仿生机器人的设计与仿真分析
仿生四足机器人步态规划与仿真研究

仿生四足机器人步态规划与仿真研究1. 引言1.1 研究背景仿生四足机器人是一种模仿动物四足行走方式的机器人,具有良好的稳定性和适应性,被广泛用于恢复性医疗、紧急救援、军事作战等领域。
随着人工智能和机器人技术的不断发展,仿生四足机器人的研究也变得越来越重要。
在仿生四足机器人的步态规划和仿真研究中,如何设计出稳定且高效的行走模式成为研究的重点之一。
近年来,随着计算机仿真技术的不断进步,仿生四足机器人的步态规划和仿真研究取得了一系列重要进展。
通过计算机模拟仿生四足机器人的步态和动作,研究人员可以更好地了解机器人行走时的力学特性和运动规律,为机器人的控制和优化提供有力支持。
本文将对仿生四足机器人步态规划与仿真研究进行深入探讨,旨在为仿生四足机器人的设计与控制提供理论支持和实验基础。
通过对步态规划算法、仿真模型建立、实验结果分析以及研究展望和应用前景的讨论,将全面展示仿生四足机器人的发展现状和未来发展方向,为相关领域的研究工作提供有益参考。
1.2 研究目的研究目的是为了解决传统固定步态规划方法在应对复杂环境和不确定性时存在的不足之处,提高仿生四足机器人的运动稳定性和适应性。
通过研究仿生四足机器人的步态规划算法,探索其在不同地形和工作条件下的运动模式,为其设计提供更加智能和高效的运动策略。
通过建立仿真模型,验证步态规划算法的有效性,并进一步探索优化算法。
研究将通过实验结果来验证仿生四足机器人步态规划算法的可行性和有效性,为进一步开发基于仿生原理的机器人提供参考和借鉴。
通过深入研究仿生四足机器人的步态规划与仿真,探讨未来在智能机器人领域的发展方向和挑战,为该领域的研究提供新的思路和方法。
1.3 研究意义仿生四足机器人的研究意义主要体现在以下几个方面:1. 提高机器人的稳定性和适应性:仿生四足机器人可以模仿动物在不同地形上行走的方式,通过合理的步态规划算法,可以使机器人在复杂环境中保持稳定,提高其适应性和灵活性。
人体仿生机器人的设计与实现
人体仿生机器人的设计与实现人类自古以来一直在追求模拟和复制自然界中的生物体,在机器人领域也不例外。
人体仿生机器人就是一种可以模拟人类动作和行为的机器人。
它的设计和实现需要工程师不断地研究人类的解剖学和生理学知识,为机器人的材质、功能和控制系统提供参考。
下面,我们将探讨人体仿生机器人的设计和实现。
一、材质选择材质的选择对于人体仿生机器人的设计来说至关重要。
机器人需要具备与人类身体相似的柔韧性和强度,同时还要具有耐久性和可维修性。
传统的机器人使用金属和塑料等材质,但这些材质通常缺乏弹性和柔韧性。
因此,在人体仿生机器人的设计中,使用新型的材料,如导电聚合物和柔性材料,可以提高机器人的柔韧性并减轻机器人重量。
二、机械结构机械结构是人体仿生机器人的骨架,其设计必须借鉴人体骨骼和肌肉的结构。
如果机器人的机械结构过于复杂和臃肿,那么机器人就无法进行高难度的动作。
因此,在机械结构的设计中,要尽量简化部件数量,减少机械结构的重量,提高机器人的敏捷度和稳定性,以便适应不同的环境和场景。
三、运动控制系统人体仿生机器人还需要一个高效的运动控制系统,以便模拟人体肌肉的收缩和放松。
这个系统需要可以实现人类大脑和肌肉的相互协调,以实现人工智能和高度精确的运动控制。
这需要研究人体运动控制系统的神经学原理,并通过模拟和仿真来提高机器人控制系统的性能。
四、感知系统感知系统是人体仿生机器人的眼睛和耳朵。
它能够模拟人类的视觉、听觉、触觉和嗅觉,以实现机器人的环境感知和信息处理。
在感知系统的设计中,需要借鉴人体器官的结构和作用,以提高机器人对外部环境的适应能力和反应速度。
同时,还需要研究语音识别、图像识别和运动跟踪等技术,以进一步提高机器人的感知能力。
五、应用场景人体仿生机器人的应用场景非常广泛,可以用于工业生产、医疗卫生、军事防御、服务机器人等领域。
但同时,这些应用场景也带来了技术挑战,因为不同的应用场景需要不同类型的机器人。
例如,医疗机器人需要更加精密的控制系统,以支持手术和治疗;而服务机器人需要更加智能化的感知和控制系统,以支持人机交互和服务。
人体肌肉的仿生机器人设计
人体肌肉的仿生机器人设计近年来,人体仿生机器人成为了仿生学领域的研究热点之一、仿生机器人的目标是通过模仿生物的结构和功能,实现类似于人体的动作和行为。
在这方面,人体肌肉是其中一个重要的研究对象。
下面将介绍一个人体肌肉的仿生机器人设计。
设计思路:人体肌肉是由肌肉组织和神经组织组成的。
肌肉组织可以收缩和松弛,从而实现身体的运动。
神经组织负责传递信号,控制肌肉收缩和松弛的程度。
因此,我们的仿生机器人的设计思路是模拟人体肌肉组织和神经组织的结构和功能。
机械结构:机器人的机械结构应该能够模拟人体肌肉的收缩和松弛。
我们可以采用一种类似于零散肌肉束的设计。
每个肌肉束由一个弹性体制成,中间有一根绳索连接着。
绳索可以向两个方向拉动弹性体,实现收缩和松弛的效果。
所有肌肉束由一个集中控制的系统控制。
这种设计可以使机器人具备高度自由的运动能力。
神经系统模拟:机器人的神经系统模拟可以采用类似于电子神经网络的技术。
每个肌肉束都有与之对应的控制单元,负责向肌肉束发送信号,控制其收缩和松弛。
这些控制单元相互连接,形成一个神经网络。
这样,在人机交互中,可以通过输入控制信号来模拟神经系统的激活过程,从而实现机器人的运动。
电力供应和数据处理:为了使机器人肌肉能够收缩和松弛,需要提供电力供应。
