最新两相四拍步进电机
两相四线励磁式步进电机的工作原理

两相四线励磁式步进电机的工作原理直接驱动型两相四线励磁式步进电机是一种常用的电机类型,其工作原理主要基于磁场的相互作用和磁力耦合原理。
下面详细介绍两相四线励磁式步进电机的工作原理。
具体来说,两相四线励磁式步进电机的工作原理主要分为两个步骤:1.步进驱动原理:
两相四线步进电机的两个线圈分别接到步进电机驱动器的两个输出相位上,一般为A相和B相。
驱动器根据输入的控制信号产生特定的输出电流,这个电流会在线圈中形成磁场。
以A相和B相线圈的通电情况为例:
-当A相线圈通电时,会在转子上形成一个磁场,此时转子会被磁场吸引,使得转子的一个极向A相线圈移动。
-接着,当A相线圈断电,B相线圈通电时,转子的磁极会向B相线圈靠近,从而使得转子继续移动。
-反复循环A相和B相线圈的通电和断电操作,就可以实现步进电机的转动。
2.电磁耦合原理:
在实际运行中,为了使线圈产生的磁场与转子上的磁场相互作用更加有效,通常会在步进电机系统中加入转子上的永磁体,也可以通过其他方式加入磁场。
当线圈通电时,线圈的磁场将与永磁体形成磁力耦合。
这种耦合作用会产生一个力矩,使得转子受到一个力的作用,从而转动到与线圈磁场相对应的位置。
总结起来,两相四线励磁式步进电机的工作原理主要基于磁场的相互作用和磁力耦合原理。
通过对线圈通电和断电的控制,以及线圈磁场与转子上的磁场之间的相互作用,就可以实现步进电机的旋转运动。
这种步进电机在控制精度、转速范围和扭矩等方面具有较好的性能,广泛应用于工业控制、自动化设备等领域。
2相4线步进电机 驱动原理

2相4线步进电机驱动原理2相4线步进电机是一种常见的步进电机类型,它由两组线圈组成,每组线圈有两根引线。
它具有较高的分辨率和较低的振动噪音,广泛应用于打印机、3D打印机、数控机床等领域。
驱动原理是指如何实现步进电机的精确控制和转动。
1.电路结构:2相4线步进电机的驱动电路通常采用H桥电路。
H桥电路由4个功率晶体管(MOSFET)组成,分为上下两个桥,每个桥由两个晶体管组成。
上桥、下桥分别与步进电机的两个线圈相连。
2.相序控制:步进电机的转动是通过给线圈施加电流来实现的。
相序控制是指按照一定的顺序给线圈施加电流,以使电机按照设定的步进角度转动。
2相4线步进电机的相序控制有两种方式:全步进控制和半步进控制。
全步进控制是指每次给线圈施加一个相位的电流,使得电机转动一个步进角度。
如A相线圈为高电平,B相线圈为低电平,则电机转动一个步进角度。
然后保持两个相位的电平状态不变,电机保持静止。
半步进控制是在全步进控制的基础上,通过改变线圈的电流方向和大小,使电机转动一个半步进角度。
首先给A相线圈施加高电平,电机转动一个步进角度,然后将A相线圈变为低电平,同时给B相线圈施加高电平,电机再转动一个步进角度。
这样,电机将以更小的角度精确转动。
3.驱动方式:步进电机的驱动方式有两种:双极性和单极性。
双极性驱动是指在步进电机的两个线圈中,每个线圈有两个施加电流的方向,即正向和反向。
这种驱动方式可以实现较高的转动力矩。
单极性驱动是指每个线圈只有一个施加电流的方向,另一个方向不施加电流。
这种驱动方式可以简化驱动电路的设计,但转动力矩相对较小。
4.驱动器选择:对于2相4线步进电机,需要选择合适的驱动器。
驱动器是电机与控制信号之间的接口电路,可以根据输入信号控制电机转动。
驱动器通常具有以下功能:-产生恰当的相序控制信号-控制每个线圈的电流-限制电流的峰值和保护电机常见的驱动器有步进电机芯片、步进电机驱动板等。
在选择驱动器时,需要考虑电机的电流和电压要求、控制信号的格式和接口、驱动器的工作温度等因素。
两相四线步进电机工作原理
两相四线步进电机工作原理
两相四线步进电机是一种在控制信号的驱动下精确旋转的电机。
它的工作原理涉及到电机的内部结构和驱动电路。
首先,两相四线步进电机由两个独立的线圈组成,每个线圈被连接到一个独立的电源。
线圈中的电流通过控制信号的驱动而改变,从而产生由永磁体产生的磁场。
这些磁场作用在电机的转子上,引起转子的旋转。
其次,步进电机的转子是多极的,通常由永磁材料制成。
每个极对应一个步进角度,也就是电机在一个完整的旋转周期内的运动距离。
然后,步进电机的驱动电路通常是由直流电源和电流控制器组成。
控制器接收来自外部控制信号的输入,并将其转化为适当的电流控制信号,供给到电机的线圈上。
通过控制信号的准确调节,电机可以实现精确的旋转步进。
最后,在工作过程中,控制信号进入驱动电路,由电流控制器将电流传送到线圈上,产生磁场并驱动转子转动。
不断重复这一过程,电机可以以一定的步进角度进行连续准确的旋转。
总之,两相四线步进电机的工作原理涉及到线圈中的电流控制和磁场的生成,通过外部控制信号的调节,实现精确旋转的目的。
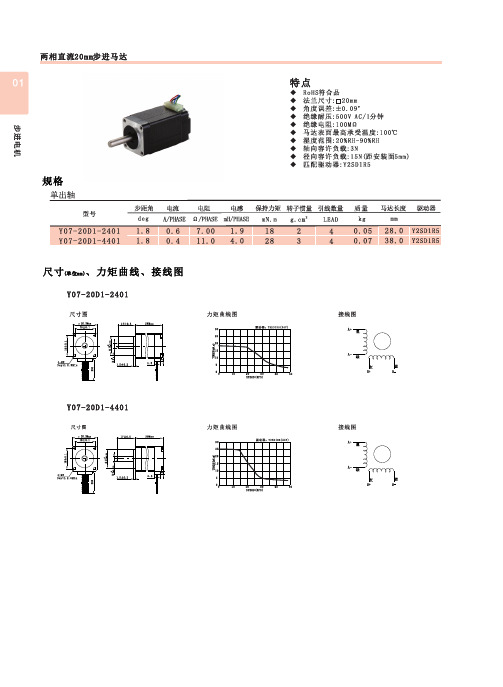
两相直流步进电机型号大全及参数
2
g.cm LEAD
kg
mm
Y 09 - 59 D3 - 74 30 - P 1 . 8 3.20 01 .90 68 6. 80 23 . 93 1 16 030 48 Y 09 - 59 D3 - 75 36 - P 1 . 8 3.20 01 .96 60 163..82 26 . 95 13 12 00 48 Y 09 - 59 D3 - 76 55 - P 1 . 8 3.20 01 .9 62 166..84 29 . 92 14 18 00 48
11.5±0.2
1.5 90°
L±1 9±0.3
型号 Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P
