自动驾驶仪,自动油门,飞行指挥仪
航空航天论文—计算机在航空航天领域的应用

计算机软硬件技术在航空航天领域中的应用王永洲1(西安航空学院计算机学院,陕西西安 710077)摘要:计算机技术的内容非常广泛,可粗分为计算机系统技术、计算机器件技术、计算机部件技术和计算机组装技术等几个方面。
本文结合当今航空制造业的现状,叙述计算机技术在航空制造业的发展状况,并着重对计算机软件技术在航空航天领域中的应用进行分析并且对数字化设计技术,集成技术,数控加工技术,虚拟制造技术等方面进行阐述。
关键字:航空制造;计算机技术;计算机软件;航空航天计算机技术尤其是计算机软件技术在近现代化航空航天发展中的作用中发挥着独特的作用,随着现在信息工程的迅猛发展,航空工业也发生了巨大的变化,与传统的制造技术相比,现代航空制造业具备数字化、无余量、无纸化、集成化、国际化、高精度、高度协同等新特点。
可以说在航空制造业的每一个角落都有计算机的身影,现代信息技术正以其独特的方式推动航空工业的发展。
1 计算机软件技术应用从飞机的设计开始,软件就已经发挥了它重要的作用:1.1 飞机设计飞行器设计需要的软件主要分为绘图、网格划分、流体力学分析、力学分析、多体力学分析、系统控制这几方面。
软件为飞机外形的设计提供了极大的方便,同时,飞机设计时需要的各种复杂的物理、数学方面的计算也必须有软件来完成。
软件的介入,使飞行器的设计更加的方便、准确,减少了不必要的人力物力的耗费,也避免的不必要的了误差、失误。
1.2 飞机零件制造显然,零件图纸的绘制需要绘图软件的辅助,绘图软件既可以减少图纸的误差,有方便了工作人员的操作。
另一方面,大型零件制造机器的控制也需要软件,软件控制的机器更好操作,不需要专门培养大批专业的技术人员,也减少了大型机械对操纵人员人身安全的潜在威胁。
1.3 计算机模拟试飞飞机飞上蓝天之前,一定需要试飞,当今软件技术的发展,使试飞不仅仅是单纯的让一名飞行员驾驶飞机,计算机模拟技术也可以起到试飞的作用,通过抽象的模拟,计算机还可以很好的模拟出飞行时飞机状况,突发事件时飞机的各个系统环境的改变。
ILS自动着陆系统基础知识
中国模拟飞行论坛ILS仪表着陆系统基础知识2012修订版本SINOFSX论坛– CCA08652012/4/25本教材由CCA –0865 授权于中国模拟飞行论坛SINOFSX 教学使用。
未经允许请勿转载,盗版必究!ILS自动着陆系统基础知识————————————————————————————————————航班信息:————————————————————————————————————机型:波音737-800涂装:深圳航空公司时间:北京时间2012年3月19日星期一早8点1刻天气:大雾,能见度500米位置:上海虹桥机场机场编码:ZSSS跑道:36L燃料:50% ————————————————————————————————————飞行计划开始:————————————————————————————————————————————————————————————————————————地面操作设置:————————————————————————————————————切换至2D飞行面板:速度:220节||备注:C-O开关:马赫/节切换||速度保持开关:SPEED||航向:001 ILS频率:110.3起飞前开启飞行指挥仪(FD)高度:2900英尺||高度保持开关(ALTHED)在高度显示器下面||导航保持开关:VORLOC (截获ILS航向道,需设置ILS频率)进场保持开关:APP (在截获下滑道后,开启可自动渐进降落)航向保持:001 ||开关:HDD在其下面||垂直速度保持:|| 上升:+1800 | 下降:-1800 ||释放机翼:10°————————————————————————————————————滑行:————————————————————————————————————1.通过ATC联系请求滑行至跑道2.得到许可后,滑行至起飞跑道并等待起飞讯号————————————————————————————————————起飞:————————————————————————————————————1.复述起飞讯号2.关闭停机刹车3.开启起飞滑行自动刹车:选择RTO位置|| 降落可选用1,2,3或者最大位置||4.推油:先推至40% 并检查各项仪表参数,如没有异常参数问题,推到90%加速起飞5.达到140节轻拉机头保持上升角度为10°仰角6.爬升率平稳后①. 收起落架,②. 150节收机翼到5 ,160节收到2,180节收到1。
【系统】飞控考试题型
【关键字】系统一、飞行控制系统组成及主要系统的作用。
飞行控制系统组成:自动驾驶仪A/P、飞行指引仪FD、安定面配平(STAB/T)、偏航阻尼系统(Y/D)飞行指引仪的作用:1、在自动驾驶仪衔接前,指引仪将飞机实际飞行路线与目标路线比较,计算出进入目标路线所需要的操纵量,为驾驶员提供目视飞行指引指令2、在自动驾驶仪衔接后,监控自动驾驶仪的工作状态。
即(1)提供目视操作指令;(2)监控自动驾驶仪。
偏航阻尼系统作用:(1)阻尼飞机“荷兰滚”运动;(2)协调转弯。
安定面配平(STAB/T)的作用:(1)产生附加力矩,以保持纵向力矩的平衡。
卸掉由于升降舵偏转产生的铰链力矩(间接),使升降舵回到相对零位,驾驶杆力也为零。
(2)解决自动驾驶仪的衔接与断开过程中引起飞机的剧烈运动。
分为M/T、SPD/T、AP/T、人工电气配平、备用电气配平。
AP/T:驾驶仪接通后,保持姿态的稳定。
自动配平系统是在自动驾驶衔接后工作。
SPD/T:(适用于起飞、复飞阶段):提供纵向平衡力矩,保证速度的稳定。
在飞机起飞和复飞过程中减小因速度变化引起的不稳定,是根据计算空速的变化对安定面进行配平。
在起飞、复飞阶段,速度配平系统提供在低速大推力条件下的速度稳定。
即当空速增加时使飞机抬头配平,当空速减小时使飞机低头配平。
速度配平是在飞机起飞20秒后,并且人工配平和自动配平都没有衔接的情况下开始衔接。
一旦人工配平或自动配平衔接则速度配平就脱开。
M/T(范围一般在0.6-0.9,高速巡航阶段):当马赫数接近临界值时,飞机因焦点后移而引起下俯力矩,此时,自动控制升降舵(或安定面)的偏转来进行补偿,使飞机不再出现速度不稳定的现象,飞机的操纵也符合正常规律。
作用是提供纵向平衡力矩,保证速度的稳定性,防止“反操纵”。
马赫配平系统是为了防止飞机马赫数增加时产生的俯冲。
人工电气配平:由飞行员操纵配平电门输入配平指令给配平计算机。