我们可以使用一种先进的电池技术,如锂离子电池,来为机器人提供持久的电力。
数据处理部分需要一个小型的中央处理器,负责集中控制和处理传感器的输入信号,控制机器人的运动。
仿真和训练:在设计阶段,可以使用计算机仿真软件来模拟机器人的运动。
通过在仿真环境中不断调整肌肉束的参数和神经网络的结构,逐步优化机器人的动作和行为。
此外,对于机器人的训练也非常重要。
可以利用深度学习等技术,通过大量样本的训练和反馈,提高机器人的动作准确性和运动自由度。
应用和前景:人体肌肉的仿生机器人有着广泛的应用前景。
它可以被用于医疗领域,如康复治疗和辅助外科手术。
机器人肌肉还可以用于制造业,如装配线上的自动化操作。
仿生机器人设计方法及其运动控制研究

仿生机器人设计方法及其运动控制研究随着科技的不断进步,人类对仿生技术的研究也越来越深入。
仿生机器人,一种以仿生学原理为基础的机器人,是近年来备受瞩目的研究领域。
仿生机器人的研究旨在实现自然界生物的智能行为和运动方式,从而提高机器人的适应性、灵活性和稳定性。
本文将介绍仿生机器人的设计方法和运动控制研究。
一、仿生机器人的设计方法1. 生物学研究仿生机器人的设计方法以生物学研究为基础,通过深入了解自然界生物的解剖结构及其功能,从中提取出认为合适的设计元素,设计出与生物类似的机器人。
我们通常采用计算机的三维建模技术来模拟生物的结构,挖掘其内在机理,并进行仿真实验。
生物学研究不仅能够帮助设计师获取和解读生物的运动信息,而且能够深化我们对生命科学的认识和了解。
2. 机械设计随着生物学研究的进展,设计师可将所得的运动机理应用于具体的机械结构设计中。
其中包括机械零件的选择、排列、联接、运动方式等,这就需要对于机械学、材料力学、电气控制等方面有深入的了解。
设计的机械结构需要在仿生学理论基础上尽可能地简化,以期达到更好的稳定性和可操作性。
3. 人机交互方案在仿生机器人的设计中,人机交互方案也起着至关重要的作用。
好的人机交互方案使机器人更好地适应人类需求、更准确地执行任务。
一个好的机器人设计应该在人机交互方案中注重交互接口设计和程序的编写。
特别是,对于启示设计理念的生物中心,应将人机交互方案的设计和软件实现作为整个仿生机器人研究的重点。
二、仿生机器人的运动控制研究1.传感技术传感技术也是实现仿生机器人运动控制的一种重要手段。
通过安装各种接受外界信息的传感器,我们可以更好的掌握机器人在运动中的状态,例如位置、速度、方向、载荷等,从而实现智能控制。
与此同时,也可以运用传感技术来实现机器人与人机的交互环节,从而更好地实现人机协作。
2.智能控制技术智能控制技术通常包括人造神经网络、本体逻辑、模糊推理、基于规则的技术和基于模型的控制技术等。
仿生猴子设计说明

仿生猴子设计说明仿生机器人是一种模仿真实生物形态与功能的机器人。
仿生猴子作为其中的一种,是基于猴子的生物特征和行为特点进行设计的机器人。
它将生物学、计算机科学、机械工程等多个学科结合起来,旨在模拟和复制猴子的动作、表情和行为,以实现人机交互、助力人类工作和提升生活质量的功能。
1.总体设计理念:仿生猴子的总体设计理念是追求高度仿真和人机互动。
在外观上,仿生猴子采用橡胶材质的皮肤,使用智能仿生表情模块和运动机构,能够模拟出猴子的表情、动作和语调。
在功能上,仿生猴子具备图像识别、语音识别和智能控制等能力,能够与人类进行实时交互和合作。
2.外观设计:仿生猴子的外观设计主要包括头部、身体、四肢等部分。
头部采用3D打印技术打造,通过摄像头模块和图像处理算法实现实时人脸识别和表情模拟。
猴子的嘴巴和眼睛部分将使用特殊材料制作,具备可活动的嘴角和眼球。
身体采用柔软的橡胶材质,能够模仿猴子的肌肉和骨骼结构,以达到更逼真的动作表现。
四肢采用电机驱动和传感器控制,具备抓握和行走的功能。
3.功能设计:(1)图像识别功能:仿生猴子内置高清摄像头,能够实时捕捉周围环境和人类表情。
借助图像处理算法,它可以识别人类面部表情,从而模拟出相应的表情。
(2)语音识别功能:仿生猴子具备语音输入和语音输出的能力。
通过语音识别模块,它能理解人类的语音指令,并做出相应的反应。
同时,它也能以猴子的语调和声音回应人类的提问。
(3)运动控制功能:仿生猴子的四肢采用多个电机驱动和传感器控制,能够实现抓握、行走和跳跃等动作。
通过体验反馈算法,它可以根据外界环境和人类指令做出相应的动作。
(4)智能控制功能:仿生猴子内置智能控制芯片,能够学习和适应人类的习惯和行为。
它可以学习人类的动作和表情,并在后续的交互过程中自主做出相应的反应。
4.应用场景:仿生猴子的应用场景非常广泛。
首先,它可以应用于娱乐领域,作为家庭机器人,陪伴儿童玩耍和学习。
其次,它可以应用于医疗领域,作为康复机器人,帮助行动不便的患者进行康复训练和日常生活的辅助。
仿生机器人控制系统设计及其应用

仿生机器人控制系统设计及其应用近年来,随着科技的不断发展,人工智能、机器人技术等方面的应用也得到了越来越广泛的应用,其中,仿生机器人是一个备受关注的领域。
仿生机器人是指以仿真生物体的方式来实现机器人的设计和制造,使得机器人的结构和动作更加接近生物体的形态和运动方式,提高机器人的稳定性和适应性,从而更好地完成各种任务。
为了实现仿生机器人运动的精准控制,需要设计一套有效的控制系统。
本文主要介绍仿生机器人控制系统的设计及其应用。
一、仿生机器人控制系统的结构仿生机器人控制系统主要包括传感器、执行器、控制器三个模块。
其中,传感器用于感知机器人周围环境的信息,如温度、湿度、光强度等,以及机器人自身的运动状态信息,如角度、速度、加速度等。