马达 长 度( L) 71.1 101.5 132
11.5±0.2
300 φ
4-φ 5
φ73.025±0.025
12.07-0.013
力矩曲线
Y09-59D3-7430-P
4 0.62 46.3 4 0.88 55.8 4 1.4 87.8
驱动器
Y2SD2 Y2SD2 Y2SD2
机 械 尺 寸(单位mm)
□60 4 7 . 1 4±0 . 1
24.5±1 1.6 7
4 7 . 1 4±0 . 1
0
φ38.1 -0.04
0
φ8-0.013
20±0.2 K
K
φ4.5 33
0
0
5
10
15
20
25
SPEED(RPS)
TORQUE(N.m)
Y09-59D3-7655-P
10.8
2 4 V 4 8 V 6 0V 驱 动 器 :Y 2 S D 3 (并 联6 A )
两相四线步进电机

两相四线励磁式步进电机工作道理本章将介绍在嵌入式平台UP-NETARM2410-S中步进电机的实现.步进电机在各个范畴诸如机械人.智能掌握.工业掌握等方面都有着普遍的运用空间,本章侧重介绍步进电机的工作道理及编程实现步进电机驱动的办法,主要内容如下:l 步进电机的概述l 步进电机的工作道理l 和微处理器的总线衔接方法l 驱动程序的编程l Linux 下用软件的办法实现步进电机的脉冲分派,用软件的办法代替硬件的脉冲分派器1.步进电机概述步进电机是一种可以或许将电脉冲旌旗灯号转换成角位移或线位移的机电元件,它现实上是一种单相或多雷同步电念头.单相步进电念头有单路电脉冲驱动,输出功率一般很小,其用处为渺小功率驱动.多相步进电念头有多相方波脉冲驱动,用处很广.运用多相步进电念头时,单路电脉冲旌旗灯号可先经由过程脉冲分派器转换为多相脉冲旌旗灯号,在经功率放大后分离送入步进电念头各相绕组.每输入一个脉冲到脉冲分派器,电念头各相的通电状况就产生变更,转子会转过必定的角度(称为步距角).正常情形下,步进电机转过的总角度和输入的脉冲数成正比;持续输入一定频率的脉冲时,电念头的转速与输入脉冲的频率保持严厉的对应关系,不受电压摇动和负载变更的影响.因为步进电念头能直接吸收数字量的输入,所以特殊合适于微机掌握.步进电机迁移转变运用的是脉冲旌旗灯号,而脉冲是数字旌旗灯号,这恰是盘算机所擅长处理的数据类型.从20世纪80年月开端开辟出了专用的IC驱动电路,今天,在打印机.磁盘器等的OA装配的地位掌握中,步进电机都是不成缺乏的构成部分之一.总体上说,步进电机有如下长处:1.不须要反馈,掌握简略.2.与微机的衔接.速度掌握(启动.停滞和反转)及驱动电路的设计比较简略.3.没有角累积误差.4.停滞时也可保持转距.5.没有转向器等机械部分,不须要保养,故造价较低.6.即使没有传感器,也能准肯定位.7.根椐给定的脉冲周期,可以或许以随意率性速度转__________动.但是,这种电机也有自身的缺陷.8.难以获得较大的转矩9.不宜用作高速迁移转变10.在体积重量方面没有优势,能源运用率低.11.超出负载时会损坏同步,速工作时会发出振动和噪声.1.2 步进电机的种类今朝经常运用的步进电机有三类:1.反响式步进电念头(VR).采取高导磁材料构成齿状转子和定子,其构造简略,临盆成本低,步距角可以做的相当小,但动态机能相对较差.2.永磁式步进电念头(PM).转子采取多磁极的圆筒形的永磁铁,在其外侧设置装备摆设齿状定子.用转子和定子之间的吸引和排挤力产生迁移转变,迁移转变步的角度一般是7.50.它的出力大,动态性能好;但步距角一般比较大.3.混杂步进电念头(HB).这是PM 和VR的复合产品,其转子采取齿状的稀土永磁材料,定子则为齿状的崛起构造.此类电机分解了反响式和永磁式两者的长处,步距角小,出力大,动态机能好,是机能较好的一类步进电念头,在盘算机相干的装备中多用此类电机.2.步进电机的工作道理现以反响式三相步进电机为例解释其工作道理.三相步进电机的定子铁心上有六个外形雷同的大齿,相邻两个大齿之间的夹角为60 度.每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为一相绕组.各个大齿的内概况上又有若干个平均散布的小齿.转子是一个圆柱形铁心,外概况上圆周偏向平均的布满了小齿.转子小齿的齿距是和定子雷同的.设计时应使转子齿数能被二整除.但某一相绕组通电,而转子可自由扭转时,该相两个大齿下的各个小齿将吸引邻近的转子小齿,使电念头迁移转变到转子小齿与该相定子小齿对齐的地位,而其它两相的各个大齿下的小齿肯定和转子的小齿分离错开正负1/3 的齿距,形成“齿错位”,从而形成电磁引力使电念头持续的____苔K_迁移转变下去.和反响式步进电念头不合,永磁式步进电念头的绕组电流请求正,反向流动,故驱动电路一般要做成双极性驱动.混杂式步进电念头的绕组电流也请求正,反向流淌,故驱动电路平日也要做成双极性.2.1.步进电机的励磁方法步进电机有2相.4相和5相电机.在4相电机中有4组线圈,若电流按次序经由过程线圈则使电机产生迁移转变.2相电机中有2 组线圈.从图9.3可以发明,在各线圈中引出中央端子,是以若以中央端子为基准即可实现4相,称这4为A.B.C.D 的励磁相.本试验运用的就是这种方法的4相电机,而励磁方法中有1 相(单向)励磁.2 相(双向)励磁和1-2 相(单-双向)励磁方法.此外,假如迁移转变的偏向不准确,可以瓜代1.2端子或3.4号端子(1). 1相励磁方法按ABCD的次序老是仅有一个励磁相有电流畅过,是以,对应1个脉冲信号电机只会迁移转变一步,这使电机只能产生很小的转矩并会产生振动,故很少使用.A B C DT1 1 0 0 0T2 0 1 0 0T3 0 0 1 0T4 0 0 0 1图2.T1-T4暗示脉冲周期;ABCD暗示电机的各相,1暗示此时有一个脉冲,0暗示没有(2). 