基于期望模型的变结构交互多模型算法
基于UKF的自适应网格交互式多模型算法
基于UKF的自适应网格交互式多模型算法张园;董受全;刘淑波;初俊博;高松【期刊名称】《指挥控制与仿真》【年(卷),期】2014(000)004【摘要】针对非线性观测条件下的机动目标跟踪问题,基于机动目标的协同转弯( CT)模型,采用无迹卡尔曼滤波( UKF)方法和自适应网格( AG)的模型集自适应策略,研究了一种变结构交互式多模型算法,即基于UKF的自适应网格交互式多模型( UKF-AGIMM)算法。
对二维机动目标跟踪的仿真结果表明,本算法与相应的固定结构交互式多模型算法相比,可以解决固定结构多模型算法存在的问题,有效提高多模型算法的精度和费效比,缩短计算时间,且适合工程应用。
【总页数】5页(P47-50,55)【作者】张园;董受全;刘淑波;初俊博;高松【作者单位】大连海事大学信息与技术学院,辽宁大连 116026; 海军大连舰艇学院,辽宁大连 116018;海军大连舰艇学院,辽宁大连 116018;海军大连舰艇学院,辽宁大连 116018;海军大连舰艇学院,辽宁大连 116018;海军大连舰艇学院,辽宁大连 116018【正文语种】中文【中图分类】E911【相关文献】1.图像增强的自适应网格交互式多模型算法 [J], 陈海;单甘霖;吉兵;张凯2.基于S修正RBUKF的自适应网格交互式多模型算法 [J], 张园;董受全;刘淑波;初俊博3.防发散无迹卡尔曼滤波自适应网格交互式多模型算法 [J], 张园;董受全;钟志通;刘淑波;初俊博4.基于噪声自适应的交互式多模型算法研究 [J], 谷鹏; 颜明; 张世仓5.基于自适应转弯模型的交互式多模型算法研究 [J], 程遥; 吕植勇因版权原因,仅展示原文概要,查看原文内容请购买。
变结构交互式多模型滤波和平滑算法
第45卷 第12期2023年12月系统工程与电子技术SystemsEngineeringandElectronicsVol.45 No.12December2023文章编号:1001 506X(2023)12 4005 08 网址:www.sys ele.com收稿日期:20220920;修回日期:20230312;网络优先出版日期:20230427。
网络优先出版地址:https:∥kns.cnki.net/kcms/detail/11.2422.TN.20230427.1351.010.html 通讯作者.引用格式:陈维义,何凡,刘国强,等.变结构交互式多模型滤波和平滑算法[J].系统工程与电子技术,2023,45(12):4005 4012.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:CHENWY,HEF,LIUGQ,etal.Variablestructureinteractivemultiplemodelfilteringandsmoothingalgorithm[J].SystemsEngineeringandElectronics,2023,45(12):4005 4012.变结构交互式多模型滤波和平滑算法陈维义1,何 凡1, ,刘国强2,毛伟伟2(1.海军工程大学兵器工程学院,湖北武汉430030;2.海军士官学校兵器系,安徽蚌埠233000) 摘 要:针对机动目标跟踪问题,提出了一种变结构交互式多模型滤波和平滑算法。
首先,对多模型滤波和平滑问题进行了简单描述,并给出了前向交互式多模型滤波和后向交互式多模型平滑的数学模型;然后,建立了变结构交互式多模型算法的精确模型,模型子集之间并行独立运行,通过选取概率最高的模型子集的状态估计作为最终的估计结果;最后,对变结构交互式多模型算法的滤波数据进行平滑处理,得到了变结构交互式多模型滤波和平滑算法。
所提算法将前向滤波和后向平滑相结合,提高了目标跟踪精度。
基于交互式多模型强机动目标被动跟踪算法

U F算法 , 目标作强机动时改善了常规 I K 在 MM—U F算法失效状况 , K 并提高 了跟踪精 度。仿 真结果表 明, 法具有较好 的 算
收 敛 速 度和 跟 踪 精 度 。 关键 词 : 动 跟 踪 ; 迹 卡尔 曼 滤 波 器 ; 型转 移 概 率 ; 被 无 模 交互 式 多 模 型
HU Xi ,U Yo g—fn nJ n eg
( col f l t n S h o o E e r i C nrl n ie r g C a g nU ies y X ’ h n i 0 4, hn ) c o c& o t g e n , h n ’ nv r t , i nS a x 7 6 C i oE n i a i a 1 0 a
no — u q out n,t e pa e sr s a c e ub p i lr c rie Ba e in a g rtm sa p o o e n I M — n niue s l i o h p rha e e r h d s o tma e u sv y sa lo ih nd r p s d a M UKF ag rt m t n u e t cin. Th o o e lo ih c n ta k to g ma e v rn a g twhe ca sc l lo h wih ma e v rdee to i e prp s d ag rt m a r c sr n n u e ig tr e n l sia I M lo t msa edia e M ag r h r s bld.Si ain r s lsidiae ta h lo t ha etrc n e g nc pe d,mo e r n i multo e ut n c t h tt e ag r hm sb te o v r e es e i d lta — sto r b bi t n ihe l rng p e ii n iin p o a l y a d h g rf t i r cso . i i e K EYW O RDS: s ie ta kig; Pa sv r c n UKF; de r n iin p o bii I M Mo lta sto r ba lt M y;
自适应转移概率交互式多模型跟踪算法
自适应转移概率交互式多模型跟踪算法许登荣;程水英;包守亮【摘要】针对标准的交互式多模型算法(Interacting Multiple Model,IMM)存在模型集设计困难和采用固定转移概率矩阵导致模型切换缓慢、跟踪精度下降的不足,提出一种自适应转移概率IMM算法.首先,提出了一种新的模型集设计方法,将强跟踪修正输入估计(Strong Tracking Modified Input Estimation,STMIE)模型和匀速运动(Constant Ve-locity,Cv)模型作为IMM算法的模型集,利用STMIE算法对高机动目标的跟踪能力以及CV模型对非机动目标跟踪的高精度,实现对目标的全面自适应跟踪.其次,提出一种依据模型似然函数值对Markov转移概率进行实时修正的方法,增强匹配模型的作用,削弱不匹配模型的影响.仿真结果表明,依据模型似然函数修正转移概率的方法使IMM算法的模型切换速度和跟踪精度都得到提高,提出的IMM-STMIECV算法的跟踪精度高于IMM-CVCA、IMM-CVCACT以及IMM-CVCS算法.%There are two shortcomings in the standard interacting multiple model (IMM) algorithm:one is that designing models is difficult,the other is that the application of constant transition probability matrices makes the model switching speed slow and tracking accuracy decreased.To overcome these shortcomings,an IMM algorithm with adaptive transition probability is proposed.Firstly,a new model-set design method is proposed,and the strong tracking modified input estimation (STMIE) model and constant velocity (CV) model are adopted as the model sets of the IMM algorithm.By using the capability of STMIE model to track high maneuvering targets and the precision of CV model to track non-maneuvering targets,this algorithm can be comprehensively adaptive intarget tracking.Secondly,a new method is proposed to modify the Markov transition probability in real time based on the likelihood values of the models,which enhances the effect of the matching model,and weakens the influence of the mismatched model.Simulation results show that the new method improves model switching speed and tracking precision of IMM algorithm,and the tracking precision of IMM-STM1ECV algorithm is higher than that of IMM-CVCA,IMM-CVCACT and IMM-CVCS algorithms.