备用电气配平:当人工电气配平失效时应急使用偏航阻尼系统:主要功用是由偏航阻尼器通过计算,输出方向舵偏转信号来控制方向舵的偏转来抑制荷兰滚,稳定飞机的航向,并对飞机的转弯起协调作用。
智能飞行汽车关键技术及发展趋势

智能飞行汽车关键技术及发展趋势目录一、内容描述 (1)二、智能飞行汽车概述 (2)1. 飞行汽车的起源与发展 (3)2. 智能飞行汽车的定义与特点 (4)三、智能飞行汽车的关键技术 (5)1. 飞行控制技术 (7)2. 能源动力技术 (8)3. 导航与通信技术 (9)4. 安全防护技术 (10)5. 系统集成与优化技术 (11)四、智能飞行汽车的发展趋势 (13)1. 技术创新与突破 (13)2. 市场需求与规模预测 (15)3. 政策法规与标准制定 (16)4. 跨界合作与产业生态构建 (17)五、结论与展望 (18)一、内容描述智能飞行汽车作为一种融合了现代科技与传统交通工具的新型交通工具,其关键技术及发展趋势日益受到全球关注。
本文档将就智能飞行汽车的关键技术及其未来发展趋势进行深入探讨。
智能飞行汽车的核心技术主要包括自动驾驶技术、航空航天技术、智能化控制技术和车辆制造技术。
不同气候条件下稳定运行;而车辆制造技术则是实现这些技术的基础平台。
关于智能飞行汽车的发展趋势,随着科技的进步和智能化水平的不断提高,我们可以预见以下几个方向:一是智能化程度的提升,如更高精度的导航、自主决策能力更强;二是能源问题的解决,特别是飞行汽车所采用的电力能源及相应的续航能力将会获得更大的提升;三是无人驾驶技术商业化趋势加快,使得智能飞行汽车能够逐渐走向大众市场;四是智能网联技术的融合应用,实现与交通基础设施、城市智能管理等系统的互联互通。
这些趋势将共同推动智能飞行汽车从理论走向实践,最终实现广泛应用和普及。
“智能飞行汽车关键技术及发展趋势”涉及广泛领域的知识,旨在深入研究和发展具有颠覆性意义的现代交通技术。
对此进行深入了解与研究有助于更好地把握科技趋势和行业未来发展动态。
二、智能飞行汽车概述随着科技的飞速发展,交通出行方式也在不断地变革与创新。
在这个变革的浪潮中,智能飞行汽车作为新能源汽车领域的一种新兴业态,正逐渐崭露头角,为人们的出行带来了全新的可能性和想象空间。
自动驾驶仪,自动油门,飞行指挥仪
自动驾驶仪,自动油门,飞行指挥仪*** Intended For Flight Simulation Use ONLY * 仅供飞行模拟使用 * 本文中所有术语的翻译,均以英文原文为准。
***什么是自动驾驶系统?自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。
不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。
自动驾驶系统能做些什么?装备的自动驾驶仪具有以下功能:在FS2004里,Cessna 和Beechcraft Baron 58• 保持机翼水平,不发生滚转。
• 保持飞机当前的仰俯角。
• 保持选定的飞行方向。
• 保持选定的飞行高度。
• 保持选定的上升率或下降率。
• 跟踪一个VOR电波射线(Radial)。
)。
• 跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)的定位信标和下滑道指示信标(Glide • 跟踪仪器降落系统(Instrument Landing SystemSlope)。
• 跟踪一个GPS航路。
GPS 不支持垂直方向制导的自动导航。
和所有的Boeing 喷气机,都在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45,装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。
这套系增加了以下功能:• 保持一个选定的飞行速度(空速或地速)。
• 消除有害的偏航。
• 帮助飞行员正确的手动控制飞机。
在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能:)• 飞行管理计算机(Flight Management Computers)• 垂直方向导航(Vertical Navigation)• 横向导航(Lateral Navigation)• 飞行水平改变(Flight Level Change)• 机轮控制(Control Wheel Steering• 自动降落(Autoland)为什么要使用自动驾驶仪?有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使)的用自动驾驶仪可以减小飞行员工作量,特别是在仪器飞行规则(Instrument Flight Rules 时候。
自动驾驶仪

自动驾驶仪一、自动驾驶仪的组成为了弄清自动驾驶仪的组成以及它是如何来代替驾驶员的问题。
我们先来看看驾驶员是如何操纵飞机的。
如果要求飞机作水平直线飞行,飞机必须有一起始的俯仰角(等于平飞时的迎角)来产生一定的升力与飞机的重力平衡.同时升降舵应向上偏转一定角度产生一定的操纵力矩与飞机的稳定力矩平衡.此时陀螺地平仪的指示小飞机应水平线位置,表明飞机作水平直线飞行.若某种干扰使飞机偏离起始姿态(如抬头△角),这时驾驶员从地平仪观察到此变化,于是他的大脑作出决定,前推驾驶杆,使升降舵下偏一个角,产生一低头力矩从而使飞机趋于水平驾驶员从地平仪中看到此变化,于是把驾驶杆逐渐回收到原来的平衡位置,升降舵也回到位置,这时飞机又作水平下线飞行.上述驾驶过程可用图8.20来表示。
由图可知,驾驶员与飞机组成了一个闭环系统,图中虚线框表示驾驶员。
若用自动驾驶仪来代替驾驶员上述驾驶过程的话,那么驾驶仪必须满足如下条件:1.它应能知道飞机偏离预定姿态角的情况,并按偏离方向,使舵面作相应的偏转.2.舵面偏转的大小与飞机偏离的大小应成一定的比例关系.即机头偏离大时,舵偏角也应大。
因此自动驾驶仪也应具有代替驾驶员眼、神经与肌肉、手或脚的一些装置.如起眼睛作用的敏感元件,起神经与肌肉作用的变换放大元件与起手起脚作用的执行元件。
如图8.21所示.由图可知,自动驾驶仪主要由敏感元件、变换放大元件与执行元件三大部分组成.1.敏感元件:有时也称为传感器,它是用来感受或测量飞机的姿态及飞行参数,并输出相应电信号的一些装置。
如测量飞机俯仰、倾斜与航向姿态的垂直陀螺仪放4量飞机绕机体轴转动角速度的速率陀螺仪此外还有大气数据传感器、高度差传感器与加速度计等敏感元件。
