脉冲采样
Z变换、采样保持以及数字控制器和数字滤波器的实现(重要)
部分分式法:
n =0 ∞
Ai X ( s) = ∑ i =1 s + p i
n
X ( z) = ∑
留数计算法:
i =1
n
n
Ai z z − e − piT0
z
pi T0
X ( z ) = ∑ res[ X ( p i )
i =1 n ⎧
z−e d ri −1 ⎡ z 1 ( s − p i ) ri X ( s ) = ∑⎨ ( ri − 1)! ds ri −1 ⎢ z − e sT0 ⎣ i =1 ⎩
本章结构
2-1 2-2 2-3 2-4 2-5 Z变换 脉冲采样和数据保持 从采样信号中重构原信号 脉冲传函 数字控制器和数字滤波器的实现
从采样信号中重构原信号
采样定理 • 如果采样频率比初始信号包含的最高频率还要 高,则连续信号的振幅特征可以在采样信号中保 留。 • 为了能不失真的从离散信号中恢复原有的连续信 号,采样频率必须大于等于原连续信号所含最高 频率的两倍,即
X ( z ) = Z [ X ( s )] = (1 − z −1 ) Z [
(1 − e−Ts ) X (s) = G ( s) s
G (s) ] s
• 如果 G( s) 带有一阶保持器 ,则 其Z变换 −Ts 2 Ts + 1 X ( z ) = Z [(1 − e ) G ( s )] 2 Ts Ts + 1 = (1 − z −1 ) 2 Z [ 2 G ( s )] Ts
连续信号 阶梯信号
图2-2 应用零阶保持器恢复信号
零阶保持器
其幅频特性和相频特性如图2-3所示
′ G h ( jω )
脉冲仪器操作方法
脉冲仪器操作方法
操作脉冲仪器的一般步骤如下:
1. 接通电源:将脉冲仪器插入电源插座,并按下电源开关将其打开。
2. 连接待测信号源:将待测信号源与脉冲仪器连接,一般通过信号线连接输入输出接口。
3. 设置参数:根据测试需求,设置脉冲仪器的工作模式、采样率、带宽等参数。
这些参数可以根据待测信号源的特性和所需测试结果进行调整。
4. 开始测试:确认参数设置无误后,按下仪器的启动或触发按钮,开始对待测信号进行测量。
脉冲仪器会根据设置的参数对输入信号进行采样、处理、显示等操作。
5. 数据分析与记录:根据脉冲仪器的显示结果,对待测信号进行分析。
可以使用仪器内置的分析工具,也可以将数据导出到计算机进行进一步分析。
同时,将测试结果记录下来以备后续参考。
6. 关闭仪器:测试结束后,按下仪器的停止按钮,将脉冲仪器关闭,并拔掉电源插头。
需要注意的是,具体操作方法可能因脉冲仪器的型号和功能而有所差异。
在使用脉冲仪器前,最好先查阅相应的使用手册,了解具体操作步骤和注意事项。
3采样过程与保持器特性
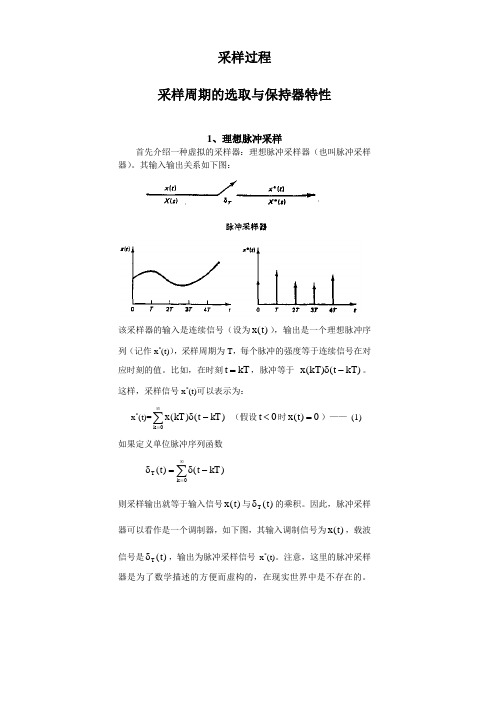
采样过程采样周期的选取与保持器特性1、理想脉冲采样首先介绍一种虚拟的采样器:理想脉冲采样器(也叫脉冲采样器)。
其输入输出关系如下图:该采样器的输入是连续信号(设为)t (x ),输出是一个理想脉冲序列(记作x *(t)),采样周期为T ,每个脉冲的强度等于连续信号在对应时刻的值。
比如,在时刻kT t =,脉冲等于 )kT t ()kT (x -δ。
这样,采样信号x *(t)可以表示为:x *(t)=∑∞=-δ0k )kT t ()kT (x (假设0t <时0)t (x =)—— (1)如果定义单位脉冲序列函数∑∞=-δ=δ0k T )kT t ()t (则采样输出就等于输入信号)t (x 与)t (T δ的乘积。
因此,脉冲采样器可以看作是一个调制器,如下图,其输入调制信号为)t (x ,载波信号是)t (T δ,输出为脉冲采样信号x *(t)。
注意,这里的脉冲采样器是为了数学描述的方便而虚构的,在现实世界中是不存在的。
对(1)式取 Laplace 变换:如果我们定义 z e Ts = 或者 z ln s 1=则有 ∑∞=-=*=0k k z ln s z )kT (x )s (X T 1 ——(2) 该式右边就是)t (x 的z 变换式,即)z (X )]t (x [Z z )kT (x )z ln (X )s (X 0k k T 1z ln s 1====∑∞=-*=*思考题:以上的理想脉冲采样过程是虚拟的,实际采样控制中的采样过程与此有何异同。
