OpenGL坐标系介绍
屏幕坐标系等常用坐标系介绍
cocos2d-x 世界坐标系、屏幕坐标系、本地坐标系、opengl坐标系
世界坐标系和OpenGL坐标系相同,都是以屏幕左下角为原点,向右为X轴的增加方向,向上为Y轴增加方向,世界即为游戏世界;
屏幕坐标系是以左上角为原点;
本地坐标系也叫节点坐标系,是相对于父节点而言的;
Director::getInstance()->convertToGL() 转换到OPENGL坐标系
Director::getInstance()->convertToUI() 转换到屏幕坐标系
Node::convertToWorldSpace() 把本地坐标系转换到世界坐标系
Node::convertToNodeSpace() 把世界坐标系转换到本地坐标系
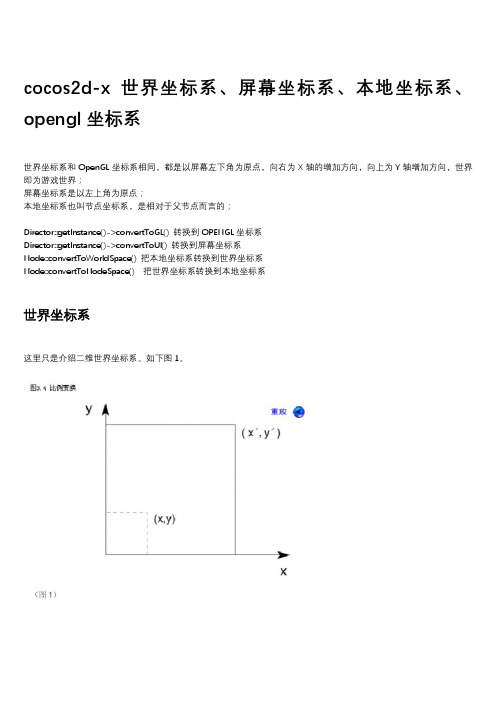
世界坐标系
这里只是介绍二维世界坐标系。
如下图1。
屏幕坐标系
屏幕坐标系,主要有两种,。
opengl定义的坐标系

OpenGL使用的是右手笛卡尔坐标系统,其中Z轴正方向垂直屏幕向外,X轴正方向从左到右,Y轴正方向从下到上。
以下是OpenGL中定义的几种坐标系:
1. **世界坐标系**:世界坐标系以屏幕中心为原点(0, 0, 0),在OpenGL中用来描述场景的坐标。
例如,可以使用这个坐标系来描述物体及光源的位置。
世界坐标系是不会被改变的。
2. **模型坐标系**:模型的绘制时使用的坐标系。
当模型发生旋转、平移等变化时,模型坐标系本身不会变化,变化的是模型在世界坐标系中的位置。
3. **视坐标系**:以视点为原点,以视线方向为Z轴正方向的坐标系。
OpenGL会将世界坐标系先变换到视坐标系,然后进行裁剪,只有在视见体之内的场景才会进入下一个阶段进行处理。
以上内容仅供参考,如需更多关于OpenGL的详情,可以查阅图形学相关的书籍或者咨询专业的技术人员。
opengl光栅化原理
opengl光栅化原理OpenGL,这个被广泛使用的图形编程接口,以其强大的功能和灵活的编程方式,在计算机图形领域占据了重要的地位。
而在OpenGL 中,光栅化(Rasterization)是一个关键步骤,它把几何形状转换成像素网格。
这篇文章将带您深入了解OpenGL中的光栅化原理。
一、引言想象一下,你正在一个巨大的画布前,手中握着一把画笔,你的任务是将那些复杂的几何形状转换成实际的像素。
这就是光栅化的过程,也是OpenGL中的核心步骤。
理解这个过程,对于我们更好地使用OpenGL,尤其是进行高效的渲染,是非常重要的。
二、基本原理1.坐标变换:首先,我们需要将几何形状的顶点从世界坐标系转换到屏幕坐标系。
这个过程通常涉及到矩阵变换,包括平移、旋转和缩放等。
2.边缘检测:在转换后的顶点上,我们需要找到相邻的像素,以确定哪些部分的形状应该被绘制出来。
这通常通过使用扫描线(scanline)方法来实现。
3.细化:通过将线段分割成更小的线段,我们可以减少绘制的复杂性。
这种方法通常涉及到使用一些算法,如Z-Buffering或扫描线算法。
4.像素填充:最后,我们将每个边缘的像素部分填充为颜色。
这通常涉及到采样颜色纹理或者使用一些插值方法来生成颜色。
三、更深入的理解1.光栅化效率和精度:在光栅化过程中,我们需要平衡效率和精度。
为了提高效率,我们可以使用一些简化的算法,如简单的扫描线算法或简单的Z-Buffering。
但是,这些算法可能会牺牲精度。
相反,更复杂的算法如PhongAntialiasing或Mipmapping可以提供更好的视觉效果,但可能会降低性能。
2.纹理映射:纹理映射是OpenGL中的一项重要功能,它允许我们在渲染时使用图像数据来替代像素的颜色。
在光栅化过程中,我们需要将纹理坐标应用到几何形状上,然后将纹理采样到对应的像素上。
这个过程涉及到很多计算和存储开销,因此我们需要使用合适的纹理过滤技术来减少这些开销。
基于OpenGL视点坐标系的三维场景旋转算法
基于 OpenGL 视点坐标系的三维场景旋转算法
关系。 旋 转 时 , 可 考 虑 把 参 考 点 m_ref 指 向 场 景 中 心 , 其 余 六 个
值需要在旋转过程中加以控制, 其中的难点有二: 第一, 用 2 个 变化量( dx, dy) 来表达视点位置 m_eye( eyex, eyey, eyez) 的变化 量; 第二, 变化过程中保持视点和参考点的连线与视线向上方 向的垂直关系。旋转质量受三个指标控制: 控制量与旋转量的 几何意义; 旋转量相对于控制量的连续程度; 旋转量对控制量 的 导 数 连 续 程 度 。这 些 指 标 关 系 到 几 何 直 观 性 、连 续 旋 转 性 、灵 敏度。
( n+1)
Ye =
( n+1)
Ye
Abstr act: In this paper, based on correlation between eye coordinate system and world coordinate system of OpenGL, a new arithmetic model of 3D scene rotation is presented using spheric coordinate system of which origin is the reference point of eye coordinate system.The model has explicit geometrical signification, can adjust the sensitiveness freely during the dragging process and keep the 3D derivative vector invariant under the condition of tantamount rotation.It is operated expediently and provides a sound means for man- machine 3D rotation operation. Keywor ds: scene rotation, derivative vector invariant, sensitiveness, OpenGL
OpenGL介绍

glaux.h: OpenGL扩展库 glut.h: OpenGL实用工具包 #include <GL/gl.h>
#include <GL/glu.h>
#include <GL/glaux.h> #include <GL/glut.h>
此外,OpenGL还提供了反走样技术,能够实现深度暗示(Depth Cue)、运动模糊(Motion Blur)、雾化(Fog)等特殊效果。
6.1.3 OpenGL的绘制流程和原理
点数据 评价器 逐点操作 基元匹配 基片 操作
显示 列表
像素 数据 像素操作
光栅化
帧缓冲区
纹理存储器
OpenGL指令从左侧进入OpenGL,有两类数据,分别是由顶点描述的几何模 型和由像素描述的位图、影像等模型,其中后者经过像素操作后直接进入光栅 化。评价器(Evaluator)用于处理输入的模型数据,例如对顶点进行转换、光照, 并把图元剪切到视景体中,为下一步光栅化做好准备。显示列表(Display List) 用于存储一部分指令,留待合适时间以便于快速处理。光栅化将图元转化成二 维操作,并计算结果图像中每个点的颜色和深度等信息,产生一系列图像的帧 缓存描述值,其生成结果称为基片(Fragment)。基片操作主要的有帧缓存的更 新、测试、融合和屏蔽操作,以及基片之间的逻辑操作和抖动(Dithering)。
第6章 OpenGL
6.1 基本介绍
6.1.1 背景情况
OpenGL(Open Graphics Library,即开放性图形库)是以SGI的 GL三维图形库为基础制定的一个开放式三维图形标准。SGI在 1992年7月发布了1.0版。 OpenGL 规 范 由 ARB(OpenGL Architecture Review Board, OpenGL结构评审委员会)负责管理,目前加入OpenGL ARB的 成员有SGI、Microsoft、Intel、IBM、SUN、Compaq、HP等公 司,它们均采用了OpenGL图形标准,许多软件厂商以OpenGL 为基础开发自己的产品,硬件厂商提供对OpenGL的支持。由 于OpenGL的广泛应用,它已经成为一个工业标准。