2.变换放大元件:从敏感元件输出的电信号一般都是很微弱的,为了使执行元件能够工作,并按一定规律工作,必须将信号加以放大与变换,使得足以推动执行元件,并按一定规律动作。
最常用的变换放大元件有电子放大器、磁放大器与液压放大器等。
航空装备SNS系统编码表
-70
-80
增升装置
28
燃油
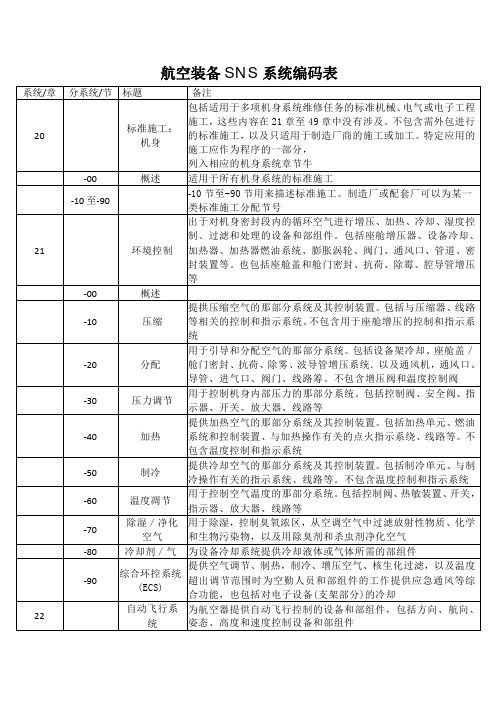
-00
概述 用于储存燃油的那部分系统。包括油箱密封、软油箱舱、通气 系统、油泵导油装置,单元油箱之间的连通件、机翼上的加油 口和口盖等,也包括蓄油器供油增压系统和不属于分配系统的 油箱内蓄油器 用于从加油接头向储存系统分配燃油,以及从储存系统将燃油
-10
储存
-20
分配
输送到动力装置燃油快卸接头的那部分系统。包括管路、泵、 阀门、控机构等 用于在飞行时将燃油排放到机外的那部分系统。包括管路、阀 门、控制机构,放油槽等 用于指示燃油油量、温度和压力的那部分系统。包括油箱内燃 油增压压力警告系统。不包括发动机燃油流量和压力
附加舱
-60 -70 -80 26 -00 -10 -20 -30
应急设备
备注 指容纳旅客或工作人员舱室,包括不是更衣室的休息室。主要 有座椅、操纵台、设备架、卧铺、上部行李架、帘子、壁挂、 地毯、杂志架、屏风、壁挂式温度计,备用的电灯泡、保险丝 等 储存和准备饮食的区域。包括活动的和固定的橱柜,烤箱,冰 箱、垃圾箱、餐具架、咖啡机和分装器、器皿、电插座、线路 等 指包含洗手盆、梳妆台和抽水马桶的盥洗室和更衣室区域。包 括镜子,座椅,橱柜、分配装置,电插座等。有关洗手盆和抽 水马桶的内容在 38 章中 乘客和/或空勤人员使用的附加舱室。包括空勤休息舱,睡眠 舱等 在应急程序中需要使用的设备。包括撤离设备,救生艇,救生 衣,事故地点发射机,水下定位装置、急救包、恒温箱、氧气 袋,医疗担架、着陆照明弹和信号弹、减速伞、撤离信号系统 等。不包含灭火器、氧气设备或面罩 用于隔热和隔音的隔离层。包括驾驶舱、客舱以及附加的隔离 层等 探测和指示火灾或烟雾,以及储存灭火剂并将其输送到飞机所 有受保护区域的固定式和便携式设备和部组件,包括灭火瓶、 阀门、管路等 用于感知和指示过热,烟雾或火灾的那部分系统 用于灭火的固定式或便携式装置 用于感知、指示和防止火焰蔓延到燃油系统而引起爆炸的那部 分系统 用于控制飞机飞行姿态特性的设备和部组件。包括主飞行操纵 面和辅助飞行操纵面,以及增升系统的功能及维护信息,但不 包含在结构章节中说明的操纵面的结构维护信息。包括驾驶杆 手柄、方向舵脚蹬、变速箱,操纵杆及钢索,连杆、液压阀、 作动筒、控制部件、控制与显示装置、计算机、变换器,变压 器、传感器部件、显示器、陀螺仪,加速度计、伺服系统,警 告系统以及控制锁定装置等。包括旋翼飞机的旋翼操纵内容 飞机横滚操纵设备和部组件。包括驾驶盘 (杆 )、钢索、助力器, 连杆,操纵面、指示器等 飞机航向控制设备和部组件。包括方向舵脚蹬、调整片操纵轮, 钢索、助力器、连杆、操纵面、位置指示器等
第4章 自动驾驶-飞行指引仪

➢ 自动驾驶仪常见的衔接形式
1 驾驶盘操作 ( CWS:control wheel
steer-ing 作用原理 驾驶盘将驾驶员的操作量作为 输入指令,被转换为电信号后,送到自动驾驶仪 的核心计算机---FCC,FCC再输出信号给液压作 动器,带动舵面运动。
自动驾驶仪仅起到助力器的作用,相当于电 传操纵飞机上的人工操作。
2 指令( command, CMD)方式
作用原理 当自动驾驶仪以CMD方式衔接 时,其纵向通道和横侧向通道分别以不同的方 式来工作。FCC会根据其纵向方式和横侧向方 式来自动计算输出指令,然后通过液压作动器 控制飞机的相应操纵舵面,实现飞机的自动控 制。
➢ 自动驾驶仪常见的工作方式
纵向通道 常见的工作方式有: 高度保持方式(ALTITU HOLD)、升降速度方式( 或称垂直速度,V/S)、高度层改变方式(LEVEL CHANGE)、高度截获或高度获得方式(ALTITU )、垂直导航方式(VNAV)、下滑道方式 (G/S)、复飞方式(GO AROUND)等。
(2)自动驾驶计算机
➢ 接收自动驾驶仪操纵飞机的各种信号,经过计 算机处理后,将信号送给放大器。
➢现在为数字式飞行控制计算机。
(3)放大器 放大器接收自动驾驶计算机送来的微小信号, 经放大后,将信号送至舵机。
(4)舵机
舵机是自动驾驶仪操纵飞机舵面的执行机构 自动驾驶仪的舵机有电动舵机和液压式舵机两 种。
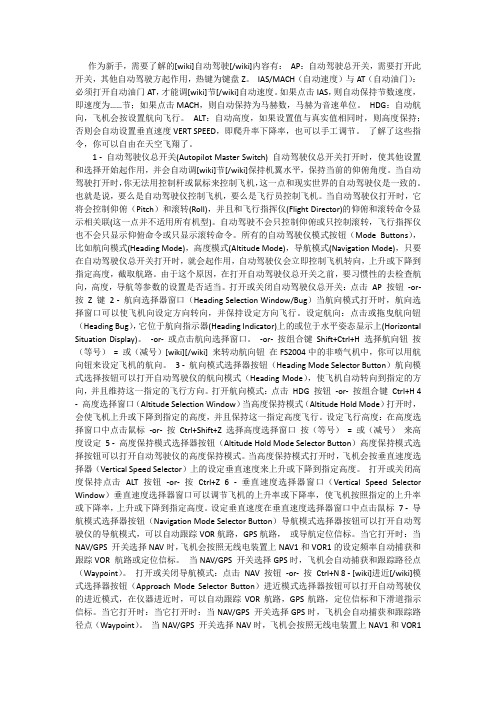
1 单通道自动驾驶仪 组成:测量装置、计算装置、放大装置、舵 机、回输装置和控制显示装置等。
测量装置
测量装置
自动驾驶 计算机
放大器
舵机
控制显示 装置
回输装置
飞机
自动驾驶仪单通道组成方块图
☆YS-X6多轴自动驾驶仪说明书3
28
29
30
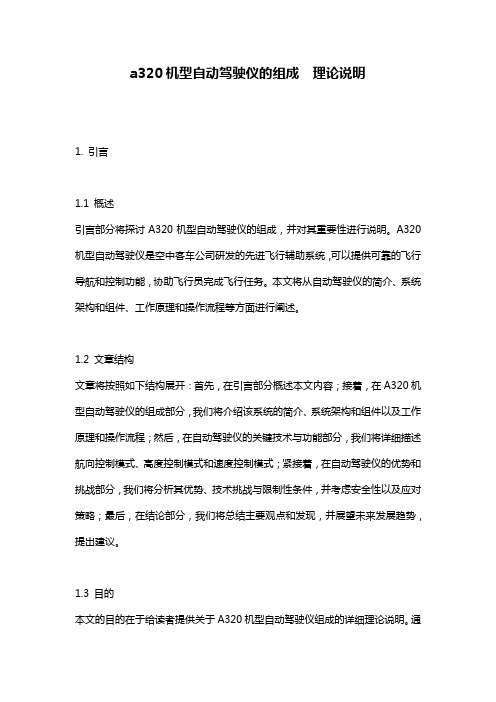
1.G P S 模 块 插 头 (黑) 2.G P S 模 块 插 头 (红) 3.照 相 4.云 台 俯 仰 5.云 台 横 滚 6.电 机 8 7.电 机 7 8.电 机 6 9.电 机 5 1 0 .电 机 4 1 1 .电 机 3 1 2 .电 机 2 1 3 .电 机 1 1 4 .I M U 模 块 插 头 (黑) 1 5 .I M U 模 块 插 头 (红)
16 .C H 1 17 .C H 2 18 .C H 3 19 ,C H 4 20 .C H 5 21 .C H 6 22 .C H 7 (复 用 S B U S) 23 .C H 8 24 .接P C (升 级 固 件 ) 25 .不 接 26 .w i f i模 块 输 出 27 .动 力 电 压 采 集 (4S以 上 ) 28 .电 流 传 感 器 29 .L E D 灯 30 .电 源
3
安全说明