2、保持器的数学描述关于保持器,通常的说法是:在采样控制系统中,保持器是将离散的采样信号转换为连续信号的装置。
这样的解释是非常直观和粗略的。
目前我们关于保持器的认识应该是基于这样一个事实:我们将连续的信号离散化后,如果能够由这个离散信号再次完全地恢复原来的连续信号,那么离散化不会给系统带来任何问题。
在采样器后边添加保持器的目的就是恢复采样前的连续信号。
采样系统的典型结构图闭环脉冲传递函数

a)
1 S2
1( a
1 S
1 S
) a
查表得:
Z( GP( s)) S
Tz ( z 1)2
1( a
z
z 1
z
z e aT
)
∴ 有零阶保持器的开环系统脉冲传递 函数为:
G( z) (1 z1 )Z( GP( s)) S
西南民族大学
例二、设离散系统如图所示,其中
1
a
G1( s) S , G2( s) S a
第六章
离散系统
黄勤珍
西南民族大学
※ 6 — 1 线性离散系统
一、信号采样和复现
1、在采样控制系统中,把连续信号转变为 脉冲系列的过程 — 采样过程(采样)
实现采样的装置 — 采样器(开关)T 表示采 样周期(S) ,fs = 1/T (采样频率) (1/S) , 表示采样角频率。
ws
2fs
2
G1( z)
Z( ) S
z1
a
az
G2( z)
Z( S
) a
z
e aT
G(
z)
G1(
z)G2 (
z)
(
z
az 2 1)( z
e aT
)
az 3 C( z) G( z)R( z) ( z 1)2( z eaT )
西南民族大学
系统b:
a G1( s)G2( s) S( S a) G( z) G1G2( z) Z[ a ]
Z 域(朱利稳定判据)且满足:
D(1) > 0 , D(-1)
脉冲采样器的定义原理

脉冲采样器的定义原理脉冲采样器(Pulse Sampler)是一种电子仪器,用于将连续时间信号转换为离散时间信号。
它的原理是利用定时器和开关电路,对输入信号进行周期性的采样并保持。
脉冲采样器的基本原理是将输入信号与一个时钟信号进行交叉采样。
时钟信号的周期要小于输入信号中最高频率的周期,即满足奈奎斯特采样定理。
采样器中的开关电路在时钟信号的驱动下,周期性地打开和关闭,将输入信号的幅值“冻结”在一个瞬间,使得信号可以被离散地采样。
脉冲采样器的核心部件是开关电路。
常见的开关电路有电子开关、机械开关和固态开关等。
电子开关通过控制电压或电流来控制开关的导通与断开;机械开关通过机械接触的闭合与断开来实现开关的切换;固态开关则通过半导体材料的特性来控制电路的连接和断开。
脉冲采样器的工作过程如下:首先,时钟信号的频率和幅度决定了采样的间隔及量化的精度。
时钟信号驱动开关周期性地开关,将输入信号的幅值“冻结”在一个瞬间。
然后,在每个采样间隔内,输入信号的幅值被保持并传递到后续的处理电路中。
最后,在下一个采样间隔开始之前,保持电路将前一个采样值保持住。
脉冲采样器的设计要考虑以下几个方面:1. 时钟信号的频率选择:时钟信号的频率必须大于输入信号中最高频率的两倍,以满足奈奎斯特采样定理,防止采样过程中出现混叠现象。
2. 抗混叠滤波器:为了进一步防止混叠现象,采样器通常需要配备抗混叠滤波器,它可以滤除输入信号中的高频成分。
3. 保持电路设计:保持电路的设计要考虑到带宽、温度漂移、采样保持时间等因素,以确保采样值的精确性和稳定性。
4. 数字化:采样到的模拟信号还需要进行模数转换,即将连续时间信号转换为离散时间信号,进一步处理和存储。
脉冲采样器在实际应用中具有广泛的应用,特别是在通信系统中的信号处理和调制解调过程中。
它可以把连续的声音、图像等信息转换为数字信号,以便于后续的处理和传输。
同时,脉冲采样器还被广泛应用于科研、医学、测量仪器等领域,发挥着重要的作用。
脉冲编码调制及模拟信号的采样

1 T
M(f
n
nfs )(3-2-4)
例3.1 语音信号的频率为300-3400Hz,在通信系统中,如果 要让这样的模拟语音信号传送到接收端并能准备恢复出原始 信号,请问需要的最低采样频率是多少?