常用坐标系介绍及变换PPT课件

目录
• 常用坐标系介绍 • 坐标变换基础 • 坐标变换的应用 • 坐标变换的数学表达 • 坐标变换的物理意义 • 坐标变换的计算机实现
01
常用坐标系介绍
笛卡尔坐标系
01
02
03
直角坐标系
以原点为中心,x轴、y轴、 z轴分别代表三个相互垂 直的坐标轴,用于描述平 面和空间中的点。
二维坐标变换
总结词
二维坐标变换是指平面内的坐标变化, 包括平移、旋转、缩放等操作。
详细描述
二维坐标变换涉及平面内的点,可以 通过平移、旋转或缩放等操作进行坐 标变化。这种变换在平面几何、图形 处理等领域应用广泛,可以通过矩阵 运算实现快速变换。
三维坐标变换
总结词
三维坐标变换是指空间中的坐标变化,包括平移、旋转、缩放等操作。
详细描述
三维坐标变换涉及空间中的点,可以通过平移、旋转或缩放等操作进行坐标变化。这种变换在三维建模、动画制 作、机器人控制等领域应用广泛,需要使用三维矩阵运算进行实现。
03
坐标变换的应用
图形变换
图形变换是指通过数学方法将一个二维或三维图形在坐标系 中进行平移、旋转、缩放等操作,以达到改变图形位置、大是一种数值计算方法,通过将物体离散化为有限个单元,可 以分析物体的受力情况和形变程度。有限元分析在工程领域中有着广泛 的应用,可以提高设计效率和精度。
06
坐标变换的计算机实现
OpenGL中的坐标变换
投影变换
将三维场景投影到二维屏 幕上,包括正交投影和透 视投影。
视图变换
将场景中的坐标系与观察 者的坐标系进行关联,实 现视景体裁剪。
旋转变换不改变图形的大小和形状, 只改变其方向。
OpenGL空间(坐标系)变换

OpenGL空间(坐标系)变换⽹友的《3D图形学的学习策略》⼀⽂使我深受启发,在图形学以及openGL学习⽅⾯给了我很有价值的指导性意见,在此对前辈们的不吝赐教表⽰感激,谢谢你们的⽆私分享。
如⽂章所说,API是⼯具,不是本质,OpenGL/Direct3D的本质是图形学,⽽不是OpenGL/Direct3D的本⾝,API的本⾝只是⼀些Interface⽽已。
最重要的,最根本的是,你要明⽩这些API背后的图形学的原理---因为那才是根本中的根本。
其实很多事情,包括学习也涉及到⽣活,只有抓住了本质,才能体会到其中的真谛。
带着这种希望探究本质的学习⽅法,结合图形学原理,通过阅读书⽬和⽹友们的⽂章,我对OpenGL⼏何空间变换进⾏了总结性的学习。
OpenGL处理管线的⽬的是将对象的三维描述转换为可以显⽰的⼆维图像。
为了完成这个从三维到⼆维的转换,OpenGL 使⽤了多个空间(坐标系),每个空间完成特定的任务,从⼀个空间到另⼀个空间需要进⾏空间转换。
理解OpenGL所使⽤的各种空间以及它们间的变换是⾮常重要的。
如上图所⽰,openGL中使⽤的空间依次是:对象空间、世界空间、视点空间、裁剪空间、归⼀化设备空间、窗⼝空间、屏幕空间。
结合⾃⼰的理解,就每个空间完成的基本任务和空间的变换关系,总结如下。
对象空间。
对象空间中完成的最⼤任务是对象建模,三维对象的属性,包括顶点位置和表⾯法线等是在这个空间内指定的。
这个空间的坐标原点⼀般在对象上,有时候也在其他地⽅,主要是为了建模⽅便。
每⼀个对象都有⼀个⾃⼰的对象空间。
就openGL⽽⾔,我⽬前还没有接触到建⽴很复杂模型的应⽤,建模⼀般在其他地⽅如3DMAX中完成,然后读⼊openGL进⾏处理。
世界空间。
对象空间之后是世界空间,我理解为世界坐标系是固定不变的。
世界空间主要是对三维场景进⾏描述,就是把已经建⽴的各种对象摆放在三维空间中,空间的转换是通过模型变换完成的。
可以通过平移、旋转、⽐例缩放等把对象摆放在需要的位置,就好像买好家具以后设计房间布局⼀样。
坐标系与右手定则
坐标系与右手定章(OpenInventor运用的坐标体系)坐标系与右手定章(OpenInventor运用的坐标体系)(转)在三维坐标系中,Z轴的正轴偏向是依据右手定章肯定的.右手定章也决议三维空间中任一坐标轴的正扭转偏向.要标注X.Y和Z轴的正轴偏向,就将右手背对着屏幕放置,拇指即指向X轴的正偏向.伸出食指和中指,如右图所示,食指指向Y轴的正偏向,中指所指导的偏向等于Z轴的正偏向.要肯定轴的正扭转偏向,如右图所示,用右手的大拇指指向轴的正偏向,曲折手指.那么手指所指导的偏向等于轴的正扭转偏向.Open Inventor 对3D 数据运用的是右手坐标系,从屏幕内指向外,暗示 z 轴的正偏向.所有的角度单位都是弧度.对象都是在本身的局部坐标系空间下进行描写的,既众所周知的"对象坐标系空间"(object coordinate space).当场景中的所有物体都已经进行完坐标变换后,那么它们就都在"世界坐标系空间"下描写了(world coordinate space).拍照机和灯光节点处于世界坐标系空间下.三维坐标系三维坐标系三维笛卡儿坐标系是在二维笛卡儿坐标系的基本上依据右手定章增长第三维坐标(即Z轴)而形成的.同二维坐标系一样,AutoCAD中的三维坐标系有世界坐标系WCS(World Coordinate System)和用户坐标系UCS(User Coordinate System)两种情势.目次睁开1.右手定章在三维坐标系中,Z轴的正轴偏向是依据右手定章肯定的.右手定章也决议三维空间中任一坐标轴的正扭转偏向.要标注X.Y和Z轴的正轴偏向,就将右手背对着屏幕放置,拇指即指向X轴的正偏向.伸出食指和中指,如右图所示,食指指向Y轴的正偏向,中指所指导的偏向等于Z轴的正偏向.要肯定轴的正扭转偏向,如右图所示,用右手的大拇指指向轴的正偏向,曲折手指.那么手指所指导的偏向等于轴的正扭转偏向.2.世界坐标系(WCS)在AutoCAD中,三维世界坐标系是在二维世界坐标系的基本上依据右手定章增长Z轴而形成的.同二维世界坐标系一样,三维世界坐标系是其他三维坐标系的基本,不克不及对其从新界说.3.用户坐标系(UCS)用户坐标系为坐标输入.操纵平面和不雅察供给一种可变动的坐标系.界说一个用户坐标系即转变原点(0,0,0)的地位以及XY平面和Z轴的偏向.可在AutoCAD的三维空间中任何地位定位和定向UCS,也可随时界说.保管和复用多个用户坐标系.详见本章第3节.三维坐标情势在AutoCAD中供给了下列三种三维坐标情势:1.三维笛卡尔坐标三维笛卡尔坐标(X,Y,Z)与二维笛卡尔坐标(X,Y)类似,即在X和Y 值基本上增长Z值.同样还可以运用基于当前坐标系原点的绝对坐标值或基于上个输入点的相对坐标值.2.圆柱坐标圆柱坐标与二维极坐标类似,但增长了从所要肯定的点到XY平面的距离值.即三维点的圆柱坐标可经由过程该点与UCS原点连线在XY平面上的投影长度,该投影与X轴夹角.以及该点垂直于XY平面的Z值来肯定.例如,坐标“10<60,20”暗示某点与原点的连线在XY平面上的投影长度为10个单位,其投影与X轴的夹角为60度,在Z轴上的投影点的Z值为20.圆柱坐标也有相对的坐标情势,如相对圆柱坐标“@ 10<45 ,30”暗示某点与上个输入点连线在XY平面上的投影长为10个单位,该投影与X轴正偏向的夹角为45度且Z轴的距离为30个单位.3.球面坐标球面坐标也类似与二维极坐标.在肯定某点时,应分离指定该点与当前坐标系原点的距离,二者连线在XY平面上的投影与X轴的角度,以及二者连线与XY平面的角度.例如,坐标“10<45<60”暗示一个点,它与当前UCS原点的距离为10个单位,在XY平面的投影与X轴的夹角为45度,该点与XY平面的夹角为60度.同样,圆柱坐标的相对情势标清楚明了某点与上个输入点的距离,二者连线在XY平面上的投影与X轴的角度,以及二者连线与XY平面的角度.数学中经常运用的三种三维坐标系三维笛卡尔坐标(X,Y,Z)是在三维笛卡尔坐标系下的点的表达式,个中,x,y,z分离是失去配合的零点且彼此互相正交的x轴,y轴,z轴的坐标值.