出于安全考虑,请您务必关注以下事项。 1 、务必在完成所有调试、检查后安装螺旋桨! 2、 安装IMU必须正面向上。 (有“IMU”字样为正面)。箭头指向为机头方向。 3、 开机顺序:先遥控器后飞控;关机顺序:先飞控后遥控器。 在使用S-BUS自适应功能情况下尤其关注! 4、 油门校准、手控舵位、实际舵位、通道设置必须正确无误。 5、 GPS+COMPASS为磁性敏感模块,应远离其它电子设备。安装时箭头指向为机头方向。 6、 飞行前请先设置遥控器FS功能。 7、 当GPS信号不良,如:GPS星数少于7颗(有红灯闪烁)或GPS地面静止GPS速度大于15CM。 不要使用GPS模式飞行。 8、 云台舵机供电为任一电调的电压输出。 当电调无BEC输出时,请您附加电源切勿通过飞 控。 9、 在自动返航过程中 , 遥控器0-10%的油门舵、 十字操作界面的最底端 (地面站软件的 “遥 控”下)为关闭电机。在其它模式下上述2种操作均不会关闭电机。 10、低电压保护非娱乐方式,请掌握好您的飞行时间,尽量避免使用低电压保护。 11、震动系数超限情况下切勿飞行。 12、校准磁场后必须检查航向角、磁场数据是否正确。 13、起飞前必须检查姿态角、静态角是否一致。 14、GPS+COMPASS、IMU 与 MC 的连接,需要注意插头颜色与丝印文字颜色保持一致。错误安 装可能造成设备短路。 15、系统电源防反插设计不是娱乐工具,请勿尝试。 16、在某些强磁场环境中,出现了航向角与实际转动角度不一致情况下,切勿 GPS 模式飞行 或在强磁场环境中再次校准磁场。 17、开接收机为系统默认状态。 关闭接收机为全自动飞行。开接收机时需要注意遥控器状 态。
国内外比较好的几款飞控系统介绍和性能配置
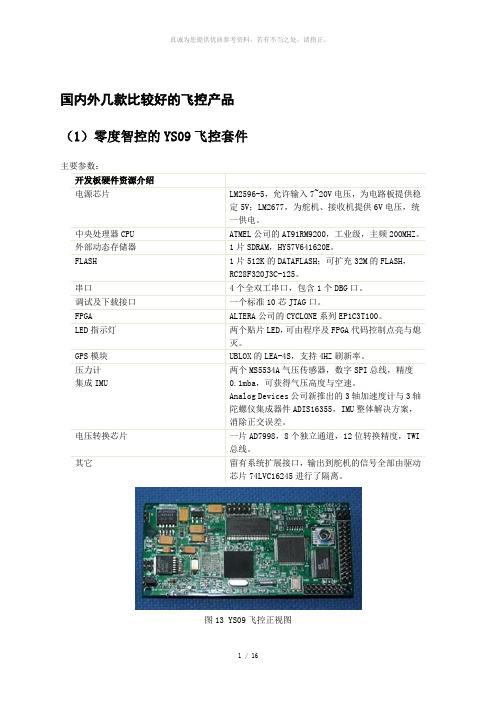
国内外几款比较好的飞控产品(1)零度智控的YS09飞控套件主要参数:开发板硬件资源介绍电源芯片LM2596-5,允许输入7~20V电压,为电路板提供稳定5V;LM2677,为舵机、接收机提供6V电压,统一供电。
中央处理器CPU ATMEL公司的AT91RM9200,工业级,主频200MHZ。
外部动态存储器1片SDRAM,HY57V641620E。
FLASH 1片512K的DATAFLASH;可扩充32M的FLASH,RC28F320J3C-125。
串口4个全双工串口,包含1个DBG口。
调试及下载接口一个标准10芯JTAG口。
FPGA ALTERA公司的CYCLONE系列EP1C3T100。
LED指示灯两个贴片LED,可由程序及FPGA代码控制点亮与熄灭。
GPS模块UBLOX的LEA-4S,支持4HZ刷新率。
压力计集成IMU 两个MS5534A气压传感器,数字SPI总线,精度0.1mba,可获得气压高度与空速。
Analog Devices公司新推出的3轴加速度计与3轴陀螺仪集成器件ADIS16355,IMU整体解决方案,消除正交误差。
电压转换芯片一片AD7998,8个独立通道,12位转换精度,TWI总线。
其它留有系统扩展接口,输出到舵机的信号全部由驱动芯片74LVC16245进行了隔离。
图13 YS09飞控正视图图14 YS09飞控后视图(2)北京普洛特无人飞行器科技有限公司的UP30/40飞控系统UP30性能参数:集成3轴MEMS加速度计、速率陀螺,GPS,空速传感器,及更高精度的全数字气压高度计供电范围扩展为4~26V,很多电动飞机的动力电可以直接给其供电体积相对UP20更小巧,仅为40X100X12mm3,重量26g外部接口和任务功能灵活且可以定制可内置3轴电子罗盘,支持3轴云台控制具备GPS/INS惯性导航功能,满足在丢星情况下返回起飞点舵机扩展到10~24个,分别可以执行飞行控制和其他任务支持国产低速通讯电台(最低波特率至1200bps),使得通讯距离更远、更可靠、误码率更低 2~6个10位AD,1路16位AD,充分满足任务数据采集需求大气数据探测能力,可以观测大气温压湿,以及风向风速具备UP20所具备的定时定距以及定点的航拍功能具备2路转速监测,特别适合于双发动机的无人机、无人飞艇的转速监测新的电气停车功能支持除了原来的磁电机发动机(如小松系列),还支持CDI点火的发动机(如3w等)支持全自动伞降;可连接超声波高度传感器实现全自动的滑跑降落,只需要在地面站上指定降落点与方向以及左右盘旋,飞控自动推算下滑航线。
a320机型自动驾驶仪的组成__理论说明
a320机型自动驾驶仪的组成理论说明1. 引言1.1 概述引言部分将探讨A320机型自动驾驶仪的组成,并对其重要性进行说明。
A320机型自动驾驶仪是空中客车公司研发的先进飞行辅助系统,可以提供可靠的飞行导航和控制功能,协助飞行员完成飞行任务。
本文将从自动驾驶仪的简介、系统架构和组件、工作原理和操作流程等方面进行阐述。
1.2 文章结构文章将按照如下结构展开:首先,在引言部分概述本文内容;接着,在A320机型自动驾驶仪的组成部分,我们将介绍该系统的简介、系统架构和组件以及工作原理和操作流程;然后,在自动驾驶仪的关键技术与功能部分,我们将详细描述航向控制模式、高度控制模式和速度控制模式;紧接着,在自动驾驶仪的优势和挑战部分,我们将分析其优势、技术挑战与限制性条件,并考虑安全性以及应对策略;最后,在结论部分,我们将总结主要观点和发现,并展望未来发展趋势,提出建议。
1.3 目的本文的目的在于给读者提供关于A320机型自动驾驶仪组成的详细理论说明。
通过深入剖析自动驾驶仪的工作原理和操作流程,以及它在航向、高度和速度控制方面的功能,读者将对该技术有更全面、深入的了解。
同时,我们还将分析自动驾驶仪所面临的挑战,并提供相应的安全性考虑与应对策略。
通过本文,读者将加深对A320机型自动驾驶仪系统组成及其应用范围的认识,并为未来发展趋势提出建议。
2. A320机型自动驾驶仪的组成2.1 自动驾驶仪简介A320机型的自动驾驶仪是一种先进的飞行控制系统,通过自动化技术实现对飞机的自主导航和操纵。
它包括多个关键组件和系统,可以在飞行过程中实现航向控制、高度控制和速度控制等功能。
2.2 系统架构和组件A320机型的自动驾驶仪由多个子系统和组件组成,包括导航系统、传感器系统、计算系统和执行系统等。
导航系统负责获取飞行数据并进行导航计算,传感器系统用于采集环境信息并提供给计算系统进行处理,计算系统则负责对获取的数据进行处理与分析,并生成相应的控制指令,最后由执行系统将指令传达给飞行操纵面来实现操纵。
飞行控制面板

飞行扫盲,认识现代客机仪表和飞行控制面板篇本帖最后由luoruo 于2009-11-11 10:20 AM 编辑要开飞机就需要能够读懂飞机的仪表,所幸的是现代客机大都提供了2个以上的多功能仪表他们大都显示易懂和集中信息,让我们可以扫一眼就可以知道现在飞机大体飞行状况•当然那些传统仪表的认识和读数好多地方都可以找到资料我们这里就不提了多功能飞行仪表:下面我以默认737-800为主例讲解,有与其他机型的区别我会顺带提起.-A上图中各仪表的名称1•多功能飞行姿态面板言- *这里个是一个显示信息比较全面的PFD面板红色框框里面显示的是自动驾驶信息,左边SPD代表速度保持,中间HDG代表航向保持, 右边ALT代表高度保持,显示这三个信息的时候代表飞机是按照MCP面板的设置的SPD,HDG,ALT信息自动驾驶的。
