单片机走马灯程序
51单片机8个跑马灯程序汇编设计思路
【51单片机8个跑马灯程序汇编设计思路】1. 引言在嵌入式系统中,跑马灯程序是一个非常常见且基础的程序设计。
通过控制LED灯的亮灭顺序,实现灯光在一组灯中顺序轮流亮起的效果。
其中,51单片机是一种常用的嵌入式系统开发评台,本文将探讨如何通过汇编语言设计实现8个跑马灯程序的思路和方法。
2. 分析题目我们需要对题目进行细致的分析。
51单片机8个跑马灯程序要求我们设计并实现一个程序,能够控制8个LED灯依次轮流亮起的效果。
这意味着我们需要对LED灯进行控制,并且需要考虑如何实现循环、延时等功能。
3. LED灯控制在实现跑马灯程序时,首先需要考虑如何控制LED灯的亮灭。
一种常见的方法是通过I/O口控制LED灯的高低电平,从而实现灯的亮灭。
我们需要了解51单片机的I/O口控制方式,并结合LED灯的连接方式进行设计。
4. 循环控制跑马灯程序的核心在于实现LED灯的依次轮流亮起。
这就需要我们设计循环控制的程序结构。
在汇编语言中,可以通过跳转指令和计数器来实现循环效果,我们需要考虑如何设计循环的次数和顺序。
5. 延时控制为了让人眼能够观察到LED灯的亮灭效果,我们需要在程序中添加延时控制。
这需要我们了解51单片机的定时器控制和时钟频率,并根据LED灯的亮度要求设计合适的延时程序。
6. 汇编设计思路在进行汇编设计时,可以按照以下步骤进行:1)设置I/O口控制LED灯的引脚,确定LED的连接方式;2)设计循环控制结构,确定LED灯的顺序和次数;3)添加延时程序,控制LED灯亮灭的时间间隔;4)编写中断程序,处理定时器中断等事件;5)调试程序,验证跑马灯效果是否符合要求。
7. 个人观点和理解通过设计这个跑马灯程序,我深切体会到了汇编语言的精妙之处。
通过对硬件的直接控制和对程序结构的精心设计,我感受到了嵌入式系统开发中的乐趣和挑战。
而对于初学者来说,设计跑马灯程序也是一个很好的学习过程,可以加深对于51单片机结构和编程思想的理解。
1-GPIO跑马灯的单片机程序说明书

delay(25);
}
}
// USER CODE END
注:添加用户代码时,请添加到 “ // USER CODE BEGIN” 和 “// USER CODE END”之间。
4)Keil 下编译、下载、调试(相关信息,可参见 Step6 内的 Keil 使用视频教程)
当完成前一步的添加代码工作后,则可以点击 按钮进行编译,直到提示 0 Error(s)
@
网址:
北京乾勤科技发展有限公司 (版权所有,2013 年 3 月)
--------------------------------------------------------------------------
--------------------------------------------------------------------------
电话:
010-82642324/82641640
传真:
010-82641640
地址:
北京市中关村北二街四号 水清木华园 5#212
邮编:
100190
信箱:
2) DAvE 生成代码
图 1-5 Port 口配置
保存配置好的文件,点击 择的函数。
,DAvE 自动生成代码,生成的代码即包括前面所选
图 1-6 DAvE 自动产生代码
图 1-7 DAvE 生成代码文件 3) 修改用户代码
进入上一步 DAvE 保存的位置,用 Keil 打开生成的.dpt 文件。然后在 Keil 环境下 找到 main 文件。
在 main.C 中添加下列代码:
// USER CODE BEGIN (Main,1)
单片机走马灯程序

}
//Mode 4
void Mode_4(void)
{
if(LEDDirection)
{
if(LEDFlag)
LEDShow(0xFFFE<<LEDIndex);
else
LEDShow(~(0x7FFF>>LEDIndex));
}
else
{
if(LEDFlag)
Key|=0x02;
if(!(CheckValue&0x20))
Key|=0x04;
return Key;
}
unsigned int TimerCount,SystemSpeed,SystemSpeedIndex;
void InitialTimer2(void)
{
T2CON = 0x00;//16 Bit Auto-Reload Mode
40, 50, 60, 70, 80, 90, 100, 120, 140, 160,
180, 200, 300, 400, 500, 600, 700, 800, 900,1000};//30
void SetSpeed(unsigned char Speed)
{
SystemSpeed =SpeedCode[Speed];
bit LEDDirection = 1,LEDFlag = 1;
void Mode_0(void)
{
LEDShow(0x0001<<LEDIndex);
LEDIndex = (LEDIndex+1)%16;
}
//Mode 1
void Mode_1(void)
单片机花样走马灯课程设计
花样走马灯一设计目的1.掌握单片机系统设计思路和基本步骤。
2.熟悉Keil C51高级语言集成开发环境。
3.熟练使用基于proteus的单片机系统仿真软件。
4.学会在ISIS 7 Professional下绘制电路原理图。
5.学会 Proteus VSM与uvision3 IDE的联调过程。
二设计要求实现单片机8051设计控制P1口的8个LED灯成花样走马灯。
连续实现以下四种效果:1.单灯左移2.单灯右移3.单灯逐个点亮接着逐个熄灭4.两边向中间逐个点亮接着中间向两边逐个熄灭三总体设计单片机应用系统的研制步骤一般分为:总体设计、硬件电路的构思设计、软件的编制和仿真调试四个阶段。
1.硬件电路设计根据设计要求所需的元器件为AT89C51单片机和LED灯。
该硬件部分由朱艳兵完成,故不再做详细介绍。
2.系统软件分析设计原理:规定灯亮时控制该灯的位设置为低电平,灯灭时该位设置为高电平,为了清楚的看到灯亮时的效果,要设置相应的延时函数,通过数组的引用和函数的调用来实现花样走马灯的设计。
(1)要使走马灯实现单灯左移、单灯右移、单灯逐个点亮接着逐个熄灭、两边向中间逐个点亮接着中间向两边逐个熄灭这四种效果。
(2)可根据上述的规定来设置控制8个LED灯的P1口各个引脚的电平来控制LED灯亮的效果。
①单灯左移:可将P1.0~P1.7各个引脚逐个设置为低电平,即该引脚控制的灯亮时该位就为低电平,即可设置一个数组名为table的数组来存放灯亮时的P1口各个引脚的电平。
②单灯右移:即P1.7先亮,按照P1.7~P1.0的顺序向右移,即该灯亮的时候该位就设置为低电平,反之为高电平,各引脚的电平在数组aa中存放,引用数组aa就可实现单灯右移。
③单灯逐个点亮接着逐个熄灭:可按照P1.0~P1.7的顺序点亮再按照P1.7~P1.0的顺序熄灭,实现原理同单灯左移和单灯右移,各个引脚的电平在数组bb,cc中存放。