【期刊名称】《电子学报》【年(卷),期】2017(045)009【总页数】8页(P2113-2120)【关键词】机动目标跟踪;交互式多模型算法;Markov转移概率;修正的输入估计法;强跟踪【作者】许登荣;程水英;包守亮【作者单位】国防科技大学电子对抗学院,安徽合肥230037;国防科技大学电子对抗学院,安徽合肥230037;国防科技大学电子对抗学院,安徽合肥230037【正文语种】中文【中图分类】TN95机动目标跟踪[1~5]是目标跟踪领域的重点和难点问题,相关学者对此问题展开了广泛的研究.最开始采用的是自适应单模型算法对机动目标进行跟踪,然后发展为带机动检测的单模型跟踪算法,紧接着的是多模型算法,并逐渐成为机动目标跟踪的主流方法.多模型算法总结起来可分为三代[6]:自主多模型(AutonomousMultiple Model,AMM)估计、协作式多模型(Cooperating MultipleModel,CMM)估计、变结构多模型(Variable-Structure Multiple Model,VSMM)估计.在所有的多模型算法中,IMM算法通过合理的假设管理,一般被认为是混合系统中有效的混合估计方式,并得到了广泛的应用[7~9].虽然IMM算法被成功地应用,但是IMM算法跟踪性能仍受两个方面的限制.第一,由于IMM采用固定模型集,而现有的目标跟踪算法大多是基于模型的,因而IMM算法跟踪性能的好坏很大程度取决于所选的模型集.模型集的选择存在这样一个困境,即为了提高滤波精度需要尽可能多的增加模型,但是太多的模型除了大大增加计算量之外,反而降低了估计器的性能.第二,IMM算法中的Markov转移概率矩阵决定着输入交互的作用程度,一般根据先验信息人为选取为固定的主对角占优矩阵[10],不能依据后验信息对转移概率进行实时调整,不符合实际情况.当先验信息不确定时,采用固定Markov转移概率矩阵会造成跟踪精度的下降,因此,对Markov转移概率的实时估计一直是国内外研究的一个热点问题[10~13].本文针对IMM算法性能受限的两个方面而展开研究.首先,为了弥补IMM算法在模型集设计方面的不足,提出一种新颖的模型集设计方法.将STMIE算法与IMM算法相结合,把STMIE模型和CV模型作为IMM算法的模型集,利用STMIE算法对高机动目标的跟踪能力以及CV模型对非机动目标跟踪的高精度,实现对目标的全面自适应跟踪;同时针对STMIE算法采取扩维方法估计目标机动加速度导致与CV模型的状态向量维数不一致,采用无偏混合[14]方法.其次,针对采用IMM算法采取固定Markov转移概率矩阵会造成跟踪精度的下降的问题,提出一种简单有效的依据模型似然函数值在线修正转移概率的方法,并给出相应的递推公式.仿真结果校验了本文算法的优越性.2.1 修正的输入估计(Modified Input Estimation,MIE)算法在无先验信息条件下,假设机动目标离散的状态方程和量测方程可表示为:式中:Fk为状态转移矩阵;Gk为输入控制矩阵;Γk为过程噪声分布矩阵;Hk+1为量测矩阵;uk为目标未知的加速度;wk、vk分别为零均值的白色过程噪声和量测噪声序列,协方差矩阵分别为Qk和Rk,且任意时刻的wk与vk不相关.以二维情况为例,假设为k时刻目标的状态向量,zk=[xk yk]T为观测向量,则:其中T为采样间隔,由于Fk、Gk、Γk、Hk+1为时不变矩阵,为方便起见,省略时间下标,下文中简写为F、G、Γ、H.若将未知输入向量uk扩展为状态向量xk的一个新的分量,就可将式(1)的机动目标状态方程转化为非机动的目标状态方程,扩展的状态方程为[4]:量测方程为:zk+1=Hxk+1+vk+1=H(Fxk+Guk+Γwk)+vk+1=[HF HG][xkuk]T+HΓwk+vk+1定义HΓwk+vk+1.则可得扩维后的状态方程和量测方程:由式(6)、(7)即可利用卡尔曼滤波对目标的状态进行递推估计.2.2 强跟踪多重渐消因子在目标高机动或连续机动时,目标的加速度幅度变化大,容易造成滤波器发散.文献[5]结合强跟踪思想对MIE算法进行了改进.即引入强跟踪滤波器时变的多重渐消因子对滤波器的预测协方差矩阵进行调整,进而调节滤波器的增益矩阵.引入多重渐消因子的一步预测协方差矩阵的计算公式为:而可采用如下计算方法:式中:tr为求矩阵迹的算子;αi≥1(i=1,2,…,n)均为预先选定的常数,由先验信息确定;η为弱化因子,可以使状态估计值更加的平滑,通常根据经验选取;为矩阵Mk+1的对角线元素;Vk+1为实际输出残差序列的协方差矩阵,在实际中是未知的,可通过下式进行估算:式中为理论输出的残差序列,0<ρ≤1为遗忘因子,通常取ρ=0.95.2.3 强跟踪输入估计算法滤波步骤由上面的分析可以得到STMIE算法滤波流程如下[4,5]:步骤1 一步预测状态的一步预测:协方差的一步预测为:步骤2 一步更新状态的一步更新协方差的一步更新其中=HΓQk+1ΓTHT+Rk+2由式(19)可知,扩维后滤波器的增益由预测协方差矩阵和共同决定.通常当目标高机动时,滤波器的残差迅速增大,一步预测协方差可以通过多重渐消因子矩阵λk+1而及时调整,进而使滤波增益能得到合理地调整,显著增强了MIE算法对高机动目标的跟踪能力.3.1 IMM-STMIECV算法模型集的设计是多模型估计中最重要的问题之一,传统的IMM算法一般选用CV 模型和匀加速度(Constant Acceleration,CA)模型的组合作为模型集进行混合估计或者选用CV模型、CA模型以及转弯速率未知的协同转弯(Coordinate Turn,CT)模型[15]作为模型集进行混合估计,来实现对目标非机动时的精确跟踪以及目标加速或转弯机动时的跟踪.另外采用相关噪声模型(如当前统计(Current Statistical,CS)模型)和CV模型的组合也比较常见,但当目标高机动时或者连续机动时,往往会因为模型竞争或模型不匹配导致滤波估计精度不理想.STMIE算法在目标多种机动情况下相比其他通用型跟踪算法拥有更高的跟踪精度,但降低了对非机动目标的滤波精度,因而从理论上来说,选用STMIE模型和CV模型的组合的作为IMM算法的模型集就能实现对目标的全面自适应跟踪,并记采用这种模型集设计的IMM算法为IMM-STMIECV算法.但由于二维空间中CV模型的状态维数为4,而STMIE模型扩维后状态向量的维数为6,状态维数不一致,而IMM算法要实现状态和协方差的混合交互,所有状态向量必须转换成一致的状态变量[16].模型状态维数不同以及状态元素不一致时如何实现IMM算法的混合估计在文献[14,16,17]都有所提及,本文采用的是文献[14]提出的无偏混合方法,该算法在混合估计过程中不会带来偏差,且具有更好的一致性.3.2 IMM-STMIECV算法步骤IMM估计算法是递推进行的.每步递推包括4个步骤,即模型条件重初始化、模型条件滤波、模型概率更新、估计融合.现给出IMM-STMIECV算法由k-1时刻到k 时刻的递推步骤.步骤1 模型条件重初始化首先计算混合概率,然后采用2.1节介绍的无偏混合方法进行混合估计,即可得到重初始化的状态和协方差矩阵.步骤2 模型条件滤波由步骤1得到CV模型和STMIE模型估计的初始条件.然后每个模型按如下步骤进行递推其中式(22)~(27)中,上标j表示其中的第j个模型,下同,j∈{1,2,…,M},M为模型总个数,此处M=2.步骤3 模型概率更新=Pr{rk=j|Zk}==式中步骤4 估计融合需要注意的是由于STMIE算法中因此估计的状态向量取决于zk+1,造成了一个采样间隔的延迟;而基于CV模型的滤波器k时刻的状态更新值取决于zk.即模型条件滤波中STMIE模型是利用k+1时刻的量测更新k时刻的状态和协方差,而CV模型是利用k时刻的量测进行状态和协方差更新.因此模型似然函数的计算分别利用了k时刻和k+1时刻的量测,因而实际上对式(28)的模型概率计算进行了近似处理.由于量测值为位置信息,在采样间隔不是太大且目标离传感器较远时,其相对大小改变较小,这种近似是合理的.上述IMM算法中假定系统模型切换过程是一个Markov过程,即模型跳变服从Markov链[7],设Markov概率转移矩阵为则:式中:M为模型的总个数,rk=j表示k时刻系统匹配的模型为j模型表示模型i转移到模型j的概率,且对于任意i∈{1,2,…,M}有标准的IMM算法中Markov转移概率是预先给定的,但是由于目标的机动性和先验信息不确定,这种预先设定的Markov矩阵并不能很好的反应目标真实运动模式的切换,造成估计误差增大[11].因此在滤波过程中需要利用后验信息对IMM算法的转移概率进行自适应修正,使之符合实际情况.文献[10]和文献[13]分别提出利用模型概率变化的后验信息和利用误差压缩率[13]的后验信息对模型转移概率进行修正,而本文提出一种根据模型似然函数值对模型转移概率进行修正的方法.