解:因为原始语音信号的频率在300-3400Hz范围内,所以
B=3400-300=3100>300,因而这样的语音信号是低通信号, 根据低通信号抽样定理,
3.2.2 低通模拟信号的抽样定理
图3.7 模拟信号的抽样过程
图3.7(b)是3.7(a)原始信号的频谱,图3.7(c)所示为一
个周期为T的脉冲信号,其表达式为:
T(t ) (t nT ) n
(3-2-1)
3.7(d)所示为的频谱,其表达式为:
(f
)
1 T
(f
n
nfs )
(3-2-2)
3.7(d)所示为抽样信号。抽样的过程实际上是用信号与抽
样脉冲相乘,因此抽样信号的表达式为:
ms(t ) m(t )T(t ) m(nT )(t nT )(3-2-3) n
图3.7(f)是的频谱,根据频域卷积定理可得:
M s(f)
M(f).ΔΩ(f)
1 T
M(f). δ(f
n
nfs )
带通信号:若某一信号的频率范围在f0到fH范围内,若B =fH-f0< f0,这样的模拟信号则称为带通信号。
低通信号抽样定理:一个频带限制在(0,fH)内的低通 模拟信号,如果抽样频率,则可由抽样信号序列无失真的复 原出原始信号。由于抽样时间间隔相等,因此又称为均匀抽 样定理。其抽样过程的时域和频域对照如图3.7所示。
fs =2 fH =2*3400=6800Hz
§3.6--信号抽样与抽样定理(信号抽样-时域抽样定理-连续时间信号的重建--)
所以抽样信号的频谱为
其中, 为抽样角频率, 为抽样间隔 , 为抽样频率,
在时域抽样(离散化)相当于频域周期化
频谱是原连续信号的频谱以抽样角频率为间隔周期地延拓,频谱幅度受抽样脉冲序列的傅立叶系数加权。
(1) 冲激抽样若抽样脉冲是冲激序列,则这种抽样称为冲激抽样或理想抽样。
谢谢大家
二、时域抽样定理
二、时域抽样定理
时域抽样定理的图解:假定信号 f (t)的频谱只占据 的范围,若以间隔 对 f (t)进行抽样,抽样信号 fs (t)的频谱 FS(ω) 是以 ωS 为周期重复,在此情况下,只有满足条件 各频移的频谱才不会相互重叠。这样,抽样信号 fs (t) 保留了原连续信号f (t)的全部信息,完全可以用 fs (t) 唯一地表示 f (t) ,或者说, f (t)完全可以由恢复出 fs (t) 。
§ 3.6 信号抽样与抽样定理
信号抽样也称为取样或采样,是利用抽样脉冲序列 p (t) 从连续信号 f (t) 中抽取一系列的离散样值,通过抽样过程得到的离散样值信号称为抽样信号,用 fs (t) 表示。
一、信号抽样
抽样的原理方框图:
一、信号抽样
连续信号经抽样后变成抽样信号,往往还需要再经量化、编码等步骤变成数字信号。这种数字信号经传输、处理等步骤后,再经过上述过程的逆过程就可连续信号频谱在周期重复过程中,各频移的频谱将相互重叠,就不能从抽样信号中恢复原连续信号。频谱重叠的这种现象称为频率混叠现象。
二、时域抽样定理
在满足抽样定理的条件下,可用一截止频率为 的理想低通滤波器,即可从抽样信号 fs(t) 中无失真恢复原连续信号 f (t) 。
三、连续时间信号的重建
因为所以,选理想低通滤波器的频率特性为若选定 ,则有理想低通滤波器的冲激响应为若选 ,则而冲激抽样信号为
脉冲采样器的定义原理

脉冲采样器的定义原理
脉冲采样器是一种用于对连续信号进行离散采样的设备或电路。
它的原理是将连续信号在一定时间间隔内进行采样,将连续的时间域信号转化为离散的序列信号。
脉冲采样器通常由以下几个部分组成:
1.采样电路:用于从连续信号中选择特定的瞬态信号进行采样。
采样电路可以是一个开关,通过在特定时间点打开或关闭,将信号采样并保持在采样保持电路中。
2.时钟源:用于提供规律的时间脉冲信号来控制采样电路的开关操作,以确定采样时间间隔。
时钟源通常由定时器或振荡器提供。
3.采样保持电路:用于将采样电路采样的瞬态信号转化为稳定的幅度保持信号,以便后续的处理和分析。
采样保持电路通常由电容器和电阻组成。
脉冲采样器的工作原理如下:
1.时钟源发送时间脉冲信号,控制采样电路的开关操作。
当时钟信号到达时,开关打开,允许连续信号通过采样电路。