圆柱坐标(ρ,θ,z)是圆柱坐标系上的点的表达式.设P(x,y,z)为空间内一点,则点P也可用如许三个有次序的数ρ,θ,z来肯定,个中ρ为点P在xoy平面的投影M与原点的距离,θ为有向线段PO在xoy平面的投影MO与x轴正向所夹的角.圆柱坐标系和三维笛卡尔坐标系的点的坐标的对应关系是,x=ρcosθ,y=ρsinθ,z=z.球面坐标系由到原点的距离.方位角.仰角三个维度构成. 球面坐标(ρ,θ,φ)是球面坐标系上的点的表达式.设P(x,y,z)为空间内一点,则点P也可用如许三个有次序的数r,φ,θ来肯定,个中r为原点O与点P 间的距离,θ为有向线段与z轴正向所夹的角,φ为从正z轴来看自x轴按逆时针偏向转到有向线段的角,这里M为点P在xOy面上的投影.如许的三个数r,φ,θ叫做点P的球面坐标,这里r,φ,θ的变更规模为 r∈[0,+∞), φ∈[0, 2π], θ∈[0, π] . r = 常数,即以原点为心的球面; θ= 常数,即以原点为极点.z轴为轴的圆锥面; φ= 常数,即过z轴的半平面. 个中x=rsinθcosφ y=rsinθsinφ z=rcosθ笛卡尔坐标系是直角坐标系和斜角坐标系的统称.订交于原点的两条数轴,构成了平面仿射坐标系.如两条数轴上的器量单位相等,则称此仿射坐标系为笛卡尔坐标系.两条数轴互相垂直的笛卡尔坐标系,称为笛卡尔直角坐标系,不然称为笛卡尔斜角坐标系.仿射坐标系和笛卡尔坐标系平面向空间的推广订交于原点的三条不共面的数轴构成空间的仿射坐标系.三条数轴上器量单位相等的仿射坐标系被称为空间笛卡尔坐标系.三条数轴互相垂直的笛卡尔坐标系被称为空间笛卡尔直角坐标系,不然被称为空间笛卡尔斜角坐标系.笛卡尔坐标,它暗示了点在空间中的地位,和直角坐标有差别,两种坐标可以互相转换.举个例子:某个点的笛卡尔坐标是493 ,454, 967,那它的X轴坐标就是4+9+3=16,Y轴坐标是4+5+4=13,Z轴坐标是9+6+7=22,是以这个点的直角坐标是(16, 13, 22),坐标值不成能为负数(因为三个天然数相加无法成为负数).这个应当是了右手定章在三维坐标系中,Z轴的正轴偏向是依据右手定章肯定的.右手定章也决议三维空间中任一坐标轴的正扭转偏向.要标注X.Y和Z轴的正轴偏向,就将右手背对着屏幕放置,拇指即指向X轴的正偏向.伸出食指和中指,食指指向Y轴的正偏向,中指所指导的偏向等于Z轴的正偏向三维坐标系与几何学Microsoft® Direct3D®运用程序须要熟习三维几何学道理.本节介绍创建三维场景所需的最主要的几何概念.本节涉及到以下主题.这些主题给读者供给了一个对Direct3D运用程序所涉及到的根本概念的高层描写.更多有关这些主题的信息,请参阅更多的信息.三维坐标系平日三维图形运用程序运用两种笛卡尔坐标系:左手系和右手系.在这两种坐标系中,正x轴指向右面,正y轴指向上面.经由过程沿正x轴偏向到正y轴偏向握拳,大姆指的指向就是响应坐标体系的正z轴的指向.下图显示了这两种坐标体系.Microsoft® Direct3D®运用左手坐标系.假如正在移植基于右手坐标系的运用程序,必须将传给Direct3D的数据做两点转变.•颠倒三角形极点的次序,如许体系会从正面以顺时针的偏向遍历它们.换句话说,假如极点是v0,v1,v2,那么以v0,v2,v1的次序传给Direct3D.•用不雅察矩阵对世界空间中的z值取反.要做到这一点,将暗示不雅察矩阵的D3DMATRIX构造的_31._32._33和_34成员的符号取反.要得到等同于右手系的后果,可以运用D3DXMatrixPerspectiveRH和D3DXMatrixOrthoRH函数界说投影矩阵.但是,要当心运用D3DXMatrixLookAtRH函数,并响应地颠倒不和剔除的次序及放置立方体谅图.固然左手坐标系和右手坐标系是最为经常运用的体系,但在三维软件中还运用很多其它坐标系.例如,对三维建模运用程序而言,运用y轴指向或背向不雅察者的坐标体系并不是罕有.在这种情形下,随意率性轴(x,y或z)的正半轴指向不雅察者的被界说为右手系.随意率性轴(x,y或z)的正半轴背向不雅察者的被界说为左手系.假如正在移植一个基于左手系进行建模的运用程序,z 轴向上,那么除了前面的步调外,还必须扭转所有的极点数据(译注:假如本来的坐标系为正x轴向里,正y轴向左,正z轴向上,那么传给Direct3D的极点的x值对应本来的y值,y值对应本来的z值,z值对应本来的x值,亦即扭转极点数据).对三维坐标体系中界说的三维物体履行的最根本操纵是变换.扭转和缩放.可以归并这些根本变换以创建一个新的变换矩阵.细节请参阅三维变换.即使归并雷同的变换操纵,不合的归并次序得到的成果是不成交流的——矩阵相乘的次序很主要.三维图元三维图元是构成单个三维实体的极点聚集.三维坐标体系中最简略的图元是点的聚集,称为点表.平日三维图元是多边形.一个多边形是由至少三个极点描写的三维形体.最简略的多边形是三角形.Microsoft® Direct3D®运用三角形构成大多半多边形,因为三角形的三个极点必定是共面的.运用程序可以用三角形组合成大而庞杂的多边形及网格(mesh).下图显示了一个立方体.立方体的每个面由两个三角形构成.全部三角形的聚集构成了一个立方体图元.可以将纹理和材质运用于图元的概况使它们看起来像是实心的.可以运用三角形创建具有滑腻曲面的图元.下图显示了若何用三角形模仿一个球体.运用了材质后,衬着得到的球体看起来是曲折的.假如运用高洛德着色,成果更是如斯.更多信息请参阅高洛德着色.概况和极点法向量网格中的每个面有一个垂直的法向量.该向量的偏向由界说极点的次序及坐标体系是左手系照样右手系决议.概况法向量从概况上指向正向面那一侧,假如把概况程度放置,正向面朝上,背向面朝下,那么概况法向量为垂直于概况从下方指向上方.在Microsoft® Direct3D®中,只有面的正向是可视的.一个正向面是极点按照顺时针次序界说的面.任何不是正向面的面都是背向面.因为Direct3D不老是衬着背向面,是以背向面要被剔除.假如想要衬着背向面的话,可以转变剔除模式.更多信息请参阅剔除状况.Direct3D在盘算高洛德着色.光照和纹理后果时运用极点法向.Direct3D运用极点法向盘算光源和概况间的夹角,对多边形进行高洛德着色.Direct3D盘算每个极点的色彩和亮度值,并对图元概况所笼罩的所有像素点进行插值.Direct3D运用夹角盘算光强度,夹角越大,概况得到的光照就越少.假如正在创建的物体是平直的,可将极点法向设为与概况垂直,如下图所示.该图界说了一个由两个三角形构成的平直概况.但是,更可能的情形是物体由三角形带(triangle strips)构成且三角形不共面.要对全部三角形带的三角形腻滑着色的一个简略办法是起首盘算与极点相联系关系的每个多边形概况的概况法向量.可以如许盘算极点法向,使极点法向与极点所属的每个概况的法向的夹角相等.但是,对庞杂图元来说这种办法可能不敷有用.这种办法如下图所示.图中有两个概况,S1与S2,它们的邻边在上方.S1与S2的法向量用蓝色显示.极点的法向量用红色显示.极点法向量与S1概况法向的夹角和极点法向量与S2概况法向的夹角雷同.当对这两个概况进行光照盘算和高洛德着色时,得到成果是中央的边被腻滑着色,看起来像是弧形的(而不是有棱角的).假如极点法向偏向与它相联系关系的某个面,那么会导致谁人面上的点光强度的增长或削减.下图显示了一个例子.这些面的邻边依旧朝上.极点法向偏向S1,与极点法向与概况法向有雷同的夹角比拟,这使极点法向与光源间的夹角变小.可以用高洛德着色在三维场景中显示一些有清楚边沿的物体.要达到这个目标,只要在须要产生清楚边沿的概况交线处,把概况法向复制给交线处极点的法向,如下图所示.假如运用DrawPrimitive办法衬着场景,要将有锐利边沿的物体界说为三角形表,而非三角形带.当将物体界说为三角形带时,Direct3D会将它作为由多个三角形构成的单个多边形处理.高洛德着色被同时运用于多边形每个概况的内部和概况之间.成果产生概况之间腻滑着色的物体.因为三角形表由一系列不相连的三角形面构成,所以Direct3D对多边形每个面的内部运用高洛德着色.