2相励磁方法按AB.BC.CD.DA的方法老是只有2相励磁,经由过程的电流是1相励磁时经由过程电流的2倍,转矩也是1相励磁的2 倍.此时电机的振动较小且应答频率升高,今朝仍普遍运用此种方法.A B C DT1 1 1 0 0T2 0 1 1 0T3 0 0 1 1T4 1 0 0 1图3.T1-T4暗示脉冲周期;ABCD暗示电机的各相,1暗示此时有一个脉冲,0暗示没有脉冲(3). 1-2相励磁方法即试验中所有的励磁方法,它按A.AB.B.BC.C.CD.D.DA的次序瓜代进行线圈的励磁.与前述的2个线圈励磁方法比拟,电机的转速是原来的1/2,应答频率规模变成本来的2倍.转子以滑动的方法迁移转变.A B C DT1 1 0 0 0T2 1 1 0 0T3 0 1 0 0T4 0 1 1 0T5 0 0 1 0T6 0 0 1 1T7 0 0 0 1T8 1 0 0 1图4.T1-T8暗示脉冲周期;ABCD暗示电机的各相,1暗示此时有一个脉冲,0暗示没有脉冲3.与微处理器的衔接方法步进电机其实不是直接与CPU相连的.因为开辟板上外部装备许多,各功效模块与微处理器的衔接方法有专用线路,局部总线与扩大总线.3.1 局部总线与扩大总线局部总线与微处理器直接相连,扩大总线经由过程一个总线掌握器74LVCH6245与局部总线相连.从CPU 出来的数据.地址.读写掌握等旌旗灯号构成局部总线.NAND FLASH.SDRAM和网卡芯片AX88796 直接挂在局部总线上的.局部总线经过四片74LVCH16245 驱动后作为扩大总线引到其他外设以及168Pin 扩大槽.因为数据线是双向的,所以16245芯片必须有偏向掌握旌旗灯号,这里采取经过隔离后的写掌握旌旗灯号OE 作为数据线地点16245 芯片的偏向掌握线.当OE有用时16245 芯片把扩大总线上的数据传输到局部总线上;当OE无效时反之.别的,必须留意,当体系对局部总线上的芯片读数据时OE 一样会起作用,如许就必须对局部总线和扩大总线进行总线仲裁,这里是外设所具有的四个片选旌旗灯号nGCS1.3.4.5 用74HC21 相与后作为数据线地点的16245芯片的输出使能掌握线,只有当体系对扩大总线读操纵,也就是上述四个片选之一有用时,16245 才干对局部总线输出数据,不然无论OE 若何都呈现高阻态.如下图:注:LDATA暗示局部总线的数据线;DATA暗示扩大总线的数据线.74LVCH16425芯片共有四块,限于篇幅仅举一片为例,其它三片芯片,一片用于数据线的低位衔接,两片用于地址线的衔接.注:因为片选线运用的负逻辑电平有用,所有此处用的是与门扩大总线衔接在芯片74HC573上,扩大总线的DATA0-DATA7分离接在74HC573的八个数据输入端上.74HC573芯片是由8个三态门构成的寄存器,它起到临时保管信息和隔离总线的感化.芯片的输出I\O0—I\O3用于D\A数模转换,I\O4—I\O7用于步进电机的掌握.描写:这个芯片采取的是八进位的D触发器,它可以驱动电容式或电阻式的负载.是以它特殊合适运用于缓冲存放器.IO端口.双向的总线掌握器.和操纵存放器.当存放器的使能端(LE)为高电日常平凡,Q输出端和________D输入端一一对应;当LE为低电日常平凡,输出端管脚Q输出的是存放器中已被设定的值.当一个能开启缓冲功效的负逻辑管脚(OE)为0时,无论是在正常逻辑状况照样在高阻抗状态下,都能放置八位的输出数据.在高阻抗状况下.输出并没有负载或者进行掌握总线.高阻态和改良的总线驱动可以在不拉起元件的情形下掌握总线传输.OE端其实不影响存放器内部的操纵.当输出端呈高阻状况时旧的数据可以被保管或者新的数据进行输入.74HC573芯片的输出I\O4—I\O7用于用来驱动步进电机的迁移转变.数据线要起首接在步进电机模块的一个接口上.接口对旌旗灯号进行放大,使之可以或许驱动步进电机.放大后的旌旗灯号就可以直接的来使步进电路进行工作了.3.4.开辟板中的步进电机本开辟板中运用的步进电机为四相步进电机.转子小齿数为64.体系中采取四路I/O 进行并行掌握,ARM 掌握器直接发出多相脉冲旌旗灯号,在经由过程功率放大后,进入步进电机的各相绕组.如许就不再须要脉冲分派器.脉冲分派器的功效可以由纯软件的办法实现如上图所示.四相步距电机的掌握办法有四相单四拍,四相单.双八拍和四相双四拍三种掌握方法.步距角的盘算公式为:θb=3600/mCk个中:m 为相数,掌握办法是四相单四拍和四相双四拍时C 为1,掌握办法是四相单.双八拍时C 为2,Zk为转子小齿数.本体系中采取的是四相单.双八拍掌握办法,所以步距角为360°/512.但步进电机经由一个1/8 的减速器引出,现实的步距角应为360°/512/8.开辟平台中运用EXI/O 的高四位掌握四相步进电机的四个相.按照四相单.双八拍掌握办法,电机正转时的掌握次序为A→AB→B→BC→C→CD→D→DA.EXI/O 的高四位的值拜见下表:十六进制二进制通电状况1H 0001 A3H 0011 AB2H 0010 B6H 0110 BC4H 0100 CCH 1100 CD8H 1000 D9H 1001 DA表5. 电机正转时,EXIO的高四位的值反转时,只要将掌握旌旗灯号按相反的次序给出即可.可以经由过程宏SETEXIOBITMASK(bit,mask)(EXIO.h)来设置扩大I/O 口,个中mask 参数为0xf0.本试验使作的是1-2相励磁方法,还可以运用1相励磁方法和2相励磁方法.