计(论文)目录第1章前言 (1)1.1 选题的目的及意义 (1)1.2 国内外发展情况 (1)1.3 MATLAB简介 (2)1.4 模糊控制简介 (4)1.5 论文的主要内容 (4)第2章模糊控制器原理及设计 (6)2.1 模糊控制原理 (6)2.2 模糊控制系统的分类 (17)2.3 模糊控制器的设计 (18)第3章洗衣机的模糊控制 (21)3.1 洗衣机的时间控制 (21)3.2 洗衣机的水位控制 (28)3.3 本章小结 (31)结论 (32)参考文献 (33)致谢 (34)附录1 (35)附录2 (36)附录3 (37)附录4 (38)附录5 (40)第1章前言1.1 选题的目的及意义随着现代社会生活节奏的不断加快和人们生活水平的不断提高,人们对各种方便、快捷的家用电器需求量越来越大,为了提高人们的生活效率,全自动洗衣机应运而生。
模糊控制的Matlab仿真实例

THANK YOU
中心平均值去模糊化
去模糊化过程
04
Matlab仿真实例
输入输出变量定义
根据被控对象的特性,定义模糊控制系统的输入输出变量,如温度、湿度、压力等。
模糊化函数设计
为每个输入输出变量设计对应的模糊化函数,将实际值映射到模糊集合上。
模糊规则制定
根据专家知识和实际经验,制定模糊控制规则,如“如果温度过高,则调整冷却阀”。
输入输出关系
基于模糊逻辑运算和模糊集合的性质,建立输入和输出之间的映射关系。
推理规则
基于专家知识和经验,制定一系列的推理规则,用于指导模糊推理过程。
推理方法
常用的模糊推理方法包括最大值推理、最小值推理和中心平均值推理等。
模糊推理系统
02
Matlab模糊逻辑工具箱简介
模糊逻辑工具箱的功能
为了将模糊输出转换为实际输出,工具箱提供了多种去模糊化方法,如最大值去模糊化、最小值去模糊化和中心平均值去模糊化等。
性能指标选择
根据所选性能指标,采用合适的方法对模糊控制系统的性能进行评估,如极差分析法、方差分析法等。
性能评估方法
将模糊控制系统的性能与其他控制方法进行比较,如PID控制、神经网络控制等,以验证其优越性。
性能比较
01
02
03
模糊控制系统的性能评估
05
结论与展望
模糊控制对模型误差和参数变化具有较强的鲁棒性,能够适应不确定性和非线性系统。
输出模糊化
将模糊集合的输出映射到实际输出量上,同样采用隶属函数进行模糊化处理。
模糊化过程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
洗衣机模糊控制仿真
1.模糊控制背景
美国教授查徳(L.A.Zandeh)在1965年首先提出模糊集合的概念,由此打开了模糊数学及其应用的大门。
1974年英国教授马丹尼(E.H.Mamdani)首先将模糊集合理论应用于加热器的控制,创造了模糊控制的基本框架。
1980年,Sugeno开创了日本的首次模糊应用——控制一家富士电子水净化厂。
1983年他又开始研究模糊机器人。
随着模糊控制技术的不断发展,模糊控制逐渐被应用到日用家电产品的控制,例如电饭锅﹑照相机﹑吸尘器﹑洗衣机等。
2.仿真目的
本次仿真的主要目的是设计一个比较合理的洗衣机模糊控制器,它能够根据被洗涤衣物的污泥多少和油脂多少,综合得到洗涤时间,从而达到最佳的洗涤效果。
3.仿真方法
本次仿真借助matlab中集成的模糊控制工具箱,使用图形界面进行模糊控制器的设计。
最后随意给定几组输入,得到输出并作出简单分析。
4.模糊控制器的设计
4.1模糊控制器理论设计方法
①选择合适的模糊控制器类型;
②确定输入输出变量的实际论域;
③确定e,e
∆的模糊集个数及各模糊集的隶属度函数;
∆,u
④输出隶属度函数选为单点,可使解模糊简单;
⑤设计模糊控制规则集;
⑥选择模糊推理方法;
⑦解模糊方法。
4.2实际设计过程
①模糊控制器类型:选用两输入单输出模糊控制器,控制器输入为衣物的污泥和油脂,输出为洗涤时间。
②确定输入输出变量的实际论域:输入为Mud(污泥)和Grease (油脂),设置Range=[0 100](输入变化范围为[0,100]);输出为Time(洗涤时间),Range=[0 60](输出变化范围为[0,60])。
对应matlab 中模糊控制模块:
③确定模糊集个数及各模糊集的隶属度函数:将污泥分为3个模糊集:SD (污泥少)MD (污泥中)LD(污泥多);將油脂分为三个模糊集:NG (油脂少)MG (油脂中)LG (油脂多);将洗涤时间非为5个模糊集:VS (很短)S (短)M (中等)L (长)VL (很长)。
输入﹑输出隶属度函数都定为三角形隶属函数。
结合④输出隶属度函数选为单点,可使解模糊简单;定义污泥隶属函数如下 50)50()(x x SD -=μ 0≤x ≤50
50
x
0≤x ≤50
=Mad μ =)(x MD μ 50
)
100(x - 50<x ≤100
50)50()(-=x x LD μ 50<x ≤100
对应matlab 中隶属度函数仿真图如下:
由隶属函数设置污泥的3个模糊集参数为 [Input1] Name='Mud' NumMFs=3
MF1='SD':'trimf',[-50 0 50] MF2='MD':'trimf',[0 50 100] MF3='LD':'trimf',[50 100 150] 定义油脂隶属函数如下:
50)50()(y x SG -=μ 0≤y ≤50
50
y
0≤y ≤50
=Grease μ =)(x MG μ 50
)
100(y - 50<y ≤100 50)50()(-=y x LG μ 50<y ≤100
对应matlab中隶属度函数仿真图如下:
由隶属函数设置油脂3个模糊集参数为[Input2]
Name='Grease'
NumMFs=3
MF1='SG':'trimf',[-50 0 50]
MF2='MG':'trimf',[0 50 100]
MF3='LG':'trimf',[50 100 150]
定义输出时间隶属函数如下:
µVS(Z)=(10-Z)/10 0≤Z≤10
Z/10 0≤Z≤10
µS(Z)=
(25-Z)/15 10≤Z≤25
(Z-10)/15 10≤Z≤25
µM(Z)=
µ洗涤时间=(40-Z)/15 25≤Z≤40
(Z-25)/15 25≤Z≤40
µL(Z)=
(60-Z)/20 40≤Z≤60
µVL(Z)=(Z-40)/20 40≤Z≤60对应matlab中隶属度函数仿真图如下:
由隶属函数设置输出洗涤时间5个模糊集参数为
[Output1]
Name='Time'
NumMFs=5
MF1='S':'trimf',[0 10 25]
MF2='L':'trimf',[25 40 60]
MF3='VS':'trimf',[-10 0 10]
MF4='M':'trimf',[10 25 40]
MF5='VL':'trimf',[40 60 80]
⑤设计模糊控制规则:设计标准为污泥越多,油脂越多,洗涤时间越长;污泥适中,油脂适中,洗涤时间适中;污泥越少,油脂越少,洗涤时间越短。
建立模糊控制表如下:
洗涤时间Z
油脂y
SG MG LG
油脂X SD VS M L MD S M L LD M L VL
体现在matlab中模糊控制规则如下:
5.仿真实验
1.任給一输入[45,70],仿真结果如下,可以看出经过前面设计好的模糊控制器
得到输出时间为T=33.1。
2.输入为[0,0],仿真结果如下
分析:输出T=3.14,并不是0。
3.输入为[100,100],仿真结果如下
分析:输出为T=53.5,并不是60.
6.仿真结果综合分析
模糊推理方法常用的是Mamdani模糊推理法,由上面仿真结果能够看出虽然定义输出时间的变化范围是[0,60],但是仿真过程中并不能达到理想的最大最小输出时间。
这是因为在清晰化的过程中该仿真工具箱是采用一定的算法得到输出时间。
上面的仿真中总共设定了9条规则,当给定某一输入时,也就是给定了Mad与Grease的假定值,将该输入分别与9条规则中各自设定的隶属函数进行对应,并将两个输入综合作用的结果与相应规则中的输出时间Time对应得到一个输出结果,从而总共可以得到9个输出时间Time的隶属函数图,由仿真图就可以很方便的看到这个过程。
将9个输出按一定推理法整合在一个图上,这时再用到清晰化的方法比如最大隶属度法,中心法,加权平均法等进行解模糊,我们常使用的方法是取所有输出的中心或重心,最终确定一个输出时间,本仿真中最终输出就是最终洗涤时间Time。
另一方面,从输入分别为[0,0]和[100,100],输出时间为T=3.14和T=53.5可以看到,上面隶属函数的设定还是比较合理的。