如果是采用比如说FMC或者GPS之类或者进近过程中的盲降系统来自动驾驶的话这些信息都会变化,具体等到我们以后讲解插件机的时候再来讲述。
•两侧的黄色框框,左边代表的是自动驾驶预设置速度,图上信息是200节;右边是代表自动驾驶预设置高度这里是3000ft。
(注意它是欲设置值就是飞机自动驾驶将要达到的数值,并非当前飞机状态读数)两个黄色框框下面的长条,左边那个代表速度,右边代表高度。
他们的框框里面的数字,才是真正当前飞机状态的读数。
对应框框旁边的那个粉红色的标记是用来对应黄色框框预设置数值的,形象的表达了当前真是状态与要保持的状态之间差别。
•白色框框,代表当前自动驾驶的数据信息,其中FD是姿态指挥仪开启的提示,途中IWF/55 DME---代表当前盲降信号的数据。
盲降信号的形式表达在黑色的框框里,两个黑框中,下面哪个代表航向道;右边那个代表下滑道。
菱形代表航向道和下滑道在飞机的什么位置上,比如此图代表航向道还在飞机的左边,下滑道在飞机的上边。
•右边的绿色框,代表下降/爬升率的向下指的时候说明飞机在下降,向上指代表爬升,角度代表爬升率和下降率的大小有刻度可以读,100进制可以在他下方以小白字方式显示出来。
飞机自动驾驶系统

自动驾驶系统什么是自动驾驶系统?自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。
不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。
自动驾驶系统能做些什么?在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能:∙保持机翼水平,不发生滚转。
∙保持飞机当前的仰俯角。
∙保持选定的飞行方向。
∙保持选定的飞行高度。
∙保持选定的上升率或下降率。
∙跟踪一个VOR电波射线(Radial)。
∙跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。
∙跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。
∙跟踪一个GPS航路。
在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。
这套系增加了以下功能:∙保持一个选定的飞行速度(空速或地速)。
∙消除有害的偏航。
∙帮助飞行员正确的手动控制飞机。
在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能:∙飞行管理计算机(Flight Management Computers)∙垂直方向导航(Vertical Navigation)∙横向导航(Lateral Navigation)∙飞行水平改变(Flight Level Change)∙机轮控制(Control Wheel Steering)∙自动降落(Autoland)为什么要使用自动驾驶仪?有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使用自动驾驶仪可以减小飞行员工作量,特别是在仪器飞行规则(Instrument Flight Rules)的时候。
ILS自动着陆系统基础知识
中国模拟飞行论坛ILS仪表着陆系统基础知识2012修订版本SINOFSX论坛– CCA08652012/4/25本教材由CCA –0865 授权于中国模拟飞行论坛SINOFSX 教学使用。
未经允许请勿转载,盗版必究!ILS自动着陆系统基础知识————————————————————————————————————航班信息:————————————————————————————————————机型:波音737-800涂装:深圳航空公司时间:北京时间2012年3月19日星期一早8点1刻天气:大雾,能见度500米位置:上海虹桥机场机场编码:ZSSS跑道:36L燃料:50% ————————————————————————————————————飞行计划开始:————————————————————————————————————————————————————————————————————————地面操作设置:————————————————————————————————————切换至2D飞行面板:速度:220节||备注:C-O开关:马赫/节切换||速度保持开关:SPEED||航向:001 ILS频率:110.3起飞前开启飞行指挥仪(FD)高度:2900英尺||高度保持开关(ALTHED)在高度显示器下面||导航保持开关:VORLOC (截获ILS航向道,需设置ILS频率)进场保持开关:APP (在截获下滑道后,开启可自动渐进降落)航向保持:001 ||开关:HDD在其下面||垂直速度保持:|| 上升:+1800 | 下降:-1800 ||释放机翼:10°————————————————————————————————————滑行:————————————————————————————————————1.通过ATC联系请求滑行至跑道2.得到许可后,滑行至起飞跑道并等待起飞讯号————————————————————————————————————起飞:————————————————————————————————————1.复述起飞讯号2.关闭停机刹车3.开启起飞滑行自动刹车:选择RTO位置|| 降落可选用1,2,3或者最大位置||4.推油:先推至40% 并检查各项仪表参数,如没有异常参数问题,推到90%加速起飞5.达到140节轻拉机头保持上升角度为10°仰角6.爬升率平稳后①. 收起落架,②. 150节收机翼到5 ,160节收到2,180节收到1。
飞机 自动驾驶教程
作为新手,需要了解的[wiki]自动驾驶[/wiki]内容有:AP:自动驾驶总开关,需要打开此开关,其他自动驾驶方起作用,热键为键盘Z。
IAS/MACH(自动速度)与AT(自动油门):必须打开自动油门AT,才能调[wiki]节[/wiki]自动速度。
如果点击IAS,则自动保持节数速度,即速度为……节;如果点击MACH,则自动保持为马赫数,马赫为音速单位。
HDG:自动航向,飞机会按设置航向飞行。