2.开关打开的瞬间,采样电路选择性地采样连续信号的瞬态值。
采样时间间隔由时钟源提供的时间脉冲信号决定。
3.采样电路采样到的瞬态信号由采样保持电路保持,并转化为稳定的幅度保持信号。
通过脉冲采样器,连续信号在时间上被离散化为一系列的采样值。
这些采样值可以被存储、处理和分析,以实现对连续信号的数字化处理和传输。
脉冲采样器在模拟与数字信号转换、数据采集与处理等领域起着重要的作用。
采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具...[技巧]
![采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具...[技巧]](https://img.taocdn.com/s3/m/5a3c260015791711cc7931b765ce050876327515.png)
采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具...采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
PWM控制的基本原理很早就已经提出,但是受电力电子器件发展水平的制约,在上世纪80年代以前一直未能实现。
直到进入上世纪80年代,随着全控型电力电子器件的出现和迅速发展,PWM控制技术才真正得到应用。
随着电力电子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM控制技术获得了空前的发展。
到目前为止,已出现了多种PWM控制技术,根据PWM控制技术的特点,到目前为止主要有以下8类方法。
1 相电压控制PWM1.1 等脉宽PWM法[1]VVVF(Variable Voltage Variable Frequency)装置在早期是采用PAM(Pulse Amplitude Modulation)控制技术来实现的,其逆变器部分只能输出频率可调的方波电压而不能调压。
等脉宽PWM法正是为了克服PAM法的这个缺点发展而来的,是PWM法中最为简单的一种。
它是把每一脉冲的宽度均相等的脉冲列作为PWM波,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。
相对于PAM法,该方法的优点是简化了电路结构,提高了输入端的功率因数,但同时也存在输出电压中除基波外,还包含较大的谐波分量。
1.2 随机PWM在上世纪70年代开始至上世纪80年代初,由于当时大功率晶体管主要为双极性达林顿三极管,载波频率一般不超过5kHz,电机绕组的电磁噪音及谐波造成的振动引起了人们的关注。
脉冲编码调制技术的实现步骤

脉冲编码调制技术的实现步骤
脉冲编码调制(PCM)是一种将模拟信号转换为数字信号的技术,通常用于数字通信系统中。
下面是 PCM 技术的实现步骤:
1. 采样:对模拟信号进行采样,以获取离散的样本值。
采样频率
通常为信号最高频率的两倍以上,以确保能够正确地表示原始信号。
2. 量化:对采样得到的样本值进行量化,将其转换为有限数量的
离散值。
量化过程中,通常会将样本值映射到一组预定的量化级别上,每个量化级别对应一个数字编码。
3. 编码:对量化后的数字编码进行编码,以便在数字通信系统中
传输。
常用的编码方式包括二进制编码、格雷码编码等。
4. 传输:将编码后的数字信号通过数字通信系统进行传输,例如
通过数字通信信道或数字存储介质。
5. 解码:在接收端,对接收到的数字信号进行解码,将其还原为
量化后的数字编码。
6. 量化:对解码得到的数字编码进行量化,将其转换回采样后的
样本值。
7. 重构:使用量化后的样本值重构原始模拟信号。
需要注意的是,PCM 技术在实现过程中可能会引入量化误差和噪声,因此需要在设计和实现过程中进行优化,以提高系统的性能和质量。
等效采样超宽带窄脉冲接收电路设计
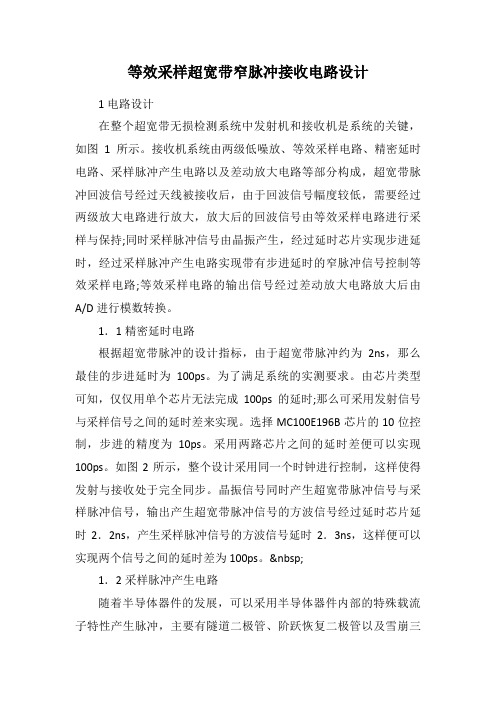
等效采样超宽带窄脉冲接收电路设计1电路设计在整个超宽带无损检测系统中发射机和接收机是系统的关键,如图1所示。