但是,没有在概况之间运用高洛德着色.假如三角形表的两个或更多的三角形是相邻的,那么在它们之间看起来会有一条锐利边沿.另一种可选的办法是在衬着具有锐利边沿的物体时转变到平面着色模式.这在盘算上是最有用的办法,但它可能导致场景中的物体不如用高洛德着色衬着的物体真实.三角形光栅化轨则极点指定的点经常不克不及准确地对应到屏幕上的像素.此时,Microsoft® Direct3D®运用三角形光栅化轨则决议对于给定三角形运用哪个像素.三角形光栅化轨则Direct3D在填充几何图形时运用左上填充商定(top-left filling convention).这与Microsoft Windows®的图形装备接口(GUI)和OpenGL 中的矩形运用的商定雷同.Direct3D中,像素的中间是决议点.假如中间在三角形内,那么该像素就是三角形的一部分.像素中间用整数坐标暗示.这里描写的Direct3D运用的三角形光栅化轨则不必定实用于所有可用的硬件.测试可以发明这些轨则的实现间的细微变更.下图显示了一个左上角为(0,0),右下角为(5,5)的矩形.正如大家想象的那样,此矩形填充25个像素.矩形的宽度由right减left界说.高度由bottom减top界说.在左上填充商定中,上暗示程度span在垂直偏向上的地位,左暗示span中的像素在程度偏向上的地位.一条边除非是程度的,不然不成能是顶边——一般来说,大多半三角形只有左边或右边.左上填充商定肯定当一个三角形穿过像素的中间时Direct3D采纳的动作.下图显示了两个三角形,一个在(0,0),(5,0)和(5,5),另一个在(0,5),(0,0)和(5,5).在这种情形下第一个三角形得到15个像素(显示为黑色),而第二个得到10个像素(显示为灰色),因为公用边是第一个三角形的左边.假如运用程序界说一个左上角为(0.5,0.5),右下角为(2.5,4.5)的矩形,那么这个矩形的中间在(1.5,2.5).当Direct3D光栅化器tessellate这个矩形时,每个像素的中间都毫无异义地分离位于四个三角形中,此时就不须要左上填充商定.下图显示了这种情形.矩形内的像素依据在Direct3D中被哪个三角形包含做了响应的标注.假如将上例中的矩形移动,使之左上角为(1.0,1.0),右下角为(3.0,5.0),中间为(2.0,3.0),那么Direct3D运用左上角填充商定.这个矩形中大多半的像素跨越两个或更多的三角形的鸿沟,如下图所示.这两个矩形会影响到雷同的像素.点.线光栅化轨则点和点精灵一样,都被衬着为与屏幕边沿对齐的四边形,是以它们运用与多边形同样的衬着轨则.非抗锯齿线段的衬着轨则与GDI运用的轨则完整雷同.更多有关抗锯齿线段的衬着,请参阅ID3DXLine.点精灵光栅化轨则对点精灵和patch图元的衬着,就似乎先把图元tessellate成三角形,然后将得到的三角形进行光栅化.更多信息,请参阅点精灵.矩形贯串Microsoft® Direct3D®和Microsoft Windows®编程,都是用术语包抄矩形来评论辩论屏幕上的物体.因为包抄矩形的边老是与屏幕的边平行,是以矩形可以用两个点描写,左上角和右下角.当在屏幕长进行位块传输(Blit = Bit block transfer)或射中检测时,大多半运用程序运用RECT构造保管包抄矩形的信息.C++中,RECT构造有如下界说.typedef struct tagRECT {LONG left; //这是左上角的x坐标.LONG top; //这是左上角的y坐标.LONG right; //这是右下角的x坐标.LONG bottom; //这是右下角的y坐标.} RECT, *PRECT, NEAR *NPRECT, FAR *LPRECT;在上例中,left和top成员是包抄矩形左上角的x-和y-坐标.类似地,right 和bottom成员构成右下角的坐标.下图直不雅地显示了这些值.为了效力.一致性及易用性, Direct3D所有的presentation函数都运用矩形.三角形插值对象(interpolants)在衬着时,流水线会贯串每个三角形的概况进行极点数据插值.有五种可能的数据类型可以进行插值.极点数据可所以各类类型的数据,包含(但不限于):漫反射色.镜面反射色.漫反射阿尔法(三角形透明度).镜面反射阿尔法.雾因子(固定功效流水线从镜面反射的阿尔法分量中取得,可编程极点流水线则从雾存放器中取得).极点数据经由过程极点声明界说.对一些极点数据的插值取决于当前的着色模式,如下表所示.着色模式描写平面在平面着色模式下只对雾因子进行插值.对所有其它的插值对象,全部面都运用三角形第一个极点的色彩.高洛德在所有三个极点间进行线性插值.依据不合的色彩模子,对漫反射色和镜面反射色的处理是不合的.在RGB色彩模子中,体系在插值时运用红.绿和蓝色彩分量.色彩的阿尔法成员作为单独的插值对象看待,因为装备驱动程序可以以两种不合的办法实现透明:运用纹理混杂或运用点画法(stippling).可以用D3DCAPS9构造的ShadeCaps成员肯定装备驱动程序支撑何种插值.向量.极点和四元数贯串Microsoft® Direct3D®,极点用于描写地位和偏向.图元中的每个极点由指定其地位的向量.色彩.纹理坐标和指定其偏向的法向量描写.四元数给三元素向量的[ x, y, z]值增长了第四个元素.用于三维扭转的办法,除了典范的矩阵以外,四元数是另一种选择.四元数暗示三维空间中的一根轴及环绕该轴的一个扭转.例如,一个四元数可能暗示轴(1,1,2)和1度的扭转.四元数包含了有价值的信息,但它们真正的威力源自可对它们履行的两种操纵:合成和插值.对四元数进行插值与合成它们类似.两个四元数的合成如下暗示:将两个四元数的合成运用于几何体意味着“把几何体绕axis2轴扭转rotation2角度,然后绕axis1轴扭转rotation1角度”.在这种情形下,Q暗示绕单根轴的扭转,该扭转是先后将q2和q1运用于几何体的成果.运用四元数,运用程序可以盘算出一条从一根轴和一个偏向到另一根轴和另一个偏向的腻滑.合理的路径.是以,在q1和q2间插值供给了一个从一个偏向变更到另一个偏向的简略办法.当同时运用合成与插值时,四元数供给了一个看似庞杂而现实简略的操纵几何体的办法.例如,假想我们愿望把一个几何体扭转到某个给定偏向.我们已经知道愿望将它绕axis2轴扭转r2度,然后绕axis1轴扭转r1度,但是我们不知道最终的四元数.经由过程运用合成,我们可以在几何体上合成两个扭转并得到最终单个的四元数.然后,我们可以在原始四元数和合成的四元数间进行插值,得到两者之间的腻滑转换.Direct3D扩大(D3DX)对象库包含了帮忙用户运用四元数的函数.例如,D3DXQuaternionRotationAxis函数给一个界说扭转轴的向量增长一个扭转值,并在由D3DXQUTERNION构造界说的四元数中返回成果.别的,D3DXQuaternionMultiply函数合成四元数,D3DXQuaternionSlerp函数在两个四元数间进行球面线性插值(spherical linear interpolation).Direct3D运用程序可以运用下列函数简化对四元数的运用.Direct3D运用程序可以运用下列函数简化对三成员向量的运用.D3DX对象库供给的数学函数中包含了很多帮助函数,可以简化对二成员和四成员向量的运用.。
OpenGL之坐标变换
实用标准文案投影变即几何变换、OpenGL通过相机模拟、可以实现计算机图形学中最基本的三维变换,还实现了矩阵堆栈等。
理解掌握了有关坐标变OpenGL换、裁剪变换、视口变换等,同时,换的内容,就算真正走进了精彩地三维世界。
中的三维物体的显示一、OpenGL(一)坐标系统显示二维的但计算机本身只能处理数字,在现实世界中,所有的物体都具有三维特征,图形,将三维物体及二维数据联系在一起的唯一纽带就是坐标。
这为了使被显示的三维物体数字化,要在被显示的物体所在的空间中定义一个坐标系。
这个坐标系称为世界坐标个坐标系的长度单位和坐标轴的方向要适合对被显示物体的描述,系。
世界坐标系是始终固定不变的。