传感器获取的信息通过电子信号传递给控制器,控制器根据这些信息进行运算、分析和判断,进而控制执行器的动作。
执行器是机器人运动的实际载体,它根据控制器的指令,控制机器人的各个部分进行运动。
二、仿生机器人控制系统的设计如何设计一套高效的仿生机器人控制系统呢?首先,需要明确机器人运动的目标和任务,如机器人是否需要完成定点移动、自主导航、搬运等任务。
其次,需要根据机器人的结构和运动方式选择合适的传感器和执行器,以及配备一套高效、快速的控制器。
接下来,需要根据机器人的运动模式和控制器的运算速度确定机器人的控制周期,并选择合适的通信协议和通信方式。
最后,对机器人控制系统进行验证和测试,不断优化控制算法和控制器的运算速度和稳定性。
三、仿生机器人控制系统的应用仿生机器人控制系统的应用非常广泛,不仅可以应用于军事、制造业、医疗等领域,还可以应用于家庭、办公室等日常生活中。
以上应用场合中,军事领域是仿生机器人控制系统的大力推动者。
现代军事对于机器人的需求越来越高,从而驱动了仿生机器人控制系统的不断提升。
制造业领域,仿生机器人也有着广泛的应用。
在制造业生产线上,仿生机器人可以承担许多重复性、危险性高的任务,提高生产效率和人员安全性。
仿生学在机器人技术研究中的应用案例分析

仿生学在机器人技术研究中的应用案例分析人工智能和机器人技术的发展已经取得了重大突破,仿生学正逐渐成为机器人技术研究的重要方向之一。
仿生学是通过模仿生物体的结构和功能,将其应用于机器人设计和开发中。
本文将以1800字左右的篇幅,通过案例分析,探讨仿生学在机器人技术研究中的应用。
案例一:鸟类仿生机器人鸟类仿生机器人是一种通过模仿鸟类的飞行姿态和机械结构,设计和制造的机器人。
这种仿生机器人可以实现像真实鸟类一样的飞行表现和机动能力。
通过对鸟类翅膀的结构和运动方式的研究,科学家们设计出了一种类似鸟翼的机械结构,使得仿生机器人可以更加灵活地飞行和机动。
仿生学在鸟类仿生机器人的研究中被广泛应用,如仿鸟翼结构的设计、鸟类飞行姿态的模拟等。
这一技术的应用不仅能够提高机器人飞行效率,还可以应用于无人侦察、空中测绘等领域,具有重要的应用价值。
案例二:鱼类仿生机器人鱼类仿生机器人是一种通过模仿鱼类的游泳姿态和结构,设计和制造的机器人。
仿生学在鱼类仿生机器人的研究中发挥了重要作用,能够帮助科学家们理解鱼类在水中的游泳方式和动作机理。
通过仿生学的方法,科学家们设计出了类似鱼类的鳍和尾巴结构,使得仿生机器人可以像真实鱼类一样游动。
这种仿生机器人不仅在水下探测和水生生物学研究中具有重要应用,还可以用于海底考古、水下作业等领域。
案例三:昆虫仿生机器人昆虫仿生机器人是一种通过模仿昆虫的结构和行为,设计和制造的机器人。
昆虫在细小环境中具有出色的适应能力和行动能力,利用仿生学的方法,科学家们可以借鉴昆虫的结构和行为特点,设计制造更加灵活和具有敏捷性的机器人。
通过仿真昆虫的感知机构、运动机制和智能行为,科学家们开发出了一系列昆虫仿生机器人,如模拟蚂蚁的行为模式的聚集式探索机器人、模仿蜜蜂的轨迹搜索算法的飞行器等。
这些仿生机器人在农业、环境监测、救援等领域有着广泛的应用前景。
案例四:植物仿生机器人植物仿生机器人是一种通过模仿植物的结构和生长机制,设计和制造的机器人。
仿生学及其在机器人控制领域应用案例剖析
仿生学及其在机器人控制领域应用案例剖析近年来,随着科技的快速发展和人工智能的兴起,机器人控制领域逐渐成为研究和技术创新的焦点之一。
而在机器人控制领域中,仿生学被广泛应用,为机器人的设计和控制提供了新的灵感和思路。
本文将通过剖析两个应用案例来探讨仿生学在机器人控制领域的具体应用。
案例一:鱼类仿生机器人的设计与控制鱼类拥有出色的水动力学性能,其高度灵活的运动能力和高效的推进方式成为仿生学研究的热点之一。
海洋生物中的鱼类运动方式受到广泛的模仿和研究,以期将其运动形态和技术应用于机器人控制领域。
研究人员通过分析鱼类的运动方式和骨骼结构,设计出一种仿鱼类运动的水下机器人。
该机器人结合了机械控制、水动力学和控制算法等多种技术,能够高度灵活地在水下进行运动。
机器人的鱼类仿生设计包括了鱼鳍、尾鳍和身体的形状和结构,使其能够在水中具有类似鱼类的运动能力和稳定性。
在机器人控制方面,研究人员通过传感器获取机器人在水中的运动和环境信息,并通过控制算法进行数据处理和运动控制。
通过仿真实验和实际测试,研究人员验证了仿生机器人的水动力学性能和运动效果。
仿生机器人在水下进行各种任务,如水下勘探、海底维修等,展现了其在机器人控制领域中的广泛应用前景。
案例二:昆虫仿生机器人的设计与控制昆虫拥有令人叹为观止的机械结构和感知能力,其高度适应各种复杂环境的特点成为仿生学研究中的重要对象。
昆虫仿生机器人的设计与控制将昆虫的解剖结构和行为特征与机械工程相结合,为机器人的运动和感知提供了新的思路。
研究人员通过分析昆虫的外形结构和运动方式,设计出一种仿生昆虫机器人。
该机器人模仿了昆虫的身体革检、触觉和视觉感知等特性,并通过传感器和控制系统实现对机器人的控制。
仿生机器人能够模拟昆虫的行走、飞行和感知动作,具备昆虫在不同环境中的适应能力。
在机器人控制方面,研究人员通过跟踪昆虫的运动和感知行为,开发出一种适应机器人的控制算法。
通过对机器人的实时运动和环境感知进行控制,仿生机器人能够自主完成多种任务,如环境监测、信息收集等。
仿生蝠鲼机器人的设计及仿真
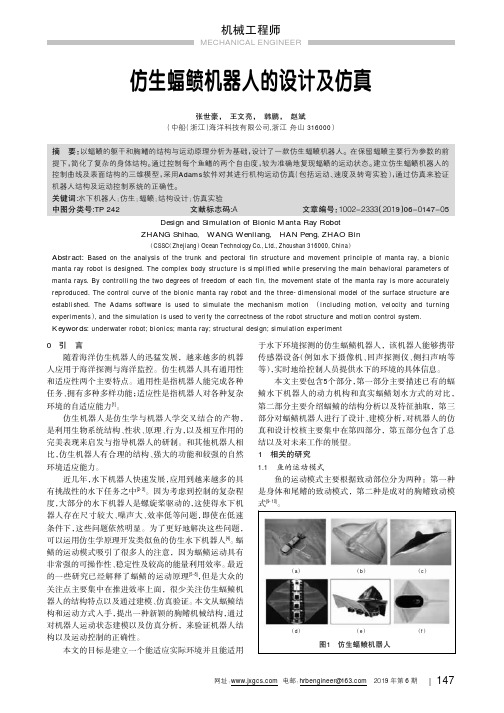