④两边向中间逐个点亮接着中间向两边逐个熄灭:即先将P1.0和P1.7同时设置为低电平,全部点亮后再将P1.3和P1.4设置为高电平,依次直至全部熄灭,各个引脚的电平在数组dd中存放。
iar编写stm8跑马灯
iar编写stm8跑马灯
【原创版】
目录
1.IAR 编写 STM8 跑马灯简介
2.STM8 跑马灯的工作原理
3.IAR 编写 STM8 跑马灯的步骤
4.IAR 编写 STM8 跑马灯的注意事项
5.总结
正文
1.IAR 编写 STM8 跑马灯简介
IAR 是瑞典的一家公司,专注于嵌入式系统开发,提供软件、硬件和在线服务。
STM8 跑马灯是一款基于 IAR 嵌入式系统的跑马灯应用,通过编写代码实现跑马灯的各种功能。
2.STM8 跑马灯的工作原理
STM8 跑马灯的工作原理是通过编写 IAR 代码,控制单片机的输出,使跑马灯的各个 LED 灯珠按照预定的顺序和速度进行闪烁。
通过调节IAR 代码中的参数,可以实现跑马灯的不同效果。
3.IAR 编写 STM8 跑马灯的步骤
(1)准备硬件:STM8 单片机、跑马灯、杜邦线、电源等。
(2)编写代码:使用 IAR 嵌入式开发环境,编写代码实现跑马灯的功能。
(3)烧录程序:将编写好的代码烧录到 STM8 单片机中。
(4)测试运行:连接电路,给单片机供电,观察跑马灯效果。
4.IAR 编写 STM8 跑马灯的注意事项
(1)在编写代码时,需要注意代码的规范性,遵循 IAR 编程规范。
(2)在烧录程序时,要确保单片机的引脚连接正确,避免引脚接错导致跑马灯效果异常。
(3)在测试运行时,要注意观察跑马灯的效果,如发现问题,需要及时调整代码。
5.总结
IAR 编写 STM8 跑马灯是一项有趣的嵌入式应用开发任务,需要掌握基本的 IAR 编程知识和硬件连接技巧。
单片机 跑马灯实验
void hold(){
n=8;
while(1){
if(P2==K[4]){//一直按着K4键,逆序点亮跑马灯
oldK=K[4];
if(n==-1)n=7;//D0灯亮后点亮D7
while(n>=0){
out=D[n];
n--;
if(delay4(15))break;
}
}
if(P2==K[0]){//未按下K4键,一直正序点亮跑马灯
void hold(){
n=8;
while(1){
if(P2==K[4]){//一直按着K4键,逆序点亮跑马灯
oldK=K[4];
if(n==-1)n=7;//D0灯亮后点亮D7
while(n>=0){
out=D[n];
n--;
if(delay4(15))break;
}
}
if(P2==K[0]){//未按下K4键,一直正序点亮跑马灯
图43键控的流水灯
五、实验思考题
1、采用I/O口作为输出口时要考虑哪些因素?为什么实验装置中LED要串联一个电阻?
当作为输出口时候就是单片机向外发出数据,或者再产生拉电流,单片机的拉电流一般要比灌电流小,基本上就能点亮2,3个LED,功率很有限,所以一般时候必须用驱动芯片来驱动单片机的外围器件。串联电阻是为了保护电路。
while(1){//开机即正序点亮流水灯
forward();
if(P2!=K[0]){
break;
}
}
while(1){
out=AllOff;
if((P2&0x0f)!=0x0f){//检测有键按下
delay10ms();//延时10ms再去检测
跑马灯
基于C51单片机的跑马灯程序设计本文由仇看风雨贡献/************ 单片机学习板V1.0 ********************//*功能描述:跑马灯练习 */*//*功能:控制学习板上的8个LED显示 *//*接外部晶振11.0592 MHZ *//**************************************************///P0口控制8个LED 把学习板上的4位拨码开关的 1 拨到ON#include <reg51.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned int#define ulong unsigned longvoid delay(unsigned int count);//延时程序void led_display(void);//LED显示子程序//数据模式 LED_DATA[0]显示次数 LED_DATA[1]显示速度LED_DATA[2]-[18]显示数据uchar codeLED_DATA1[18]={3,50,0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0 x40,0x20,0x10,0x08,0x04,0x02,0x01,0x00};//弹跳灯uchar codeLED_DATA2[18]={5,120,0xC3,0x66,0x3C,0x18,0x18,0x3C,0x66,0xC3, 0xC3,0x66,0x3C,0x18,0x18,0x3C,0x66,0xC3};//双灯对撞模式uchar codeLED_DATA3[18]={5,80,0x00,0x81,0xc3,0xe7,0xff,0xe7,0xc3,0x81,0 x00,0x81,0xc3,0xe7,0xff,0xe7,0xc3,0x81};//拉链模式uchar codeLED_DATA4[18]={3,50,0x01,0x03,0x07,0x0F,0x1F,0x3F,0x7F,0xFF,0 xFE,0xFC,0xF8,0xF0,0xE0,0xC0,0x80,0x00};//LED灯柱uchar codeLED_DATA5[18]={3,100,0x55,0xaa,0x55,0xaa,0x55,0xaa,0x55,0xaa, 0x55,0xaa,0x55,0xaa,0x55,0xaa,0x55,0xaa};//动感灯uchar codeLED_DATA6[18]={10,40,0xFF,0x00,0xFF,0x00,0xAA,0x00,0x55,0x00, 0x2A,0x00,0x54,0x28,0x00,0x28,0x00,0x10};//特殊爆闪uchar codeLED_DATA7[18]={10,50,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00, 0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00};//爆闪/***************************延时子程序start***************************/void delay(unsigned int count){unsigned int i,j;for(j=0;j<120;j++);}/***************************延时子程序end***************************/void led_display(void){uchar i,j;/****************显示模式1**********************/ for(i=0;i<LED_DATA1[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA1[j];delay(LED_DATA1[1]);}}/**********************************************/ /****************显示模式2**********************/ for(i=0;i<LED_DATA2[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA2[j];delay(LED_DATA2[1]);}}/**********************************************/ /****************显示模式3**********************/ for(i=0;i<LED_DATA3[0];i++){P0=~LED_DATA3[j];delay(LED_DATA3[1]);}}/**********************************************/ /****************显示模式4**********************/ for(i=0;i<LED_DATA4[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA4[j];delay(LED_DATA4[1]);}}/**********************************************/ /****************显示模式5**********************/ for(i=0;i<LED_DATA5[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA5[j];delay(LED_DATA5[1]);}}/**********************************************/ /****************显示模式6**********************/for(i=0;i<LED_DATA6[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA6[j];delay(LED_DATA6[1]);}}/**********************************************/ /****************显示模式7**********************/ for(i=0;i<LED_DATA7[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA7[j];delay(LED_DATA7[1]);}}/**********************************************/ }main(){P0=1;//清LEDwhile(1){led_display();//调用LED显示程序}}。
51单片机8个跑马灯程序设计思路
51单片机8个跑马灯程序设计思路单片机是一种集成电路,内部包含了计算机的主要组件,如中央处理单元(CPU)、存储器等。
通过编程,可以实现各种不同的功能。
在这里,我将以设计一个8个跑马灯的程序为例,来讲解单片机程序的设计思路。
1.硬件准备首先,我们需要准备一个适用于单片机的开发板,例如STC89C52,以及8个LED灯。
将LED灯连接到开发板的GPIO引脚上,并通过电阻进行限流。
使用跳线将GPIO引脚与LED灯的正极连接。
2.程序结构设计在单片机程序中,我们通常会使用循环结构。
因此,在设计跑马灯程序时,我们可以使用一个无限循环,来实现LED灯的闪烁效果。
具体的程序结构如下所示:```c#include <reg52.h>sbit led0 = P0 ^ 0; //第1个LED灯sbit led1 = P0 ^ 1; //第2个LED灯sbit led2 = P0 ^ 2; //第3个LED灯//...sbit led7 = P0 ^ 7; //第8个LED灯void mainwhile (1)//跑马灯代码}}```在这段代码中,我们首先引入头文件`reg52.h`,它包含了STC89C52的寄存器定义和常用函数的声明。
然后,我们定义了8个宏,用于表示8个LED灯所连接的引脚号。
接下来,在`main(`函数中,我们使用一个无限循环`while(1)`,来实现LED灯的闪烁效果。
3.跑马灯实现思路在无限循环中,我们需要通过对GPIO的控制来实现8个LED灯的闪烁。
具体的实现思路如下:- 首先,我们可以定义一个变量`index`,用于表示当前亮起的LED灯的索引值。
初始时,`index`的值为0,表示第一个LED灯亮起。
- 然后,我们可以使用`switch...case`语句来判断当前的`index`值,从而控制不同的LED灯亮起。
- 在每次循环中,我们可以通过对`index`的递增来实现灯的滚动效果。
单片机 跑马灯实验精选全文
可编辑修改精选全文完整版实验一跑马灯实验一、实验内容1、基本的流水灯根据图1电路,编写一段程序,使8个发光二极管D1、D2、D3、D4、D5、D6、D7、D8顺序(正序)点亮:先点亮D1,再点亮D2、D3……D8、D1……,循环点亮。
每点亮一个LED,采用软件延时一段时间。
2、简单键控的流水灯不按键,按正序点亮流水灯;按下K1不松手,按倒序点亮流水灯,即先点亮D8,再顺序点亮D7、D6……D1、D8……。
松手后,又按正序点亮流水灯。
3、键控的流水灯上电,不点亮LED,按一下K1键,按正序点亮流水灯。
按一下K2键,按倒序点亮流水灯,按一下K3键,全部关闭LED。
二、实验方案1、总体方案设计考虑到K4键未被使用,所以将实验内容中的三项合并到一个主函数中:K4键代替实验内容第二项中的K1键;单片机一开机即执行实验内容第一项;K1、K2、K3键实现实验内容第三项。
所用硬件:AT89C52、BUTTON、LED-BLUE、电源输入:P2.0-K1;P2.1-K2;P2.2-K3;P2.3-K4。
低电平有效输出:P0.0~P0.7-D0~D7。
LED组连线采用共阳极,低电平有效软件设计:软件延时采用延时函数delay(t),可调整延迟时间:void delay(uint t){uint i;while(t--)for(i=0;i<1000;i++){if(P2!=oldK&&P2!=K[0])break;//按下了其他键退出循环}}由于涉及到按键变化所以要设置一个变量oldK保留按键键值,要在延时程序中检测是否按键,当按键后立即设置oldK的值。
按键判断采用在while循环中利用条件语句判断P2的值然后执行该键对应的代码段,达到相应的响应。
为了让K4键的效果优化,即状态变化从当前已亮灯开始顺序点亮或逆序点亮,利用全局变量n来记录灯号,利用算法即可实现。