模型似然函数值中包含了当前的量测信息,其大小很好的反应了模型与目标真实运动模式匹配程度.假设k时刻子模型j的模型似然函数值为其值相对其他模型似然函数值越大说明子模型j与目标真实运动状态越匹配,则其他模型向这一匹配模型的转移概率就应越大,反之,其他模型转向这一模型概率就应越小,而本文就是基于这思想对转移概率进行自适应调整.其具体方法为:对Markov概率转移矩阵的元素利用如下方法进行修正,即:式中为调节因子,控制调节的快慢.考虑到k时刻某一模型转向其他模型的概率总和为1,因此需要利用这一性质对式(33)进行修正.即:从式(34)可以看到,若k时刻模型j的模型似然函数值比模型i的大,即子模型j比子模型i与目标真实状态更匹配,通过修正后由模型i转移到模型j的概率也随之增大,因而在下一时刻滤波前的模型交互中,模型似然函数值大的子模型在交互估计输出中所占的比重更大;相反,若k时刻模型j的模型似然函数值比模型i的小,通过修正后由模型i转移到模型j的概率也随之减小,模型似然函数值小的子模型在交互估计输出中所占的比重减小.通过这种利用量测信息实时自适应地修正模型转移概率的方法,增强了匹配模型的作用,压缩了非匹配模型的影响.但是式(34)的转移概率设计仍存在不足,可能导致矩阵主对角元素的某些值越来越大,而某些值会越来越小,即匹配模型转移到自身的概率会越来越大,而不匹配模型转移到自身的概率会越来越小.但当目标机动使得不匹配模型变成匹配模型时,会导致当前匹配模型转移到之前的匹配模型的概率仍很大,转移到自身的概率仍较小,造成模型切换比较缓慢.鉴于此,对式(34)做如下调整,在自适应调整转移概率的同时保持Markov矩阵的主对角占优.对Markov矩阵的主对角线元素设定一个阈值Th,若主对角线元素则对其所在行的元素作如下修改:若则其所在行的元素保持不变.显然,经过修正后仍满足且的要求.同时经过式(34)、(35)修正,模型切换过程中不仅能更多地利用匹配模型的信息,削弱非匹配模型的影响,而且能增强算法的稳定性,使跟踪精度和收敛速度都得到提高.图1为提出的自适应转移概率IMM-STMIECV算法流程图.从两个方面来验证本文提出算法的性能,首先验证本文提出的转移概率自适应算法的性能,然后验证本文提出模型集设计方法性能的好坏.5.1 转移概率自适应修正算法性能分析选择文献[6]中的机动场景3来测试本文提出的自适应转移概率算法的性能,并同时与标准的IMM算法、文献[10]提出的依据模型概率的变化修正转移概率以及文献[13]提出的根据误差压缩率修正转移概率的方法进行对比分析.目标从x0=[8000,600,8000,600](m,m/s,m,m/s)出发,并在开始的20s匀速运动.接下来,目标在21~110s内进行协同转弯运动,转弯速率为1/30(rad/s).在此之后,目标保持匀速直线运动50s直至运动结束.此处目标只有两种运动模式,即匀速运动和协同转弯运动.为了测试这4种算法的性能,同时考虑到需要比较模型切换速度以及模型概率估计,所有算法都采用匹配模型集,即所有IMM算法都采用CV模型和转弯角速度已知( ω= 1/30(rad/s))的CT模型作为IMM算法的模型集.CV、CT模型过程噪声协方差矩阵为QCV=ΓCVdiag(qcv1,qcv2)(ΓCV)T,QCT=ΓCTdiag(qct1,qct2)(ΓCT)T其中:qcv1=qcv2=qct1=qct2=0.01m2·s-4.本文算法的调节因子γ=1/2,Markov概率转移矩阵主对角线元素的阈值Th=0.7.4种算法的初始Markov概率转移矩阵及模型初始概率为:量测为线性量测,即zk=[xk yk]T,量测协方差矩阵为R=diag(1002, 1002),采样间隔T=1s.采用两点初始化[18]的方法,Monte Carlo仿真实验100次.图2为4种方法的均方根误差(RMSE)曲线,图3给出了单次实验中各算法的模型概率变化曲线.仿真结果表明,3种时变转移概率算法的跟踪性相比标准的IMM算法都用不同程度的提升.但相对来说,本文方法拥有更好的跟踪性能,具体表现在:(1)拥有更高的跟踪精度,从图2可以看到,无论是位置均方根误差还是速度均方根,本文方法的稳态误差都是最小的,跟踪精度较标准的IMM算法有大幅度提升,且好于文献[10]和文献[13]方法.(2)模型切换更迅速,收敛速度更快,模型概率估计更加准确.本文方法完成模型切换所用的时间平均只有7s左右,标准的IMM算法和文献[10]方法需要15s左右的时间才能完成模型切换,而文献[13]方法需要30s左右的时间才能实现从一个模型到另一个模型的过渡.在模型概率估计方面,本文方法拥有绝对的优势,远好于其他三种方法,除最开始10s左右滤波器在调整导致模型概率估计不太准确外,其他时间模型概率变化与目标真实的模式的变化十分接近.说明算法增强了匹配模型的作用,削弱了非匹配模型的影响.本文方法的缺陷在于峰值误差(最大误差)较大,尤其是当目标转弯运动变为匀速运动时,误差增大明显.原因在于本文提出的自适应转移概率IMM算法极大的削弱了非匹配模型的作用,但当目标机动非匹配模型变成匹配模型时,模型切换有一定时间的滞后,导致模型切换过程中误差较大.5.2 本文算法模型集设计性能分析上述实验为已知目标真实运动模式的情况下采用匹配模型集验证本文提出的自适应转移概率方法对标准的IMM算法性能的提高.但是现实情况中,目标的机动类型,机动强度以及何时机动都是未知的,因而IMM算法存在模型集设计的难题.但目标可能的运动模式概括起来又是已知的,即主要有匀速运动,匀加速运动,以及转弯运动.因而传统的IMM算法采用CV、CA模型的组合或CV、CA、CT模型的组合实现对机动目标跟踪,利用相关噪声模型与CV模型的组合也比较常见.但是由于目标的机动程度未知,上述几种方法的性能通常不太理想,为此本文提出一种新颖的模型集设计方法,下面对本文提出模型集设计的性能进行验证.选取了包含三种运动模式的目标连续机动的运动场景,用本文提出的IMM-STMIECV算法、IMM-CVCA算法、IMM-CVCACT算法以及IMM-CVCS算法分别对目标进行跟踪,并以均方根误差为性能评价指标.需要指出的是,这里的CT模型是转弯角速度未知的转弯模型,其状态方程是非线性的,利用扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法进行滤波.假设目标初始状态x0=[10000,-160,2000,50](m,m/s,m,m/s),在二维平面内运动120s.分别在0~20s、40~60s、110~120s进行匀速运动,20~40s和60~80s进行匀速转弯运动,80~110s进行匀加速运动,20~40s,60~80s时角速度分别为π/18 (rad/s)和-π/20 (rad/s),80~110s时两个方向的加速度分别为5m/s2,5m/s2.图4为目标运动的真实航迹图.各算法的参数设置如下:CV模型的噪声协方差与4.1节相同,CA模型的过程噪声协方差为QCA=ΓCAdiag(qca1,qca2)(ΓCA)T,CT模型的过程噪声协方差为QCT=ΓCTdiag(qct1,qct2,qct3)(ΓCT)T,式中:qca1=qca2=10m2·s-4;qct1=qct2=0.01m2·s-4,qct3=0.001rad2·s-4;STMIE中wk的方差为预先选定的常数αi=1,弱化因子η=1.同时为了比较的公平性,4种IMM算法都采用本文提出的自适应转移概率方法.IMM-STMIECV、IMM-CVCA、IMM-CVCS的模型初始概率都为[0.5,0.5]T、IMM-CVCACT算法模型初始概率为[1/3,1/3,1/3]T.4中算法的初始Markov概率转移矩阵分别为:自适应转移概率算法的调节因子γ=1/3,Markov概率转移矩阵主对角线元素的阈值Th=0.7.量测为线性量测,即zk=[xk yk]T,量测协方差矩阵为R=diag(1002, 1002),采样间隔T=1s.采用三点初始化[18]方法,Monte Carlo实验200次.图5分别显示的是这四种算法的位置和速度均方根误差曲线,同时对各算法观测时间内平均均方根误差,峰值误差(20s以后)等进行了统计,结果如表1所示.表1统计的结果表明,本文算法的平均位置均方根误差和位置峰值误差都最小,而平均速度均方根误差和速度峰值误差和IMM-CVCACT算法相当,但小于IMM-CVCA算法以及IMM-CVCS算法.从图5可以看到,无论目标在哪种运动模式,本文算法的位置均方根误差几乎都是这几种算法中最小的,而速度均方根误差只有在目标转弯机动时稍大于IMM-CVCACT算法,说明采用STMIE模型和CV模型的组合的IMM算法具有良好的适应性,能实现对目标的全面自适应跟踪,跟踪精度较传统的模型集设计方法得到了显著的提高.而在收敛速度方面,虽然当目标机动时,本文方法的跟踪误差也明显增大,但能迅速收敛,误差保持在一个较小的值,而其他方法收敛速度相对较慢,且目标机动时跟踪精度低.另外,采用STMIE模型和CV模型组合的设计,在量测误差相同但机动性更强的条件下,算法的峰值误差较4.1节得到了改善,原因在于STMIE也能实现对匀速目标的跟踪,而转弯角速度已知的CT模型不能实现对匀速目标的跟踪.综上,本文提出的自适应转移概率IMM-STMIECV算法由于采用新颖的模型集设计同时依据量测信息实时修正转移概率,算法能实现对目标全面的自适应跟踪,无论目标是否机动,相比其他三种算法跟踪精度更高,模型切换迅速,收敛速度快,同时只采用两个跟踪模型,算法复杂度相对较低.