仿生蝠鲼机器人的设计及仿真张世豪,王文亮,韩鹏,赵斌(中船(浙江)海洋科技有限公司,浙江舟山316000)摘要:以蝠鲼的躯干和胸鳍的结构与运动原理分析为基础,设计了一款仿生蝠鲼机器人。
在保留蝠鲼主要行为参数的前提下,简化了复杂的身体结构。
通过控制每个鱼鳍的两个自由度,较为准确地复现蝠鲼的运动状态。
建立仿生蝠鲼机器人的控制曲线及表面结构的三维模型,采用Adams软件对其进行机构运动仿真(包括运动、速度及转弯实验),通过仿真来验证机器人结构及运动控制系统的正确性。
关键词:水下机器人;仿生;蝠鲼;结构设计;仿真实验中图分类号:TP242文献标志码:A文章编号:1002-2333(2019)06-0147-05Design and Simulation of Bionic Manta Ray RobotZHANG Shihao,WANG Wenliang,HAN Peng,ZHAO Bin(CSSC(Zhejiang)Ocean Technology Co.,Ltd.,Zhoushan316000,China)Abstract:Based on the analysis of the trunk and pectoral fin structure and movement principle of manta ray,a bionic manta ray robot is designed.The complex body structure is simplified while preserving the main behavioral parameters of manta rays.By controlling the two degrees of freedom of each fin,the movement state of the manta ray is more accurately reproduced.The control curve of the bionic manta ray robot and the three-dimensional model of the surface structure are established.The Adams software is used to simulate the mechanism motion(including motion,velocity and turning experiments),and the simulation is used to verify the correctness of the robot structure and motion control system. Keywords:underwater robot;bionics;manta ray;structural design;simulation experiment0引言随着海洋仿生机器人的迅猛发展,越来越多的机器人应用于海洋探测与海洋监控。
《2024年一种新型四足仿生机器人性能分析与仿真》范文
《一种新型四足仿生机器人性能分析与仿真》篇一一、引言四足仿生机器人是一种以自然界生物为蓝本,具有高度仿生学和动态稳定性的机器人技术。
随着科技的不断发展,新型四足仿生机器人的设计与研究越来越受到重视。
本文旨在深入分析一种新型四足仿生机器人的性能,并通过仿真实验来验证其设计及功能实现的可行性。
二、新型四足仿生机器人设计与技术概述该新型四足仿生机器人设计采用了先进的机械结构设计、高性能的驱动系统和精确的控制系统。
机器人具备高度仿真的四足运动能力,能够在复杂地形中实现稳定行走和灵活运动。
此外,该机器人还具备较高的环境适应性,能够在不同环境下进行作业。
三、性能分析1. 运动性能:该新型四足仿生机器人采用先进的运动控制算法,使机器人能够快速、准确地完成各种动作。
在复杂地形中,机器人能够保持动态平衡,实现稳定行走。
此外,机器人还具备快速反应能力,能够在短时间内完成紧急动作。
2. 负载能力:该机器人具备较高的负载能力,能够在不同环境下承载重物进行作业。
通过优化机械结构和驱动系统,提高了机器人的负载能力,从而拓宽了其应用范围。
3. 环境适应性:该机器人具备较高的环境适应性,能够在多种环境中进行作业。
例如,在室外环境中,机器人能够应对不同的地形和气候条件;在室内环境中,机器人能够进行精确的定位和操作。
4. 能源效率:采用高效能电池和节能控制算法,使机器人在保证性能的同时,实现了较低的能源消耗。
这有助于延长机器人的工作时间,提高其使用效率。
四、仿真实验为了验证该新型四足仿生机器人的性能,我们进行了仿真实验。
仿真实验中,我们模拟了不同地形和环境条件,对机器人的运动性能、负载能力和环境适应性进行了测试。
实验结果表明,该机器人在各种环境下均能实现稳定行走和灵活运动,且具备较高的负载能力和环境适应性。
此外,机器人的能源效率也得到了显著提高。
五、结论通过对一种新型四足仿生机器人的性能分析与仿真实验,我们得出以下结论:1. 该机器人具备高度仿真的四足运动能力,能够在复杂地形中实现稳定行走和灵活运动。
六足仿蜘蛛机器人的结构设计与仿真分析

六足仿蜘蛛机器人的结构设计与仿真分析一、概述随着科技的飞速进步,机器人技术已经逐渐渗透到各个领域,特别是在仿生机器人领域,其研究与应用更是取得了显著的成果。
六足仿蜘蛛机器人作为仿生机器人的一种,其结构设计与仿真分析是当前研究的热点之一。