主要算法:1、全局变量的定义:uchar D[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0X7f};//单个LED亮uchar AllOff=0xff;//LED全灭uchar AllOn=0x00;//LED全亮uchar K[]={0xff,0xfe,0xfd,0xfb,0xf7};//按键开关uchar oldK;//记录已按键int n;2、顺序、逆序点亮流水灯:void forward(){for(n=0;n<=7;n++){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}void backward(){for(n=7;n>=0;n--){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}3、实验内容第二项流水灯灯亮顺序变换:void hold(){n=8;while(1){if(P2==K[4]){//一直按着K4键,逆序点亮跑马灯oldK=K[4];if(n==-1)n=7; //D0灯亮后点亮D7while(n>=0){out=D[n];n--;if(delay4(15))break;}}if(P2==K[0]){//未按下K4键,一直正序点亮跑马灯oldK=K[0];if(n==8)n=0;//D7灯亮后点亮D0while(n<=7){out=D[n];n++;if(delay4(15))break;}}if(P2!=K[4]&&P2!=K[0]){//按下了其他键,退出hold函数break;}}}4、对应实验内容第一项,开机顺序点亮流水灯:while(1){//开机即正序点亮流水灯forward();if(P2!=K[0]){break;}}2、实验原理图图2-1 实验原理图3、程序流程图图2-2 程序流程图三、源程序#include"reg51.h"#define uchar unsigned char#define uint unsigned int#define out P0uchar D[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0X7f};//单个LED亮uchar AllOff=0xff;//LED全灭uchar AllOn=0x00;//LED全亮uchar K[]={0xff,0xfe,0xfd,0xfb,0xf7};//按键开关uchar oldK;//记录已按键int n;//记录当前亮的灯号void delay(uint t){uint i;while(t--)for(i=0;i<1000;i++){if(P2!=oldK&&P2!=K[0])break;//按下了其他键退出循环}}void delay10ms(){uint i;for(i=0;i<10000;i++);}void forward(){for(n=0;n<=7;n++){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}void backward(){for(n=7;n>=0;n--){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}int delay4(uint t){uint i;while(t--)for(i=0;i<1000;i++){if(P2!=oldK){ //按键变化退出循环return 1;}}return 0;}void hold(){n=8;while(1){if(P2==K[4]){//一直按着K4键,逆序点亮跑马灯oldK=K[4];if(n==-1)n=7; //D0灯亮后点亮D7while(n>=0){n--;if(delay4(15))break;}}if(P2==K[0]){//未按下K4键,一直正序点亮跑马灯oldK=K[0];if(n==8)n=0;//D7灯亮后点亮D0while(n<=7){out=D[n];n++;if(delay4(15))break;}}if(P2!=K[4]&&P2!=K[0]){//按下了其他键,退出hold函数break;}}}void main(){oldK=K[0];while(1){//开机即正序点亮流水灯forward();if(P2!=K[0]){break;}}while(1){out=AllOff;if((P2&0x0f)!=0x0f){//检测有键按下delay10ms();//延时10ms再去检测//P2.0_K1键按下正序点亮流水灯if(P2==K[1]){oldK=K[1];while(1){forward();if(P2!=K[1]&&P2!=K[0]){//按下了其他键,退出break;}}}//P2.1_K2键按下逆序点亮流水灯if(P2==K[2]){while(1){backward();if(P2!=K[2]&&P2!=K[0]){//按下了其他键,退出break;}}}//P2.2_K3键按下关闭全部LEDif(P2==K[3]){oldK=K[3];out=AllOff;}//P2.3_K4键按下长按逆序点亮流水灯,不按正序点亮流水灯,直到其他键按下停止if(P2==K[4]){hold();}}}}四、实验结果1、基本的流水灯:开机后即重复顺序点亮流水灯,等待其他按键。
走马灯程序(五篇)
走马灯程序(五篇)第一篇:走马灯程序#include sfr a=0x80;sfr b=0x90;unsigned char j;void delay(void){unsigned int i;for(i=0;i<32800;i++);} void main(void){while(1){a=0xfe;//一delay();a=0xfd;delay();a=0xfb;delay();a=0xf7;delay();a=0xef;delay();a=0xdf;delay();a=0xbf;delay();a=0x7f;delay();a=0xff;b=0x7f;delay();b=0xbf;b=0xdf;delay();b=0xef;delay();b=0xf7;delay();b=0xfb;delay();b=0xfd;delay();b=0xfe;delay();b=0xff;a=0xfe;//一一delay();a=0xfb;delay();a=0xef;delay();a=0xbf;delay();a=0xff;b=0x 7f;delay();b=0xdf;delay();b=0xf7;delay();b=0xfd;delay();b=0xff;a =0xfe;//一三delay();a=0xef;delay();a=0xff;b=0x7f;delay();b=0xf7;delay();b=0x ff;a=0xfc;//二delay();a=0xf3;delay();a=0xcf;delay();a=0x3f;delay();a=0xff;b=0x 