也就是坐标系以物体的中心为还定义了局部坐标系的概念,所谓局部坐标系,OpenGL当物体模型进行旋这时,坐标原点,物体的旋转或平移等操作都是围绕局部坐标系进行的,如果对物体需要注意的是,转或平移等操作时,局部坐标系也执行相应的旋转或平移操作。
如果缩放比例在案各坐标轴上不同,则局部坐标系也要进行相应的缩放,模型进行缩放操作,无论是在世界坐标系中进行转局部坐标轴之间可能不再相互垂直。
那么再经过旋转操作后,只是不同的坐标系考虑的转换方式不换还是在局部坐标系中进行转换,程序代码是相同的,同罢了。
这就要在图形显要在图形显示器上显示,计算机对数字化的显示物体作了加工处理后,这个坐标系坐标轴的方这个坐标系称为屏幕坐标系。
示器屏幕上定义一个二维直角坐标系,向通常取成平行于屏幕的边缘,坐标原点取在左下角,长度单位常取成一个象素。
(二)三维物体的相机模拟为了说明在三维物体到二维图象之间,需要经过什么样的变换,我们引入了相机)模拟的方式,假定用相机来拍摄这个世界,那么在相机的取景器中,就存在人(Camera 眼和现实世界之间的一个变换过程。
精彩文档.实用标准文案中的各种坐标变换图一、相机模拟OpenGL从三维物体到二维图象,就如同用相机拍照一样,通常都要经历以下几个步骤:1、将相机置于三角架上,让它对准三维景物,它相当于OpenGL中调整视点的位置,即视点变换(Viewing Transformation)。
OpenGL功能简介
OpenGL基本功能(9/11)
反走样(Antialiasing)
线段在计算机中是通过一系列的像素来近似 逼近的,而这些像素实际上是一个个的小正 方形,因此线段常常呈锯齿状,这被称为走 样(Aliasing) OpenGL通过计算线段对各个像素的不同覆盖 率来实现反走样(Antialiasing)
顶点数据 Vertex data 求值器 Evaluators
对每个顶点的操作以及 图元装配 Per-vertex operations and primitive assembly
OpenGL渲染流水线(14/20)
光栅化(Rasterization)
光栅化负责将几何数据和像素数据转换为片元 (Fragment) 片元和将来要显示的像素一一对应 为每一个片元指定颜色和深度值 雾(Fog)、纹理(Texture)操作
对每个顶点的操作和图元装配顶点数据顶点数据vertexdata求值器求值器evaluators对每个顶点的操作以及图元装配图元装配pervertexoperationsandprimitiveassembly对每个顶点的操作以及顶点顶点vertex模型视图矩阵模型视图矩阵modelviewmatrix投影矩阵投影矩阵projectmatrix透视除法透视除法perspectivedivision视区变换视区变换viewporttransform对象坐标对象坐标object人眼坐标人眼坐标eye裁剪裁剪clip归一化归一化normalize窗口坐标窗口坐标windowopengl渲染流水线1420
OpenGL基本功能(7/11)
光照和材质
在现实生活中,物体因为受光照射和自身对 各种频率光波的吸收与反射能力的不同,而 呈现各自不同的颜色 OpenGL的实现
opengl坐标系 和笛卡尔坐标系

opengl坐标系和笛卡尔坐标系(原创实用版)目录I.OpenGL 坐标系和笛卡尔坐标系的概念II.OpenGL 坐标系的转换过程A.世界坐标系B.裁剪空间C.标准化设备坐标III.笛卡尔坐标系旋转矩阵的应用A.旋转矩阵的定义B.旋转矩阵的举例IV.结论正文一、OpenGL 坐标系和笛卡尔坐标系的概念OpenGL 坐标系是计算机图形学中的一种坐标系,用于描述 3D 空间中的点、线和面。
在 OpenGL 中,坐标系可分为世界坐标系和当前绘图坐标系。
世界坐标系以屏幕中心为原点,屏幕右下角为 z 轴正方向,屏幕右上角为 z 轴负方向。
当前绘图坐标系是绘制物体时的坐标系,初始时与世界坐标系重合,但可以通过平移、旋转和缩放等变换进行调整。
笛卡尔坐标系是一种直角坐标系,由 x 轴、y 轴和 z 轴组成,原点位于坐标系的交点处。
在计算机图形学中,笛卡尔坐标系通常用于表示2D 平面上的点。
二、OpenGL 坐标系的转换过程在 OpenGL 中,将笛卡尔坐标系下的点转换到世界坐标系需要经历以下过程:1.将笛卡尔坐标系下的点 (x, y, z) 转换到齐次裁剪空间。
具体做法是将 x、y、z 坐标分别除以裁剪面的参数 w,得到齐次坐标 (x/w, y/w, z/w, 1)。
2.将齐次裁剪空间下的点转换到标准化设备坐标 (Normalized Device Coordinates, NDC) 空间。
这个空间的坐标范围是 [-1, 1],并且原点位于裁剪空间的中心。
具体转换过程是将齐次坐标乘以 2 并减去1,即 (x/w - 1/2, y/w - 1/2, z/w - 1/2, 1)。
3.将 NDC 空间下的点转换到世界坐标系。
这个过程需要考虑视图矩阵、投影矩阵和模型矩阵。
具体做法是将 NDC 坐标乘以逆视图矩阵,再乘以逆投影矩阵,最后乘以模型矩阵,得到世界坐标系下的点。
三、笛卡尔坐标系旋转矩阵的应用在 OpenGL 中,要对一个点进行旋转,需要使用旋转矩阵。
OpenGL中的glLoadIdentity、glTranslatef、glRotatef原理
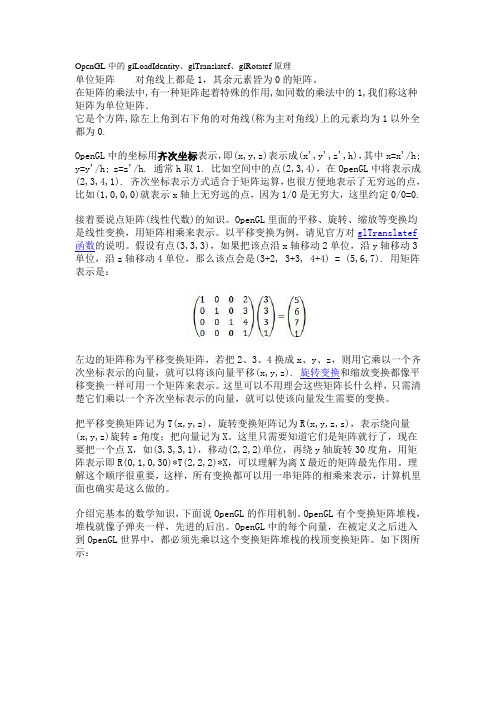
OpenGL中的glLoadIdentity、glTranslatef、glRotatef原理单位矩阵对角线上都是1,其余元素皆为0的矩阵。
在矩阵的乘法中,有一种矩阵起着特殊的作用,如同数的乘法中的1,我们称这种矩阵为单位矩阵.它是个方阵,除左上角到右下角的对角线(称为主对角线)上的元素均为1以外全都为0.OpenGL中的坐标用齐次坐标表示,即(x,y,z)表示成(x',y',z',h),其中x=x'/h; y=y'/h; z=z'/h. 通常h取1. 比如空间中的点(2,3,4),在OpenGL中将表示成(2,3,4,1). 齐次坐标表示方式适合于矩阵运算,也很方便地表示了无穷远的点,比如(1,0,0,0)就表示x轴上无穷远的点,因为1/0是无穷大,这里约定0/0=0.接着要说点矩阵(线性代数)的知识。
OpenGL里面的平移、旋转、缩放等变换均是线性变换,用矩阵相乘来表示。
以平移变换为例,请见官方对glTranslatef 函数的说明。
假设有点(3,3,3),如果把该点沿x轴移动2单位,沿y轴移动3单位,沿z轴移动4单位,那么该点会是(3+2, 3+3, 4+4) = (5,6,7). 用矩阵表示是:左边的矩阵称为平移变换矩阵,若把2、3、4换成x、y、z,则用它乘以一个齐次坐标表示的向量,就可以将该向量平移(x,y,z). 旋转变换和缩放变换都像平移变换一样可用一个矩阵来表示。
这里可以不用理会这些矩阵长什么样,只需清楚它们乘以一个齐次坐标表示的向量,就可以使该向量发生需要的变换。
把平移变换矩阵记为T(x,y,z),旋转变换矩阵记为R(x,y,z,s),表示绕向量(x,y,z)旋转s角度;把向量记为X。
这里只需要知道它们是矩阵就行了,现在要把一个点X,如(3,3,3,1),移动(2,2,2)单位,再绕y轴旋转30度角,用矩阵表示即R(0,1,0,30)*T(2,2,2)*X,可以理解为离X最近的矩阵最先作用。
OpenGL ES总结(二)OpenGL坐标变换之平移及旋转
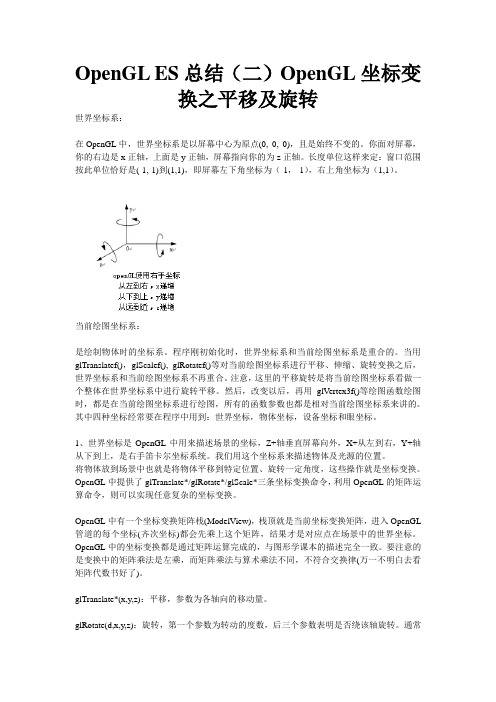
OpenGL ES总结(二)OpenGL坐标变换之平移及旋转世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。
你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。
长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右上角坐标为(1,1)。
当前绘图坐标系:是绘制物体时的坐标系。
程序刚初始化时,世界坐标系和当前绘图坐标系是重合的。