六足仿蜘蛛机器人是一种模拟蜘蛛行走方式的机器人,具有适应性强、稳定性高、运动灵活等优点。
通过模拟蜘蛛的六足行走机制,该机器人能够在复杂环境中实现高效、稳定的运动,具有重要的应用价值。
在结构设计方面,六足仿蜘蛛机器人需要考虑多个因素,包括机械结构、驱动方式、运动学分析等。
机械结构是机器人的基础,需要合理设计各部件的尺寸、形状和连接方式,以实现机器人的稳定行走和灵活运动。
驱动方式的选择直接影响到机器人的运动性能和效率,常见的驱动方式包括电机驱动、液压驱动等。
运动学分析则是研究机器人运动规律的重要手段,通过对机器人运动学模型的建立和分析,可以预测和优化机器人的运动性能。
在仿真分析方面,通过建立六足仿蜘蛛机器人的虚拟样机,可以在计算机环境中进行各种实验和测试,以验证机器人设计的合理性和有效性。
仿真分析可以帮助研究人员快速发现设计中存在的问题,并进行相应的优化和改进。
仿真分析还可以为机器人的实际制造和测试提供重要的参考依据。
本文旨在探讨六足仿蜘蛛机器人的结构设计与仿真分析方法,为该类机器人的研究和应用提供有益的参考和借鉴。
1. 机器人技术的发展趋势随着科技的飞速进步,机器人技术正迎来前所未有的发展机遇。
从简单的自动化操作到复杂的智能决策,机器人技术正逐步渗透到我们生活的方方面面。
在当前的科技浪潮中,机器人技术的发展趋势呈现出以下几个显著特点。
人工智能技术的深度融合是机器人技术发展的重要方向。
随着深度学习、神经网络等技术的不断发展,机器人逐渐具备了更强的感知、理解和决策能力。
这使得机器人能够更好地适应复杂多变的环境,实现更高级别的自主操作。
机器人技术的集成化趋势日益明显。
传统的机器人往往只具备单一的功能,而现代机器人则更倾向于将多种功能集成于一体,实现一机多用。
《一种新型四足仿生机器人性能分析与仿真》范文

《一种新型四足仿生机器人性能分析与仿真》篇一一、引言四足仿生机器人是一种以自然界生物为蓝本,具有四足行走能力的机器人。
随着科技的进步和机器人技术的不断发展,四足仿生机器人的研究已经成为机器人领域的重要方向。
本文将介绍一种新型四足仿生机器人的性能分析与仿真,探讨其设计理念、技术特点以及在多种环境下的适应性。
二、新型四足仿生机器人设计理念与技术特点1. 设计理念该新型四足仿生机器人以自然界生物的生物力学特性和运动行为为灵感,结合先进的机械设计理念和机器人技术,实现四足行走、动态平衡和灵活运动等功能。
设计目标在于提高机器人的运动性能、环境适应能力和工作效率。
2. 技术特点(1)多关节驱动:该机器人采用多关节驱动技术,使四足运动更加灵活,适应不同地形和环境。
(2)动态平衡系统:通过内置的传感器和控制系统,实现机器人的动态平衡,提高行走稳定性和安全性。
(3)自适应控制算法:采用先进的控制算法,使机器人能够根据不同环境进行自适应调整,提高环境适应能力。
三、性能分析1. 运动性能分析该新型四足仿生机器人在运动性能方面表现出色。
其多关节驱动技术使得四足运动更加灵活,适应不同地形和环境。
通过动态平衡系统和自适应控制算法,机器人能够保持稳定的行走姿态,实现高效、灵活的运动。
此外,该机器人还具有较高的运动速度和负载能力,可满足多种应用需求。
2. 环境适应性分析该新型四足仿生机器人在环境适应性方面表现出色。
其自适应控制算法使机器人能够根据不同环境进行自适应调整,适应各种复杂地形和环境。
此外,该机器人还具有较高的抗干扰能力和稳定性,能够在恶劣环境下正常工作。
四、仿真实验与结果分析为了验证该新型四足仿生机器人的性能,我们进行了仿真实验。
仿真实验结果表明,该机器人在多种环境下的运动性能和环境适应性均表现出色。
具体来说,机器人在平地、坡地、沙地等不同地形上的行走能力均得到了有效验证。
此外,我们还对机器人的动态平衡和负载能力进行了测试,结果表明该机器人在这些方面也具有较高的性能。
仿生学中的机器人模拟及其应用
仿生学中的机器人模拟及其应用机器人在日常生活中的应用越来越广泛,与此同时,仿生学技术的不断发展也为机器人的设计和制造提供了更多的灵感和可能性。
仿生学是以生物学为基础对机器人进行建模和仿真的学科,通过对生物学的深入研究,将生物体的结构、功能及其内在原理应用到机器人的设计之中,不仅可以增强机器人的可靠性和灵活性,还能够满足不同领域的需求,从而为人类的生活带来更多的便利。
一、仿生学中机器人模拟的基本原理仿生学中的机器人模拟建立在对生物体形态结构的深入分析和建模之上,通过生物模型和机器模型的对比和分析,揭示生物系统的内在规律和运动原理,从而用机器模型实现类似于生物体的运动和功能。
仿生学中的机器人模拟一般分为两个关键步骤:首先是对具有典型生物体所具备的生理功能的深入了解和研究,并将从生物体中提取出来的数据导入到机器模型中;其次是根据机器模型中的特殊设计来模拟生物体所具备的特殊功能。
通过仿生学的研究,可以获得各种生命体所具有的控制机制、生理功能及其运动规律,并将之转化为机器人可操作的状态,然后通过智能控制实现机器人的自主运动和行为。
二、仿生学中机器人模拟的应用仿生学中的机器人模拟应用范围十分广泛,从医疗到科研,从生产到服务,都可以应用到机器人的制造和运用中。
以下是仿生学机器人在不同领域的几个典型应用。
1. 医疗领域仿生学机器人在医疗领域的应用极其广泛,比如手术机器人、恢复机器人、智能假肢等。
手术机器人可以实行精密微创手术,有着更高的精度和更小的错误率,可以让患者在手术过程中避免很多不必要的风险;恢复机器人则可以帮助患者进行康复训练和运动疗法,其定制化的功能和不间断的监督可以有效提高康复成功率;智能假肢可以通过传感器的感应将外界刺激转化为运动信号,从而实现人工肢体的功能。