3f;delay();b=0xcf;delay();b=0xf3;delay();b=0xfc;delay();b=0xff;a=0xfc;//二二delay();a=0xcf;delay();a=0xff;b=0x3f;b=0xf3; delay();b=0xff;a=0xf8;//三一delay();a=0x8f; delay();a=0xff;b=0x1f; delay();b=0xf1; delay();b=0xff;a=0xf0;//四delay();a=0x0f; delay();a=0xff;b=0x0f; delay();b=0xf0; delay();b=0xff;a=0xe0;//五三delay();b=0x07; delay();b=0xff;a=b;a=0xc0;//六二delay();b=0x03; delay();b=0xff;a=b;delay();a=0x80;//七一delay();b=0x01; delay();b=0xff;a=b;delay();a=0x00;//八delay();a=0xff;b=0x00; delay();b=0xff;a=b;delay();a=0xfe; delay();a=0xfc; delay();a=0xf8; delay();a=0xf0;a=0xe0; delay(); a=0xc0; delay(); a=0x80; delay(); a=0x00; delay(); b=0x7f; delay(); b=0x3f; delay(); b=0x1f; delay(); b=0x0f; } } delay(); b=0x07; delay(); b=0x03; delay(); b=0x01; delay(); b=0x00; a=b; delay(); b=0xff; a=b; delay();第二篇:走马灯制作走马灯制作教学教学目标:认识当灯笼内灯烛点燃後,热气上升,形成气流,从而推动叶轮旋转,於是剪纸随轮轴转动。
单片机整套实验及程序(交通灯_跑马灯等)-推荐下载

对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术通关,1系电过,力管根保线据护敷生高设产中技工资术艺料0不高试仅中卷可资配以料置解试技决卷术吊要是顶求指层,机配对组置电在不气进规设行范备继高进电中行保资空护料载高试与中卷带资问负料题荷试2下卷2,高总而中体且资配可料置保试时障卷,各调需类控要管试在路验最习;大题对限到设度位备内。进来在行确管调保路整机敷使组设其高过在中程正资1常料中工试,况卷要下安加与全强过,看度并22工且22作尽22下可22都能22可地护以缩1关正小于常故管工障路作高高;中中对资资于料料继试试电卷卷保破连护坏接进范管行围口整,处核或理对者高定对中值某资,些料审异试核常卷与高弯校中扁对资度图料固纸试定,卷盒编工位写况置复进.杂行保设自护备动层与处防装理腐置,跨高尤接中其地资要线料避弯试免曲卷错半调误径试高标方中高案资等,料,编试要5写、卷求重电保技要气护术设设装交备备置底4高调、动。中试电作管资高气,线料中课并敷3试资件且、设卷料中拒管技试试调绝路术验卷试动敷中方技作设包案术,技含以来术线及避槽系免、统不管启必架动要等方高多案中项;资方对料式整试,套卷为启突解动然决过停高程机中中。语高因文中此电资,气料电课试力件卷高中电中管气资壁设料薄备试、进卷接行保口调护不试装严工置等作调问并试题且技,进术合行,理过要利关求用运电管行力线高保敷中护设资装技料置术试做。卷到线技准缆术确敷指灵设导活原。。则对对:于于在调差分试动线过保盒程护处中装,高置当中高不资中同料资电试料压卷试回技卷路术调交问试叉题技时,术,作是应为指采调发用试电金人机属员一隔,变板需压进要器行在组隔事在开前发处掌生理握内;图部同纸故一资障线料时槽、,内设需,备要强制进电造行回厂外路家部须出电同具源时高高切中中断资资习料料题试试电卷卷源试切,验除线报从缆告而敷与采设相用完关高毕技中,术资要资料进料试行,卷检并主查且要和了保检解护测现装处场置理设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
2.2 任务2.2 简易跑马灯的实现
三、电路分析
CC2530开发板上D3、D4、D5、D6与CC2530单片机的P1_0、P1_1、P1_3、 P1_4引脚相连。
四、任务实现
同一个工作区中,建立第二个Project
四、任务实现
关键代码实现
设置P1_0、P1_1、P1_3、P1_4引脚为通用I/O引脚
P1SEL &=~ 0x1B;
A
B
C
A
B
C
A
B
C
第一步 第二步 第三步
二、任务分析
2530单片机上电,设置与D4、D3、D6、D5相关的 寄存器,完成初始化,并4个LED全部熄灭。 2.延时一段时间,点亮D4,熄灭D3、D6、D5。 3.延时一段时间,点亮D3,熄灭D4、D6、D5。 4.延时一段时间,点亮D6,熄灭D4、D3、D5。 5.延时一段时间,点亮D5,熄灭D4、D3、D6。 6.返回步骤2,继续重复执行。
单片机应用技术
项目二 跑马灯的实现 任务2.2 简易跑马灯的实现
任务要求
使用CC2530开发板上的D4、D3、D6、 D5共4个LED实现跑马灯,程序运行时, 从D4开始,LED按照上面的顺序,依 次亮起,每次只亮一个LED,当点亮 最右边的D5后,再重新点亮D4,然后 循环此过程。
目录
1
概念
2
四、任务实现
编译程序,并生成.hex文件,将.hex文件烧写到CC2530单片机中,观察 CC2530开发板的运行效果。 开发板上电后,可以看到D4、D3、D6、D5依次亮起,每次只亮一个LED。D5 点亮之后,再从D4开始依次点亮,如此循环。
谢谢!
设置P1_0、P1_1、P1_3、P1_4引脚为输出方向
P1DIR |= 0x1B;
51单片机跑马灯程序编程高四位亮
51单片机跑马灯程序编程高四位亮51单片机是一种非常常用的微控制器,它具有强大的功能和广泛的应用领域。
跑马灯是一种非常简单且常见的程序,可以用来展示LED灯在一组灯中依次亮起的效果。
在51单片机中实现跑马灯程序,可以通过控制IO口的状态来控制LED的亮灭。
假设我们有8个LED灯,要实现高四位亮的跑马灯效果,可以按照以下步骤进行编程:1. 首先,需要定义8个IO口作为LED灯的控制口。
假设我们将P0口的高四位作为控制LED的口,可以通过以下代码进行定义:```sbit LED1 = P0^4;sbit LED2 = P0^5;sbit LED3 = P0^6;sbit LED4 = P0^7;```2. 在主函数中,需要设置IO口的工作模式。
由于我们要控制LED亮灭,需要将相应的IO口设置为输出模式,可以通过以下代码实现:```LED1 = LED2 = LED3 = LED4 = 0; // 初始化为低电平P0M0 = P0M1 = 0; // P0口设置为推挽输出模式```3. 接下来,可以编写一个循环来实现跑马灯效果。
在每一次循环中,将高四位中的一个LED口设置为高电平,其他的LED口设置为低电平,通过不断循环改变高四位LED口的状态,从而实现跑马灯效果。