当用glTranslatef(),glScalef(), glRotatef()等对当前绘图坐标系进行平移、伸缩、旋转变换之后,世界坐标系和当前绘图坐标系不再重合。
注意,这里的平移旋转是将当前绘图坐标系看做一个整体在世界坐标系中进行旋转平移。
然后,改变以后,再用glVertex3f()等绘图函数绘图时,都是在当前绘图坐标系进行绘图,所有的函数参数也都是相对当前绘图坐标系来讲的。
其中四种坐标经常要在程序中用到:世界坐标,物体坐标,设备坐标和眼坐标。
1、世界坐标是OpenGL中用来描述场景的坐标,Z+轴垂直屏幕向外,X+从左到右,Y+轴从下到上,是右手笛卡尔坐标系统。
我们用这个坐标系来描述物体及光源的位置。
将物体放到场景中也就是将物体平移到特定位置、旋转一定角度,这些操作就是坐标变换。
OpenGL中提供了glTranslate*/glRotate*/glScale*三条坐标变换命令,利用OpenGL的矩阵运算命令,则可以实现任意复杂的坐标变换。
OpenGL中有一个坐标变换矩阵栈(ModelView),栈顶就是当前坐标变换矩阵,进入OpenGL 管道的每个坐标(齐次坐标)都会先乘上这个矩阵,结果才是对应点在场景中的世界坐标。
OpenGL中的坐标变换都是通过矩阵运算完成的,与图形学课本的描述完全一致。
要注意的是变换中的矩阵乘法是左乘,而矩阵乘法与算术乘法不同,不符合交换律(万一不明白去看矩阵代数书好了)。
OPENGL坐标系介绍 世界坐标系和当前绘图坐标系区别
OPENGL坐标系介绍世界坐标系和当前绘图坐标系区别
OPENGL坐标系可分为:世界坐标系和当前绘图坐标系。
世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。
你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。
长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右上角坐标为(1,1)。
当前绘图坐标系:是绘制物体时的坐标系。
程序刚初始化时,世界坐标系和当前绘图坐标系是重合的。
当用glTranslatef(),glScalef(), glRotatef()等对当前绘图坐标系进行平移、伸缩、旋转变换之后,世界坐标系和当前绘图坐标系不再重合。
注意,这里的平移旋转是将当前绘图坐标系看做一个整体在世界坐标系中进行旋转平移。
然后,改变以后,再用glVertex3f()等绘图函数绘图时,都是在当前绘图坐标系进行绘图,所有的函数参数也都是相对当前绘图坐标系来讲的。
齐次坐标只讲三维的情况啊
向量空间中,只有标量和向量
向量+ 向量= 向量
标量* 向量= 向量
三维向量空间中,可以视任意一组线性无关的向量为基
基V = [v1 ,v2 ,v3 ]
其他向量可以用一个三维的元组来表示
向量a = [A1 ,A2 ,A3 ]
于是向量a = A1 * v2 + A2 * v2 + A3 * v3
仅有向量是无法表示几何的,至少要有点吧
一般认为点的表示也是一个三维的元组
点b = [B1 ,B2 ,B3 ]
这样就无法区分点和向量了,咋办?。
基于OpenGL的虚拟现实技术

基于OpenGL的虚拟现实技术虚拟现实(VR)是一种模拟现实情境的技术,通过利用计算机图像和声音,用户可以沉浸在模拟的环境中。
VR技术可以应用于游戏、影视、培训、娱乐、医疗等领域。
基于OpenGL的虚拟现实技术是VR技术中最受欢迎的技术之一,因为OpenGL是跨平台、开源且功能强大的图形库。
OpenGL是一种用于计算机图形学的应用程序接口(API),它可以提供许多用于绘制2D和3D图形的函数。
OpenGL的跨平台性是其最大的优势之一,因为它可以在多个操作系统上运行,而不必重写代码。
另一个优势是OpenGL是开源的,任何人都可以查看和修改其源代码。
由于这些优势,OpenGL成为了虚拟现实技术中一个非常流行的图形库。
OpenGL使用基于3D坐标系的方法来绘制3D图形。
3D坐标系由三个轴组成:X轴、Y轴和Z轴。
X轴表示从左往右的方向,Y轴表示从下往上的方向,Z轴表示从屏幕里面往外面的方向。
OpenGL使用点、线、三角形等基本图形来构成复杂的3D图形。
为了创建VR内容,可以使用专门的软件工具,如Unity和Unreal Engine。
这些工具使用了基于OpenGL的引擎来创建VR应用程序。
在创建VR应用程序时,需要考虑运行VR应用程序的硬件和软件要求。
VR应用程序需要较高的帧率和分辨率,否则用户可能会感到晕眩和不适。
在VR应用程序中,用户可以使用虚拟现实头戴式显示器(HMD)来沉浸在虚拟环境中。
HMD通常包括两个小屏幕,一个屏幕放在每个眼睛前面,以提供3D效果。
此外,HMD还包括传感器和控制器,以便用户可以与虚拟环境交互。
VR技术已经在各个领域得到了广泛应用。
在游戏方面,VR游戏可以提供更为丰富的沉浸体验,让玩家感觉自己真的身临其境。
在培训方面,VR技术可以提供一个安全的、可重复的环境,使学生可以在不会对现实产生负面影响的情况下获得实践经验。
在医疗方面,VR技术可以帮助医生进行手术模拟和治疗,以提高治疗的准确性和成功率。
详解OpenGL的坐标系、投影和几何变换
详解OpenGL的坐标系、投影和几何变换作者:charlee 按:我也是在迷茫中走过来的,初学OpenGL时,略微了解了一些有关变换的基本知识,但是却不知道具体的使用方法,因此经常需要在布置场景时反复调整各种参数。
当我终于有一天明白了它们的用法时,就觉得应该把这些心得体会写下来,让那些和我一样曾经迷茫过的人能够迅速地找到出路。
本文的读者对象为那些初学OpenGL,了解了一些坐标系、几何变换等基本知识,但是又不知道具体应该如何运用这些操作的人。
如果你对OpenGL一无所知,建议你先去学学OpenGL的基本知识。
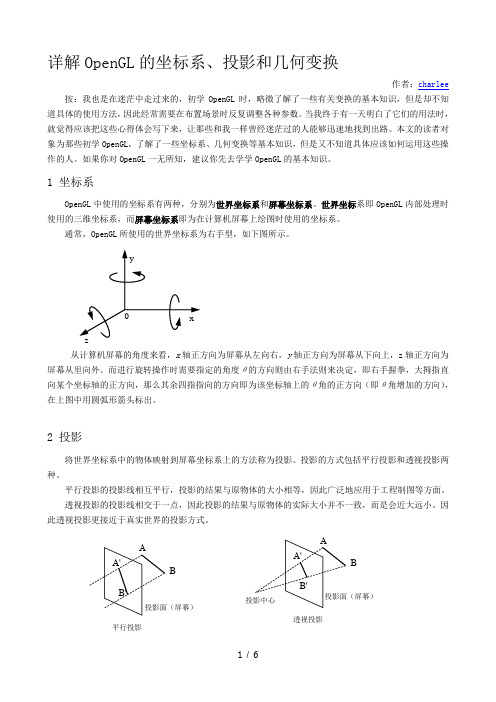
1 坐标系OpenGL中使用的坐标系有两种,分别为世界坐标系和屏幕坐标系。
世界坐标系即OpenGL内部处理时使用的三维坐标系,而屏幕坐标系即为在计算机屏幕上绘图时使用的坐标系。
通常,OpenGL所使用的世界坐标系为右手型,如下图所示。
从计算机屏幕的角度来看,x轴正方向为屏幕从左向右,y轴正方向为屏幕从下向上,z轴正方向为屏幕从里向外。
而进行旋转操作时需要指定的角度θ的方向则由右手法则来决定,即右手握拳,大拇指直向某个坐标轴的正方向,那么其余四指指向的方向即为该坐标轴上的θ角的正方向(即θ角增加的方向),在上图中用圆弧形箭头标出。
2 投影将世界坐标系中的物体映射到屏幕坐标系上的方法称为投影。
投影的方式包括平行投影和透视投影两种。
平行投影的投影线相互平行,投影的结果与原物体的大小相等,因此广泛地应用于工程制图等方面。
透视投影的投影线相交于一点,因此投影的结果与原物体的实际大小并不一致,而是会近大远小。
因此透视投影更接近于真实世界的投影方式。
B 平行投影B透视投影xzy 02.1 平行投影OpenGL 中使用下面的函数来设置投影方式为平行投影。
glOrtho(xleft, xright, ybottom, ytop, znear, zfar); 各参数的含义如下图所示。
注意,只有位于立方体之内的物体才可见。
OpenGL坐标与屏幕坐标的转化
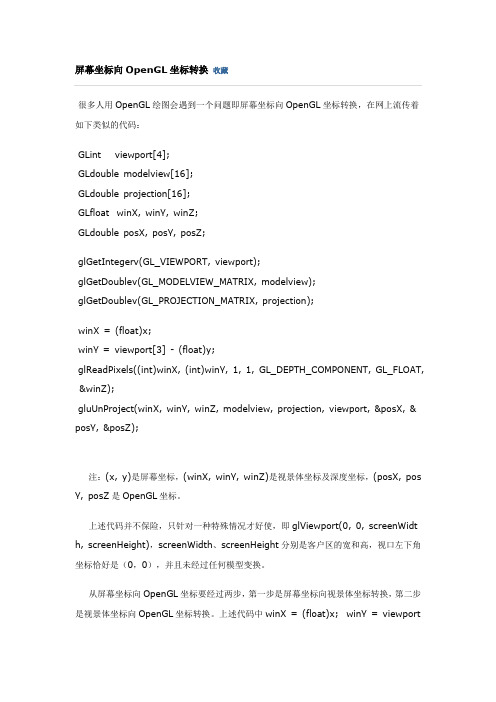
很多人用OpenGL绘图会遇到一个问题即屏幕坐标向OpenGL坐标转换,在网上流传着如下类似的代码:GLint viewport[4];GLdouble modelview[16];GLdouble projection[16];GLfloat winX, winY, winZ;GLdouble posX, posY, posZ;glGetIntegerv(GL_VIEWPORT, viewport);glGetDoublev(GL_MODELVIEW_MATRIX, modelview);glGetDoublev(GL_PROJECTION_MATRIX, projection);winX = (float)x;winY = viewport[3] - (float)y;glReadPixels((int)winX, (int)winY, 1, 1, GL_DEPTH_COMPONENT, GL_FLOAT, &winZ);gluUnProject(winX, winY, winZ, modelview, projection, viewport, &posX, & posY, &posZ);注:(x, y)是屏幕坐标,(winX, winY, winZ)是视景体坐标及深度坐标,(posX, pos Y, posZ是OpenGL坐标。