*1相励磁方法的次序是ABCD,是以只要设置数组char stepdata[]={0x10,0x20,0x40,0x80} 即可*2相励磁方法的次序是AB,BC,CD,DA,是以只要设置数组char stepdata[]={0x30,0x60,0xc0,0x90} 即可*要实现电机的反转,只需将上面数组的值按相反的次序分列即可4.驱动程序的编程驱动程序采取C说话进行编程,下面是驱动程序中几个重要的函数. static intdo_stepmotor_run(char phase) //经由过程挪用这个函数使步进电机转起来{unsigned intbak; //变量bak用于存放从存放器中读出的值bak = readw(s3c2410_exio_base); //挪用内核函数将基地址为s3c2410_exio_base存放//器的值读出并放在bak中DPRINTK_STEP("s3c2410_exio_base content is %x\n", bak); //调试输出语句tiny_delay(5); //延时函数,有延时功效bitops_mask_bit(phase, 0xf0, &bak);//消除4-8位然后再设置phase传进来的位(也是4-8位)DPRINTK_STEP("s3c2410_exio_base content is%x\n", bak); //调试输出语句tiny_delay(5);writew(bak, s3c2410_exio_base); //挪用内核函数将bak的值写入响应的存放器中bak = readw(s3c2410_exio_base); //再次将存放器的值读出DPRINTK_STEP("s3c2410_exio_base content is %x\n", bak); //运用调试语句再次将修正后的存放器中的值输出,以验证其准确性tiny_delay(5);DPRINTK_STEP("\n");return 0;}驱动程序重要经由过程上面这个函数来使步进电机迁移转变.掌握电机的是一个存放器(地址是s3c2410_exio_base=0x08000100),只要给它恰当的值电机就可以活动起来.这个函数经由过程传递变量phase从运用程序获得数据.然后运用函数readw()把存放器的值就读出并送给bak;经由过程函数bitops_mask_bit()修正bak的值;最后由writew()写回到存放器中.5.运用程序的编程1.步进电机模块步进电机模块和DA 模块是运用Bank1 地址空间扩大出来的IO 口.配合运用驱动s3c2410-exio.o.在驱动程序中,与步进电机相干的重要在函数s3c2410_exio_ioctl:2.对应的运用源程序#include <stdio.h>#include <fcntl.h>#include <string.h>#include <sys/ioctl.h>#define STEPMOTOR_IOCTRL_PHASE 0x13staticintstep_fd = -1;char *STEP_DEV="/dev/exio/0raw"; //界说一个指针指向步进电机的驱动程序/********* A, AB, B, BC, C CD, D, DA ***/charstepdata[]={0x10,0x30,0x20,0x60,0x40,0xc0,0x80,0x90};//各个相位对应的值void Delay(int t) //延时函数{int i;for(;t>0;t--)for(i=0;i<400;i++);}/****************************************************************/int main(intargc, char **argv){int i = 0;if((step_fd=open(STEP_DEV, O_WRONLY))<0){printf("Error opening /dev/exio/0raw device\n");return 1;}/*打开装备的驱动程序,因为LINUX把所有的装备都模仿成文件. step_fd=open(STEP_DEV,0_WRONLY)现实挪用的函数为:staticint s3c2410_exio_open(structinode *inode, struct file *filp)//驱动程序中的装备打开程序*/for (;;) {for (i=0; i<sizeof(stepdata)/sizeof(stepdata[0]); i++) { ioctl(step_fd, STEPMOTOR_IOCTRL_PHASE,stepdata[i]);}/*程序进入一个逝世轮回,如许可以使电机在没有工资停滞的状况下,一向的迁移转变下去.*第二层for语句轮回一次即电机迁移转变一周.函数ioctl()对应函数*s3c2410_exio_ioctl()*而这个函数最终将挪用函数do_stepmotor_run((char)arg);使步进电机迁移转变起来.*/printf("Delay(100)\n");Delay(100);}close(step_fd); //程序停滞时封闭装备printf("Step motor start running!\n");return 0; }__。
[整理]2相4线步进电机
![[整理]2相4线步进电机](https://img.taocdn.com/s3/m/bb38b10d87c24028915fc3f0.png)
通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b 组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。