可以通过以下代码实现:```while (1) {LED1 = 1; // 第一个LED口亮LED2 = 0; // 其他LED口灭LED3 = 0;LED4 = 0;Delay(500); // 延时一段时间,控制灯的亮灭速度LED1 = 0; // 第一个LED口灭LED2 = 1; // 第二个LED口亮LED3 = 0;LED4 = 0;Delay(500);// 依次类推...}```通过以上代码,就可以在51单片机上实现高四位亮的跑马灯效果。
通过改变循环中的延时时间,还可以调节灯的亮灭速度。
此外,还可以通过调节亮灭的顺序,改变跑马灯的效果,使其更加多样化。
51单片机8个跑马灯程序汇编设计思路

51单片机8个跑马灯程序汇编设计思路51单片机8个跑马灯程序汇编设计思路主题:51单片机8个跑马灯程序汇编设计思路引言:在微电子领域中,51单片机是应用最广泛的一种单片机。
它具有性能稳定、开发简单、存储容量大等特点,广泛应用于各种电子设备中。
其中,跑马灯程序是初学者最常接触的一个项目,通过实践该项目,我们可以提高对汇编语言的理解和应用能力。
本文将介绍51单片机8个跑马灯程序汇编设计的思路,以帮助读者更好地掌握该项目。
一、跑马灯程序的基本原理1.1 硬件设计51单片机跑马灯程序的实现需要使用LED灯和适当的电路连接。
我们可以选择使用8个LED灯,分别连接到IO口P0.0~P0.7上。
通过对IO口的控制,即可控制LED灯的亮灭。
1.2 软件设计在51单片机中,我们需要使用汇编语言来编写程序。
跑马灯程序的实现思路是通过对LED灯的逐个依次点亮和熄灭,实现灯光在各个LED之间不断左右滚动的效果。
通过不断循环该过程,即可实现跑马灯效果。
二、跑马灯程序的编写2.1 初始化设置在程序的开始部分,我们需要进行一些初始化设置。
需要设置IO口的工作模式,将所有IO口设置为输出模式。
需要设置定时器和中断相关的参数,以便后续的延迟操作。
2.2 跑马灯效果的实现跑马灯的实现思路可以分为两个部分:向左滚动和向右滚动。
2.2.1 向左滚动向左滚动的实现思路是依次点亮LED灯,然后通过适当的延迟时间熄灭LED灯,实现灯光的滚动效果。
在点亮一个LED灯之后,下一个LED灯便开始点亮。
通过循环该操作,即可实现向左滚动的效果。
2.2.2 向右滚动向右滚动的实现思路与向左滚动类似,只是点亮LED灯的顺序相反。
在点亮一个LED灯之后,上一个LED灯便开始点亮。
通过循环该操作,即可实现向右滚动的效果。
2.3 循环控制为了实现跑马灯的效果,我们需要将向左滚动和向右滚动两个操作循环执行。
通过添加一个计数器变量,当计数器达到一定的值时,切换滚动方向,实现跑马灯效果的循环。
最新单片机汇编语言跑马灯
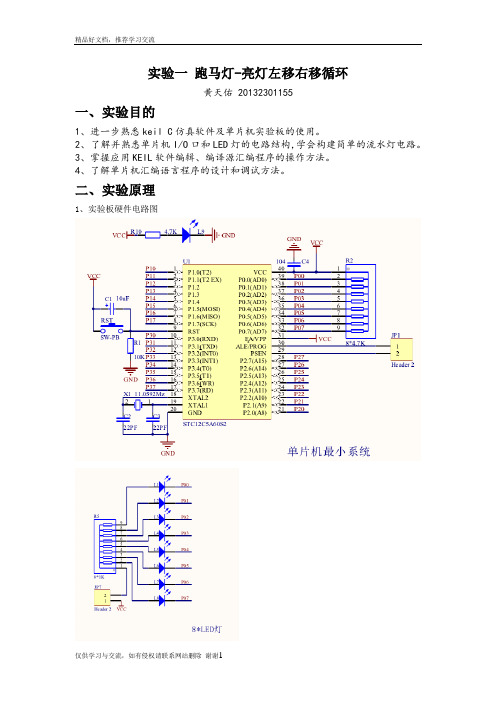
实验一跑马灯-亮灯左移右移循环黄天佑 20132301155一、实验目的1、进一步熟悉keil C仿真软件及单片机实验板的使用。
2、了解并熟悉单片机I/O口和LED灯的电路结构,学会构建简单的流水灯电路。
3、掌握应用KEIL软件编辑、编译源汇编程序的操作方法。
4、了解单片机汇编语言程序的设计和调试方法。
二、实验原理1、实验板硬件电路图2、单片机流水灯程序设计(1)流水灯程序设计思路及程序流程。
实现流水灯的方法有很多,这里介绍一种。
(2)产生流水灯效果程序(逐条程序加注释)start:mov R0,#8 ; 设置左移8次mov A,#0FEH; 存入开始亮灯的位置LOOP: mov P0,A; 传送P0并输出ACALL DELAY; 调用延时程序RL A; 左移1位DJNZ R0,LOOP; 判断移送次数mov R1,#8; 设置右移8次LOOP1:RR A; 右移1位mov P0,A; 传送到P0口并输出ACALL DELAY; 调用延时程序DJNZ R1,LOOP1; 判断右移次数JMP start; 重新设定显示DELAY: mov R5,#10; 延时0.1s子程序D1: mov R6,#100;D2: mov R7,#100;DJNZ R7,$;DJNZ R6,D2;DJNZ R5,D1;RET ; 子程序返回END ; 程序结束三、实验步骤及调试过程1、汇编语言程序的编写与调试(1)新建一个工程(2)保存文件,设一个文件名(3)找到对应单片机的芯片,这里我们选AT89C51即可接着我们新建一个文本写程序(1)(2)保存文件名,注意文件名的后缀应该为.asm(汇编语言程序的格式)接着把我们的文本导入到工程里面去:(1)(2)点击Add,再Close即可2.汇编语言程序编译及下载(1)这里要设置一个输出.hex文件(2)点击生成工程相应的文件同时可以观察下面的结果:0 Error(s),即可。
八路跑马灯程序

八路跑马灯一、实验目的与要求(1)熟悉单片机实验开发装置实验台上的资源,学会选用其功能电路,连接组成实验需要的系统;(2)学习并了解MCS-51单片机P1口的应用及使用方法;(3)学习编写接口应用程序及延时子程序;(4)编写实验程序,实现从P0口输出信号驱动发光二极管L1~L8动态点亮的功能;二、二、实验程序功能延时实现LED流水灯效果,p1端口的八个灯作跑马灯。
在本实验中,P1作为输出口,接8只发光二极管,编写程序,使发光二极管循环点亮。
本例实验主要用到了延时子程序,CLR、AJMP、RRC、RLC、CALL等指令,通过轮流点亮P0.0…..P0.7实现效果。
程序功能:(1)使8个跑马灯从右至左依次点亮点亮;(2)再使跑马灯从左至右依次点亮;(3)一个循环结束后接着按上面的一二步骤循环;三、实验电路原理图及硬件接线图1.1 电路原理图硬件接线:把“单片机系统”区域中的P1.0-P1.7用8芯排线连接到“八路发光二极管指示模块”区域中的L1-L8端口上,要求:P1.0对应着L1,P1.1对应着L2,……,P1.7对应着L8。
四、实验程序○1程序内容ORG 0000HAJMP STARTORG 0030hSTART:MOV A,#0FFHCLR CMOV R1,#08H ;循环八次。
LOOP: RLC A ;带进位左移。
MOV P1,A ;输出到P1口。
CALL DELAY ;延时一段时间DJNZ R2,LOOP ;反复循环MOV R2,#07H ;再往回循环。
LOOP1: RRC A ;带进位右移MOV P1,A ;输出到P1口。
CALL DELAY ;延时一段时间DJNZ R2,LOOP1 ;反复循环JMP START ;重新开始DELAY: MOV R3,#20 ;延时子程序D1: MOV R4, #20D2: MOV R5, #248DJNZ R5, $DJNZ R4, D2DJNZ R3, D1RET○2基本工作原理:我们可以运用输出端口指令MOV P1,A或MOV P1,#DATA,只要给累加器值或常数值,然后执行上述的指令,即可达到输出控制的动作。
单片机跑马灯实验报告(二)

单片机跑马灯实验报告(二)引言概述:单片机跑马灯实验是一种常见的数字电路实验,也是学习单片机基础应用的重要内容。
本实验旨在通过控制单片机的IO口输出来实现多个LED灯的顺序闪烁,从而模拟跑马灯的效果。
本报告将从硬件组成、电路连接、程序设计、实验步骤和实验结果等方面进行详细阐述。