接收机系统由两级低噪放、等效采样电路、精密延时电路、采样脉冲产生电路以及差动放大电路等部分构成,超宽带脉冲回波信号经过天线被接收后,由于回波信号幅度较低,需要经过两级放大电路进行放大,放大后的回波信号由等效采样电路进行采样与保持;同时采样脉冲信号由晶振产生,经过延时芯片实现步进延时,经过采样脉冲产生电路实现带有步进延时的窄脉冲信号控制等效采样电路;等效采样电路的输出信号经过差动放大电路放大后由A/D进行模数转换。
1.1精密延时电路根据超宽带脉冲的设计指标,由于超宽带脉冲约为2ns,那么最佳的步进延时为100ps。
为了满足系统的实测要求。
由芯片类型可知,仅仅用单个芯片无法完成100ps的延时;那么可采用发射信号与采样信号之间的延时差来实现。
选择MC100E196B芯片的10位控制,步进的精度为10ps。
采用两路芯片之间的延时差便可以实现100ps。
如图2所示,整个设计采用同一个时钟进行控制,这样使得发射与接收处于完全同步。
晶振信号同时产生超宽带脉冲信号与采样脉冲信号,输出产生超宽带脉冲信号的方波信号经过延时芯片延时2.2ns,产生采样脉冲信号的方波信号延时2.3ns,这样便可以实现两个信号之间的延时差为100ps。
1.2采样脉冲产生电路随着半导体器件的发展,可以采用半导体器件内部的特殊载流子特性产生脉冲,主要有隧道二极管、阶跃恢复二极管以及雪崩三极管等常用的窄脉冲产生技术。
本文采用雪崩三极管单管放大电路,实现窄脉冲电路设计。
雪崩脉冲产生电路包括雪崩三极管、直流偏置电路和微分整形网络,方波信号经过微分整形网络提取脉冲的边缘,降低方波信号的占空比后作为雪崩三极管的输入信号,利用雪崩三极管的雪崩倍增效应结合整形网络整形后形成窄脉冲信号。
整个电路如图3所示,雪崩电路由直流偏置电压VC、电感L1、电容C2、电阻R3、R4和雪崩晶体管Q1组成。
[工学]第五章 数字信号处理1AD_DA_采样定律、能量泄漏
![[工学]第五章 数字信号处理1AD_DA_采样定律、能量泄漏](https://img.taocdn.com/s3/m/b3343a3efad6195f312ba6e1.png)
西安工业大学机电学院
(2)采样定理
上述情况表明,如果fs>2fm,就不发生频混现象,因此对 采样脉冲序列的间隔Ts须加以限制,即采样频率fs(1/Ts) 必须大于信号x(t)中的最高频率fm的两倍,即
f s > 2 fm 或 ω s > 2 ω m
为了保证采样后的信号能真实地保留原始模拟信号 的信息,采样信号的频率必须大于原信号中最高频 率成分的2倍。这是采样的基本法则,称为采样定 理。
西安工业大学机电学院
3.3 采样定理
采样是将采样脉冲序列p(t)与连续时间信 号x(t)相乘,取离散点x(nt)的值的过程。
西安工业大学机电学院
X(0), X(1), X(2), ……, X(n)
西安工业大学机电学院
1)采样信号的频谱 采样:等间隔的脉冲序列p(t)与连续时间信号x(t)相乘。 理想脉冲采样过程如下:
当采样信号的频率低于被采样信号的最高频率时,采样所得的信 号中混入了虚假的低频分量,这种现象叫做频率混叠。
西安工业大学机电学院
(1) 频混现象 频混现象又称频谱混叠效应:因采样频率过低造成信号失 真的现象。
f
频带范围为-fm~fm
f s f
其周期为fs=1/Ts
f s f
f
西安工业大学机电学院
•当采样周期Ts较小时,fs>2fm,周期谱图相互分离, 如图b; •当采样周期Ts较大时,fs<2fm,周期谱图相互重叠, 即谱图之间高频与低频部分发生重叠,如图 c,此即 频混现象,这将使信号复原时丢失原始信号中的高频 信息。
X ( f kf )
s
•一个连续信号经过理想采样以后,它的频谱将沿着 频率轴每隔一个采样频率fs ,重复出现一次,即其 频谱产生了周期延拓。
ADCP相关名词解释
ADCP相关名词解释深度单元 (depth cell or depth bin) :ADCP流速测量在水深方向(即垂线)上分好多层。
每一层即为一个测量单元。
实测流速是每一层(即单元)内流速的平均值。
一个单元相当于一个定点流速仪。