2相四线,四相五线,四相六线步进电机接线及驱动方法

2相四线,四相五线,四相六线步进电机接线及驱动方法步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线 的步进电机,线的颜色不一样。
特别是国外的步进电机那么,步进电机接线应该用万用表打表。
~B 是一组b o 不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看 A 和~A 之间,B 和B~之间有没有公共端com 抽线。
如果a 组和b 组各自有一个com 端,则该步进电机六线,如果 a 和b 组的公 共端连在一起,则是 5 线的。
但是不同公司生产B 和~B 是联通。
那么, A 和~A 是一组a , B 和通过上图可知,A, ~A 是联通的,步进电机内部构造如下图所以,要弄清步进电机如何接线,只需把 a 组和 b 组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N S磁场的激磁线圈对数。
常用m表示。
拍数: 完成一个磁场周期性变化所需脉冲数或导电状态用n 表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD- DA-AB四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用9表示。
B =360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
两相四拍步进电机波形
两相四拍步进电机波形两相四拍步进电机,也称为四拍步进电机,是一种常见的步进电机类型。
它由两个相互垂直的驱动线圈组成,每个线圈都有两个相位,即A相和B相。
通过改变不同线圈的通电顺序和极性,可以控制步进电机的运动。
在两相四拍步进电机中,波形是指电流在不同线圈之间的变化形式。
常见的波形类型有正弦波和方波。
正弦波形:正弦波形是指电流在两个线圈之间以正弦函数的形式变化。
它的优点是电流变化平稳,减少了振动和噪音,也减少了对步进电机的磨损。
正弦波形的控制更加精确,可以实现步进电机的微步控制。
然而,正弦波形需要更复杂的控制电路和更高的驱动功率,所以在实际应用中并不常见。
方波形:方波形是指电流在两个线圈之间以方波的形式变化。
它的优点是控制简单,成本低。
方波形的控制电路较简单,只需改变线圈的通电顺序和极性即可。
方波形的速度控制十分灵活,可实现高速运动。
然而,方波形会产生较大的振动和噪音,也容易引起磨损,因此对步进电机的寿命有一定影响。
在实际应用中,由于成本和控制的简易性考虑,方波形是最常见的两相四拍步进电机波形。
它的波形形态可以分为四个相位:A相正极,A相负极,B相正极和B相负极。
当A相通电时,步进电机的转子会朝着特定方向转动;当B相通电时,转子则反向旋转。
通过改变A相和B相的通电顺序和极性,可以实现步进电机的不同运动和转向控制。
总结起来,两相四拍步进电机的波形可以是正弦波形或者方波形。
正弦波形具有平稳性和精确性的优点,但成本和控制复杂度较高;方波形则更加常见,具有简单控制和成本低的特点,但容易引起振动和噪音。
在实际应用中,选择合适的波形类型要根据具体需求和系统成本来决定。
两相混合式步进电机及其驱动技术
▪ 一般称单四拍和双四拍工作方式为整步距方式; 单、双八拍工作方式为半步距方式。
▪ 步进电机中定子磁场和转子磁场旳相互作用产生 转矩:
▪ 定子磁势IW(安匝),I为相电流,W为绕组匝 数。
▪ 转子磁势是由转子磁钢产生旳,它是一种常数。 ▪ 所以当定子线圈匝数、转子磁钢磁性能及定、
ia
AB
BA AB BA
t
ib
t 图6-8
▪ 整步运营时,绕组电流每90°电角度转过一种整步距。
▪ 四细分时电流电角度为 90/4=22.5 °。 以22.5°旳角
度递增从0°到360°共有16个电角度;所相应旳cos和
sin值求出并整量化后作成数据表放在存储器中。
31
32
D/A转换器
T1
T2
D1 D2
A0
u D0
B
A1
u D1
A
A2 A3
u D2
B
u D3
A
A4
A4接地时,可选通00H~0FH之 间旳十六个地址。该 地址空间存
储了循环旳单、双八拍运动方式 旳数据表 A4接5V时,可选通10H~1FH 之间旳十六个地址。该地址空间 存储了循环旳双四拍运营方式2旳3 数据表。
3)功率放大—单电压驱动方式
T1
Us
T2
D1
D2
电流放大
ia A BAB
t
uA
T3
A
A
T4
uA
ib
D3
D4
t
Vi -
Vg
+
单稳
图6-6
a
b
c
i
d
两相四拍步进电机

仪器设备
操作要求及评分标准
额定分数
评定分数
1
FX2N系列PLC一台及其配套设备、软件
1
画出I/O图和梯形图
25分
2
触摸屏一台及其配套设备、软件
2
两相四拍方式
5分,每拍分共20
额定考试时间
120分钟
3
每步间隔是2秒
10分
4
触摸屏实现正转
两相四拍步进电机步进电机有哪些品牌步进电机型号步进电机驱动器步进电机两相步进电机两相四拍两相两拍步进电机两相步进电机驱动器两相混合式步进电机
模块6、用DECO指令编程实现两相步进电机的控制,要求如下:(1)按照两相四拍方式运行;每步间隔时间是2秒;
(2)触摸屏上能实现步进电机的正转、反转和停止。能显示正转、反转的步数,无论哪个方向,当步数是1000时都要停机;
5分
开始时间
5
触摸屏实现反转5分6触摸屏实现停止5分
结束时间
7
能显示正转步数
分5
8
能显示反转步数
5分
考评员签名
9