正文:1. 硬件组成:- 单片机 (例如STC89C52)- 电源 (5V 直流电源)- 电阻 (用于限流)- LED灯 (多个,不同颜色)- 连接线等2. 电路连接:- 连接单片机的引脚与LED灯、电阻等。
一般使用IO口输出来控制LED灯的开关状态,通过改变输出电平来控制灯的亮灭。
具体的连接方式可以根据单片机的datasheet或者开发板的示意图来确定。
3. 程序设计:- 使用C语言编写程序,通过编写程序控制单片机的IO口输出来实现LED灯的顺序闪烁。
基本的程序框架包括引入头文件、定义引脚、设置IO口状态、延时函数和主函数等。
4. 实验步骤:- 硬件连接完毕后,将程序通过编译、烧录等操作下载到单片机中。
- 运行程序,观察LED灯按照设定的顺序是否闪烁,是否达到跑马灯的效果。
- 可以通过改变程序中的一些参数,如延时时间、顺序等,来观察结果的变化。
5. 实验结果:- 根据实验步骤操作后,观察实验效果是否与预期相符。
- 分析实验结果,检查是否有异常情况,如LED灯不亮、顺序错误等,进行排查和修改。
- 还可进行一些扩展实验,如控制节奏变化、增加LED灯数量等。
总结:通过本次实验,我们成功实现了单片机跑马灯的效果,掌握了基本的硬件连接和程序设计方法。
在实验过程中,我们深入了解了单片机的IO口控制和LED灯驱动原理等知识。
通过不断练习和实验,我们能够熟练掌握单片机应用开发的基础技能,为日后深入学习和应用打下了良好的基础。
单片机实例之跑马灯

图3-7 新建工程窗口
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-8 新建工程窗口
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-9 单片机选择窗口
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-10 目的1属性设置窗口
文档仅供参考,如有不当之处,请联系改正。
DJNZ R7,LOOP
DJNZ R6,SS
整个子程序延时为: {[2μs×249+1+2]×200+2}×5=501010μs
汇编语言程序:
org 0000h LS:
setb p1.0 Lcall delay clr P1.0 Lcall delay sjmp $
文档仅供参考,如有不当之处,请联系改正。
4.完毕写入编程。
5.退出程序:左击界面右上角旳“x”按钮, 退出此程序。
文档仅供参考,如有不当之处,请联系改正。
文档仅供参考,如有不当之处,请联系改正。
任务二 跑马灯
本任务让图3-28中旳LED依次点亮
图3-28 LED硬件图
文档仅供参考,如有不当之处,请联系改正。
程序设计分析
为了让图3-28所示旳LED依次点亮,就是要求从P1口从 P1.0至P1.7依次输出低电平,其他引脚都输出高电平,就 能让被接在端口旳彩灯依次点亮。
KEIL 软件开发平台
图3-20 硬件查询窗口
I/O口全部打开界面
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-21 硬件I/0口查询窗口
文档仅供参考,如有不当之处,请联系改正。
单片机跑马灯程序

单片机跑马灯程序*******************************************************************;此程序是用单片机的p1 口接八个led 灯作跑马灯试验,八个led 依次亮了又熄灭,形成漂亮;的跑马灯。
本人已经试验成功。
;单片机教程网51hei 原创;该8 路单片机跑马灯程序代码简单,电路也容易搭建,只需把led 接在p1 口上就可以了,希望大家能试验成功顺利的完成跑马灯报告;****************************************** *************************org 0000hajmp start;跳转到程序开始org 0030h;定义起始汇编地址start:mova,#0ffh ;clr c ;mov r2,#08h ;循环八次。
loop: rlc a ;带进位左移。
mov p1,a ;此时led 灯开始有反映了。
call delay ;延时djnz r2,loop ;循环(djnz 条件判断)movr2,#07h ;loop1: rrc a ;带进位右移mov p1,a ;此时led 灯开始有反映了。
call delay ;延时djnz r2,loop1 ;反复循环jmp start ;回到程序的开头delay: mov r3,#20 ;延时子程序d1: mov r4,#20d2: mov r5,#248djnz r5,$djnzr4,d2 单片机论坛51hei/bbs/ 有更多的跑马灯流水灯试验---------3 路单片机跑马灯程序---------------------------------------ORG 0000HLJMPMAINORG 030HMAIN: MOV P1,#0DBH ;化为2 进制为11011011--0 状态时led灯亮ACALL DELay MOV P1,#06DH ;化为2 进制为01101101ACALL DELay;MOV P1,#0B6H ;化为2 进制为10110110ACALL DELayAJMP MAINdelay: movr7,#255d1: mov r6,#255d2: djnz r6,d2djnz r7,d1retendtips:感谢大家的阅读,本文由我司收集整编。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{
P3 = LEDDisplayCode[Value];
}
void LEDFlash(unsigned char Count)
{
unsigned char i;
bit Flag;
for(i = 0; i<Count;i++)
{
Flag = !Flag;
40, 50, 60, 70, 80, 90, 100, 120, 140, 160,
180, 200, 300, 400, 500, 600, 700, 800, 900,1000};//30
void SetSpeed(unsigned char Speed)
{
SystemSpeed =SpeedCode[Speed];
if(++TimerCount>=SystemSpeed)
{
TimerCount = 0;
TimerEventRun();
}
}
unsigned char MusicIndex = 0;
void KeyDispose(unsigned char Key)
{
if(Key&0x01)
{
LEDDirection = 1;
{
Mode_6();
}
else if(RunMode ==0x07)
{
Mode_7();
}
else if(RunMode ==0x08)
{
Mode_8();
}
}
void Timer2(void) interrupt 5 using 3
{
TF2 = 0;//中断标志清除( Timer2必须软件清标志!)