算法的跟踪性能较传统方法有较大的提高,是一种性能较为优越的机动目标跟踪算法.本文针对机动目标跟踪问题,在分析标准IMM算法存在的不足的基础上,提出一种自适应转移概率的交互式多模型算法.仿真结果表明采用STMIE模型和CV模型的组合,能提高IMM算法的适应性,无论目标是否机动以及机动程度如何,在无目标任何先验信息的条件下相对其他通用型跟踪算法拥有更高的跟踪精度.采用自适应转移概率算法,能根据量测信息实时对转移概率进行修正,增强匹配模型的作用,削弱非匹配模型的影响,使模型切换更迅速更合理,对模型概率的估计更加准确,收敛速度更快,算法的跟踪精度得到了显著的提高.【相关文献】[1]Xu L,Li X R,Duan Z.Hybrid grid multiple-model estimation with application to maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2016,52(1):122-136.[2]Sithiravel R,Mcdonald M,Balaji B,et al.Multiple model spline probability hypothesis density filter[J].IEEE Transactions on Aerospace and Electronic Systems,2016,52(3):1210-1226.[3]Nemeth C,Fearnhead P,Mihaylova L.Sequential monte carlo methods for state and parameter estimation in abruptly changing environments[J].IEEE Transactions on Signal Processing,2014,62(5):1245-1255.[4]Khaloozadeh H,Karsaz A.Modified input estimation technique for tracking maneuvering targets[J].IET Radar Sonar Navigation,2009,3(1):30-41.[5]杨金龙,姬红兵,樊振华.强跟踪输入估计概率假设密度多机动目标跟踪算法[J].控制理论与应用,2011,28(8):1164-1170.Yang Jin-long,Ji Hong-bing,Fan Zhen-hua.Strong tracking modified input estimation probability hypothesis density for multiple maneuvering targets tracking [J].Journal of Control Theory and Applications,2011,28(8):1164-1170.(in Chinese)[6]Lan J,Li X R,Mu C.Best model augmentation for variable-structure multiple-model estimation[J].Aerospace and Electronic Systems,IEEE Transactions on,2011,47(3):2008-2025.[7]Li W,Jia Y.An information theoretic approach to interacting multiple model estimation[J].IEEE Transactions on Aerospace and Electronic Systems,2015,51(3):1811-1825.[8]刘先省,胡振涛,金勇,等.基于粒子优化的多模型粒子滤波算法[J].电子学报,2010,38(2):301-306. Liu Xian-xing,Hu Zhen-tao,Jin Yong,et al.A novel multiple model particle filter algorithm based on particle optimization[J].Acta Electronica Sinica,2010,38(2):301-306.(in Chinese) [9]万九卿,梁旭,马志峰.基于自适应观测模型交互多模型粒子滤波的红外机动目标跟踪[J].电子学报,2011,39(3):602-608.Wan Jiu-qing,Liang Xu,Ma Zhi-feng.Infrared maneuvering target tracking based on IMM-PF with adaptive observation model[J].Acta Electronica Sinica,2011,39(3):602-608.(in Chinese)[10]郭志,董春云,蔡远利,等.时变转移概率IMM-SRCKF机动目标跟踪算法[J].系统工程与电子技术,2015(1):24-30.Guo Zhi,Dong Chun-yun,Cai Yuan-li,et al.Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking[J].Journal of Systems Engineering and Electronics,2015(1):24-30.(in Chinese)[11]Wang G.ML Estimation of transition probabilities in jump markov systems via convex optimization[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(3):1492-1502.[12]Guo R,Shen M,Huang D,et al.Recursive estimation of transition probabilities for jump Markov linear systems under minimum Kullback-Leibler divergence criterion[J].Iet Control Theory & Applications,2015,9(17):2491-2499.[13]臧荣春,崔平远.马尔可夫参数自适应IFIMM算法研究[J].电子学报,2006,34(3):521-524. Zang Rong-chun,Cui Ping-yuan.Research on adaptive markov parameter IFIMM algorithm[J].Acta Electronica Sinica,2006,34(3):521-524.(in Chinese)[14]Yuan T,Bar-Shalom Y,Willett P,et al.A multiple IMM estimation approach with unbiased mixing for thrusting projectiles[J].IEEE Transactions on Aerospace Electronic Systems,2012,48(4):3250-3267.[15]Zhu L,Cheng X.High manoeuvre target tracking in coordinated turns[J].IET Radar Sonar Navigation,2015,9(8):1078-1087.[16]Blackman S S,Popoli R.Design and Analysis of Modern TrackingSystems[M].Boston:Artech House,1999.224-240.[17]Farrell W.Interacting multiple model filter for tactical ballistic missile tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2008,44(2):418-426.[18]何友,修建娟,关欣,等.雷达数据处理及应用(第三版)[M].北京:电子工业出版社,2013.44-47.。
交互多模型算法在目标跟踪领域的应用
第1 1期
四 川 兵 工 学 报
2 0 1 3年 1 1月
【 信息科学与控S U n - 程】
d o i : 1 0 . 1 1 8 0 9 / s c b g x b 2 0 1 3 . 1 1 . 0 3 5
交 互 多模 型算 法在 目标 跟踪 领 域 的应 用
题。2 0世 纪 9 O年代 B a r —S h a l o m和 B l o m等人在广义伪贝叶 斯算法的基础上 , 提出了一种具有马尔可 夫切换系数 的交互 式多模型 ( I M M) 滤波算法… , 该算法被认为是一种 高效费 比 的算法而 被 广 泛应 用 , 后来 根 据 实 际应 用 , 多 国 学 者 义对 I MM算法进行 了改进 , 比如 A I MM ( 自适应交互多模 型 ) 和