2. 工业生产工业生产是应用机器人的非常广泛的领域之一,同时也是应用仿生学机器人的地方之一。
机器人在生产领域可以代替人类工人进行繁重、危险或精密的操作,例如:在汽车制造工厂中,机器人可以帮助人类组装精密零部件,同时又可以减轻人体的重复劳动。
基于仿生学的扑翼机设计与仿真

基于仿生学的扑翼机设计与仿真一、引言扑翼飞行器作为一种有机动能力的机器人,正在逐渐发展成为未来航空领域的重要组成部分。
而借鉴自然界的仿生学原理,是设计和优化扑翼飞行器的重要方法之一、本文旨在基于仿生学原理,设计并进行仿真分析扑翼机的运动特性和气动性能。
二、仿生学原理1.鸟类翅膀结构:鸟类翅膀的设计使得它们能够在空气中产生升力。
研究发现,鸟类翅膀呈现不对称的形状,上下表面的弯度不同。
这种不对称形状可以产生升力,并且还能减小气动阻力。
2.鸟类振翅模式:鸟类扑动翅膀的频率和振幅对飞行稳定性和效率至关重要。
实验观察发现,鸟类在起飞和飞行过程中,翅膀往往呈现上下振动和回旋运动的特点。
这种振翅模式可以减小气动阻力,并提高机体的机动能力。
在扑翼机的设计过程中,我采用了三维设计软件,模拟仿真扑翼机的运动特性和气动性能,并对设计参数进行优化。
1.扑翼机的翅膀结构2.扑翼机的振翅模式利用软件模拟了扑翼机在水平飞行和上升飞行过程中的振动频率和振幅。
通过改变振翅模式的参数,如频率和振幅,优化了扑翼机的飞行性能。
3.扑翼机的运动特性通过仿真分析,研究了扑翼机的俯仰、滚转和偏航运动特性。
通过改变机体的设计参数,如重心位置和机翼的位置,优化了扑翼机的运动性能和稳定性。
四、仿真结果与分析通过仿真分析,得出了扑翼机在不同飞行状态下的运动特性和气动性能。
结果表明,优化后的扑翼机具有较高的飞行效率和稳定性。
1.升力和阻力分析通过模拟扑翼机在不同速度下的飞行,得出了升力和阻力的变化曲线。
结果表明,在适当的速度范围内,扑翼机可以产生足够的升力,实现平稳的飞行。
2.振翅模式分析通过模拟扑翼机的振翅模式,得出了振翅频率和振幅对飞行稳定性和效率的影响。
结果表明,在一定的振翅频率和振幅范围内,扑翼机可以实现较高的机动能力和飞行效率。
3.运动特性分析通过模拟扑翼机的运动特性,得出了俯仰、滚转和偏航运动的变化曲线。
结果表明,优化后的扑翼机具有较高的运动稳定性和操控性能。
柔性四足步态仿生机器人的机械系统设计与功能仿真开题报告

[9]熊有伦.机器人技术基础[M].武汉:华中理工大学出版社,1996,8:15-23页,65-67,59
[10]马香峰.机器人机构学[M].北京:机械工业出版社,1991,9:23-26
[11]邓奇,具弹性躯干仿生四足机器人准被动动力学研究,上海交通大学博士学位论文,2012.9
6.中期检查:第二学期第十周(05.11-05.17)
7.预计小组答辩:2015年6月10日至2015年6月12日
8.预计公开答辩:2015年6月15日至2015年6月21日
9.上报成绩时间:第十六周(这是把成绩提交到教务处的时间)
指导
教师
意见
指导教师签字___________
年月日
院系
毕业
设计
领导
西南科技大学毕业设计(论文)开题报告
学院
制造科学与工程学院
专业班级
机械设计制造及其自动化
姓名
学号
题目
柔性四足步态仿生机器人的机械系统设计与功能仿真
题目类型
应用研究
一、选题背景及依据(简述国内外研究现状、生产需求状况,说明选题目的、意义,列出主要参考文献)
(一)选题目的、意义
移动是机器人最为重要的能力之一。利用可移动的机器人系统,人类可以实现危险或复杂环境下的作业。目前陆上移动机器人采用的移动方式主要有蠕动式、轮式、履带式和足式。其中蠕动式运动速度慢,主要应用于诸如管道、废墟等狭小空间内的作业。与蠕动式机器人相比,轮式和履带式速度较快,结构简单,控制方便,运动能耗小,应用范围较广。但是地球表面的许多区域都不适合轮式或者履带式的机器人通行,如不平坦的石床和陡峭的山坡等,这些客观存在的地表特征在一定程度上限制了机器人的活动范围。反观陆地上的四足哺乳动物,它们对地球表面的复杂地形有着极强的适应能力,如山羊能够攀爬陡峭的山崖、雪撬犬能在北极的积雪中来去自如、猎豹能够从隐藏的草丛中瞬间启动并加速至极速以捕食猎物。这些哺乳动物的运动能力是目前绝大多数轮式或履带式交通工具所无法比拟的。为了增强机器人的地形适应能力,扩大人类对自然的探索领域,模仿自然界生物的足式运动特点的足式机器人一直是研究热点之一。根据足的数量,可将现有的足式机器人分为双足、四足、六足、八足甚至更多。其中,四足机器人由于具有稳定性好、环境适应与承载能力强、能实现高速移动等优点,尤其受到国内外机器人研究学者的重视对四足机器人而言,速度是评价机器人性能的重要指标之一。过低的运动速度将会限制四足机器人在未知地形探索、外星球探索、灾情险情救援以及军事等应用范围。因此,在当前的四足机器人研究中,实现机器人的高速奔跑、弹跳越障、吸能减震正在逐渐成为研究的重点。
《2024年新型轮腿式机器人的设计与仿真》范文

《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的飞速发展,机器人技术已成为现代工业、军事、医疗、救援等多个领域的重要支撑。
其中,新型轮腿式机器人以其独特的运动方式和适应能力,逐渐成为研究的热点。
本文将详细介绍新型轮腿式机器人的设计理念、结构特点及仿真分析,以期为相关研究提供参考。