if(CheckValue==0x32)
return 0x00;
Delay1ms(10);
KeyTemp = P2&0x32;
if(KeyTemp==CheckValue)
return 0x00;
if(!(CheckValue&0x02))
Key|=0x01;
if(!(CheckValue&0x10))
LEDShow(0x7FFF>>LEDIndex);
else
LEDShow(~(0xFFFE<<LEDIndex));
}
if(LEDIndex==15)
{
LEDDirection = !LEDDirection;
if(LEDDirection)LEDFlag = !LEDFlag;
}
LEDIndex = (LEDIndex+1)%16;
LEDIndex = (LEDIndex+1)%16;
}
//Mode 7
void Mode_7(void)
{
if(LEDDirection)
LEDShow(0x003F<<LEDIndex);
else
LEDShow(0xFC00>>LEDIndex);
if(LEDIndex==9)
LEDDirection = !LEDDirection;
}
void LEDShow(unsigned int LEDStatus)
{
P1 = ~(LEDStatus&0x00FF);
P0 = ~((LEDStatus>>8)&0x00FF);
}
void InitialCPU(void)
{
RunMode = 0x00;
TimerCount = 0;
SystemSpeedIndex = 10;
LEDIndex = (LEDIndex+1)%10;
}
//Mode 8
void Mode_8(void)
{
LEDShow(++LEDIndex);
}
void TimerEventRun(void)
{
if(RunMode==0x00)
{
Mode_0();
}
else if(RunMode ==0x01)
LEDIndex = (LEDIndex+1)%16;
}
//Mode 3
void Mode_3(void)
{
if(LEDDirection)
LEDShow(~(0x0001<<LEDIndex));
else
LEDShow(~(0x8000>>LEDIndex));
if(LEDIndex==15)
LEDDirection = !LEDDirection;
LEDIndex = (LEDIndex+1)%16;
}
//Mode 4
void Mode_4(void)
{
if(LEDDirection)
{
if(LEDFlag)
LEDShow(0xFFFE<<LEDIndex);
else
LEDShow(~(0x7FFF>>LEDIndex));
}
else
{
if(LEDFlag)
LEDIndex = 0;
LEDFlag = 1;
RunMode = (RunMode+1)%9;
Diห้องสมุดไป่ตู้play(RunMode);
}
if(Key&0x02)
{
if(SystemSpeedIndex>0)
{
--SystemSpeedIndex;
SetSpeed(SystemSpeedIndex);
}
P1 = 0x00;
P0 = 0x00;
P2 = 0xFF;
P3 = 0x00;
Delay1ms(500);
P1 = 0xFF;
P0 = 0xFF;
P2 = 0xFF;
P3 = 0xFF;
SetSpeed(SystemSpeedIndex);
Display(RunMode);
}
//Mode 0
unsigned int LEDIndex = 0;
TH2 = RCAP2H = 0xFC;//重装值,初始值TL2 = RCAP2L = 0x18;
ET2=1;//定时器2中断允许
TR2 = 1;//定时器2启动
EA=1;
}
unsigned int code SpeedCode[]={ 1, 2, 3, 5, 8, 10, 14, 17, 20, 30,
{
Mode_1();
}
else if(RunMode ==0x02)
{
Mode_2();
}
else if(RunMode ==0x03)
{
Mode_3();
}
else if(RunMode ==0x04)
{
Mode_4();
}
else if(RunMode ==0x05)
{
Mode_5();
}
else if(RunMode ==0x06)
}
//Mode 6
void Mode_6(void)
{
if(LEDDirection)
LEDShow(~(0x000F<<LEDIndex));
else
LEDShow(~(0xF000>>LEDIndex));
if(LEDIndex==15)
LEDDirection = !LEDDirection;
#include <REG52.H>
unsigned char RunMode;
//**********************************System Fuction*************************************************
void Delay1ms(unsigned int count)
main()
{
unsigned char Key;
InitialCPU();
InitialTimer2();
while(1)
{
Key = GetKey();
if(Key!=0x00)
{
KeyDispose(Key);
}
}
}
Key|=0x02;
if(!(CheckValue&0x20))
Key|=0x04;
return Key;
}
unsigned int TimerCount,SystemSpeed,SystemSpeedIndex;
void InitialTimer2(void)
{
T2CON = 0x00;//16 Bit Auto-Reload Mode
else
{
LEDFlash(6);
}
}
if(Key&0x04)
{
if(SystemSpeedIndex<28)
{
++SystemSpeedIndex;
SetSpeed(SystemSpeedIndex);
}
else
{
LEDFlash(6);
}
}
}
//***********************************************************************************
{
unsigned int i,j;