当步数到时能停机
5分
10
操作熟练
分15
分配图:I/O
DC24V
COM1 X0正转A+ Y0
B+ Y1
X1反转A- Y2
B-
Y3
停止X2 COM2
Y4
COM
Y5 Y6 Y7
梯形图:
触摸屏界面:
51单片机控制两相四线步进电机

源程序如下:ENA EQU P1.0 ENB EQU P1.1IN1 EQU P1.2IN2 EQU P1.3IN3 EQU P1.4IN4 EQU P1.5 SWITCH EQU P3.3 FAST EQU P3.6 SLOW EQU P3.5CYCLENUM EQU 50H ;存放对应定时循环次数TEMP EQU 53H ;存放按键次数。
初值为5,每按加速叠加1,按减速递减MARK EQU 56H ;启动停止标识LEDBUF EQU 57HORG 0AJMP START;*****************检测是否开启启动电机键***************************START:MOV P0,#0 ;清显示SETB MARK ;预启动电机工作,标识为1MOV TEMP,#5 ;开始工作于5HzMOV CYCLENUM,#01H ;循环1次JNB SWITCH,NEXT ;按键按下?SJMP START ;没有返回继续检测NEXT:CALL DELAY ;消抖确认JNB SWITCH,MAIN ;再次确认按键,不为1说明按键按下SJMP START ;没有按下,继续检测;*****************开始运行电机***************************************MAIN:MOV A,TEMPMOV DPTR,#TAB4MOVC A,@A+DPTRMOV LEDBUF,A ;送显示CALL DISPLAYLOOP:JB MARK,WORK ;检测运行标识是否为1,为1则继续运行,为0则停止运行NOTWORK:CLR ENACLR ENBSJMP STARTWORK:MOV P1,#000010111B ;步进电机运行方式为两相四拍CALL TIMERCALL TESTSTOPMOV P1,#000011011B ;第二拍CALL TIMERCALL TESTSTOPMOV P1,#000101011B ;第三拍CALL TIMERCALL TESTSTOPMOV P1,#000100111B ;第四拍CALL TIMERCALL TESTSTOPCALL TESTKEYSJMP MAIN;***************************检测是否有按键按下************************TESTKEY:SETB FASTSETB SLOWNEXT1:JNB FAST,YES2NEXT2:JNB SLOW,YES3SJMP RETURN ;都没有键按下,则返回YES2:MOV A,TEMP ;FAST按下,若此时temp等于9,则保持速度不变,若小于则加1 CJNE A,#9,CANFASTDEC ACANFAST:INC AMOV TEMP,ASJMP RETURNYES3:MOV A,TEMPCJNE A,#1,CANSLOWINC ACANSLOW:DEC AMOV TEMP,ARETURN:RETTESTSTOP:SETB SWITCHJNB SWITCH,GOSJMP ENNDGO:CALL DELAYJNB SWITCH,YESSTOPSJMP ENNDYESSTOP:CPL MARKENND:RET;***********************定时器设置******************* TIMER:MOV TMOD,#10H ;T1工作于定时方式1CALL TIMERSETSETB TR1SETB EASETB ET1 ;启动定时器工作WAIT:JBC TF1,HERESJMP WAIT ;定时未到继续等待HERE:DJNZ CYCLENUM,TIMER ;循环次数未满继续定时MOV A,TEMPMOV DPTR,#TAB3MOVC A,@A+DPTRMOV CYCLENUM,ARETTIMERSET:MOV A,TEMPMOV DPTR,#TAB1 ;获取定时器高位MOVC A,@A+DPTRMOV TH1,A ;存放至定时器高位MOV A,TEMPMOV DPTR,#TAB2MOVC A,@A+DPTR ;获取定时器定位MOV TL1,A ;存放至定时器低位RET;***********************50ms延时**********************DELAY:MOV R0,#100DL1:MOV R1,#10DJNZ R1,$DJNZ R0,DL1RET;************显示子程序****************************DISPLAY:CLR P2.7CLR P2.6CLR P2.5SETB P2.4 ;关闭高三位,保留个位MOV P0,LEDBUFRETTAB1: DB 15H,0AH,07H,05H,04H,03H,03H,02H,02H ;定时器高位TH1TAB2: DB 0B3H,0D9H,3BH,6CH,57H,0A5H,19H,0B6H,69H ;定时器地位TL1 TAB3: DB 01H,01H,01H,01H,01H,01H,01H,01H,01H ;循环次数CYCLENUM TAB4: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ;数码显示0~9。
两相4线步进电机驱动

为一个转向。
ab - ab~ - a~b~ - a~b
为反向。
8拍方式的 G
H(时序)
A