Ab s t r a c t:F o r t h e t a r g e t t r a c k i n g p r o b l e m ,mul t i p l e mo d e l a l g o r i t h m h a s mo r e a d v a n t a g e t ha n s i ng l e mo d e l a l g o r i t hm.The t e x t i n t r o d u c e s t h e o ig r i n a n d de v e l o pme n t o f i n t e r a c t i n g mu l t i pl e mo d e l a l g o it r h m ,s umma — r i z e s mu hi p l e mo d e l a l g o r i t h m i mp r o v e me n t d i r e c t i o n i n r e c e nt y e a r s ,i n t r o d u c e s t h e n e w ie f l d o f mu l t i p l e mo d e l a l g o it r h m ,a n d s t a t e s t h e r e s e a r c h r e s u l t s o f mu l t i — s e n s o r t a r g e t t r a c k i n g .Th e n t h e a u t ho r s umma r i —
变结构交互多模型

变结构交互多模型
为了提高ADS-B航迹跟踪精度,并针对交互多模型算法因所选模型集导致的跟踪性能下降的问题,采用基于平方根容积卡尔曼的变结构交互多模型(VSIMM-SRCKF)算法对航迹进行滤波。
该算法通过建立运动目标跟踪的VSIMM模型集来描述机动目标的系统总模型集合,在滤波过程中,SRCKF递推的更新通过将协方差矩阵开平方得到,使计算复杂度降低,并且使协方差矩阵保持非负定,能够避免滤波中的发散问题。
仿真结果表明,VSIMM-SRCKF算法在估计误差均值、估计误差标准差以及平均绝对百分比误差方面均优于IMM-CKF算法和IMM-SRCKF算法,说明该算法具有更好的跟踪精度,可适应于复杂目标航迹的实时跟踪。
强机动目标自适应变结构多模型跟踪算法

r y L b r t r fF n a n a ce c o t n lDe e s — mmu i ai n I f r to r n miso n u i n T c n l g , Ke a o ao y o u d me t lS in e f rNa i a f n e Co o n c t n o ma i n T a s s in a d F so e h o o y o
u n c s ay itrc mp t in a n e mo esm a b e u et ep ro ma c . o r s l et i p o l m, l a a t e n e e s r e — o ei o mo g t d l n t h y er d c e r n e T e o v s r b e a d p i h f h l v
vr bes u t em lpemo e (V MM) l rh ipeetd U igsv rl dl w i l e e agt ai l t c r ut l d lA S a r u i a oi m rsn . s eea mo e hc r a dt t re g t s e n s het oht moin acri e ur tagt nu eiglvla df rn o ns tea o tm C dut em d l t , cod gt t r n re maev r e, t ieet met h l rh a ajs t o e’ o n ohc e t n e m , gi n h S
适应调 整模型参数建立新 的模型集 合,并对其 进行滤波估计. 真结果显示该方法 能更好的匹配 目标运动规律, 仿 有效降低计算复杂度, 提高跟踪精度 . 关键词:强机动;目标跟踪;自适应 ; 变结构 多模型;交互式多模 型算法
基于OPN的变结构IMM目标跟踪算法仿真设计
第2卷 第9 3 期
文章编号 :0 6— 38 20 ) 9- 0 8— 4 10 9 4 (0 6 0 0 5 0
计
算
机
仿
真
26 月 0 年9 0
基 于 OP 的变 结 构 I N MM 目标 跟 踪 算 法 仿 真 设计
陈康 , 刘静 , 刘翔 , 罗雪 山
ABS RACT : a g tt c i g t e r sa d a c d t e r ,th sb o d a p ia in o t o n mi t r ed a d cvl T T r e r kn h o i n a v n e h o i a ra p l t u l k i l a f l n ii a y y c o o iyi i d W t t e a pi t f mp t rt c n lg a d n w mae a e h oo i icat t e ma e v r efr f l . i h p l ain o o u e e h oo n e t r lt c n lg n ar r f,h n u e i g p ro — e h c o c y i y n m a c f n u e n ag t es b t r n et r T a i o a a k n lo t m rma e v r g tr e sh r d p n e o ma e v r g tr e t et d b t . r dt n lt c i g ag r h f n u e n g t a d t a a t i g ea e i r i o i a i o t ec a g . a e i h i ai n,hs p p rr s a c e n n ls st e b sc i e fv r b e sr cu e it r cie h h n e F c d w t t est t h u o t i a e e e r h sa d a a y e h a i d a o a i l t t r n e a t a u v mu t l d l p t o w r n v r b e sr cu e i tr c ie mu t l d la g r h b s d o d lg o p s i - l p e mo e , u s fr a d a ai l tu t r n ea t l pe mo e lo t m a e n mo e r u w t i a v i i c
基于无味有向图切换的机动目标跟踪VSMM算法
ag rtm e d n u h mo est nu etea c rc . or sleti c nrdcin av ra l s cu emut l— d l lo i h n e se o g d l oe s r c u ay T e ov s o ta ito , aibe t tr lpemo e h h r u i
(n tue f nomain n o t lC l g A tm t n H nz o a z U iesy H nz o 0 C i Is tto l r t dC nr , ol ef uo ai , a gh uDini nvri, a gh u3 , hn i f oa o e o o t 1 1 0 8 a)
sr cu e tu t r ,wh c rn s u n c s ay i trc mp t in a n h mo n f mo es a d c l u ai n b r e h tt e ih b ig n e e s r n e ,o e i o mo g t e a u t o d l n ac l t u d n t a h t o
Ab t a t n t e r g o fma e v rn r e a k n , h a i o a n e a t g m u t l o e l o i m a x d sr c :I h e i n o n u ei g t g tt c i g t e t dt n li tr c i l p em d lag rt h sa f e a r r i n i h i
a g r h b s d o i r p wi h n n n c n e l n fl ri p e e t d Ac o d n ot etr e t n sa eb ss l o i m a e n d g a h s t i ga du s e t d Kama t s r s n e . c r ig t g t t c i e h a mo i t t a i o a i e e t t s h l o i m a th s b mo e—e a e n t e d g a h i lt n r s l h w h t t i t df r n i f me ,t e ag rt h c n mac u - d ls t b s d o h i r p .S mu ai e u t s o t a h s o s a g r h i r v s t e a c r c f t c i g b e u i g t e c mp t in o h mo e s a l a e u ig t e l o i m mp o e h c u a y o r k n y r d c n h o e i o f t e t a t d l s we l s r d cn h c mp tt n b r e o u a i u d n. o Ke r s y wo d :ma e v r g tr e r c i g a ib e s u t r l p e mo e ;d g a h s th n c n e l n f tr n u e i a g tta k n ;v ra l— t cu e mu t l d l i r p wi ;u s e td Kama l ; n r i c i e it r ci g mu t l d l n e a t l p emo e n i