上述代码并不保险,只针对一种特殊情况才好使,即glViewport(0, 0, screenWidt h, screenHeight),screenWidth、screenHeight分别是客户区的宽和高,视口左下角坐标恰好是(0,0),并且未经过任何模型变换。
从屏幕坐标向OpenGL坐标要经过两步,第一步是屏幕坐标向视景体坐标转换,第二步是视景体坐标向OpenGL坐标转换。
上述代码中winX = (float)x; winY = viewport[3] - (float)y;反映第一步,gluUnProject是第二步。
opencv坐标系和旋转角度定义

在计算机视觉和图像处理领域,OpenCV是一个广泛使用的开源计算机视觉库,它具有丰富的图像处理和计算机视觉算法。
在使用OpenCV进行图像处理时,经常会涉及到坐标系和旋转角度的定义,这些概念对于了解图像处理和计算机视觉算法非常重要。
本文将介绍OpenCV中坐标系和旋转角度的定义,希望对读者有所帮助。
一、坐标系定义在OpenCV中,常用的坐标系是以图像的左上角为原点(0,0),x轴向右为正方向,y轴向下为正方向。
这个坐标系与数学中常用的笛卡尔坐标系有所不同,需注意转换。
1.1 图像坐标系图像坐标系是一个以图像左上角为原点的2D坐标系,其中x轴向右为正方向,y轴向下为正方向。
在OpenCV中,图像的坐标系通常表示为(x,y),x表示列数,y表示行数。
1.2 世界坐标系世界坐标系是一个基于实际世界物体位置的坐标系,通常与相机坐标系相关联。
在使用OpenCV进行摄像机标定和三维重建时,会用到世界坐标系的概念。
二、旋转角度定义在图像处理和计算机视觉中,经常需要对图像进行旋转处理。
在OpenCV中,旋转角度的定义遵循数学中的正角度定义,即逆时针方向为正方向,顺时针方向为负方向。
2.1 顺时针旋转角度在OpenCV中,对图像进行顺时针旋转时,旋转角度为负值。
当需要将图像顺时针旋转90度时,旋转角度为-90度。
2.2 逆时针旋转角度对图像进行逆时针旋转时,旋转角度为正值。
当需要将图像逆时针旋转90度时,旋转角度为90度。
总结:在使用OpenCV进行图像处理和计算机视觉算法开发时,了解坐标系和旋转角度的定义是非常重要的。
本文介绍了OpenCV中常用的图像坐标系和世界坐标系的定义,以及旋转角度的定义。
希望本文对读者在学习和使用OpenCV时有所帮助。
以上就是本文的全部内容,谢谢阅读!在图像处理和计算机视觉中,我们经常会涉及到对图像进行旋转、平移、缩放等操作。
而要进行这些操作,我们首先需要了解图像的坐标系以及旋转角度的定义。
opengl用法

opengl用法OpenGL(Open Graphics Library)是一种用于图形渲染的跨平台编程接口,它提供了一组函数和命令,用于创建和操作2D、3D图形。
OpenGL被广泛应用于计算机图形学、游戏开发、虚拟现实和科学可视化等领域,具有强大的图形处理能力和灵活性。
一、OpenGL的基本概念OpenGL使用一种状态机的方式来管理和调用图形渲染的函数。
在开始使用OpenGL之前,我们需要了解一些基本概念和术语。
1. 坐标系:OpenGL使用右手坐标系,其中x轴向右延伸,y轴向上延伸,z轴指向观察者。
2. 顶点:顶点是构成图形的基本元素,它们包含位置、颜色和纹理坐标等信息。
3. 三角形:OpenGL最基本的图形是三角形。
通过连接三个顶点,可以构成一个平面上的三角形。
4. 缓冲区对象:OpenGL使用缓冲区来存储顶点数据、纹理数据等。
通过绑定缓冲区对象,我们可以将数据发送到显卡中进行处理。
5. 着色器(Shader):着色器是OpenGL中用于将顶点数据转换为屏幕上可见像素的程序。
二、OpenGL的基本用法下面我们将介绍一些常用的OpenGL函数,以帮助你了解如何使用OpenGL进行图形渲染。
1. 初始化OpenGL环境在开始渲染之前,我们首先需要初始化OpenGL环境。
通过调用glutInit函数和glutCreateWindow函数,可以创建一个OpenGL窗口。
2. 设置视口设置视口是指确定OpenGL窗口中要渲染的区域。
通过调用glViewport函数,我们可以指定视口的位置、宽度和高度。
3. 设置投影矩阵投影矩阵用于将三维坐标转换为二维坐标。
通过调用glMatrixMode和glOrtho函数,我们可以设置投影矩阵的类型和具体数值。
4. 绘制图形在设置好渲染环境后,我们可以开始绘制图形。
通过调用glBegin和glEnd函数,我们可以定义一个形状(如三角形或四边形)并填充颜色、添加纹理等。
opengl顶点坐标纹理坐标关系
opengl顶点坐标纹理坐标关系OpenGL是一种图形编程接口,用于创建交互式三维应用程序。
OpenGL依靠一些最基本的图形概念来定义应用程序中的所有对象,其中包括顶点,纹理和坐标。
在OpenGL 中,这些概念之间的关系是一个非常重要的方面,特别是在创建三维模型时。
在OpenGL中,一个模型是由一组顶点定义的。
每个顶点包含三个坐标值:x、y和z。
这些坐标值表示三维空间中的位置。
例如,如果我们想要绘制一个正方体,我们需要定义每个顶点的坐标值。
正方体有六个面,每个面有四个顶点。
因此,我们需要定义顶点的坐标值为(1,1,1)、(-1,1,1)、(-1,-1,1)、(1,-1,1)、(1,1,-1)、(-1,1,-1)、(-1,-1,-1)和(1,-1,-1),这些坐标值确定了正方体的形状和大小。
除了顶点坐标外,纹理坐标也是非常重要的。
纹理是一张平面图像,用于覆盖到对象表面上,使其贴图效果更加真实。
每个像素点对应到一个坐标系中的点,我们称之为纹理坐标。
纹理坐标是介于0和1之间的浮点数,它们控制哪些部分的纹理图像用于哪些部分的模型表面。
在OpenGL中,纹理坐标通过顶点属性向着色器传递,然后用于计算纹理颜色。
顶点和纹理坐标之间的关系是通过OpenGL的纹理映射功能实现的。
纹理映射可将纹理图像映射到模型表面上,使其具有更丰富的视觉效果。
为了实现这一点,我们需要指定每个顶点的纹理坐标,以便在绘制过程中正确应用纹理贴图。
通常,每个顶点具有一个对应的纹理坐标,然后OpenGL会将这些纹理坐标插值成一个平滑的纹理映射区域,以便在绘制过程中创建出更加真实的纹理贴图效果。
在OpenGL中,我们通常使用两组坐标系来表示顶点和纹理坐标之间的关系。
世界坐标系用于定义三维物体的位置和大小,而纹理坐标系用于确定纹理图像的坐标位置。
由于这两个坐标系使用不同的度量单位,所以我们需要进行特殊的映射处理,以便正确地将纹理映射到模型表面上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OpenGL的坐标系、投影和几何变换
按:我也是在迷茫中走过来的,初学OpenGL时,略微了解了一些有关变换的基本知识,但是却不知道具体的使用方法,因此经常需要在布置场景时反复调整各种参数。
当我终于有一天明白了它们的用法时,就觉得应该把这些心得体会写下来,让那些和我一样曾经迷茫过的人能够迅速地找到出路。
本文的读者对象为那些初学OpenGL,了解了一些坐标系、几何变换等基本知识,但是又不知道具体应该如何运用这些操作的人。
如果你对OpenGL一无所知,建议你先去学学OpenGL的基本知识。
1 坐标系
OpenGL中使用的坐标系有两种,分别为世界坐标系和屏幕坐标系。
世界坐标系即OpenGL内部处理时使用的三维坐标系,而屏幕坐标系即为在计算机屏幕上绘图时使用的坐标系。