11000001
A-
00011100
B
01110000
B-
00000111
这里用的是8拍的方式。程序:
/*** ******************************************************************* **程序功能: **芯片型号:STC11F16XE **晶振频率:22.1184M **备注说明: *******************************************************************/ //以下为所需的头文件 //#include<absacc.h> //#include<string.h> //#include<stdio.h> //#include <INTRINS.H> #include <reg52.H> //定义关键字方便使用 #define uchar unsigned char #define uint unsigned int
**函数原型:main()
**函数功能: **输入参数:无 **输出参数:无 **备注说明:完成程序的主要功能
*******************************************************************/ main() {
unsigned char c; while(1) //主循环 {
void delay(void)
{ unsigned char a,b,c; for(c=18;c>0;c--) for(b=19;b>0;b--) for(a=23;a>0;a--);
两相四拍步进电机波形

两相四拍步进电机波形步进电机是一种特殊的电机,它的转动是通过电流的不断变化来实现的。
而步进电机的转动状态可以用波形图来表示,其中最常见的是两相四拍步进电机波形。
下面将详细介绍两相四拍步进电机波形的特点和工作原理。
一、两相四拍步进电机波形的特点两相四拍步进电机波形是指步进电机在一个完整的周期内,电流的变化情况。
它的特点主要有以下几点:1. 波形周期:两相四拍步进电机波形的周期是一个完整的电机转动周期,通常以角度来表示。
在一个周期内,电机会完成一定的转动角度,然后重新回到起始位置。
2. 相位差:两相四拍步进电机波形中的两个相位之间存在一定的差距,通常为90度。
这个相位差是步进电机正常工作的基础,它使得电机能够顺时针或逆时针旋转。
3. 电流变化:在两相四拍步进电机波形中,电流是按照一定的规律变化的。
电流的变化决定了电机的转动方向和速度。
一般来说,电流的变化是通过驱动电机的控制器来实现的。
二、两相四拍步进电机波形的工作原理两相四拍步进电机波形的工作原理是通过改变电流的方向和大小来实现的。
具体步骤如下:1. 步骤一:确定起始位置。
步进电机的起始位置是一个重要的参考点,它确定了电机的转动方向和角度。
在起始位置时,两个相位的电流都为零。
2. 步骤二:改变电流方向。
在起始位置的基础上,通过改变电流的方向,可以使电机顺时针或逆时针旋转。
改变电流方向的方式有多种,最常见的是使用H桥驱动器。
3. 步骤三:改变电流大小。
电流的大小决定了电机的转动速度。
通过改变电流的大小,可以控制电机转动的快慢。
一般来说,电流越大,电机转动的速度越快。
4. 步骤四:循环执行。
在完成一次电机转动后,需要重新回到起始位置,然后继续执行下一次转动。
这样就形成了一个完整的电机转动周期。
三、两相四拍步进电机波形的应用两相四拍步进电机波形在实际应用中具有广泛的用途。
它常被应用于需要精确定位和控制转动角度的场合,如机械臂、数控机床、打印机等。
步进电机的波形可以通过控制器实时调整,以满足不同的需求。
两相四线步进电机工作原理

两相四线步进电机工作原理
两相四线步进电机是一种常用的电动机,它的工作原理可以简单描述如下:
1. 两相电机:步进电机一般由两个交替工作的相组成,每个相两线相连。
这两个相分别被称为A相和B相。
2. 四线连接:每个相都有两根线连接到电机控制器中。
常见的连接方式有两种:全/半桥驱动和杂散电流抑制。
3. 电机驱动信号:电机控制器向电机的A相和B相分别提供信号,信号可以是脉冲或方波。
4. 磁极切换:当A相接收到脉冲或方波信号时,它会生成一个磁场,吸引电机中的磁极。
同样地,B相接收到信号时也会生成磁场。
5. 磁场交替:通过控制电机控制器发送的脉冲信号,A相和B 相的磁场会交替生成和消失。
这样,电机中的磁极也会随之不停地切换。
6. 感应转子:电机中的转子由磁极构成,当磁场切换时,转子会受到磁力的作用而旋转。
7. 步长和步进角:每发出一个脉冲,电机的转子就会围绕一个步进角旋转。
步进角的大小取决于电机的结构和驱动信号的频率。
8. 步进模式:根据控制器发送的信号频率和顺序,电机可以以全步进或半步进模式运行。
全步进模式下,转子每次转动步进角,而半步进模式下,转子每次转动步进角的一半。
通过以上原理,两相四线步进电机可以精确地控制转子的位置和速度,广泛应用于各种自动化设备和精密仪器中。
二相四线步进电机(297+298)

基于L297和L298的步进电机驱动器的设计作者:任明岩范丹步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
分散器件组成的环形脉冲分配器体积比较大,同时由于分散器件的延时,其可靠性大大降低;软件环形分配器要占用主机的运行时间,降低了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,同时开发周期长、需求费用较高。