基于EMA算法的变结构交互多模型算法
i ih s se n iemo e—e d p a in i i lme t yjity u izn d l o tro r b b l ya d n whc y tm os d ls ta a t t s mpe n n l tl igmo e se irp o a i t n o b o i p i
t e n w l o i m o n y b o t h ta k n c u a y g e ty, b t a s a e t r s a l r c i g h e a g rt h n t o l o ss t e r c ig a c r c r al u lo h s b te t b e t a k n
空 间相对 于 处理 和计 算 资 源非 常 大 的情况 下 , 以 可 考虑变 结构 多模 型算 法[ ] 5 。
噪声 辨识 、 线性 随 机 系统 的分 段线 性 化 滤波 等 领 非
域 。 互 多 模 型 (MM ) 法 Ea Bo 等 在 广 义 伪 交 I 算 l] lm -是
Q 志 1 : uQ ) (+ ) l ( Q3尼+1 : i ( ) ( ) Q3 志 () 6 () 7
量 测方 程为
Y( ) 忌 : ( ) 是 4 ( ) 忌 z( ) - 是
式 中 , 志 为 k时 刻 目标 状 态 矢 量 ; i惫 为 k z() Y()
ie x c e — o e ug nt to l o ihm ,a ne muli e m o e l o ihm t a i b e s r t r d a ofe pe t d m d la me a i n a g rt w tpl d la g rt wih v ra l — tuc u e,
基于VS-IMM算法的A-SMGCS场面运动目标跟踪
基于VS-IMM算法的A-SMGCS场面运动目标跟踪宫淑丽;陶诚;王帮峰;黄圣国【摘要】为实现先进场面运动引导控制系统中场面监视雷达对运动目标的跟踪,研究了将变结构交互式多模型(Variable structure interacting multiple model,VS-IMM)算法应用到该系统中.首先,根据飞机的真实运动情况建立了飞机的匀速运动、匀加速运动和匀速转弯运动模型;然后,针对固定结构交互式多模型(Fixed structure interactive multiple model,FS-IMM)算法在目标跟踪方面的不足,结合机场地图,将VS-IMM算法应用到机场场面运动目标跟踪中;最后,基于扩展卡尔曼滤波将VS-IMM算法与FS-IMM算法进行仿真比较.结果表明:VS-IMM算法的跟踪精度及模型选择均优于FS-IMM算法,VS-IMM算法在场面跟踪方面具有更大的应用价值.%Aiming at tracking maneuvering target of surface movement radar (SMR) for the advanced surface movement guidance and control system (A-SMGCS), the variable structure interacting multiple model (VS-IMM) algorithm is used in the system. Firstly, according to the real movement of aircraft, a constant velocity motion model is established, as well as a constant acceleration motion model and a constant turn motion model. Then, considering the defects of the fixed structure interacting multiple model (FS-IMM) algorithm, the VS-IMM algorithm is applied to the airport surface movement target tracking by combining with the airport map. Finally, VS-IMM and FS-IMM algorithms are designed by extended Kalman filtering (EKF), and they are compared through computer simulation. Simulation results show that VS-IMM algorithm is more reliable than IMMalgorithm on tracking accuracy. So VS-IMM algorithm has the greater value on surface maneuvering target tracking.【期刊名称】《南京航空航天大学学报》【年(卷),期】2012(044)001【总页数】6页(P118-123)【关键词】目标跟踪;交互式多模型算法;扩展卡尔曼滤波【作者】宫淑丽;陶诚;王帮峰;黄圣国【作者单位】南京航空航天大学民航学院,南京,210016;南京航空航天大学民航学院,南京,210016;南京航空航天大学民航学院,南京,210016;南京航空航天大学民航学院,南京,210016【正文语种】中文【中图分类】V351机场场面监视是保障机场上的航空器和车辆运行安全的基础技术。
一种基于位置误差检测门限的机动目标跟踪算法
A a e v rn r e -r c i g Alo ih M n u e i g Ta g tta k n g rt m
Ba e n t e De e tn r s o d o sto r r s d o h t c i g Th e h l fPo iin Er o
(_ 1海军驻青岛造船厂军事代表 室
珂 晁 爱 民 张 国栋
青岛 2 6 0 ) 2海 军工程大学 601(. 武汉 403) 3 0 3
摘
要
文章针对交 互多模 型算 法 (MM) I 运算 量 大、 型集 设定 偏离 真实 目标 机动 轨迹 等情 况 , 过将 变 结构 交互 多模 型 算法 模 通
(M M ) e me h df rt ev ra l tu t r li l d lVSMM )ag rt m sn e m a e v rd t cigt r s od i p o o e .A I ,an w t o o h a ib esr cu emu tpemo e( lo ih u ig n w n u e ee tn h e h l s r p s d sm uain a o tt et itrn lo ih si tfr r hst e i n h i lto e uts o h tt esa it fma e v rd — i lt b u h wo f e igag rt m spu o wa dbyt i h ssa d t esmu ain rs l h wst a h t bl yo n u e e o l i
理想的 VS MM 算法应该分成两层结构 , 上一层为多模 型集合 序列 , 下一层为模型集合 内的多模型序列 , 整体状态 估 计由下式 给出_ : 6 ]
基于DS-VSMM的声网络低空机动目标跟踪
Dirp wi h V r be Srcue Mut l Mo e DSVS gah S t a al t tr lpe c i u i dl( — MM)agrh i po oe.Frt cut esr ae loi m s rp sd i ,ao sc snos r t s i
mo e sa sg e y d g a h s t h meh d T i , h y tm u p ti f s d b l p e p r l lmo es Co a e d l s i n d b i rp wi t o . h r t e s se o t u s u e y mu t l a a l d l. mp r d i c d i e
Ac u tcNewo k Ba e n DS VS M o si t r s d o . M
GUO Yun f i ZHANG ng, LI Yue s ng -e, Xi N -o
( e a oaoyo F na e tl cec fr ain l ees— o u iain no m t nTas s na d K yL b rtr u d m n ine o t a fneC mm nc t f r ai rnm ̄ i n f aS N o D oI o o