ALT:自动高度,如果设置值与真实值相同时,则高度保持;否则会自动设置垂直速度VERT SPEED,即爬升率下降率,也可以手工调节。
了解了这些指令,你可以自由在天空飞翔了。
1 - 自动驾驶仪总开关(Autopilot Master Switch) 自动驾驶仪总开关打开时,使其他设置和选择开始起作用,并会自动调[wiki]节[/wiki]保持机翼水平,保持当前的仰俯角度。
当自动驾驶打开时,你无法用控制杆或鼠标来控制飞机,这一点和现实世界的自动驾驶仪是一致的。
也就是说,要么是自动驾驶仪控制飞机,要么是飞行员控制飞机。
当自动驾驶仪打开时,它将会控制仰俯(Pitch)和滚转(Roll),并且和飞行指挥仪(Flight Director)的仰俯和滚转命令显示相关联(这一点并不适用所有机型)。
自动驾驶不会只控制仰俯或只控制滚转,飞行指挥仪也不会只显示仰俯命令或只显示滚转命令。
所有的自动驾驶仪模式按钮(Mode Buttons),比如航向模式(Heading Mode),高度模式(Altitude Mode),导航模式(Navigation Mode),只要在自动驾驶仪总开关打开时,就会起作用,自动驾驶仪会立即控制飞机转向,上升或下降到指定高度,截取航路。
由于这个原因,在打开自动驾驶仪总开关之前,要习惯性的去检查航向,高度,导航等参数的设置是否适当。
打开或关闭自动驾驶仪总开关:点击AP 按钮-or- 按Z 键2 - 航向选择器窗口(Heading Selection Window/Bug)当航向模式打开时,航向选择窗口可以使飞机向设定方向转向,并保持设定方向飞行。
LOFC2_雏鹰起航手册(最终版)

LOFC2联机教程LOFC2飞行技术交流杂谈一、新人找敌机的方法二、苏机雷达之敌我识别三、苏机空对空作战步骤简述四、超视距空战战法1、摆脱锁定2、甩掉导弹五、如何躲闪中距导弹的攻击六、常见的几种规避动作1、“眼镜蛇2、滚转和滚筒七、战术跟踪与反跟踪技巧八、机炮格斗缠斗基本的动作方法以及原理九、联机格斗体会十、LOFC2里快速配平方法十一、机场分布示意图十二、与AI的对战,新手空战技巧一、软件介绍:锁定:怒火危崖--- Lock On Flaming Cliffs 2 简介《锁定:现代空战2》是《锁定:现代空战》进化后的新一代游戏。
在《锁定:现代空战2》里,玩家可以再度操控前作中的所有飞机。
本作的游戏虚拟环境本是为《数字空战模拟》系列而开发的,最早始于《DSC:黑鲨》。
本作基于PC平台,空战模拟中玩家可操控的飞机包括如下现代战斗机:Su-27、Su-33、Su-25、Su-25T、MiG-29、MiG-29S、F-15C、A-10A。
游戏中描绘的地域包括西高加索山脉从库班河到格鲁吉亚一带。
《锁定:现代空战2》拥有全新的图形用户界面、新任务编辑器(编辑器里带有触发系统,玩家可以用它编写脚本、安排剧情)、更新换代的图像引擎、新任务剧情、以及其他诸多改进。
LOFC2采用了全新的用户图形界面,新的任务编辑器,其中包括数据输出系统和事件记录器,更新了图像引擎,添加了新的战役地图以及其他方面的优化和提高。
目前改进的内容如下:在地图视角中,我们可以看到,地理环境包括:大高加索地区、Krasnodarsky地区、Stavropolsky 边疆、Adygea国家、Karachay-Cherkess国家、Abkhazia国家以及格鲁吉亚。
以格鲁吉亚西部为起点使用了三维网格,使地图变得更加可视化。
俄罗斯和格鲁吉亚新增的机场有:Mineralnye Vody、Nalchik、Tshakaya、Kutaisi、Kobuleti、Batumi 等六个机场。
模拟飞行教程

减速板打开和关闭以及减速板预位和反推示意图:降前先预位,落地
开反推,打开或预位时全方位指示器上方指示器为
反之
减速板关闭状态,操纵杆位置 DOWN,方法 按“/”
减速板打开,操纵杆位置 UP,方法按 “/” 在空中减速和降落后使用 1-2 号发动机反推,发动机中间打开, 油门前两个小扳手位置竖起,方法长按 F2。停止反推按 F1 即可。
APP 进场保持开关,就是保证你的降落高度和航向的
ALTITUDE 高度设定情况,通过旋钮左右旋转设定
ALT HLD 高度保持开关
VERT SPEED
爬升下降率设定情况,可以通过拨动
操作
CMDA 自动驾驶总开关
其他需要知道的设备:按 F10 能看到该部分
N1 值设定 旋钮,重 要 !!通过 转动调整 N1 转速
我们准备后推了,机头向左,尾巴向右 90 度。按 SHIFT+P 后,并快 速按键盘上的 2 键(是字母上面的 2 不是小键盘的 2,1 是机头右尾 巴左,2 是机头左尾巴右),推的差不多了再次按 SHIFT+P 停止后推。
推出完毕自动油门预位并点亮 N1 按钮如下图:我们准备滑行了
3、 滑行前准备,目标地点 22 跑道口 控制方式,手柄右摇杆左右,或者键盘,关闭小键盘灯后才能使用 慢慢练习一下 速度不要快了 滑行几大要点:滑行时不要超过 25 节,过弯不要超过 10 节,中间 的轮子压着黄色的线走,快了就赶紧的刹车。 如果你觉得速度有点慢就把 N1 再调整大一些。不能太大哟! 这里为了能用 F11 的模式即看到飞机又知道多少速度信息,我告诉 大家个简单的方法 SHIFT+Z 按三次,在游戏顶部出现红色字母
为减少你的坠毁第一次游戏建议使用容易模式,在设置中点击“真实 性..”设置如下:
模拟飞行教程
名词
解释
045 代表当前航向
DIS 1NM 代表距离下个航点 1 海里
Zoom 代表地图显示 10 海里范围
10nm
ZHHH
WHA 为当前位置点到下一个位置点
图标
RNG 调整地图大小按钮
无 代表你在当前点的位置
表示你飞机现在的位置,绿色线为盲降区域,白色线为你下个要 无
给大家解读一下: LAT:XXX LON:XXX ALT:121FT MSL MAG 45 0.0KIAS WIND4 MAG @ 0 KTS. FRAMRS/SEC=19.9(XX OF 20FPS) +1.0GS FUEL 98% 翻译就是:全部是当前 东经 XX 北纬 XX 水平面高度:121 英尺 MSL 磁航向 45 度 速 度 0.0 节 风向 040 风速 0 节 帧数=19.9 帧(设定保护不超过 20 帧/秒) 重力+1.0G 油量 98% 到达跑道前先停一下:
开关,自动油门预位,飞行指挥仪 NO 导航模式 GPS 全部设定完成 我们准备起飞,松开停留刹车 CTRL+.,点亮 N1 按键,我们的飞机 速度会慢慢快起来。(该图为 N1 点亮前)
等待时机身的任何部 位不要超越此条界限!