步进电机控制步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(VR)、永磁式步进电机(PM)和混合式步进电机(HB)。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
其基本原理作用如下:(1)控制换相顺序通电换相这一过程称为脉冲分配。
例如:混合式步进电机的工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断,这就是所谓脉冲环形分配器。
(2)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
L297和L298组成的步进电机驱动电路SGS公司的L297单片步进电机控制集成电路适用于双极性两相步进电机或四相单极性步进电机的控制,与两片H桥式驱动芯片L298组合,组成完整的步进电机固定斩波频率的PWM恒流斩波驱动器。
L297产生四相驱动信号,用以控制双极性两相步进电机或四相单极性步进电机,可以采用半步、两相励磁、单相励磁三种工作方式控制步进电机,并且控制电机的片内PWM斩波电路允许三种工作方式的切换。
最新2相四线汇总

2相四线步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
两相混合式步进电机技术参数56系列

二相混合式步进电机56系列【价格】0元【说明】型号: 56混合式步进电机型号步距角机身长静力矩引线数电流电阻电感重量。
mm N.m No. A Ω mH kg56BYGH620 1.8 41 0.45 6 2.0 1.4 1.5 0.4556BYGHM611A 0.9 41 0.25 6 1.1 3.6 4.6 0.4556BYGH630A φ856BYGH630A φ6.35 1.8 56 0.9 6 3.0 0.8 1.4/1.8 0.756BYGH630B φ856BYGH630B φ6.3556BYGH630B-2 轴长25MM 1.8 78 1.35 6 3.0 1.0 1.2/1.6/2.1 1.056BYGH842 1.8 112 2.2 8 4.2 1.0 2.3 1.55规格: 56mm(步距角0.9°~1.8°)静力距0.45-2.2N.m机身长 41-112mm引线数 6,8电流 1.1-4.2A可配驱动器Q2BYG403B/BM/CM/MQ2BYG804AQ2BYG808MQ2BYG806/CM/DM用途:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
两相四线步进电机工作原理

两相四线步进电机工作原理步进电机是一种控制精度较高且运动平稳的电机,其工作原理是通过不同相位的电流脉冲来驱动电机转动。
两相四线步进电机是指电机有两个相位(也称为A相和B相),每个相位有两根线,分别为正向线和反向线。
工作时,分别给A相和B相通以电流,通过控制电流的方向和大小,来控制电机的转动角度和方向。
具体工作原理如下:1. 组成:两相四线步进电机由定子和转子组成。
定子绕有电磁线圈,每个相位有两根线,一根为正向线,一根为反向线;转子为磁性材料制成,上面带有永久磁铁或者铁芯。
2. 磁场复合:当A相线圈通电时,产生一个磁场,使转子磁铁对应极性与之吸引,转子会转动一定角度,直到磁场与之平衡;当电流停止或者改变方向时,转子会停止运动,然后受到另一个磁场的吸引,继续转动。
3. 步进角度:由于磁场吸引的原理,在没有机械阻力的情况下,步进电机一次只转动一个步距角,即一个电机周期内转动的角度。
步进角度由线圈的绕组和磁圈的极对数决定。
4. 驱动方式:两相四线步进电机通常通过驱动电路控制电流方向和大小。
常用的驱动方法有全步进和半步进两种。
- 全步进驱动方式:通过依次为A相和B相线圈通电,实现电流方向和大小的控制。
A相线圈通电,转子转动到目标角度后,停止通电;然后B相线圈通电,转子继续转动,以此循环进行。
- 半步进驱动方式:利用半步进驱动方式,可以实现更小的步进角度。
即每次A 相和B相线圈通电,转动角度减半,从而实现更精确的控制。
5. 应用:两相四线步进电机广泛应用于机械设备、自动化设备、仪器仪表等领域。
由于步进电机具有定位精度高、可控性强、结构简单等特点,适用于需要精确控制位置和转速的场合。
总结起来,两相四线步进电机通过控制电流的方向和大小实现转动,其工作原理是通过电磁线圈产生的磁场吸引转子,使之转动到指定角度,然后通过改变电流方向实现转子的停止和继续转动。
步进电机具有精确控制、工作平稳等优点,被广泛应用于各种需要精确控制位置和转速的设备中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
操作要求及评分标准
额定分数
评定分数
1
FX2N系列PLC一台及其配套设备、软件
1
画出I/O图和梯形图
25分
2
触摸屏一台及其配套设备、软件
2
两相四拍方式
每拍5分,共20分
额定考试时间
120分钟
3
每步间隔是2秒
10分
4
触摸屏实现正转
5分
开始时间
5
触摸屏实现反转
5分
6
触摸屏实现停止
5分
结束时间
7
能显示正转步数
两相四拍步进电机
模块6、用DECO指令编程实现两相步进电机的控制,要求如下:
(1)按照两相四拍方式运行;每步间隔时间是2秒;
(2)触摸屏上能实现步进电机的正转、反转和停止。能显示正转、反转的步数,无论哪个方向,当步数是1000时都要停机;
(3)在试卷上画出PLC的I/O分配图、PLC的梯形图和触摸屏的画面。
5分
8
能显示反转步数
5分
考评员签名
9
当步数到时能停机
5分
10
操作熟练
15分
I/O分