深度单元数目(number of depth cells):一般ADCP最多可以有128个单元。
用户可根据现场情况和需要设定单元数目。
最大剖面范围(maximum profiling range):指ADCP能够提供有效数据的距离范围(即离ADCP的距离)。
最大剖面范围取决于A DCP声信号发射,接收和处理方法,系统频率,深度单元尺寸,水体含沙量,温度,盐度等。
脉冲 (ping):指ADCP完成一次信号发射,接收,和处理,即完成一次采样。
Pulse脉冲发射速率(ping rate):指ADCP在单位时间内完成一次信号发射,接收,和处理(即完成一次采样)的次数。
集合或剖面(ensemble或profile ):由多次脉冲 (ping)采样进行平均的结果。
ADCP输出的数据通常都是相应于集合或剖面的。
即多次脉冲采样的平均值。
时间平均步长(time-averaging interval ):相应于集合或剖面的时间或周期。
在时间平均步长内的所有脉冲采样值经过平均后输出。
分辨率 (resolution):这里讨论的分辨率为ADCP测量的空间分辨率和时间分辨率。
对于仰视或俯视的ADCP ,空间分辨率通常以深度单元的尺寸来量度。
单元尺寸越小,空间分辨率越高。
时间分辨率通常以满足某一精度测量要求的时间平均步长来量度。
精度要求越高,所需的时间平均步长越长,即时间分辨率越低。
值得注意的是,空间分辨率和时间分辨率是相关的。
对于一定的精度要求,提高空间分辨率(即采用较小的深度单元)则会降低时间分辨率。
反之,降低空间分辨率(即采用较大的深度单元)则会提高时间分辨率。
另外,当应用ADCP 进行走航测量时,时间分辨率乘以船速即为水平方向的空间分辨率。
自动控制原理--脉冲传递函数及采样系统的分析

系统输出
Y
(z)
G1G2
(
z)E(z)
1
G1G2 (z) G1G2H (z)
R(z)
闭环系统的误差脉冲传递函数
E(z)
1
Ge (z) R(z) 1 G1G2H (z)
闭环系统脉冲传递函数为
GB (z)
Y (z) R(z)
G1G2 (z) 1 G1G2H (z)
当系统有扰动作用时 ,可得闭环系统的误差与扰动间 的脉冲传递函数为
2
r t
et T
e* t
1 eTs s
100.5s 1
yt
s2
解:系统的开环脉冲传递函数为
G(z)
(1
z 1 ) Z
10(0.5s s3
1)
z
1 5T 2z(z 1)
z
(z 1)3
5Tz (z 1)2
解:系统的开环脉冲传递函数为
G(z)
(1
z 1 ) Z
10(0.5s s3
1)
x
x
x
xx
x
暂态响应与极点位置关系
• 1)当闭环脉冲传递函数的极点位于z平面上以 原点为圆心的单位圆内时,其对应的暂态分量是 衰减的。
• 2)要使控制系统具有比较满意的暂态响应,其闭 环极点应尽量避免分布在Z平面单位圆内的左 半部,最好分布在单位圆内的右半部。
• 3)极点尽量靠近坐标原点,相应的暂态分量衰减 速度较快。
二、串联环节的脉冲传函
1、两个环节有采样开关时
rt
r*t G1s y1t
y1*t G2s
y*t yt
根据脉冲传递函数的定义:
G(z)
Y (z) R(z)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MOVX @DPTR,A ;送结束标志低点
MOV A,90H
MOVX @DPTR,A
MOV A,70H
MOVX @DPTR,A ;加粗结束标志
RET
数据传送子程序SJCS:
SJCS: MOV R6,#00H ;
4 用硬件实现脉冲的鉴相、计数
硬件计数在执行速度上有软件计数不可比拟的优势,通常采用多个可预置4位双时钟加减计数器74LS193 级联组成的加减计数电路。P0-P3为计数器的4位预置数据端,与数据输入锁存器相接;QA-QD 为计数器的4位数据输出端,与数据输出缓冲器相接;MR为清零端与上电清零脉冲相接;PL为预置允许端,由译码控制电路触发;CU 为加脉冲输入端,CD为减脉冲输入端;TCU为进位输出端,TCD 为借位输出端。如下图所示:
LOOP0: MOV P2,R6 ;
MOV R1,#00H