F s nTc n l y Ha g h u a z n v ri , n z o 1 0 8 C ia) u i e h oo , n z o Di i i s y Ha g h u 0 1 , h o g n U e t 3 n
基于期望模式修正的交互式多模型组合导航算法
mod e l pa r a me t e r s of t he i nt e gr a t e d n a vi ga t i on s y s t e m f or a n Aut o no mou s Und e r wa t e r Ve hi c l e (AUV ) i n a t o ug h e nv i r on me nt . The EM A— I M M a l g or i t hm ma i nl y us e s t he p r o b a bi l i t y of mo de l s ob t a i ne d f r o m t h e r e c ur s i ve e s t i ma t e pr o c e s s i n g f o r ma ki n g de c i s i o n.I t f i l t e r s f o r t h e ba s e g r i ds of f i xe d s t r uc — t u r e t o o bt a i n a f i ne d a me nda t o r y mod e l s e t f i r s t l y.The n t he a me n da t o r y mod e l i s f i l t e r e d t o ob t a i n a n
t i o n( EM A ) na me d EM A — I M M a l g or i t h m i s p r o p os e d t o ov e r c o me t h e u nc e r t a i n mo d e l a n d t i me — v a r i e d
I nt e r a c t i ng mu l t i pl e mo d e l i n t e g r a t e d n a v i g a t i o n a l g o r i t h m b a s e d o n e x pe c t e d — mo d e a u g me nt a t i o n f o r AUV
【国家自然科学基金】_弹道目标跟踪_基金支持热词逐年推荐_【万方软件创新助手】_20140802
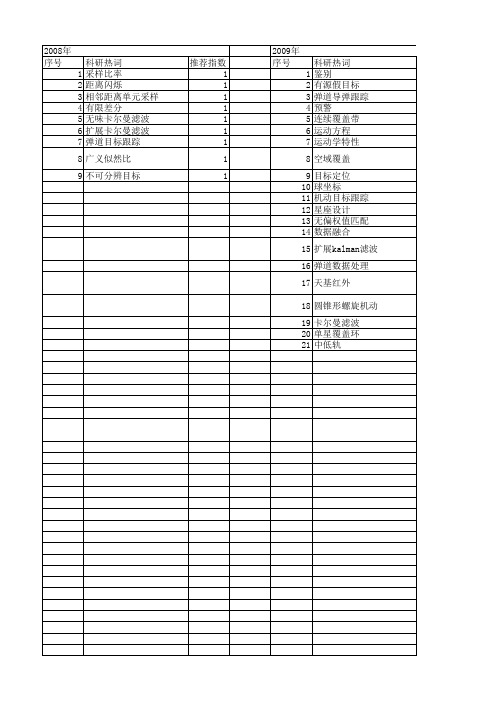
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
科研热词 推荐指数 弹道目标跟踪 2 预测 1 非线性滤波 1 鉴别 1 野值检择 1 递推样条 1 轨道确定 1 跟踪控制 1 设备可见 1 自动控制技术 1 红外传感器 1 求积卡尔曼滤波 1 水雷出水 1 气动伺服弹性 1 有源假目标 1 扩展卡尔曼滤波 1 归一化残差 1 弹道估计 1 弹道仿真 1 弹性振动 1 弹性体导弹 1 天基监视 1 大长径比 1 反馈线性化 1 几何可见 1 光学可见 1 两自由度控制 1 levenberg-marquardt迭代法 1 h∞控制 1 "当前"统计 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
科研热词 推荐指数 机动目标跟踪 2 雷达跟踪 1 脉冲多普勒雷达 1 红外序列图像 1 突防 1 目标弹道轨迹 1 滑翔 1 机动目标跟踪;信标数据处理;无迹卡尔曼滤波 1 无迹卡尔曼滤波 1 扩展卡尔曼滤波 1 当前统计模型 1 再入 1 光学测量 1 信标数据处理 1 unscented kalman filter 1 ostu 1 maneuvering target tracking 1 beaconmode data processing 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
2011年 科研热词 逆系统 运动学分析 累加弦长 空空导弹 滤波 渐近无差跟踪 机动目标跟踪 有限差分 扩展卡尔曼滤波 强跟踪 弹道识别 弹道目标跟踪 弹道目标 实时 半参数建模 动力学系统 推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
自适应网格交互多模型不敏粒子滤波算法

摘 要 : 将一种变结构多模 型算法—— 自适应网格交互多模 型( G MM) AI 算法和不敏粒子 滤波 ( P ) 法相 U F算
结 合 , 出了 自适 应 网 格 交 互 多 模 型 不 敏 粒 子 滤 波 算 法 ( GMMU F 。 该 算 法 通 过 自适 应 网格 实 现 了模 型 自适 应 , 提 AI P) 从 而 以较 小 的 模 型 集 合 覆 盖 了 目标 大 范 围 的 机 动 , 以 此 来 克 服 固 定 结 构 交 互 多 模 型 粒 子 滤 波 ( M F 算 法 存 在 并 1 MP )
,
l tt n o x d s cu eitr cigmut l d lp r ce ftr I i ai ff e t tr nea t lpe mo e at l l ( MMP i o ec me . h n c ne mi o i u r n i i ie F) s v ro d T e u se td
关键 词 : 自适应 网格 ;变结构 多模 型算 法 ;不敏 粒子 滤波 中图分 类号 : T 9 7 N 5 文献标 识 码 : A
文 章 编 号 : 1 7 - 6 9 2 1 ) 8 0 1 ~ 5 d i1 . 4 4 ji n 17 — 6 9 2 1 . 8 0 4 6 2 7 4 ( 0 2 0 ~ 0 8 0 o :0 3 0 /.s . 6 2 7 4 . 0 2 0 . 0 s
基于期望模型的自适应IMM算法

第 l 0期
现 代 雷 达
Mo en Ra a d r d r
Vo . 2 No 0 13 .1 0c .201 t 0
21 0 0年 1 0月
-
信 号/ 据 处 理 ・ 数
中 分 号: 9 文 标志 A 图 类 T5 N3 献 码:
文 编 14 7 9 0 } —0 —5 章 号:0—8 ( 1 1 0 5 0 0 5 20 0 6
关键 词 : 达 数 据 处 理 ; 动 目标 跟 踪 ; 雷 机 自适 应 交 互 式 多模 型 算 法
A d ptv M M g rt m s d o p c e m o l a ieI Al o ih Ba e n Ex e t d・ de
HU A ,E G X nx ,I n —a , I ie g o F N i—iL gyn Q — n Ho Lf
个 状 态 变 量 来 进 行 估 计 , 后 利 用 不 敏 卡 尔 曼 滤 波 然
模 型很难 准确 描述 目标 的实 际运 动状 态 。交 互式 多
t a h e ag r h w s o o sd r b e e gn e n au s i w s s p ro o t e sa d r MM n r g r s o d p i n a d h tt e n w lo t m a f c n i e a l n i e r g v ] e a t a u e r t h tn a d I i i i i e a d fa a t n o
p o a i t sa d l e i o d f n t n fmo e so ti e n t e f t r g h d ls t o l v l et e mo e s i d a c r ig t r b b l i n i l o u c i s o d l b an d i h l i ,t e mo e e u d e ov o b r u t c o d n o ie k h o i en c e
【国家自然科学基金】_哥氏力_基金支持热词逐年推荐_【万方软件创新助手】_20140730
科研热词 频率输出 静止状态 陀螺仪 薄壁梁 翘曲 激光粒子测速仪测量 流量系数 气膜冷却涡轮 气膜冷却 旋转状态 旋转 数值计算 微机电系统 大变形 复合材料 双质量块 双端音叉谐振器 动态特性 冷却效率 三维流场
2012年 序号
科研热词 1 哥氏力 2 剪切型声表面波 3 传播速度
推荐指数 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
科研热词 高超声速飞行器 陀螺效应 陀螺仪 金属点阵 舵偏打 自适应滤波 硅微机械陀螺 目标跟踪 幅频特性 声表面波 增加期望模式 固有频率 变结构交互多模型
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8
2014年 科研热词 运动图像 涡轮叶片 气膜冷却 数值模拟 回转颤振 凹槽状叶顶 倾转旋翼机 传热 推荐指数 1 1 1 1 1 1 1 1
2011年 科研热词 哥氏力 误差分析 误差 球面并联机构 格子boltzmann方法 旋量理论 旋转槽道湍流 摇摆质量陀螺 振梁型角速率传感器 微陀螺 大涡模拟 各向异性湿法腐蚀 压力校正增量投影方法 动力学方程 动力学 动力亚格子应力模型 体微加工 仿真 navier-stokes方程 推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