二、设计理念新型轮腿式机器人结合了轮式和腿式机器人的优点,具有较高的移动性能和适应能力。
设计理念主要体现在以下几个方面:1. 高效移动:轮腿式机器人能够在不同地形中灵活移动,提高移动效率。
2. 适应性强:针对复杂环境,轮腿式机器人能够快速切换运动模式,提高适应能力。
3. 结构紧凑:优化机器人结构,减小体积和重量,便于携带和部署。
三、结构设计新型轮腿式机器人主要由轮式结构、腿式结构和控制系统三部分组成。
1. 轮式结构:采用多轮驱动的设计,使机器人能够在平坦地面上高速移动。
同时,轮式结构可实现360度旋转,提高机器人的灵活性。
2. 腿式结构:腿式结构采用仿生学原理设计,使机器人能够在不平整地面或复杂环境中灵活移动。
腿部采用弹簧减震系统,提高机器人的抗震性能。
3. 控制系统:控制系统是机器人的“大脑”,负责控制机器人的运动、感知和决策。
采用先进的传感器和算法,实现机器人的自主导航和避障功能。
四、仿真分析为了验证新型轮腿式机器人的性能,我们采用了虚拟仿真技术进行模拟分析。
仿真过程主要包括建立模型、设置参数、运行仿真和结果分析四个步骤。
1. 建立模型:根据机器人结构特点,在仿真软件中建立三维模型,并设置各部分参数。
2. 设置参数:根据实际需求,设置仿真参数,如运动速度、加速度、环境条件等。
3. 运行仿真:在仿真软件中运行模拟程序,观察机器人在不同环境中的运动情况。
4. 结果分析:根据仿真结果,分析机器人的运动性能、适应能力和能耗等指标。
通过仿真分析,我们发现新型轮腿式机器人在不同环境中均表现出较高的移动性能和适应能力。
在平坦地面上,机器人能够以较高速度移动;在复杂环境中,机器人能够快速切换运动模式,灵活应对各种挑战。
仿生机器人的设计与实现方法

仿生机器人的设计与实现方法仿生机器人是指通过对生物的解剖学和生理学等进行仿真与模拟,设计出具有与生物相似的外部形态、动作和内在功能的机器人。
其设计与实现方法主要包括以下几个方面:机械设计、传感器设计、神经网络控制、材料选择和能源供应等。
一、机械设计:仿生机器人的机械设计主要包括外部形态设计和内部结构设计。
外部形态设计要求机器人具有与生物相似的外形,比如头部、身体、四肢等,可以通过3D打印等技术实现。
内部结构设计要考虑机器人的运动机构和关节结构,如肌肉和骨骼系统构成的运动链条,可采用软体机器人和多自由度机械臂等结构。
二、传感器设计:仿生机器人需要通过传感器获取外部环境信息,并对其做出响应。
传感器设计包括视觉传感器、触觉传感器和力传感器等。
视觉传感器主要用于获取图像信息,可以采用摄像头和深度相机等;触觉传感器可以模拟人类皮肤感知外界接触力,可采用压力传感器和力敏电阻器等;力传感器可以用于测量机器人与外部环境的相互作用力,比如力传感器和加速度计等。
三、神经网络控制:仿生机器人的控制系统一般采用神经网络控制方法,模拟生物神经系统的工作原理。
神经网络结构主要包括感知层、隐含层和输出层,通过训练神经网络,使机器人学习运动和行为等。
神经网络的训练可以通过监督学习、强化学习和迁移学习等方法实现。
四、材料选择:五、能源供应:总之,设计与实现仿生机器人需要多学科的知识和技术支持,需要机械设计、传感器设计、控制系统设计和材料选择等方面的综合应用。
随着科学技术的发展和进步,仿生机器人的设计与实现方法还将继续完善和创新,为人类带来更多的应用和发展前景。
仿生学中的设计和模拟

仿生学中的设计和模拟近年来,随着科技的飞速发展,人们对生命科学和仿生学的研究也越来越深入。
仿生学是一个综合性学科,它以自然界为蓝本,通过研究自然界中具有高效能力和适应性的生物体的形态、结构、功能和行为等,从而为人类的科学研究和工程应用提供新的思维和方法。
仿生学中的设计和模拟是其重要的研究领域之一,本文将从这个角度来探讨仿生学的相关知识和应用。
一、仿生学的设计仿生学的设计是指将生物体的结构、形态、功能和行为等与人工产品的设计相结合,从而开发出具有更高效能力和适应性的新型产品。
这些产品可以是机器人、人工器官、飞行器、交通工具、建筑材料等。
仿生学的设计需要从多个方面进行思考,如力学、电子学、化学、材料科学等,通过综合分析不同领域的知识,对生物体的结构和功能进行深入的探究,并将其用于人工产品的开发中。
在仿生学的设计中,生物体的结构和功能是非常重要的元素。
当我们观察生物体时,我们可以发现,它们的结构是非常复杂的,但却非常高效。
例如:蚂蚁能够搬运比自身重几百倍的食物,渔鱼可以在水中高速前进,鸟儿能够在空中自由飞翔。
这些生物体的结构和功能在工程设计中也可以得到充分的应用。
例如:仿生机器人可以像蚂蚁一样搬运重物,仿生汽车可以像鱼一样在水中高速前进,仿生无人机可以像鸟一样在空中自由飞翔。
仿生学的设计可以使人工产品更加高效、节能、环保和可靠,并具有更多的功能和适应性。
二、仿生学的模拟仿生学的模拟是通过计算机模拟手段,对生物体的形态、结构、功能和行为等进行分析和研究。
这种模拟可以大大提高我们对生物体的认识和理解,进一步推动仿生学的发展。
仿生学的模拟可以分为三大类,即生物仿真、生物制图和生物分析。
1. 生物仿真生物仿真是通过计算机模拟手段,模拟生物体的行为和环境。
通过生物仿真,我们可以更加深入地理解生物体的行为和环境,并可以用于预测生物的生存状况和行动轨迹等。
例如:生物仿真可以用于调查鲸鱼在洋流中的移动和生存状况,或者用于研究鸟的飞行行为。
六足仿生机器人结构设计及运动仿真
六足仿生机器人结构设计及运动仿真