在自己飞的时候看跑道上没有飞机就可以上跑道了。 4、 起飞前准备 滑到跑道上机头对准正前方
关闭 N1 按钮,再按 F1 让油门最小,打开停留刹车 CTRL+.调整磁 航向 224,N1 转速 95%,打开所有的灯和加热。
再次检查停留刹车 RTO 襟翼 5 度 速度 180 节 N195% 磁航向 224 高度 7500 英尺 爬升率 1800 英尺/分钟 点亮航向保持、高度保持
2016-2017年无人机自动驾驶仪(总结)
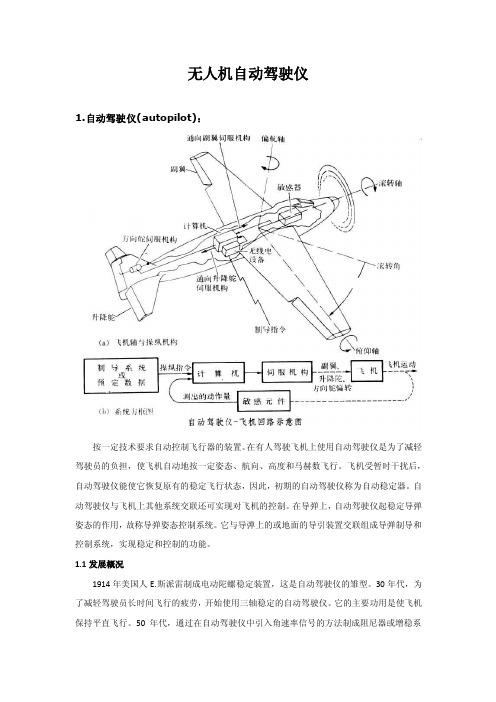
无人机自动驾驶仪1.自动驾驶仪(autopilot):按一定技术要求自动控制飞行器的装置。
在有人驾驶飞机上使用自动驾驶仪是为了减轻驾驶员的负担,使飞机自动地按一定姿态、航向、高度和马赫数飞行。
飞机受暂时干扰后,自动驾驶仪能使它恢复原有的稳定飞行状态,因此,初期的自动驾驶仪称为自动稳定器。
自动驾驶仪与飞机上其他系统交联还可实现对飞机的控制。
在导弹上,自动驾驶仪起稳定导弹姿态的作用,故称导弹姿态控制系统。
它与导弹上的或地面的导引装置交联组成导弹制导和控制系统,实现稳定和控制的功能。
1.1发展概况1914年美国人E.斯派雷制成电动陀螺稳定装置,这是自动驾驶仪的雏型。
30年代,为了减轻驾驶员长时间飞行的疲劳,开始使用三轴稳定的自动驾驶仪。
它的主要功用是使飞机保持平直飞行。
50年代,通过在自动驾驶仪中引入角速率信号的方法制成阻尼器或增稳系统,改善了飞机的稳定性。
50年代以来自动驾驶仪发展成为飞行自动控制系统。
50年代后期,又出现自适应自动驾驶仪,它能随飞行器特性的变化而改变自身的结构和参数。
60~70年代,数字式自动驾驶仪应运而生,它在“阿波罗”号载人飞船登月舱的登月过程中得到应用。
1.2原理和组成自动驾驶仪是模仿驾驶员的动作驾驶飞机的。
它由敏感元件、计算机和伺服机构组成。
当某种干扰使飞机偏离原有姿态时,敏感元件(例如陀螺仪)检测出姿态的变化;计算机算出需要的修正舵偏量;伺服机构(或称舵机)将舵面操纵到所需位置。
自动驾驶仪与飞机组成反馈回路,保证飞机稳定飞行。
1.3分类和特点自动驾驶仪可按能源形式、使用对象、调节规律等分类。
①按能源形式:分为气压式、液压式、电气式或者是这几种形式的组合。
现代超音速飞机多安装电气(或电子)-液压式自动驾驶仪。
气压式伺服机构主要用于导弹。
②按使用对象:分为飞机自动驾驶仪和导弹自动驾驶仪。
飞机自动驾驶仪多具有检测飞机姿态角的敏感元件,能稳定飞机的姿态角。
为了提高这种自动驾驶仪的稳定效果,可配合使用速率陀螺仪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动驾驶仪,自动油门,飞行指挥仪*** Intended For Flight Simulation Use ONLY * 仅供飞行模拟使用* 本文中所有术语的翻译,均以英文原文为准。
***什么是自动驾驶系统?自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。
不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。
自动驾驶系统能做些什么?在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能:•保持机翼水平,不发生滚转。
•保持飞机当前的仰俯角。
•保持选定的飞行方向。
•保持选定的飞行高度。
•保持选定的上升率或下降率。
•跟踪一个VOR电波射线(Radial)。
•跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。
•跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。
•跟踪一个GPS航路。
在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。
这套系增加了以下功能:•保持一个选定的飞行速度(空速或地速)。
•消除有害的偏航。
•帮助飞行员正确的手动控制飞机。
在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能:•飞行管理计算机(Flight Management Computers)•垂直方向导航(Vertical Navigation)•横向导航(Lateral Navigation)•飞行水平改变(Flight Level Change)•机轮控制(Control Wheel Steering)•自动降落(Autoland)为什么要使用自动驾驶仪?有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使用自动驾驶仪可以减小飞行员工作量,特别是在仪器飞行规则(Instrument Flight Rules)的时候。
你可以让自动驾驶仪帮助你完成一些辅助工作(比如象保持航向和高度),可以让你集中精力去完成其他一些与飞行安全相关的工作(比如导航,观察交通,通话等等)。
使用自动驾驶仪也会减轻你在完成一次长距离飞行后的疲劳程度。
在整个飞行进程中最危险的进近和降落阶段(尤其在是在云层中的颠簸时),如果飞行员已经被简单的飞行操作耗去了大量的精力和体力……。
两个最重要的准则当两个飞行员(比如一个教练,一个学员)轮流操作飞机,在任何时候他们会非常清楚现在谁在控制飞机。
当一个飞行员移交控制给另一个飞行员,他会说:“你来控制飞机。
”当第二个飞行员开始控制飞机时,他会说:“我来控制飞机。
”这种方法避免了两个飞行员同时控制飞机或者两个人都不在控制飞机的危险情况。
使用自动驾驶仪的话就不一样了。
两个最重要的准则就是在使用两轴或三轴自动驾驶仪时,要记住:1.自动驾驶仪关闭时,你控制飞机。
2.自动驾驶仪打开时,你监控和控制自动驾驶仪。
自动驾驶和飞行在任何时候都不要试图使用自动驾驶仪去完成你无法完成的事情,没有哪个飞行员能转一个120度的弯,并且截取定位信标,而当时飞机的飞行速度是300节,离定位信标却只有不到1英里,这个做法根本是不现实的。
如果你让自动驾驶仪轻松的完成你给定的任务,自动驾驶仪就会让你轻松完成飞行。
有了自动驾驶仪并不意味着你就可以睡大觉了。
使用自动驾驶仪的目的是使你有更多的注意力去完成其他重要的操作。
别茫然的盯着窗外傻看,你还有很多事情要做:•知道自己的位置。
虽然自动驾驶仪在控制飞机,但是你还是有责任去控制飞行的。
别指望自动驾驶仪会带你飞到目的地。
如果你在任何时候都知道自己的位置,就算自动驾驶仪出了问题,你也可以轻松的接手控制飞机。