科研热词 隧道电流检测 陀螺仪 设计 相位差 比较器 模态 微陀螺仪 微陀螺 哥氏效应 压电 加工 共振隧穿效应 ansys仿真
人工智能基础(习题卷5)
人工智能基础(习题卷5)第1部分:单项选择题,共53题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]核心、骨干节点路由设备故障导致主要功能失效达(),定为障碍。
A、1小时;A)4小时;B)24小时;C)48小时。
答案:C解析:2.[单选题]深度学习开始应用在什么时候开始应用在目标检测A)2014年B)2012年C)2013年D)2011年答案:A解析:3.[单选题]主要是基于谓词逻辑,可以作为描述专家系统、数据库、多智能体的知识表示工具的语 言,称为( )A)知识查询操纵语言B)统一建模语言C)知识交换格式语言D)结构化查询语言答案:C解析:4.[单选题]cikit-learn用于模型预测的函数接口为()A)Fit()B)fit()C)predict()D)Predict()答案:C解析:cikit-learn用于模型预测的函数接口为predict()5.[单选题]多分类图像识别任务常采用()作为输出的编码方式。
A)二进制编码B)one-hot编码C)霍夫曼编码D)曼切斯特编码答案:B解析:分类任务一般用独热(。
ne-h。
t)编码表示最终输出,也就是00000010000这样的,码段中1出现的位置就是预测的类别。
6.[单选题]我国在语音语义识别领域的领军企业是( )。
答案:A解析:7.[单选题]自适应综合型是在电压时间型的基础上,增加了( )和来电延时自动选择功能,从而实现参数定值的归一化,满足配电终端不会因网架.运行方式下调整带来的参数调整。
A)故障信息记忆B)合闸确认C)闭锁记忆D)重合闸记忆答案:A解析:8.[单选题]C5.0和QUEST决策树只能处理()目标值的问题。
A)随机型B)连续型C)离散型D)分类型答案:D解析:9.[单选题]在强化学习过程中,()表示随机地采取某个动作,以便于尝试各种结果;()表示采取当前认为最优的动作,以便于进一步优化评估当前认为最优的动作的值。
A)探索;开发B)开发;探索C)探索;输出D)开发;输出答案:A解析:10.[单选题]群智能算法是基于( )对给定的目标寻找最优解的启发式搜索算法。
一类基于模糊推理的具有机动自适应的目标跟踪算法
一类基于模糊推理的具有机动自适应的目标跟踪算法
郝亮;黄颖浩;姚莉秀;蔡云泽
【期刊名称】《上海交通大学学报》
【年(卷),期】2024(58)4
【摘要】针对变结构多模型算法在机动目标跟踪中对目标机动不确定性、量测不确定性自适应能力不足的问题,提出一种基于模糊推理的机动自适应目标跟踪算法.设计一种基于模糊推理的双级机动判别模型,利用模型概率信息和主模型滤波残差加权范数进行主模型可信度和机动判别推理;并将双级机动判别引入基于可能模型集的期望模式扩增方法(EMA-LMS)框架,提出一种模糊推理EMA-LMS算法,实现对模型集自适应的参数和策略的在线调节,从而生成更加接近目标真实运动模式的期望模型,并更好地对模型进行取舍.仿真结果表明,本文算法能够有效增强算法对目标机动和量测不确定的自适应性,提高跟踪精度.
【总页数】13页(P468-480)
【作者】郝亮;黄颖浩;姚莉秀;蔡云泽
【作者单位】上海交通大学自动化系、系统控制与信息处理教育部重点实验室【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于"当前"统计模型的模糊自适应机动目标跟踪算法
2.基于模糊推理的机动目标自适应多模型跟踪算法
3.基于模糊推理的自适应交互多模型目标跟踪算法
4.一种
具有自适应关联门的杂波中机动目标跟踪算法5.机动频率自适应的机动目标模糊跟踪算法
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
结 合 , 到 一 种 变 结 构 交 互 多模 型 算 法 。仿 真 结 果 表 明 , 算 法 对 机 动 目标 的跟 踪 精 度要 优 于 固 定 结 构 的 交 互 多 模 型 算 法 。 得 该 关 键 词 : 动 目标 跟 踪 , 结 构 , 互 多模 型 , 望 系 统 噪声 模 型 机 变 交 期
in v to .Un e h sc n i o n o a in d rt i o d t n。t e mo e e smo ea jc n o t er a to d lo a g t i h d ls ti r da e tt h e 1mo in mo e ftr e .Th e e p ce y t m os d li a j s e a e n mo e r b bl y a d Ma k v ta se rn r b bl y x e t d s se n iemo e s d u td b s d o d lp o a it n r o r n fri g p o a i t . i i
s n ie i n o g r a f e tu t r ,a d i d n i e n d u td a c r i g t h a u e n f os s o ln e i d sr c u e n s ie tf d a d a jse c o dn o t e me s r me to x i
Ab t a t Th d p i em a e v rn a g tt a k n l o ih b s d o x e t d s s e n ie mo e s r c : e a a tv n u e i g t r e r c i g a g rt m a e n e p c e y t m o s d l s i i r v d b s d o h d a o a ib e s r c u e mp o e a e n t e i e fv r a l t u t r .Th d ls tt a o e a t t e v r i g r n e o a g t e mo e e h tf r c s h a y n a g f t r e ’
中 图分 类 号 : P 7 . T 23 2 文献标 识码 : A
I e a t v uli e m o e l o i h a e n nt r c i e M tpl - d lA g r t m b s d o
Ex e t d M o lwih Va i b e S r t r p ce de t r a l t uc u e
p ro ma c fta k n n u e i g t r e . e f r n e o r c i g ma e v rn a g t
Ke r : ne v rng t g tt a ki y wo ds ma u e i ar e r c ng, ra e s r c ur I M , x c e y t m ie mo va ibl t u t e,M e pe t d s s e no s de
,百 l }
基 于期 望 模 型 的变 结构 交 互 多模 型算 法
董桂 旭 , 袁 湛, 瞿 军
( 军航空工程 : 用 变结 构 思 想 , 出一 种基 于 期 望 系 统 噪 声 模 型 的变 结 构交 互 多 模 型 算 法 。算 法 中 , 测 噪 声 变 化 范 围 的 噪声 采 提 预
To t r wih t e I M ,a a ptv M M l ort ge he t h M da i e I a g ihm sf r d.Thr ug h o e Ca l i u a i n,t s i o me o h t e M nt - ro sm l to hi i p ov d l o ihm i s m r e a g rt s upe i t t uni ror o he mpr v d l o ihm a t s a a d M M a g r t o e a g r t nd he t nd r I l o ihm o n
V0 . 3 No 8 1 5。 . Au 2 0 g, 01
火 力 与 指 挥 控 制
FieCo r l& Co r nto mma d Co to n nrl
第 3 5卷 第 8期 21 0 0年 8月
文 章 编 号 : 0 2 0 4 ( 0 0 0 — 1 50 10 —6 0 2 1 )80 2 —4
模 型 集 不 再 采 用 固定 结 构 , 是 根 据 量 测 新 息 在 线 辨 识 和 调 整 , 之 更 加 接 近 于 目标 的 真 实 运 动 模 式 。基 于 模 型 匹 配 概 率 与 而 使
先 验 的 马 尔 科 夫 切 换 概 率 调 整 期 望 系统 噪 声 模 型 噪 声 方 差 , 到 一 个 最 优 的 系统 噪声 模 型 集 。将 该 算 法 与 交 互 多 模 型 算 法 相 得
DONG i u, Gu ~ x YUAN h n, Z a QU u Jn
( a a r n u ia g n e i g I si t , n a 6 0 1 Ch n ) N v l Ae o a tc lEn i e r n n t u e Ya t i2 4 0 , i a t