LOOP1: DJNZ R1,LOOP1
INC R6
CJNE R6,#04H,LOOP0
RET
//keil c6.20c 直接嵌入汇编的方法!(C51BBS网友cuiwei)
//<asm.h>
#ifdef ASM
我们可以把经过D触发器之后的脉冲,即方向控制脉冲(DIR)接到单片机的外部中断INT0端,同时经过反向器后再接到另一个外部中断INT1,并且把计数脉冲A接到单片机的片内计数器T0端即可,相对外部计数芯片来说,使用这种方法电路相对要简单的多。系统工作时,先要把两个中断设置成下降沿触发,并打开相应的中断。当方向判别脉冲(DIR)由低—高跳变时,INT1中断,执行相应的中断程序,进行加计数;而当方向判别脉冲由高—低跳变时,INT0中断,执行相应的中断程序,进行“减”计数(实际是重新复值,进行加计数)。下面是软件编程思路:
else
TR1=0; // 如果到了,停止T1计数
}
/////////////////3/
[51单片机] 用T0T1测量外部脉冲频率
/////////////////////////////////////
光电编码器输出脉冲的几种计数方法 2008-08-25 22:03:07| 分类: 编码器 | 标签: |字号大中小 订阅 .
#pragma endasm
return(x);
}
//end of asm.c
/*将此源文件加入要编译的工程文件,
//将光标指向此文件,选择右键菜单“option for file 'asm.c'”,
//将属性单“properties”中的“Generate Assembler SRC File”“Assemble SRC File”
5 利用单片机内部计数器实现可逆计数
对以上两种计数方法进行分析可知,用纯软件计数虽然电路简单,但是计数速度慢,难以满足实时性要求,而且容易出错,用外接加减计数芯片的方法,虽然速度快,但硬件电路复杂,由上图可以看出要做一个12位计数器需要5个外围芯片,成本也较高。那么我们能否用单片机内部的计数器来实现加减计数呢。我们知道,8051片内有两个16位的定时器:定时器0和定时器1,8052还有一个定时器2,这三个定时器都可以作为计数器来用。但8051内部的计数器是加1计数器,所以不能直接应用,必须经过适当的软件编程,来实现其“减”计数功能。硬件电路如下:
unsigned long int freq;
//TMOD=0xD1; //定时器0工作在定时方式1,定时器1工作在计数方式 1
TMOD=0x10;//定时器0工作在定时方式1,定时器1工作在计数方式 1
TH0=0x4B; //定时50ms
TL0=0xff;
1 引言
在位置控制系统中,为了提高控制精度,准确测量控制对象的位置是十分重要的。目前,检测位置的办法有两种:其一是使用位置传感器,测量到的位移量由变送器经A/D转换成数字量送至系统进行进一步处理。此方法虽然检测精度高,但在多路、长距离位置监控系统中,由于其成本昂贵,安装困难,因此并不适用;其二是使用光电编码器[1]。光电编码器是高精度控制系统常用的位移检测传感器。当控制对象发生位置变化时,光电编码器便会发出A、B两路相位差90度的数字脉冲信号。正转时A超前B90度,反转时B超前A90度。脉冲的个数与位移量成比例关系,因此通过对脉冲计数就能计算出相应的位移。该方法不仅使用方便、测量准确,而且成本较低,因此在电力拖动系统中,经常采用第二种位置测量方法。
while(1)
{
if (!scount) // 100ms 时间已到
{
resh=TH1; //取出计数值
resl=TL1;
TH1=0; // 计数值清零
TL1=0;
TH0=0x4B; //重装定时器
TL0=0xff;
当光电编码器顺时针旋转时, A相超前B相90°,D触发器输出/Q(W1)为高电平,Q(W2)为低电平,上面与非门打开,计数脉冲通过(W3),送至双向计数器74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门关闭,其输出为高电平(W4)。当光电编码器逆时针旋转时, A相比B相延迟90°,D触发器输出/Q(W1)为低电平,Q(W2)为高电平,上面与非门关闭,其输出为高电平(W3);此时,下面与非门打开,计数脉冲通过(波W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数[3]。