•监控打开的自动驾驶仪功能。
可以自言自语,比如,“自动驾驶仪打开。
高度保持模式打开,将上升到平均海平面(Mean Sea Level)7000英尺。
航向保持模式打开,保持航向260,空中交通管制(Air Traffic Control)分配截取西雅图(Seattle)VOR 290航路。
•确定自动驾驶仪的操作是你想要的。
如果某些地方看起来不对,或者自动驾驶仪故障,立即断开自动驾驶:点击自动驾驶开关或者按Z键。
注意这个操作并没有断开自动油门控制,他们是两个相对独立的系统。
关闭自动油门控制:点击自动油门控制开关或按组合键Shift+R。
•监控引擎状态。
留一些注意力去检查引擎动力。
确定引擎的动力设置燃料的供应。
其他技巧在使用自动驾驶仪时要几点是需要注意的,下面这些要时刻紧记:•在自动驾驶仪打开状态下,不要试图用控制杆来控制飞机。
比如如果高度保持模式打开,然后用控制杆来手动飞行,自动驾驶仪会自动反向调整升降舵(Trim)来抵消控制杆的影响。
在现实飞行中会引发一些问题,特别当你在云层里飞行时。
当你断开自动驾驶仪时,会发现机头会突然抬的很高或降的很低,并且飞机会难以控制;或者当升降舵调节到达极限时,自动驾驶仪会自动断开。
有时也会出现这个情况,自动驾驶仪打开,你松开控制杆去打开飞行地图,或是去调节无线电频率时,飞机会进入螺旋(spiral)或失速(stall)或其他非预料的情况。
•在降落之前一定要断开自动驾驶仪。
FS2004中的所有飞机都没有装备自动降落(Autoland Capability)装置。
可以在最后进场边(Final Approach)时断开自动驾驶仪和自动油门控制,在决断高度(Decision Height)时,自动驾驶仪和自动油门控制必须断开。
•控制飞机是首要的,也是最重要的。
如果你发现在自动驾驶仪在你操作后没有反应或有某种问题。
先是手动控制飞行(如果有必要的话),然后在你的时间和注意力许可的情况下再去考虑遇到的问题。
•不要失去控制飞机的能力。
自动驾驶仪可以使你的工作变得简单,但是如果你过于依赖它的话,你可能会忘记如何去手动控制飞机飞行。
手动控制飞行会保持和提高你的飞行技术。
自动驾驶仪的操作不同类型飞机的自动驾驶仪会有一些小的差别。
在很多飞机里,自动驾驶仪是无线电装置(Radio Stack)的一部分,点击面板上的无线电图标,会显示出无线电装置。
在FS2004其他类型的飞机里(比如喷气机),自动驾驶仪是位于主仪器面板(Main Instrument Panel)也叫做“模式控制面板(Mode Control Panel)。
”你可以用鼠标改变自动驾驶仪的设置,点击面板上的按钮。
你也可能用鼠标设定航向,航路,高度和其他一些设置。
把手型的指针移到你要改变的数字上,等手型指针出了现+ 或–号时,点击鼠标就可以改变数字了(如果你的鼠标上面有滑轮的话,也可以滚动滑轮来调节)。
在阅读下面的内容时,请对照自动驾驶仪面板去了解每个控制钮的作用。
在FS2004中,不同的自动驾驶仪上面的控制钮可能会有一些差别,但是它们的作用是完全一样的。
Cessna , Beechcraft Baron 58 , Mooney M20M“Bravo”上装备的自动驾驶仪。
Boeing 737-400上装备的自动驾驶仪,飞行指挥仪控制钮,自动油门控制钮。
1 - 自动驾驶仪总开关(Autopilot Master Switch)自动驾驶仪总开关打开时,使其他设置和选择开始起作用,并会自动调节保持机翼水平,保持当前的仰俯角度。
当自动驾驶打开时,你无法用控制杆或鼠标来控制飞机,这一点和现实世界的自动驾驶仪是一致的。
也就是说,要么是自动驾驶仪控制飞机,要么是飞行员控制飞机。
当自动驾驶仪打开时,它将会控制仰俯(Pitch)和滚转(Roll),并且和飞行指挥仪(Flight Director)的仰俯和滚转命令显示相关联(这一点并不适用所有机型)。
自动驾驶不会只控制仰俯或只控制滚转,飞行指挥仪也不会只显示仰俯命令或只显示滚转命令。
所有的自动驾驶仪模式按钮(Mode Buttons),比如航向模式(Heading Mode),高度模式(Altitude Mode),导航模式(Navigation Mode),只要在自动驾驶仪总开关打开时,就会起作用,自动驾驶仪会立即控制飞机转向,上升或下降到指定高度,截取航路。
由于这个原因,在打开自动驾驶仪总开关之前,要习惯性的去检查航向,高度,导航等参数的设置是否适当。
打开或关闭自动驾驶仪总开关:•点击AP按钮-or-按Z键2 - 航向选择器窗口(Heading Selection Window/Bug)当航向模式打开时,航向选择窗口可以使飞机向设定方向转向,并保持设定方向飞行。
设定航向:•点击或拖曳航向钮(Heading Bug),它位于航向指示器(Heading Indicator)上的或位于水平姿态显示上(Horizontal Situation Display)。
-or-•或点击航向选择窗口。
-or-1.按组合键Shift+Ctrl+H选择航向钮2.按(等号)= 或(减号)–来转动航向钮在FS2004中的非喷气机中,你可以用航向钮来设定飞机的航向。
3 - 航向模式选择器按钮(Heading Mode Selector Button)航向模式选择按钮可以打开自动驾驶仪的航向模式(Heading Mode),使飞机自动转向到指定的方向,并且维持这一指定的飞行方向。
打开航向模式:•点击HDG按钮-or-•按组合键Ctrl+H4 - 高度选择窗口(Altitude Selection Window)当高度保持模式(Altitude Hold Mode)打开时,会使飞机上升或下降到指定的高度,并且保持这一指定高度飞行。
5 - 高度保持模式选择器按钮(Altitude Hold Mode Selector Button)高度保持模式选择按钮可以打开自动驾驶仪的高度保持模式。
当高度保持模式打开时,飞机会按垂直速度选择器(Vertical Speed Selector)上的设定垂直速度来上升或下降到指定高度。
6 - 垂直速度选择器窗口(Vertical Speed Selector Window)垂直速度选择器窗口可以调节飞机的上升率或下降率,使飞机按照指定的上升率或下降率,上升或下降到指定高度。
7 - 导航模式选择器按钮(Navigation Mode Selector Button)导航模式选择器按钮可以打开自动驾驶仪的导航模式,可以自动跟踪VOR航路,GPS航路,或导航定位信标。
当它打开时:•当NA V/GPS 开关选择NA V时,飞机会按照无线电装置上NA V1和VOR1的设定频率自动捕获和跟踪VOR 航路或定位信标。