通常,OpenGL所使用的世界坐标系为右手型,如下图所示。
从计算机屏幕的角度来看,x轴正方向为屏幕从左向右,y轴正方向为屏幕从下向上,z轴正方向为屏幕从里向外。
而进行旋转操作时需要指定的角度θ的方向则由右手法则来决定,即右手握拳,大拇指直向某个坐标轴的正方向,那么其余四指指向的方向即为该坐标轴上的θ角的正方向(即θ角增加的方向),在上图中用圆弧形箭头标出。
2 投影
将世界坐标系中的物体映射到屏幕坐标系上的方法称为投影。
投影的方式包括平行投影和透视投影两种。
平行投影的投影线相互平行,投影的结果与原物体的大小相等,因此广泛地应用于工程制图等方面。
透视投影的投影线相交于一点,因此投影的结果与原物体的实际大小并不一致,而是会近大远小。
因此透视投影更接近于真实世界的投影方式。
B 平行投影
B
透视投影
x
z
y 0
2.1 平行投影
OpenGL 中使用下面的函数来设置投影方式为平行投影。
glOrtho(xleft, xright, ybottom, ytop, znear, zfar); 各参数的含义如下图所示。
注意,只有位于立方体之内的物体才可见。
2.2 透视投影
OpenGL 中使用下面的函数来设置投影方式为透视投影。
gluPerspective(fovy, aspect, znear, zfar); 各参数的含义如下图所示。
fovy 为四棱台的顶角,aspect 为投影面的纵横比,znear 和zfar 为四棱台的顶面和底面到视点的距离(注意不是z 坐标)。
注意,只有位于四棱台之内的物体才可见。
3 几何变换
OpenGL 中可以使用的几何变换有平移、旋转、缩放三种。
glTranslatef(x, y, z);
该函数可以实现平移变换,x 、y 、z 为各坐标轴上的平移量。
glRotatef(θ, x, y, z);
该函数实现旋转变换。
θ为旋转角度,x 、y 、z 为旋转轴。
旋转方向由右手法则决定(参见第一节
“坐
投影面
投影立方体的六个面分别为: 左:z=znear(投影面) 右:z=zfar 上:y=ytop 下:y=ybottom 前:x=xright
后:x=xleft
标系”)。
glScalef(x, y, z);
该函数实现缩放变换。
x 、y 、z 为各轴方向的扩大量。
若为负值,则沿着坐标轴的反方向进行缩放。
实际上,几何变换并不是针对坐标系中的某个物体进行变换,而是对整个坐标系进行变换。
进行绘图时,世界坐标系上的点将以如下的方式被投影到屏幕坐标系上:
⎪⎪⎪⎪
⎪⎭
⎫
⎝⎛∙∙∙=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛11'''12z y x A A A P z y x n 其中(x y z 1)T
为该点在世界坐标系中的坐标,(x' y' z' 1)T
为该点在屏幕坐标系上的投影的坐标。
P 为投影变换矩阵,A n 为几何变换矩阵。
在处理变换和投影时,OpenGL 先把几何变换矩阵A 1、A 2、…、A n
从左侧依次与点坐标矩阵相乘,最后再将投影矩阵从左侧与经过几何变换之后的点坐标相乘,即得到该点的屏幕坐标。
也就是说,在OpenGL 中进行几何变换的方式为,首先通过glTranslatef 、glRotatef 、glScalef 等函数设置好几何变换矩阵(相当于对坐标系进行了变换),然后再进行绘图,那么图形的投影坐标将受到设置好的几何变换矩阵所影响而显现出几何变换的效果;而并不是首先进行绘图然后再通过几何变换函数对已经存在的图形进行变换。
变换的一般形式如下式所示:
⎪⎪⎪⎪⎪⎭
⎫
⎝⎛=⎪⎪⎪⎪
⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛111'''4443
42
41
343332312423222114131211z y x A z y x a a a a a a a a a a a a a a a a z y x 常见的变换矩阵如下。
(1)平移变换
⎪⎪⎪⎪
⎪⎭
⎫
⎝
⎛100
010*******z y x t t t (2)旋转变换 沿x 轴旋转
⎪⎪⎪⎪⎪⎭⎫
⎝
⎛-10000cos sin 00sin cos 000
01
x
x
x x θθ
θθ 沿y 轴旋转
⎪⎪⎪⎪⎪⎭
⎫ ⎝
⎛-10
000cos 0sin 00100sin 0cos y y
y y
θθ
θθ
沿z 轴旋转
⎪⎪⎪⎪⎪⎭
⎫
⎝⎛-10
00010000cos sin 00
sin cos z
z z z θθθθ (3)缩放变换
⎪⎪⎪⎪⎪⎭
⎫ ⎝⎛1000000000000z y x s s s (4)平行投影(投影到xy 平面的情况)
⎪⎪⎪⎪⎪⎭
⎫
⎝
⎛10
0010000100001 (5)透视投影(投影到xy 平面的情况。
投影中心为z 轴上的点(0, 0, R))
⎪⎪
⎪⎪⎪⎪
⎭
⎫
⎝⎛--100
0000000000z R R z R R
在实际编程中,为了保存几何变换和投影变换的操作,OpenGL 维护两个栈,即投影变换栈和几何变换栈。
栈中保存的元素即为投影变换和几何变换的变换矩阵。
使用下面的函数可以在两个栈之间进行切换:
切换当前操作的栈为投影变换栈:glMatrixMode(GL_PROJECTION); 切换当前操作的栈为几何变换栈:glMatrixMode(GL_MODELVIEW);
此外,下面的函数可以清除当前操作的栈中的内容,并向栈中压入一个单位矩阵: glLoadIdentity();
两个栈之间的关系如下图所示:
一般情况下,我们在进行OpenGL 初始化时都要执行下面的命令: glMatrixMode(GL_PROJECTION);
// 切换到投影变换栈
投影变换栈
=⎪⎪⎪⎪⎪⎭
⎫ ⎝⎛1'''z y x ×
几何变换栈
× ⎪⎪⎪
⎪⎪⎭
⎫ ⎝⎛1z y x
glLoadIdentity(); // 初始化投影变换栈
gluPrespective(30.0, aspect, 1.0, 50.0); // 压入透视投影矩阵
glMatrixMode(GL_MODELVIEW); // 切换到几何变换栈
另外,在调用glMatrixMode(GL_MODELVIEW)时,系统会自动将几何变换栈清空并压入单位矩阵,因此不必再调用glLoadIdentity()函数。
对于几何变换栈,还有以下两个常用的操作:
glPushMatrix(); // 保存当前坐标系
glPopMatrix(); // 恢复当前坐标系
在调用几何变换操作时,OpenGL将该几何变换操作的变换矩阵与当前栈的栈顶元素相乘,得到一个新的矩阵并将其作为几何变换栈的栈顶。
作为例子,我们来看下面的这段程序。
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(30.0, aspect, 1.0, 50.0);
glMatrixMode(GL_MODELVIEW);
glPushMatrix();
glTranslatef(0.0, 0.0, -20.0);
glPushMatrix();
glTranslatef(0.0, 1.0, 0.0);
myWireCylinder(1.0, 2.0, 12);
glTranslatef(0.0, 1.0, 0.0);
glRotatef(-90.0, 1.0, 0.0, 0.0);
glutWireCone(1.0, 2.0, 12, 3);
glPopMatrix();
glTranslatef(0.0, -1.0, 0.0);
myWireCylinder(1.0, 2.0, 12);
glPopMatrix();
下面我们来分析一下该程序执行过程中两个栈的变化情况。
图中左侧的栈为透视变换栈,右侧的栈为几何变换栈。
黄色表示当前操作栈。
I表示单位矩阵,P表示投影变换矩阵,T为平移变换矩阵,R为旋转变换矩阵,S为缩放变换矩阵。
4 参考文献
OpenGLによる3次元CGプログラミング,林武文、加藤清敬著,コロナ社。