使用光电编码器测量位移,准确无误的记数起着决定性作用。由于在位置控制系统中,电机既可以正转,又可以反转,所以要求计数器既要能够实现加计数,又要能够实现减计数。相应的计数方法可以用软件来实现,也可以用硬件来实现。
使用软件方式对光电编码器的脉冲进行方向判别和计数降低了系统控制的实时性,尤其当使用光电编码器的数量较多时,并且其可靠性也不及硬件电路。但是用软件计数外围电路比较简单,所以在计数频率不高的情况下,使用软件计数还是有一定优势的。对编码器中输出的两路脉冲进行计数主要分两个步骤,首先要对编码器输出的两路脉冲进行鉴相,即:判别电机是正转还是反转;其次是进行加减计数,正转时加计数,反转时减计数。
//<asm.c>
#define ASM
#include <asm.h>
#include <reg52.h>
#pragma OT(4,speed)
unsigned long hiftR1(register unsigned long x)
{
#pragma asm
unsigned long shiftR1(register unsigned long);
#else
extern unsigned long shiftR1(register unsigned long);
#endif
//end of asm.h
刘永强 16:49:45
单片机数据采集系统的示波器接口源程序
汇编语言输出子程序SUCU:
SUCU: SETB P1.7 ;置外同步信号为高电平
MOV A,#0FFH ;置起始标志为高电平
MOV DPTR,#0400H ;置DAC0832地址
{
TR0=0; //关定时器
TH0=0x4B; //重装定时器值
TL0=0xff;
// TF0=0; // 相应中断后由硬件自动清零
scount--;
if(scount>0) // 查看是否已经到了100ms
TR0=1; // 如果没到 ,继续开定时器
当CU和CD中一个输入脉冲时,另一个必须处于高电平,才能进行计数工作。而从编码器直接输出的A、B两路脉冲不符合要求,不能直接接到计数器的输入端。但我们可以利用这两路脉冲之间的相位关系对其进行鉴相后再计数。下图给出了光电编码器实际使用的鉴相与双向计数电路,鉴相电路用1个D触发器和2个与非门组成,计数电路用3片74LS193组成。
MOVX @DPTR,A ;送起始标志高点
CPL P1.7 ; 外同步信号结束
INC A ; 置起始标志为0
MOVX @DPTR,A ;送起始标志低点
DEC A
MOVX @DPTR,A
TH1=0; // 计数值清零//
TL1=0;
scount=2; //定时100ms
ET0=1; // 开定时器0中断
ET1=1; // 开计数器1中断 !!!!!
EA=1; // 开总中断
TR0=1; //启动定时器和计数器
TR1=1;
scount=2; // 定时100ms
TR0=1; // 启动定时器计数器
TR1=1;
freq=(resh*256+resl)/10; //计算出脉冲数 ,因为只是计算100ms内的脉冲数,所以最后计算出的频率要除以10.
if((freq<800)||(freq>1920))//判断脉冲数是否已经出了规定的频率范围
//优化级别(这里的值是0-9)。
这个是给c语言里嵌套汇编
修改51单片机C语言程序(脉冲判断程序)
#include<reg52.h> //取出头文件
sbit out=P1^0;
unsigned char scount;
main()
{
unsigned char resh,resl;
{
out=0; //如果出了规定的范围,输出端输出低电平
}
else
{
out=1; // 如果还在规定范围内,输出端输出高电平
}
}
}
}
void timero_int()interrupt 1 //中断服务程序放在最后