周梦;郝同鑫;闰文彬;代文杰;韩宁豪
【期刊名称】《机电工程技术》
【年(卷),期】2024(53)3
【摘要】为降低六足机器人制造成本,提高六足机器人在不同环境下的适应性,设计一款新型腿部结构的六足机器人。
该机器人使用SolidWorks软件设计结构,机械结构采用3D打印机打印制造,机器人采用圆形六足式布局,腿部关节处使用弹簧机械结构来减少伺服系统的设计,并搭配适用不同地形可拆卸的模块化足端,可以利用较少的伺服系统完成复杂的运动。
通过对机器人进行运动学分析,以3种步态为例分析了不同环境下不同步态的特点,以单腿为例建立坐标系,使用DH法对机器人腿部进行运动学分析,Adams仿真结果表明,机器人在84 mm/s的情况下运行时,机器人重心的变化在9 mm以内,满足设计要求。
机器人样机进行了不同地形下运动实验,实验结果与仿真基本一致。
仿真实验以及样机运动实验验证了这种新型腿部结构的稳定性与可靠性,说明这种腿部结构在保证稳定性的前提下能够代替同类机器人并降低伺服系统的使用,从而降低了六足机器人的生产成本。
【总页数】5页(P172-175)
【作者】周梦;郝同鑫;闰文彬;代文杰;韩宁豪
【作者单位】信阳学院理工学院
【正文语种】中文
【中图分类】TP249
【相关文献】
1.大型六足仿生平台机器人机构设计及运动仿真
2.基于ADAMS的仿生六足机器人运动仿真
3.仿生六足机器人的结构设计及运动分析
4.仿生六足机器人步态设计与运动仿真
5.关节电机驱动六足机器人仿生结构设计与柔顺运动控制
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仿生机器人的设计与仿真分析
随着人工智能和机器人技术的不断发展,仿生机器人逐渐成为了研究和应用的
热点。
仿生机器人是基于仿生学原理设计和制造的机器人,它能够模拟动物的外部形态、生理功能和行为方式,具有更高的适应性和智能性。
本文将探讨仿生机器人的设计与仿真分析。
一、仿生机器人的设计原理
仿生机器人的设计灵感来源于生物,通过模仿生物结构和行为来实现机器人的
自主运动和智能控制。
具体来说,仿生机器人的设计原理包括以下几个方面:
1、结构仿生:仿生机器人的结构要模仿生物的外形、组织和器官结构。
例如,模仿鱼类的身体结构和鳍,可以实现机器鱼的自主游动;模仿昆虫的腿部结构和步态,可以实现机器人的爬行和行走。
2、功能仿生:仿生机器人的功能要模仿生物的生理机能和感知能力。
例如,
模仿人眼的视觉系统,可以实现机器人的视觉感知和图像识别;模仿人耳的听觉系统,可以实现机器人的听觉感知和声音识别。
3、行为仿生:仿生机器人的行为要模仿生物的行为方式和智能控制。
例如,
模仿昆虫的群集行为,可以实现机器人的协作和集群智能;模仿动物的学习和适应能力,可以实现机器人的自我学习和自适应。
二、仿生机器人的系统框架
仿生机器人的系统框架包括机械结构、传感器、控制器和能源系统四个核心部分。
其中,机械结构是仿生机器人最基本的组成部分,它决定了机器人的外形、运动方式和力学性能;传感器是仿生机器人感知能力的关键,它可以采集机器人周围环境的信息,形成机器人的感知图像和数据;控制器是仿生机器人智能控制的核心,它可以根据传感器采集的信息,通过算法控制机器人的运动、姿态和动作;能源系
统是仿生机器人的能量来源,它可以提供机器人的动力和供能,保证机器人的稳定运行。
三、仿生机器人的设计流程
仿生机器人的设计流程包括机械设计、传感器设计、控制算法设计和仿真分析
四个环节。
其中,机械设计是仿生机器人的基础环节,它涉及到机器人的外形、构造和机动性能。
机械设计可以采用CAD设计软件进行建模和分析,包括机械结构
的三维建模、力学分析、运动仿真和结构优化等。
传感器设计是仿生机器人的核心环节,它涉及到机器人的感知能力和图像处理。
传感器设计可以采用传感器芯片、影像传感器和机器视觉技术等,包括传感器方案的筛选、传感器参数的选取和调校、传感器信号处理和传输等。
控制算法设计是仿生机器人的关键环节,它涉及到机器人的运动、姿态和动作
控制。
控制算法设计可以采用PID控制、模糊逻辑控制和神经网络控制等,包括
控制算法的设计、实现和优化等。
仿真分析是仿生机器人设计的重要环节,它可以评估机器人的性能和优化设计
方案。
仿真分析可以采用MATLAB/Simulink、ADAMS、SolidWorks等软件进行
仿真,包括机器人的动力学仿真、控制系统仿真、传感器数据仿真和系统优化等。
四、仿生机器人应用前景
仿生机器人具有广阔的应用前景,可以应用于机器人制造、医疗保健、环境监测、教育培训等领域。
具体来说,仿生机器人可以应用于以下几个方面:
1、机器人制造:仿生机器人可以应用于机器人制造和智能制造,例如机器人
装配、机器人焊接、机器人涂装等。
2、医疗保健:仿生机器人可以应用于医疗保健和康复工程,例如仿生手术仪器、仿生假肢、仿生外骨骼等。
3、环境监测:仿生机器人可以应用于环境监测和探测,例如仿生无人飞机、仿生水下机器人、仿生智能卫星等。
4、教育培训:仿生机器人可以应用于教育培训和科普宣传,例如仿生机器人展览、仿生机器人比赛、仿生机器人教学等。
综上所述,仿生机器人是一种颇具潜力的研究和应用领域,它通过模仿生物的结构、功能和行为,实现机器人的自主运动和智能控制。
仿生机器人的设计和仿真分析是仿生机器人研究的核心内容,它涉及到机械设计、传感器设计、控制算法设计和仿真分析等方面。
未来,我们可以期待仿生机器人在制造、医疗、环保、教育等各个领域的广泛应用。